1. Introduction
For many engineering applications, it is sufficient to use the concept of simple materials [
1] that includes only first gradients of the kinematical variables. However, in various fields, modern continuum mechanics is also driven by applications that include higher gradients [
2]. This is particularly true for materials with a micro-structure, functionally graded materials, and metamaterials [
3,
4,
5,
6,
7,
8]. Furthermore, finite gradient plasticity [
9,
10] and theories for gradient fluids [
11,
12,
13] became blossoming fields of research in the last few decades. Because of the broad range of research in this field, the list of references is restricted to recent publications. For this reason, the latter is far from being complete. The author therefore apologizes to any colleague not mentioned in spite of their important contributions to academic and/or applied research on gradient materials.
The same holds for theories that have been developed for vibrational problems and wave propagation. However, common for many of these theories is the assumption of an underlying micro-structure characterized by a micro-displacement, as proposed for linear elastic continua by Mindlin [
14]. Nowadays, such a continuum theory has been applied to model anti-plane surface waves in an elastic half-space [
15]. Also, one-dimensional gradient elasticity models have been derived from a discrete microstructure using continualization methods [
16]. The static and dynamic responses of these models have been analyzed in [
17].
A comprehensive overview of formulations of gradient elasticity is given in [
18]. In this reference, so-called dynamically consistent models based on at least two length scale parameters are discussed. In particular, it is shown that one scalar length scale parameter in combination with strain gradients is relevant for statics, while a second one can, in combination with acceleration gradients, be added for use in dynamics. A purely strain gradient approach that has been applied for longitudinal vibration analysis of microbars using three different length scale parameters has been proposed in [
19].
Analytical solutions for thermal vibrations of strain gradient beams considering one internal length scale parameter for the strain gradient have been reported in [
20]. Furthermore, optimal vibration control of gradient materials based on a dynamically consistent approach with two length scale parameters has been studied in [
21].
However, even if sophisticated and thermodynamically consistent material models can be established, there are still no standard experiments to determine length scale parameter or higher order material constants [
22]. To solve this problem, it is possible to apply atomistic simulation approaches [
23]. An alternative approach is the application of system identification approaches that have been established in the theory of mechanical vibrations. For simple materials, system identification based on resonance measurements has been proposed [
24,
25]. Recently, an inverse identification approach based on results of impulse response measurements was proposed in [
26].
It is obvious that especially for linear time-invariant (LTI) systems that are composed of structures described by material models considering higher gradients of the kinematical variables, the question of system identification needs further discussion. Contributing to this discussion is the motivation for the present paper. In order to avoid restrictions, the presented approach is embedded in a thermodynamically consistent continuum theory of second-order gradient materials [
2] without further specification of internal micro-structures or length scales that are linked to specific strain or acceleration gradients. This allows for a consistent formulation of the governing equations of LTI systems using longitudinal vibrations in finite one-dimensional wave guides as an illustrative example. Such systems can be identified by adaptive filtering considering self-adaptive identification schemas based on the least mean square (LMS) algorithm [
27]. To the best knowledge of the author, this paper reports on the application of adaptive filtering for system identification considering second-order gradient materials for the first time.
The introduction of the well-established concept of adaptive filtering to gradient elasticity enables the development of novel and comparable identification approaches based on input–output relations, such as impulse response functions (IRF) or frequency response functions (FRF), that are independent of knowledge about an underlying micro-structure. This is the key motivation for the investigation presented in this paper. Thus, the combination of gradient elasticity and adaptive filtering can been seen as a new contribution to the academic discussion.
However, it is also possible to motivate practical applications, one of which can be connected with computational material design. If it is possible to derive input–output relations for LTI systems with gradient material properties (that do not yet exist) using numerical models, it is possible to include the identified input–output relations into conventional simulation models before manufacturing real world materials. This enables performance evaluations on the material, compound, structural, and/or system level, before dealing with time-consuming and cost-intensive manufacturing problems. Another application can be considered if structural health monitoring is taken into account. In a situation in which the measured real-world IRF (or FRF) of the system that is monitored differs from the nominal one, the change could be used as an indicator for the development of an internal microstructure. If, furthermore, such a change is compared to the change in the input–output relation of an associated virtual twin that includes gradient material effects, it could also be possible to localize the position of the structural change. This could be carried out using a model update procedure based on minimizing the difference between the measured and the simulated input–output relations.
This paper is structured as follows: All aspects of material modeling, necessary to describe and investigate longitudinal vibrations of finite one-dimensional wave guides considering both simple materials and second-order gradient materials, are described in
Section 2. The associated numerical models as well as the principle of adaptive filtering applied in this paper are presented in
Section 3, while the results of numerical simulations and discussion of the dynamical behavior are presented in
Section 4. The main findings are summarized in the conclusion in
Section 5.
4. Results of Numerical Simulations and Discussion of Dynamic Behavior
The numerical models that were derived in the previous section can be used to analyze and identify the dynamics of simple materials and second-order gradient materials considering longitudinal vibrations in time domain as well as in frequency domain. Because system identification based on the NLMS is organized in time domain, the discussion focusses on the results of discrete time simulations. In the upcoming section, the system response is discussed considering input signals such as (i) the unit impulse, (ii) time-harmonic excitation, and (iii) band-limited noise.
The parameter that were used in all of the simulations are summarized in
Table 1. The remaining settings for the damping constant
, the length of the adaptive filter
, and the excitation frequency range are specified in the associated subsections. Considering simple materials, it should be noted that the convergence condition defined by Courant, Friedrichs, and Lewy, see [
33], holds for the chosen set of simulation parameters, because
. For every simulation, the input signal is prescribed at
, while the system output is determined at the 29th grid point.
4.1. Impule Response of Simple Materials and Second-Order Gradient Materials
In the first step the response to a unit impulse input at the position
has been analyzed considering boundary conditions such as
In addition to the boundary condition listed in Equation (21), the damping parameter has been set to
. The results of these simulations are shown in
Figure 2 and
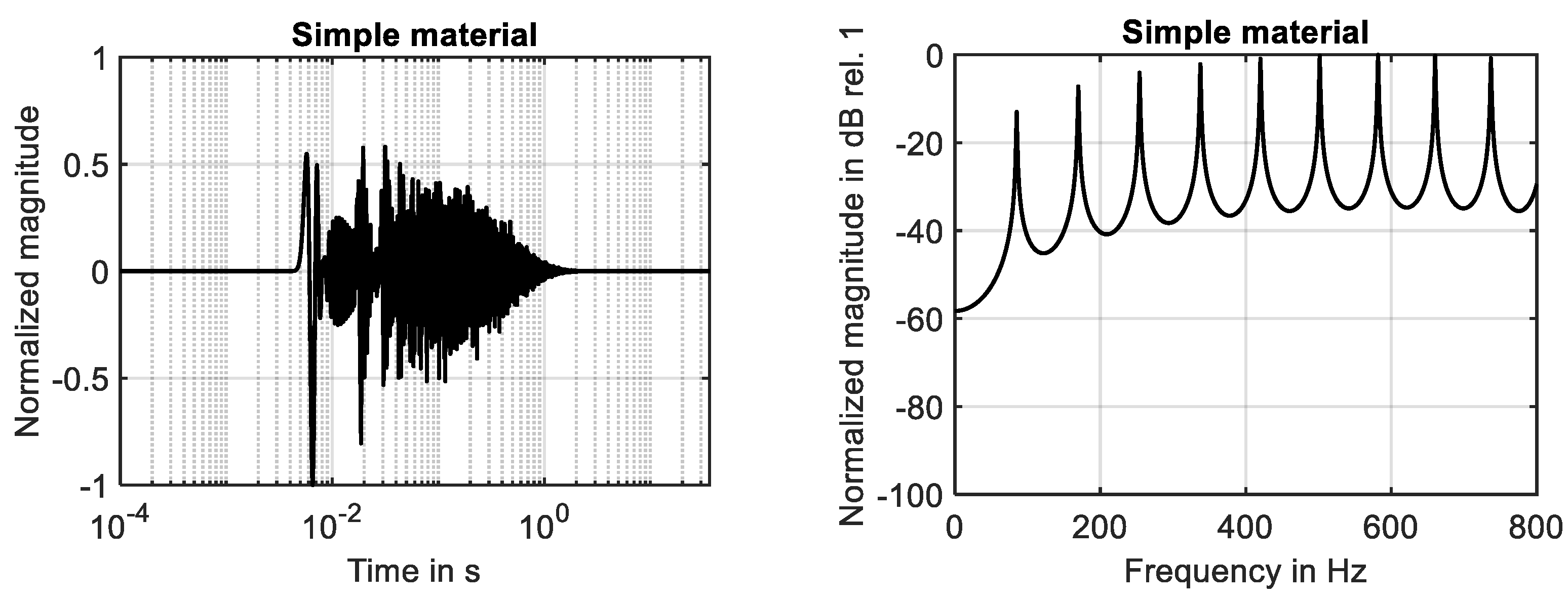
Figure 3 for both time domain and frequency domain. Please note that the curves are normalized to the maximum of the absolute values of the dependent variable.
For both materials, the impulse response decreases rapidly and shows the typical behavior of linear systems with viscous damping. To recognize the differences, it is necessary to compare the frequency response curves shown in
Figure 2 (right) and
Figure 3 (right). For the simple material, in total, nine resonances can be detected below 800 Hz. As known from the classical theory, these resonances are equally spaced. The results are in full agreement with Equation (10), if higher gradient effects are neglected, i.e.,
.
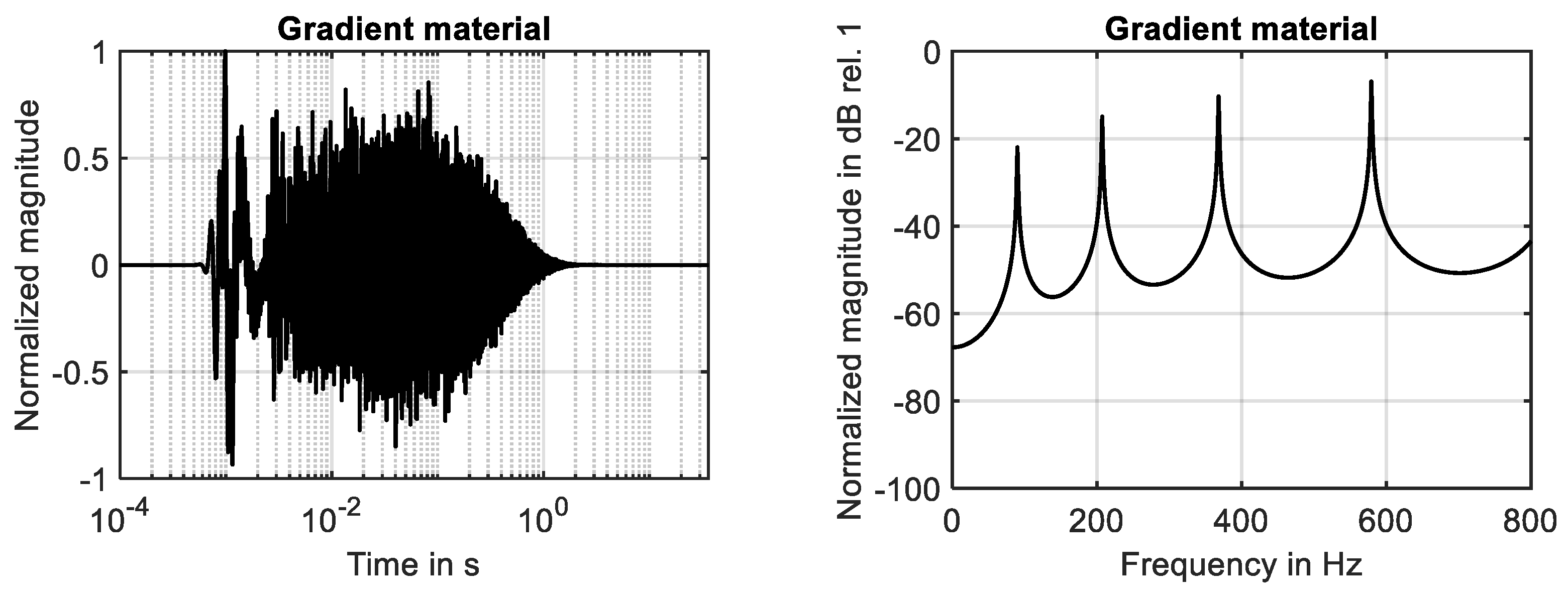
As shown in
Figure 3 (right), the number of resonances is reduced down to four if the second-order gradient material is analyzed. The spacing between the resonances increases with an increase in mode number. Furthermore, modes with the same mode number occur at higher frequencies compared to the simple material. Thus, the results of the numerical simulations confirm the analytical solution given in Equation (10), see
Table 2. Furthermore, it has been found that the relative error between the analytical and numerical results is limited by −1.2% using the discretization in time and space specified in
Table 1.
To verify the numerical implementation, the influence of the time step on the relative error was also analyzed. The same applies for the effect of the spatial discretization on the relative error. The associated results are presented in
Appendix B. It has been found that the relative error is still limited by −1.2% using sampling frequencies of 42.5 kHz and 170 kHz, if the spatial discretization is not changed, see
Table A1 and
Table A2. It has also been found that the relative error can increase up to 4.7% if the spatial discretization is reduced down to 16 grid points, considering a sampling rate of 85 kHz. However, using 46 grid points, it has also been confirmed that the maximum relative error is reduced down to −1.2% if the spatial discretization is increased, see
Table A3 and
Table A4. The computational load is also influenced by the fineness of the time step and the fineness of the spatial discretization. Using an ordinary personal computer, the lowest CPU time (102 s) was determined for the simulation of the simple material using as sampling frequency of 42.5 kHz and a spatial discretization of 16 grid points. The highest CPU time (130 s) was detected during the simulation of the gradient material considering a sampling frequency of 170.0 kHz and 46 grid points.
4.2. Time-Harmonic Excitation
In the second step, adaptive filtering was applied considering time-harmonic excitation with an excitation frequency of
at
and a damping parameter of
. The associated boundary conditions are summarized in Equation (22)
Because adaptive filtering has been performed using a harmonic signal, it has been sufficient to restrict the filter length to . The minimum power of the reference signal has been set to , and has been used as the normalized step size.
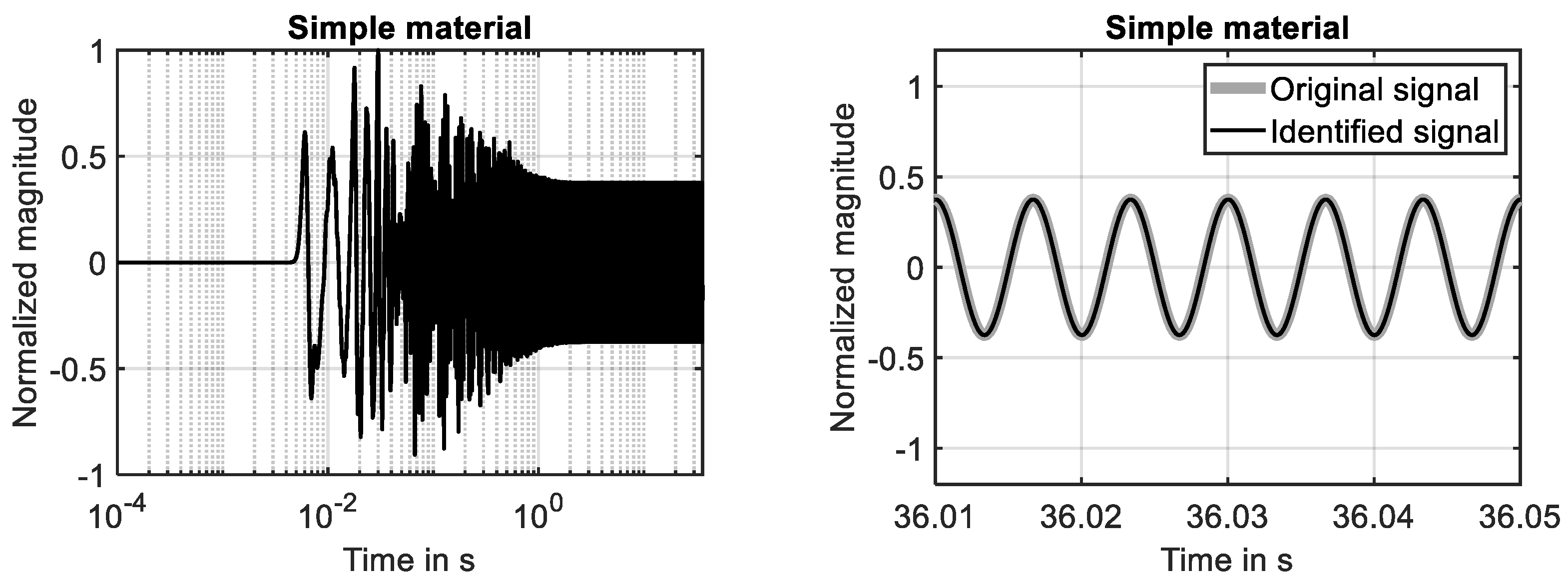
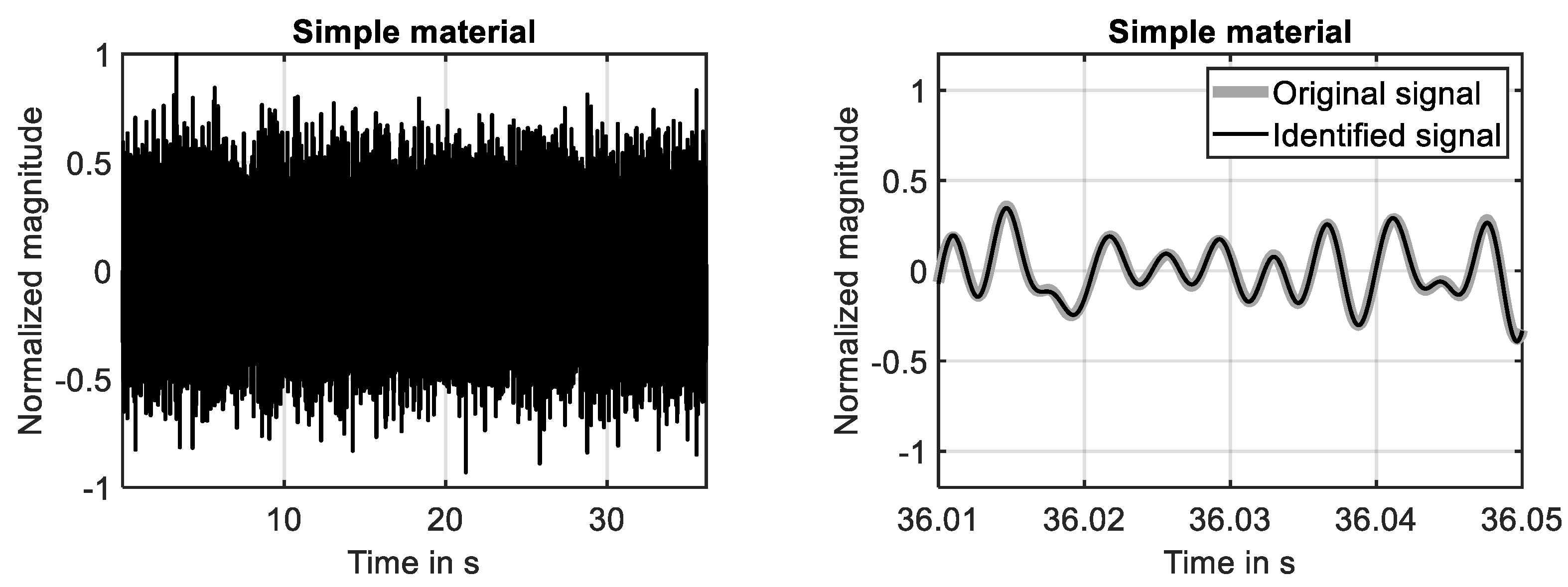
The time-harmonic response of the simple material is shown in
Figure 4 (left) for the first ten seconds of the simulation. The steady-state response is fully developed during the first two seconds. This finding is in agreement with the decay of the associated impulse response, see
Figure 2 (left). The results shown in
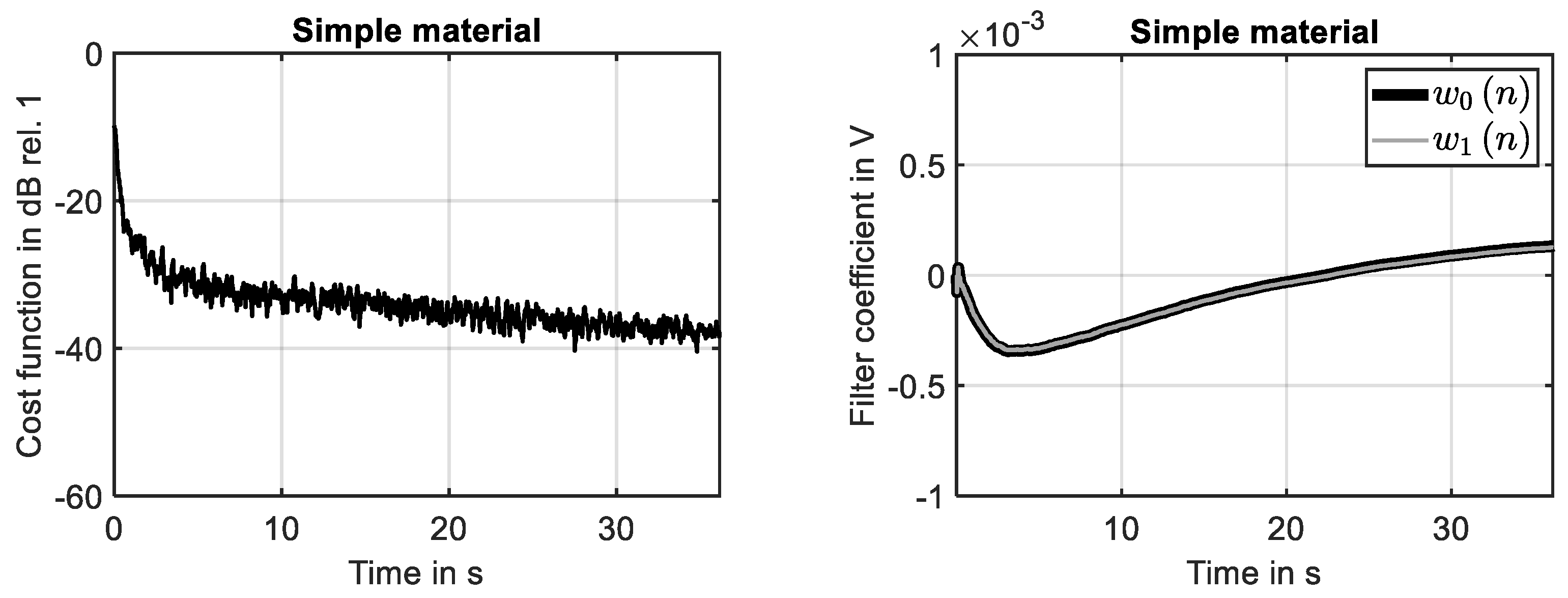
Figure 4 (right) clarify that the system response determined at the 29th grid point is fully identified by the adaptive filter. The adaption process is illustrated by
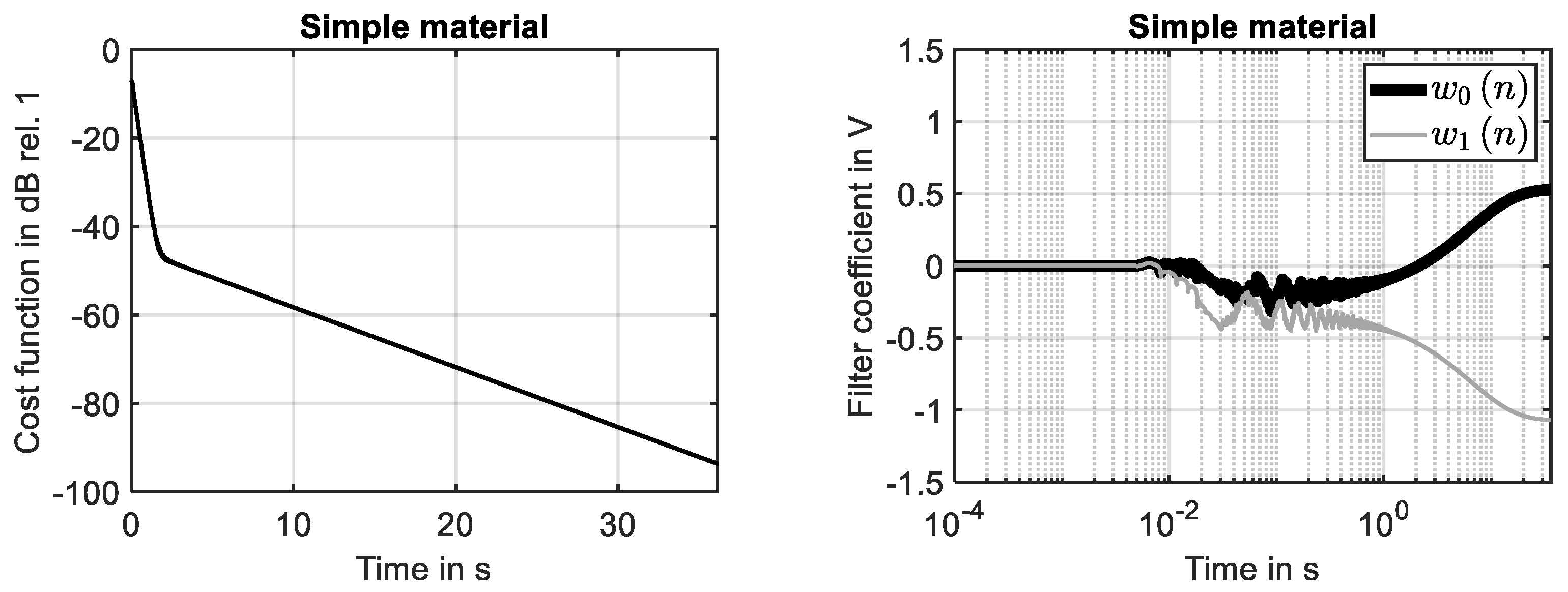
Figure 5. While the reduction in the cost function (learning curve) is shown in
Figure 5 (left), the development of the two filter coefficients is presented in
Figure 5 (right). It can been seen that using the NLMS, a rapid convergence of the filter weights has been achieved.
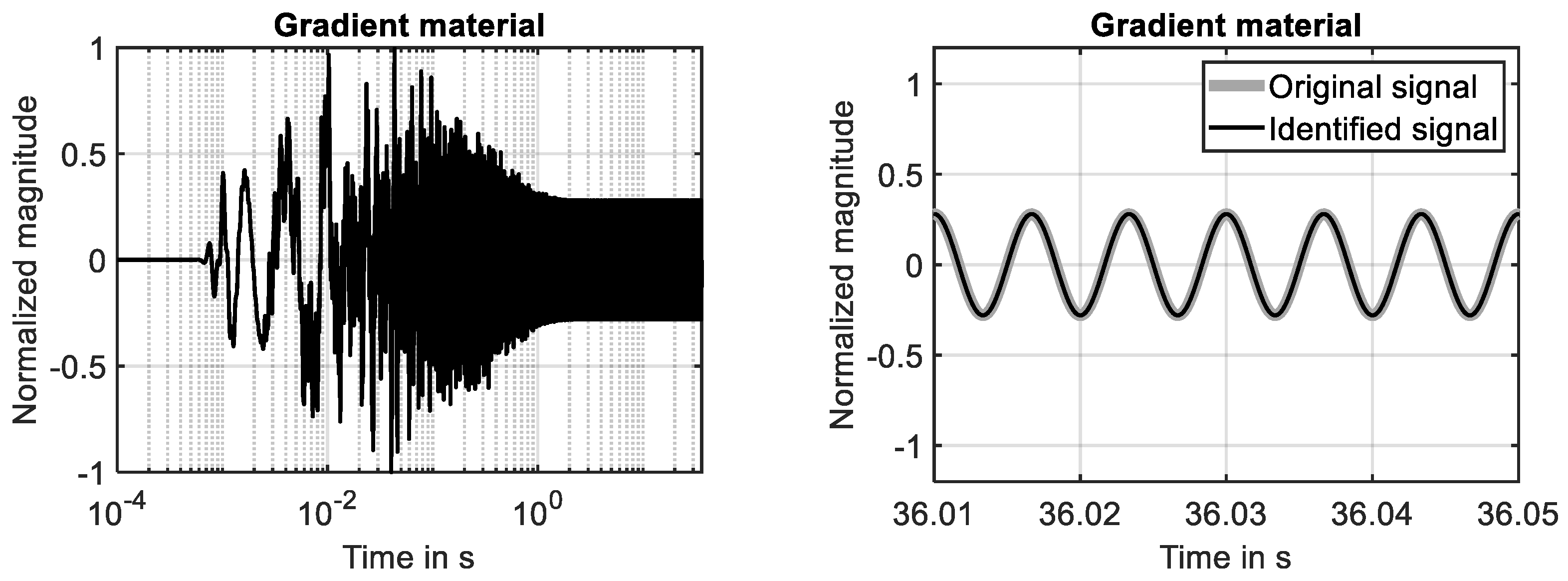
The time-harmonic response of the second-order gradient material is presented in
Figure 6 (left), considering again the first ten seconds of the simulation. Also, for this material, the steady-state response is fully developed after the first two seconds. This finding is in agreement with the decay of the associated impulse response. The latter is shown in
Figure 3 (left).
The results shown in
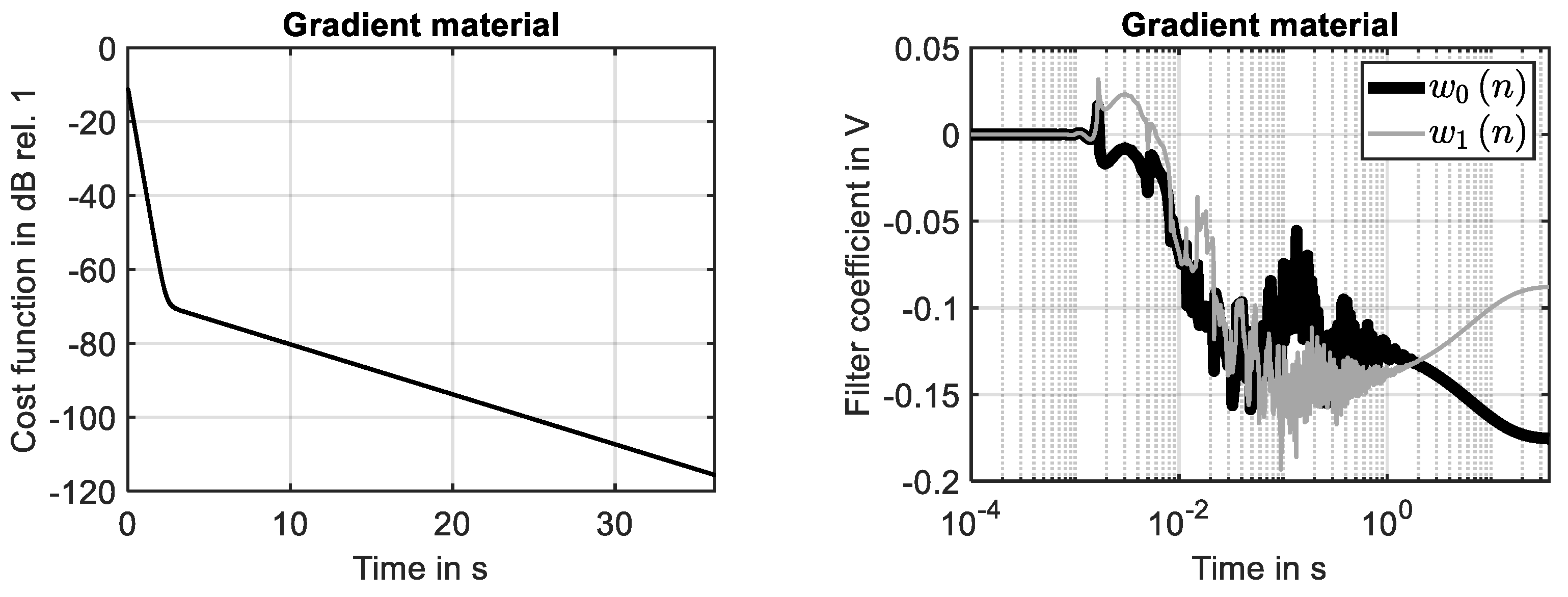
Figure 6 (right) prove that the system response determined for the second-order gradient material at the 29th grid point is identified by the adaptive filter with high accuracy. The adaption process is illustrated by
Figure 6. The reduction in the cost function, shown in
Figure 7 (left), is similar to the learning curve of the simple material, see
Figure 5 (left).
The development of the two filter coefficients is presented in
Figure 7 (right). As for the simple material, see
Figure 5 (right), a fully converged filter is achieved at the end of the simulation. This clarifies that the NLMS algorithm can be applied to identify the time-harmonic response of LTI systems that include higher gradient effects with the same accuracy known for LTI systems based on simple materials.
Please note that it was necessary to increase the filter length or to adjust the normalized step size of the self-adaptive algorithm. The same applies for the minimum reference signal power
and the normalized step size
. This implies that the same set of parameters that defines the process of adaptive filtering can be used to monitor changes in the material behavior. Because of the differences in the evolution of filter weights, see
Figure 5 (right) and
Figure 7 (right), it is possible to monitor a change in the material behavior that can be caused by the relevance of higher gradients.
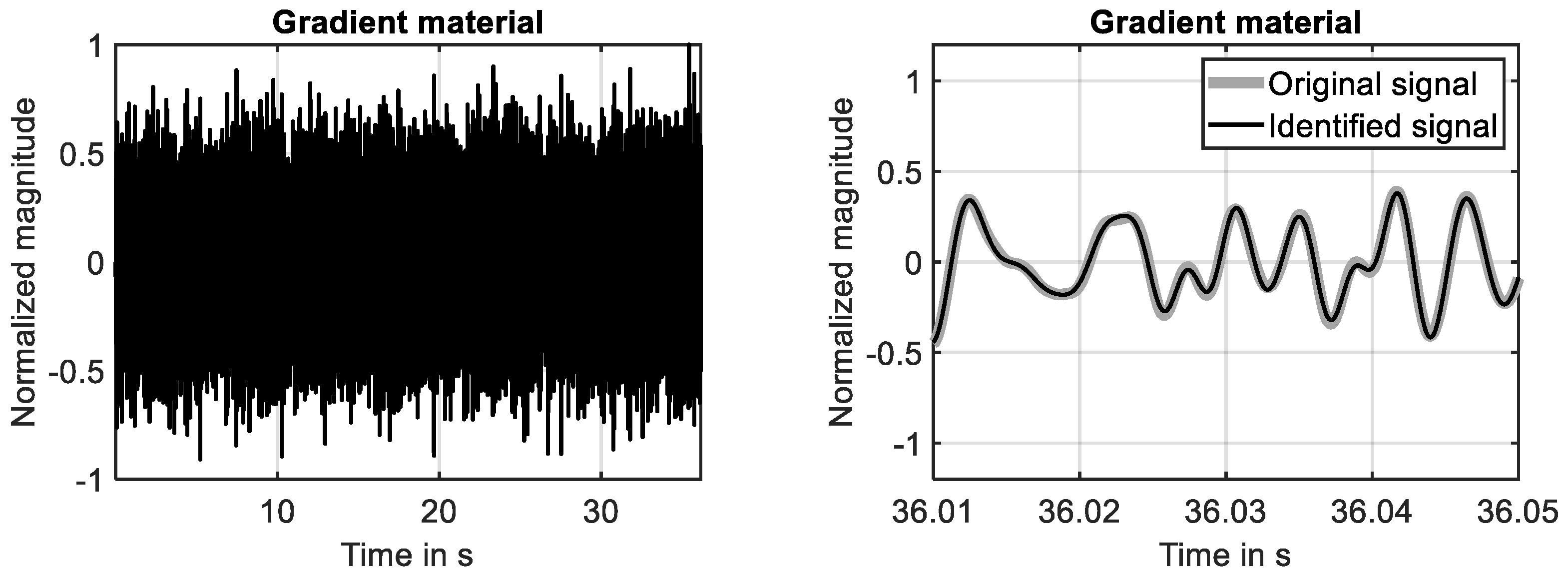
4.3. Band-Limited Noise
In the third step, adaptive filtering was applied considering band-limited Gaussian noise in the frequency range
. This reference signal was used to excite the system at the position
. The damping parameter was increased significantly to
. The boundary conditions used in this third step are summarized in Equation (23)
where
represents the random excitation signal. The length of the adaptive filter was also increased. It was set to
. The minimum power of the reference signal and the normalized step size were not altered. Thus, the minimum power was again set to
, and
was again used as the normalized step size.
For the simple material, the time domain response simulated in the first ten seconds is shown in
Figure 8 (left), while the converged state at the end of the simulation is shown in
Figure 8 (right). The presented results prove that the system response is identified by high accuracy in the investigated frequency range. This finding is also supported by the learning curve shown
Figure 9 (left), because the squared error is reduced down to −40 dB at the end of the simulation. The development of the first two filter weights is shown in
Figure 9 (right). It can be seen that these filter weights strive against constant values at the end of the simulation.
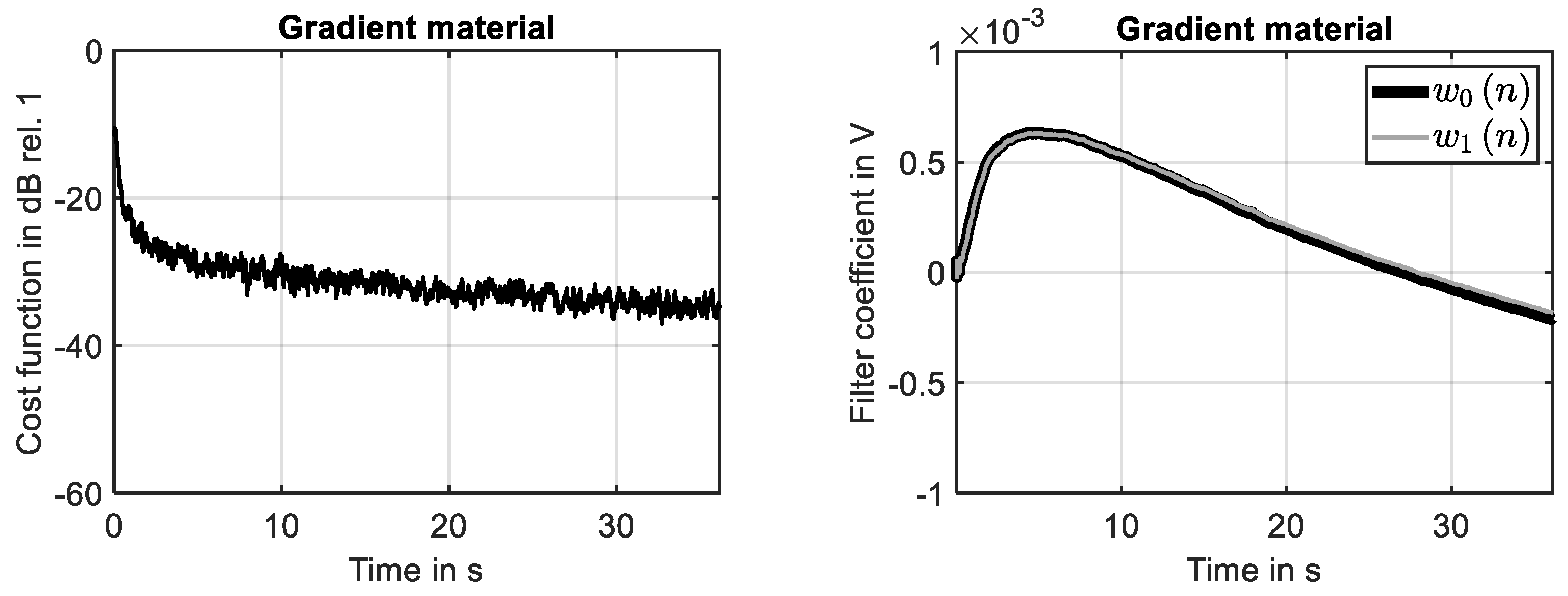
The time domain response of the second-order gradient material simulated in the first ten seconds is shown in
Figure 10 (left). As for the simple material, the system is identified with high accuracy at the end of the simulation, see
Figure 10 (right). This finding is again supported by the learning curve shown
Figure 11 (left), because the squared error is reduced down to −45 dB at the end of the simulation. The development of the first two filter weights is shown in
Figure 11 (right). It can be seen that nearly constant values are reached at the end of the simulation.
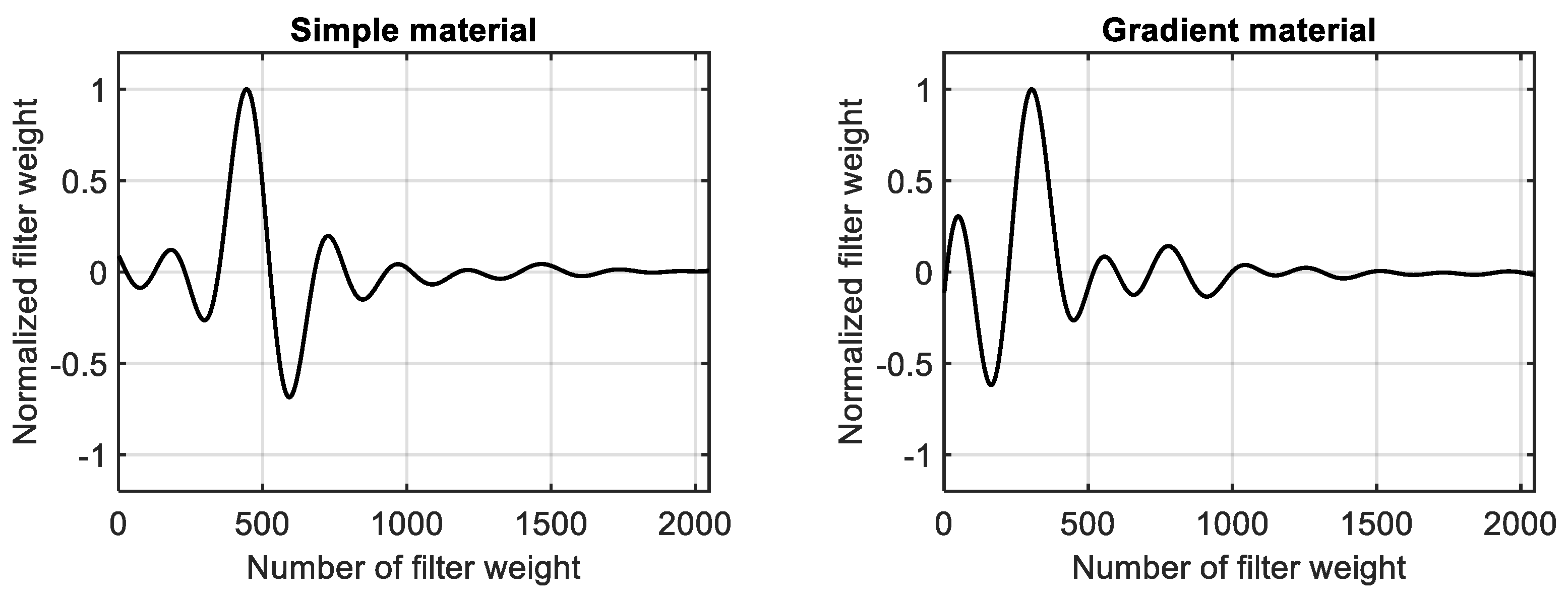
In a converged state, the coefficients of the adaptive filter represent the impulse response of the investigated system in the investigated frequency range. Using a normalization to the maximum of the absolute values, the converged filter coefficients of the simple material are presented in
Figure 12 (left). The converged and normalized filter weights that have been identified for the second-order gradient materials are shown in
Figure 12 (right). For both materials, a stable impulse response has been identified in the investigated frequency range. Please note that both impulse response curves tend to zero with an increasing filter weight number because viscous damping has been taken into account.
Because different systems based on different material models have been identified, the impulse response curves shown in
Figure 12 are not identical. However, as for the time-harmonic signal, the parameters of the adaptive schema have been changed. This opens the possibility of using monitoring techniques such as online plant modeling [
34] to observe changes in the system behavior that could be caused by an increase in the relevance of higher gradients in the material behavior. For a practical approach to system identification and condition monitoring, it is possible to formulate the following statements as the main findings of the numerical investigations presented in
Section 4:
Statement 1: If the investigated system behaves in a linear and time-invariant way and is fully observable, the influence of higher gradients of the kinematic variables can be relevant for the development of system models, if the number of resonances in a certain frequency band is reduced and the spacing between single resonances increases with an increase in frequency.
Statement 2: If the investigated system behaves in a linear and time-invariant way and is fully observable, a change in the convergence characteristics of the adaptive filter weights that is not caused by changing the parameter of the adaptive schema can indicate a change in the material behavior that can be caused by an increasing relevance of higher-order gradients of the kinematic variables.
Statement 3: If the investigated system behaves in a linear and time-invariant way and is fully observable, a change in the impulse response (that might be observed in condition monitoring during online plant modeling) that is not caused by changing the parameter of the adaptive schema can indicate a change in the material behavior that can be caused by an increasing relevance of higher-order gradients of the kinematic variables.
5. Conclusions
For the first time, system identification based on self-adaptive filtering has been applied to second-order gradient materials using numerical models. These models have been derived from thermodynamically consistent material models that are embedded into a general three-dimensional framework for gradient materials. For this reason, it has not been necessary to consider parameters such as internal length scales that can be used to link the material behavior to a specific internal micro structure. Because of the thermodynamically consistent approach, it has been possible to compare all of the results with the behavior of simple materials.
To obtain simple numerical models, the FDM has been applied. System identification has been performed using the NLMS algorithm. All investigations have been restricted to vibrations in longitudinal finite wave guides. It has been found that in contrast to the classical theory of simple materials, these kind of vibrations are described by a fourth-order PDE. In agreement with the state-of-the-art, it has also been found that such a PDE can be solved analytically for a specific set of boundary conditions. The resulting solution allows for calculating natural frequencies that can differ significantly from the solution known for a simple material.
In particular, it has been found that the influence of second-order gradients of the kinematic variables results in higher values for the natural frequencies and a spacing of natural frequencies that is not equidistant in frequency. The deviation in the natural frequencies increases with an increase in frequency. It starts with a deviation of 6% at the first natural frequency and reaches a deviation of 72.5% at the fourth natural frequency. To observe such a characteristic in a frequency response curve can be relevant for the development of adequate continuum mechanical models. However, all simulations have been validated successfully considering an analytical solution. It has been found that the relative error was reduced down to 0.0% at the first natural frequency using 46 grid points and a sampling frequency of 170 kHz. This holds for both the simple material and the gradient material. It has also been found that the relative error increases if the spatial discretization is reduced. Furthermore, the effect of spatial discretization on the results is more important, compared to the influence of the sampling frequency. Nevertheless, for the lowest spatial discretization (using 16 grid points) in combination with the lowest sampling frequency (42.5 kHz), the absolute value of the relative error did not exceed 4.7% at the fourth natural frequency, considering gradient material behaviour.
The results of the numerical investigation in combination with the adaptive filtering applied for system identification prove that this technique can also be successfully applied to gradient materials. However, compared to simple materials, differences have been found, especially in the evolution of the filter weights. These differences could be used for applications in the field of condition monitoring.
According to the author, future work in this field should include experimental data observed in physical experiments. Furthermore, the field is open to derive more mathematical models that can be used to describe more sophisticated wave propagation phenomena (such as shear waves or bending waves) as well as to develop more advanced numerical models in order to guarantee stable integration schemas. Taking progress in these research directions into account, self-adaptive filtering can become an interesting alternative to other identification methods, especially for dynamical problems. It should also be noticed that the present contribution is limited to small strains and LTI-systems at low frequencies. Thus, the introduction of non-linear effects as well as the discussion of high-frequency effects are open topics for further investigation. Furthermore, only the second gradients of the kinematic variables have been taken into account. For this reason, the introduction of higher gradient terms can also be considered in future investigations.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}











