

De-Loaded Technique Enhanced by Fuzzy Logic Controller to Improve the Resilience of Microgrids Based on Wind Energy and Energy Storage Systems



Abstract
:1. Introduction
1.1. General Contexte
1.2. Related Works
1.3. The Main Contribution
- ― Developing a flexible DT-FLC to improve the traditional LVRT control and PFR;
- ― Limiting the low frequency by respecting the frequency limit droop given by the IEEE standard (IEEE Std 1547–2018);
- ― Designing an MG which can successfully participate in the auxiliary services, mainly voltage and frequency control;
- ― Minimizing the DC-link voltage oscillations under unbalanced microgrid conditions, which allows protection of the rectifier and the inverter.
1.4. Paper Arrangement
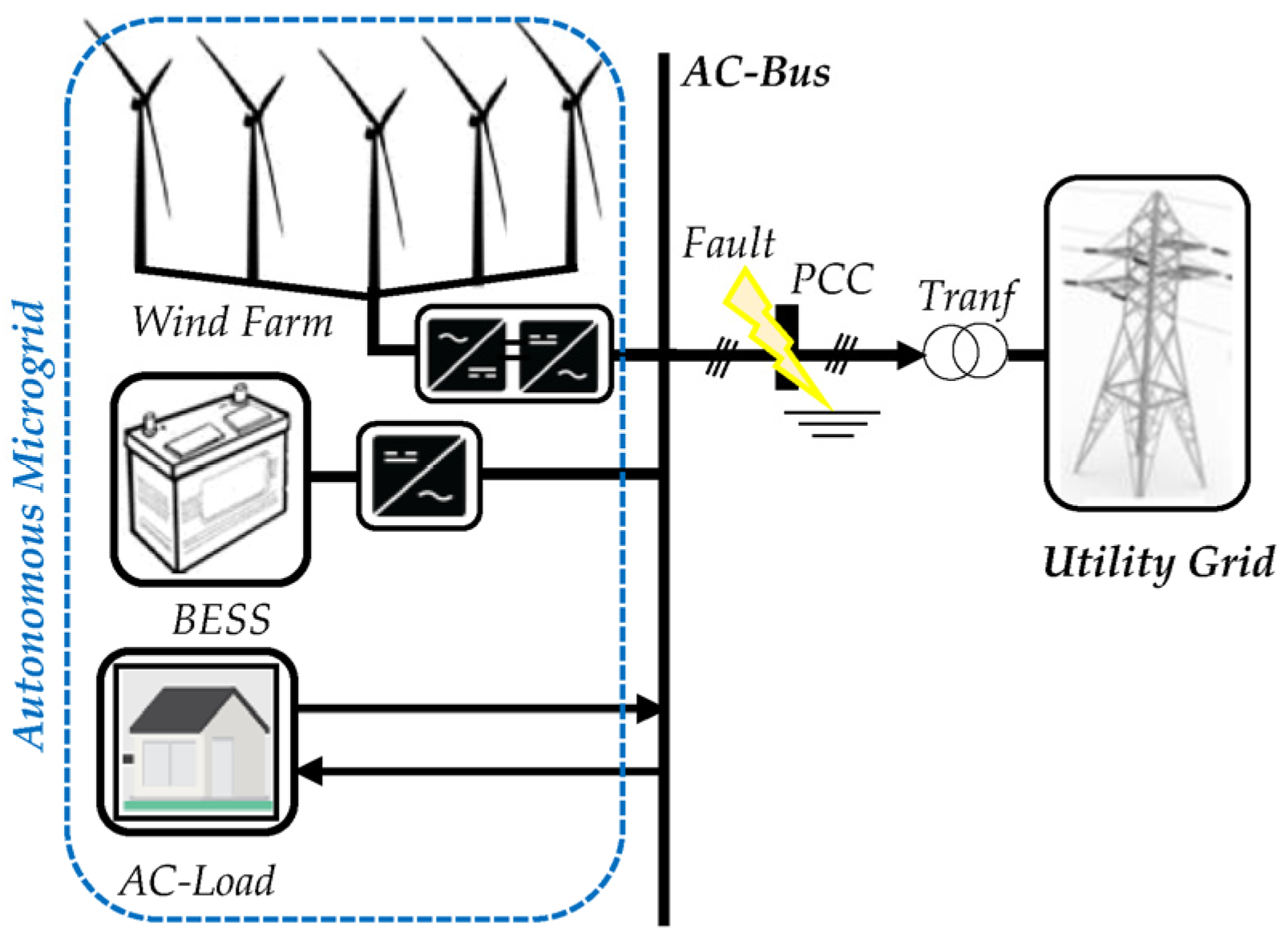
2. Mathematical Modeling of the Microgrid
2.1. Wind Turbine-Mathematical Modeling
2.2. Permanent Magnet Synchronous Generator-Side Converter Model
2.3. DC-Link Voltage-Mathematical Modeling
2.4. Grid-Side and Battery Energy Storage System-Mathematical Modeling
3. The Proposed De-Loaded-Fuzzy Logic Control
3.1. De-Loaded-LVRT Technique
3.2. Fuzzy-Logic Controller Design
4. Grid Code and Low-Voltage Ride-Through Requirements
4.1. Grid Code Requirement and Fault Ride-Through
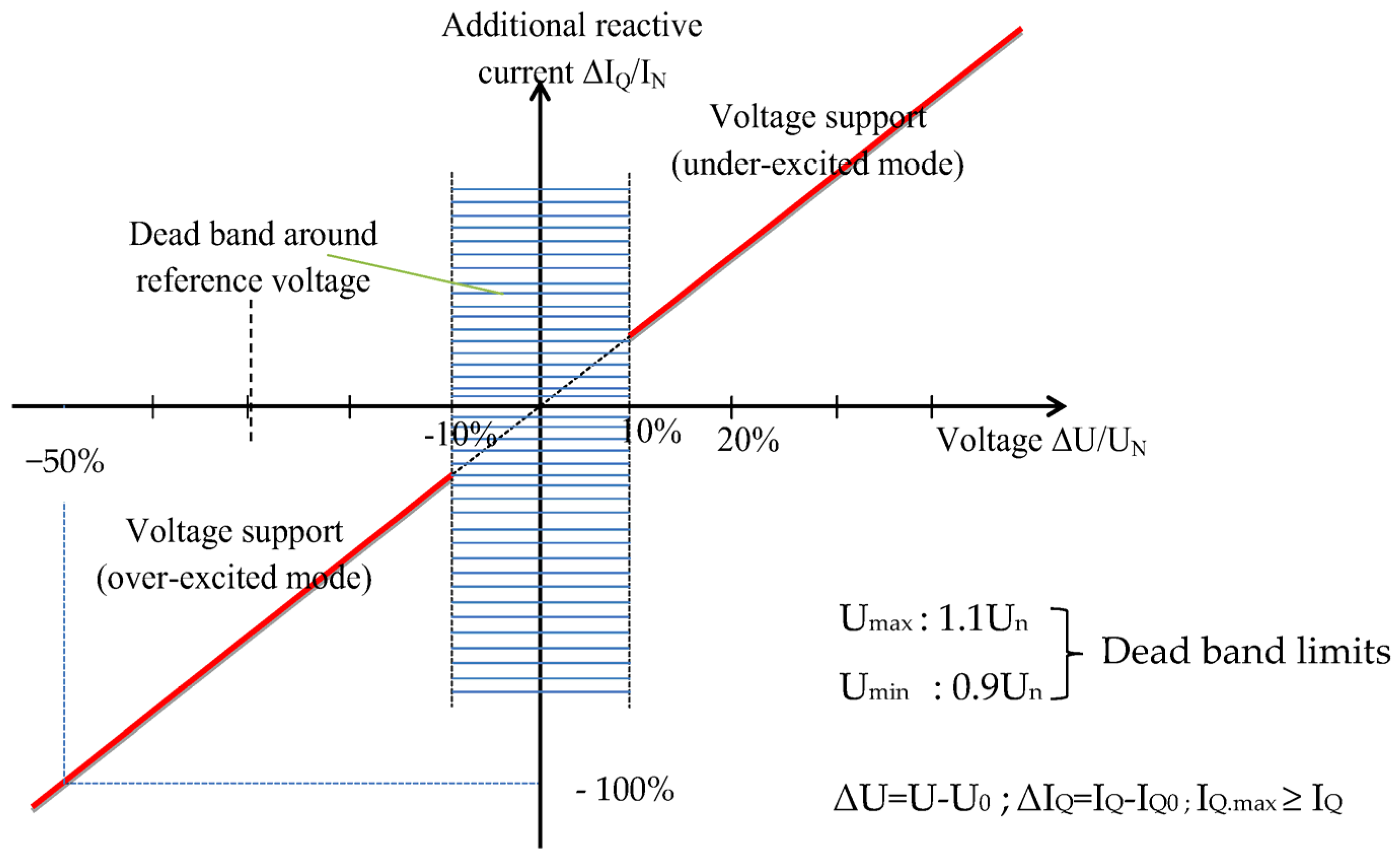
4.2. Low-Voltage Ride-Through Capability
5. Primary Frequency Regulation in an Islanded Microgrid Case
Primary Frequency Regulation
6. Simulation Results
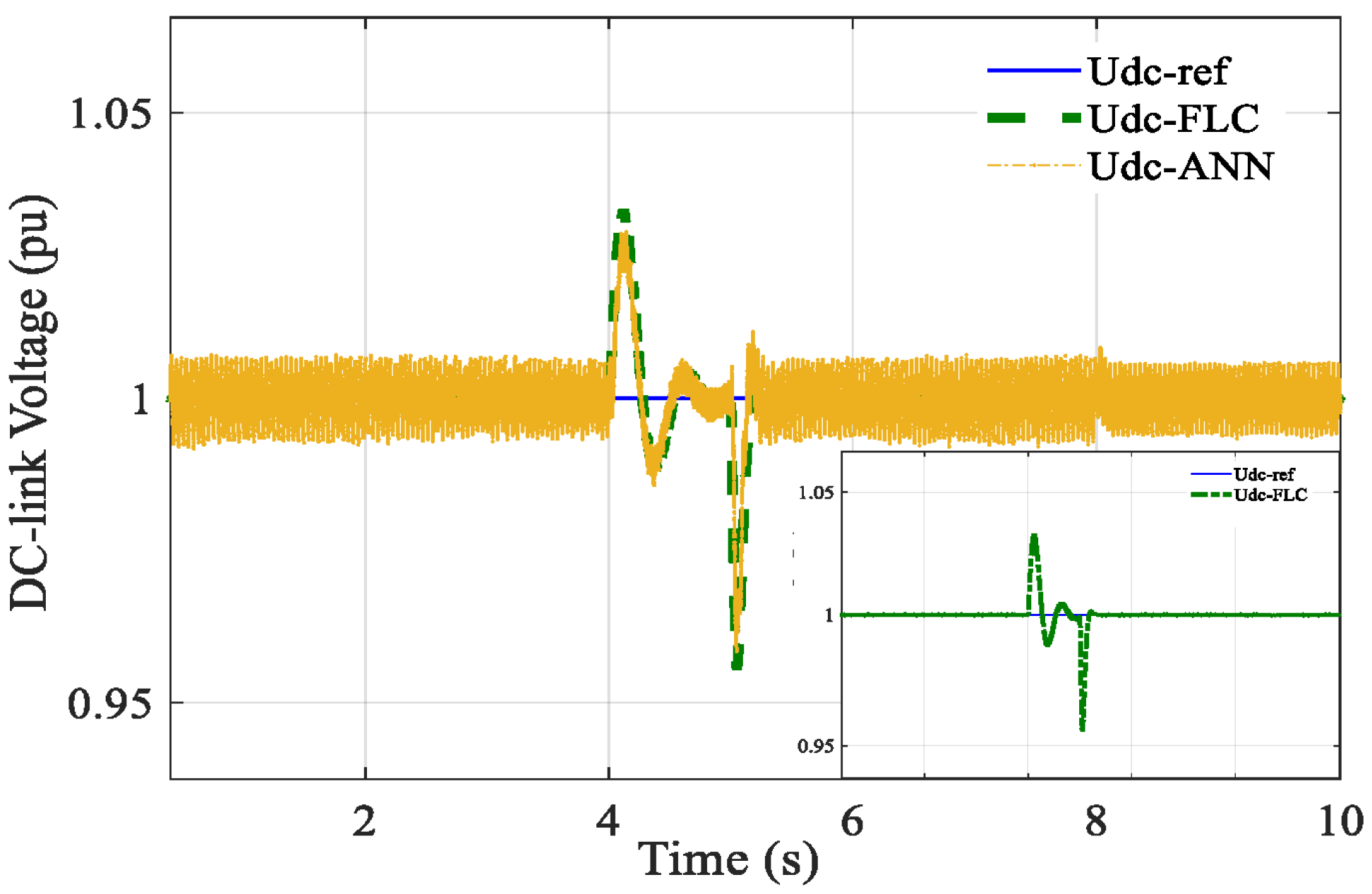
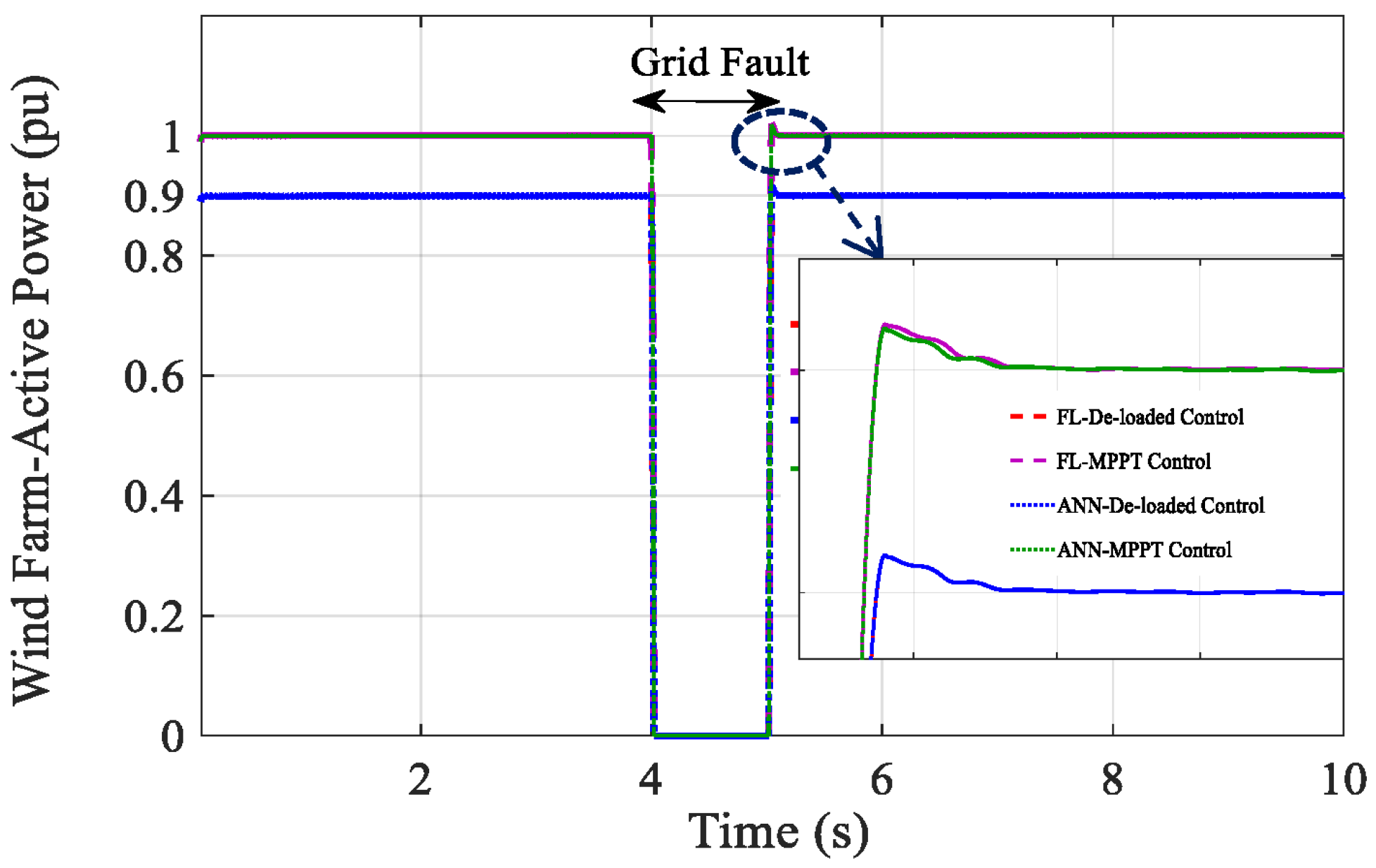
6.1. Case 1: Grid-Connected Microgrid under LVRT Mode
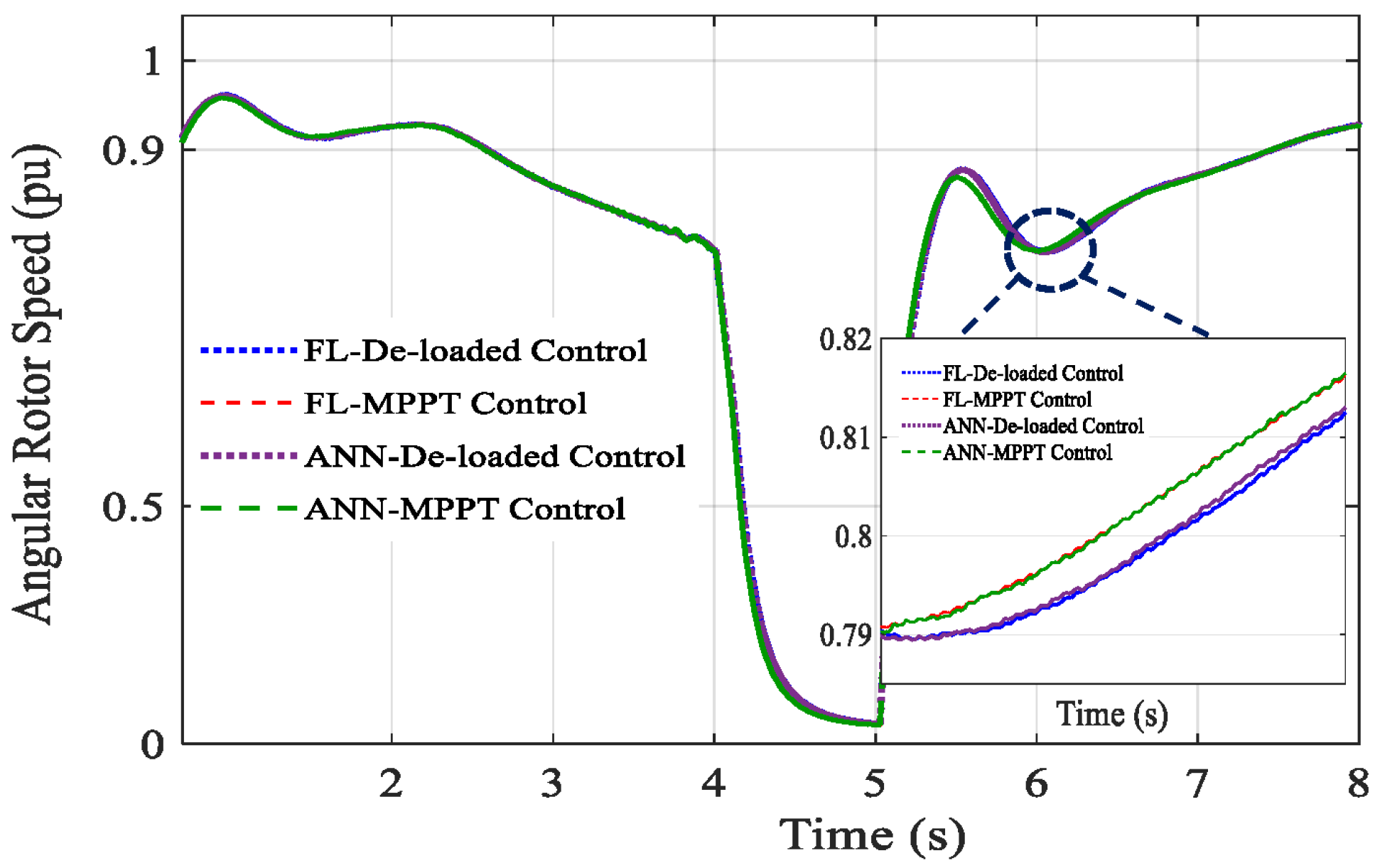
6.2. Case 2: Islanded Microgrid Mode
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Barra, P.H.A.; de Carvalho, W.C.; Menezes, T.S.; Fernandes, R.A.S.; Coury, D.V. A review on wind power smoothing using high-power energy storage systems. Renew. Sustain. Energy Rev. 2021, 137, 110455. [Google Scholar] [CrossRef]
- Kiehbadroudinezhad, M.; Merabet, A.; Abo-Khalil, A.G.; Salameh, T.; Ghenai, C. Intelligent and optimized microgrids for future supply power from renewable energy resources: A review. Energies 2022, 15, 3359. [Google Scholar] [CrossRef]
- Djilali, L.; Sanchez, E.N.; Ornelas-Tellez, F.; Avalos, A.; Belkheiri, M. Improving microgrid low-voltage ride-through capacity using neural control. IEEE Syst. J. 2019, 14, 2825–2836. [Google Scholar] [CrossRef]
- de Carvalho, W.C.; Bataglioli, R.P.; Fernandes, R.A.; Coury, D.V. Fuzzy-based approach for power smoothing of a full-converter wind turbine generator using a supercapacitor energy storage. Electr. Power Syst. Res. 2020, 184, 106287. [Google Scholar] [CrossRef]
- Kim, C.; Kim, W. Low-voltage ride-through coordinated control for PMSG wind turbines using de-loaded operation. IEEE Access 2021, 9, 66599–66606. [Google Scholar] [CrossRef]
- Kharrich, M.; Kamel, S.; Abdeen, M.; Mohammed, O.H.; Akherraz, M.; Khurshaid, T.; Rhee, S.-B. Developed approach based on equilibrium optimizer for optimal design of hybrid PV/wind/diesel/battery microgrid in Dakhla, Morocco. IEEE Access 2021, 9, 13655–13670. [Google Scholar] [CrossRef]
- Hossain, A.; Chakrabortty, R.K.; Ryan, M.J.; Pota, H.R. Energy management of community energy storage in grid-connected microgrid under uncertain real-time prices. Sustain. Cities Soc. 2021, 66, 102658. [Google Scholar] [CrossRef]
- Roy, S.D.; Debbarma, S. Inertia emulation using battery management system in a low inertia grid with HVDC links. In Proceedings of the 2nd International Conference on Power, Energy and Environment: Towards Smart Technology (ICEPE), Shillong, India, 1–2 June 2018; pp. 1–9. [Google Scholar]
- Kotb, K.M.; Elmorshedy, M.F.; Salama, H.S.; Dán, A. Enriching the stability of solar/wind DC microgrids using battery and superconducting magnetic energy storage based fuzzy logic control. J. Energy Storage 2022, 45, 103751. [Google Scholar] [CrossRef]
- Roslan, M.; Hannan, M.; Ker, P.J.; Uddin, M. Microgrid control methods toward achieving sustainable energy management. Appl. Energy 2019, 240, 583–607. [Google Scholar] [CrossRef]
- Salyani, P.; Zare, K.; Abapour, M.; Safari, A.; Shafie-Khah, M. A general mathematical model for LVRT capability assessment of DER-penetrated distribution networks. IEEE Access 2020, 8, 125521–125533. [Google Scholar] [CrossRef]
- Yan, W.; Wang, X.; Gao, W.; Gevorgian, V. Electro-mechanical modeling of wind turbine and energy storage systems with enhanced inertial response. J. Mod. Power Syst. Clean Energy 2020, 8, 820–830. [Google Scholar] [CrossRef]
- Mahrouch, A.; Ouassaid, M. Primary frequency regulation based on deloaded control, ANN, and 3D-fuzzy logic controller for hybrid autonomous microgrid. Technol. Econ. Smart Grids Sustain. Energy 2022, 7, 1. [Google Scholar] [CrossRef]
- Errami, Y.; Maaroufi, M.; Cherkaoui, M.; Ouassaid, M. Maximum power point tracking strategy and direct torque control of permanent magnet synchronous generator wind farm. In Proceedings of the 2012 IEEE International Conference on Complex Systems (ICCS), Agadir, Morocco, 5–6 November 2012. [Google Scholar]
- Errami, Y.; Ouassaid, M.; Maaroufi, M. Modeling and variable structure power control of PMSG based variable speed wind energy conversion system. J. Optoelectron. Adv. Mater. 2013, 15, 1248–1255. [Google Scholar]
- Errami, Y.; Ouassaid, M.; Maaroufi, M. A performance comparison of a nonlinear and a linear control for grid connected PMSG wind energy conversion system. Int. J. Electr. Power Energy Syst. 2015, 68, 180–194. [Google Scholar] [CrossRef]
- Chatri, C.; Ouassaid, M.; Labbadi, M.; Errami, Y. Integral-type terminal sliding mode control approach for wind energy conversion system with uncertainties. Comput. Electr. Eng. 2022, 99, 107775. [Google Scholar] [CrossRef]
- Wang, J.; Ben, Y.; Zhang, J.; Feng, H. Low voltage ride-through control strategy for a wind turbine with permanent magnet synchronous generator based on operating simultaneously of rotor energy storage and a discharging resistance. Energy Rep. 2022, 8, 5861–5870. [Google Scholar] [CrossRef]
- Liu, Z.; Zhang, Z.; Zhuo, R.; Wang, X. Optimal operation of independent regional power grid with multiple wind-solar-hydro-battery power. Appl. Energy 2019, 235, 1541–1550. [Google Scholar] [CrossRef]
- Salman, U.T.; Al-Ismail, F.S.; Khalid, M. Optimal sizing of battery energy storage for grid-connected and isolated wind-penetrated microgrid. IEEE Access 2020, 8, 91129–91138. [Google Scholar] [CrossRef]
- Boyle, J.; Littler, T.; Muyeen, S.M.; Foley, A.M. An alternative frequency-droop scheme for wind turbines that provide primary frequency regulation via rotor speed control. Int. J. Electr. Power Energy Syst. 2021, 133, 107219. [Google Scholar] [CrossRef]
- Ismail, D.; Fadili, A.E.; Kasmi, D.E.; Stitou, M. Evaluation of the LVRT requirement for wind farms specified in the Moroccan grid code. In Proceedings of the 2018 Renewable Energies, Power Systems & Green Inclusive Economy (REPS-GIE), Casablanca, Morocco, 23–24 April 2018. [Google Scholar]
- E.ON Netz GmbH. Netzanschlussregeln für Hoch- und Höchstspannung. 2006. Available online: https://www.n-ergie-netz.de/public/remotemedien/media/mdn/infothek_1/veroeffentlichungen/weitere_veroeffentlichungen/pflichtveroeffentlichungen/kraftnav/NetzanschlussregelnEON1.pdf (accessed on 24 October 2022).
- Gao, D.W.; Wu, Z.; Yan, W.; Zhang, H.; Yan, S.; Wang, X. Comprehensive frequency regulation scheme for permanent magnet synchronous generator-based wind turbine generation system. IET Renew. Power Gener. 2019, 13, 234–244. [Google Scholar] [CrossRef]
- IEEE Std 1547-2018; IEEE Standard for Interconnection and Interoperability of Distributed Energy Resources with Associated Electric Power Systems Interfaces. IEEE: Picastaway, NJ, USA, 2018.
- Aboubakrc, M.E. Amélioration de L’intégration de L’énergie Eolienne au Réseau Electrique de Transport Marocain. Ph.D. Thesis, Centre d’Etudes Doctorales, Sciences et Techniques de l’Ingénieur Faculté des Sciences et Techniques–Fès, Fès, Morocco, 2018. Available online: https://toubkal.imist.ma/bitstream/handle/123456789/11750/THESE_MAKRINI.pdf?sequence=1 (accessed on 24 October 2022).














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| i\u | BN | SN | Z | SP | BP |
|---|---|---|---|---|---|
| BN | Z | SN | SN | BN | BN |
| SN | SP | Z | SN | BN | BN |
| Z | SP | SP | Z | SN | SN |
| SP | BP | BP | SP | Z | SN |
| BP | BP | BP | SP | SP | Z |
| Primary Frequency Droop (Hz) | Voltage Droop (%) and System Stability after the Fault | |||
|---|---|---|---|---|
| Controller | FLC | ANN | Voltage Droop | System Stability |
| De-loaded technique | −0.0007 | −0.02 | −70 | High |
| MPPT Technique | −0.0038 | −0.022 | −80 | Medium |
| Parameters | Description | Value |
|---|---|---|
| Vn | Nominal Voltage | 660 V |
| P | Active Power | 2 MW |
| Udc | DC-Link Voltage | 1500 V |
| ωr | Rated angular rotor speed | 2.57 rad/s |
| f | Rated Frequency | 50 Hz |
| C | DC-link Capacitor | 4400 μF |
| vw | Nominal Wind Speed | 12.4 m/s |
| ρ | Air density | 1.225 kg/m3 |
| A | Swept Area | 4775.94 m² |
| Lq, Ld | Stator d-axis and q-axis inductance | 0.0003 H |
| R | Resistance of the Stator | 0.008 Ω |
| p | Pole pairs | 60 |
| ψf | Permanent magnet flux | 0.192 Wb |
| Parameters | Description | Value |
|---|---|---|
| In | Rated Battery Current | 120 A |
| nb | Battery Cell Number | 10 |
| Ri | Interne Resistance | 0.008 Ω |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mahrouch, A.; Ouassaid, M.; Cabrane, Z.; Lee, S.H. De-Loaded Technique Enhanced by Fuzzy Logic Controller to Improve the Resilience of Microgrids Based on Wind Energy and Energy Storage Systems. Energies 2023, 16, 291. https://doi.org/10.3390/en16010291
Mahrouch A, Ouassaid M, Cabrane Z, Lee SH. De-Loaded Technique Enhanced by Fuzzy Logic Controller to Improve the Resilience of Microgrids Based on Wind Energy and Energy Storage Systems. Energies. 2023; 16(1):291. https://doi.org/10.3390/en16010291
Chicago/Turabian StyleMahrouch, Assia, Mohammed Ouassaid, Zineb Cabrane, and Soo Hyoung Lee. 2023. "De-Loaded Technique Enhanced by Fuzzy Logic Controller to Improve the Resilience of Microgrids Based on Wind Energy and Energy Storage Systems" Energies 16, no. 1: 291. https://doi.org/10.3390/en16010291
APA StyleMahrouch, A., Ouassaid, M., Cabrane, Z., & Lee, S. H. (2023). De-Loaded Technique Enhanced by Fuzzy Logic Controller to Improve the Resilience of Microgrids Based on Wind Energy and Energy Storage Systems. Energies, 16(1), 291. https://doi.org/10.3390/en16010291