

Bionic Design and Manufacturing of Innovative Aircraft
A special issue of Applied Sciences (ISSN 2076-3417). This special issue belongs to the section "Aerospace Science and Engineering".
Deadline for manuscript submissions: closed (30 December 2022) | Viewed by 18998
Special Issue Editors

Interests: bionic aircraft; bionic propulsion; biomimetic flow control

Interests: intelligent robots; motion bionics and mechanics; mechatronics tech
Special Issues, Collections and Topics in MDPI journals

Interests: bioinspried robot; unmmaned intelligent system; wave energy technology

Interests: aerodynamics and flight dynamics; aeroelasticity; computational fluid dynamics and AI technologies in aerospace engineering
Special Issue Information
Dear Colleagues,
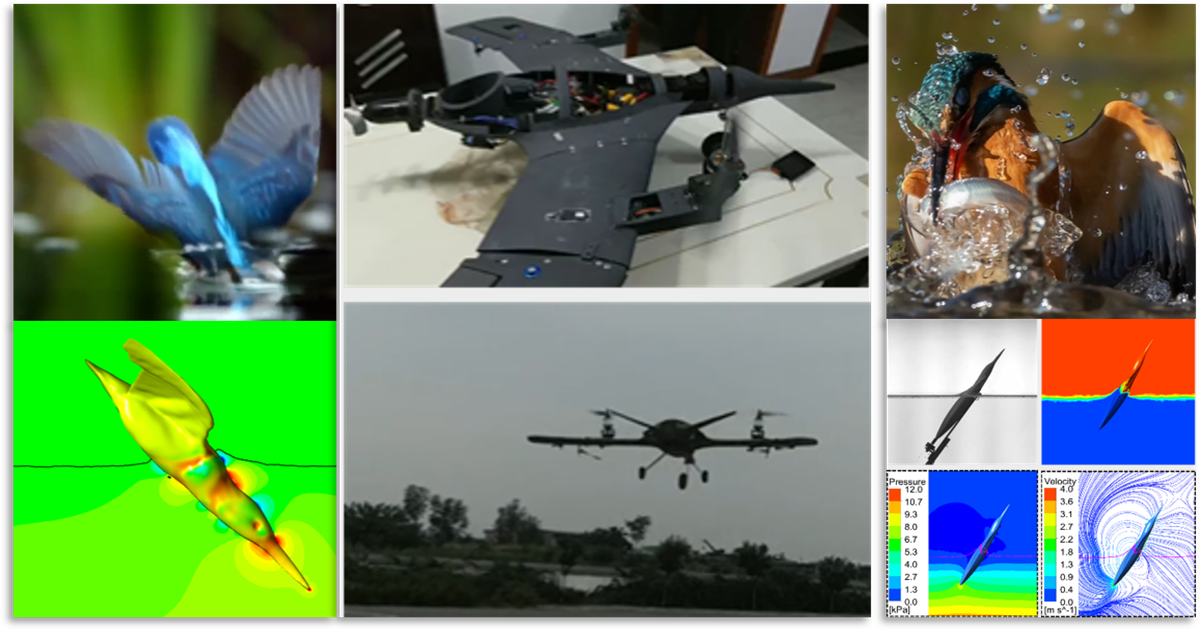
Bionics is the source and motivation for the innovation and development of aircraft. Creatures in nature provide important design ideas for the technological innovation of aircraft. They not only solve major problems of aircraft design but also give birth to many new concept aircrafts.
This Special Issue will publish submissions related to research on the design and manufacturing of bionic aircraft that imitate the flight modes and morphological characteristics of natural creatures, bionic technology to improve the aerodynamic performance of aircraft, bionic design of new concept propellers, and bionic design and manufacturing of new materials and structures of aircraft.
Prof. Dr. Chengchun Zhang
Prof. Dr. Aihong Ji
Prof. Dr. Zirong Luo
Prof. Dr. Gang Chen
Guest Editors
Manuscript Submission Information
Manuscripts should be submitted online at www.mdpi.com by registering and logging in to this website. Once you are registered, click here to go to the submission form. Manuscripts can be submitted until the deadline. All submissions that pass pre-check are peer-reviewed. Accepted papers will be published continuously in the journal (as soon as accepted) and will be listed together on the special issue website. Research articles, review articles as well as short communications are invited. For planned papers, a title and short abstract (about 100 words) can be sent to the Editorial Office for announcement on this website.
Submitted manuscripts should not have been published previously, nor be under consideration for publication elsewhere (except conference proceedings papers). All manuscripts are thoroughly refereed through a single-blind peer-review process. A guide for authors and other relevant information for submission of manuscripts is available on the Instructions for Authors page. Applied Sciences is an international peer-reviewed open access semimonthly journal published by MDPI.
Please visit the Instructions for Authors page before submitting a manuscript. The Article Processing Charge (APC) for publication in this open access journal is 2400 CHF (Swiss Francs). Submitted papers should be well formatted and use good English. Authors may use MDPI's English editing service prior to publication or during author revisions.
Keywords
- bionic aircraft design
- bionic materials and structures
- bionic propulsion
- bionic flow control
- bionic intelligent control