
Cost-Optimal Aggregated Electric Vehicle Flexibility for Demand Response Market Participation by Workplace Electric Vehicle Charging Aggregators

Abstract
:1. Introduction
- A cost-optimal online feedback MPC model is proposed for EV charging site aggregators to profit from the DA energy market under forecast uncertainty by exploiting the aggregated EV flexibility in real time;
- A “value-stacked” cost function including multiple objectives is proposed for the aggregator to jointly consider demand charge management, TOU energy costs, DA market revenue, and EV charging service revenue;
- A detailed DA market bidding strategy which allows utilizing real-time aggregated EV flexibility to avoid under-performance during demand reduction is proposed.
2. Materials and Methods
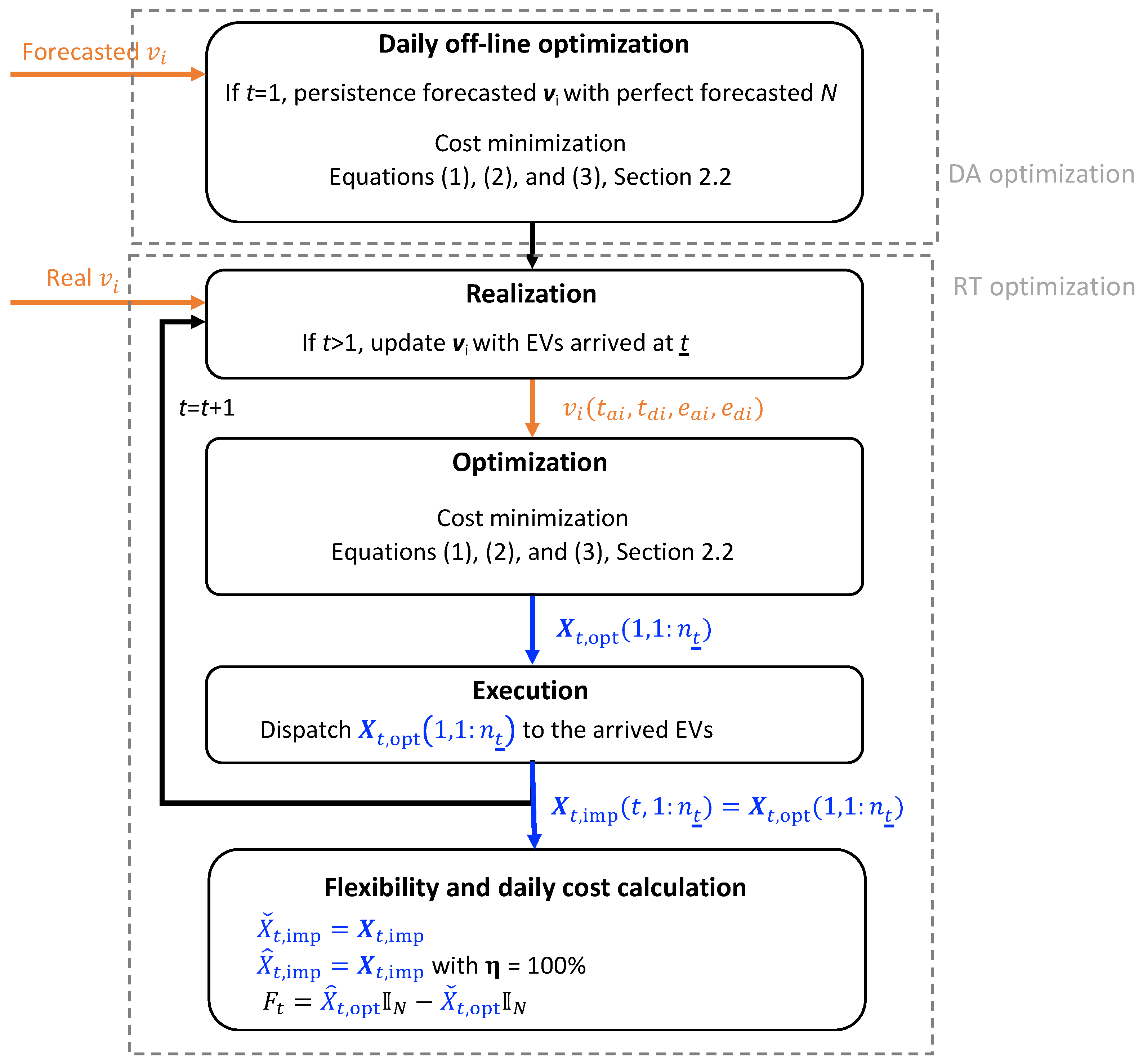
2.1. Offline/Online Optimization Model Overview
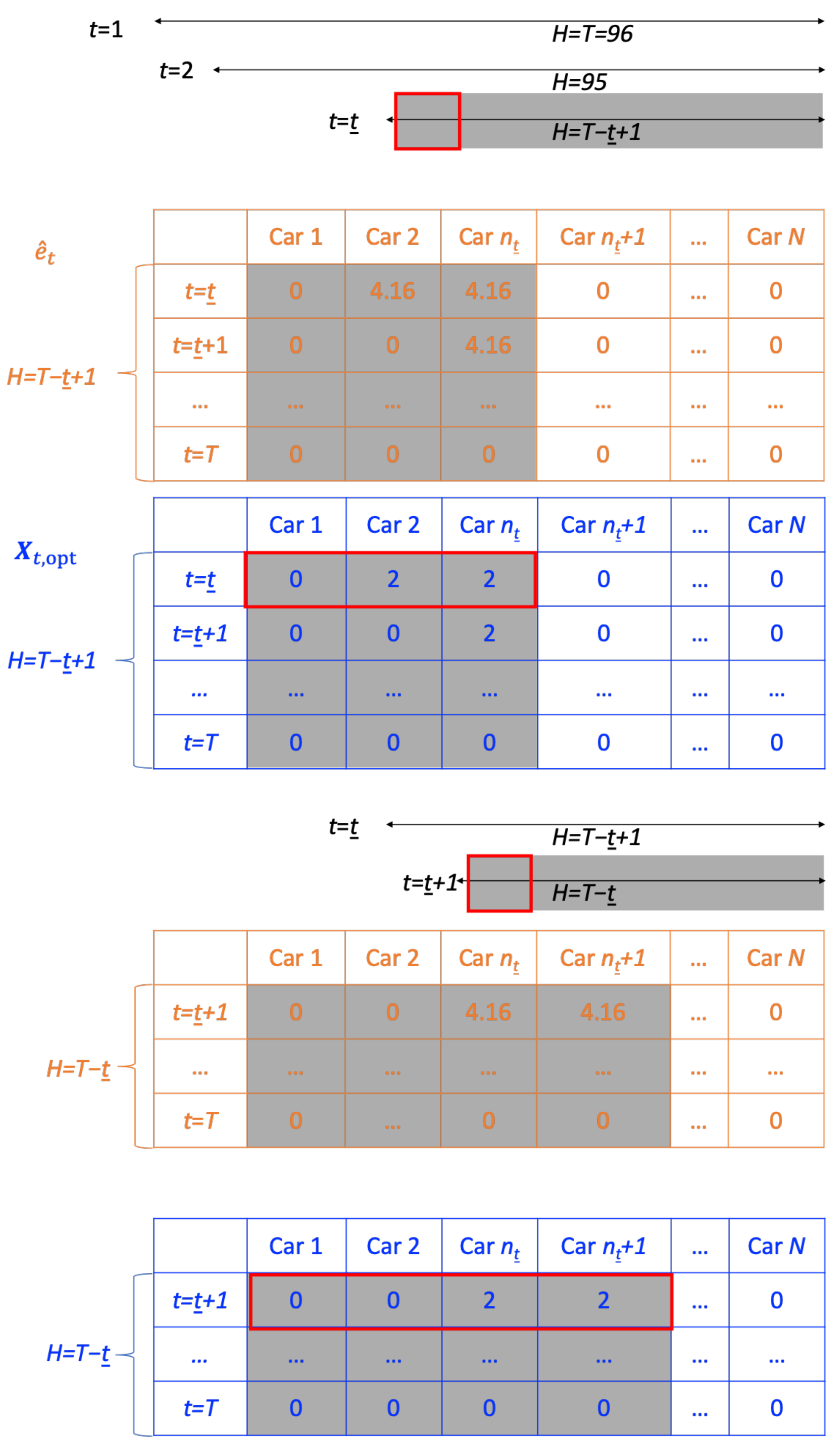
2.2. DA/RT MPC Algorithm
2.3. Bidding Strategy and Market Settlement for the DA Demand Response Market
2.4. Aggregated EV Flexibility
3. Results
3.1. Data and Algorithm
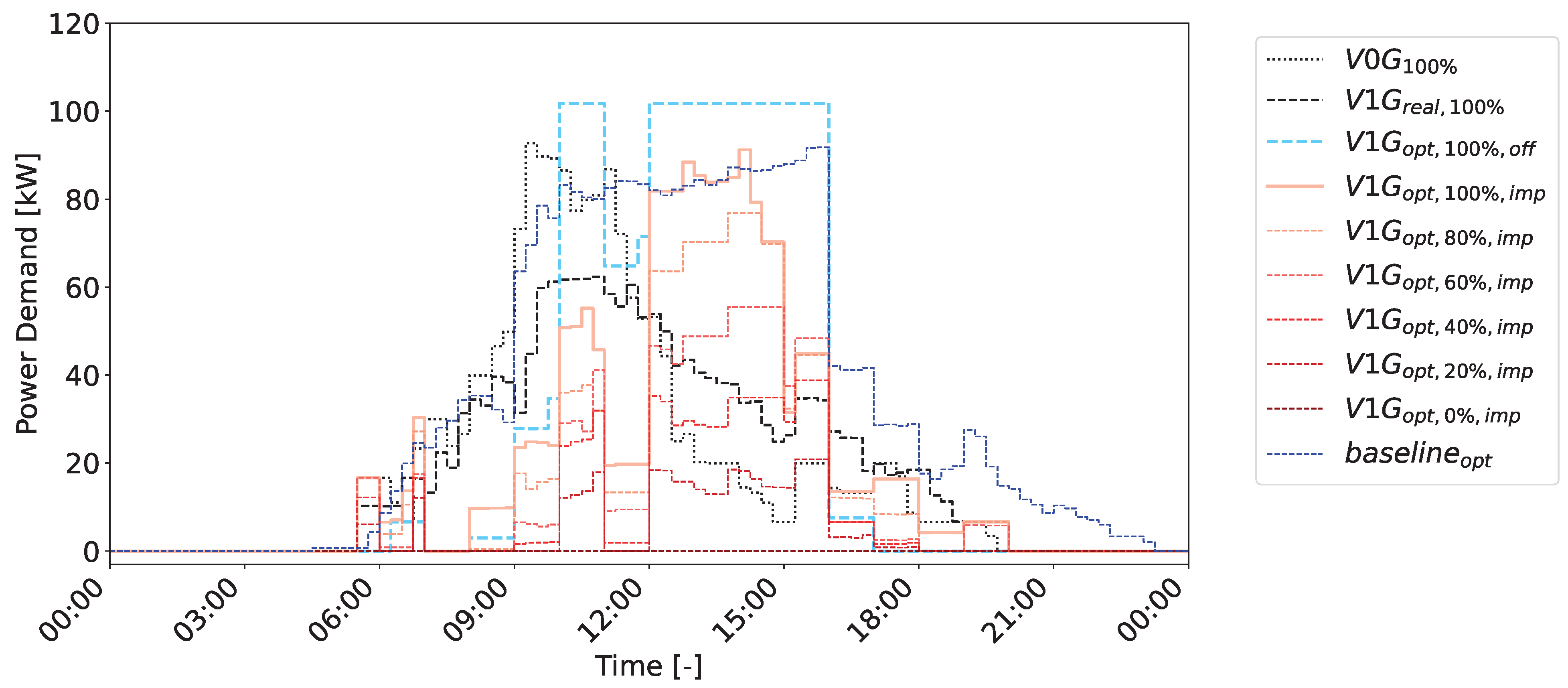
3.2. Daily Profile on 7 December 2022
3.2.1. EV Load and Demand Charges
3.2.2. Demand Response Market Revenue
3.2.3. Increasing Demand Response Market Revenue through Cost-Optimal Aggregated EV Flexibility
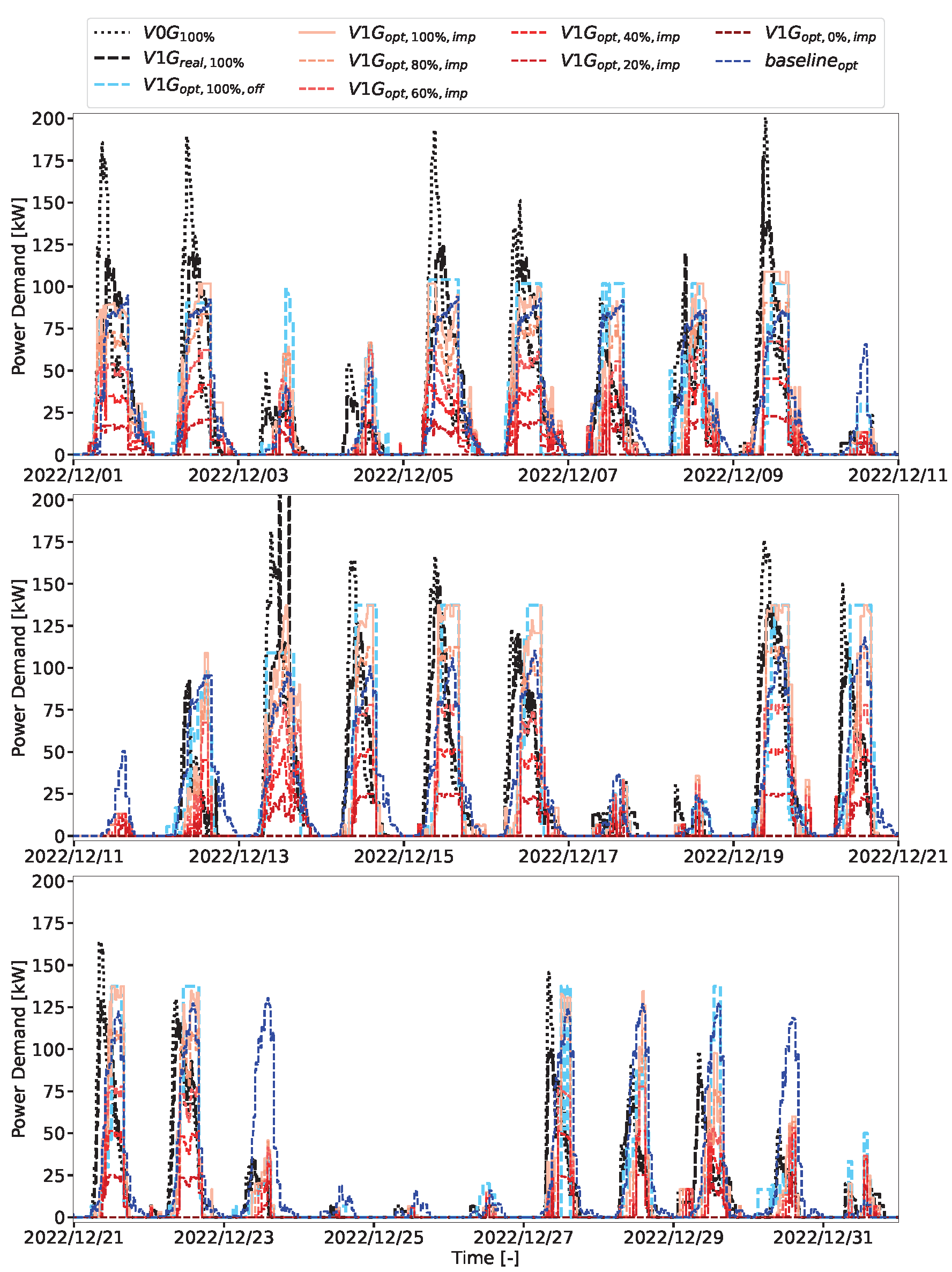
3.3. Monthly and Annual Cost Analysis
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| Symbol | Meaning | Unit |
| / | Floor/ceiling bid price for the energy market | USD/kWh |
| Bid price submitted to demand response market by aggregator | USD/kWh | |
| Day-ahead (DA) market demand response price | USD/kW | |
| Time-of-use retail energy price | USD/kWh | |
| Cost of EV charging billed to drivers | USD/kWh | |
| / | DA/RT locational marginal price | USD/kWh |
| / | Non-coincident demand/peak demand charge rate | USD/kW |
| DA | Day-ahead | - |
| Simulation time resolution: = 15 min | min | |
| / | EV arrival/departure energy | kWh |
| Maximum EV battery capacity | kWh | |
| Maximum charger interval charging capacity | kWh | |
| Service level (=EV energy delivered/requested by the driver) | % | |
| Aggregated EV flexibility region at time t | kWh | |
| H | The number of time steps in the MPC simulation horizon | - |
| / | Non-coincident demand/peak demand threshold | kWh |
| An N × 1 vector with all entries being one | - | |
| A 1 × − vector with all entries being one | - | |
| L | Baseline aggregator reference load in 15-minute resolution | kW |
| Hourly average of L, i.e., hourly baseline load | kW | |
| Hourly baseline load at hour h | kW | |
| The number of arrived cars at time t | - | |
| Aggregator bidding capacity | kW | |
| RT | Real time | - |
| DA market settlement, bid payment | USD | |
| DA market settlement, over/under performance | USD | |
| A time stamp of the day | - | |
| / | EV arrival/departure time | - |
| T | Number of intervals of the day: T = 96 | - |
| DA forecasted aggregated EV load series | kW | |
| Hourly average of , i.e., DA forecasted hourly load | kW | |
| DA forecasted hourly load at hour h | kW | |
| Optimization output EV dispatch matrix | kW | |
| Optimal dispatch matrix with 100% service level | kW | |
| Optimal dispatch matrix with minimum service level | kW | |
| z | Binary filter for peak hours (from 4 to 9 pm) | - |
| DA market binary filter for non-event/event hours | - |
Appendix A

References
- Tan, K.M.; Ramachandaramurthy, V.K.; Yong, J.Y. Integration of electric vehicles in smart grid: A review on vehicle to grid technologies and optimization techniques. Renew. Sustain. Energy Rev. 2016, 53, 720–732. [Google Scholar] [CrossRef]
- Bessa, R.J.; Matos, M.A. Economic and technical management of an aggregation agent for electric vehicles: A literature survey. Eur. Trans. Electr. Power 2012, 22, 334–350. [Google Scholar] [CrossRef]
- Geng, X.; Khargonekar, P.P. Electric vehicles as flexible loads: Algorithms to optimize aggregate behavior. In Proceedings of the 2012 IEEE Third International Conference on Smart Grid Communications (SmartGridComm), Tainan, Taiwan, 5–8 November 2012; IEEE: New York, NY, USA; pp. 430–435. [Google Scholar]
- Munshi, A.A.; Mohamed, Y.A.R.I. Extracting and defining flexibility of residential electrical vehicle charging loads. IEEE Trans. Ind. Inform. 2017, 14, 448–461. [Google Scholar] [CrossRef]
- Zhao, H.; Yan, X.; Ren, H. Quantifying flexibility of residential electric vehicle charging loads using non-intrusive load extracting algorithm in demand response. Sustain. Cities Soc. 2019, 50, 101664. [Google Scholar] [CrossRef]
- Hao, H.; Sanandaji, B.M.; Poolla, K.; Vincent, T.L. Aggregate flexibility of thermostatically controlled loads. IEEE Trans. Power Syst. 2014, 30, 189–198. [Google Scholar] [CrossRef]
- Plaum, F.; Ahmadiahangar, R.; Rosin, A.; Kilter, J. Aggregated demand-side energy flexibility: A comprehensive review on characterization, forecasting and market prospects. Energy Rep. 2022, 8, 9344–9362. [Google Scholar] [CrossRef]
- Villar, J.; Bessa, R.; Matos, M. Flexibility products and markets: Literature review. Electr. Power Syst. Res. 2018, 154, 329–340. [Google Scholar] [CrossRef]
- Knezović, K.; Marinelli, M.; Codani, P.; Perez, Y. Distribution grid services and flexibility provision by electric vehicles: A review of options. In Proceedings of the 2015 50th International Universities Power Engineering Conference (UPEC), Stroke-on-Trent, UK, 1–4 September 2015; IEEE: New York, NY, USA, 2015; pp. 1–6. [Google Scholar]
- Sevdari, K.; Calearo, L.; Andersen, P.B.; Marinelli, M. Ancillary services and electric vehicles: An overview from charging clusters and chargers technology perspectives. Renew. Sustain. Energy Rev. 2022, 167, 112666. [Google Scholar] [CrossRef]
- Diaz-Londono, C.; Colangelo, L.; Ruiz, F.; Patino, D.; Novara, C.; Chicco, G. Optimal strategy to exploit the flexibility of an electric vehicle charging station. Energies 2019, 12, 3834. [Google Scholar] [CrossRef]
- Zade, M.; You, Z.; Kumaran Nalini, B.; Tzscheutschler, P.; Wagner, U. Quantifying the Flexibility of Electric Vehicles in Germany and California—A Case Study. Energies 2020, 13, 5617. [Google Scholar] [CrossRef]
- Taha, F.A.; Vincent, T.; Bitar, E. An Efficient Method for Quantifying the Aggregate Flexibility of Plug-in Electric Vehicle Populations. arXiv 2022, arXiv:2207.07067. [Google Scholar] [CrossRef]
- Wang, B.; Zhao, D.; Dehghanian, P.; Tian, Y.; Hong, T. Aggregated electric vehicle load modeling in large-scale electric power systems. IEEE Trans. Ind. Appl. 2020, 56, 5796–5810. [Google Scholar] [CrossRef]
- Li, T.; Sun, B.; Chen, Y.; Ye, Z.; Low, S.H.; Wierman, A. Learning-based predictive control via real-time aggregate flexibility. IEEE Trans. Smart Grid 2021, 12, 4897–4913. [Google Scholar] [CrossRef]
- Yan, D.; Huang, S.; Chen, Y. Real-time Feedback Based Online Aggregate EV Power Flexibility Characterization. arXiv 2023, arXiv:2301.03342. [Google Scholar] [CrossRef]
- ISO 15118-1:2019; Road Vehicles—Vehicle to Grid Communication interface—Part 1: General Information and Use-Case Definition. ISO: Geneva, Switzerland, 2019. Available online: https://www.iso.org/obp/ui/en/#iso:std:iso:15118:-1:ed-2:v1:en (accessed on 1 February 2024).
- McClone, G.; Ghosh, A.; Khurram, A.; Washom, B.; Kleissl, J. Hybrid Machine Learning Forecasting for Online MPC of Work Place Electric Vehicle Charging. IEEE Trans. Smart Grid 2023, 15, 2. [Google Scholar] [CrossRef]
- Chen, Y.A.; Greenough, R.; Ferry, M.; Johnson, K.; Kleissl, J. Value stacking of a behind-the-meter utility-scale battery for demand response markets and demand charge management: Real-world operation on the UC San Diego campus. In Proceedings of the 2021 IEEE Power & Energy Society General Meeting (PESGM), Washington, DC, USA, 26–29 July 2021; IEEE: New York, NY, USA, 2021; pp. 1–6. [Google Scholar]
- CAISO. CAISO, Proxy Demand Resource (PDR) & Reliability Remand Response Resource (RDRR) Participation Overview. Available online: https://www.caiso.com/documents/pdr_rdrrparticipationoverviewpresentation.pdf (accessed on 1 February 2024).
- CAISO. Demand Reponse Net Benefits Test. 2023. Available online: https://www.caiso.com/Pages/documentsbygroup.aspx?GroupID=C751BDD9-704C-482C-B4F4-468BE2A92647 (accessed on 1 February 2024).
- CAISO. Business Practice Manual for Demand Response. 2020. Available online: https://bpmcm.caiso.com/BPM%20Document%20Library/Demand%20Response/BPM_for_Demand_Response_V3_clean.pdf (accessed on 1 February 2024).
- Ghosh, A.; Zapata, M.Z.; Silwal, S.; Khurram, A.; Kleissl, J. Effects of number of electric vehicles charging/discharging on total electricity costs in commercial buildings with time-of-use energy and demand charges. J. Renew. Sustain. Energy 2022, 14, 035701. [Google Scholar] [CrossRef]
- CAISO. CAISO OASIS. 2024. Available online: http://oasis.caiso.com/mrioasis/logon.do (accessed on 1 February 2024).
- Lee, Z.J.; Lee, G.; Lee, T.; Jin, C.; Lee, R.; Low, Z.; Chang, D.; Ortega, C.; Low, S.H. Adaptive charging networks: A framework for smart electric vehicle charging. IEEE Trans. Smart Grid 2021, 12, 4339–4350. [Google Scholar] [CrossRef]
- Liu, S.; Silwal, S.; Kleissl, J. Power and energy constrained battery operating regimes: Effect of temporal resolution on peak shaving by battery energy storage systems. J. Renew. Sustain. Energy 2022, 14, 014101. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Non-Coincident Demand Charge [USD] | Peak Demand Charge [USD] | TOU Energy Cost [USD] | Taxes [USD] | Net EV Service Cost [USD] | DA Demand Response Market Cost [USD] | Total Dispatched Energy [kWh] | EV Service Revenue + Demand Response Rewards [USD] | |
|---|---|---|---|---|---|---|---|---|
| 4976 | 1230 | 1733 | 573 | −678 | - | 16,075 | 678 | |
| 9111 | 2134 | 1749 | 865 | −670 | - | 16,127 | 670 | |
| 3473 | 1185 | 1720 | 482 | −675 | −1415 | 15,971 | 2090 | |
| 3473 | 2673 | 1748 | 570 | −664 | −648 | 16,075 | 1312 | |
| 2791 | 2140 | 1403 | 458 | −536 | −993 | 12,927 | 1529 | |
| 1969 | 1953 | 1054 | 356 | −401 | −1225 | 9695 | 1626 | |
| 1298 | 1308 | 703 | 237 | −267 | −1507 | 6464 | 1774 | |
| 652 | 770 | 351 | 125 | −133 | −1800 | 3232 | 1933 | |
| 0 | 0 | 0 | 0 | 0 | −2091 | 0 | 2091 |
| Forecasted Market Revenue [USD] | DA Market Settlement, Bid Payment, 100% Dispatch [USD] | DA Market Settlement, Ver/Under-Performance, 100% Dispatch [USD] | Total DA Market Settlement, 100% Dispatch [USD] | DA Market Settlement, Capacity Demonstrated, 80% Dispatch [USD] | DA Market Settlement, Over/Under-Performance, 80% Dispatch [USD] | Total DA Market Settlement, 80% Dispatch [USD] | Market Settlement Increment [USD] | EV Service Reduction Cost [USD] | |
|---|---|---|---|---|---|---|---|---|---|
| February | 211 | 169 | −42 | 126 | 181 | −22 | 159 | 32 | 105 |
| March | 333 | 242 | −113 | 130 | 258 | −65 | 194 | 64 | 137 |
| April | 503 | 335 | −187 | 148 | 360 | −129 | 231 | 83 | 146 |
| May | 425 | 294 | −132 | 162 | 320 | −80 | 241 | 79 | 138 |
| June | 434 | 329 | −84 | 245 | 356 | −36 | 321 | 76 | 134 |
| July | 491 | 345 | −202 | 143 | 377 | −111 | 266 | 122 | 137 |
| August | 630 | 424 | −184 | 239 | 474 | −65 | 410 | 170 | 148 |
| September | 893 | 591 | −425 | 166 | 650 | −266 | 384 | 218 | 148 |
| October | 350 | 186 | −174 | 12 | 222 | −87 | 135 | 123 | 163 |
| November | 589 | 211 | 299 | 509 | 239 | 367 | 606 | 97 | 146 |
| December | 1950 | 1036 | −388 | 648 | 1127 | −134 | 993 | 345 | 128 |
| February–December | 6809 | 4162 | −1632 | 2528 | 4564 | −628 | 3940 | 1409 | 1530 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Y.-A.; Zeng, W.; Khurram, A.; Kleissl, J. Cost-Optimal Aggregated Electric Vehicle Flexibility for Demand Response Market Participation by Workplace Electric Vehicle Charging Aggregators. Energies 2024, 17, 1745. https://doi.org/10.3390/en17071745
Chen Y-A, Zeng W, Khurram A, Kleissl J. Cost-Optimal Aggregated Electric Vehicle Flexibility for Demand Response Market Participation by Workplace Electric Vehicle Charging Aggregators. Energies. 2024; 17(7):1745. https://doi.org/10.3390/en17071745
Chicago/Turabian StyleChen, Yi-An, Wente Zeng, Adil Khurram, and Jan Kleissl. 2024. "Cost-Optimal Aggregated Electric Vehicle Flexibility for Demand Response Market Participation by Workplace Electric Vehicle Charging Aggregators" Energies 17, no. 7: 1745. https://doi.org/10.3390/en17071745