
On the Stability of Incommensurate h-Nabla Fractional-Order Difference Systems

 and
and {kind=link}
{kind=link}
Abstract
:1. Introduction
2. Preliminaries and Basic Facts
- All roots z’s of the following characteristic equation:lie in the interior/exterior of the unit disk.
- All root λs of the following characteristic equation:lie in the exterior/interior of the set:
3. Stability Analysis of the Incommensurate h-Nabla FoDSs
3.1. Stability Analysis of Linear Incommensurate h-Nabla FoDSs
- If , then .
- If , then .
3.2. Stability Analysis of Nonlinear Incommensurate h-Nabla FoDSs
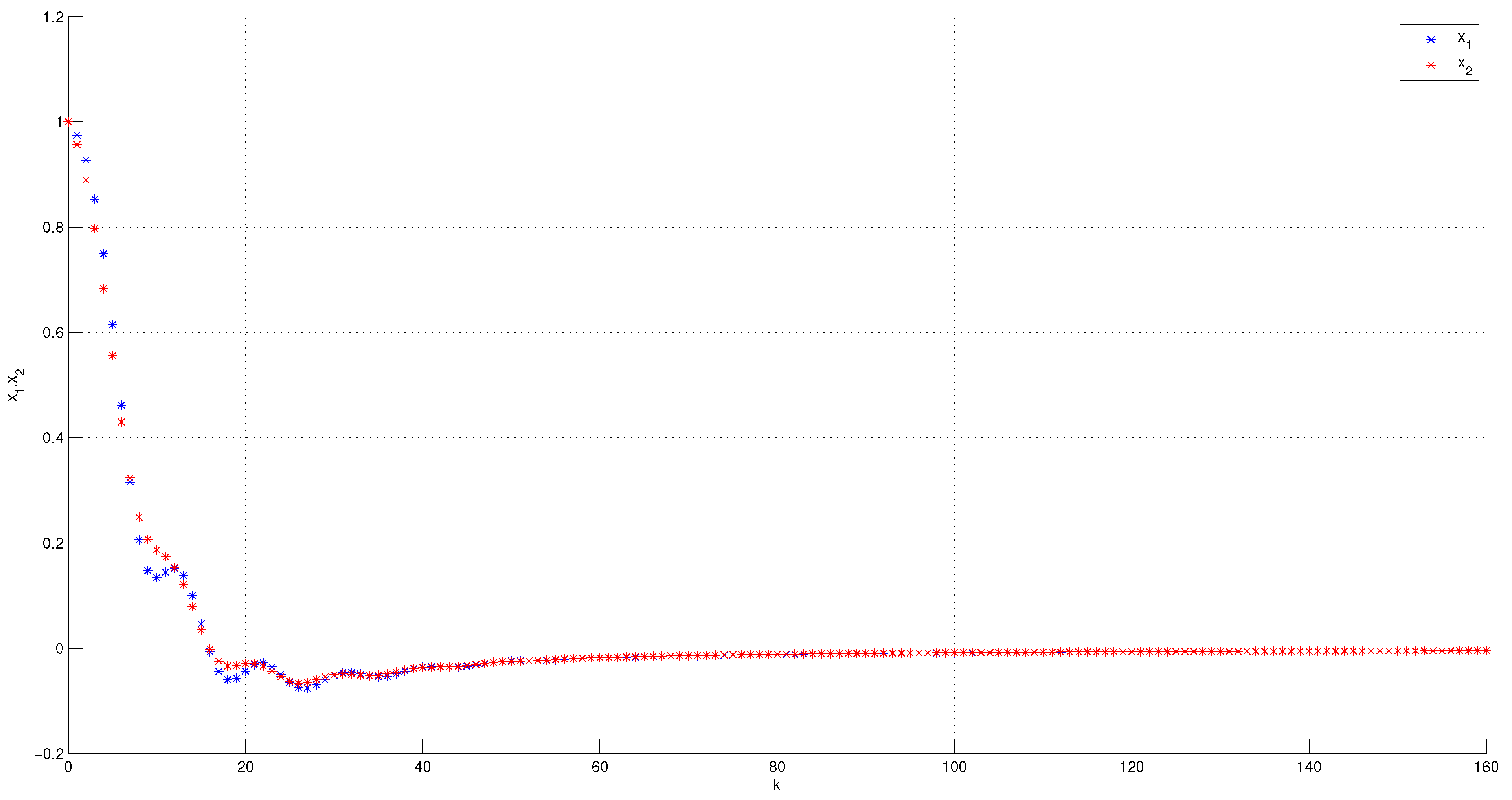
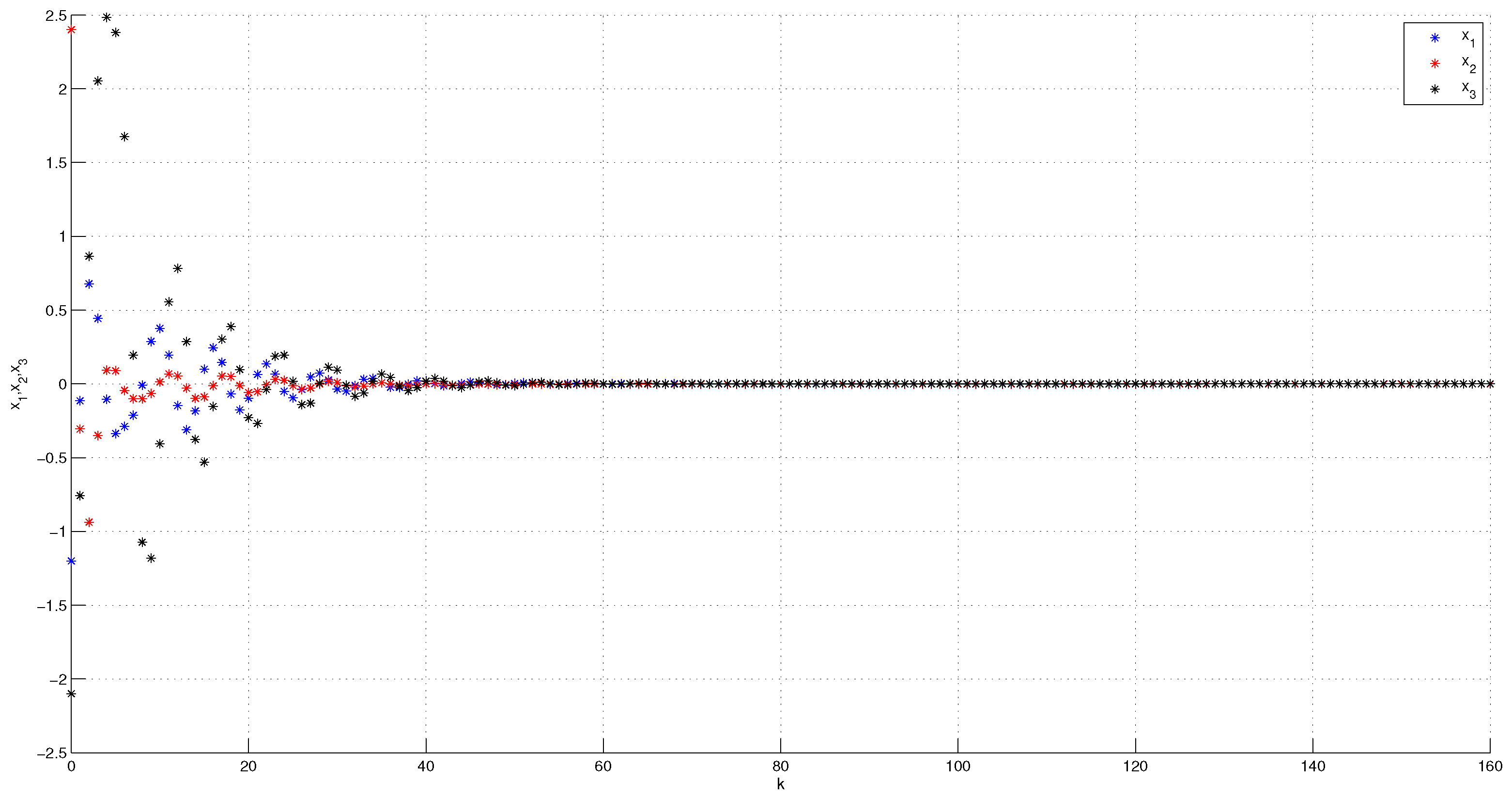
4. Illustrative Numerical Examples
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Liu, X.; Jia, B.; Erbe, L.; Peterson, A. Stability analysis for a class of nabla (q; h)-fractional difference equations. Turk. J. Math. 2019, 43, 664–687. [Google Scholar] [CrossRef]
- Matignon, D. Stability properties for generalized fractional differential systems. ESAIM Proc. 1998, 5, 145–158. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Chen, Y.Q.; Podlubny, I. Mittag–Leffler stability of fractional order nonlinear dynamic systems. Automatica 2009, 45, 1965–1969. [Google Scholar] [CrossRef]
- Li, Y.; Chen, Y.Q.; Podlubny, I. Stability of fractional-order nonlinear dynamic systems: Lyapunov direct method and generalized Mittag–Leffler stability. Comput. Math. Appl. 2010, 59, 1810–1821. [Google Scholar] [CrossRef] [Green Version]
- Čermák, J.; Nechvátal, L. On (q; h)-analogue of fractional calculus. J. Nonlinear Math. Phys. 2010, 17, 51–68. [Google Scholar] [CrossRef] [Green Version]
- Čermák, J.; Tomáš, K.; Nechvátal, L. Discrete Mittag–Leffler functions in linear fractional difference equations. Abstr. Appl. Anal. 2011, 2011, 565067. [Google Scholar] [CrossRef] [Green Version]
- Du, F.F.; Erbe, L.; Jia, B.G.; Peterson, A.C. Two asymptotic results of solutions for Nabla fractional (q; h)-difference equations. Turk. J. Math. 2018, 42, 2214–2242. [Google Scholar] [CrossRef]
- Du, F.F.; Jia, B.G.; Erbe, L.; Peterson, A.C. Monotonicity and convexity for nabla fractional (q; h)-differences. J. Differ. Equ. Appl. 2016, 22, 1124–1243. [Google Scholar] [CrossRef]
- Jia, B.G.; Chen, S.Y.; Erbe, L.; Peterson, A. Liapunov functional and stability of linear nabla (q; h)-fractional difference equations. J. Differ. Equ. Appl. 2017, 23, 1974–1985. [Google Scholar] [CrossRef]
- Segi Rahmat, M.R. The (q; h)-Laplace transform on discrete time scales. Comput. Math. Appl. 2011, 62, 272–281. [Google Scholar] [CrossRef] [Green Version]
- Segi Rahmat, M.R.; Noorani, M.S. Caputo type fractional difference operator and its application on discrete time scales. Adv. Differ. Equ. 2015, 2015, 160. [Google Scholar] [CrossRef] [Green Version]
- Fernandez-Anaya, G.; Nava-Antonio, G.; Jamous-Galante, J.; Munoz-Vega, R.; Hernández-Martínez, E.G. Lyapunov functions for a class of nonlinear systems using Caputo derivative. Commun. Nonlinear Sci. Numer. Simul. 2017, 43, 91–99. [Google Scholar] [CrossRef]
- Djenina, N.; Ouannas, A.; Batiha, I.M.; Grassi, G.; Pham, V.-T. On the Stability of Linear Incommensurate Fractional-Order Difference Systems. Mathematics 2020, 8, 1754. [Google Scholar] [CrossRef]
- Elaydi, S.; Murakami, S. Asymptotic stability versus exponential stability in linear volterra difference equations of convolution type. J. Differ. Equ. Appl. 1996, 940, 35–46. [Google Scholar] [CrossRef] [Green Version]
- Shatnawi, M.T.; Djenina, N.; Ouannas, A.; Batiha, I.M.; Grassi, G. Novel convenient conditions for the stability of nonlinear incommensurate fractional-order difference systems. Alex. Eng. J. 2022, 61, 1655–1663. [Google Scholar] [CrossRef]
- Talbi, I.; Ouannas, A.; Khennaoui, A.A.; Berkane, A.; Batiha, I.M.; Grassi, G.; Pham, V.T. Different dimensional fractional-order discrete chaotic systems based on the Caputo h-difference discrete operator: Dynamics, control, and synchronization. Adv. Differ. Equ. 2020, 2020, 624. [Google Scholar] [CrossRef]
- Khennaoui, A.A.; Ouannas, A.; Momani, S.; Batiha, I.M.; Dibi, Z.; Grassi, G. On Dynamics of a Fractional-Order Discrete System with Only One Nonlinear Term and without Fixed Points. Electronics 2020, 9, 2179. [Google Scholar] [CrossRef]
- Khennaoui, A.A.; Othman Almatroud, A.; Ouannas, A.; Mossa Al-sawalha, M.; Grassi, G.; Pham, V.T.; Batiha, I.M. An Unprecedented 2-Dimensional Discrete-Time Fractional-Order System and Its Hidden Chaotic Attractors. Math. Probl. Eng. 2021, 2021, 6768215. [Google Scholar] [CrossRef]
- Batiha, I.M.; Ouannas, A.; Emwas, J.A. A stabilization approach for a novel chaotic fractional-order discrete neural network. J. Math. Comput. Sci. 2021, 11, 5514–5524. [Google Scholar]
- Suwan, I.; Owies, S.; Abdeljawad, T. Monotonicity results for h-discrete fractional operators and application. Adv. Differ. Equ. 2018, 2018, 207. [Google Scholar] [CrossRef]
- Čermák, J.; Nechvátal, L. On a problem of linearized stability for fractional difference equations. Nonlinear Dyn. 2021, 10, 1253–1267. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Djenina, N.; Ouannas, A.; Oussaeif, T.-E.; Grassi, G.; Batiha, I.M.; Momani, S.; Albadarneh, R.B. On the Stability of Incommensurate h-Nabla Fractional-Order Difference Systems. Fractal Fract. 2022, 6, 158. https://doi.org/10.3390/fractalfract6030158
Djenina N, Ouannas A, Oussaeif T-E, Grassi G, Batiha IM, Momani S, Albadarneh RB. On the Stability of Incommensurate h-Nabla Fractional-Order Difference Systems. Fractal and Fractional. 2022; 6(3):158. https://doi.org/10.3390/fractalfract6030158
Chicago/Turabian StyleDjenina, Noureddine, Adel Ouannas, Taki-Eddine Oussaeif, Giuseppe Grassi, Iqbal M. Batiha, Shaher Momani, and Ramzi B. Albadarneh. 2022. "On the Stability of Incommensurate h-Nabla Fractional-Order Difference Systems" Fractal and Fractional 6, no. 3: 158. https://doi.org/10.3390/fractalfract6030158