Abstract
The frequency of power systems is very sensitive to load variations. Additionally, with the increased penetration of renewable energy sources in electrical grids, stabilizing the system frequency becomes more challenging. Therefore, Load Frequency Control (LFC) is used to keep the frequency within its acceptable limits. In this paper, an adaptive controller is proposed to enhance the system performance under load variations. Moreover, the proposed controller overcomes the disturbances resulting from the natural operation of the renewable energy sources such as Wave Energy Conversion System (WECS) and Photovoltaic (PV) system. The superiority of the proposed controller compared to the classical LFC schemes is that it has auto tuned parameters. The validation of the proposed controller is carried out through four case studies. The first case study is dedicated to a two-area LFC system under load variations. The WECS is considered as a disturbance for the second case study. Moreover, to demonstrate the superiority of the proposed controller, the dynamic performance is compared with previous work based on an optimized controller in the third case study. Finally in the fourth case study, a sensitivity analysis is carried out through parameters variations in the nonlinear PV-thermal hybrid system. The novel application of the adaptive controller into the LFC leads to enhance the system performance under disturbance of different sources of renewable energy. Moreover, a robustness test is presented to validate the reliability of the proposed controller.
1. Introduction
Load Frequency Control (LFC) is an important issue in stabilizing the system frequency under different types of disturbance. A two-area system with a controller in each area to enhance the performance in the transient duration is commonly used in the previous literature [1]. The Area Control Error (ACE) is an index to measure the deviation in frequency and power flow through a tie line. The ACE can be presented as in Equation (1) for area number i for several areas system.
where ΔPij is the power flow through tie line between areas number i and j and Bi is the frequency biasing coefficient of area number i. Several controllers are presented in the literature to enhance the transient performance of the electrical power system through optimization algorithms. Proportional-Integral (PI) controller and Integral (I) controller are used in [1]. Tunning of controller parameters is carried out by Hybrid Particle Swarm Optimization to minimize the performance index (μ) given by,
where α, β, and γ are constants and and are changing in area i frequency, change in area ii frequency, and changing in tie power, respectively. The results show that PI succeeded in enhancing the system damping. The adaptive neuro-fuzzy inference system is applied to the three areas system, and it has a fast response to keep the frequency at its nominal value [2]. The authors of [3] show the superiority of the Fuzzy logic controller over the classical PI in terms of fast response. Fuzzy logic controller is also used in [4], where the automatic generation control (AGC) includes superconducting magnetic energy storage. The results illustrate the capability of the Fuzzy controller to damp system oscillations. The PID controller designed by maximum peak resonance specification is presented in [5] which is superior to the classical controller in enhancing AGC performance.
The authors of [6] compared between fractional order PID and integral order PID to enhance the AGC performance in a two-area system. The fractional order PID had better performance than the integral order PID. Integral-double derivative offers faster dynamic response than several classical controllers used for AGC in multi-area systems [7]. Imperialist competitive algorithm (ICA) is utilized to optimize the parameters of the robust PID controller, and the results show its superiority compared to classical PI controller optimized by Genetic Algorithm (GA) and neural network [8]. Artificial neural networks ANN are applied for four-area systems and succeed in improving the AGC performance as presented in [9]. The GA based controller is used to enhance the performance of AGC [10]. The authors of [11] used Bacteria Foraging optimization algorithm to optimized PI controller to enhance the LFC in a two-area system. The results show that the Bacteria Foraging optimization algorithm had better performance than GA used for optimization of PI parameters. Fuzzy logic based Integral (I) controller are proposed in [12] and compared with classical PI controller. Results showed that the fuzzy logic based Integral (I) controller has lower overshoot and settling time than the classical PI controller. Particle swarm optimization (PSO), harmony search algorithm, cuttlefish algorithm, and emperor penguin optimizer are proposed to optimize parameters of the PI controller in an MPPT system [13,14,15,16]. The results show that these techniques succeed in improving the transient performance of the area frequency and the power in the tie line. The authors of [17] used an optimal output feedback method to enhance the dynamics of the AGC for two-area systems. The method succeeds in minimizing the performance index. Genetic fuzzy gain scheduling controller is presented in [18] and succeeded in enhancing the AGC performance of two-area systems. The authors of [19] enhanced the AGC performance of two-area systems by using a differential evolution-based tilt integral derivative controller with a filter and compared its performance with several optimization techniques. Adaptive weighted particle swarm based multi-objective PID controller is presented in [20] and results showed that this method is very fast compared with GA and PSO techniques. The authors of [21] used differential evolution algorithm to enhance AGC with considering nonlinearity as governor dead band. A more adequate technique based on expanding the transfer function of the controller using Laurent series is carried out in [22] to enhance the performance of a single-area AGC. The Firefly Algorithm proved its superiority to different optimization techniques in enhancing the controller performance of two-area AGC systems [23]. Gravitational search algorithm and differential evolution are used for the AGC of two-area systems [24,25]. The transient response of the three-area AGC system is improved by using the PSO based Multi-stage Fuzzy logic PID controller [26]. Kharitonov’s theorem and stability boundary locus are used for controller design of AGC to damp the system oscillations [27]. Furthermore, the PI controller is used for the AGC system of photovoltaic and thermal generators [28]. In addition, the PID controller is used for the AGC with AC-DC tie line [29]. It is shown that the tilt integral derivative is superior to classical controllers [30]. Moreover, the flower pollination based fractional order controller is used to enhance the LFC [31]. Furthermore, other techniques such as PID based on double-derivative controllers, BAT algorithm based cascaded PD and PID controllers, Cuckoo search based two degree of freedom controller, and Proportional-Integral-Derivative and Acceleration (PIDA) controller optimized by Teaching-Learning-Based-Optimizer (TLBO) are used for LFC enhancing [32,33]. The authors [34] proposed an approach based on reference Offset Governor method to enhance the load frequency control system. While, the authors [35] proposed a PI controller tuned using a genetic algorithm to enhance the load frequency control system performance. Moreover, the authors of [36] proved that the DGs have an important role in enhancing the power system performance.
In most of the literature, although control strategies succeeded in enhancing the LFC system performance, the controller needs to be readjusted if the disturbance is changed. Moreover, disturbances caused by the intermittent nature of renewable energy such as wave energy are not considered, even with its high penetration nowadays. Furthermore, most of the presented LFC systems in the literature depended on off-line optimization techniques which cannot follow the disturbance due to the load variations. Moreover, optimization algorithms experience a long time of implementation. To overcome the aforementioned problems, this paper presented an LFC system based on an adaptive controller. The proposed method is examined with the Wave Energy Conversion System (WECS) under load variation and wave disturbances. The dynamic performance of the proposed controller is compared with previous work [32] where optimization techniques are applied for LFC of the same system model utilized in this paper. Finally, the reliability of the system is examined through the hybrid PV-thermal nonlinear system.
2. System under Study
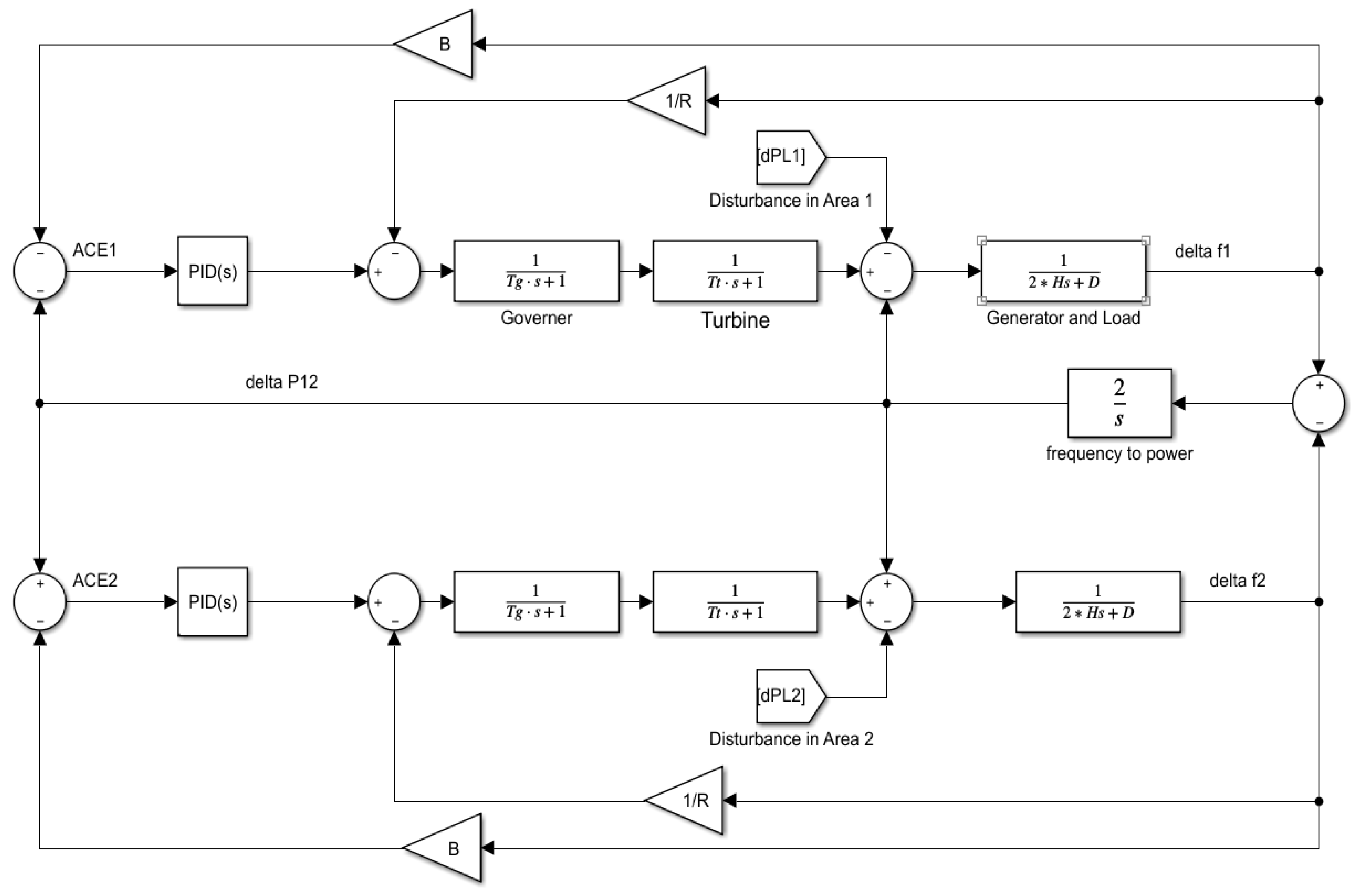
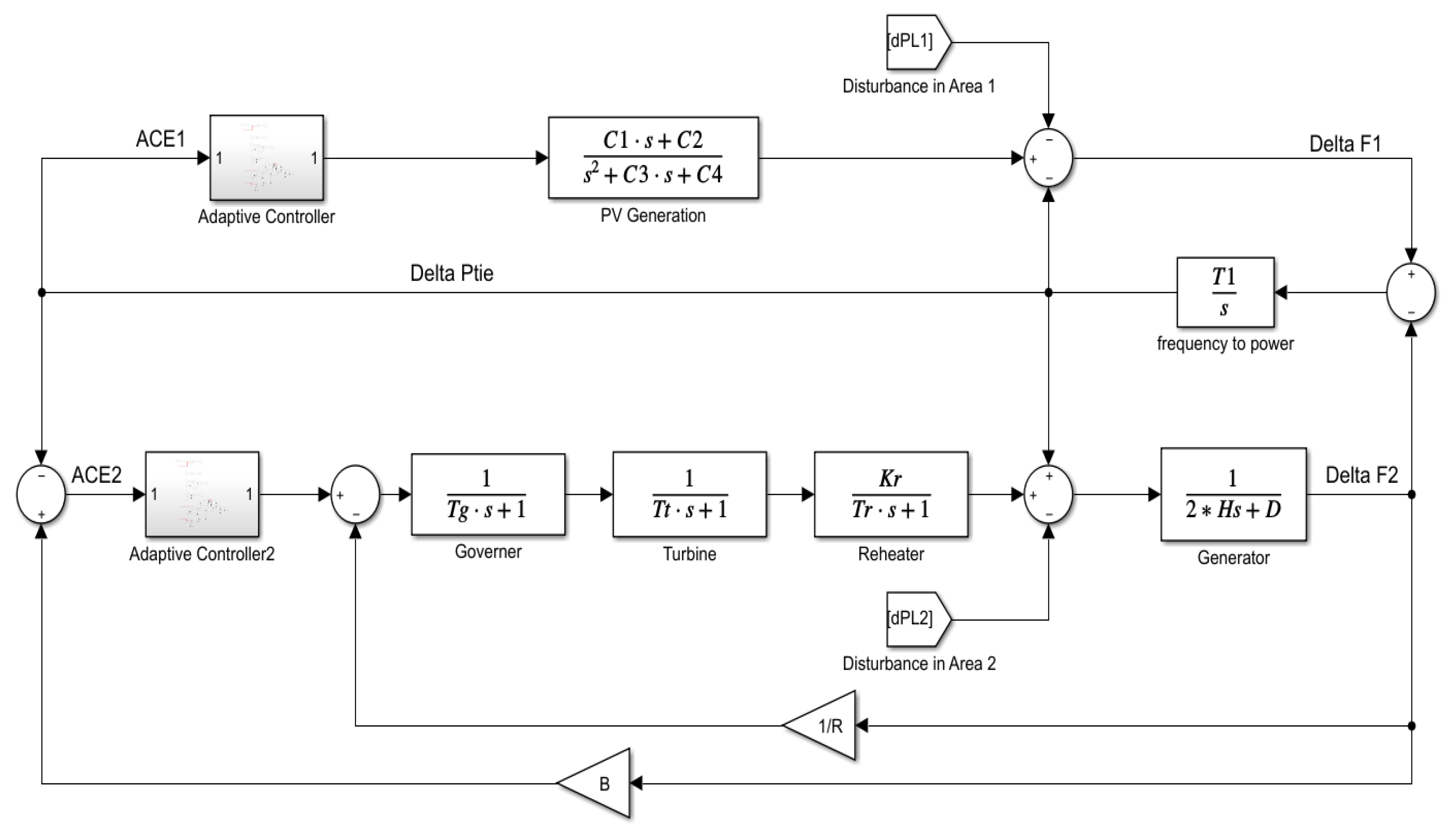
The model of the two-area system with a tie line between the areas under study is shown in Figure 1 [32]. The area controller input is the error in each area. The controller in each area operates to keep the system in stable transient performance under any disturbances.
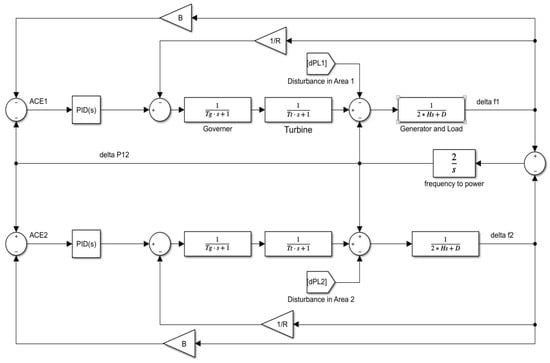
Figure 1.
Block diagram of the system model under study.
3. Load Frequency Control
The output signal from the classical PI controller is the summation of the error multiplied by the proportional gain and the integration of this error multiplied by the integral gain. The classical PI controller suffers from major drawbacks, such as the values of both integral and proportional gains are fixed. Under variations in the different parameters of the system, especially load variations, the classical PI controller may not be able to fulfill the desired system requirements. The adaptive PI controller overcomes the drawback of the classical PI controller where both proportional and integral gains are tuned continuously according to load variations. Therefore, the adaptive PI controller can fulfill the desired requirements. The adaptive PI controller, presented in [37], can be expressed as follows:
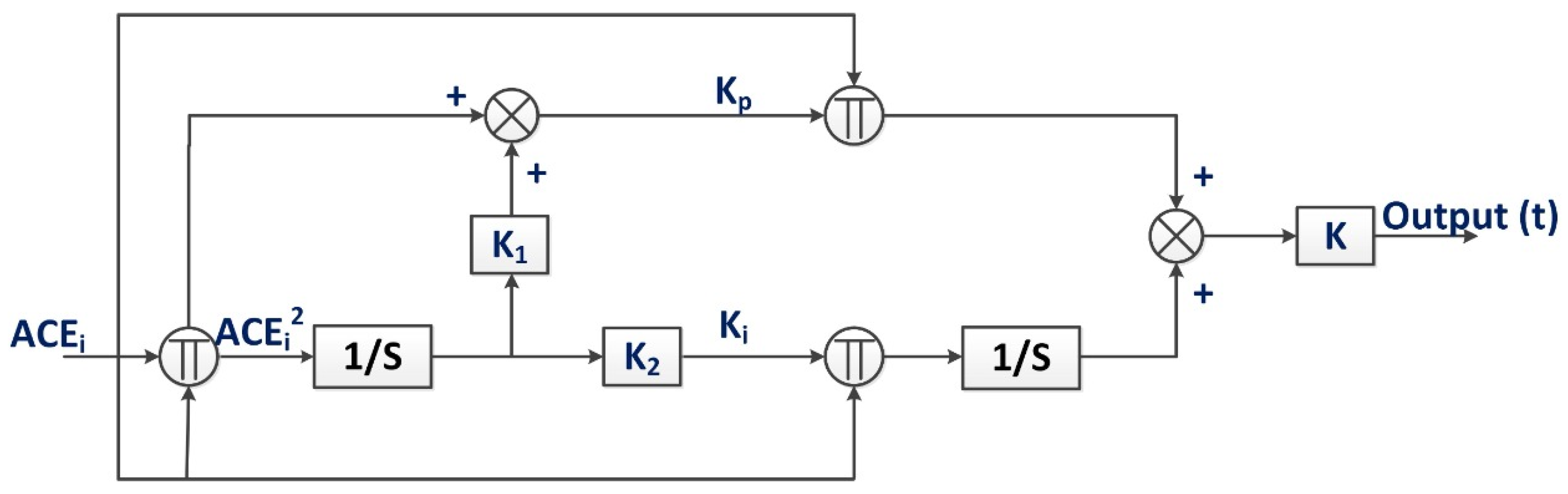
where K is a constant value, Kp and Ki are the proportional and integral gains, respectively. Both the proportional and integral gains are updated continuously according to the ACE, as shown in Figure 2, which is expressed by:
where K1i and K2i are constant values.
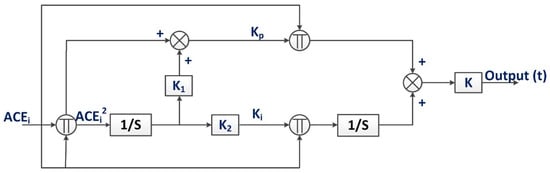
Figure 2.
The adaptive PI applied for two area systems.
The controller mainly consists of initial constants (K, K1i, and K2i) which are selected by trial and error, while Kp and Ki are auto-tuned gains which are changed with the system performance. Further mathematical details of the adaptive PI controller are given in [37].
4. Wave Modeling
The WECS is a promising renewable energy resource. However, most of the literature did not consider WECS as a disturbance to load frequency control. Several methods are used for the conversion process from wave energy to electrical energy [38]. The WECS considered in this paper consists of Archimedes Wave swing (AWS) coupled with a linear permanent magnet synchronous generator (LPMSG) [39].
The equation of motion of AWS can be expressed based on Newton’s 2nd law as follows [39]:
where v is the linear speed of the translator, x is the distance travelled by the floater and translator, is the total mass of the AWS and the translator, is the hydraulic damping coefficient of AWS, is the spring constant of the AWS, is the electromagnetic force of the LPMSG, and is the total exciting force acting on the floater of AWS due to wave.
The rotor of the LPMSG is called a translator where it reciprocates, and hence, both the magnitude and direction of the velocity of the translator vary with time. Therefore, both the amplitude and frequency of the output voltages and currents of the LPMSG change. The model of the LPMSG in reference frame can be expressed as follows [39]:
while the active power equation is given by:
where are stator currents in reference frame, are induced voltages in reference frame, are inductance of stator windings in reference frame, is the stator resistance, is the permanent magnet flux, is the angular speed of translator which is given by
where λ is the pole width.
5. Simulation Results
The performance of the proposed control technique for two area systems is assessed by a computer simulation using MATLAB software. Different tasks are executed to examine the performance of the proposed technique under several operating conditions. The first task is set up to examine the performance of the adaptive PI controller under load variations. The second task is dedicated to comparing the results obtained from the proposed technique with the Proportional-Integral-Derivative and Acceleration (PIDA) controller optimized by the Teaching-Learning-Based-Optimizer (TLBO) as presented in [32]. The comparison is carried out under load variations in both areas and then variation in WECS as disturbances to bath areas too. The parameters of the system under study are given in Table 1.

Table 1.
System parameters.
5.1. Performance of the Proposed Adaptive PI
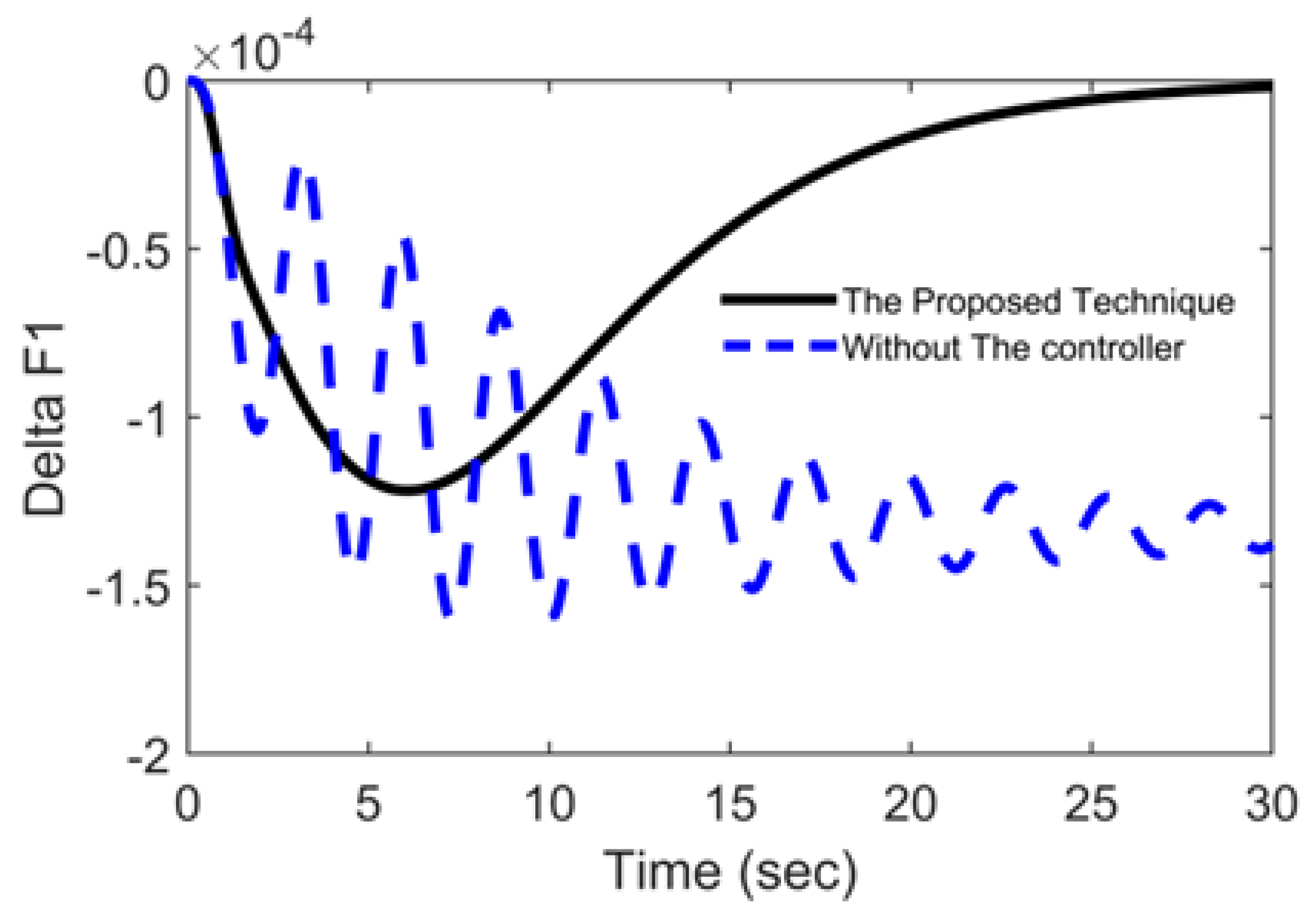
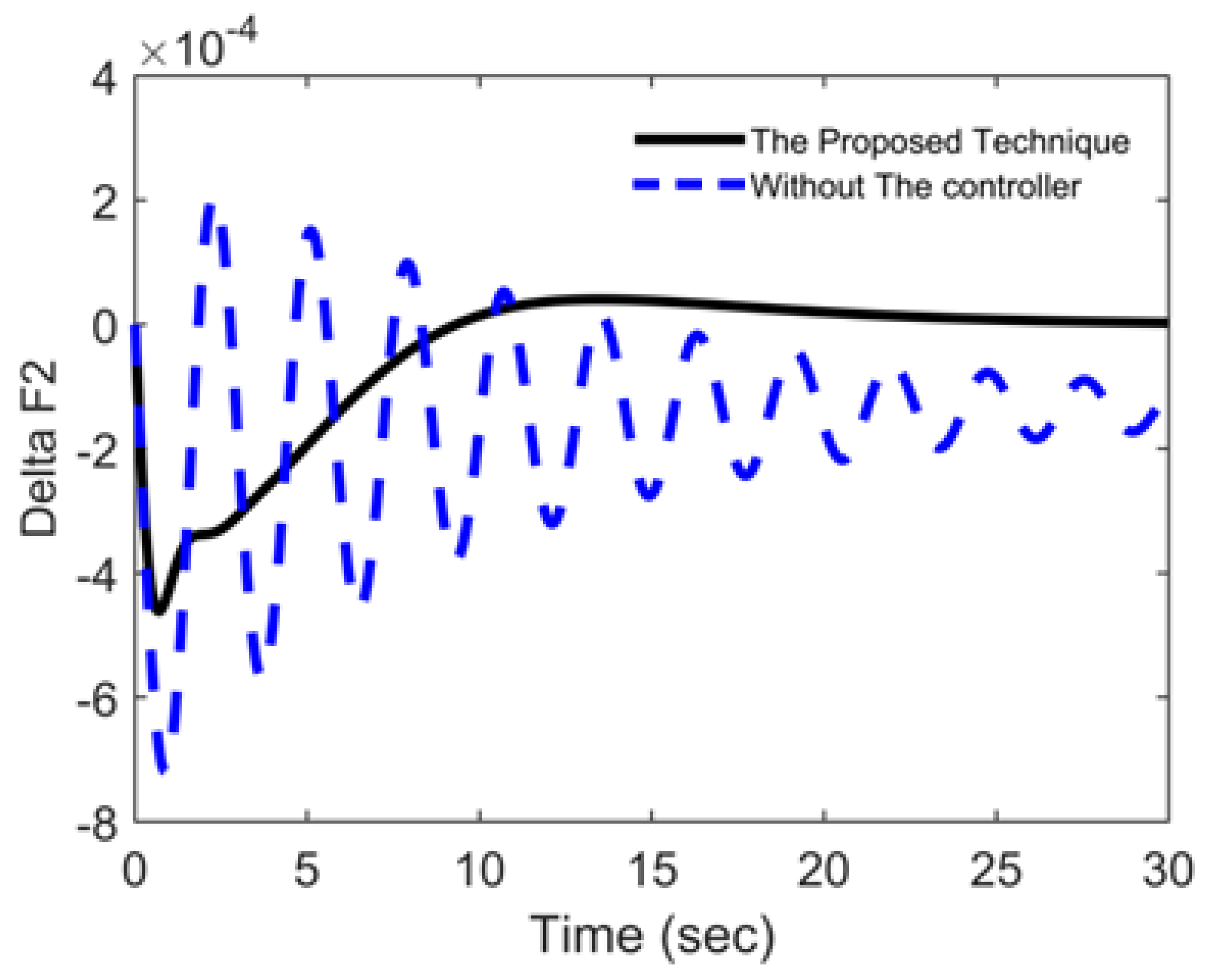
In this section, testing of the dynamic performance of the proposed adaptive PI controller applied to the two-area system is carried out, shown in Figure 1, where area 2 is subjected to a 1% load change. Figure 3 and Figure 4 illustrate the frequency deviation in areas 1 and 2, respectively, with and without the proposed technique. Without the proposed controller, the reference power for the governor is constant and does not depend on the load variations. As a result, the deviation in the system’s frequency will not disappear at steady state. The results indicate the ability of the proposed control to restore the frequencies of the two areas to their nominal values when the reference power for both areas is changed according to load variations.
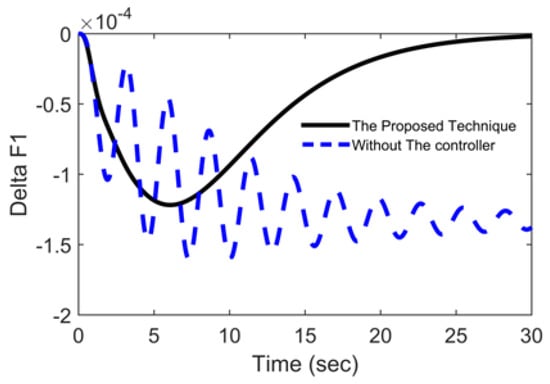
Figure 3.
Frequency deviation (p.u.) in area 1.
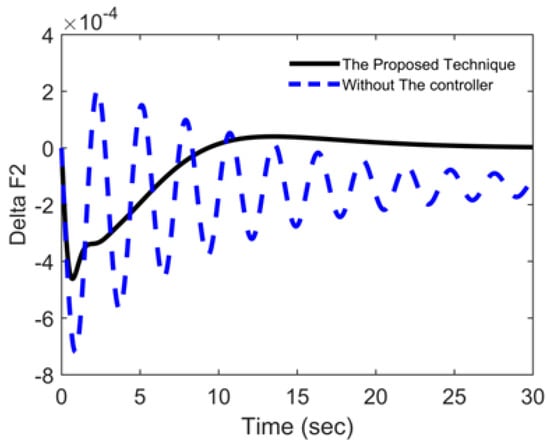
Figure 4.
Frequency deviation (p.u.) in area 2.
5.2. Comparison with the Method Presented in
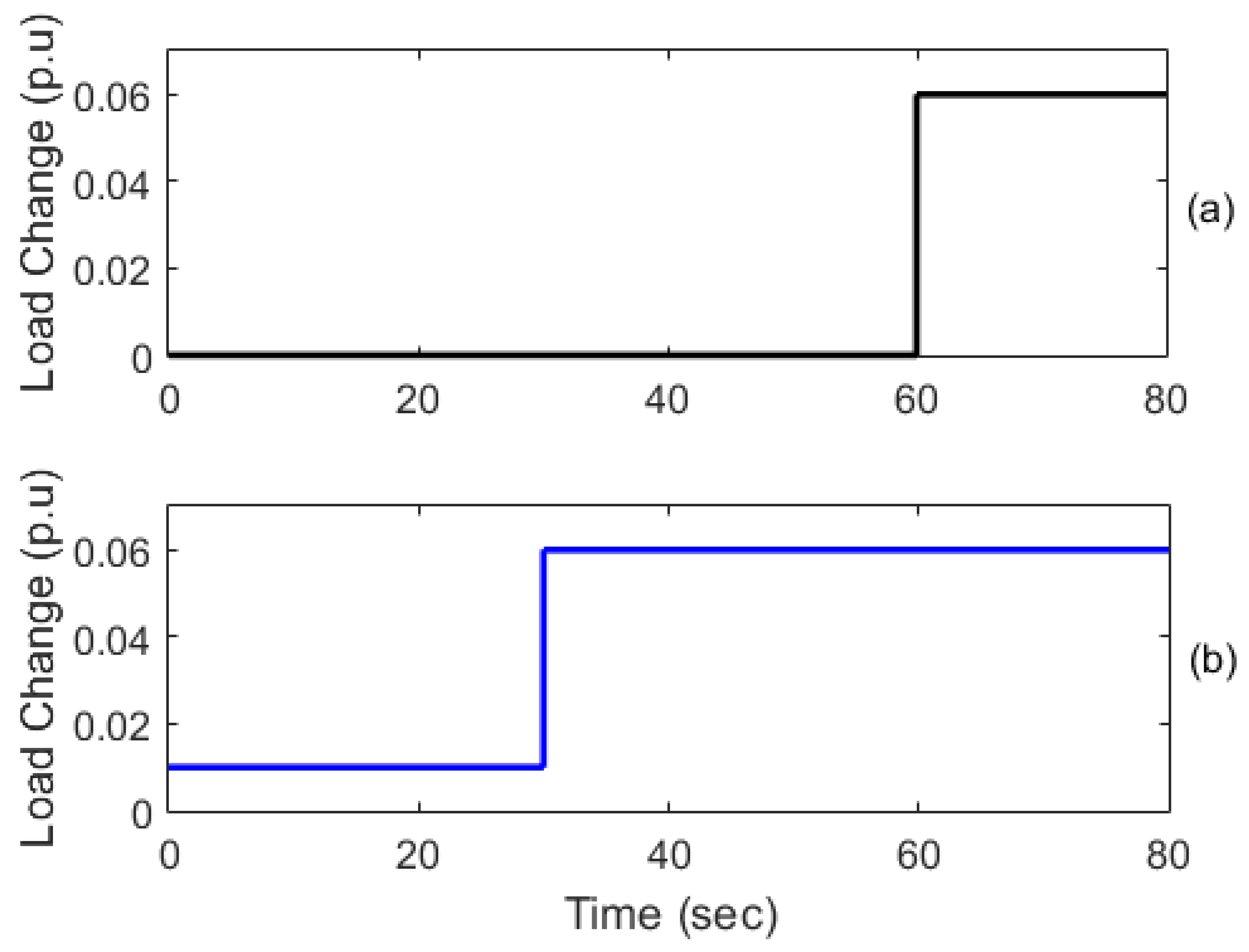
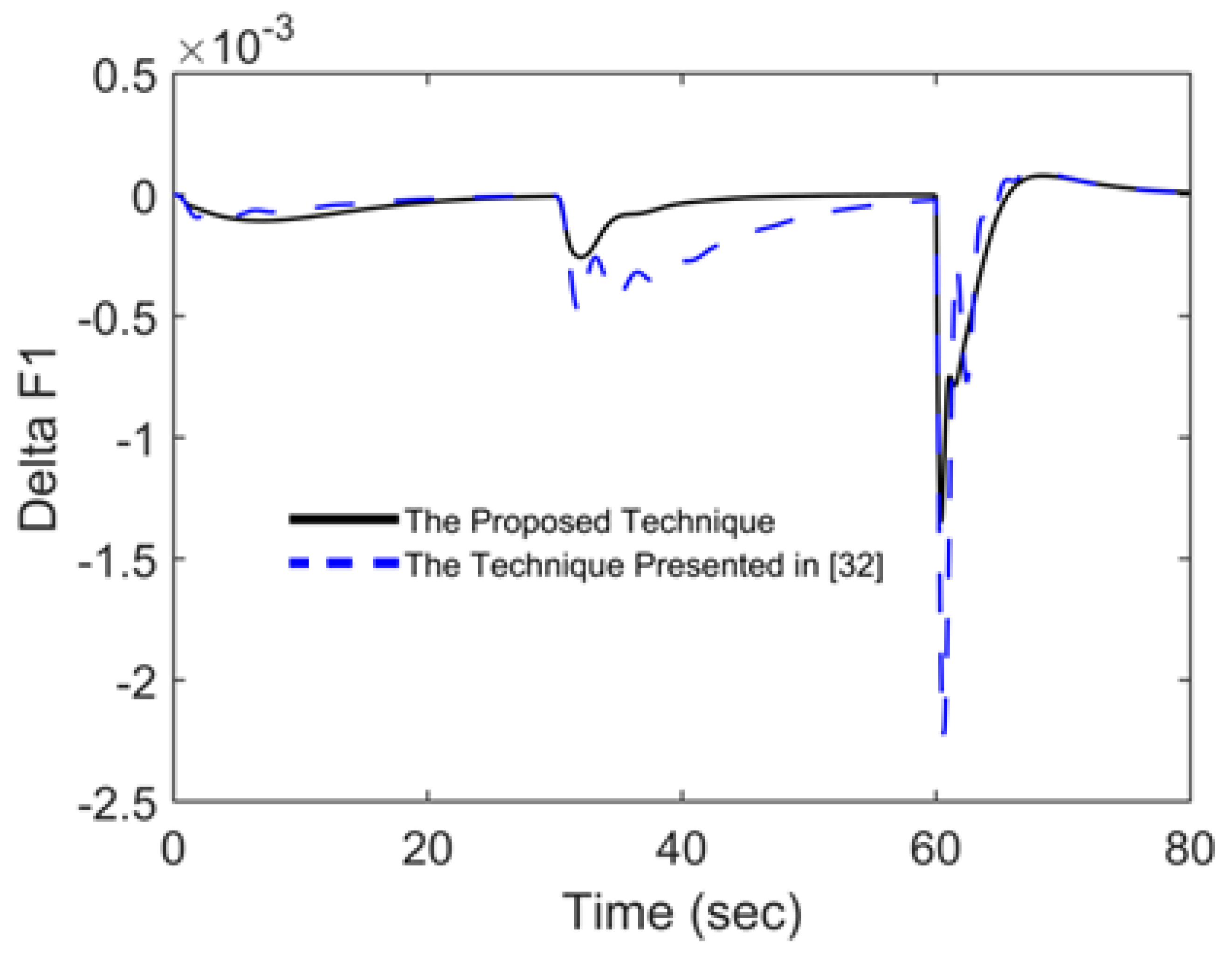
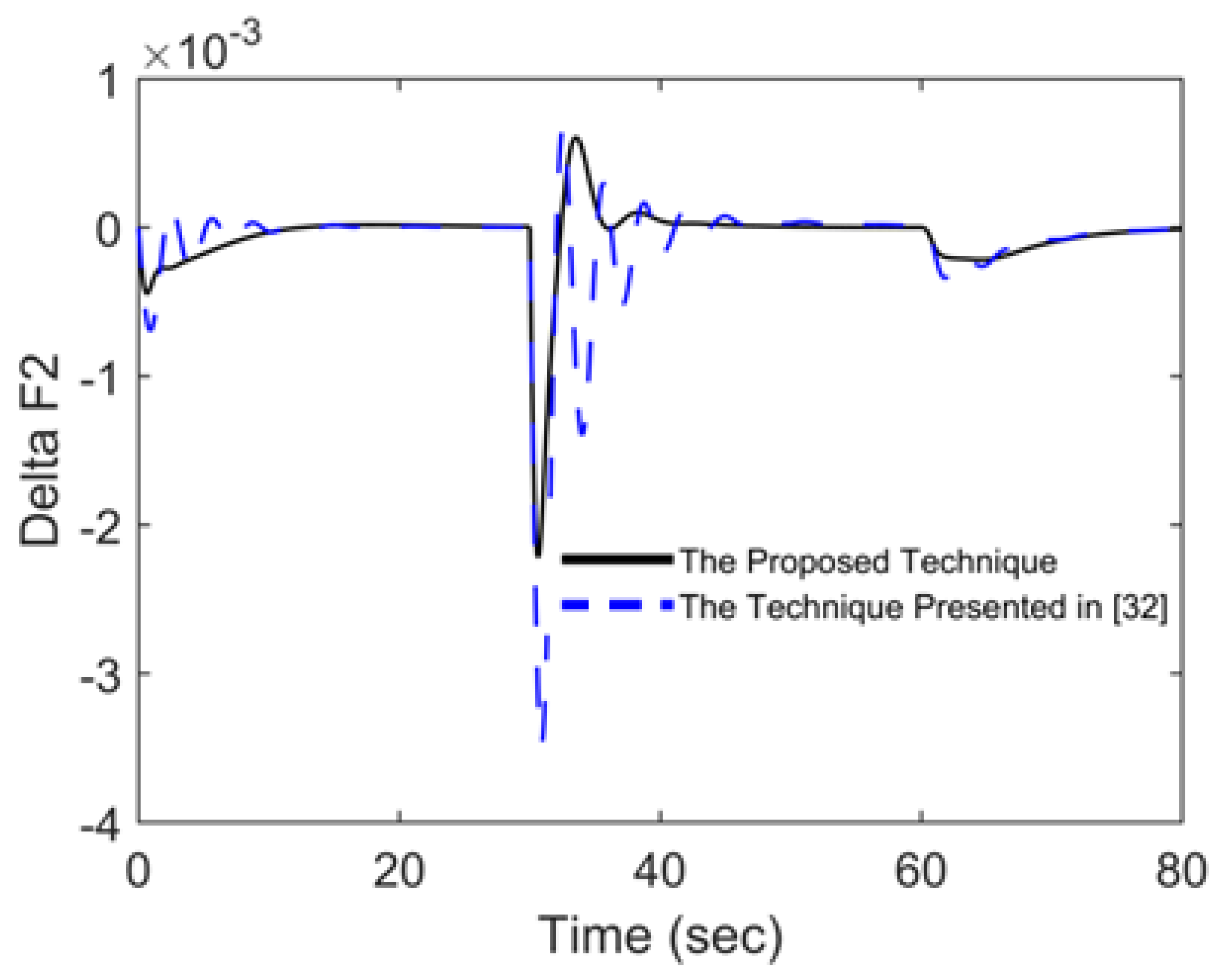
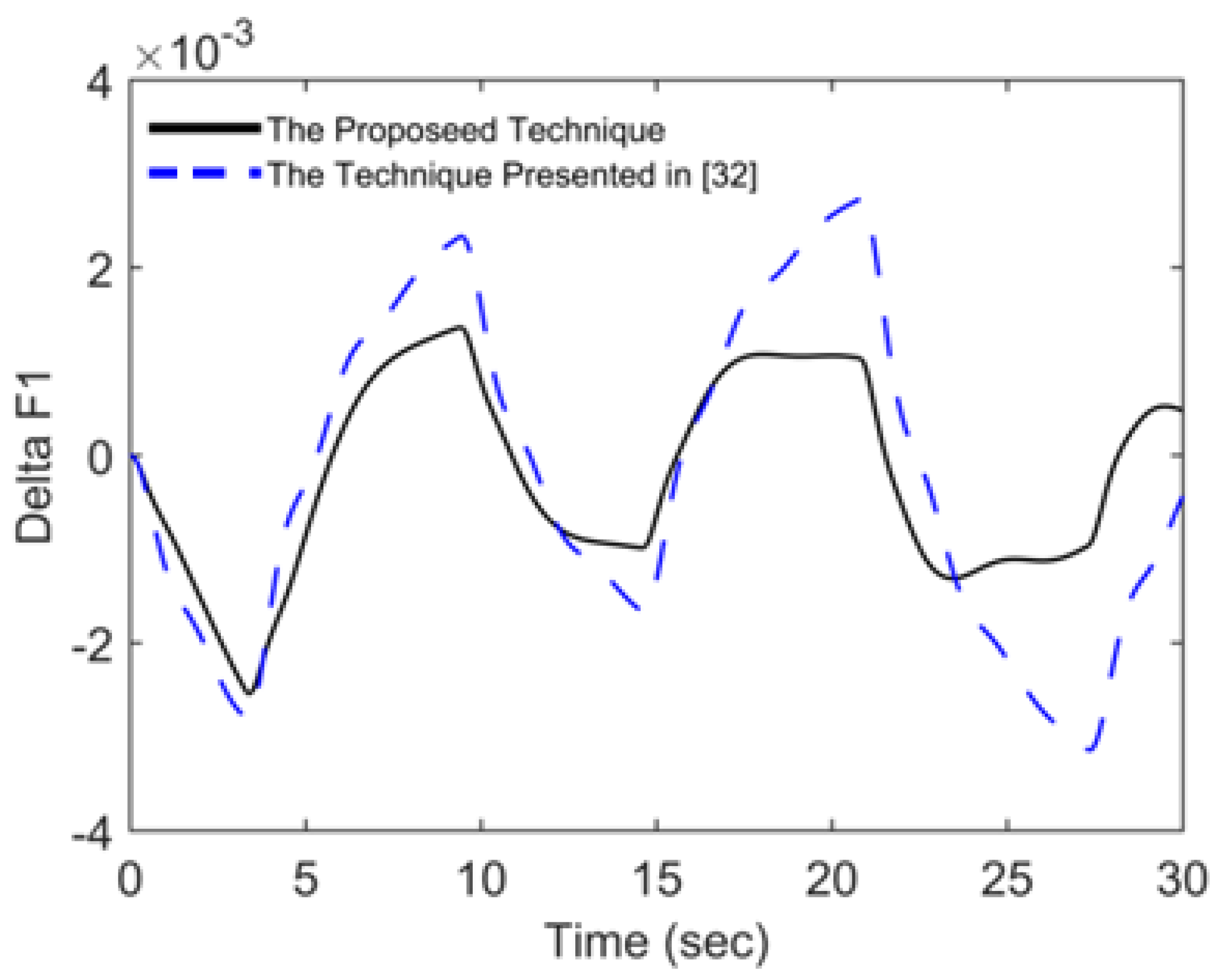
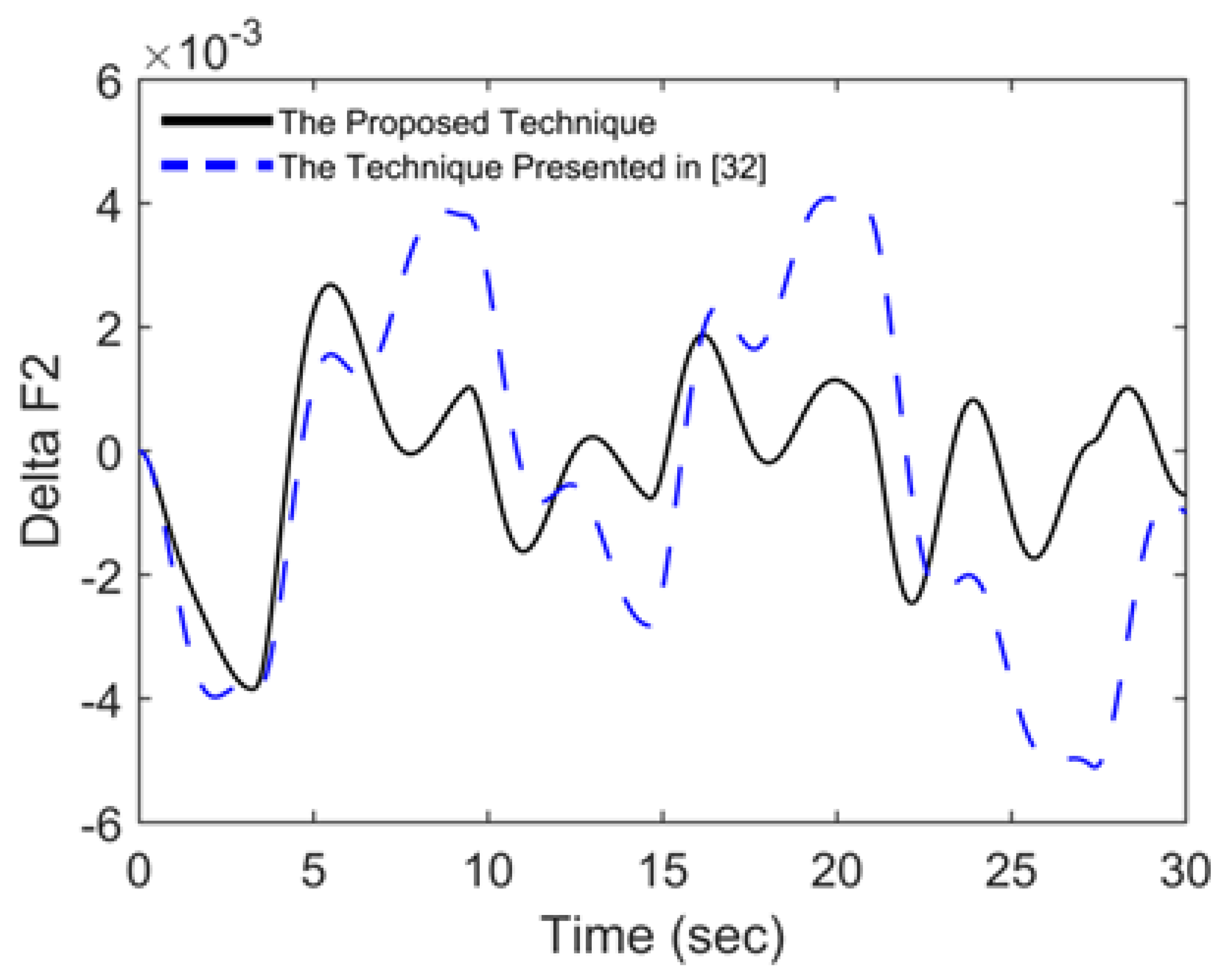
This section is dedicated to comparing the results obtained from the proposed technique and the PIDA controller optimized by the TLBO method with the parameters shown in Table 2 [32]. The load is changed by 1% in area 2 at t = 0 s, then is suddenly changed by 6% in area 2 at t = 30 s, and finally is changed by 6% in area 1 at t = 60 s, as shown in Figure 5. Both techniques are tested using the same parameters of the system and load variations. Figure 6 and Figure 7 illustrate the frequency deviation in areas 1 and 2, respectively, under the previous scenario of load variations when the proposed adaptive PI is applied in both two areas and compared with the results obtained from using the method presented in [32].
Table 2.
The parameters used for the technique presented in [32].
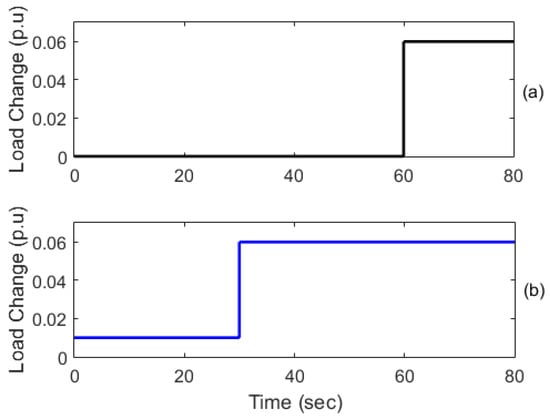
Figure 5.
Load variations scenario in (a) area 1 and (b) area 2.
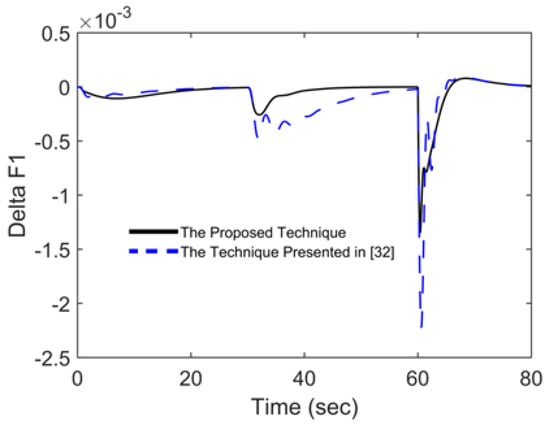
Figure 6.
Frequency deviation (p.u.) in area 1 under various load variations.
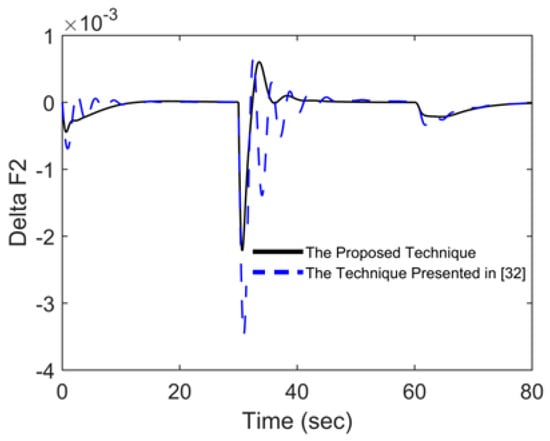
Figure 7.
Frequency deviation (p.u.) in area 2 under various load variations.
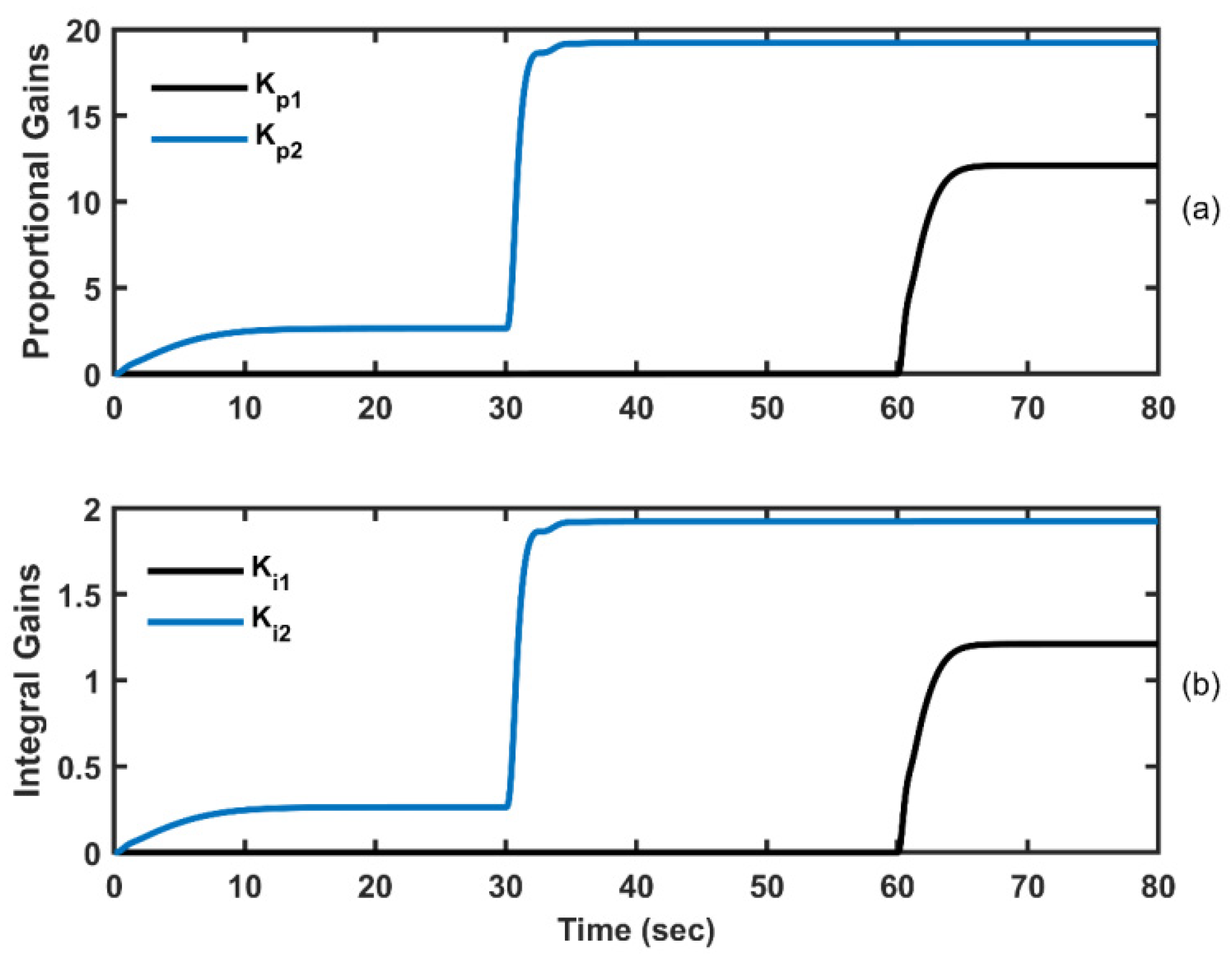
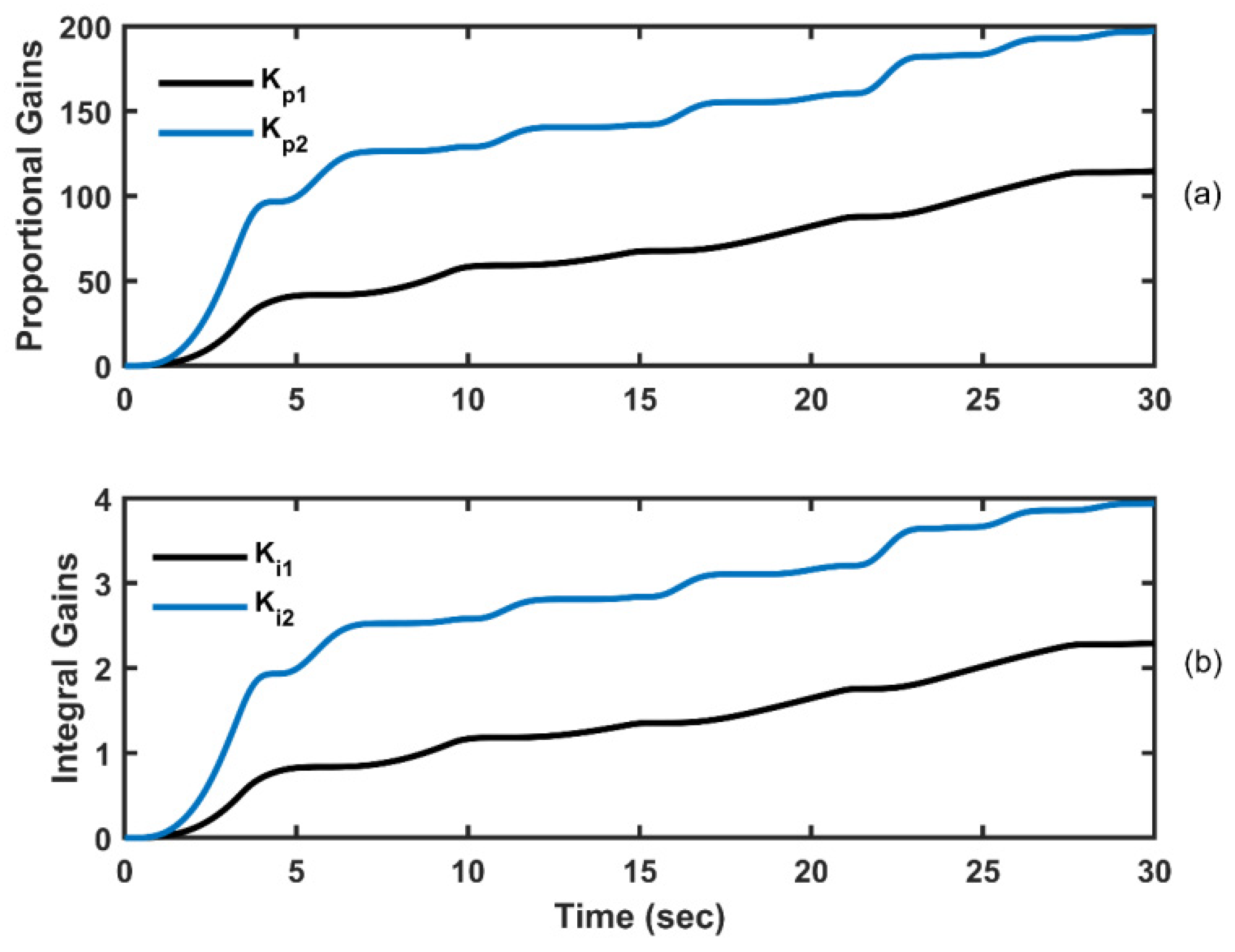
The frequency oscillates from −2.2 × 10−3 to 1 × 10−4 PU in area 1 when the technique presented in [32] is used, while the oscillations change from −1.35 × 10−3 to 0.78 × 10−4 PU in area 1 when the proposed technique is used. In addition, under various load variations, the oscillations in area 2 are changed from −3.5 × 10−3 to 0.665 × 10−3 PU while the technique presented in [32] is used and varied from −2.2 × 10−3 to 0.61 × 10−3 PU when the proposed technique is used. The results reveal that the proposed technique improves the transient response of the system and decreases the peak-to-peak oscillations. The proposed technique is attractive for real time applications in order to prevent the protection devices from operation, such as under and over frequency relays. Therefore, the results display the superiority of the proposed adaptive technique over the method presented in [32]. Moreover, the major feature of the proposed technique is that the parameters of the controller are tuned continuously according to load variations as illustrated in Figure 8, while the parameters of the optimized TLBO based PIDA controller are optimized once as given in Table 2.
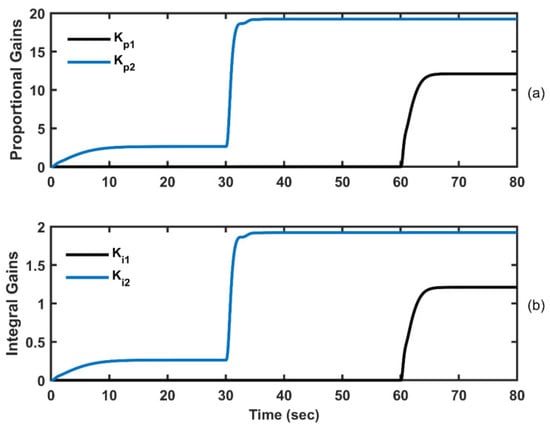
Figure 8.
Adaptive controller parameters: (a) Proportional and (b) Integral Gains for the two areas.
6. Wave Energy Conversion System (WECS) Disturbance
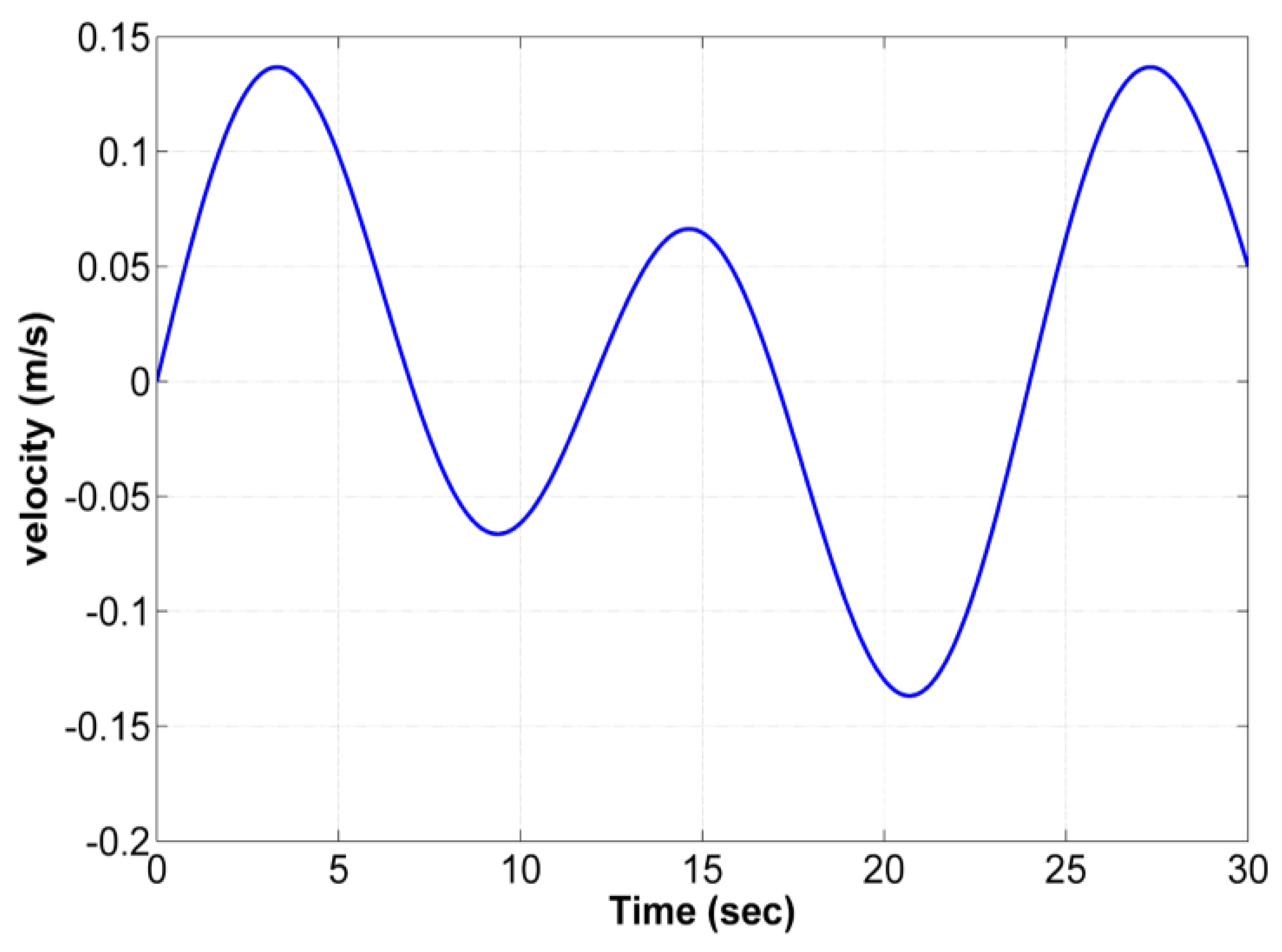
In this section, the dynamic performance of the proposed LFC system is evaluated when the WECS is presented. For the system under study, the WECS is used for both two areas and their associated disturbances are considered under irregular wave. The force corresponding to an irregular wave can be represented as a summation of two sinusoids with different magnitudes and frequencies, as shown in Figure 9, which can be expressed as follows [39]:
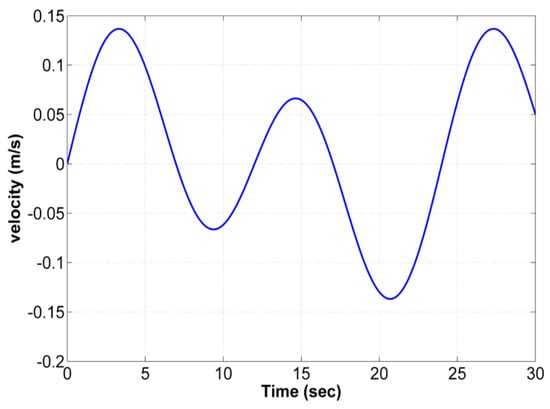
Figure 9.
Irregular wave energy.
The frequency deviations in areas 1 and 2 are displayed in Figure 10 and Figure 11, respectively. Figure 12 illustrates the continuous tuning of both proportional and integral gains of the proposed adaptive PI controller to compensate for WECS disturbances applied in both areas. The results demonstrate the superiority of the proposed LFC system over the technique presented in [32]. For area 1, the peak-to-peak frequency deviation is 3.9 × 10−3 PU, when using the proposed technique, while the PIDA optimized by Teaching Learning Based (TLBO) presented in [32] results in a peak-to-peak frequency deviation of 5.95 × 10−3 PU. The peak-to-peak frequency deviation of area 2 is 6.5 × 10−3 PU when the proposed technique is utilized. In comparison, the peak-to-peak oscillation when using the method presented in [32] is increased to 9.2 × 10−3 PU.
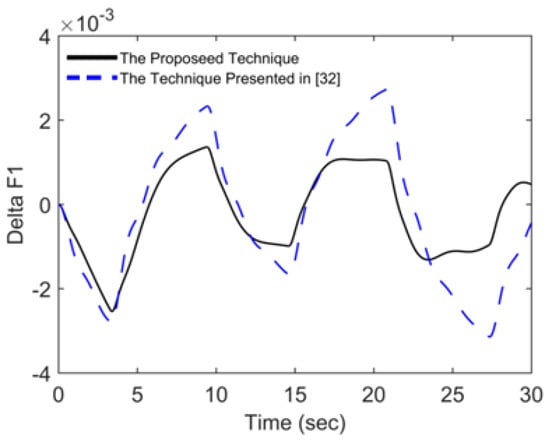
Figure 10.
Frequency deviation (p.u.) in area 1 under the variation in WECS as a disturbance.
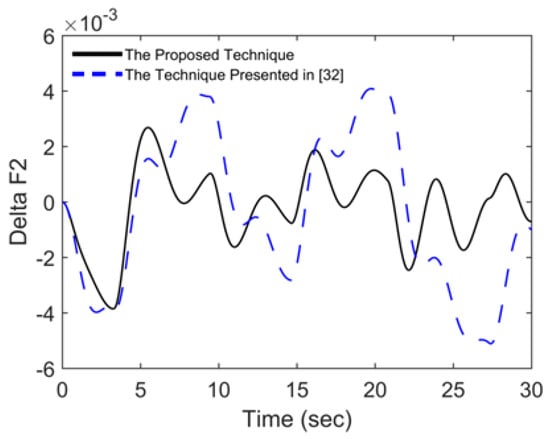
Figure 11.
Frequency deviation (p.u.) in area 2 under the variation in WECS as a disturbance.
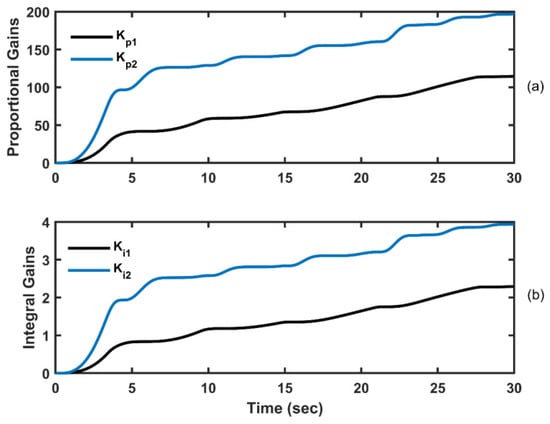
Figure 12.
Adaptive controller parameters: (a) Proportional and (b) Integral Gains under wave disturbances for the two areas.
7. Reliability of the Proposed Controller
In this section, the reliability of the proposed controller is examined through the hybrid PV-thermal system. Figure 13 shows the nonlinear model of the hybrid PV-thermal system, and the parameters are given in Table 3 [40,41]. More detailed equations of the model are presented in [40,41]. Three cases are studied in this section. The first case is dedicated to studying the system under disturbance represented by a step increase in thermal demand of 0.1 pu. In the second case, the system performance is examined under disturbance represented by a step increase in thermal and PV demand by 0.1 pu for each. Finally, sensitivity analysis is carried out.
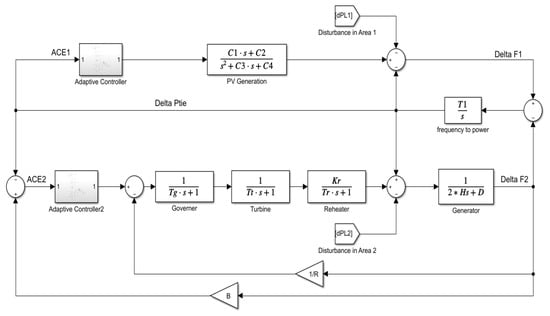
Figure 13.
Hybrid PV-thermal system.
Table 3.
System parameters.
The performance indices used in this section are indicated in Equations (13)–(16) [40,41]. These indices are based on different integrals of errors. The Integral of Absolute Error (IAE) is the integration of the error absolute value during the operating period, the Integral of Time-Absolute Error (ITAE) is the integration of the error absolute value during the operating period weighted by this period, the Integral of Square Error (ISE) is the integration of the error squared during the operating period, and the Integral of Time- Square Error (ITSE) is the integration of the error squared during the operating period weighted by this period, presented in Equations (13)–(16), respectively.
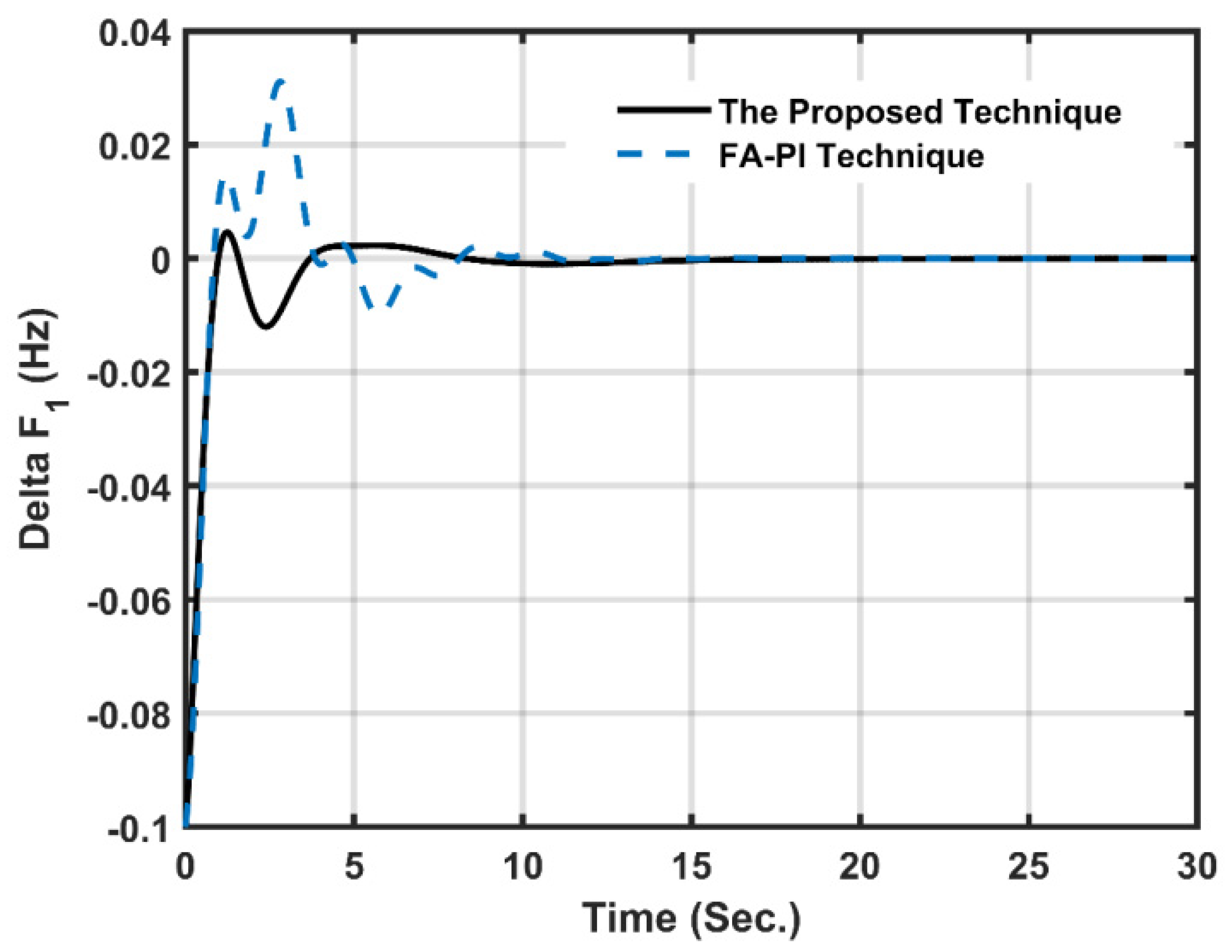
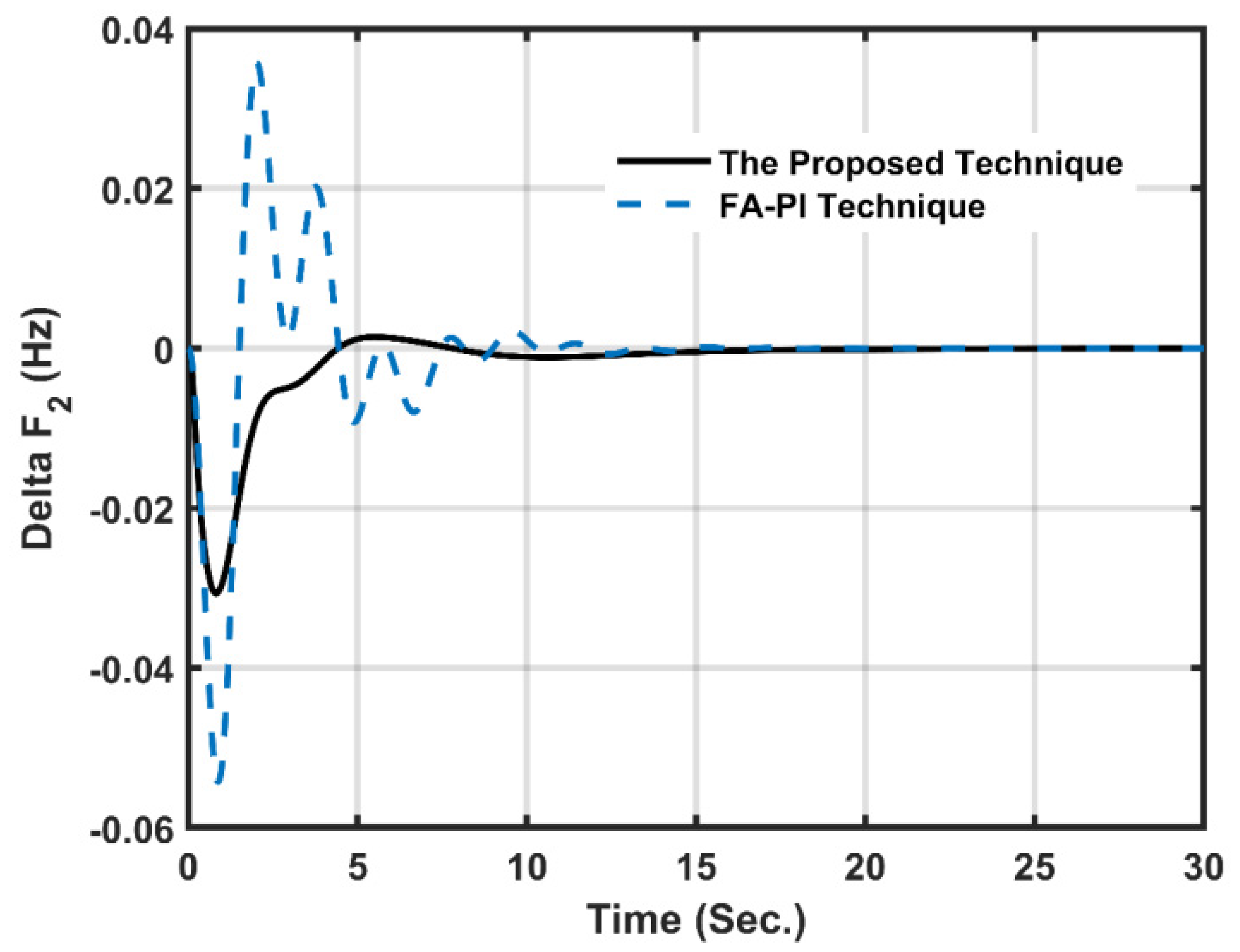
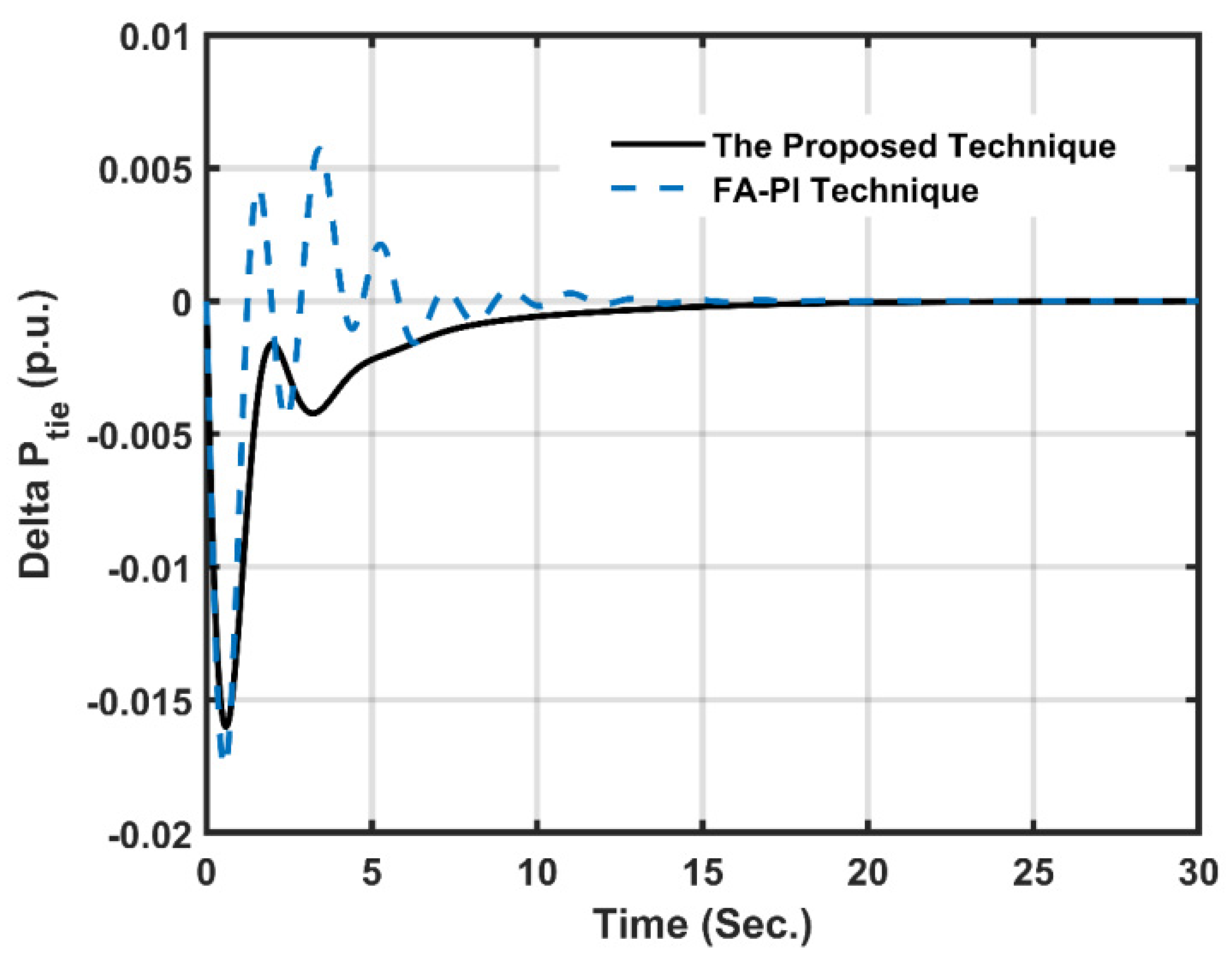
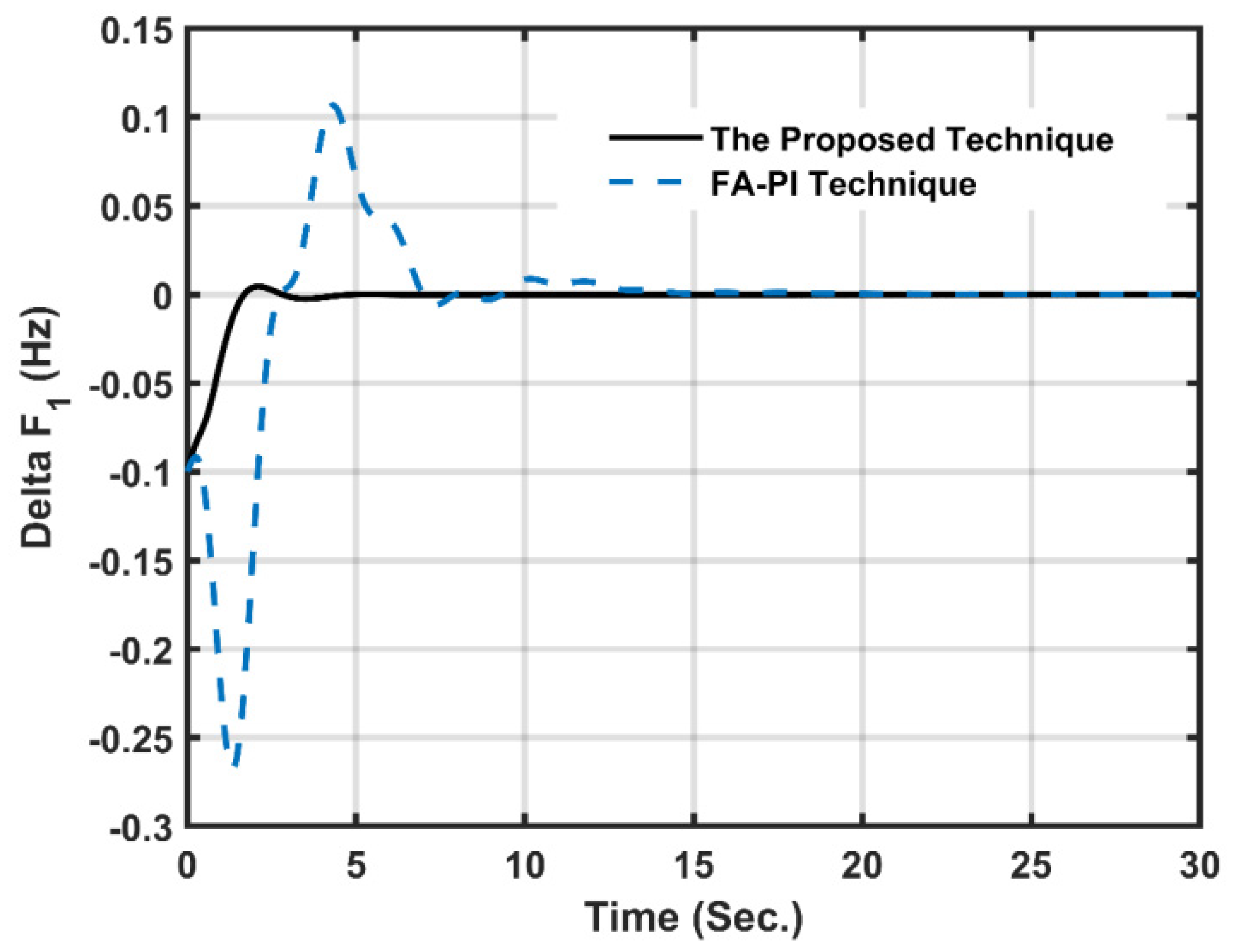
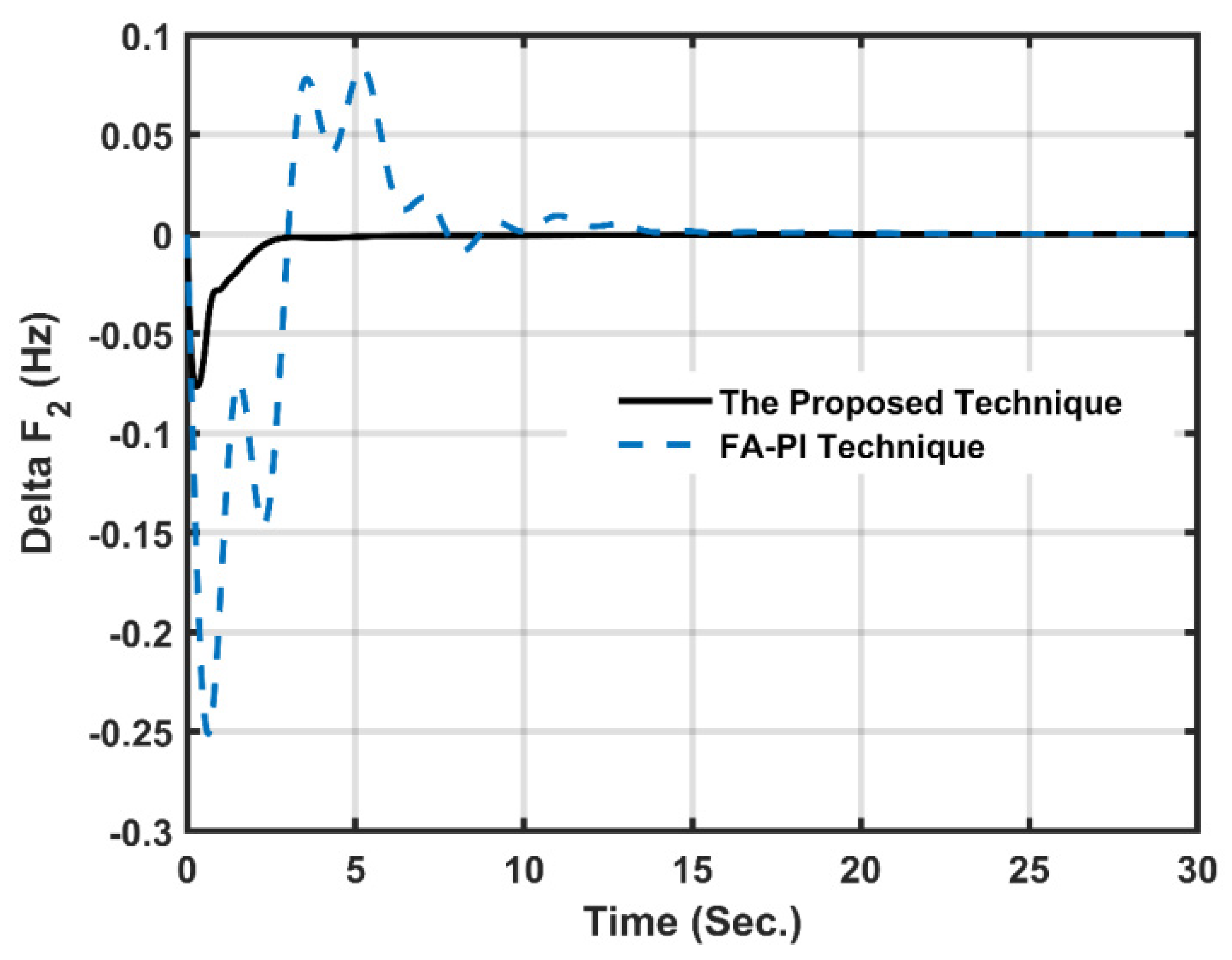
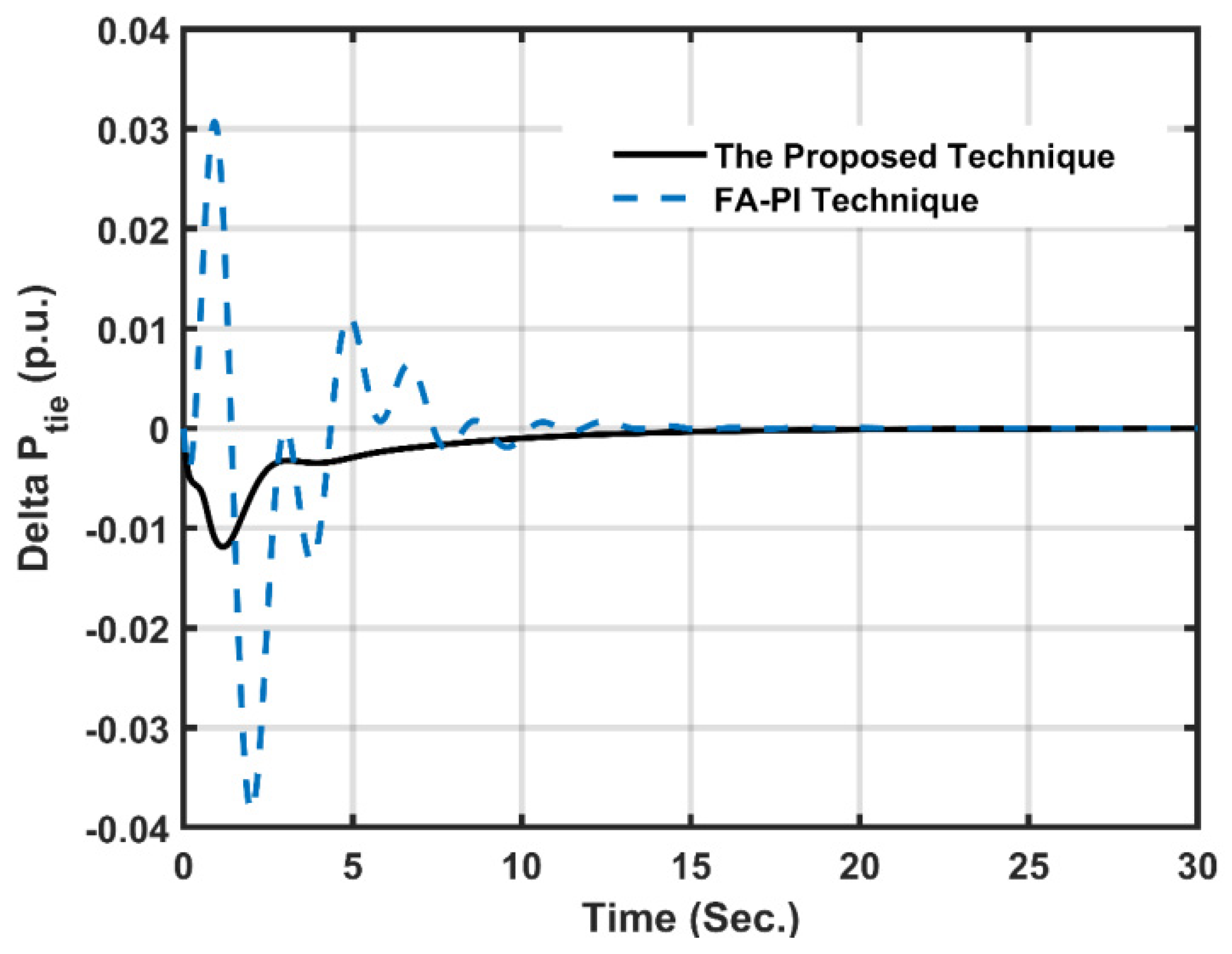
7.1. Case 1: Step Increase in Demand of Thermal System: ΔPL1 = 0.1 pu
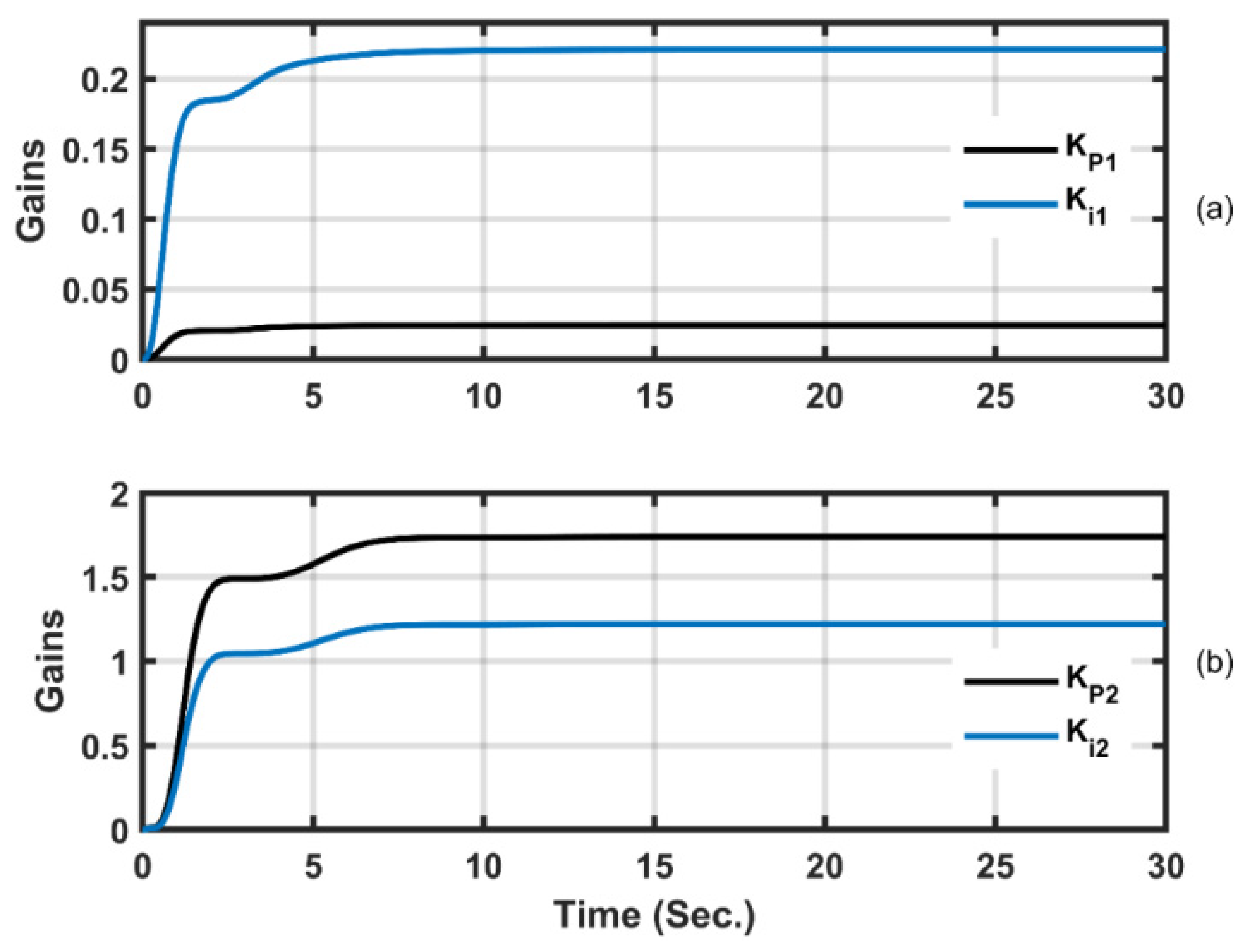
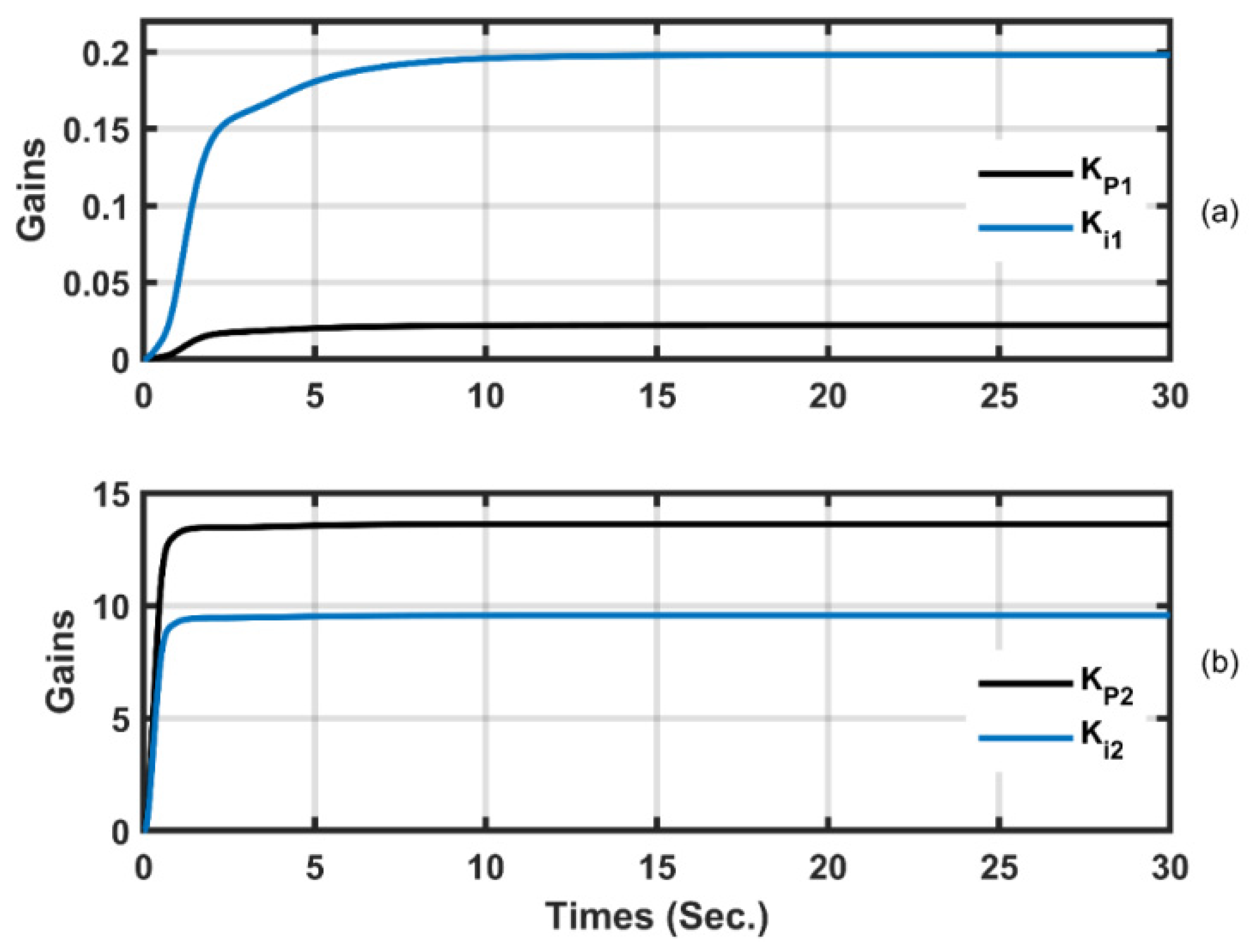
In this case study, the thermal sub-system is under disturbance. The frequency deviations in the two areas and the power deviation in the tie line are illustrated in Figure 14, Figure 15 and Figure 16, respectively. These results show that the performance of the proposed adaptive controller outdoes the PI optimized by using the Firefly Algorithm, presented in [40], as the settling time and overshoot are reduced. The adaptive gains of the proposed controller are illustrated in Figure 17. Moreover, Table 4 indicates the performance indices of the proposed controller and the scheme based on the Firefly Algorithm. The proposed controller succeeds in reducing the IAE, ITAE, ISE, and ISTE by 28.5%, 19.16%, 34.31%, and 71%, respectively.
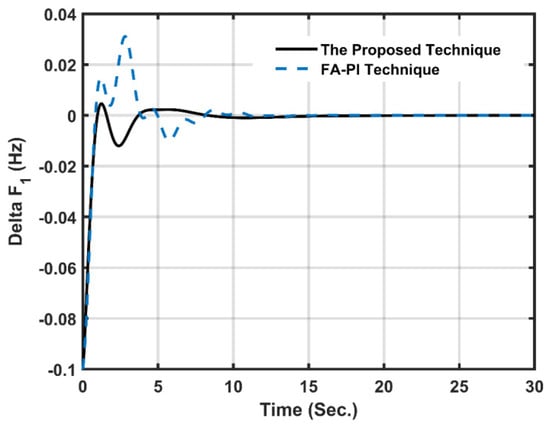
Figure 14.
Frequency deviation in area 1 under disturbance in thermal demand.
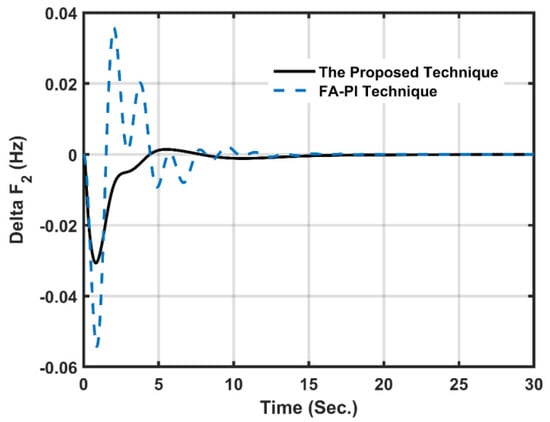
Figure 15.
Frequency deviation in area 2 under disturbance in thermal demand.
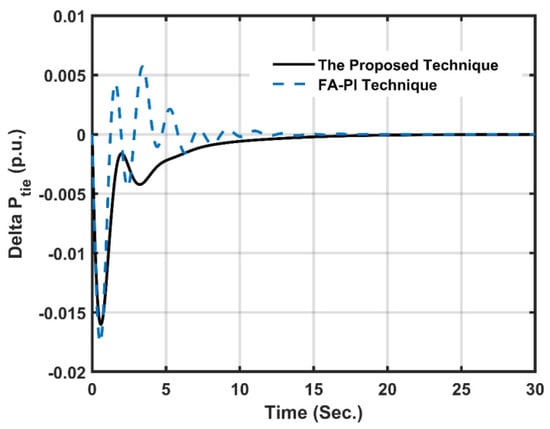
Figure 16.
Tie line power deviation under disturbance in thermal demand.
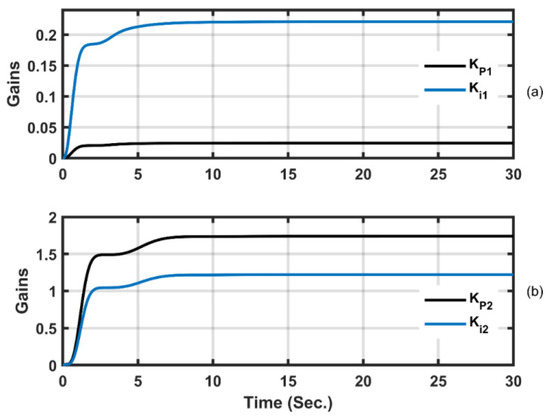
Figure 17.
Proportional and integral gains of proposed adaptive controller: (a) area 1 and (b) area 2 under disturbance in thermal demand.
Table 4.
Performance indices under disturbance in thermal demand.
Table 5 demonstrates a comparison between the dynamic performance indices of the proposed technique and the FA-PI algorithm, presented in [40]. The results show that the settling times of the proposed technique are less than the FA-PI by around 25 % and 8% for Delta F1 and Delta F2, respectively, while remain unchanged for Delta Ptie. Moreover, the peak-to-peak oscillations of the proposed technique are less than the FA-PI by around 62%, 60%, and 30% for the Delta F1, Delta F2, and Delta Ptie, respectively.
Table 5.
Dynamic performance indices of case 1.
7.2. Case 2: Step Increase in Demand of Thermal System and PV Generation: ΔPL1 = 0.1 pu and ΔPL2 = 0.1 pu
This case is dedicated to examining the dynamic performance of the system under disturbances of 0.1% in both the thermal and PV sub-systems. The frequency deviations in the two areas and the power deviation in the tie line are illustrated in Figure 18, Figure 19 and Figure 20, respectively. The Firefly Algorithm based PI results in severe overshoots and oscillatory responses unlike the proposed controller. Figure 21 indicates the adaptive gains of the proposed controller, and Table 6 illustrates the performance indices of the proposed controller and the scheme based on the Firefly Algorithm. The proposed controller succeeds in reducing the IAE, ITAE, ISE, and ISTE by 82.72%, 88.585%, 93.51%, and 98.5%, respectively.
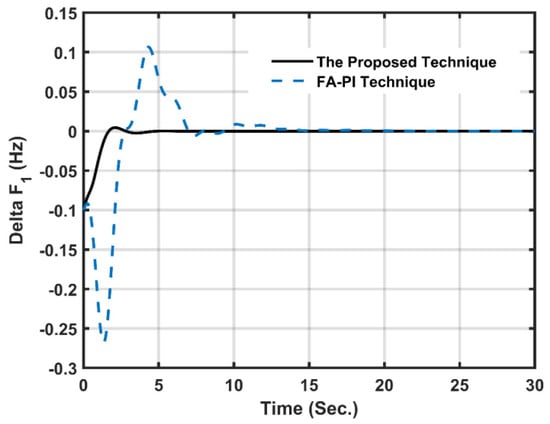
Figure 18.
Frequency deviation in area 1 under disturbances in thermal and PV demands.
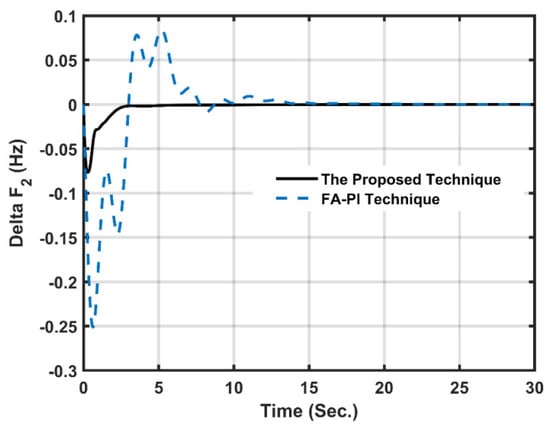
Figure 19.
Frequency deviation in area 2 under disturbances in thermal and PV demands.
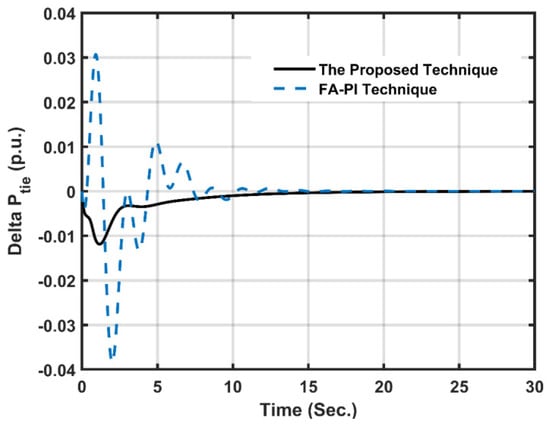
Figure 20.
Tie line power deviation under disturbances in thermal and PV demands.
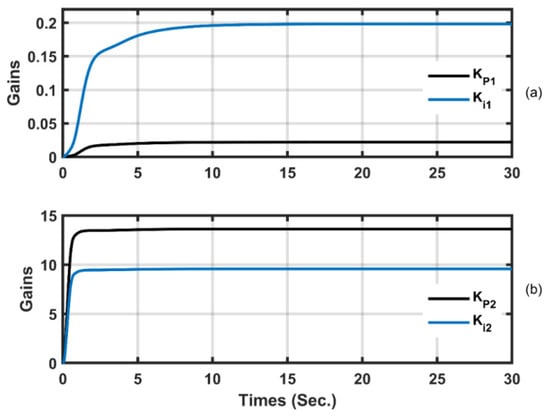
Figure 21.
Proportional and integral gains of proposed adaptive controller: (a) area 1 and (b) area 2 under disturbances in thermal and PV demands.
Table 6.
Performance indices under disturbances in thermal and PV demands.
The numerical values of the dynamic performance indices of case 2 are presented in Table 7. The results show that the settling times of the proposed technique are less than the FA-PI [40] by around 71% and 78% for Delta F1 and Delta F2, respectively, and remain equal for Delta Ptie. In addition, the peak-to-peak oscillations of the proposed technique are less than the FA-PI [40] by around 69%, 75%, and 82% for the Delta F1, Delta F2, and Delta Ptie, respectively.
Table 7.
Dynamic performance indices of case 2.
7.3. Case 3: Sensitivity Analysis
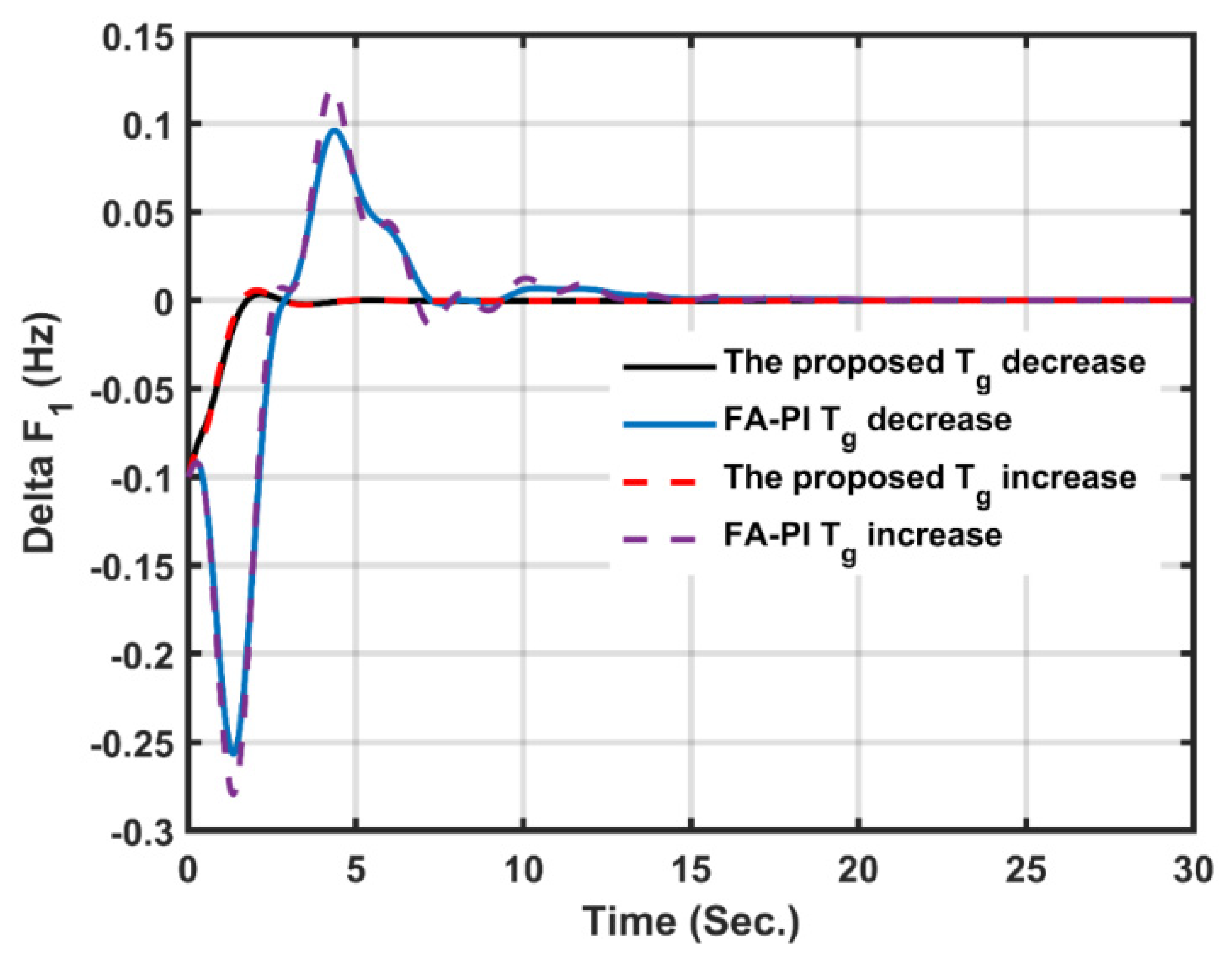
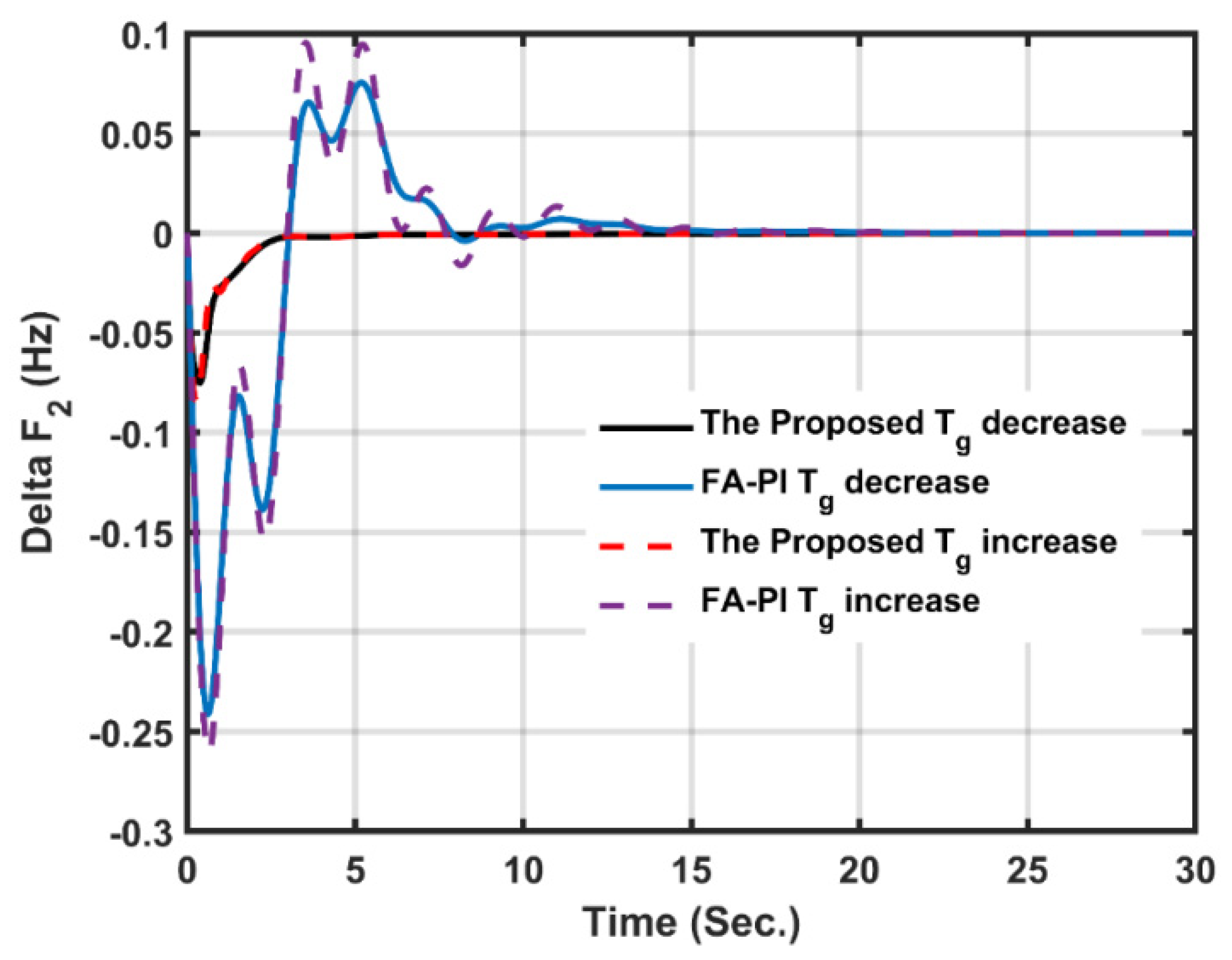
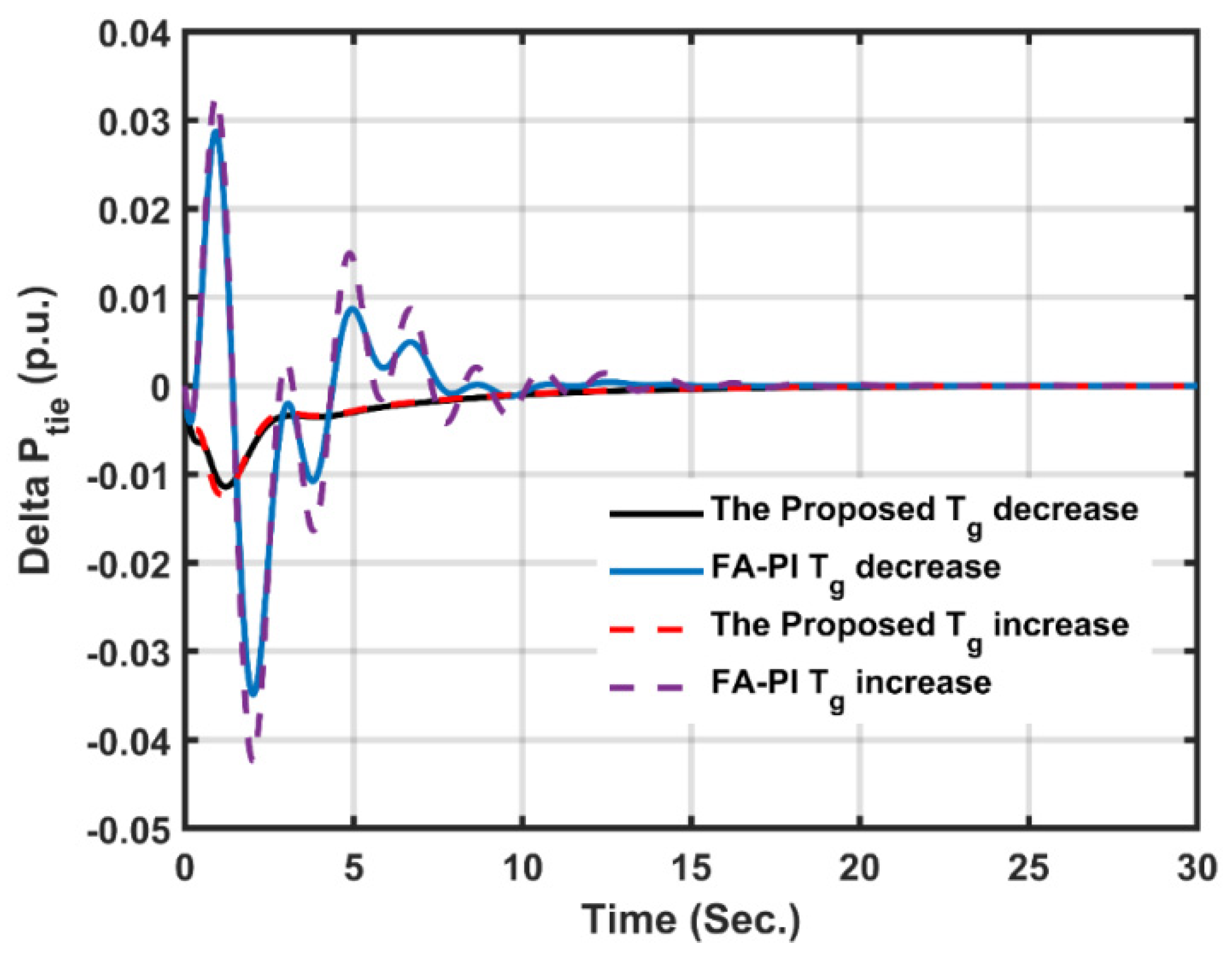
In this section, the performance of the proposed system is evaluated under the parameter variations of the thermal system, Tg and Tt. The disturbances of case 2, ΔPL1 = ΔPL2 = 0.1 pu, are considered. Firstly, Figure 22, Figure 23 and Figure 24 illustrate the frequency deviations in the two areas and the power deviation in the tie line, respectively, when Tg is changed by ±40%. Unlike the oscillatory behavior of the FA based PI controller [40], the proposed adaptive controller succeeds in diminishing the errors with an under-damped and stable response.
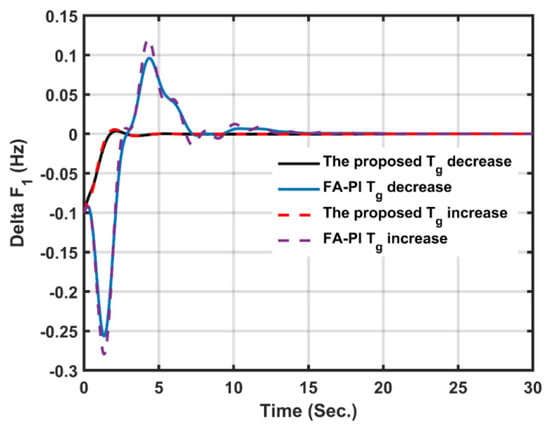
Figure 22.
Frequency deviation in area 1 under Tg changes.
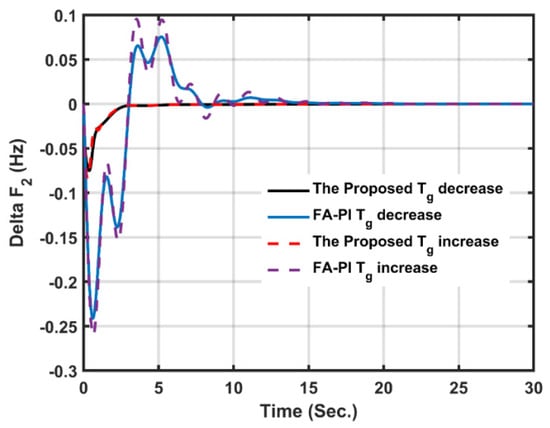
Figure 23.
Frequency deviation in area 2 under Tg changes.
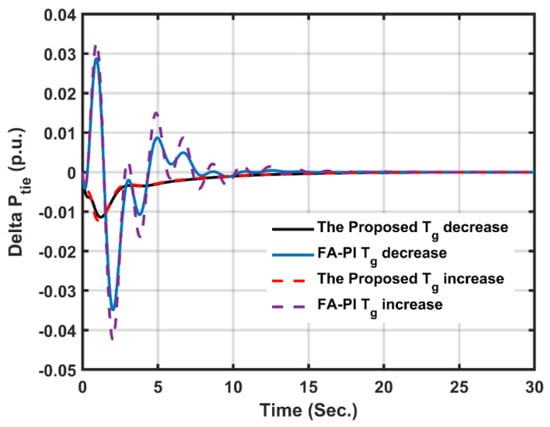
Figure 24.
Tie line power deviation under Tg changes.
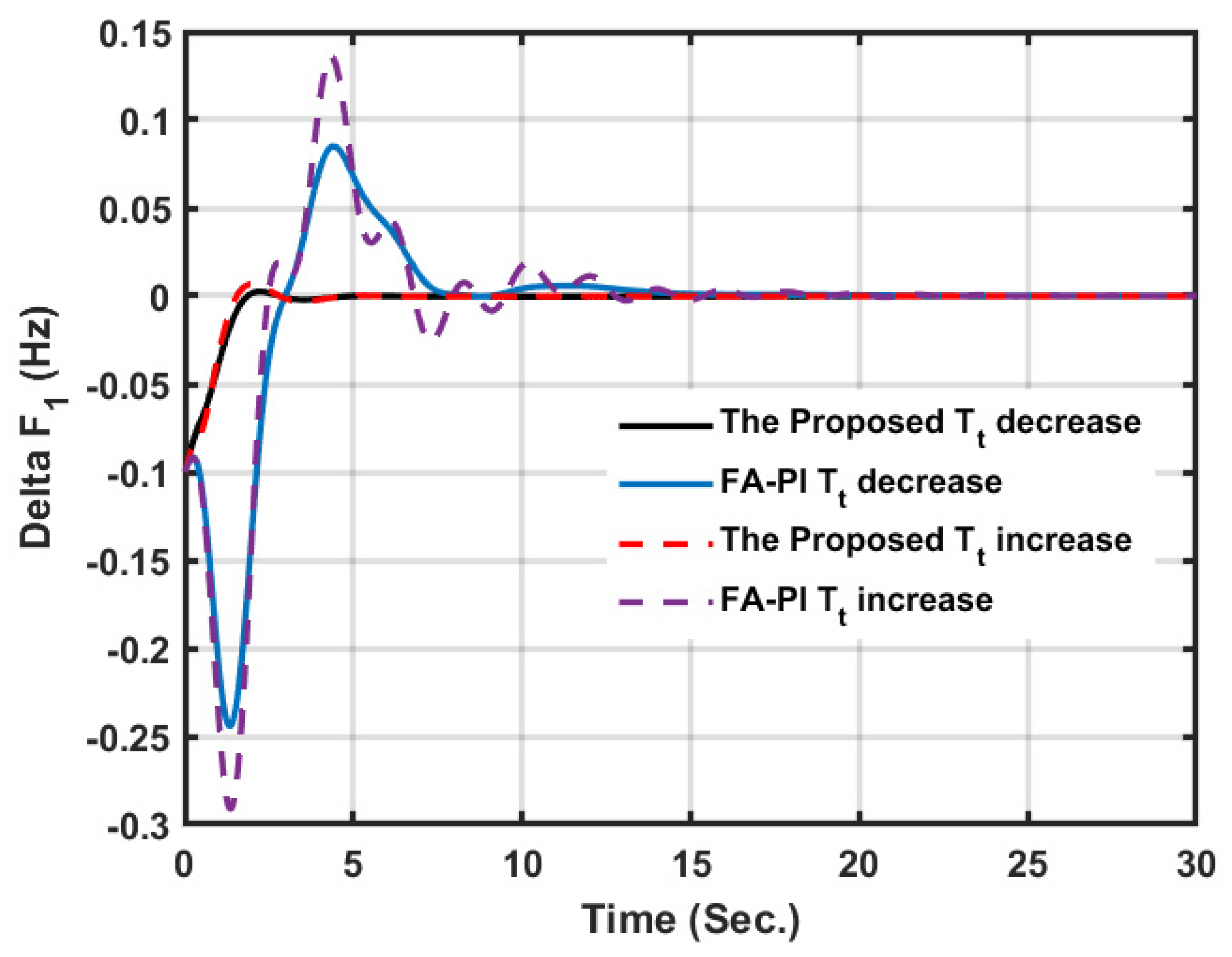
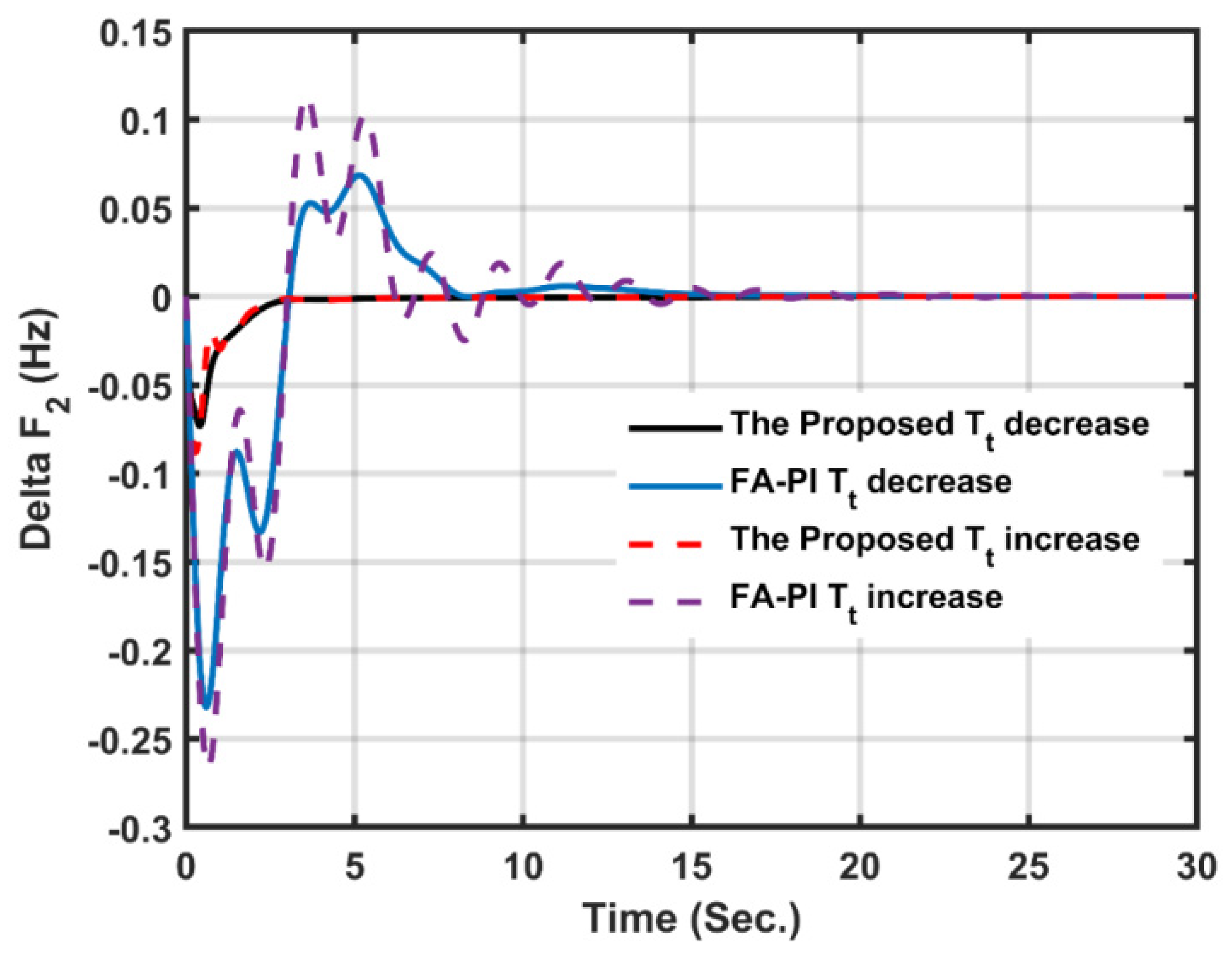
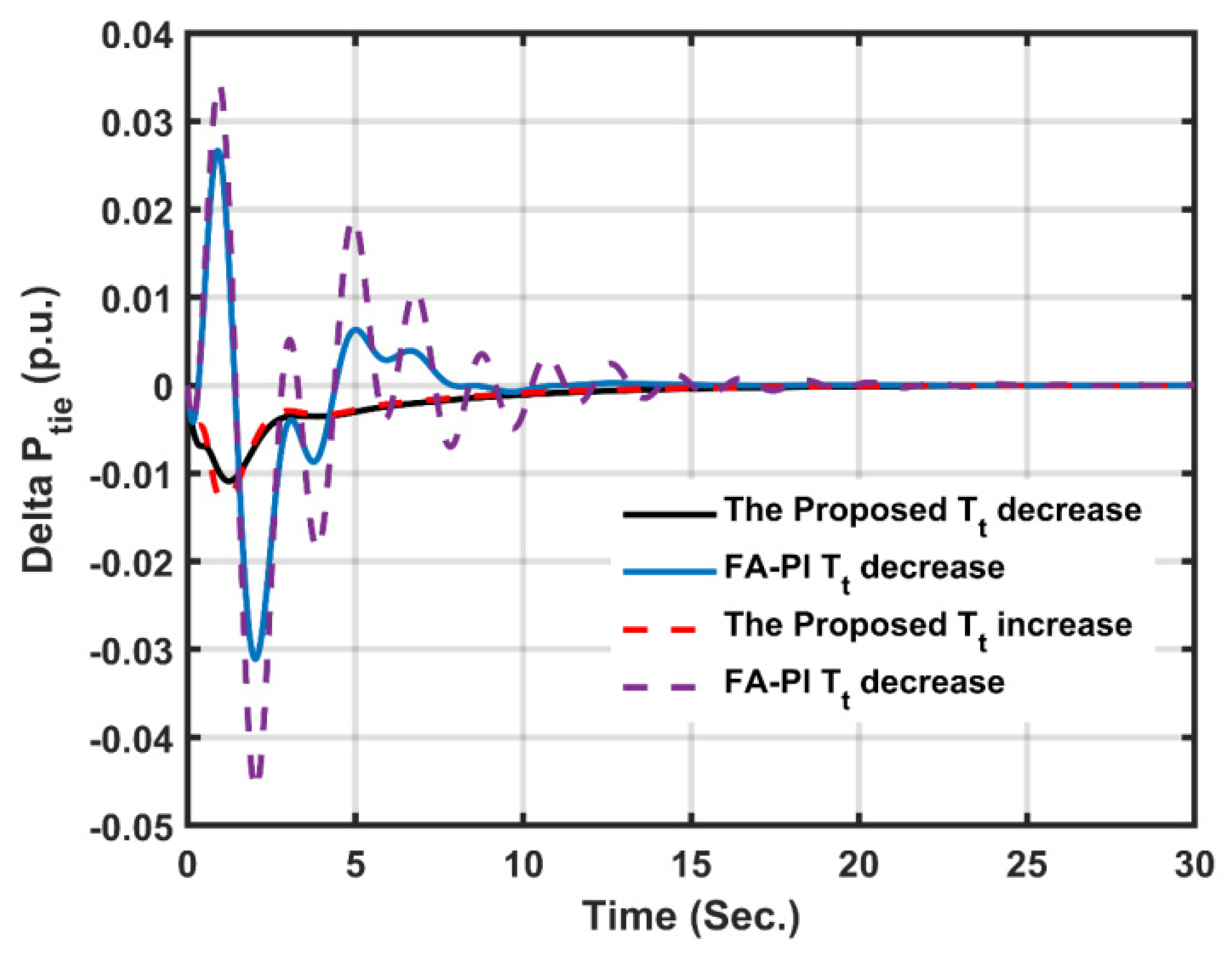
Secondly, Figure 25, Figure 26 and Figure 27 illustrate the frequency deviations in the two areas and the power deviation in the tie line, respectively, when Tt is changed by ±40%. The results demonstrate the superiority of the proposed adaptive controller over the FA based PI controller [40] in terms of reduced settling time and damped oscillations.
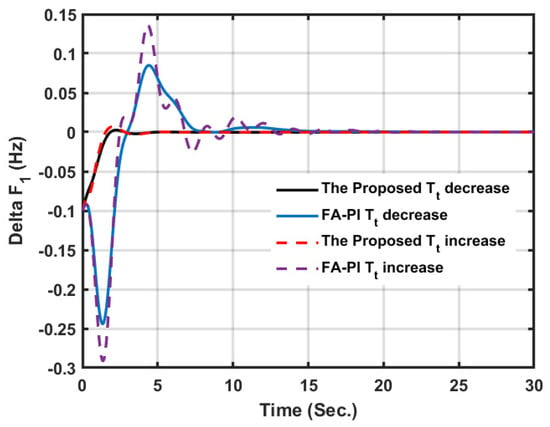
Figure 25.
Frequency deviation in area 1 under Tt changes.
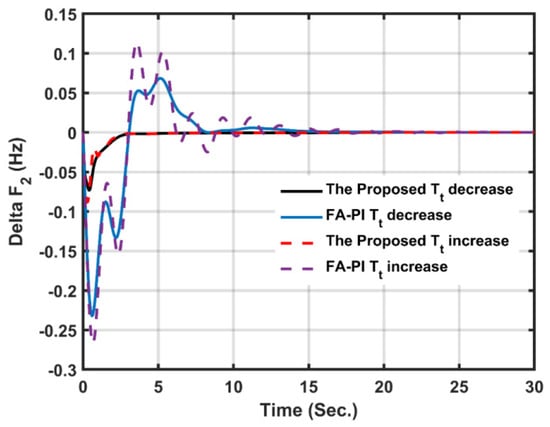
Figure 26.
Frequency deviation in area 2 under Tt changes.
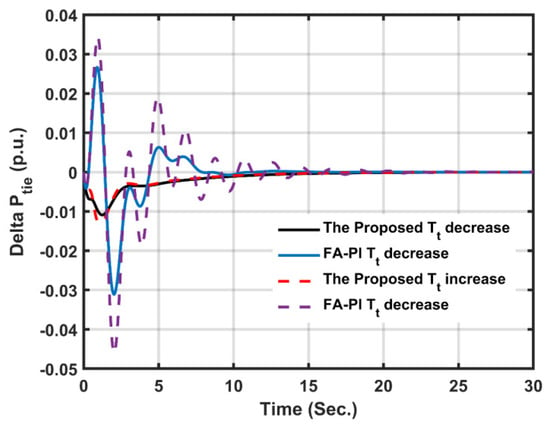
Figure 27.
Tie line power deviation under Tt changes.
8. Conclusions
This paper presented an adaptive controller based LFC for two-area systems including PV and WECS. The dynamic performance of the proposed adaptive LFC was validated under different disturbances, such as the load variation and the intermittent nature of the WECS. In addition, the proposed controller was applied to stabilize a hybrid thermal-PV system. The controller successfully enhanced the system response under different types of disturbances. Moreover, the dynamic behavior of the proposed adaptive controller was validated through comparison with two optimized classical controllers. The proposed controller decreases the oscillation of the system frequency by around 35% less than the optimized one. Furthermore, the reliability of the proposed controller was proved through enhancing the performance indices such as IAE, ITAE, ISE, and ISTE. Finally, sensitivity analysis against parameters changing of the hybrid thermal-PV system was carried out to verify the superiority of the proposed adaptive controller based LFC over other classical schemes proposed in the literature.
Author Contributions
Conceptualization, M.I.M. and M.A.A.; methodology, M.A.A., M.M.; software, M.M.; validation, M.A.A., M.I.M. and M.M.; formal analysis, M.A.A., M.M.; investigation, M.M.; resources, M.I.M.; data curation, M.M.; writing—original draft preparation, M.A.A., M.A.S., M.M.; writing—review and editing, M.A.S.; visualization, M.A.S.; supervision, M.I.M.; project administration, M.I.M.; funding acquisition, M.A.S. All authors have read and agreed to the published version of the manuscript.
Funding
This research is funded by Future University in Egypt (FUE).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Taher, S.A.; Hematti, R.; Abdolalipour, A.; Tabei, S.H. Optimal Decentralized Load Frequency Control Using HPSO Algorithms in Deregulated Power Systems. Am. J. Appl. Sci. 2008, 5, 1167–1174. [Google Scholar] [CrossRef] [Green Version]
- Khuntia, S.R.; Panda, S. Simulation study for automatic generation control of a multi-area power system by ANFIS approach. Appl. Soft Comput. 2012, 12, 333–341. [Google Scholar] [CrossRef]
- Cam, E.; Kocaarslan, I. Load frequency control in two area power systems using fuzzy logic controller. Energy Convers. Manag. 2005, 46, 233–243. [Google Scholar] [CrossRef]
- Demiroren, A.; Yesil, E. Automatic generation control with fuzzy logic controllers in the power system including SMES units. Electr. Power Energy Syst. 2004, 26, 291–305. [Google Scholar] [CrossRef]
- Khodabakhshian, A.; Hooshmand, R. A new PID controller design for automatic generation control of hydro power systems. Electr. Power Energy Syst. 2010, 32, 375–382. [Google Scholar] [CrossRef]
- Alomoush, M.I. Load frequency control and automatic generation control using fractional-order controllers. Arch. Elektrotechnik 2010, 91, 357–368. [Google Scholar] [CrossRef]
- Saikia, L.C.; Nanda, J.; Mishra, S. Performance comparison of several classical controllers in AGC for multi-area interconnected thermal system. Electr. Power Energy Syst. 2011, 33, 394–401. [Google Scholar] [CrossRef]
- Shabani, H.; Vahidi, B.; Ebrahimpour, M. A robust PID controller based on imperialist competitive algorithm for load-frequency control of power systems. ISA Trans. 2013, 52, 88–95. [Google Scholar] [CrossRef]
- Zeynelgil, H.L.; Demiroren, A.; Sengor, N.S. The application of ANN technique to automatic generation control for multi area system. Electr. Power Energy Syst. 2002, 24, 345–354. [Google Scholar] [CrossRef]
- Prasanth, B.V.; Kumar, S.J. Load frequency control for a two area interconnected power system using robust genetic algorithm controller. J. Theor. Appl. Inf. Technol. 2008, 4, 1204–1212. [Google Scholar]
- Ali, E.; Abd-Elazim, S. Bacteria foraging optimization algorithm based load frequency controller for interconnected power system. Int. J. Electr. Power Energy Syst. 2011, 33, 633–638. [Google Scholar] [CrossRef]
- Mathur, H.D.; Manjunath, H.V. Frequency stabilization using fuzzy logic based controller for multi-area power system. South Pac. J. Nat. Appl. Sci. 2007, 25, 22–29. [Google Scholar] [CrossRef] [Green Version]
- Sameh, M.A.; Marei, M.I.; Badr, M.A.; Attia, M.A. An optimized PV control system based on the Emperor Penguin Optimizer. Energies 2021, 14, 751. [Google Scholar] [CrossRef]
- Mokhtar, M.; Marei, M.I.; El-Sattar, A.A. Improved Current Sharing Techniques for DC Microgrids. Electr. Power Compon. Syst. 2018, 46, 757–767. [Google Scholar] [CrossRef]
- Mohapatra, A.; Nayak, B.; Das, P.; Mohanty, K.B. A review on MPPT techniques of PV system under partial shading condition. Renew. Sustain. Energy Rev. 2017, 80, 854–867. [Google Scholar] [CrossRef]
- Sameh, M.A.; Badr, M.A.; Badr, M.A.L.; Marei, M.I.; Attia, M.A. Optimized PIA Controller for Photovoltaic System Using Hybrid Particle Swarm Optimization and Cuttlefish Algorithms. In Proceedings of the IEEE Conference on Renewable Energy Research and Applications (ICRERA), Paris, France, 14–17 October 2018; pp. 1102–1108. [Google Scholar]
- Parmar, K.P.S.; Majhi, S.; Kothari, D.P. Multi-area load frequency control in a power system using optimal output feedback method. In Proceedings of the 2008 5th International Conference on the European Electricity Market, Lisboa, Portugal, 28–30 May 2008; pp. 1–5. [Google Scholar]
- Juang, C.; Lu, C. Power system load frequency control by genetic fuzzy gain scheduling controller. J. Chin. Inst. Eng. 2005, 28, 1013–1018. [Google Scholar] [CrossRef]
- Sahu, R.K.; Panda, S.; Biswal, A.; Sekhar, G.C. Design and analysis of tilt integral deriva-tive controller with filter for load frequency control of multi- area interconnected power systems. ISA Trans. 2015, 61, 251–264. [Google Scholar] [CrossRef] [PubMed]
- Sharifi, A.; Sabahi, K.; Shoorehdeli, M.A.; Nekoui, M.; Teshnehlab, M. Load frequency control in interconnected power system using multi-objective PID controller. In Proceedings of the 2008 IEEE Conference on Soft Computing in Industrial Applications, Muroran, Japan, 25–27 June 2008; pp. 217–221. [Google Scholar]
- Mohanty, B.; Panda, S.; Hota, P.K. Differential evolution algorithm based automatic generation control for in-terconnected power systems with non-linearity. Alex. Eng. J. 2014, 53, 537–552. [Google Scholar] [CrossRef] [Green Version]
- Padhan, D.G.; Majhi, S. A new control scheme for PID load frequency controller of single-area and multi-area power systems. ISA Trans. 2013, 52, 242–251. [Google Scholar] [CrossRef] [PubMed]
- Padhan, S.; Sahu, R.K.; Panda, S. Application of Firefly Algorithm for Load Frequency Control of Multi-area Interconnected Power System. Electr. Power Components Syst. 2014, 42, 1419–1430. [Google Scholar] [CrossRef]
- Rout, U.K.; Sahu, R.K.; Panda, S. Design and analysis of differential evolution algorithm based automatic generation control for interconnected power system. Ain Shams Eng. J. 2013, 4, 409–421. [Google Scholar] [CrossRef] [Green Version]
- Sahu, R.K.; Panda, S.; Padhan, S. Optimal gravitational search algorithm for automatic generation control of interconnected power systems. Ain Shams Eng. J. 2014, 5, 721–733. [Google Scholar] [CrossRef] [Green Version]
- Shayeghi, H.; Jalili, A.; Shayanfar, H. Multi-stage fuzzy load frequency control using PSO. Energy Convers. Manag. 2008, 49, 2570–2580. [Google Scholar] [CrossRef]
- Saxena, S.; Hote, Y.V. Decentralized PID load frequency control for perturbed multi-area power systems. Int. J. Electr. Power Energy Syst. 2016, 81, 405–415. [Google Scholar] [CrossRef]
- Shankar, G.; Mukherjee, V. Quasi oppositional harmony search algorithm based controller tuning for load frequency control of multi-source multi-area power system. Int. J. Electr. Power Energy Syst. 2016, 75, 289–302. [Google Scholar] [CrossRef]
- Topno, P.N.; Chanana, S. Non-integer order control for LFC problem of two-area thermal power system with GRC. In Proceedings of the International Conference on Innovations in Electrical, Electronics, Instrumentation and Media Technology (ICEEIMT), Coimbatore, India, 3–4 February 2017. [Google Scholar]
- Debbarma, S.; Dutta, A. Utilizing electric vehicles for LFC in restructured power systems using fractional order controller. IEEE Trans. Smart Grid 2016, 8, 2554–2564. [Google Scholar] [CrossRef]
- Guha, D.; Roy, P.K.; Banerjee, S. Multi-verse optimisation: A novel method for solution of load frequency control problem in power system. IET Gener. Transm. Distrib. 2017, 11, 3601–3611. [Google Scholar] [CrossRef]
- Elsaied, M.M.; Attia, M.; Mostafa, M.A.; Mekhamer, S. Application of Different Optimization Techniques to Load Frequency Control with WECS in a Multi-Area System. Electr. Power Compon. Syst. 2018, 46, 739–756. [Google Scholar] [CrossRef]
- Dash, P.; Saikia, L.C.; Sinha, N. Automatic generation control of multi area thermal system using Bat algorithm optimized PD–PID cascade controller. Int. J. Electr. Power Energy Syst. 2015, 68, 364–372. [Google Scholar] [CrossRef]
- Tedesco, F.; Casavola, A. Load/Frequency Control in the presence of Renewable Energy Systems: A Reference-Offset Governor approach. IFAC-PapersOnLine 2020, 53, 12548–12553. [Google Scholar] [CrossRef]
- Nandar, C.S.A. Robust PI control of smart controllable load for frequency stabilization of microgrid power system. Renew. Energy 2013, 56, 16–23. [Google Scholar] [CrossRef]
- Lopes, J.P.; Hatziargyriou, N.; Mutale, J.; Djapic, P.; Jenkins, N. Integrating distributed generation into electric power sys-tems: A review of drivers, challenges and opportunities. Electr. Power Syst. Res. 2007, 77, 1189–1203. [Google Scholar] [CrossRef] [Green Version]
- Mokhtar, M.; Marei, M.I.; El-Sattar, A.A. An Adaptive Droop Control Scheme for DC Microgrids Integrating Sliding Mode Voltage and Current Controlled Boost Converters. IEEE Trans. Smart Grid 2019, 10, 1685–1693. [Google Scholar] [CrossRef]
- Ahn, S.; Haas, K.A.; Neary, V.S. Dominant Wave Energy Systems and Conditional Wave Resource Characterization for Coastal Waters of the United States. Energies 2020, 13, 3041. [Google Scholar] [CrossRef]
- Marei, M.I.; Mokhtar, M.; El-Sattar, A.A. MPPT strategy based on speed control for AWS-based wave energy conversion system. Renew. Energy 2015, 83, 305–317. [Google Scholar] [CrossRef]
- Zeng, G.-Q.; Xie, X.-Q.; Chen, M.-R. An Adaptive Model Predictive Load Frequency Control Method for Multi-Area Interconnected Power Systems with Photovoltaic Generations. Energies 2017, 10, 1840. [Google Scholar] [CrossRef] [Green Version]
- Abd-Elazim, S.; Ali, E.S. Load frequency controller design of a two-area system composing of PV grid and thermal generator via firefly algorithm. Neural Comput. Appl. 2016, 30, 607–616. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).