
X-ray Pulsar Signal Denoising Based on Variational Mode Decomposition

Abstract
:1. Introduction
2. Preliminaries
Variational Mode Decomposition
- Initialization: ;
- ;
- Use and update , ;
- Stop the iteration until for a chosen criterion , otherwise return to step 2.
3. VMD-Based Denoising Design for X-ray Pulsar Signals
3.1. X-ray Pulsar Profile
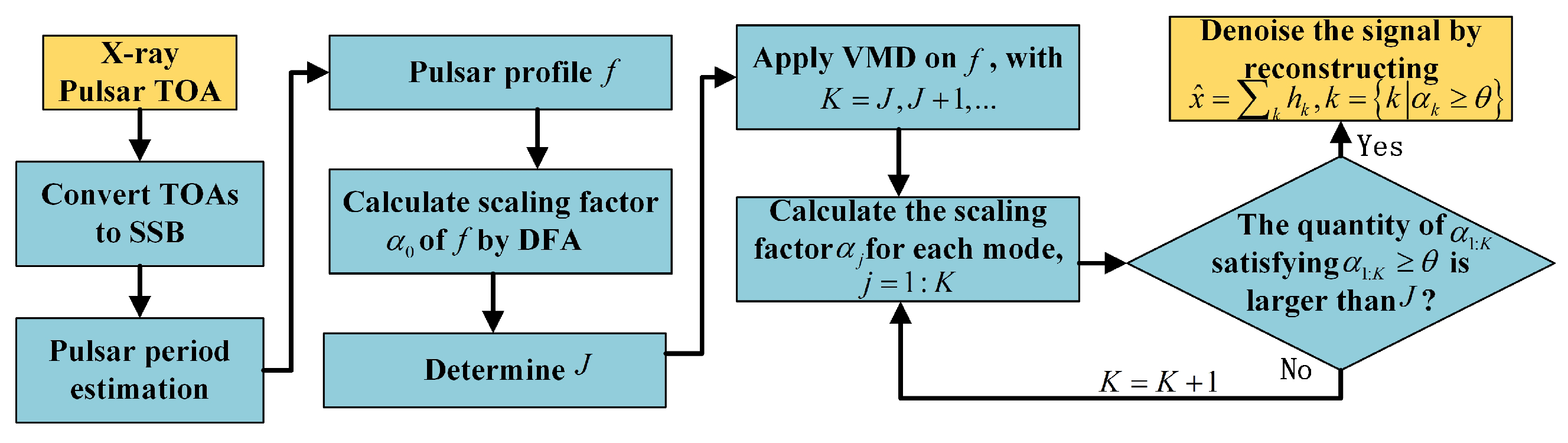
3.2. Denoise of Pulse Profile Based on VMD
- Calculate the sumwhere .
- Divide the sequence into nonoverlap length-of-n pieces. As for each local trend, one can apply l-order polynomial to fit . For example, let and definewhere and denote constants.
- Define the root-mean-square (RMS) function by
- Finally, calculate the scaling exponent by the least square regression approach as follows,The relationship between K and can be understood in the sense that the quantity of all scaling exponents under the constraint equals J, where denotes the threshold and for the white Gaussian noise. Without losing generality, we suppose that the noise of the pulsar signal received by probes satisfies the Gaussian distribution.
4. Experimental Analysis
4.1. Experiments of Simulation Data
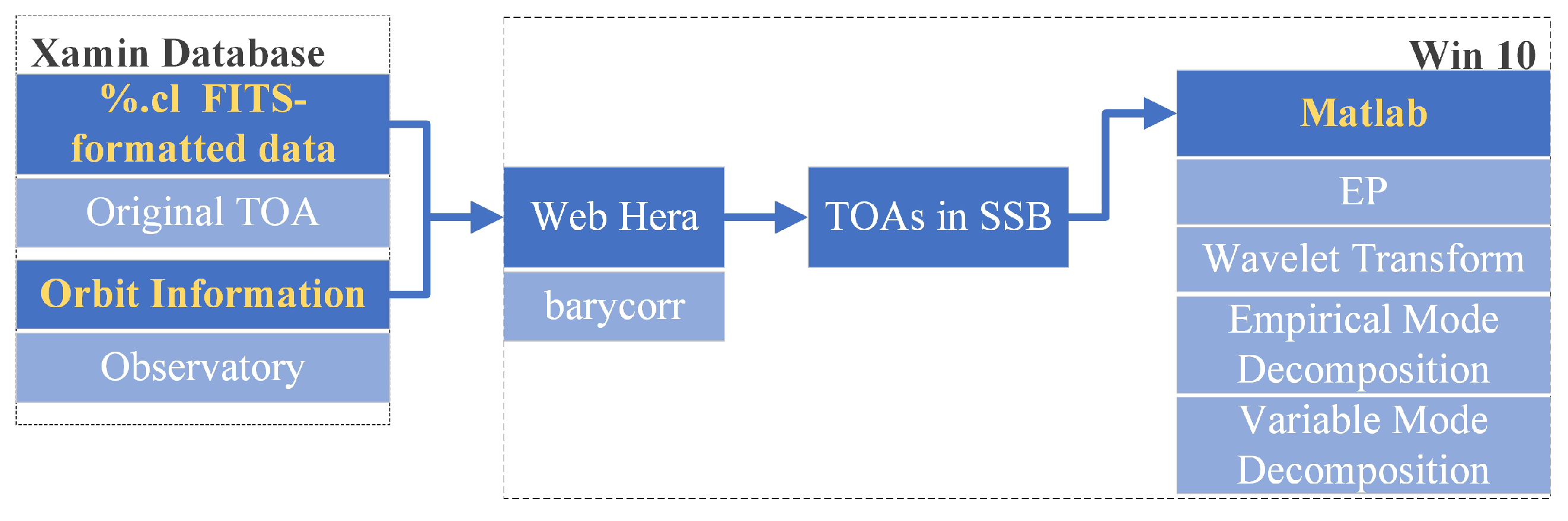
4.2. Experiments of HEASARC-Archived Data
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Xue, M.; Li, X.; Fu, L.; Liu, X.; Sun, H.; Shen, L. Denoising of X-ray pulsar observed profile in the undecimated wavelet domain. Acta Astronaut. 2016, 118, 1–10. [Google Scholar] [CrossRef]
- Buhler, R.; Blandford, R. The surprising crab pulsar and its nebula: A review. Rep. Prog. Phys. 2014, 77, 066901. [Google Scholar] [CrossRef] [Green Version]
- DeLaney, T.; Weatherall, J. Model for deterministic chaos in pulsar radio signals and search for attractors in the Crab and Vela pulsars. Astrophys. J. 1999, 519, 291. [Google Scholar] [CrossRef] [Green Version]
- Hankins, T.; Kern, J.; Weatherall, J.; Elike, J. Nanosecond radio bursts from strong plasma turbulence in the Crab pulsar. Nature 2003, 422, 141–143. [Google Scholar] [CrossRef] [PubMed]
- Schembri, F.; Sapuppo, F.; Bucolo, M. Experimental classification of nonlinear dynamics in microfluidic bubbles’ flow. Nonlinear Dyn. 2012, 67, 2807–2819. [Google Scholar] [CrossRef]
- Bucolo, M.; Grazia, F.D.; Sapuppo, F.; Virzi, M.C. A new approach for nonlinear time series characterization. In Proceedings of the 2008 16th Mediterranean Conference on Control and Automation, Ajaccio, France, 25–27 June 2008. [Google Scholar]
- Bonasera, A.; Bucolo, M.; Fortuna, L.; Frasca, M.; Rizzo, A. A new characterization of chaotic dynamics: The d∞ parameter. Nonlinear Phenom. Complex Syst. 2003, 6, 779–786. [Google Scholar]
- Shuai, P.; Chen, S.; Wu, Y.; Zhang, C.; Li, M. Navigation principles using X-ray pulsars. J. Astronaut. 2007, 28, 1538–1543. [Google Scholar]
- Wang, L.; Zhang, S.; Lu, F. Pulsar signal denoising method based on empirical mode decomposition and independent component analysis. In Proceedings of the 2018 Chinese Automation Congress (CAC), Xi’an, China, 30 November–2 December 2018; pp. 3218–3221. [Google Scholar]
- Buist, P.J.; Engelen, S.; Noroozi, A.; Sundaramoorthy, P.; Verhagen, S.; Verhoeven, C. Overview of pulsar navigation: Past, present and future trends. Navigation 2011, 58, 153–164. [Google Scholar] [CrossRef]
- Sun, J.; Xu, L.; Wang, T. New denoising method for pulsar signal. J. Xidian Univ. 2010. [Google Scholar]
- Jia, Y. General solution to diagonal model matching control of multiple-output-delay systems and its applications in adaptive scheme. Prog. Nat. Sci. 2009, 19, 79–90. [Google Scholar] [CrossRef]
- Jia, Y. Robust control with decoupling performance for steering and traction of 4WS vehicles under velocity-varying motion. IEEE Trans. Control. Syst. Technol. 2000, 8, 554–569. [Google Scholar]
- Lan, S.; Xu, G.; Zhang, J. Interspacecraft ranging for formation flying based on correlation of pulsars. Syst. Eng. Electron. 2010, 3, 650–654. [Google Scholar]
- Dahal, P. Review of pulsar timing array for gravitational wave research. J. Astrophys. Astron. 2020, 41, 8. [Google Scholar] [CrossRef] [Green Version]
- Xie, Q.; Xu, L.; Zhang, H. X-ray pulsar signal detection using photon interarrival time. J. Syst. Eng. Electron. 2013, 24, 899–905. [Google Scholar] [CrossRef]
- Xue, M.; Li, X.; Liu, Y.; Fang, H.; Sun, H.; Shen, L. Denoising of X-ray pulsar observed profile using biorthogonal lifting wavelet transform. J. Syst. Eng. Electron. 2016, 27, 514–523. [Google Scholar] [CrossRef]
- Liang, H.; Zhan, Y. A fast detection algorithm for the X-ray pulsar signal. Math. Probl. Eng. 2017, 2017, 9607821. [Google Scholar] [CrossRef] [Green Version]
- Mitchell, J.; Winternitz, L.; Hassouneh, M.; Price, S.; Semper, S.; Yu, W.; Ray, P.; Wolf, M.; Kerr, M.; Wood, K. Sextant X-ray pulsar navigation demonstration: Initial on-orbit results. In Proceedings of the American Astronautical Society 41st Annual Guidance and Control Conference, Breckenridge, CO, USA, 1–7 February 2018. [Google Scholar]
- Su, Z.; Wang, Y.; Xu, L.-P.; Luo, N. A new pulsar integrated pulse profile recognition algorithm. J. Astronaut. 2010, 31, 1563–1568. [Google Scholar]
- Li, F.; Zhang, B.; Verma, S.; Marfurt, K. Seismic signal denoising using thresholded variational mode decomposition. Explor. Geophys. 2018, 49, 450–461. [Google Scholar] [CrossRef]
- Song, J.; Qu, J.; Xu, G. Modified kernel regression method for the denoising of X-ray pulsar profiles. Adv. Space Res. 2018, 62, 683–691. [Google Scholar] [CrossRef]
- Garvanov, I.; Iyinbor, R.; Garvanova, M.; Geshev, N. Denoising of pulsar signal using wavelet transform. In Proceedings of the 2019 16th Conference on Electrical Machines, Drives and Power Systems (ELMA), Varna, Bulgaria, 6–8 June 2019; pp. 1–4. [Google Scholar]
- You, S.; Wang, H.; He, Y.; Xu, Q.; Feng, L. Frequency domain design method of wavelet basis based on pulsar signal. J. Navig. 2020, 73, 1223–1236. [Google Scholar] [CrossRef]
- Singh, A.; Pathak, K. A machine learning-based approach towards the improvement of snr of pulsar signals. arXiv 2020, arXiv:2011.14388. [Google Scholar]
- Jiang, Y.; Jin, J.; Yu, Y.; Hu, S.; Wang, L.; Zhao, H. Denoising method of pulsar photon signal based on recurrent neural network. In Proceedings of the 2019 IEEE International Conference on Unmanned Systems (ICUS), Beijing, China, 17–19 October 2019; pp. 661–665. [Google Scholar]
- Huang, N.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.; Zheng, Q.; Yen, N.; Tung, C.; Liu, H. The empirical mode decomposition and the hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. R. Soc. Lond. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Jin, J.; Ma, X.; Li, X.; Shen, Y.; Huang, L.; He, L. Pulsar signal de-noising method based on multivariate empirical mode decomposition. In Proceedings of the 2015 IEEE International Instrumentation and Measurement Technology Conference (I2MTC) Proceedings, Pisa, Italy, 11–14 May 2015; pp. 46–51. [Google Scholar]
- Caesarendra, W.; Kosasih, P.; Tieu, A.; Moodie, C.; Choi, B. Condition monitoring of naturally damaged slow speed slewing bearing based on ensemble empirical mode decomposition. J. Mech. Sci. Technol. 2013, 27, 2253–2262. [Google Scholar] [CrossRef]
- Wu, Z.; Huang, N. Ensemble empirical mode decomposition: A noise-assisted data analysis method. Adv. Adapt. Data Anal. 2009, 1, 1–41. [Google Scholar] [CrossRef]
- Wang, L.; Shao, Y. Fault feature extraction of rotating machinery using a reweighted complete ensemble empirical mode decomposition with adaptive noise and demodulation analysis. Mech. Syst. Signal Process. 2020, 138, 106545. [Google Scholar] [CrossRef]
- Li, X.; Jin, J.; Wang, M.; Liu, Y.; Shen, Y. X-ray pulsar signal denoising based on emd with adaptive thresholding. In Proceedings of the 2014 IEEE International Instrumentation and Measurement Technology Conference (I2MTC) Proceedings, Montevideo, Uruguay, 12–15 May 2014; pp. 977–982. [Google Scholar]
- Jia, Y. Alternative proofs for improved LMI representations for the analysis and the design of continuous-time systems with polytopic type uncertainty: A predictive approach. IEEE Trans. Autom. Control 2003, 48, 1413–1416. [Google Scholar]
- Dragomiretskiy, K.; Zosso, D. Variational mode decomposition. IEEE Trans. Signal Process. 2013, 62, 531–544. [Google Scholar] [CrossRef]
- Liu, Y.; Yang, G.; Li, M.; Yin, H. Variational mode decomposition denoising combined the detrended fluctuation analysis. Signal Process. 2016, 125, 349–364. [Google Scholar] [CrossRef]
- Lu, J.; Yue, J.; Zhu, L.; Li, G. Variational mode decomposition denoising combined with improved bhattacharyya distance. Measurement 2020, 151, 107283. [Google Scholar] [CrossRef]
- Wang, Y.; Markert, R.; Xiang, J.; Zheng, W. Research on variational mode decomposition and its application in detecting rub-impact fault of the rotor system. Mech. Syst. Signal Process. 2015, 60, 243–251. [Google Scholar] [CrossRef]
- Lian, J.; Liu, Z.; Wang, H.; Dong, X. Adaptive variational mode decomposition method for signal processing based on mode characteristic. Mech. Syst. Signal Process. 2018, 107, 53–77. [Google Scholar] [CrossRef]
- Zhao, Y.; Jia, Y.; Chen, Q. Denoising of X-Ray Pulsar Signal Based on Variational Mode Decomposition. In Chinese Intelligent Systems Conference; Springer: Singapore, 2020; pp. 419–427. [Google Scholar]
- Garvanov, I.; Garvanova, M.; Kabakchiev, C. Pulsar signal detection and recognition. In Proceedings of the Eighth International Conference on Telecommunications and Remote Sensing, Rhodes, Greece, 16–17 September 2019; pp. 30–34. [Google Scholar]
- El, S.; Alexandre, R.; Boudraa, A. Analysis of intrinsic mode functions: A pde approach. IEEE Signal Process. Lett. 2009, 17, 398–401. [Google Scholar]
- Zhao, Y. On the Denoising of X-ray Pulsar Signals. Bachelor’s Thesis, Beihang University, Beijing, China, 2020. [Google Scholar]
- Shen, L. Research on the X-ray Pulsar Navigation. Bachelor’s Thesis, Xidian University, Xi’an, China, 2017. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | ORI | EP | WT | EMD | VMD |
|---|---|---|---|---|---|
| SNR | −0.1145 | 22.8210 | 25.9410 | 27.2745 | 29.8821 |
| RMSE | 1.0121 | 0.0727 | 0.0508 | 0.0435 | 0.0313 |
| PCC | 0.1554 | 0.8619 | 0.9251 | 0.9441 | 0.9668 |
| Method | Ori | EP | WT | EMD | VMD |
|---|---|---|---|---|---|
| SNR | 7.8000 | 25.9117 | 27.9890 | 29.1157 | 30.3373 |
| RMSE | 0.4132 | 0.0506 | 0.0391 | 0.0339 | 0.0270 |
| PCC | 0.0462 | 0.8748 | 0.9138 | 0.9277 | 0.9480 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Q.; Zhao, Y.; Yan, L. X-ray Pulsar Signal Denoising Based on Variational Mode Decomposition. Entropy 2021, 23, 1181. https://doi.org/10.3390/e23091181
Chen Q, Zhao Y, Yan L. X-ray Pulsar Signal Denoising Based on Variational Mode Decomposition. Entropy. 2021; 23(9):1181. https://doi.org/10.3390/e23091181
Chicago/Turabian StyleChen, Qiang, Yong Zhao, and Lixia Yan. 2021. "X-ray Pulsar Signal Denoising Based on Variational Mode Decomposition" Entropy 23, no. 9: 1181. https://doi.org/10.3390/e23091181