
Leader-Following Formation Control for Discrete-Time Fractional Stochastic Multi-Agent Systems by Event-Triggered Strategy


School of Mathematics and Statistics, Beijing Jiaotong University, Beijing 100044, China
*
Author to whom correspondence should be addressed.
Fractal Fract. 2024, 8(5), 246; https://doi.org/10.3390/fractalfract8050246
Submission received: 22 January 2024
/
Revised: 14 April 2024
/
Accepted: 17 April 2024
/
Published: 23 April 2024
(This article belongs to the Special Issue Synchronization and Adaptive Control for Fractional-Order Network Systems)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:Fractional differential equations, which are non-local and can better describe memory and genetic properties, are widely used to describe various physical, chemical, and biological phenomena. Therefore, the multi-agent systems based on discrete-time fractional stochastic models are established. First, some followers are selected for pinning control. In order to save resources and energy, an event-triggered based control mechanism is proposed. Second, under this control mechanism, sufficient conditions on the interaction graph and the fractional derivative order such that formation control can be achieved are given. Additionally, influenced by noise, the multi-agent system completes formation control in the mean square. In addition to that, these results are equally applicable to the discrete-time fractional formation problem without noise. Finally, the example of numerical simulation is given to prove the correctness of the results.
1. Introduction
In recent years, multi-agent systems have been instrumental in the field of robotics, involving multiple agents with autonomous decision-making and collaborative abilities. These systems enable the collective accomplishment of complex tasks through communication and cooperation. They are applied in diverse areas like unmanned aerial vehicle formations, robot collaborations, autonomous vehicles, and distributed sensor systems [1,2].
The key issue of multi-agent systems is the formation and adaptation in their development. Formation refers to a group of agents maintaining specific relative positions and exhibiting coordinated behavior while performing tasks. These formations can be either static, with agents maintaining fixed relative positions, or dynamic, allowing agents to flexibly adjust their positions during task execution. Solving formation problems is crucial for enhancing system efficiency, robustness, and collaborative capabilities. Solving the formation problem in multi-agent systems presents several challenges. First, determining the optimal formation configuration that satisfies task constraints and objectives is a complex optimization problem [3,4]. It involves considering factors such as agent capabilities [5], communication constraints [6], obstacle avoidance [7], and task-specific requirements [8]. Second, ensuring robustness and fault tolerance in formation is crucial, as agents may face uncertainties, failures, or communication disruptions during task execution [9,10]. Developing algorithms and strategies that can handle these uncertainties and maintain formation integrity is a significant research challenge. Finally, scalability is another important consideration, as the number of agents and the complexity of tasks increase. Efficient algorithms and communication protocols are required to handle large-scale multi-agent systems. Therefore, it is highly useful to study the problem of formation control in multi-agent systems.
Recently, the exploration of formation control in fractional systems has garnered considerable interest due to their capacity to capture intricate dynamics with memory and long-range dependencies [11,12]. Fractional systems, characterized by non-integer derivatives, have demonstrated promising applications across diverse domains, including control systems [13], signal processing [14], and optimization. By extending fractional dynamics to multi-agent systems, the formation control challenge in fractional multi-agent systems has emerged as a captivating and sought-after research area. Unlike conventional integer-order systems, fractional-order dynamics introduce memory effects and long-range interactions among agents, allowing for more sophisticated and nuanced formation control strategies [15,16,17]. Various control techniques have been employed and refined in the realm of fractional formation control, such as sliding-mode control [18,19], double-integrator control [20], and both-and-observer control [21]. Thus, building on these prior studies and the benefits of fractional-order control, the domain of fractional multi-agent system formation holds the potential to revolutionize numerous applications.
In practical scenarios, the prevalence of attacks and uncertainties necessitates considering the impact of the resulting perturbations on systems. As a result, many studies have utilized stochastic differential equations with noise terms to model systems. While the research on continuous-time stochastic systems has been significant, the control strategies proposed for continuous systems are often too idealized for direct application in real-world settings. Consequently, discrete-time stochastic systems have garnered considerable attention due to their enhanced realism and practicality. The researchers in Ref. [22] delved into finite-time
state estimation for discrete time-delayed stochastic systems using communication protocols. Additionally, Ref. [23] explored recursive fusion estimation for stochastic discrete-time-varying complex networks under stochastic communication protocols. To address energy consumption concerns in scenarios with limited resources, energy-efficient controllers are in high demand. Moreover, the fixed allocation of bandwidth can constrain communication between nodes in networks. To conserve resources and bandwidth, event-triggered control mechanisms are widely implemented in discrete-time stochastic systems. In Ref. [24], an event-triggered law was developed for discrete stochastic systems to ensure system stability. Ref. [25] investigated event-triggered control problems in the presence of packet loss. Furthermore, novel approaches for addressing event-triggered control problems in discrete-time stochastic systems were presented in the context of the pinning synchronization problem in Ref. [26] and the quasi-synchronization in probability problem in Ref. [27]. Compared to systems with continuous-time dynamics, discrete-time systems are more computationally implementable. Additionally, many real-world systems are not accurately captured by continuous dynamics. References [28,29,30] have explored intriguing questions concerning the consensus stability of discrete-time multi-agent systems. Notably, significant progress has been made in event-triggered control for integer discrete-time stochastic systems. This paper extends event-triggered control from integer discrete-time stochastic systems to fractional systems with time delay, with results applicable to both types of systems.
Inspired by the above, this paper investigates leader-following formation control for discrete-time fractional stochastic multi-agent systems by the event-triggered strategy. In summary, the contributions of this paper can be outlined as:
- (1)
- (2)
- (3)
- Pinning controllers and the corresponding sufficient conditions are provided to achieve mean square pinning consensus in the fractional stochastic networks.
- (4)
2. Preliminaries
Definition 1
([37]). The discrete-time difference operator of order α of function
is defined by
where 0 is the initial time. Take
for convenience, then
.
Lemma 1
([37]). For
, the function
satisfies the properties
for
and
.
Lemma 2
([38]). Consider a sequence of nonnegative random variables
with
. Let
where
Then,
converges to zero in the mean square, i.e.,
Lemma 3
([39]). Given a convergent series
, then
where
is a positive semidefinite matrix.
3. Problem Formulation
Consider the following discrete-time fractional stochastic multi-agent systems composed of the leader
and N followers
where
is the state of the i th agent at time k;
are system noises on
satisfying the following statistical properties:
and
is continuous nonlinear noise intensity function.
Assumption 1.
Assume noise intensity function
satisfied
Defining a formation using a vector
, where
represents the desired relative position of agent i with respect to the leader, the leader-following system is deemed to have achieved formation h in a mean square sense if
For this purpose, the control law is designed as follows:
where
represents the coupling strength. The matrix
is the internal linking matrix with
. The matrix
denotes the coupling configuration matrix, where
. If agent i can transmit information to agent j, then
, ensuring
for all
. A directed path from agent
to
is represented by a sequence of edges
. Drawing inspiration from pinning control concepts, only a small subset of agents are selected for control. Without loss of generality, control actions are applied to the first l agents. This implies
for
, and
for
.
According to Definition 1 and Equation (5), then Equations (1) and (2) can be rewritten as
where the function
represents a heavy-tailed discretization following a power-law distribution. In the context of a multi-agent system modeled by a discrete-time difference equation with specific “time-delays”, where
relies on all historical states
, it is essential to consider that the impact of historical states on
may diminish as the time-delay increases. In this scenario, the function
is selected as the weight function.
Remark 1.
Unlike in the literature [40,41,42] in the original text on system modeling, which investigates integer-order time delay for discrete systems, this paper considers fractional-order distributed time delay. The propagation delays are distributed over a period of time and may influence the control system to oscillate more. Hence, it is mandatory to investigate the formation control systems with fractional-order distributed delay. Additionally, differing from the literature [32,34] in the original text on system modeling, the systems mentioned in this paper add noise term
, which considers the effect of disturbance in real life, having real significance.
To minimize the frequency of controller updates and communication overhead, a distributed event-triggered strategy is employed for the system described in Equation (6). Assuming that the first l nodes in the network are under control (), a pinning event-triggered control system is formulated as:
where the time sequence
represents the event triggering time sequence for agent i, which is generated by the following event-triggered mechanism.
Remark 2.
The pinning control adopted in this paper only requires controlling a subset of nodes to achieve control over the entire system. Compared to non-pinning control [43], the control strategy proposed in this paper is simpler and more efficient. In addition, unlike traditional continuous control [44], event-triggered control only transmits and updates information when triggered, saving resources and bandwidth.
The sequence
for agent i is determined by the triggering condition specified in Theorem 1:
4. Main Result
Let
. From Equation (7),
Let
, then
Denote
and
, then
where
.
Thus,
Theorem 1.
Under Assumption 1, the system Equation (6) will realize formation control if there exists
such that
where
,
and the triggering condition as follows
where
,
and
.
Proof.
Construct the Lyapunov function as follows:
with
where
according to Lemma 1. Then
in Equation (3), then
Moreover,
According to Lemma 1, then
. From Lemma 3, then
Thus,
Furthermore,
Combining Equations (19)–(26) gives
Then, from Equation (18),
where
. Therefore,
where
.
Then, from Assumption 1, we can obtain
,
,
and
, which satisfies the condition of Lemma 2. Thus, from Lemma 2,
. □
5. Simulation
The directed communication graph given by Figure 1 is composed of four agents. The communication topology shown in Figure 1 has a spanning tree, with agent 1 as the root node. Let
, and the initial position is as follows:
Choose the formation vector
for the leader-following system. For the triggering condition (17),
It can be calculated that
, which satisfies the condition of Theorem 1. Note that the definitions of H and A are independent of
, so regardless of the sizes of H and A, it is always possible to find three sets suitable
and
such that
,
, and
, respectively. Therefore, we can assume that the event-triggering conditions used in this simulation are
,
, and
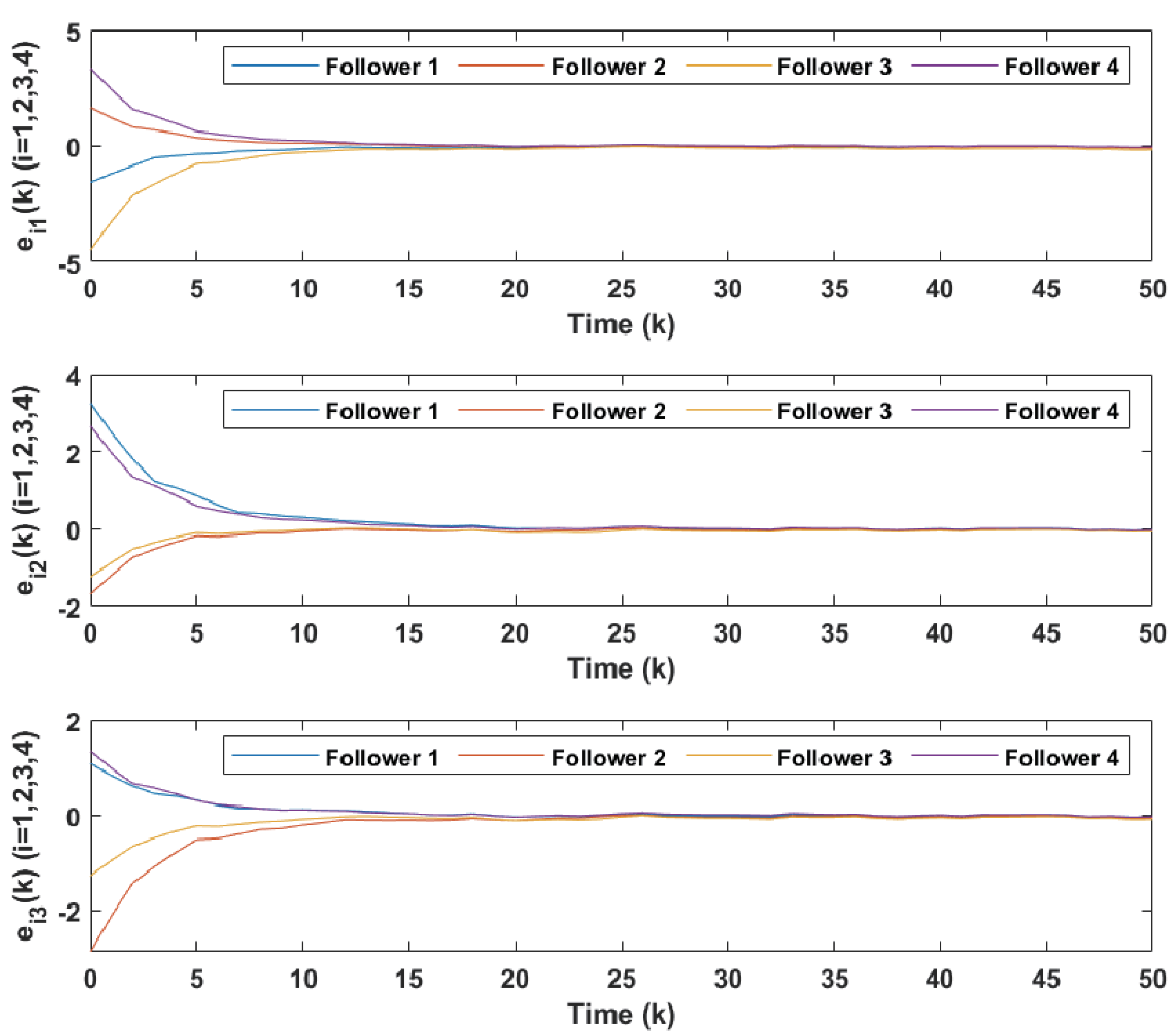
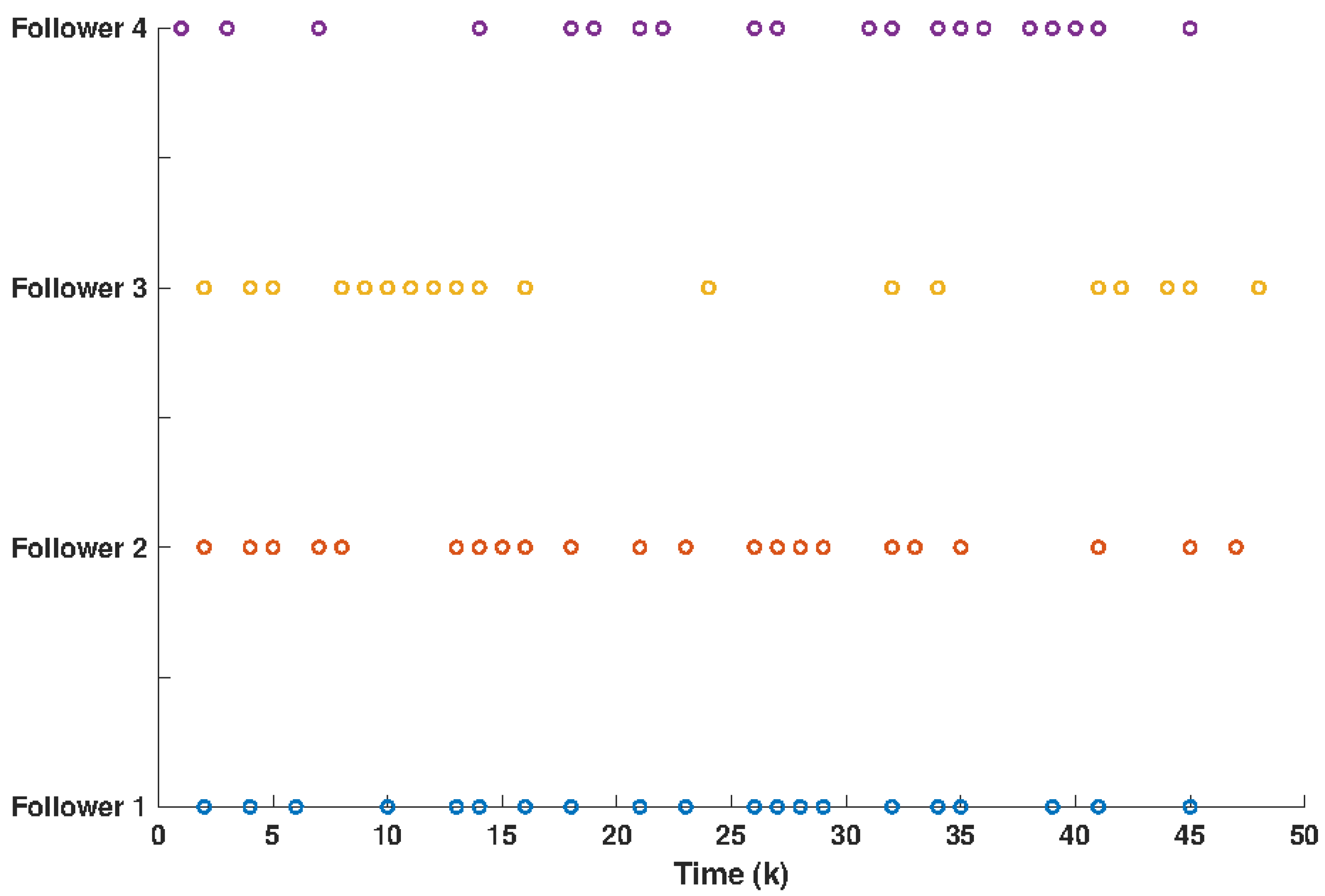
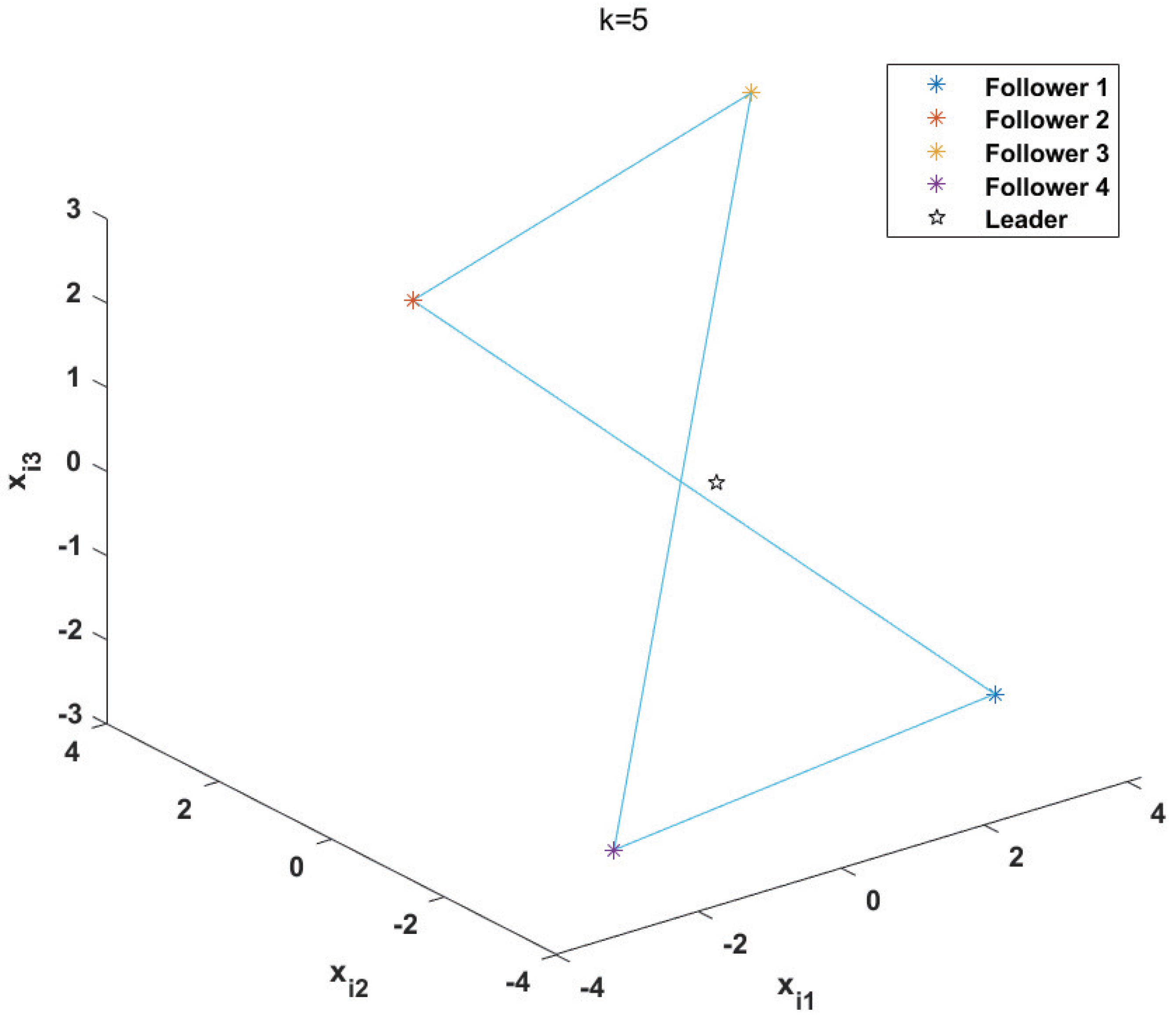
, separately. Obviously, from Figure 2, it can be observed that the state of the error system tends to zero over time, indicating that systems (1) and (2) achieve formation control under the requirements of Theorem 1. Figure 3, Figure 4 and Figure 5 show the moments of updating the control law; it can be seen that as the trigger parameter increases, the number of controller updates becomes fewer, revealing that the larger the threshold value, the fewer the number of updates to the controller. Thus, event-triggered control reduces the update frequency compared to continuous control, which requires real-time monitoring of agent information, saving the resources needed for monitoring and interacting information. Figure 6 demonstrates that the followers eventually stabilize at a fixed position and maintain a constant relative position with the leader, thus achieving formation control. Figure 7, Figure 8, Figure 9 and Figure 10 depict their specific positions in space, showing that the followers stabilize over time, indicating successful formation control.
6. Conclusions
We studied leader-following formation control for discrete-time fractional stochastic multi-agent systems by an event-triggered strategy. First, a new discrete-time fractional stochastic system is modeled, which with stochastic terms can better characterize systems operating under the influence of disturbances and cases of restricted communication. Second, an event-triggered control law is proposed for controlling partial followers, with the aim of making all the agents eventually reach their expected positions and achieve a certain shape of motion. Finally, the theory of Lyapunov’s energy equation is employed to prove that under the impact of disturbance, the formation error eventually tends to zero in the mean square, and formation control can be achieved. However, the formation formed in this way can only achieve translational motion in the end, so the affine formation control with higher maneuverability and flexibility will be studied in the future.
Author Contributions
Writing—original draft, J.W.; Writing—review & editing, J.W., Y.Y. and G.R.; Funding acquisition, G.R. and Y.Y. All authors have read and agreed to the published version of the manuscript.
Funding
This work is funded by the National Natural Science Foundation of China (No. 62173027) and the Talent Fund of Beijing Jiaotong University (Grant No. 2023XKRC009).
Data Availability Statement
The data are available upon request.
Acknowledgments
I am grateful for the valuable comments and observations of the reviewers of this study, which allowed for a substantial improvement of this work.
Conflicts of Interest
The author declares no conflicts of interest.
References
- Olfati, S.R.; Fax, J.A.; Murray, R.M. Consensus and Cooperation in Networked Multi-Agent Systems. Proc. IEEE 2007, 95, 215–233. [Google Scholar] [CrossRef]
- Olfati, S. Flocking for multi-agent dynamic systems: Algorithms and theory. IEEE Trans. Autom. Control 2006, 51, 401–420. [Google Scholar] [CrossRef]
- Wu, B.F.; Peng, Z.X.; Wen, G.G.; Yang, S.C.; Huang, T.W. Sampling-Optimization-Based Adaptive Formation Tracking with Trajectory Protection. IEEE Syst. J. 2023, 17, 6449–6459. [Google Scholar]
- Liu, Y.; Li, Y.M. Application of Inverse Optimal Formation Control for Euler-Lagrange Systems. IEEE Trans. Intell. Transp. Syst. 2023, 24, 5655–5662. [Google Scholar] [CrossRef]
- Huang, F.P.; Duan, M.M.; Su, H.F.; Zhu, S.Y. Distributed Optimal Formation Control of Second-Order Multiagent Systems with Obstacle Avoidance. IEEE Control Syst. Lett. 2023, 7, 2647–2652. [Google Scholar] [CrossRef]
- Zhang, J.X.; Fu, Y.; Fu, J. Adaptive Finite-Time Optimal Formation Control for Second-Order Nonlinear Multiagent Systems. IEEE Trans. Syst. Man Cybern. Syst. 2023, 53, 6132–6144. [Google Scholar] [CrossRef]
- Wu, W.; Tong, S.C. Collision-Free Adaptive Fuzzy Formation Control for Stochastic Nonlinear Multiagent Systems. IEEE Trans. Syst. Man, Cybern. Syst. 2023, 53, 5454–5465. [Google Scholar] [CrossRef]
- Su, H.; Zhang, B.L.; Zhou, J.; Xue, J.; Zheng, Y.S.; Ma, H. Collision-Risk-Based Event-Triggered Optimal Formation Control for Mobile Multiagent Systems Under Incomplete Information Conditions. IEEE Trans. Syst. Man, Cybern. Syst. 2023, 53, 4888–4898. [Google Scholar] [CrossRef]
- Zhao, J.N.; Li, X.M.; Yu, X.; Wang, H.S. Finite-Time Cooperative Control for Bearing-Defined Leader-Following Formation of Multiple Double-Integrators. IEEE Trans. Cybern. 2022, 52, 13363–13372. [Google Scholar] [CrossRef] [PubMed]
- Cheng, W.L.; Zhang, K.; Jiang, B. Fixed-Time Fault-Tolerant Formation Control for a Cooperative Heterogeneous Multiagent System With Prescribed Performance. IEEE Trans. Syst. Man Cybern. Syst. 2023, 53, 462–474. [Google Scholar] [CrossRef]
- Gao, Z.Y.; Zhang, H.J.; Wang, Y.C.; Mu, Y.F. Time-varying output formation-containment control for homogeneous/heterogeneous descriptor fractional-order multi-agent. Inf. Sci. 2021, 567, 146–166. [Google Scholar] [CrossRef]
- Cajo, R.; Guinaldo, M.; Fabregas, E.; Dormido, S.; Plaza, D.; De Keyser, R.; Ionescu, C. Distributed Formation Control for Multiagent Systems Using a Fractional-Order Proportional–Integral Structure. IEEE Trans. Control Syst. Technol. 2021, 29, 2738–2745. [Google Scholar] [CrossRef]
- Liu, L.; Li, P.; Chen, W.; Qin, K.Y.; Qi, L. Distributed formation control of fractional-order multi-agent systems with relative damping and nonuniform time-delays. ISA Trans. 2019, 93, 189–198. [Google Scholar] [CrossRef] [PubMed]
- Cao, Y.C.; Ren, W. Distributed formation control for fractional-order systems: Dynamic interaction and absolute/relative damping. Syst. Control Lett. 2021, 59, 233–240. [Google Scholar] [CrossRef]
- Wang, Y.G.; Zhang, J.; Wu, H.Q. Distributed Adaptive Mittag–Leffler Formation Control for Second-Order Fractional Multi-Agent Systems via Event-Triggered Control Strategy. Fractal Fract. 2022, 6, 380. [Google Scholar] [CrossRef]
- Zamani, H.; Johari Majd, V.; Khandani, K. Formation tracking control of fractional-order multi-agent systems with fixed-time convergence. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2022, 236, 1618–1629. [Google Scholar] [CrossRef]
- Wu, F.; Liu, M.; Feng, Z.Y.; Cao, X.B. Fractional-order sliding mode attitude coordinated control for spacecraft formation flying with unreliable wireless communication. IET Control Theory Appl. 2023, 17, 368–380. [Google Scholar] [CrossRef]
- Meng, X.; Jiang, B.P.; Hamid, R.K.; Gao, C.C. Leader–follower sliding mode formation control of fractional-order multi-agent systems: A dynamic event-triggered mechanism. Neurocomputing 2023, 69, 126691. [Google Scholar] [CrossRef]
- Zamani, H.; Khandani, K.; Majd, V.J. Fixed-time sliding-mode distributed consensus and formation control of disturbed fractional-order multi-agent systems. ISA Trans. 2023, 138, 37–48. [Google Scholar]
- Jun, L.; Li, P.; Qi, L.; Chen, W.; Qin, K.Y. Distributed formation control of double-integrator fractional-order multi-agent systems with relative damping and nonuniform time-delays. J. Frankl. Inst. 2019, 356, 5122–5150. [Google Scholar]
- Gong, Y.F.; Wen, G.G.; Peng, Z.X.; Huang, T.W.; Chen, Y.W. Observer-Based Time-Varying Formation Control of Fractional-Order Multi-Agent Systems With General Linear Dynamics. IEEE Trans. Circuits Syst. II Express Briefs 2020, 67, 82–86. [Google Scholar] [CrossRef]
- Wan, X.B.; Wang, Z.D.; Han, Q.L.; Wu, M. Finite-Time H ∞ State Estimation for Discrete Time-Delayed Genetic Regulatory Networks Under Stochastic Communication Protocols. IEEE Trans. Circuits Syst. I Regul. Pap. 2018, 65, 3481–3491. [Google Scholar] [CrossRef]
- Alsaadi, F.E.; Wang, Z.D.; Wang, D.; Alsaadi, F.E.; Alsaade, F.W. Recursive fusion estimation for stochastic discrete time-varying complex networks under stochastic communication protocol: The state-saturated case. Inf. Fusion 2020, 60, 11–19. [Google Scholar] [CrossRef]
- Wang, M.; Wang, Z.D.; Chen, Y.; Sheng, W.G. Event-based adaptive neural tracking control for discrete-time stochastic nonlinear systems: A triggering threshold compensation strategy. IEEE Trans. Neural Netw. Learn. Syst. 2019, 31, 1968–1981. [Google Scholar] [CrossRef]
- Hu, Z.P.; Shi, P.; Zhang, J.; Deng, F.Q. Control of discrete-time stochastic systems with packet loss by event-triggered approach. IEEE Trans. Syst. Man Cybern. Syst. 2018, 51, 755–764. [Google Scholar] [CrossRef]
- Li, B.; Wang, Z.D.; Ma, L.F. An event-triggered pinning control approach to synchronization of discrete-time stochastic complex dynamical networks. IEEE Trans. Neural Netw. Learn. Syst. 2018, 29, 5812–5822. [Google Scholar] [CrossRef]
- Ding, D.R.; Wang, Z.D.; Shen, B.; Wei, G.L. Event-triggered consensus control for discrete-time stochastic multi-agent systems: The input-to-state stability in probability. Automatica 2015, 62, 284–291. [Google Scholar] [CrossRef]
- Lin, P.; Jia, Y.M. Consensus of second-order discrete-time multi-agent systems with nonuniform time-delays and dynamically changing topologies. Automatica 2009, 45, 2154–2158. [Google Scholar] [CrossRef]
- Gao, Y.P.; Ma, J.W.; Zuo, M.; Jiang, T.Q.; Du, J.P. EConsensus of discrete-time second-order agents with time-varying topology and time-varying delays. J. Frankl. Inst. 2012, 349, 2598–2608. [Google Scholar] [CrossRef]
- Xu, X.L.; Chen, S.Y.; Huang, W.; Gao, L.X. Leader-following consensus of discrete-time multi-agent systems with observer-based protocols. Neurocomputing 2013, 118, 334–341. [Google Scholar] [CrossRef]
- Liu, Z.X.; Li, Y.B.; Wang, F.Y.; Chen, Z.Q. Reduced-order observer-based leader-following formation control for discrete-time linear multi-agent systems. IEEE/CAA J. Autom. Sin. 2020, 8, 1715–1723. [Google Scholar] [CrossRef]
- Ren, G.J.; Yu, Y.G.; Wei, J.M.; Xu, C.H. Pinning event-triggered control for stochastic discrete-time complex networks with time-varying delay. IET Control Theory Appl. 2019, 13, 2207–2216. [Google Scholar] [CrossRef]
- Yuan, X.L.; Ren, G.J.; Yu, Y.G.; Sun, W.J. Mean-square pinning control of fractional stochastic discrete-time complex networks. J. Frankl. Inst. 2022, 359, 2663–2680. [Google Scholar] [CrossRef]
- Yang, D.S.; Yu, Y.G.; Hu, W.; Yuan, X.L.; Ren, G.J. Mean Square Asymptotic Stability of Discrete-Time Fractional Order Stochastic Neural Networks with Multiple Time-Varying Delays. Neural Process. Lett. 2023, 55, 9247–9268. [Google Scholar] [CrossRef]
- Yang, H.Y.; Zhang, H.; Wang, Z.P.; Yan, H.C. Reliable leader-following consensus of discrete-time semi-markovian jump multi-agent systems. IEEE Trans. Netw. Sci. Eng. 2023, 10, 3505–3518. [Google Scholar] [CrossRef]
- Zhang, R.H.; Zhang, Y.Y.; Zong, X.F. Stochastic leader-following consensus of discrete-time nonlinear multi-agent systems with multiplicative noises. J. Frankl. Inst. 2022, 359, 7753–7774. [Google Scholar] [CrossRef]
- Podlubny, I. Fractional Differential Equations: An Introduction to Fractional Derivatives, Fractional Differential Equations, to Methods of Their Solution and Some of Their Applications; Elsevier: Amsterdam, The Netherlands, 1998; pp. 22–26. [Google Scholar]
- Li, T.; Zhang, J.F. Consensus conditions of multi-agent systems with time-varying topologies and stochastic communication noises. IEEE Trans. Autom. Control 2010, 55, 2043–2057. [Google Scholar] [CrossRef]
- Li, Z.; Zhang, W.B.; Fang, J.A.; He, G. Synchronisation of discrete-time complex networks with delayed heterogeneous impulses. IET Control Theory Appl. 2015, 9, 2648–2656. [Google Scholar] [CrossRef]
- Liu, P.; Kong, M.X.; Zeng, Z.G. Projective Synchronization Analysis of Fractional-Order Neural Networks With Mixed Time Delays. IEEE Trans. Cybern. 2022, 52, 6798–6808. [Google Scholar] [CrossRef]
- Si, L.Z.; Xiao, M.; Jiang, G.P.; Cheng, Z.S.; Song, Q.K.; Cao, J.D. Dynamics of Fractional-Order Neural Networks With Discrete and Distributed Delays. IEEE Access 2020, 8, 46071–46080. [Google Scholar] [CrossRef]
- Lv, S.S.; Pan, M.; Li, X.G.; Cai, W.Y.; Lan, T.Y.; Li, B.Q. Consensus Control of Fractional-Order Multi-Agent Systems With Time Delays via Fractional-Order Iterative Learning Control. IEEE Access 2019, 7, 159731–159742. [Google Scholar] [CrossRef]
- Liu, J.; Yang, G.B.; Zhou, N.; Qin, K.Y.; Chen, B.D.; Wu, Y.H.; Choi, K.S. Event-triggered consensus control based on maximum correntropy criterion for discrete-time multi-agent systems. Neurocomputing 2023, 545, 126323. [Google Scholar] [CrossRef]
- Zhuang, J.W.; Peng, S.G.; Wang, Y.H. Exponential consensus of stochastic discrete multi-agent systems under DoS attacks via periodically intermittent control: An impulsive framework. Appl. Math. Comput. 2022, 433, 127389. [Google Scholar] [CrossRef]
Figure 1.
Communication graph of multi-agent system.

Figure 2.
Estimation error trajectories of agents over time.

Figure 3.
Update times of event-trigger controllers for
.

Figure 4.
Update times of event-trigger controllers for
.

Figure 5.
Update times of event-trigger controllers for
.

Figure 6.
The state trajectories of followers and leader.

Figure 7.
Position trajectories at
.

Figure 8.
Position trajectories at
.

Figure 9.
Position trajectories at
.

Figure 10.
Position trajectories at
.

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Wu, J.; Yu, Y.; Ren, G. Leader-Following Formation Control for Discrete-Time Fractional Stochastic Multi-Agent Systems by Event-Triggered Strategy. Fractal Fract. 2024, 8, 246. https://doi.org/10.3390/fractalfract8050246
AMA Style
Wu J, Yu Y, Ren G. Leader-Following Formation Control for Discrete-Time Fractional Stochastic Multi-Agent Systems by Event-Triggered Strategy. Fractal and Fractional. 2024; 8(5):246. https://doi.org/10.3390/fractalfract8050246
Chicago/Turabian StyleWu, Jiawei, Yongguang Yu, and Guojian Ren. 2024. "Leader-Following Formation Control for Discrete-Time Fractional Stochastic Multi-Agent Systems by Event-Triggered Strategy" Fractal and Fractional 8, no. 5: 246. https://doi.org/10.3390/fractalfract8050246