
Robust Control for Variable-Order Fractional Interval Systems Subject to Actuator Saturation



1
School of Mechanical Engineering and Automation, Northeastern University, Shenyang 110819, China
2
School of Information Science and Engineering, Northeastern University, Shenyang 110819, China
3
College of Sciences, Northeastern University, Shenyang 110819, China
*
Author to whom correspondence should be addressed.
Fractal Fract. 2022, 6(3), 159; https://doi.org/10.3390/fractalfract6030159
Submission received: 22 February 2022
/
Revised: 6 March 2022
/
Accepted: 10 March 2022
/
Published: 15 March 2022
(This article belongs to the Special Issue Applications of Fractional Operator in Image Processing and Stability of Control Systems)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:In this paper, a class of variable-order fractional interval systems (VO-FIS) in which the system matrices are affected by the fractional order is investigated. Firstly, the sufficient conditions for robust stability of a VO-FIS with a unified order range of are proposed. Secondly, the stabilization conditions of a VO-FIS subject to actuator saturation are derived in terms of linear matrix inequalities (LMIs). Then, by using the proposed algorithm through an optimization problem, the stability region is estimated. To summarize, the paper gives a stabilization criterion for VO-FIS subject to actuator saturation. Finally, three numerical examples are proposed to verify the effectiveness of our results.
1. Introduction
In recent decades, there has been a continuing growth in the number of studies on the engineering applications of fractional-order systems (FOS) [1,2,3], and this control system has attracted more and more scholars’ attention [4,5,6,7,8]. This is principally because numerous physical systems that have fractional properties in the real world are marked by fractional-order state equations [9,10]. Stability is fundamental and important to all systems, certainly including FOS [11,12]. A basic theorem for the stability of FOSs was first proposed in [13]. Based on these previous works, many methods have been proposed to solve the stability and stabilization problems of FOSs [14,15,16]. Among them, using LMI to stabilize the FOS is an effective and systematic method. The fractional-order periods belonging to and are two forms of the existing LMI criteria [17,18,19,20]. For instance, [12] discussed the equivalent criterion for the stability of FOS with order in . In [13], the novel LMI-based stability conditions of FOS are proposed with order in and , respectively. An LMI criterion based on D-stability is proposed in [14], which describes the stability and robust stability of FOS with order in . In addition, for these two cases, the admissibility and stability of a singular FOS are proposed in [20,21,22,23] by LMIs.
Studies on the stability of fractional-order interval systems (FOIS) have attracted much attention [24,25]. However, because of the coupling uncertainty of the system matrix and the fractional order, there are still numerous challenges in the stability of FOIS [26,27]. The main reasons why stability research faces challenges include two aspects. First, the eigenvalues of a system matrix should be restrained in the left half of the complex plane [28,29,30]. By using the Matignon lemma [13], if the stability region satisfies , then FOS is stable. It obvious that if the eigenvalue of the system matrix is positive, the stability of the FOS is also guaranteed. Second, the bilinear matrix inequality (BMI)-based stabilization criteria are extremely complex, and it is not easy to design a controller for them [31,32]. Some assumptions for the stability of FOIS have been put forward to obtain a feasible solution, and these certainly lead to the conservatism.
Recently, variable-order fractional systems have seen significant development and become an international hotspot [33,34]. Variable-order fractional systems can describe many complex phenomena, such as complex diffusion in disordered porous media and in highly heterogeneous fractures [35,36]. The main reason is that the variable-order fractional operator in system modeling has a memory of previous appearances [37,38,39,40]. However, research on the stability of variable-order fractional systems is still a challenge in view of the complexity and diversity of variable-order fractional operators. In [41], the stability of variable-order fractional systems is examined using the Arzela–Ascoli theorem. As far as the author knows, little detailed or systematic study has ever been conducted on the stability of a system as follows:
where , and is a compact set in . Therefore, one of the innovations of this paper is that it combines variable-order fractional systems and fractional-order interval systems to study the stability of VO-FIS.
Actuator saturation will reduce the performance of the control system and even lead to instability. The direct method to not cause such performance degradation is to hold back actuator saturation by operating the control systems in the linear region of the actuator [42,43,44,45,46,47,48]. In [49,50,51], the set invariance conditions are established, and the stabilization of normal systems and singular systems under actuator saturation is discussed. The admissibility criteria in [50] are extended to fuzzy singular systems in [52]. Although [53] provides a method to stabilize FOS under input saturation, the algorithm given is to solve the BMI problem, which is difficult to calculate. This paper overcomes this difficulty and proposes an approach to estimate the stability domain directly by LMIs. In addition, many contributions in the two cases of constant order and are available, but unified results about the stability of VO-FIS in the case of have scarcely been reported. Moreover, the stabilization issue of VO-FIS with order subject to actuator saturation has not yet been reported. Therefore, it is very necessary to consider this kind of system.
Motivated by the above-mentioned research, the stabilization of VO-FIS is considered. The main contributions are as follows:
(i) In this paper, a new model of VO-FIS with order (0, 2) is proposed, and based on this system, the stabilization criterion in terms of LMIs is given. In addition, the paper considers the actuator saturation of the system, which expands the scope of application to a certain extent.
(ii) The stability region is estimated by solving an optimization problem in terms of LMIs according to the obtained stability conditions. At present, most studies have used algorithms to solve this problem. However, it is difficult to calculate in the simulation process.
(iii) Compared with the existing results in [28,29,30], our results are less conservative, since the eigenvalues of the system matrix are restrained in the left half of the complex plane of the references mentioned above. However, from the discussion of numerical simulation in the paper, it is easy to see that the eigenvalues of the system matrix of system (2) are restrained in the right half of the plane.
Notations: is the transpose of the matrix X. The symbols and denote the expressions and , respectively, while ⊗ stands for the Kronecker product. In addition, are the eigenvalues of X, and , , and for , where is the s-th row of x, and . The symbol co(X) represents the convex hull of a set of X.
2. Problem Formulation and Preliminaries
Consider an FOS subject to actuator saturation as follows:
where , and is a compact set in ; is the state of the system; is the control input; and and are known constant matrixes. The vector valued standard saturation function sat: is defined as:
The Caputo fractional derivative operator is defined as follows:
where n is an integer , and is the gamma function. The descriptions of the uncertain fractional order and uncertain matrix A are as follows:
where k is a given constant. Further, to deal with the uncertainty matrix , the following notations are introduced [26,27]:
where are given constants, and represents the i-th column of the identity matrix . Then, system (1) is denoted as follows:
By the state feedback controller , system (2) is described as
For convenience, replace with x in the following writing. Considering the relationship between and , for the matrices , the symmetric polyhedra is defined as
In order to derive our main results, the following lemmas are adopted.
Lemma 1
([49]). Letting , for ,
where represents a diagonal matrix whose diagonal elements become 1 or 0, Therefore, is expressed as
in which , . Then, system (3) is described as
Lemma 2
([53]). For , if system (2) is stable, then there is subject to, for each initial condition contained in the closed ball , the solution located in the closed ball.
Lemma 3
Lemma 4
Lemma 5
([13]). An FOS described by with order is stable iff .
Lemma 6.
If system
is stable, then system is stable.
Proof.
Since system (7) is stable, from Lemma 5, it is obtained that
According to , one has
Therefore, system is stable. □
3. Main Results
The stability and stabilization theorems for VO-FIS with order are obtained. The following theorem provides a sufficient condition which guarantees that system (2) with is stable.
Theorem 1.
System (2) with for the case is robustly stable if there exist , such that (6) holds and
where,
Proof.
Let us prove this problem in three cases. In the first case, for and , by using the Schur complement, and can be obtained from . Therefore, the following inequality can be obtained:
Therefore, it follows that
From Lemma 3, it is obvious that is stable. Then, from Lemma 5, it follows that system (2) with is stable.
In the second case, for and , one gets
Pre- and post-multiplying by and its transpose, respectively, where I is an identity matrix of appropriate dimensions, it is obtained that
By using the Schur complement, it implies
Applying Lemma 3, it follows that is stable, which implies that system (2) is stable by Lemma 6.
In the third case, for and , when , it is similar to the first case, when , it is similar to the second case. □
Remark 1.
Theorem 1 considers the stability condition when the system has no controller, but in practical application, there are few cases where the system can be stable without the controller. Therefore, we consider the condition of designing the controller to stabilize the system when the system is unstable.
Theorem 2.
System (2) for the case is robustly stable if there are subject to (6), and
where the definition of is defined in Theorem 1 and
where,
Then,
Proof.
Let us prove this problem in three cases. In the first case, for and , by using the Schur complement and , and by using the Schur complement lemma and the fact that , the following is deduced:
Therefore, it is easy to get
Letting , one has
Then,
According to Lemmas 1, 4, and 6, system (2) is stable for any
Next, the stability region is estimated. It can be obtained from (10) that
Then, it is obtained that
By Schur complement, (13) is equivalent to
Pre- and post-multiplying and its transpose, respectively, it follows that
By (14), one gets
Then,
From Lemma 2 and , it is not difficult to get
that is,
Therefore, is selected such that . Moreover, is used to estimate the stability region .
In the second case, for and , the proof is similar to .
In the third case, for and , it is deduced that when , it is similar to the first case. When , it is similar to the second case.
From Theorem 2, the stability domain is estimated through solving the following optimization problem:
□
4. Numerical Examples
In this section, three examples of stability and robust stabilization for VO-FIS are given.
Example 1.
Consider unforced FOIS (2) where , and
By using LMI toolbox in MATLAB, a feasible solution of (6) and (8) is obtained, as follows:
Example 2.
Consider FOIS (2) where , and
Then, by solving LMI (15), it follows and
Example 3.
Consider FOIS (2) where , and
By solving LMI (15), it follows that and
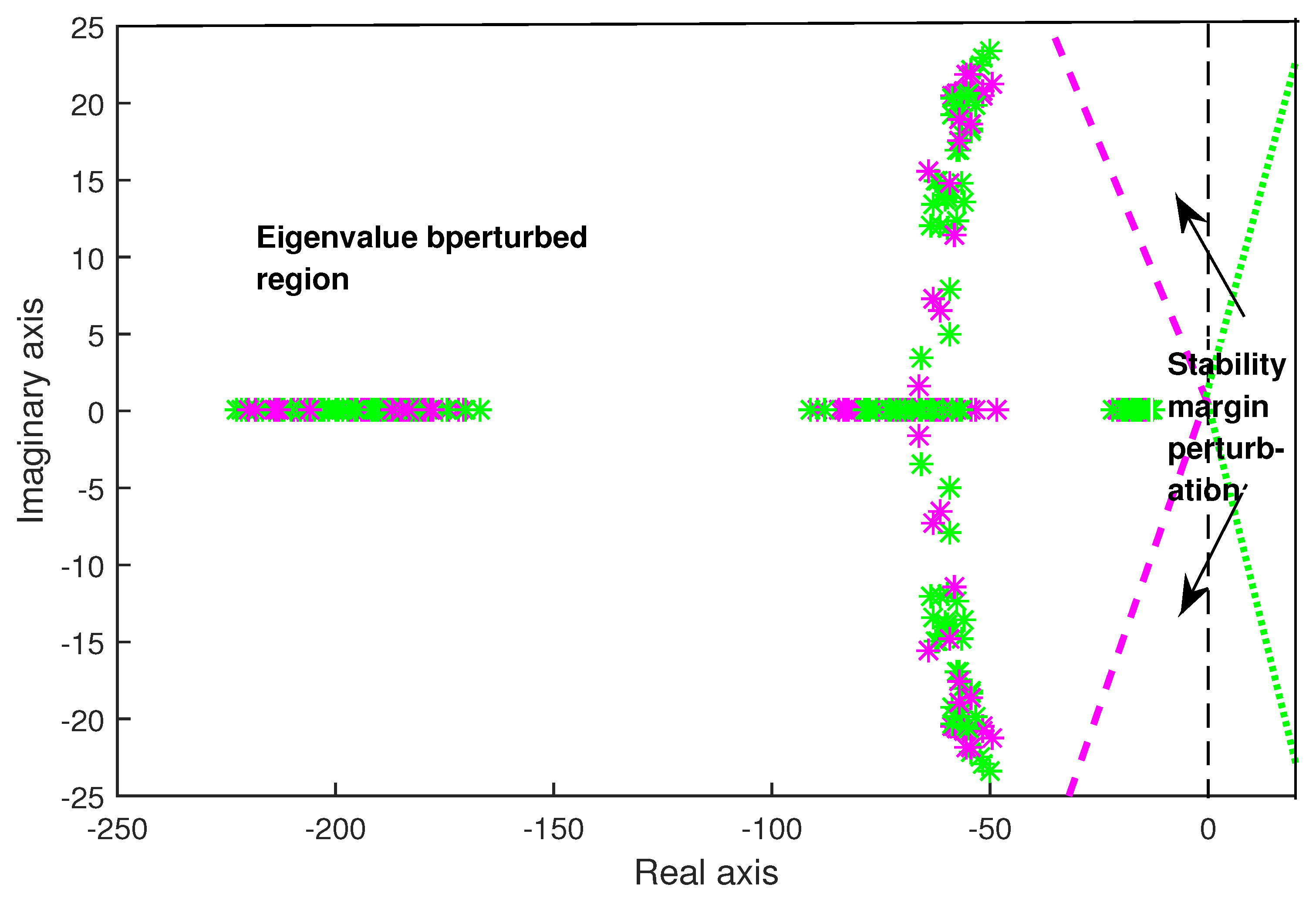
For unforced FOIS (2), Figure 1 shows the eigenvalue perturbed region. The purple and green line are boundaries of order and , respectively. The eigenvalue perturbed region is within the stability boundaries. Therefore, system (2) in Example 1 is stable. Compared with the existing results in [28,29,30], our results are less conservative, since the eigenvalues of system matrix are restrained in the left half of the complex plane of [28,29,30]. However, from Figure 1, it is easy to see that the eigenvalues of the system matrix of system (2) are restrained in the right half of the plane.
For system (2) with order , the stability region is depicted in Figure 2. The simulation result of Example 1 with initial condition is depicted in Figure 3. System (2) is stabilized by the state feedback controller in about 0.2 s.
For FOIS (2) with order , the simulation result of example 2 with the initial condition is depicted in Figure 4. System (2) is stabilized through the state feedback controller in about 0.4 s.
The eigenvalue perturbed region of FOIS (2) is shown in Figure 5. The purple and green line are edges of order and , respectively. The eigenvalue domain perturbed is within the stability boundaries. Therefore, system (2) is stable.
Remark 2.
In Example 3, the fractional order in [0.9, 1.4] is considered. It is worth emphasizing that the LMI conditions in [28,29,30] are infeasible, and they fail to solve the robust stability problems. However, in the paper, the LMI conditions in Theorem 2 are feasible. The stability of system (2) is illustrated. Therefore, the whole simulation in this control procedure is explained by its effectiveness.
Remark 3.
When the fractional order is , compared to the results in [28,29], the value range of the order of this manuscript is relatively large. For example, when = 0.5, the MATLAB solution result in [28,29] is that the best value of . This means that the solution is invalid, but in this manuscript, the equation has a feasible solution.
5. Conclusions
This paper’s contribution is to propose new sufficient LMI-based conditions for VO-FIS with order . The robust stabilization for VO-FIS subject to actuator saturation is further discussed. According to the obtained stabilization conditions, the stability domain by solving the optimization problem in terms of LMIs is estimated, since LMIs are calculated directly through the MATLAB toolbox. The next work to be done is to develop the output feedback control technique of FOIS and singular VO-FIS.
Author Contributions
Con-ceptualization, methodology, software, validation, R.L., Z.W., X.Z., J.R. and Q.G.; formal analysis, Z.W. and X.Z.; investigation, R.L., J.R. and Q.G.; resources, Z.W. and X.Z.; data curation, R.L., J.R. and Q.G.; writing—original draft preparation, R.L., Z.W. and J.R.; writing—review and editing, X.Z.; visualization, J.R. and Q.G.; supervision, R.L., Z.W. and X.Z.; project administration, R.L., Z.W. and J.R.; funding acquisition, X.Z. All authors have read and agreed to the published version of the manuscript.
Funding
National key research and development program topic (2020YFB1710003).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no confilct of interest.
References
- Mujumdar, A.; Tamhane, B.; Kurode, S. Observer-basedsliding mode control for a class of noncommensurate fractional-order systems. IEEE/ASME Trans. Mechatron. 2005, 20, 2504–2512. [Google Scholar] [CrossRef]
- Wei, Y.Q.; Liu, D.Y.; Boutat, D.; Chen, Y.M. An improved pseudo-state estimator for a class of commensurate fractional order linear systems based on fractional order modulating functions. Syst. Control Lett. 2018, 118, 29–34. [Google Scholar] [CrossRef]
- Liu, D.Y.; Zheng, G.; Boutat, D.; Liu, H.R. Non-asymptotic fractional order differentiator for a class of fractional order linear systems. Syst. Control Lett. 2017, 8, 61–71. [Google Scholar] [CrossRef] [Green Version]
- Narayanan, G.; Ali, M.S.; Alam, M.I.; Rajchakit, G.; Boonsatit, N.; Kumar, P.; Hammachukiattikul, P. Adaptive Fuzzy Feedback Controller Design for Finite-Time Mittag-Leffler Synchronization of Fractional-Order Quaternion-Valued Reaction-Diffusion Fuzzy Molecular Modeling of Delayed Neural Networks. IEEE Access 2021, 9, 130862–130883. [Google Scholar] [CrossRef]
- Syed Ali, M.; Hymavathi, M.; Kauser, S.A.; Rajchakit, G.; Hammachukiattikul, P.; Boonsatit, N. Synchronization of Fractional Order Uncertain BAM Competitive Neural Networks. Fractal Fract. 2022, 6, 14. [Google Scholar] [CrossRef]
- Poongodi, T.; Mishra, P.P.; Lim, C.P.; Saravanakumar, T.; Boonsatit, N.; Hammachukiattikul, P.; Rajchakit, G. TS Fuzzy Robust Sampled-Data Control for Nonlinear Systems with Bounded Disturbances. Computation 2021, 9, 132. [Google Scholar] [CrossRef]
- Rajchakit, G.; Chanthorn, P.; Kaewmesri, P.; Sriraman, R.; Lim, C.P. Global Mittag–Leffler Stability and Stabilization Analysis of Fractional-Order Quaternion-Valued Memristive Neural Networks. Mathematics 2020, 8, 422. [Google Scholar] [CrossRef] [Green Version]
- Humphries, U.; Rajchakit, G.; Kaewmesri, P.; Chanthorn, P.; Sriraman, R.; Samidurai, R.; Lim, C.P. Global Stability Analysis of Fractional-Order Quaternion-Valued Bidirectional Associative Memory Neural Networks. Mathematics 2020, 8, 801. [Google Scholar] [CrossRef]
- Sajad, P.; Hamed, M. Predictor-based fractional disturbance rejection control for LTI fractional order systems with input delay. Trans. Inst. Meas. Control 2020, 8, 61–71. [Google Scholar]
- Dinh, C.H.; Dao, T.H.Y. Functional interval observer design for singular fractional-order systems with disturbances. Trans. Inst. Meas. Control 2020, 8, 61–71. [Google Scholar]
- Farges, C.; Moze, M.; Sabatier, J. Pseudo-state feedback stabilization of commensurate fractional order systems. Automatica 2010, 46, 1730–1734. [Google Scholar] [CrossRef]
- Lin, C.; Chen, B.; Shi, P.; Yu, J.P. Necessary and sufficient conditions of observer-based stabilization for a class of fractional-order descriptor systems. Syst. Control Lett. 2018, 112, 31–35. [Google Scholar] [CrossRef]
- Matignon, D. Stability results on fractional differential equations with applications to control processing. Comput. Eng. Syst. Appl. 1996, 2, 963–968. [Google Scholar]
- Li, Y.; Chen, Y.Q.; Podlubny, I. Mittage-Leffler stability of fractional order nonlinear dynamic systems. Automatica 2009, 45, 1965–1969. [Google Scholar] [CrossRef]
- Wei, Y.H.; Peter, T.; Yao, Z.; Wang, Y. The output feedback control synthesis for a class of singular fractional order systems. ISA Trans. 2017, 69, 1–9. [Google Scholar] [CrossRef]
- Lenka, B.K. Fractional comparison method and asymptotic stability results for multivariable fractional order systems. Commun. Nonlinear Sci. Numer. Simulat. 2019, 69, 398–415. [Google Scholar] [CrossRef]
- Ahn, H.S.; Chen, Y.Q. Necessary and sufficient stability condition of fractional order interval linear systems. Commun. Nonlinear Sci. Numer. Simulat. 2008, 44, 2985–2988. [Google Scholar] [CrossRef]
- Sabatier, J.; Moze, M.; Farges, C. LMI stability conditions for fractional order systems. Comput. Math. Appl. 2010, 59, 1594–1609. [Google Scholar] [CrossRef]
- Zhang, J.X.; Yang, G.H. Low-complexity tracking control of strict-feedback systems with unknown control directions. IEEE Trans. Autom. Control 2019, 64, 5175–5182. [Google Scholar] [CrossRef]
- Zhang, X.F.; Chen, Y.Q. Admissibility and robust stabilization of continuous linear singular fractional order systems with the fractional order α: The 0 < α < 1 case. ISA Trans. 2018, 82, 42–50. [Google Scholar]
- Wei, Y.; Wang, J.; Liu, T.; Wang, Y. Sufficient and necessary conditions for stabilizing singular fractional order systems with partially measurable state. J. Frankl. Inst. 2019, 356, 1975–1990. [Google Scholar] [CrossRef] [Green Version]
- Marir, S.; Chadli, M.; Bouagada, D. A novel approach of admissibility for singular linear continuous-time fractional-order systems. Int. J. Control Autom. Syst 2017, 15, 959–964. [Google Scholar] [CrossRef]
- Ji, Y.D.; Qiu, J.Q. Stabilization of fractional-order singular uncertain systems. ISA Trans. 2015, 69, 53–64. [Google Scholar] [CrossRef]
- Liao, Z.; Peng, C.; Li, W.; Wang, Y. Robust stability analysis for a class of fractional order systems with uncertain parameters. J. Frankl. Inst. 2011, 348, 1101–1113. [Google Scholar] [CrossRef]
- Badri, P.; Sojoodi, M. Robust stabilisation of fractional-order interval systems via dynamic output feedback: An LMI approach. Int. J. Syst. Sci. 2019, 50, 1718–1730. [Google Scholar] [CrossRef]
- Gao, Z. Analytical method on stabilisation of fractional-order plants with interval uncertainties using fractional-order PIλDμ controllers. Int. J. Syst. Sci. 2019, 50, 935–953. [Google Scholar] [CrossRef]
- Zhang, X.F.; Zhao, Z.L. Robust stabilization for rectangular descriptor fractional order interval systems with order 0 < α < 1. Appl. Math. Comput. 2020, 366, 124766. [Google Scholar]
- Wang, L.M.; Zhang, G.S. Robust output consensus for a class of fractional-order interval multi-agent systems. Asian J. Control 2019, 69, 1679–1691. [Google Scholar] [CrossRef]
- Li, C.; Wang, J.C. Robust stability and stabilization of fractional order interval systems with coupling relationships: The 0 < α < 1 case. J. Frankl. Inst. 2012, 349, 2406–2419. [Google Scholar]
- Liang, S.; Peng, C.; Liao, Z.; Wang, Y. Robust analysis and synthesis for a class of fractional order systems with coupling uncertainties. Int. J. Control Autom. Syst 2015, 13, 494–500. [Google Scholar] [CrossRef]
- Zhang, J.X.; Yang, G.H. Robust adaptive fault-tolerant control for a class of unknown nonlinear systems. IEEE Trans. Ind. Electron. 2017, 64, 585–594. [Google Scholar] [CrossRef]
- Lu, J.G.; Chen, Y.Q. Robust stability and stabilization of fractional order interval systems with the fractional order α: The 0 < α < 1 case. IEEE Trans. Autom. Control 2010, 55, 152–158. [Google Scholar]
- Lorenzo, C.F.; Hartley, T.T. Initialization, conceptualization, and application in the (fractional) generalized calculus. Crit. Rev. Biomed. Eng. 2007, 35, 447–553. [Google Scholar] [CrossRef]
- Rossikhin, Y.A.; Shitikova, M.V. Application of fractional calculus for dynamic problems of solid mechanics: Novel trends and resent results. Appl. Mech. 2010, 63, 152–158. [Google Scholar] [CrossRef]
- Sun, H.G.; Chen, W.; Chen, Y.Q. Variable-order fractional differential operators in anomalous diffusion modeling. Phys. A Stat. Mech. Appl. 2009, 388, 4586–4592. [Google Scholar] [CrossRef]
- Yang, X.J.; Baleanu, D.; Srivastava, H. Local fractional similarity solution for the diffusion equation defined on Cantor sets. Appl. Math. Lett. 2015, 47, 54–60. [Google Scholar] [CrossRef]
- Ortigueira, M.D.; Valério, D.; Machado, J.T. Variable order fractional systems. Commun. Nonlinear Sci. Numer. Simul. 2019, 71, 231–243. [Google Scholar] [CrossRef]
- Meng, R.F.; Yin, D.S.; Zhou, C.; Wu, H. Fractional description of time-dependent mechanical property evolution in materials with Strain softening behavior. Appl. Math. Model. 2016, 40, 398–406. [Google Scholar] [CrossRef]
- Meng, R.F.; Yin, D.; Drapaca, C.S. Variable-order fractional description of compression deformation of amorphous glassy polymers. Comput. Mech. 2019, 64, 163–171. [Google Scholar] [CrossRef]
- Ramirez, L.E.; Coimbra, C.F. A variable order constitutive relation for viscoelasticity. Ann. Phys. 2007, 16, 543–552. [Google Scholar] [CrossRef]
- Jiang, J.F.; Chen, H.T.; Guirao, J.L.G.; Cao, D.Q. Existence of the solution and stability for a class of variable fractional order differential systems. Chaos Solitions Fractals 2019, 128, 269–274. [Google Scholar] [CrossRef]
- Qi, Y.W.; Xu, X.D.; Lu, S.W.; Yu, Y.Y. A waiting time based discrete event-triggered control for networked switched systems with actuator saturation. Nonlinear Anal. Hybrid Syst. 2020, 37, 100904. [Google Scholar] [CrossRef]
- Wang, Z.D.; Ho, D.W.C.; Dong, H.L.; Gao, H.J. Robust finite-horifzon control for a class of stochastic nonlinear time-xarying systems subject to sensor and actuator saturations. IEEE Trans. Autom. Control 2010, 55, 1716–1722. [Google Scholar] [CrossRef]
- Tharanidharan, V.; Sakthivel, R.; Mac, Y.K.; Ramya, L.S.; Anthoni, S.M. Finite-time decentralized non-fragile dissipative control for large-scale systems against actuator saturation. ISA Trans. 2019, 91, 90–98. [Google Scholar] [CrossRef]
- Xu, X.; Liu, L.; Feng, G. Semi-global stabilization of linear systems with distributed infinite input delays and actuator saturations. Automatica 2019, 107, 398–405. [Google Scholar] [CrossRef]
- Jin, X.Z.; Qin, J.H.; Shi, Y.; Zheng, W.X. Auxiliary fault tolerant control with actuator amplitude saturation and limited rate. IEEE Trans. Syst. Man Cybern. Syst. 2018, 48, 1816–1825. [Google Scholar] [CrossRef]
- Hu, Z.H.; Mu, X.W. Stabilization for switched stochastic systems with semi-Markovian switching signals and actuator saturation. Inf. Sci. 2019, 493, 419–431. [Google Scholar] [CrossRef]
- Chen, Y.G.; Wang, Z.D.; Fei, S.M.; Han, Q.L. Regional stabilization for discrete time-delay systems with actuator saturations via a delay-dependent polytopic approach. IEEE Trans. Autom. Control 2019, 64, 1257–1264. [Google Scholar] [CrossRef]
- Lin, Z.L.; Lv, L. Set invariance conditions for singular linear systems subject to actuator saturation. IEEE Trans. Autom. Control 2007, 52, 2351–2355. [Google Scholar] [CrossRef]
- Lv, L.; Lin, Z.L. Analysis and design of singular linear systems under actuator saturation and L2/L∞ disturbances. Syst. Control Lett. 2008, 57, 904–912. [Google Scholar] [CrossRef]
- Fang, H.J.; Lin, Z.L.; Hu, T.S. Analysis of linear systems in the prsence of actuator saturation and L2 disturbances. Automatica 2004, 40, 1229–1238. [Google Scholar] [CrossRef]
- Zhu, B.Y.; Zhang, J.J.; Zhang, Q.L.; Zhang, D.Q. Dissipative control for T-S fuzzy descriptor systems with actuator saturation and disturbances. J. Frankl. Inst. 2016, 353, 4950–4978. [Google Scholar] [CrossRef]
- Lim, Y.H.; Oh, K.K.; Ahn, H.S. Stability and stabilization of fractional order systems subject to input saturation. IEEE Trans. Autom. Control 2013, 58, 1062–1067. [Google Scholar] [CrossRef]
Figure 1.
Eigenvalue perturbed region of system (2) in Example 1 with .

Figure 2.
Stability domain in Example 2.
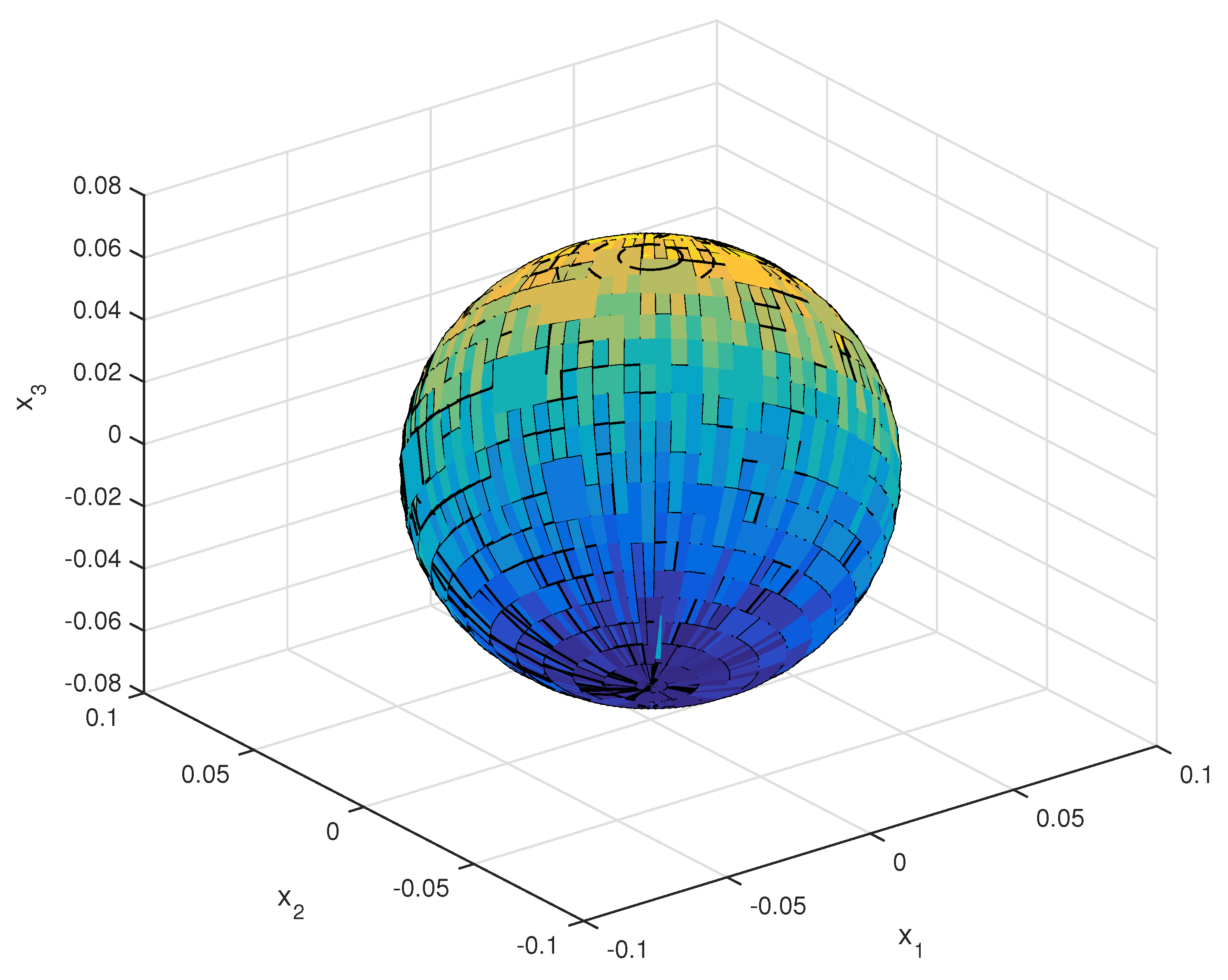
Figure 3.
The closed-loop FOS in Example 2.
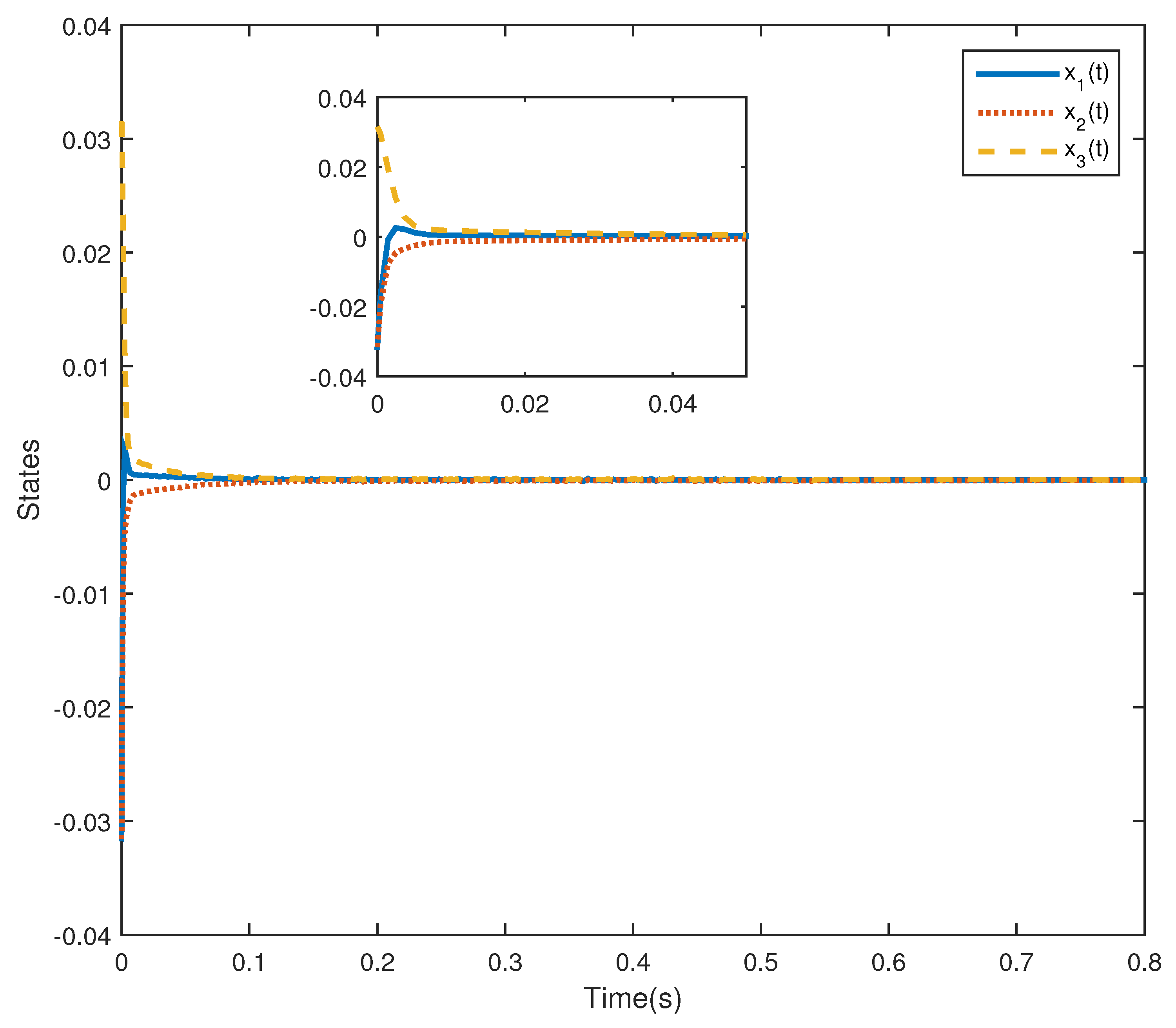
Figure 4.
The closed-loop FOS in Example 3.

Figure 5.
Eigenvalue perturbed region of system (2) in Example 1 with .
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Liu, R.; Wang, Z.; Zhang, X.; Ren, J.; Gui, Q. Robust Control for Variable-Order Fractional Interval Systems Subject to Actuator Saturation. Fractal Fract. 2022, 6, 159. https://doi.org/10.3390/fractalfract6030159
AMA Style
Liu R, Wang Z, Zhang X, Ren J, Gui Q. Robust Control for Variable-Order Fractional Interval Systems Subject to Actuator Saturation. Fractal and Fractional. 2022; 6(3):159. https://doi.org/10.3390/fractalfract6030159
Chicago/Turabian StyleLiu, Ri, Zhe Wang, Xuefeng Zhang, Jianxu Ren, and Qinglong Gui. 2022. "Robust Control for Variable-Order Fractional Interval Systems Subject to Actuator Saturation" Fractal and Fractional 6, no. 3: 159. https://doi.org/10.3390/fractalfract6030159