1. Introduction
Classical flocking dynamics in nature include the coordinated flight of birds, the vortices of fish, the collective migration of ant colonies, and the growth and self-organizing activation of cells, etc. [
1,
2]. Rich and highly coordinated flocking behaviors emerge in systems composed of interconnected and constantly moving individuals. The main purpose of flocking research is to reveal dynamic behaviors of complex systems and guide engineering applications such as UAV flight and robot formation.
Flocking describes a phenomenon in which self-driven particles are connected by simple rules and organized from a disordered state to ordered motion. Vicsek [
3] described the formation mechanism of flocking behavior by means of numerical experiments. Jadbabaie [
4] strictly proved the correctness of the above numerical experiments based on certain assumptions from the view point of mathematics. Since then, many mathematical models have emerged to study the consistency and flocking behavior of multi-agent systems [
5,
6,
7]. In 2007, Cucker and Smale [
8] proposed the Cucker–Smale model (CS model) on the basis of the Vicsek model. The dynamic equation of the
i-th particle is as follows
where
is the communication weight. When
, an unconditional flocking of the CS model is achieved. In this model, there is no constraint that velocities must be the same. Furthermore, the communication weight is related to the absolute distance between the
i-th particle and its neighbor. It is consistent with the actual situation. Many scholars have carried out research on the CS model [
9,
10,
11,
12].
Shen [
13] studied the CS system with asymmetric interaction structure, which is the CS system under hierarchy. Each particle is only affected by the leadership set. When
, the continuous system can achieve unconditional cluster motion.
Ha [
14] presented a thermodynamically consistent particle (TCP) model based on the theory of multi-temperature mixing of fluids in the case of spatially homogeneous processes. The proposed thermodynamic model includes the flocking model of the CS type as its isothermal approximation. Then, Ha [
15] proposed a new type of CS model, called a thermodynamic Cucker–Smale model (TCS model). It describes a phenomenon caused by different internal temperature variations between particles in the gas mixture system. If the initial temperature is homogeneous (
), the system is reduced to the CS model. The TCS system is derived by the entropy theory on the basis of the traditional dynamic system, which is a fusion of thermodynamics and complex networks. The TCS model has a noise term not only in the velocity differential equation but also in the temperature equation. The estimation of this asymmetric network has much broader real-world applications. Many scholars have conducted in-depth research on the TCS system [
16,
17,
18].
Most modeling of flocking systems only considers the dynamics of the same particles. In real scenarios, however, we need to study the flocking of different particles. Firstly, our TCS model can better simulate the temperature variation of the particles in the system in a more realistic way. The TCS model describes the temperature variation of the particles and explores the internal energy, while the traditional CS model only considers the mechanical motion of the particles. Secondly, we study the TCS system with perturbations to describe the flocking behavior of systems composed of different particles. The active particles discussed in our system are not identical and their motion has some degrees of freedom. Moreover, the establishment of leaders is a common tool in formation control, so the TCS model is studied under hierarchy to simulate the situation. Finally, the inclusion of white noise can better model the effect of environmental factors on the system. Based on this, this paper investigates the flocking behavior of the TCS model with multiplicative white noise under a hierarchical leader. The particles considered in the system are not identical and perturbation terms are introduced into the velocity variation of the particles, allowing a degree of flexibility for each particle. It is shown that the system can satisfy flocking under certain conditions. This conclusion is verified by numerical simulation results.
2. System Descriptions and Main Results
Definition 1 ([
13]).
A group is said to be under a hierarchical leadership if, for all , the adjacency matrix satisfies (1) ; (2) for all , the set . is the leading set of the i-th particle. Our model is described as follows
where
and
are coupling strengths and noise intensity coefficient
is one-dimensional Brownian motion. We consider the white Gauss noises [
19,
20] which are independently identically distributed.
where
are the expectation and variance of random variables, respectively. Furthermore,
are the inter-individual connection weight functions [
21].
Furthermore, we study System (
2) with disturbance functions of time
. The TCS model is turned into
Definition 2 ([
14]).
A group is said to be flocking if, for all , satisfy (1) (2) (3) . The flocking behaviors of systems are discussed under the above definition. The main results are as follows. For System (
2), we have
Theorem 1. We suppose that is a hierarchical group. Particle 1 is the global leader and moves at a constant temperature. For , if , the temperatures of System (2) have asymptotic consistency. Theorem 2. We suppose that is a hierarchical group. Particle 1 is the global leader and moves at a constant speed. If, for , System (2) can achieve flocking. Theorem 3. We suppose that is a hierarchical group. System (3) satisfies and . Particle 1 is the global leader and the change in velocity only depends on . If, for , System (3) can achieve flocking. 3. Result Proof of System (2)
3.1. Proof of Theorem 1
Lemma 1. Let be the solution of the TCS system. Temperatures have the minimum value .
Proof. is given. We defined a set
From the continuity of
and the definition of
, it follows that
and then
is proved by reduction to absurdity.
We consider
; hence there exists
obtaining
. For
, since
is a monotone subtracting function and
, we have
Because
is a monotone decreasing function,
and
, there is
, such that
When
, the left value of (
8) tends to
. It yields a conflict, which means
. Therefore, for any
, we have
According to the arbitrariness of
,
It is obvious that the minimum value . □
Remark 1. We explain the maximum situation , whose proof is the same as the minimum part.
Remark 2. According to , , where is a constant.
Lemma 2. If particle 1 is the global leader and moves at a constant speed, for any , , where is a constant.
Proof. First, we prove
is bounded by reduction to absurdity. If
is unbounded, there exists a component
which satisfies
. Integrate the second equation of the system and calculate the expected result
Since
, (
11) implies
. A contradiction appears, which means
is bounded.
We assume that are bounded. The presence of makes . A mathematical induction method is used to prove is bounded.
Assuming that
is unbounded, there exists a component
which satisfies
. Integrate the equation and calculate the expected result
Since
, (
12) implies
. A contradiction appears, which means
is bounded. □
Because of the norm inequality , there is a satisfying .
Lemma 3. We consider a hierarchical population of two individuals, corresponding to , satisfying the following equationincluding - (1)
- (2)
There are , for all , bringing into existence.
Proof. From (
13), we have
From Lemma 1, there is a nonnegative constant
D causing
. We take advantage of the property of expectation
For
, when
, there exist
satisfying
Therefore,
When
, similarly to
, we have
. There exists
, when
, such that
. Since
, there are
and
. For
,
From (
14)–(
18), by defining
, we obtain
There are
satisfying
. According to the comparison theorem, when
,
□
Next, we give the proof of Theorem 1.
Proof. (Proof of Theorem 1)
The conclusion is proved to be valid for a subpopulation
. According to the definition of hierarchical groups,
, and the thermostatic movement of agent1, the following equation can be known
It is available that
which satisfies the conditions of Lemma 3. There are
independent of
t such that
.
It is assumed that the subgroup
satisfies the lemma condition, where
. We obtain constants
such that
We need to prove the subgroup
also satisfies the lemma condition. Consider the average temperature of all leaders of individual
lFor each individual
, using the above equation, we get
Let
, we get
The following inequality is given by
and
The inequality above satisfies Lemma 3. There exist
such that
Using the norm inequality, we get
where
. It is true that
□
3.2. Proof of Theorem 2
Lemma 4. We assume (considering a hierarchical population of two individuals corresponding to ), satisfying the following equationsincluding - (1)
- (2)
- (3)
There are , for all , bringing into existence.
Proof. We use the
formula
The calculation results are in the following equations.
First, we estimate
. For
Second, we estimate
From Lemma 3, we have
. From Lemma 2, we have
. For
,
Third, we estimate
. From Lemma 3.1, there is a nonnegative constant
causing
. For
, we take advantage of the properties of expectations,
where
.
For
, there are
and
. For
From (
37), (
38), (
40), (
41) and (
42), by defining
we obtain
There are
satisfying
. According to the comparison theorem, when
,
□
Next, we give the proof of Theorem 2.
Proof. (Proof of Theorem 2)
For the subgroup , the theorem is proved by mathematical induction.
The conclusion is proved to be valid for a subpopulation
. According to the definition of the hierarchical group,
, and a constant-speed movement of agent1, we have
It is available that
which satisfy the conditions of Lemma 4. The existence of
independent of
t make
true.
It is assumed that the subgroup
satisfies the lemma condition, where
. Then we obtain constants
such that
It is proved that the subgroup
also satisfies the lemma condition. We consider the average position and average velocity of all leaders of individual
l.
For each individual
, using the above equation, we get
Let
, we get
From Lemma 2,
, then we have
It is given by
, (
49) and temperature consistency that
The inequality above satisfies Lemma 4 condition. There exist
such that
Using the norm inequality, we get
where
. It is true that
□
4. Result Proof of System (3)
Lemma 5. Let be the solution of System (3), where If particle 1 is the global leader and the change in velocity only depends on , for any , , where is a constant.
Proof. By integrating (
60) and computing the expectation, it yields
The result holds.
First, we proof
is bounded by reduction to absurdity. If
is unbounded, there exists a component
which satisfies
. Integrate the second equation of the system and calculate the expected result
Since
and
, (
62) implies
. A contradiction appears, which means
is bounded.
We assume that are bounded. The presence of makes . A mathematical induction method is used to prove is bounded.
Assuming that
is unbounded, there exists a component
, which satisfies
. Integrate the equation and calculate the expected result
Since
and
, (
63) implies
. A contradiction appears, which means
is bounded. □
Since the norm inequality , there is a satisfying .
From Lemma 5, the proof of the temperature boundedness and consistency of the corresponding system are same as Lemma 3. Next, we discuss the fluctuation of velocities in the corresponding system.
Lemma 6. We assume (considering a hierarchical population of two individuals corresponding to ), satisfying the following equationsincluding - (1)
- (2)
- (3)
There are , for all , bringing into existence.
Proof. We use the
formula
The process of estimating
and
is the same as Lemma 4. Only the calculation of
is explained here. From Lemma 5, there is a nonnegative constant
causing
. For
, we take advantage of the properties of expectations,
where
.
It can be seen that (
66) is an extension of (
41) and thus all subsequent proofs apply. Then we have
□
Next, we give the proof of Theorem 3.
Proof. (Proof of Theorem 3)
For the subgroup , the theorem is proved by mathematical induction.
The conclusion is proved to be valid for a subpopulation
. According to the definition of hierarchical group,
, and a constant-speed movement of agent1, we have
It is available that
which satisfy the conditions of Lemma 6. The existence of
independent of
t make
true.
It is assumed that the subgroup
satisfies the lemma condition, where
. Then we obtain constants
such that
It is proved that the subgroup
also satisfies the lemma condition. We consider the average position and average velocity of all leaders of individual
l.
For each individual
, using the above equation, we get
Let
, we get
From Lemma 5,
, then we have
It is given by
, (
72) and temperature consistency that
The inequality above satisfies Lemma 6. There exist
such that
Using the norm inequality, we get
where
. It is true that
□
5. Numerical Simulation
This section uses computer simulation to verify the results of the theorems.
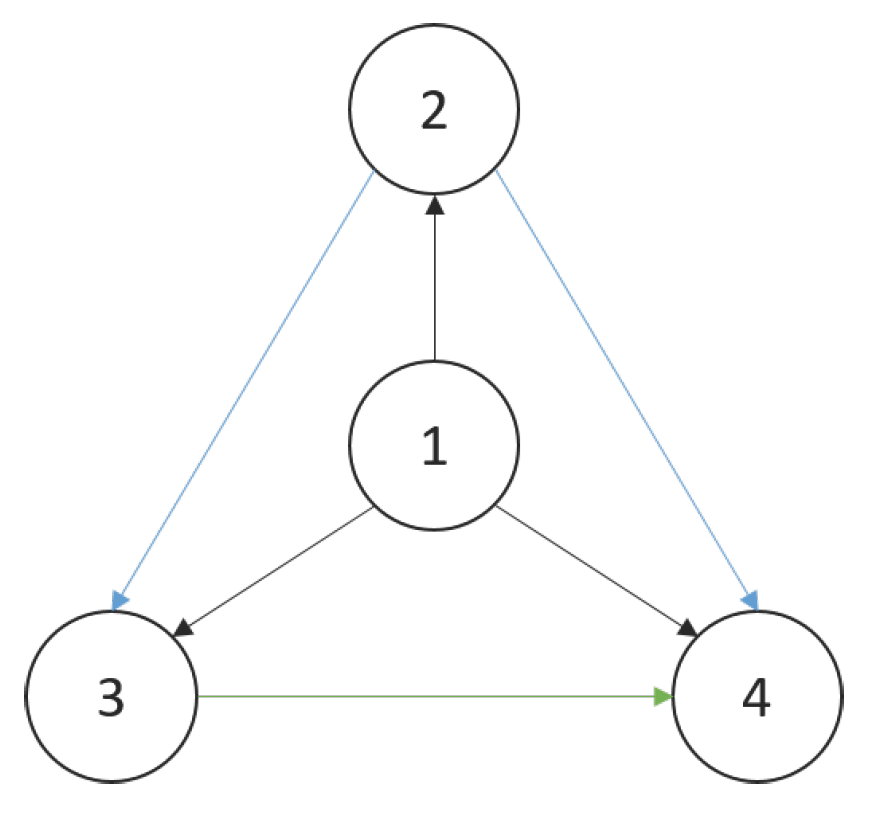
Figure 1 shows the directed graph of the hierarchy in the numerical experiment with four individuals as examples. The arrow in the figure points from the leader to the follower.
The total time t is 50 s, is 10 and is 5. For the initial data, we consider 12 particles as the hierarchical group whose initial positions and velocities are random numbers uniformly distributed in the interval .
5.1. Numerical Experiments for System (2)
We take and , which satisfies the theorem condition of this paper. Simulation results verify the correctness of the conclusion.
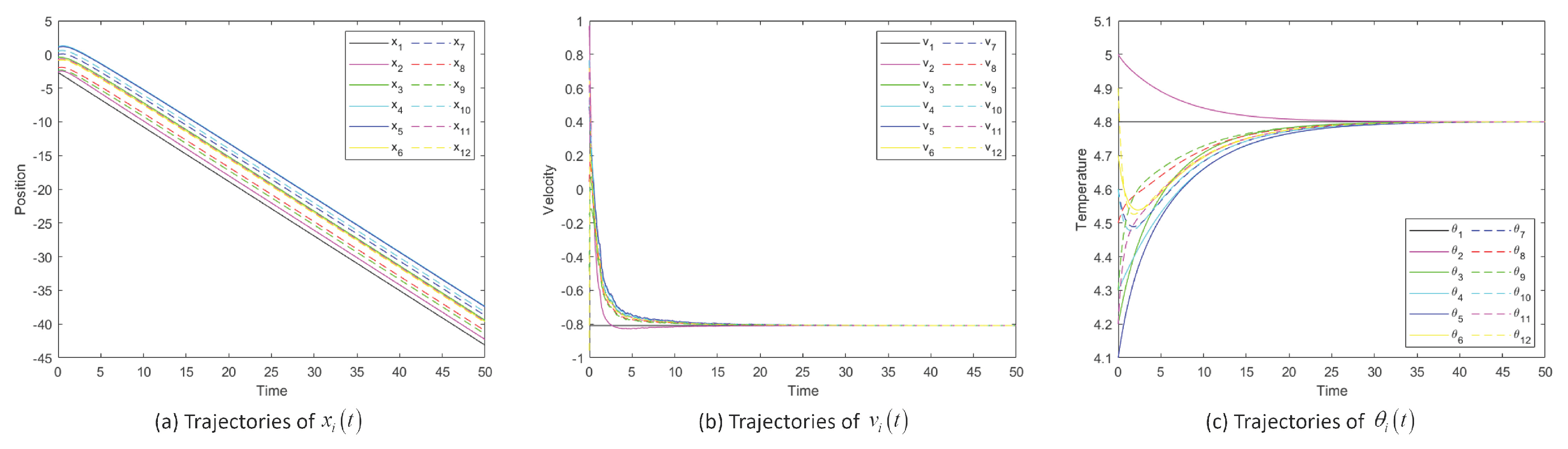
Figure 2 shows the position, velocity and temperature trajectory images of System (
2) changing with time when noise intensity
is 1. The temperature and velocity of each particle tend to match that of the overall leader (particle 1).
Figure 3 shows the position difference, velocity difference and temperature difference images of System (
2) when noise intensity
is 1. We introduce some functionals to describe the flocking process:
,
and
, which mean the differences between the maximum and minimum values at moment
t.
Figure 3a, b and c display the dynamics of
,
and
showing the fluctuations around the overall leader as a function of the choice of the coupling strength. Taking the same initial values, the systems converge when the values of
are 0.5, 0.3 and 0.1. The lower the
value, the larger the communication coefficient, and the sooner the system will reach flocking.
Then we take
and
.
Figure 4a and b, show the dynamics of
,
and
Figure 4c shows the velocity trajectory of each particle. System (
2) is unable to reach flocking state if the noise value is too large to satisfy the condition of the theorem. There is a tolerance limit to noise.
As shown in
Figure 2,
Figure 3 and
Figure 4, when certain conditions are met, the positions, velocities and temperatures in System (
2) are globally flocking, which shows the correctness of Theorem 1 and Theorem 2. The simulation results agree well with the conditions of our theorem, thus verifying our theorem. Due to the chaotic nature of the system, there is some oscillation in the velocity or velocity difference of the system.
5.2. Numerical Experiments for System (3)
For System (
3), the disturbance functions are as follows.
We take , which satisfies the theorem condition of this paper. Simulation results verify the correctness of the conclusion.
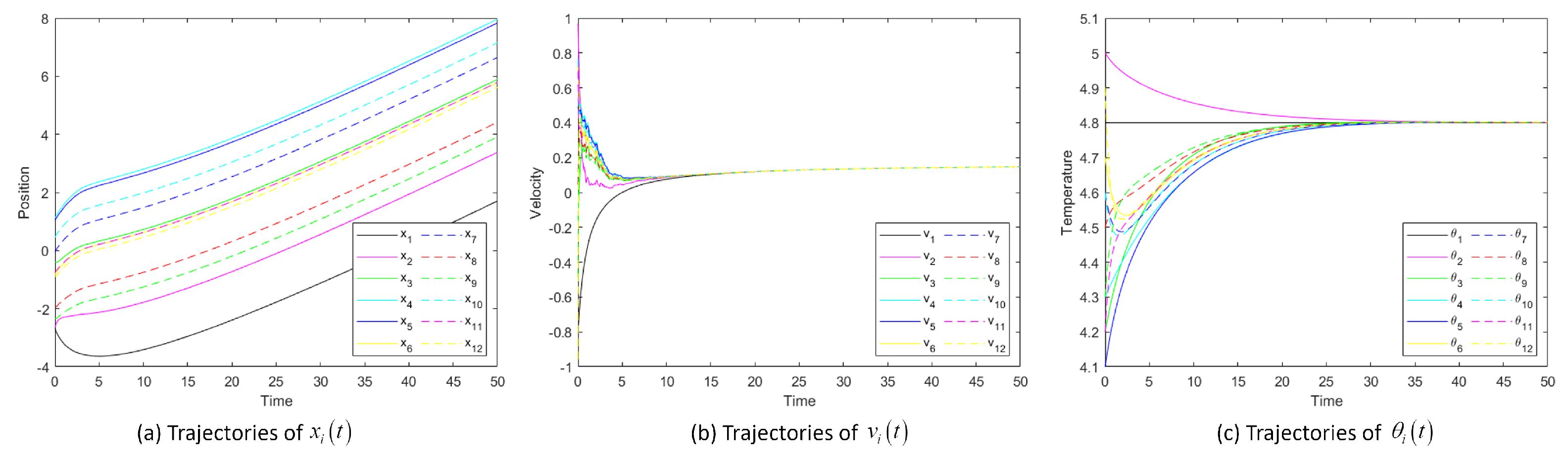
Figure 5 shows the position, velocity and temperature trajectory images of System (
3) changing with time when noise intensity
is 1 and
is 0.3.
Figure 5a, b and c show the states of all particles attaining flocking. After a few fluctuations, the particle swarm moves forward in a fixed formation around the leader (particle 1). Each particle’s temperature and velocity tend to match particle 1. This shows that the system achieves flocking, which is consistent with the description of the theorem.
In
Figure 6, corresponding to
,
Figure 6a, b and c show the position difference
, velocity difference
and temperature difference
images of System (
3). We observe that the experimental data are discrete and that particles move with a degree of freedom; the velocity curve is not smooth. Velocity difference tends to 0 over time; the system reaches flocking. For the TCS system, it has a noise term in the differential equation for velocity. The fluctuation of velocity decays exponentially.
Then we take
.
Figure 7a and b show the dynamics of
,
and
Figure 7c shows the velocity trajectory of each particle in System (
3). If the noise value is too large to satisfy the conditions of the theorem, the system will not reach the flocking state.
As shown in
Figure 5,
Figure 6 and
Figure 7, when certain conditions are met, the positions, velocities and temperatures in System (
3) are globally flocking, which shows the correctness of Theorem 3. The above numerical experiments show that in a TCS system with white noise under hierarchical leadership, adding a small perturbation to the velocity variation, the system can still achieve flocking when the noise satisfies the theorem conditions.
6. Conclusions
In this paper, the effect of multiplicative white noise on a TCS system with free disturbance under a hierarchical system is considered. Due to the properties of hierarchy, the system can be studied by mathematical induction. It is proved that, when the noise intensity meets certain conditions, the system can achieve flocking. The results are verified by numerical simulation. Similarly, we study the above models with perturbation functions and generate good results. We show that particles can keep pace with the determined overall leader, even if there exist some noises. Small perturbations do not affect the convergence of the hierarchy up to a certain noise limit.
Based on this system, other factors such as communication delay, system chaos and individual collision avoidance are all problems to be solved. According to the actual situation, this model is established to study the evolution of flocking dynamics. This mechanism can solve the problem of system consistency and cooperation, and has considerable application value in multi-robot flocking cooperation, UAV formation control, etc. For example, when the robot queue is disturbed, the whole team can also be consistent with the leader.
Author Contributions
Methodology, S.Y. and Y.J.; validation, S.Y., Y.S. and A.H.; writing—original draft preparation, S.Y.; writing—review and editing, Y.J. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the Natural Science Foundation of Jiangsu Province grant number BK20181342.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
No new data were created.
Conflicts of Interest
The authors declare no conflict of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| CS | Cucker–Smale |
| TCS | Thermodynamic Cucker–Smale |
| UAV | Unmanned aerial vehicle |
References
- Dell’Ariccia, G.; Dell’Omo, G.; Wolfer, D.P.; Lipp, H.P. Flock flying improves pigeons’ homing: GPS track analysis of individual flyers versus small groups. Anim. Behav. 2008, 76, 1165–1172. [Google Scholar] [CrossRef] [Green Version]
- Motsch, S.; Tadmor, E. A new model for self-organized dynamics and its flocking behavior. J. Stat. Phys. 2011, 144, 923–947. [Google Scholar] [CrossRef] [Green Version]
- Vicsek, T.; Czirok, A.; Ben-Jacob, E.; Cohen, I.; Shochet, O. Novel type of phase transition in a system of self-driven particles. Phys. Rev. Lett. 1995, 75, 1226. [Google Scholar] [CrossRef] [Green Version]
- Jadbabaie, A.; Lin, J.; Morse, A.S. Coordination of groups of mobile autonomous agents using nearest neighbor rules. IEEE Trans. Autom. Control 2003, 48, 988–1001. [Google Scholar] [CrossRef] [Green Version]
- Tanner, H.G.; Jadbabaie, A.; Pappas, G.J. Flocking in fixed and switching networks. IEEE Trans. Autom. Control 2007, 52, 863–868. [Google Scholar] [CrossRef]
- Ahn, S.; Bae, H.-O.; Ha, S.-Y.; Kim, Y.; Lim, H. Application of flocking mechanism to the modeling of stochastic volatility. Math. Model. Methods Applies Sci. 2013, 23, 1603–1628. [Google Scholar] [CrossRef]
- You, R.; Tang, M.; Guo, S.; Cui, G. Proportional Integral Observer-based Consensus Control of Discrete-time Multi-agent Systems. Int. J. Control. Autom. Syst. 2022, 20, 1461–1472. [Google Scholar] [CrossRef]
- Cucker, F.; Smale, S. Emergent behavior in flocks. IEEE Trans. Autom. Control 2007, 52, 852–862. [Google Scholar] [CrossRef] [Green Version]
- Ha, S.Y.; Lee, K.; Levy, D. Emergence of time-asymptotic flocking in a stochastic Cucker-Smale system. Commun. Math. Sci. 2009, 7, 453–469. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Wu, J. Flocking and asymptotic velocity of the Cucker-Smale model with processing delay. J. Math. Anal. Appl. 2014, 415, 53–61. [Google Scholar] [CrossRef]
- Ru, L.; Li, Z.; Xue, X. Cucker-Smale flocking with randomly failed interactions. J. Frankl. Inst. 2015, 352, 1099–1118. [Google Scholar] [CrossRef]
- Dong, J.G.; Ha, S.Y.; Jung, J.; Kim, D. Emergence of stochastic flocking for the discrete Cucker–Smale model with randomly switching topologies. Commun. Math. Sci. 2021, 19, 205–228. [Google Scholar] [CrossRef]
- Shen, J. Cucker-Smale flocking under hierarchical leadership. SIAM J. Appl. Math. 2007, 68, 694–719. [Google Scholar] [CrossRef] [Green Version]
- Ha, S.Y.; Ruggeri, T. Emergent Dynamics of a thermodynamically consistent particle model. Arch. Rational Mech. Anal. 2017, 233, 1397–1425. [Google Scholar] [CrossRef]
- Ha, S.Y.; Kim, J.; Ruggeri, T. Emergent behaviors of thermodynamic Cucker-Smale particles. Soc. Ind. Appl. Math. 2018, 50, 3092–3121. [Google Scholar] [CrossRef]
- Ha, S.Y.; Kim, J.; Min, C.H.; Ruggeri, T.; Zhang, X. Uniform stability and mean-field limit of a thermodynamic Cucker-Smale Model. Q. Appl. Math. 2018, 77, 131–176. [Google Scholar] [CrossRef]
- Dong, J.G.; Ha, S.Y.; Kim, D.; Kim, J. Time-delay effect on the flocking in an ensemble of thermomechanical Cucker-Smale particles. J. Differ. Equ. 2019, 266, 2373–2407. [Google Scholar] [CrossRef]
- Cho, H.; Dong, J.G.; Ha, S.Y. Emergent behaviors of a thermodynamic Cucker-Smale flock with a time-delay on a general digraph. Math. Methods Appl. Sci. 2021, 45, 164–196. [Google Scholar] [CrossRef]
- Cucker, F.; Mordecki, E. Flocking in noisy environments. J. Math. Pures Appl. 2008, 89, 278–296. [Google Scholar] [CrossRef] [Green Version]
- Ahn, S.; Ha, S.Y. Stochastic flocking dynamics of the Cucker-Smale model with multiplicative white noises. J. Math. Phys. 2010, 51, 103301. [Google Scholar] [CrossRef]
- Ballerini, M.; Cabibbo, N.; Candelier, R.; Zdravkovic, V. Interaction ruling animal collective behavior depends on topological rather than metric distance: Evidence from a field study. Proc. Natl. Acad. Sci. USA 2008, 105, 1232–1237. [Google Scholar] [CrossRef] [PubMed] [Green Version]
| Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}