1. Introduction
With the current environmental deterioration and energy crisis, developing clean energy has become an inevitable choice for human sustainable development. Many countries and companies have conducted extensive research and development dedicated to the creation of new alternative and renewable energy sources and technologies. Among these, hydrogen energy is considered to be the most promising green and clean alternative energy for the future. Compared with other alternative energy sources, it has the advantages of low environmental pollution and high efficiency [
1].
The proton exchange membrane fuel cell (PEMFC) has become an ideal power source due to its zero emission, high power density, and fast start-up speed, which has attracted extensive attention and has become a research hotspot in various countries. To date, PEMFC has been successfully applied in various operations such as stationary power generation and vehicle power supply. As a vehicle power source in particular, PEMFC has shown great potential and is considered to be an important direction for the sustainable development of the automotive industry in the future.
The vehicle fuel cell hybrid power system is generally composed of a fuel cell system, energy storage device, power electronic converter, and energy management system. Among them, the energy management strategy is one of the key technologies of the hybrid system, which determines the performance of the system. Generally, it can be divided into two types: rule-based and optimization-based.
The rule-based energy management strategy is to allocate energy according to the working characteristics of each subsystem and engineering experience, mainly including deterministic rules and fuzzy logic control. The optimization-based energy management strategy takes the system energy consumption or life durability as the optimization objective for optimal control. It can be divided into two categories: global optimization algorithms such as dynamic programming (DP), and convex optimization and instantaneous optimization algorithms such as equivalent consumption minimization strategy (ECMS) and Pontryagin’s minimum principle (PMP).
Zhou et al. [
2] used the adaptive online learning Markov method to predict the future vehicle speed, and designed the reference Stata of Charge (
SOC) to implement predictive control according to the prediction results. Liu et al. [
3] used nonlinear autoregressive neural networks (NARANN) and performed a dynamic programming moving window method to iteratively update the prediction model, which could provide stable demand power prediction for complex and changeable driving environments. Nie et al. [
4] used model predictive control (MPC) based on the fast projection gradient method to comprehensively predict vehicle speed and real-time vehicle conditions, as well as road slope and resistance, to achieve fast and real-time speed sequence planning, but the real-time vehicle conditions need the support of the Internet of vehicles.
Li, X.F [
5] adopts a model prediction algorithm to perform instantaneous predictive control for torque distribution or power demand according to driver’s intention. Although real-time optimization can be achieved, its control effect is based on the selection of the initial state and cannot achieve global optimization. Zhou [
6] proposes a multi-mode energy management strategy for fuel cell hybrid vehicles. It consists of a Markov driving pattern recognizer and a multimodal MPC controller. The Markov recognizer classifies driving segments measured in real time into one of three predefined patterns and the MPC control parameters are selected and adjusted offline according to the pattern recognition results. In the next layer, local optimization is performed based on the selected control parameters and velocity predictions.
Xu, L, et al. [
7] establishes an equivalent fuel consumption model of a fuel cell hybrid vehicle, seeking the lowest instantaneous equivalent fuel consumption of the system. Ref. [
8] proposes a state machine control strategy based on droop control, which improves the operational reliability of the fuel cell hybrid tram. Hemi [
9] proposes an energy optimization strategy based on Markov chain and PMP. First, the Markov probability transition model is used to predict the load demand, and then the PMP algorithm is used to solve the problem of minimum equivalent hydrogen consumption.
The previous energy management strategies are generally based on optimization under the global operating conditions. However, the vehicle driving conditions under actual road conditions are uncertain and time-varying, so it is generally impossible to obtain the global operating conditions information in advance. If the velocity or power demand information of the next time period can be predicted in advance, it is of great significance for the system energy management system to optimize power allocation, and obtain better control effects. Therefore, this study develops a predictive control based on neural networks to predict the power demand for a period of time in the future, and then carry out global optimization in the prediction domain. Rolling prediction and optimization control will be used to achieve close to the global optimization. For the prediction model, the GRU neural network, which has the advantages of the LSTM neural network, but with a simpler structure, is selected for vehicle speed prediction. Then, Pontryagin’s minimum principle (PMP) method is utilized to optimize in the prediction domain.
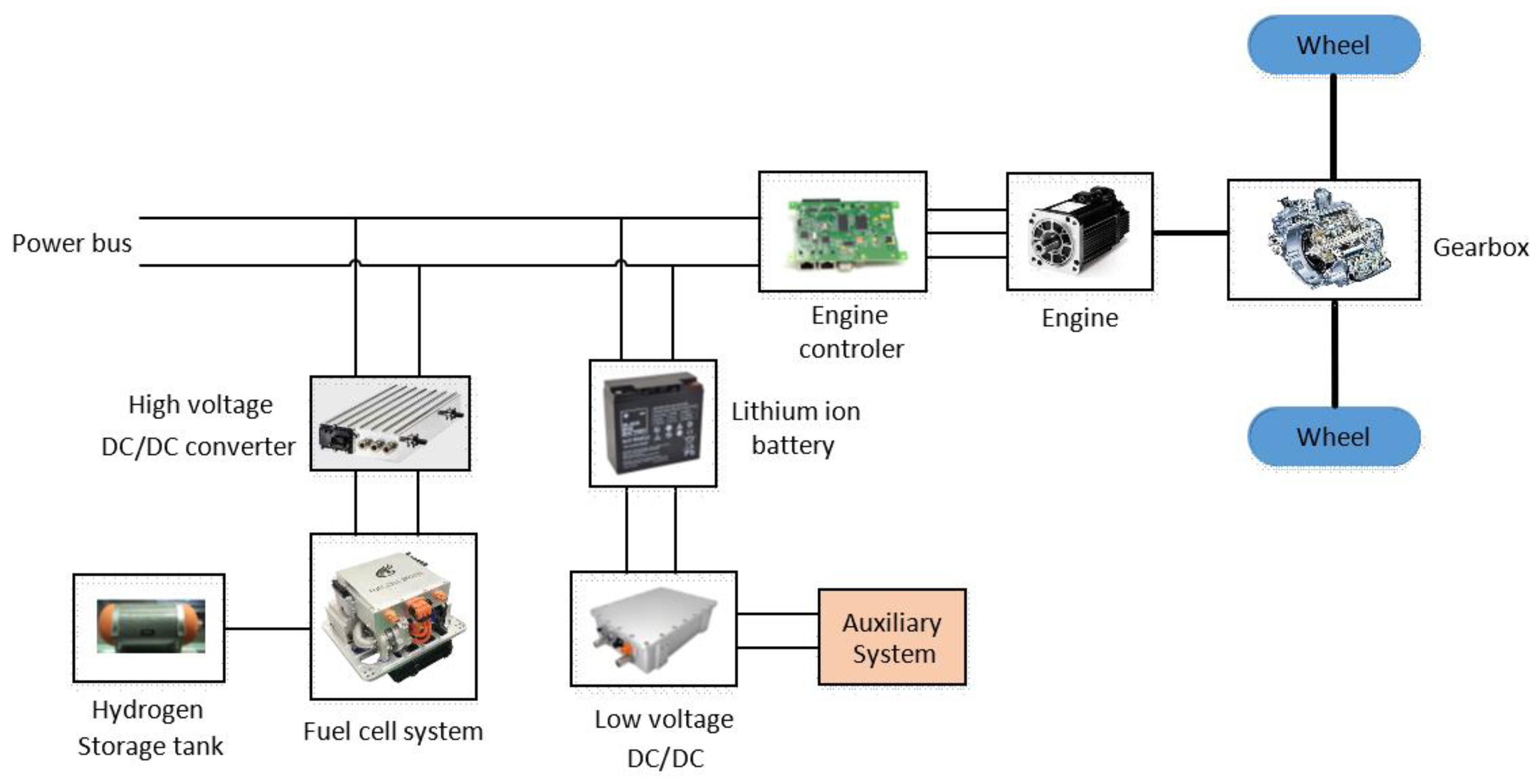
The main research content of this paper includes system modeling and the energy management strategy of a fuel cell hybrid system. The system structure of the fuel cell hybrid system comprises a hydrogen power generation system, battery pack, DC load (electric vehicle, etc.) and corresponding power electronic equipment. The simulation model of each device is established, and the working characteristics of each part are analyzed.
For the hybrid system, it is necessary to consider how to distribute the output power of the energy source to enable the vehicle to run stably and achieve economic and durability targets. The energy management strategy (EMS) controls the output power of the energy source in real time according to the current state of the system, and its control effect directly affects the overall performance of the hybrid system.
3. Energy Management Strategy
Fuel cell hybrid vehicles typically adopt a rule-based or optimized distribution strategy. The rule-based strategy is causal, but it does not guarantee the optimality of the control effect. Conversely, optimization-based solutions usually ensure optimal power distribution through mathematical optimization; however, they lead to a lack of causality and are difficult to implement online. Therefore, a challenge lies in how to develop an appropriate energy management strategy to seek a balance between optimal and real-time performance [
14].
In a sense, model predictive control (MPC) can be regarded as a compromise between instantaneous optimization and global optimization. The MPC algorithm estimates the upcoming power requirements in a finite time range and solves the optimal power allocation decision at each receding horizon. It can effectively reduce the amount of computation. Through rolling optimization, the actual control effect is close to the global optimal [
15].
This study adopts the idea of MPC by transforming the global optimal control problem of the whole driving cycle into a local optimal problem in the prediction domain, and then updating the next time domain by constantly rolling the optimization.
3.1. Model Predictive Control
The process of MPC energy management can be divided into three steps: state prediction, objective function solution, and optimal control action application. The model predictive control energy management strategy for optimal fuel economy is shown in
Figure 4.
By transforming the global optimization into a series of sub-optimizations, MPC can obtain the optimal local control law. A typical MPC-based energy management strategy consists of three steps [
11].
- (1)
State prediction
The prediction model is established, the vehicle speed is selected as the prediction quantity, and the future speed is predicted in the finite time domain at each sampling time. The driving demand power in the prediction domain is calculated.
- (2)
Optimization solution
The objective function and constraints can be expressed as:
S.t:
where,
is the prediction domain,
is the objective function at time
,
is the cost function, and
,
are the state variables and control variables.
The optimization problem in the preview horizon is solved according to the constraints, and then the control sequence is obtained:
where
represents the start time of the
kth prediction horizon, and
is the length of the prediction horizon.
- (3)
Optimal control action application
After solving the optimal control sequence in the prediction horizon , the first of the control sequences is applied to the controlled object.
- (4)
Rolling optimization
The above process rolls forward to form a closed-loop feedback control. It can overcome the uncertainty caused by interference, improve robustness, and make the actual control close to the optimal control [
16]. Repeat steps (1) to (4) until the driving cycle ends.
3.2. Velocity Prediction Based on GRU Neural Network
Due to the influence of the environment and other factors, vehicle speed is a highly time-varying and nonlinear process.
Speed prediction is generally divided into model-based methods and data-based methods. Data-driven methods use historical data to predict future vehicle speeds without predefining the parameter models, and they are more suitable for real vehicle driving processes with high randomness. Due to its strong nonlinear mapping capability, neural networks (NN) are the most popular data-driven method [
17]. Therefore, this approach can be used to describe the uncertain dynamic process of vehicle speed and establish a nonlinear input–output mapping model.
Vehicle speed information is a kind of time series information. The long short-term memory (LSTM) neural network has good memory and prediction ability for sequences with time series characteristics. While the LSTM model is widely used, there are also many problems, such as high complexity and large calculations. Therefore, we chose the simplified version of the LSTM, which is the gated recurrent unit (GRU). It has fewer parameters and is more concise than LSTM, but the prediction effect is comparable with LSTM, and can even exceed it in some applications.
In this study, a GRU based on recursive neural networks (RNN) is used for vehicle speed prediction. The RNN model structure allows the effective estimation of the future state through historical information, thus making it possible to explore the time relationship between discontinuous data [
18].
3.2.1. Principle of GRU Neural Network
The GRU belongs to a kind of RNN network, an improved and optimized neural network based on the LSTM network, which is a kind of recurrent neural network and can predict for time series. It has a faster convergence speed and has an accuracy close to that of LSTM [
19,
20]. It realizes controllable memory in time series and improves the problem of the insufficient long-term memory of RNN. There are only two gate structures in GRU, namely, update gate and reset gate. The specific structure is shown in
Figure 5.
In
Figure 5,
represents the sigmoid function, a nonlinear activation function that transforms data into values in the range of 0–1, and acts as a gated signal.
The activation function tanh is used to regulate the values flowing through the network so that the values are always limited between −1 and 1.
According to the network structure, for a GRU unit, reset gate
at the current time:
represents the weight from the last candidate value to the reset gate, and rep resents the weight from input value to the reset door.
The update gate is used to control the state information at the previous time to retained to current state, the gate value
:
represents the weight of the last candidate value to the update gate, and is the weight of the input value to the update gate.
Get the hidden state
:
is the weight from the last candidate value to the candidate value, is the weight from input value to candidate value.
Update the hidden status to get the current output:
From Equations (13)–(17), it can be seen that the GRU neural network needs to learn and train three weight parameters:, , and .
3.2.2. Construction of GRU Short-Term Speed Prediction Model
Considering the computational efficiency and accuracy, this topic chooses a neural network structure with one input layer, one hidden layer, and one output layer to construct a GRU neural network, and the learning rate is set to 0.02.
Figure 6 shows the schematic diagram of speed prediction based on the GRU neural network, including the input layer, hidden layer, and output layer.
The input to the neural network is historical velocity sequence ; The output is the predicted speed , and is the length of the prediction horizon. The sigmoid function and the function are selected as the activation functions of the hidden layer.
The time series velocity dataset is divided into training and test sets. The training of the GRU neural network is based on the back-propagation algorithm. It mainly includes the following steps:
- (1)
Use the constructed neural network to calculate the data received by the hidden layer, pass the result to the output layer, and output the result.
- (2)
Calculate the loss function, and use the back-propagation algorithm to update the weight coefficient of the hidden layer until the end of the training.
The output layer receives the calculation results of the hidden layer and outputs the predicted value.
The World light vehicle test cycle (WLTC) and China light-duty vehicle test cycle-passenger (CLTC) were selected, respectively. Seven driving cycles are used to train the network, and the other two to test the network performance; the prediction domain is set to 5 s.
The root mean square error (RMSE) is used to evaluate network performance:
is the predicted root mean square error for the ith prediction horizon (from s to s), is the predicted global average RMSE, and N is the length of the drive period.
The research object of this subject is a typical medium-sized electric car. Therefore, the speed data of typical urban working conditions are selected for training. The training and test results are shown in
Figure 7.
Figure 7 shows the predicted results under WLTC conditions. The predicted result and the actual velocity value show the same trend, reflecting the change trend of speed.
Different prediction horizons were tested in this work.
Table 3 shows the RMSE within the prediction horizon of 5, 10, 15, and 20 s for WLTC conditions. It can be seen that with the increase of the prediction time horizons, the RMSE gradually increases, which indicates that the prediction accuracy deteriorates with the increase of the prediction horizons.
3.3. Formulation of the Optimization Problem
The goal of the energy management strategy of this topic is to minimize the fuel consumption in each preview horizon, while at the same time reducing the SOC fluctuation of the battery. Based on Pontryagin’s minimum principle, the PMP optimization algorithm is adopted in the rolling horizon.
At time
k, the optimization objective in the rolling horizon can be expressed as:
where
represents the start time of the
kth prediction horizon,
is the predicted horizon length,
L is the instantaneous fuel consumption cost
is the
kth prediction horizon, and
is the fuel consumption rate.
When
SOC is selected as the state variable, the expression of the state equation can be obtained according to the equivalent circuit model of the battery:
where
is the open circuit voltage and
is the battery capacity.
The dynamic equation of the state variables can be described as follows:
The reference trajectory of the
SOC in the prediction horizon, for simplicity, is designed to fluctuate within a small range around the initial value; the range is set to
.
The fuel cell output power
is selected as the control quantity. The Hamiltonian function can be expressed as:
where
is a co-state variate.
According to the minimum principle, the necessary conditions for an optimal decision are:
At the same time, the system canonical equation should be satisfied:
Therefore, the optimal control quantity can be obtained according to the following equation:
When minimizing the Hamiltonian function in the
kth prediction domain, the boundary constraint of
SOC must be considered [
21].
In addition, the optimization problem of the system needs to be subject to the following system constraints:
Among them, , represent the minimum and maximum output power of the fuel cell, , represent the range of the battery’s discharge power, represents the battery’s maximum charging power, and and represent the boundary SOC of battery.
The control schematic diagram in this project is shown in
Figure 8. Firstly, the GRU prediction model is used to forecast the vehicle speed. Then, the optimal power allocation is solved for each receding horizon based on the PMP method.
3.4. Numerical Solution
As can be seen from the RMSE value in
Table 3, the prediction error increases with the increase of the prediction horizon. Considering the prediction accuracy and computational efficiency, the prediction horizon
is defined as 5 s, and the initial
SOC of the battery is 0.6. The upper and lower limits of the
SOC are set to 0.3 and 0.8, respectively.
The objective function within the prediction horizon is solved by the minimum principle. At each time, is obtained by Equation (29) is the optimal control quantity at that time.
The value of the co-state directly affects the performance of the optimal control. In this paper, the co-state value adopts the binary search method.
The process of the energy management strategy is as follows:
- (1)
Initialize co-state variable λ, battery’s SOC, and other variables.
- (2)
Forecast the speed sequence based on the GRU neural network model.
- (3)
Solve the optimal control in each time step in the prediction horizon according to the Hamiltonian function, and update the value of the state variable until the end of the prediction domain.
- (4)
Determine whether the control sequence satisfies the convergence condition. If not, adjust the initial value of λ according to the dichotomy method, and continue to update the initial co-state variable.
- (5)
Based on Step 3 and Step 4, obtain the optimal fuel cell output power and SOC sequence and choose the first element of the sequence.
- (6)
Repeat the above steps until all prediction domains meet the convergence conditions.
4. Results Analysis and Discussion
The proposed energy management control strategy is simulated under MATLAB/Simulink, with the strategy being evaluated under WLTC and CLTC conditions, respectively. The results are compared with the rule-based strategy and the minimum equivalent hydrogen consumption strategy (ECMS).
4.1. Simulation Results under WLTC Conditions
In
Figure 9, (a) is the test conditions, and (b) is the fuel cell output power under the three power splitting algorithms, which are identified with different colors: the red curve represents the fuel cell output power in the MPC-PMP strategy, the blue curve represents the fuel cell output power in the ECMS strategy, and the green curve represents fuel cell output power in the rule-based splitting strategy.
In
Figure 10, (a) shows the
SOC change curve of the lithium battery under three strategies, and (b) is the hydrogen consumption of the fuel cell under the three power distribution strategies. It can be seen that in a complete driving cycle, the hydrogen consumption under the strategy based on MPC-PMP is the lowest.
The specific fuel consumption and
SOC fluctuations are shown in
Table 4.
It can be seen from the figure that under the WLTC working conditions, the hydrogen consumption of MPC-PMP is the lowest. Under the ECMS algorithm, the battery’s SOC fluctuation is the smallest, but the hydrogen consumption is the highest.
Specifically, the fluctuation value of SOC is less than 0.1 under the three strategies. However, the difference of hydrogen consumption is obvious. In a driving cycle of 1800 s, the fuel consumption under the MPC-PMP strategy is reduced by 22.4% compared to the ECMS-based strategy, and is 10.3% lower than the rule-based strategy. Although the SOC fluctuation under the ECMS strategy is the smallest, its hydrogen consumption is relatively the largest, which may be because ECMS considers instantaneous optimization and does not consider it from the global perspective. The rules-based strategy falls between the MPC-PMP and ECMS strategies in terms of hydrogen consumption and SOC fluctuation.
4.2. Simulation Results under CLTC Conditions
In
Figure 11, (a) is the CLCT test driving cycle, and (b) is the fuel cell output power under the three power-splitting algorithms, which are identified with different colors. It can be seen that under these driving conditions, the power waveform based on MPC-PMP is similar to that of the ECMS strategy.
In
Figure 12, (a) shows the changing process of the battery
SOC under the three strategies, and (b) is the hydrogen consumption of the fuel cell under the three power distribution strategies. It can be seen that in a complete driving cycle, the hydrogen consumption under the MPC-PMP strategy is the lowest. The specific fuel consumption and
SOC fluctuations are shown in
Table 5.
As can be seen from the figure, under the CLTC conditions, the hydrogen consumption of the MPC-PMP algorithm is the lowest, and the fluctuation of the battery SOC in the whole process is also the lowest.
Under the three strategies, the SOC fluctuation value is less than 0.1. In an 1800 s drive cycle, the fuel consumption under the MPC-PMP strategy reduced by 3.01% compared to the ECMS strategy, and reduced by 13.12% compared to the rules-based strategy. Meanwhile, the SOC fluctuation under the MPC-PMP strategy is the smallest. Under these conditions, the hydrogen consumption and fluctuation of SOC is the largest based on the rule-based algorithm. Among the three algorithms, the hydrogen consumption and SOC fluctuation of the ECMS strategy are in the middle. It can be seen that different working conditions have a significant influence on the optimization effect.
The simulation results show that under two typical operating conditions, the SOC of the batteries with the three energy management strategies is kept in a relatively good range without overcharge and discharge. The hydrogen consumption based on the MPC-PMP algorithm is the lowest. It can also be seen that different driving conditions have a considerable influence on the optimization effect of the algorithm, and thus, the performance will be very different under different driving conditions. Therefore, there is no general algorithm. For different working conditions, different algorithms need to be selected according to the purpose.
5. Conclusions
The main purpose of this project is to improve the fuel economy of the vehicle fuel cell hybrid power system. In order to improve the real-time control performance under natural conditions, model predictive control was used for energy management. Firstly, the driving velocity was predicted based on the GRU neural network model, and the objective function in the prediction horizon was solved by the PMP algorithm.
Finally, the effectiveness of the control strategy was verified using simulation analysis, and this was compared with the rule-based energy management strategy and the minimum equivalent hydrogen consumption strategy. The simulation results show that the proposed strategy improves the fuel economy. Under the two typical working conditions of WLTC and CLTC, the hydrogen consumption of the algorithm is the lowest. It can also be seen that the performance of the energy management algorithm under different driving conditions varies significantly. For different working conditions, different algorithms need to be selected according to the purpose.
This project studies a real-time energy management strategy based on an MPC-PMP framework. The prediction model is based on the GRU neural network. The driving scenario is a medium-sized hybrid electric passenger vehicle in typical urban conditions. Firstly, the neural network prediction model is established through offline training, and then the real-time predictive control can be carried out for typical urban conditions. However, if it needs to work under any natural road conditions, online training is required, which places high demands on the computing performance of the onboard processor. In the future, other prediction models will be studied to obtain better generalization performance that can adapt to different driving conditions. This paper does not consider the optimization effect of fuel cell durability, which is also a direction to be studied in the near future.


 ,
, 












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}