
Toward a Unified Model Approach for Evaluating Different Electric Vehicles


 ,
,
Abstract
:1. Introduction
2. Related Works
3. Different Types of Electric Vehicles
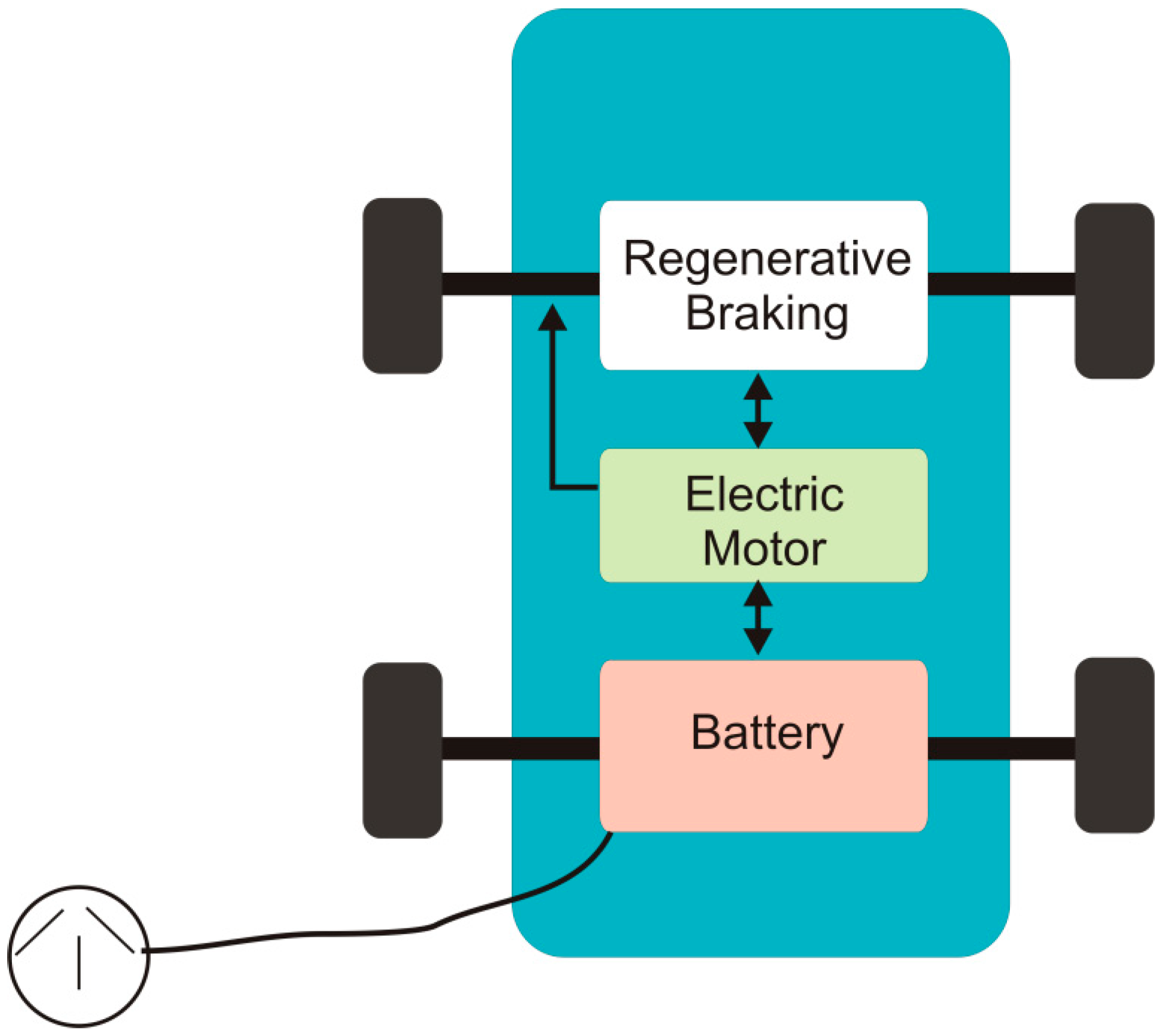
3.1. Battery Electric Vehicles (BEVs)
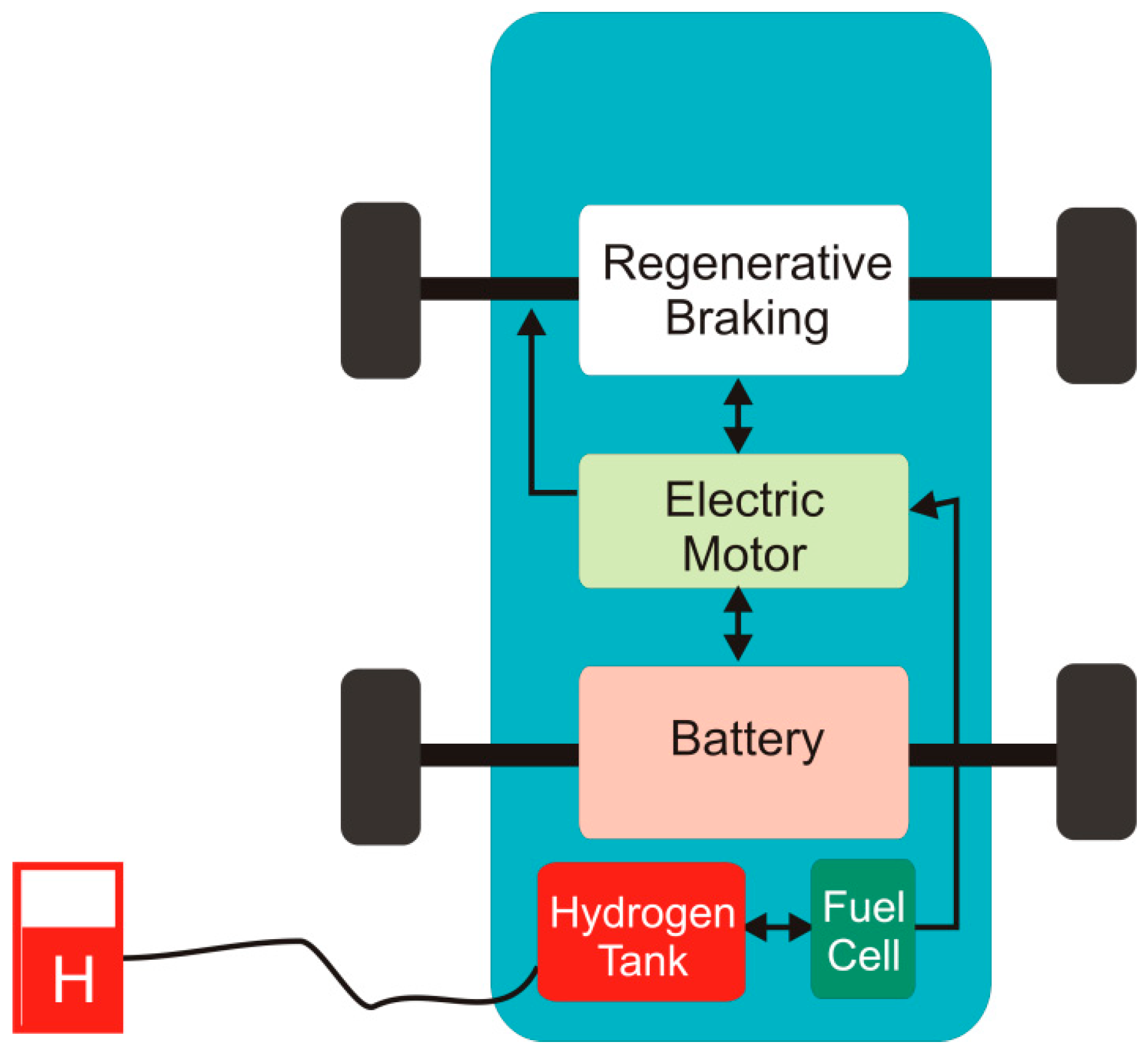
3.2. Fuel-Cell Electric Vehicles (FCEVs)
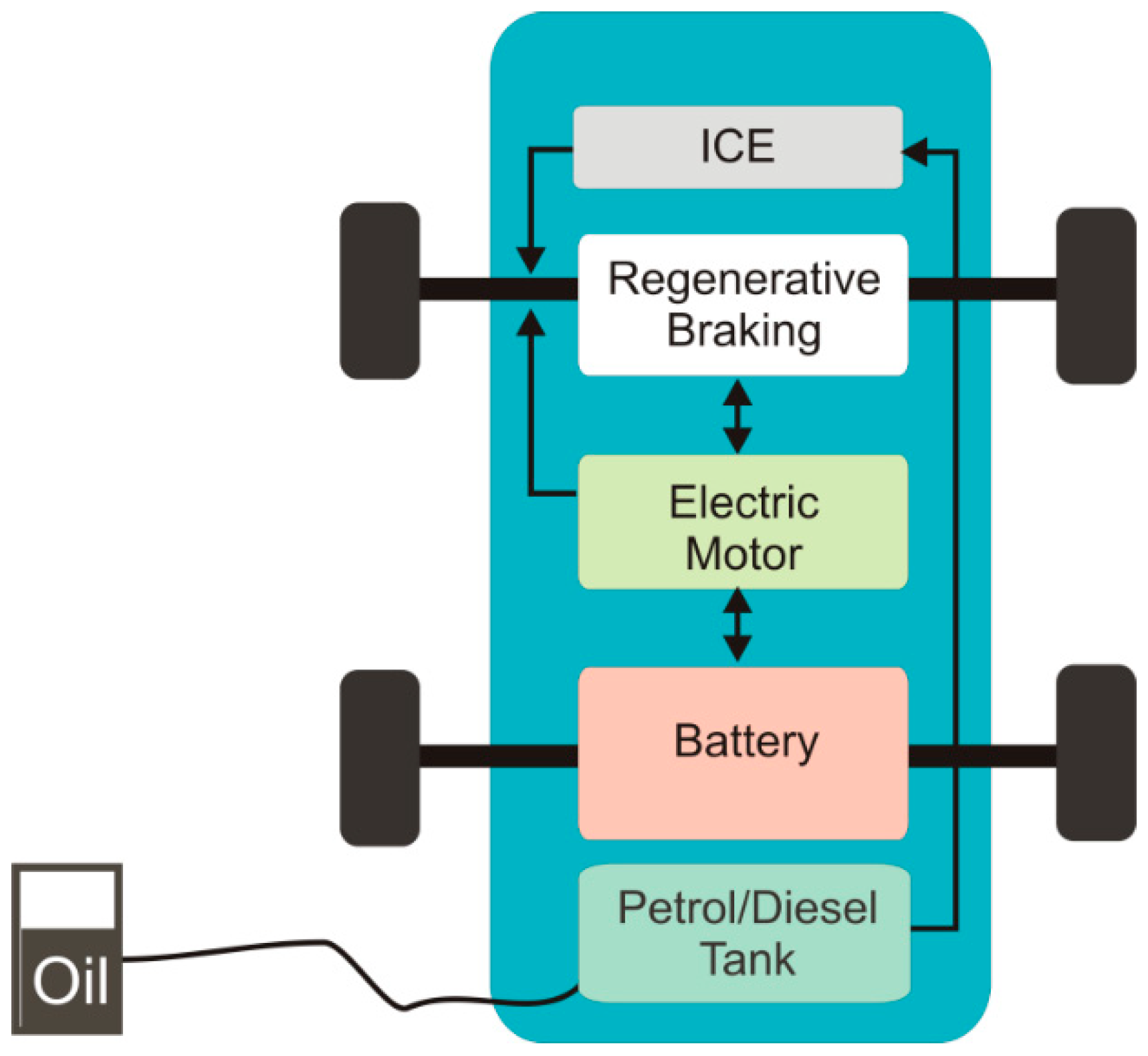
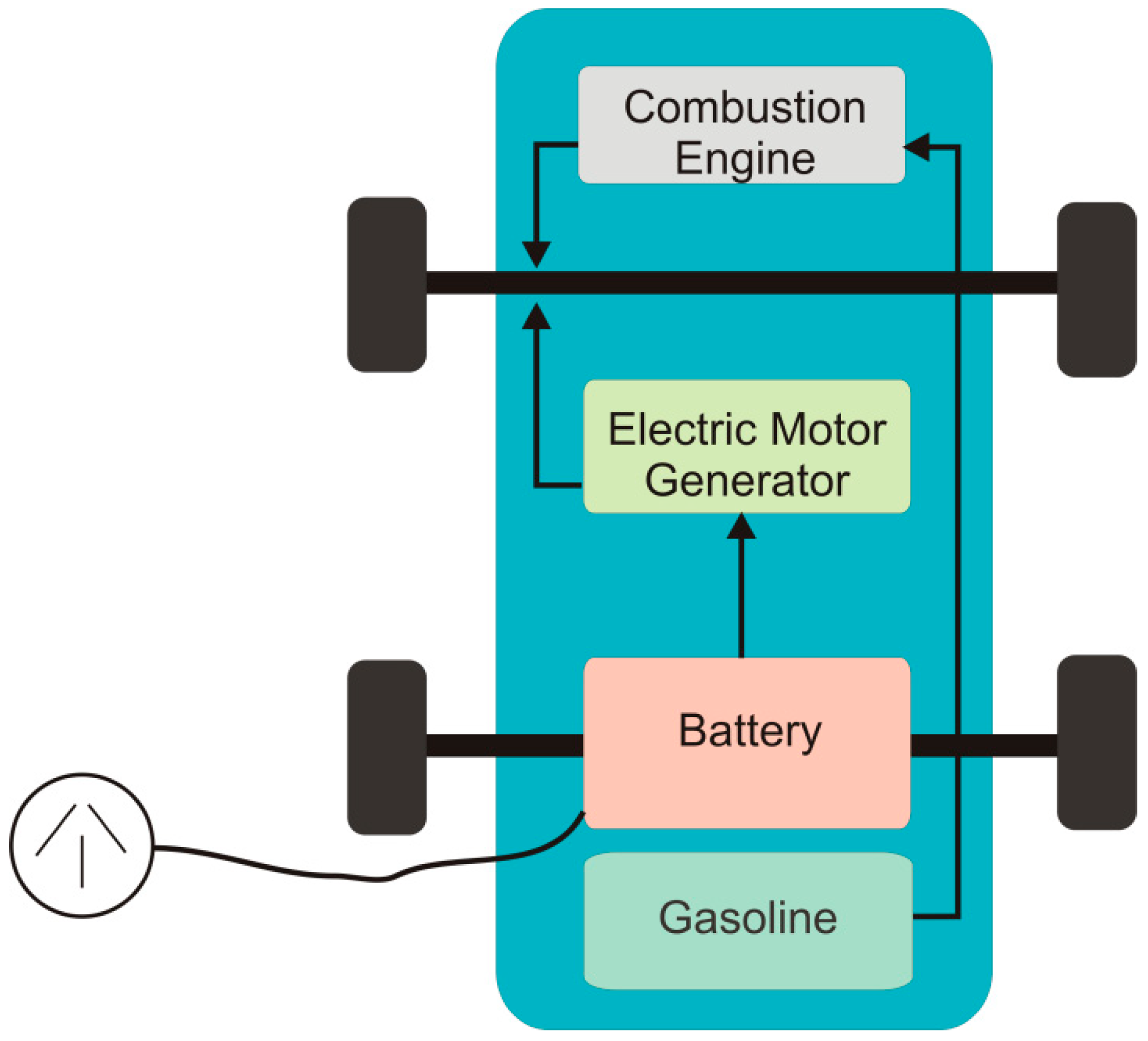
3.3. Hybrid Electric Vehicles (HEVs)
3.4. Plug-In Hybrid Electric Vehicles (PHEVs)
3.5. Range Extender Hybrid Electric Vehicles (REHEVs)
4. Methods and Results
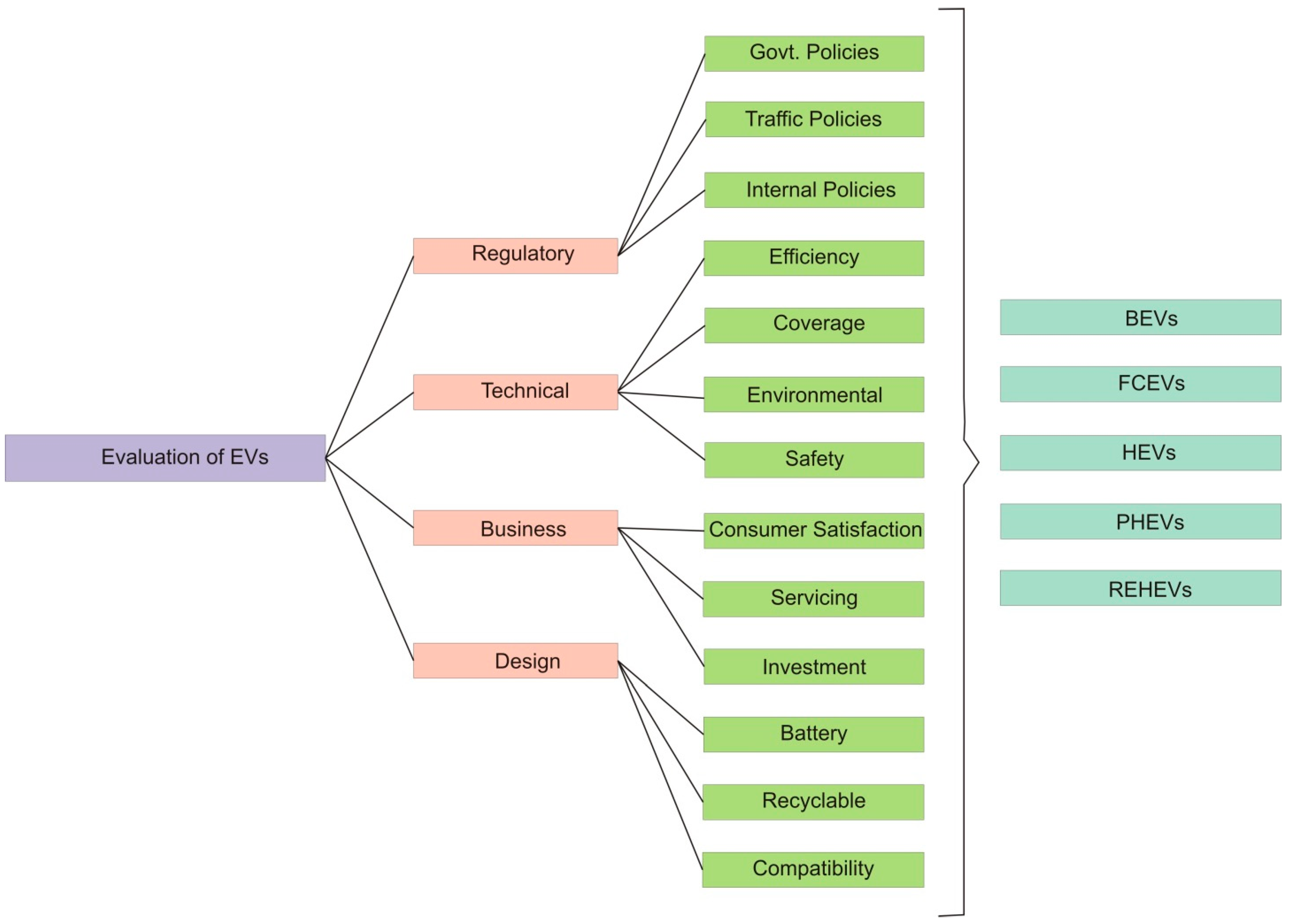
4.1. Hierarchical Design for the Evaluation of Different EVs
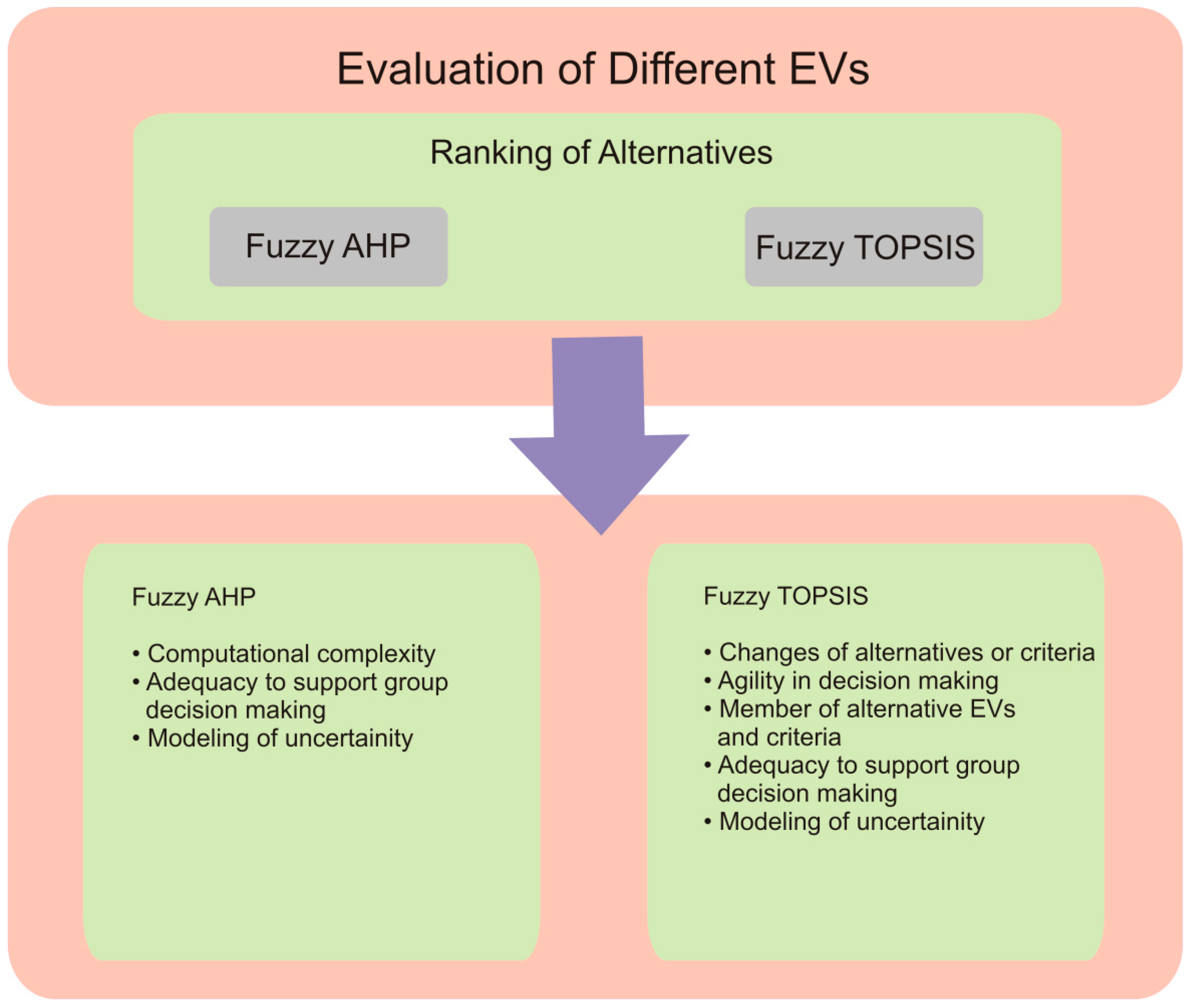
4.2. Fuzzy AHP-TOPSIS Methodology
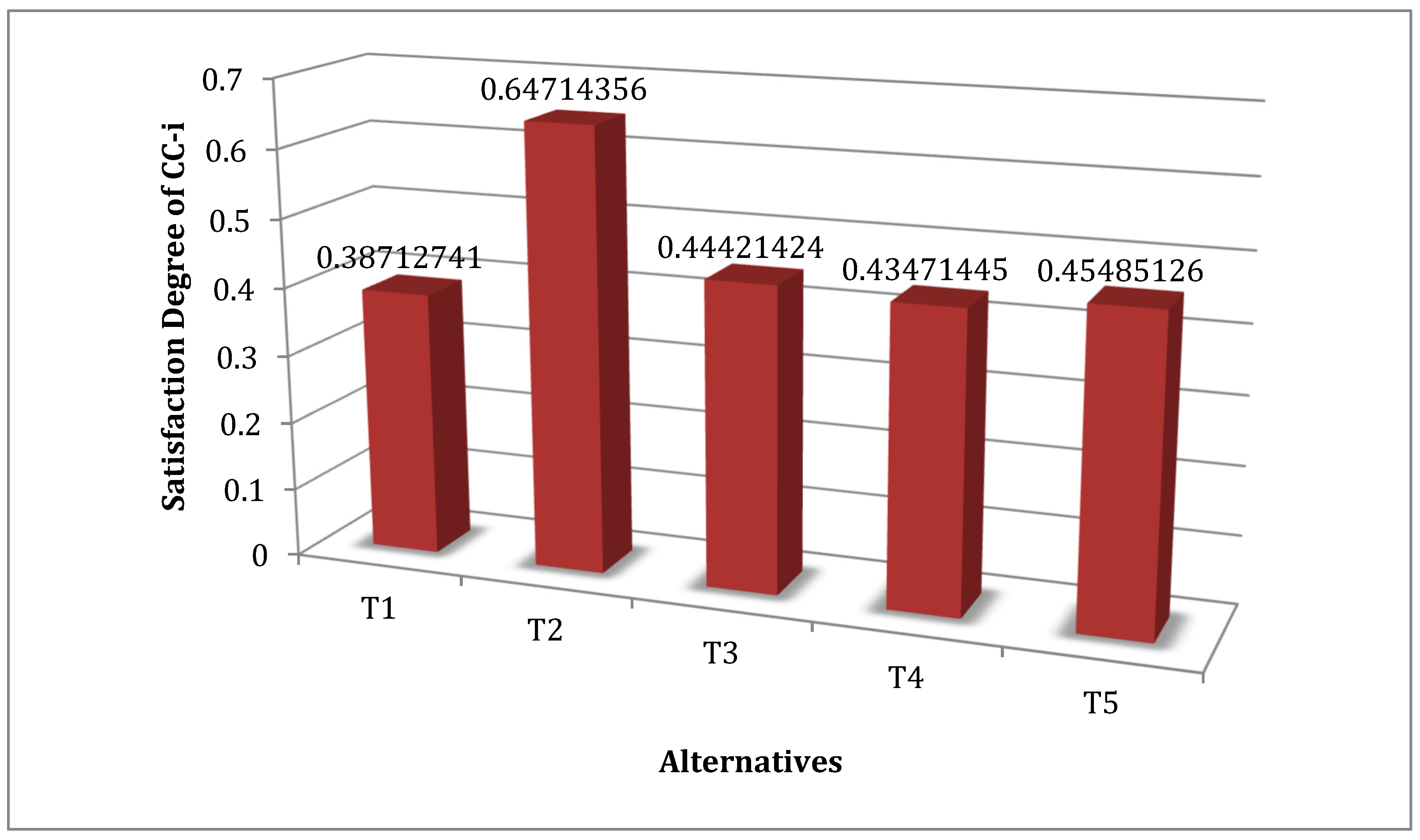
4.3. Statistical Results
4.4. Comparison with the Classical AHP-TOPSIS Method
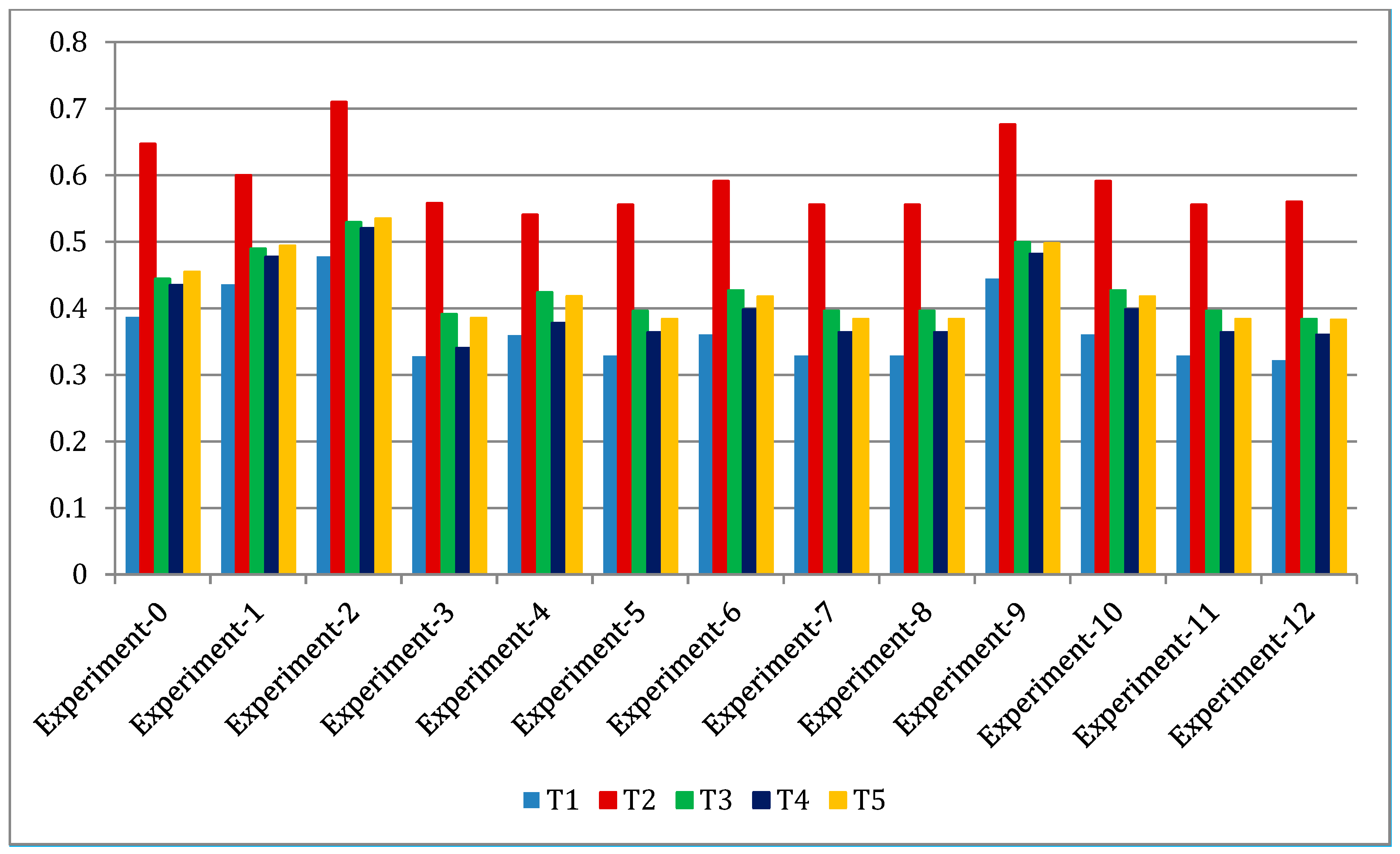
4.5. Sensitivity Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Pareek, S.; Sujil, A.; Ratra, S.; Kumar, R. Electric Vehicle Charging Station Challenges and Opportunities: A Future Perspective. In 2020 International Conference on Emerging Trends in Communication, Control and Computing (ICONC3); IEEE: Piscataway, NJ, USA, 2020; pp. 1–6. [Google Scholar]
- Habib, S.; Khan, M.M.; Abbas, F.; Sang, L.; Shahid, M.U.; Tang, H. A Comprehensive Study of Implemented International Standards, Technical Challenges, Impacts and Prospects for Electric Vehicles. IEEE Access 2018, 6, 13866–13890. [Google Scholar] [CrossRef]
- Shamshirband, M.; Salehi, J.; Gazijahani, F.S. Look-ahead risk-averse power scheduling of heterogeneous electric vehicles aggregations enabling V2G and G2V systems based on information gap decision theory. Electr. Power Syst. Res. 2019, 173, 56–70. [Google Scholar] [CrossRef]
- Ansari, T.J.; Pandey, D.; Alenezi, M. STORE: Security Threat Oriented Requirements Engineering Methodology. J. King Saud Univ. Comput. Inf. Sci. 2018, in press. [Google Scholar] [CrossRef]
- Sahu, K.; Alzahrani, F.A.; Srivastava, R.K.; Kumar, R. Hesitant Fuzzy Sets Based Symmetrical Model of Decision-Making for Estimating the Durability of Web Application. Symmetry 2020, 12, 1770. [Google Scholar] [CrossRef]
- Mackenzie, W. 2035: Can EVs Put the Brakes on Oil Demand? Wood Mackenzie. 2017. Available online: https://www.woodmac.com/news/editorial/2035-electric-vehicles-oil-demand/ (accessed on 10 September 2021).
- Wang, T.; Luo, H.; Zeng, X.; Yu, Z.; Liu, A.; Sangaiah, A.K. Mobility Based Trust Evaluation for Heterogeneous Electric Vehicles Network in Smart Cities. IEEE Trans. Intell. Transp. Syst. 2021, 22, 1797–1806. [Google Scholar] [CrossRef]
- Hashemnia, N.; Asaei, B. Comparative study of using different electric motors in the electric vehicles. In Proceedings of the 18th International Conference on Electrical Machines, Vilamoura, Portugal, 6–9 September 2008; pp. 1–5. [Google Scholar] [CrossRef]
- Prud’Homme, R.; Koning, M. Electric vehicles: A tentative economic and environmental evaluation. Transp. Policy 2012, 23, 60–69. [Google Scholar] [CrossRef] [Green Version]
- Iclodean, C.; Varga, B.; Burnete, N.; Cimerdean, D.; Jurchiş, B. Comparison of Different Battery Types for Electric Vehicles; IOP Publishing: Bristol, UK, 2017; Volume 252, p. 012058. [Google Scholar]
- Oh, S.C. Evaluation of Motor Characteristics for Hybrid Electric Vehicles Using the Hardware-in-the-Loop Concept. IEEE Trans. Veh. Technol. 2005, 54, 817–824. [Google Scholar] [CrossRef]
- Qiu, C.; Wang, G. New evaluation methodology of regenerative braking contribution to energy efficiency improvement of electric vehicles. Energy Convers. Manag. 2016, 119, 389–398. [Google Scholar] [CrossRef]
- Pfeiffer, J.; Wu, X.; Ayadi, A. Evaluation of Three Different Approaches for Automated Time Delay Estimation for Distributed Sensor Systems of Electric Vehicles. Sensors 2020, 20, 351. [Google Scholar] [CrossRef] [Green Version]
- Song, K.; Chen, H.; Wen, P.; Zhang, T.; Zhang, B.; Zhang, T. A comprehensive evaluation framework to evaluate energy management strategies of fuel cell electric vehicles. Electrochim. Acta 2018, 292, 960–973. [Google Scholar] [CrossRef]
- Wang, W.; Zhang, Q.; Peng, Z.; Shao, Z.; Li, X. An empirical evaluation of different usage pattern between car-sharing battery electric vehicles and private ones. Transp. Res. Part A Policy Pract. 2020, 135, 115–129. [Google Scholar] [CrossRef]
- Zhang, L.; Brown, T.; Samuelsen, S. Evaluation of charging infrastructure requirements and operating costs for plug-in electric vehicles. J. Power Sources 2013, 240, 515–524. [Google Scholar] [CrossRef]
- Khan, M.; Kockelman, K.M. Predicting the market potential of plug-in electric vehicles using multiday GPS data. Energy Policy 2012, 46, 225–233. [Google Scholar] [CrossRef] [Green Version]
- Tate, E.D.; Harpster, M.O.; Savagian, P.J. The Electrification of the Automobile: From Conventional Hybrid, to Plug-in Hybrids, to Extended-Range Electric Vehicles. SAE Int. J. Passeng. Cars Electron. Electr. Syst. 2008, 1, 156–166. [Google Scholar] [CrossRef] [Green Version]
- Offer, G.; Howey, D.; Contestabile, M.; Clague, R.; Brandon, N. Comparative analysis of battery electric, hydrogen fuel cell and hybrid vehicles in a future sustainable road transport system. Energy Policy 2010, 38, 24–29. [Google Scholar] [CrossRef] [Green Version]
- Shen, C.; Shan, P.; Gao, T. A Comprehensive Overview of Hybrid Electric Vehicles. Int. J. Veh. Technol. 2011, 2011, 1–7. [Google Scholar] [CrossRef]
- Clement-Nyns, K.; Haesen, E.; Driesen, J. The Impact of Charging Plug-In Hybrid Electric Vehicles on a Residential Distribution Grid. IEEE Trans. Power Syst. 2009, 25, 371–380. [Google Scholar] [CrossRef] [Green Version]
- Saaty, T.L. Decision making with the analytic hierarchy process. Int. J. Serv. Sci. 2008, 1, 83. [Google Scholar] [CrossRef] [Green Version]
- Haq, A.N.; Kannan, G. Fuzzy analytical hierarchy process for evaluating and selecting a vendor in a supply chain model. Int. J. Adv. Manuf. Technol. 2005, 29, 826–835. [Google Scholar] [CrossRef]
- Huang, C.-C.; Chu, P.-Y.; Chiang, Y.-H. A fuzzy AHP application in government-sponsored R&D project selection. Omega 2008, 36, 1038–1052. [Google Scholar] [CrossRef]
- Pan, N.-F. Fuzzy AHP approach for selecting the suitable bridge construction method. Autom. Constr. 2008, 17, 958–965. [Google Scholar] [CrossRef]
- Güngör, Z.; Serhadlıoğlu, G.; Kesen, S.E. A fuzzy AHP approach to personnel selection problem. Appl. Soft Comput. 2009, 9, 641–646. [Google Scholar] [CrossRef]
- Alosaimi, W.; Ansari, T.J.; Alharbi, A.; Alyami, H.; Seh, A.; Pandey, A.; Agrawal, A.; Khan, R. Evaluating the Impact of Different Symmetrical Models of Ambient Assisted Living Systems. Symmetry 2021, 13, 450. [Google Scholar] [CrossRef]
- Ansari, T.J.; Al-Zahrani, F.A.; Pandey, D.; Agrawal, A. A fuzzy TOPSIS based analysis toward selection of effective security requirements engineering approach for trustworthy healthcare software development. BMC Med. Inform. Decis. Mak. 2020, 20, 1–13. [Google Scholar] [CrossRef]
- Kumar, R.; Alenezi, M.; Ansari, M.T.J.; Gupta, B.; Agrawal, A.; Khan, R. Evaluating the Impact of Malware Analysis Techniques for Securing Web Applications through a Decision-Making Framework under Fuzzy Environment. Int. J. Intell. Eng. Syst. 2020, 13, 94–109. [Google Scholar] [CrossRef]
- Attaallah, A.; Ahmad, M.; Ansari, T.J.; Pandey, A.K.; Kumar, R.; Khan, R.A. Device Security Assessment of Internet of Healthcare Things. Intell. Autom. Soft Comput. 2021, 27, 593–603. [Google Scholar] [CrossRef]
- Kumar, R.; Ansari, M.T.J.; Baz, A.; Alhakami, H.; Agrawal, A.; Khan, R.A. A Multi-Perspective Benchmarking Framework for Estimating Usable-Security of Hospital Management System Software Based on Fuzzy Logic, ANP and TOPSIS Methods. KSII Trans. Internet Inf. Syst. 2021, 15, 240–263. [Google Scholar]
- Zarour, M.; Ansari, T.J.; Alenezi, M.; Sarkar, A.K.; Faizan, M.; Agrawal, A.; Kumar, R.; Khan, R.A. Evaluating the Impact of Blockchain Models for Secure and Trustworthy Electronic Healthcare Records. IEEE Access 2020, 8, 157959–157973. [Google Scholar] [CrossRef]
- Viola, F. Electric Vehicles and Psychology. Sustainability 2021, 13, 719. [Google Scholar] [CrossRef]
- Zadeh, L.A. Fuzzy sets as a basis for a theory of possibility. Fuzzy Sets Syst. 1978, 1, 3–28. [Google Scholar] [CrossRef]
- Klir, G.J. From Classical Mathematics to Fuzzy Mathematics: Emergence of a New Paradigm for Theoretical Science. In Fuzzy Logic in Chemistry; Elsevier: Amsterdam, The Netherlands, 1997; pp. 31–63. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| S1 | S2 | S3 | S4 | |
|---|---|---|---|---|
| S1 | 1.000000, 1.000000, 1.000000 | 1.750254, 2.345258, 3.036563 | 1.485854, 1.956375, 2.526873 | 1.129628, 1.555351, 1.989625 |
| S2 | - | 1.000000, 1.000000, 1.000000 | 0.576528, 0.786562, 1.168524 | 0.565263, 0.728568, 0.969954 |
| S3 | - | - | 1.000000, 1.000000, 1.000000 | 0.628656, 0.816575, 1.075846 |
| S4 | - | - | - | 1.000000, 1.000000, 1.000000 |
| S11 | S12 | S13 | |
|---|---|---|---|
| S11 | 1.000000, 1.000000, 1.000000 | 0.237552, 0.287963, 0.367526 | 0.342154, 0.447785, 0.824763 |
| S12 | - | 1.000000, 1.000000, 1.000000 | 0.661454, 1.172563, 1.693686 |
| S13 | - | - | 1.000000, 1.000000, 1.000000 |
| S21 | S22 | S23 | S24 | |
|---|---|---|---|---|
| S21 | 1.000000, 1.000000, 1.000000 | 0.694154, 0.895356, 1.112485 | 0.234596, 0.287864, 0.364168 | 0.711256, 0.954163, 1.351257 |
| S22 | - | 1.000000, 1.000000, 1.000000 | 0.493154, 0.642362, 1.241435 | 0.271354, 0.351565, 0.521635 |
| S23 | - | - | 1.000000, 1.000000, 1.000000 | 1.085484, 1.329762, 1.558235 |
| S24 | - | - | - | 1.000000, 1.000000, 1.000000 |
| S31 | S32 | S33 | |
|---|---|---|---|
| S31 | 1.000000, 1.000000, 1.000000 | 0.665365, 1.172384, 1.697465 | 1.157663, 1.447254, 1.704365 |
| S32 | - | 1.000000, 1.000000, 1.000000 | 1.007762, 1.524765, 1.934368 |
| S33 | - | - | 1.000000, 1.000000, 1.000000 |
| F41 | F42 | F43 | |
|---|---|---|---|
| S41 | 1.000000, 1.000000, 1.000000 | 1.197856, 1.588385, 2.156465 | 0.491541, 0.642285, 1.009958 |
| S42 | - | 1.000000, 1.000000, 1.000000 | 0.224165, 0.295684, 0.427969 |
| S43 | - | - | 1.000000, 1.000000, 1.000000 |
| S1 | S2 | S3 | S4 | Weights | |
|---|---|---|---|---|---|
| S1 | 1.000000 | 2.372530 | 1.981590 | 1.556640 | 0.392511 |
| S2 | 0.421550 | 1.000000 | 0.824630 | 0.744770 | 0.152321 |
| S3 | 0.504560 | 1.213520 | 1.000000 | 0.835090 | 0.202531 |
| S4 | 0.642650 | 1.342880 | 1.203550 | 1.000000 | 0.252637 |
| S11 | S12 | S13 | Weights | |
|---|---|---|---|---|
| S11 | 1.000000 | 1.173540 | 0.494564 | 0.275854 |
| S12 | 0.852550 | 1.000000 | 1.172547 | 0.328627 |
| S13 | 2.024340 | 0.853545 | 1.000000 | 0.395519 |
| S21 | S22 | S23 | S24 | Weights | |
|---|---|---|---|---|---|
| S21 | 1.000000 | 0.892654 | 1.173554 | 0.994547 | 0.246313 |
| S22 | 1.121242 | 1.000000 | 0.691526 | 0.372546 | 0.182575 |
| S23 | 0.852562 | 1.447256 | 1.000000 | 1.298541 | 0.272112 |
| S24 | 1.006624 | 2.688354 | 0.770435 | 1.000000 | 0.299000 |
| S31 | S32 | S33 | Weights | |
|---|---|---|---|---|
| S31 | 1.000000 | 1.172541 | 1.363652 | 0.382000 |
| S32 | 0.853345 | 1.000000 | 1.491224 | 0.353026 |
| S33 | 0.733754 | 0.670725 | 1.000000 | 0.255047 |
| S41 | S42 | S43 | Weights | |
|---|---|---|---|---|
| S41 | 1.000000 | 1.633244 | 0.691844 | 0.3259211 |
| S42 | 0.612477 | 1.000000 | 0.303457 | 0.2731254 |
| S43 | 1.447247 | 3.300347 | 1.000000 | 0.3112540 |
| Level 1 Methods | Local Weights of Level 1 | Level 2 Methods | Local Weights of Level 2 | Overall Weights | Overall Ranks |
|---|---|---|---|---|---|
| S1 | 0.392511 | S11 | 0.275854 | 0.108276 | 3 |
| S12 | 0.328627 | 0.128990 | 2 | ||
| S13 | 0.395519 | 0.155246 | 1 | ||
| S2 | 0.152321 | S21 | 0.246313 | 0.037519 | 12 |
| S22 | 0.182575 | 0.027810 | 13 | ||
| S23 | 0.272112 | 0.041448 | 11 | ||
| S24 | 0.299000 | 0.045544 | 10 | ||
| S3 | 0.202531 | S31 | 0.382000 | 0.077367 | 6 |
| S32 | 0.353026 | 0.071500 | 7 | ||
| S33 | 0.255047 | 0.051655 | 9 | ||
| S4 | 0.252637 | S41 | 0.325921 | 0.082340 | 4 |
| S42 | 0.273125 | 0.069000 | 8 | ||
| S43 | 0.311254 | 0.078634 | 5 |
| T1 | T2 | T3 | T4 | T5 | |
|---|---|---|---|---|---|
| S11 | 5.3600, 7.3006, 8.7300 | 5.5500, 7.5500, 8.9100 | 0.6400, 2.2700, 4.2700 | 5.3600, 7.3600, 8.7300 | 4.1800, 6.0900, 7.6400 |
| S12 | 3.7300, 5.5500, 7.2700 | 4.4500, 6.4500, 8.1800 | 1.6400, 3.5500, 5.5500 | 3.5500, 5.5500, 7.3600 | 5.0000, 7.0000, 8.4500 |
| S13 | 2.3600, 4.2700, 6.2700 | 5.3600, 7.3006, 8.7300 | 5.5500, 7.5500, 8.9100 | 0.6400, 2.2700, 4.2700 | 5.3600, 7.3600, 8.7300 |
| S21 | 4.8200, 6.8200, 8.5500 | 3.7300, 5.5500, 7.2700 | 4.4500, 6.4500, 8.1800 | 1.6400, 3.5500, 5.5500 | 3.5500, 5.5500, 7.3600 |
| S22 | 5.5500, 7.5005, 9.2700 | 2.3600, 4.2700, 6.2700 | 2.4500, 4.2700, 6.2700 | 1.3600, 3.3600, 5.3600 | 4.4500, 6.4500, 8.1800 |
| S23 | 4.2700, 6.2700, 8.1800 | 4.8200, 6.8200, 8.5500 | 4.6400, 6.6400, 8.5500 | 0.8200, 2.6400, 4.6400 | 4.4500, 6.4500, 8.2700 |
| S24 | 5.3600, 7.3006, 8.7300 | 5.5500, 7.5500, 8.9100 | 0.6400, 2.2700, 4.2700 | 5.3600, 7.3600, 8.7300 | 5.7300, 7.7300, 9.2700 |
| S31 | 3.7300, 5.5500, 7.2700 | 5.3600, 7.3006, 8.7300 | 5.5500, 7.5500, 8.9100 | 0.6400, 2.2700, 4.2700 | 5.3600, 7.3600, 8.7300 |
| S32 | 2.3600, 4.2700, 6.2700 | 3.7300, 5.5500, 7.2700 | 4.4500, 6.4500, 8.1800 | 1.6400, 3.5500, 5.5500 | 3.5500, 5.5500, 7.3600 |
| S33 | 5.3600, 7.3006, 8.7300 | 5.5500, 7.5500, 8.9100 | 0.6400, 2.2700, 4.2700 | 5.3600, 7.3600, 8.7300 | 4.4500, 6.4500, 8.1800 |
| S41 | 3.7300, 5.5500, 7.2700 | 4.4500, 6.4500, 8.1800 | 1.6400, 3.5500, 5.5500 | 3.5500, 5.5500, 7.3600 | 4.4500, 6.4500, 8.2700 |
| S42 | 2.3600, 4.2700, 6.2700 | 2.4500, 4.2700, 6.2700 | 1.3600, 3.3600, 5.3600 | 4.4500, 6.4500, 8.1800 | 5.7300, 7.7300, 9.2700 |
| S43 | 4.8200, 6.8200, 8.5500 | 4.6400, 6.6400, 8.5500 | 0.8200, 2.6400, 4.6400 | 4.4500, 6.4500, 8.2700 | 5.1800, 7.1800, 8.8200 |
| T1 | T2 | T3 | T4 | T5 | |
|---|---|---|---|---|---|
| S11 | 0.3800, 0.6000, 0.8000 | 0.5400, 0.7500, 0.9200 | 0.5200, 0.7400, 0.9300 | 0.4200, 0.6900, 0.9900 | 0.5200, 0.7400, 0.9400 |
| S12 | 0.5200, 0.7400, 0.9400 | 0.3800, 0.6000, 0.8000 | 0.5400, 0.7500, 0.9200 | 0.5200, 0.7400, 0.9300 | 0.4200, 0.6900, 0.9900 |
| S13 | 0.3800, 0.6000, 0.8000 | 0.5200, 0.7400, 0.9400 | 0.5400, 0.7500, 0.9200 | 0.5200, 0.7400, 0.9200 | 0.2000, 0.4700, 0.7700 |
| S21 | 0.3800, 0.6000, 0.8000 | 0.5400, 0.7500, 0.9200 | 0.5200, 0.7400, 0.9300 | 0.4200, 0.6900, 0.9900 | 0.5400, 0.7500, 0.9400 |
| S22 | 0.5200, 0.7400, 0.9400 | 0.3800, 0.6000, 0.8000 | 0.5400, 0.7500, 0.9200 | 0.5200, 0.7400, 0.9300 | 0.4200, 0.6900, 0.9900 |
| S23 | 0.3800, 0.6000, 0.8000 | 0.5200, 0.7400, 0.9400 | 0.5400, 0.7500, 0.9200 | 0.5200, 0.7400, 0.9200 | 0.2000, 0.4700, 0.7700 |
| S24 | 0.3800, 0.6000, 0.8000 | 0.5400, 0.7500, 0.9200 | 0.5200, 0.7400, 0.9300 | 0.4200, 0.6900, 0.9900 | 0.5400, 0.7500, 0.9400 |
| S31 | 0.5200, 0.7400, 0.9400 | 0.3800, 0.6000, 0.8000 | 0.5400, 0.7500, 0.9200 | 0.5200, 0.7400, 0.9300 | 0.4200, 0.6900, 0.9900 |
| S32 | 0.3800, 0.6000, 0.8000 | 0.5200, 0.7400, 0.9400 | 0.5400, 0.7500, 0.9200 | 0.5200, 0.7400, 0.9200 | 0.2000, 0.4700, 0.7700 |
| S33 | 0.3800, 0.6000, 0.8000 | 0.5400, 0.7500, 0.9200 | 0.5200, 0.7400, 0.9300 | 0.4200, 0.6900, 0.9900 | 0.5400, 0.7500, 0.9400 |
| S41 | 0.5200, 0.7400, 0.9400 | 0.5400, 0.7500, 0.9200 | 0.3800, 0.6000, 0.8000 | 0.5400, 0.7500, 0.9200 | 0.5200, 0.7400, 0.9300 |
| S42 | 0.3800, 0.6000, 0.8000 | 0.3500, 0.5800, 0.8100 | 0.5200, 0.7400, 0.9400 | 0.5400, 0.7500, 0.9200 | 0.5200, 0.7400, 0.9200 |
| S43 | 0.5200, 0.7400, 0.9200 | 0.4600, 0.6700, 0.8600 | 0.3800, 0.6000, 0.8000 | 0.3500, 0.5800, 0.8100 | 0.4200, 0.6900, 0.9900 |
| T1 | T2 | T3 | T4 | T5 | |
|---|---|---|---|---|---|
| S11 | 0.00000, 0.00200, 0.00900 | 0.00200, 0.00700, 0.02200 | 0.00200, 0.00700, 0.02400 | 0.00100, 0.00500, 0.01800 | 0.00300, 0.01100, 0.03600 |
| S12 | 0.00300, 0.01200, 0.04100 | 0.00000, 0.00200, 0.00900 | 0.00200, 0.00700, 0.02200 | 0.00200, 0.00700, 0.02400 | 0.00100, 0.00500, 0.01800 |
| S13 | 0.00300, 0.01200, 0.04200 | 0.00300, 0.01200, 0.04100 | 0.00300, 0.01200, 0.04100 | 0.00500, 0.01600, 0.04800 | 0.00500, 0.01600, 0.04900 |
| S21 | 0.00000, 0.00200, 0.00900 | 0.00200, 0.00700, 0.02200 | 0.00200, 0.00700, 0.02400 | 0.00100, 0.00500, 0.01800 | 0.00200, 0.00900, 0.03800 |
| S22 | 0.00300, 0.01200, 0.04100 | 0.00000, 0.00200, 0.00900 | 0.00200, 0.00700, 0.02200 | 0.00200, 0.00700, 0.02400 | 0.00100, 0.00500, 0.01800 |
| S23 | 0.00300, 0.01200, 0.04200 | 0.00300, 0.01200, 0.04100 | 0.00300, 0.01200, 0.04100 | 0.00500, 0.01600, 0.04800 | 0.00500, 0.01600, 0.04900 |
| S24 | 0.00000, 0.00200, 0.00900 | 0.00000, 0.00200, 0.00900 | 0.00200, 0.00700, 0.02200 | 0.00200, 0.00700, 0.02400 | 0.00100, 0.00500, 0.01800 |
| S31 | 0.00300, 0.01200, 0.04100 | 0.00300, 0.01200, 0.04100 | 0.00300, 0.01200, 0.04100 | 0.00500, 0.01600, 0.04800 | 0.00500, 0.01600, 0.04900 |
| S32 | 0.00000, 0.00200, 0.00900 | 0.00000, 0.00200, 0.00900 | 0.00200, 0.00700, 0.02200 | 0.00200, 0.00700, 0.02400 | 0.00100, 0.00500, 0.01800 |
| S33 | 0.00300, 0.01200, 0.04100 | 0.00300, 0.01200, 0.04100 | 0.00300, 0.01200, 0.04100 | 0.00500, 0.01600, 0.04800 | 0.00500, 0.01600, 0.04900 |
| S41 | 0.00000, 0.00200, 0.00900 | 0.00200, 0.00700, 0.02200 | 0.00200, 0.00700, 0.02400 | 0.00100, 0.00500, 0.01800 | 0.00200, 0.00900, 0.03800 |
| S42 | 0.00300, 0.01200, 0.04100 | 0.00300, 0.01200, 0.04100 | 0.00500, 0.01600, 0.04800 | 0.00500, 0.01600, 0.04900 | 0.00100, 0.00500, 0.01800 |
| S43 | 0.00300, 0.01200, 0.04200 | 0.00300, 0.01200, 0.04200 | 0.00200, 0.01000, 0.03700 | 0.00200, 0.00900, 0.03800 | 0.00100, 0.00500, 0.01800 |
| Alternatives | d+i | d−i | Gap Degree of CC+i | Satisfaction Degree of CC−i | |
|---|---|---|---|---|---|
| Alternative 1 | T1 | 0.0451540 | 0.0545250 | 0.6125450 | 0.38712741 |
| Alternative 2 | T2 | 0.0564570 | 0.0365260 | 0.3562560 | 0.64714356 |
| Alternative 3 | T3 | 0.0464570 | 0.0548740 | 0.5698570 | 0.44421424 |
| Alternative 4 | T4 | 0.0451270 | 0.0452450 | 0.5754820 | 0.43471445 |
| Alternative 5 | T5 | 0.0346570 | 0.0215470 | 0.5535680 | 0.45485126 |
| Methods/Alternatives | T1 | T2 | T3 | T4 | T5 |
|---|---|---|---|---|---|
| Fuzzy AHP-TOPSIS | 0.38712741 | 0.64714356 | 0.44421424 | 0.43471445 | 0.45485126 |
| Classical AHP-TOPSIS | 0.38547400 | 0.64528700 | 0.44542700 | 0.43654800 | 0.46358700 |
| Experiments | Weights/Alternatives | T1 | T2 | T3 | T4 | T5 | |
|---|---|---|---|---|---|---|---|
| Experiment-0 | Original Weights | Satisfaction Degree (CC−i) | 0.38712741 | 0.64714356 | 0.44421424 | 0.43471445 | 0.45485126 |
| Experiment-1 | S11 | 0.43576400 | 0.60004500 | 0.48962700 | 0.47718100 | 0.49393900 | |
| Experiment-2 | S12 | 0.47776400 | 0.71004500 | 0.52912700 | 0.52018000 | 0.53493900 | |
| Experiment-3 | S13 | 0.32806400 | 0.55804500 | 0.39112700 | 0.34048200 | 0.38563900 | |
| Experiment-4 | S21 | 0.35976400 | 0.54044500 | 0.42412700 | 0.37798000 | 0.41803900 | |
| Experiment-5 | S22 | 0.32916400 | 0.55554500 | 0.39612700 | 0.36368000 | 0.38383900 | |
| Experiment-6 | S23 | 0.36076400 | 0.59104500 | 0.42712700 | 0.39817800 | 0.41783900 | |
| Experiment-7 | S24 | 0.32916400 | 0.55554500 | 0.39612700 | 0.36368000 | 0.38383900 | |
| Experiment-8 | S31 | 0.32916400 | 0.55554500 | 0.39612700 | 0.36368000 | 0.38383900 | |
| Experiment-9 | S32 | 0.44446400 | 0.67604500 | 0.49912700 | 0.48167900 | 0.49743900 | |
| Experiment-10 | S33 | 0.36076400 | 0.59104500 | 0.42712700 | 0.39817800 | 0.41783900 | |
| Experiment-11 | S41 | 0.32916400 | 0.55554500 | 0.39612700 | 0.36368000 | 0.38383900 | |
| Experiment-12 | S42 | 0.32176400 | 0.56004500 | 0.38362700 | 0.36018000 | 0.38293900 | |
| Experiment-13 | S43 | 0.47816400 | 0.72654500 | 0.54062700 | 0.52768100 | 0.54343900 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alosaimi, W.; Ansari, M.T.J.; Alharbi, A.; Alyami, H.; Ali, S.; Agrawal, A.; Khan, R.A. Toward a Unified Model Approach for Evaluating Different Electric Vehicles. Energies 2021, 14, 6120. https://doi.org/10.3390/en14196120
Alosaimi W, Ansari MTJ, Alharbi A, Alyami H, Ali S, Agrawal A, Khan RA. Toward a Unified Model Approach for Evaluating Different Electric Vehicles. Energies. 2021; 14(19):6120. https://doi.org/10.3390/en14196120
Chicago/Turabian StyleAlosaimi, Wael, Md Tarique Jamal Ansari, Abdullah Alharbi, Hashem Alyami, Saquib Ali, Alka Agrawal, and Raees Ahmad Khan. 2021. "Toward a Unified Model Approach for Evaluating Different Electric Vehicles" Energies 14, no. 19: 6120. https://doi.org/10.3390/en14196120