Nonlinear Static Bending and Forced Vibrations of Single-Layer MoS2 with Thermal Stress

Abstract
:1. Introduction
2. Materials and Methods
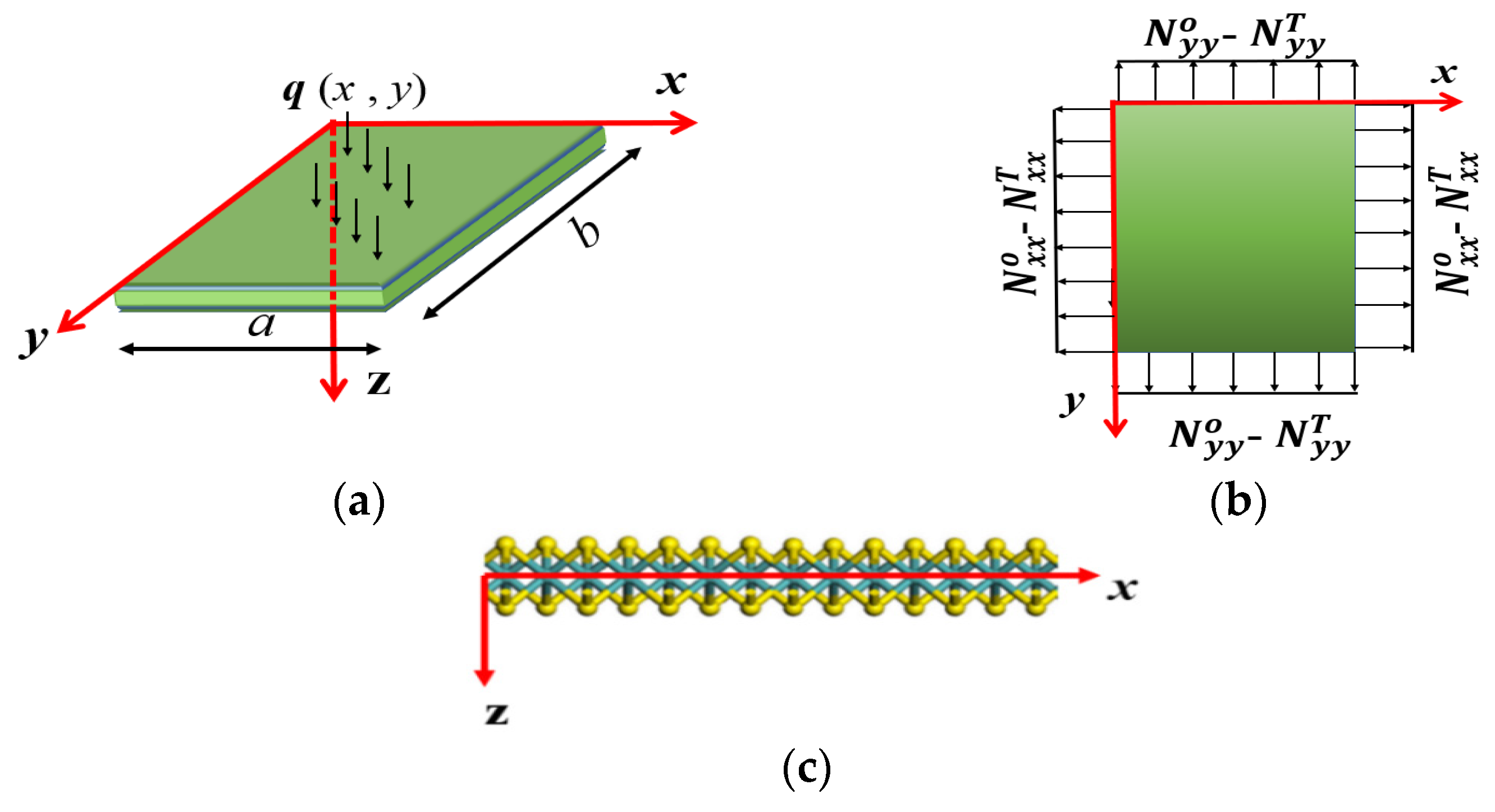
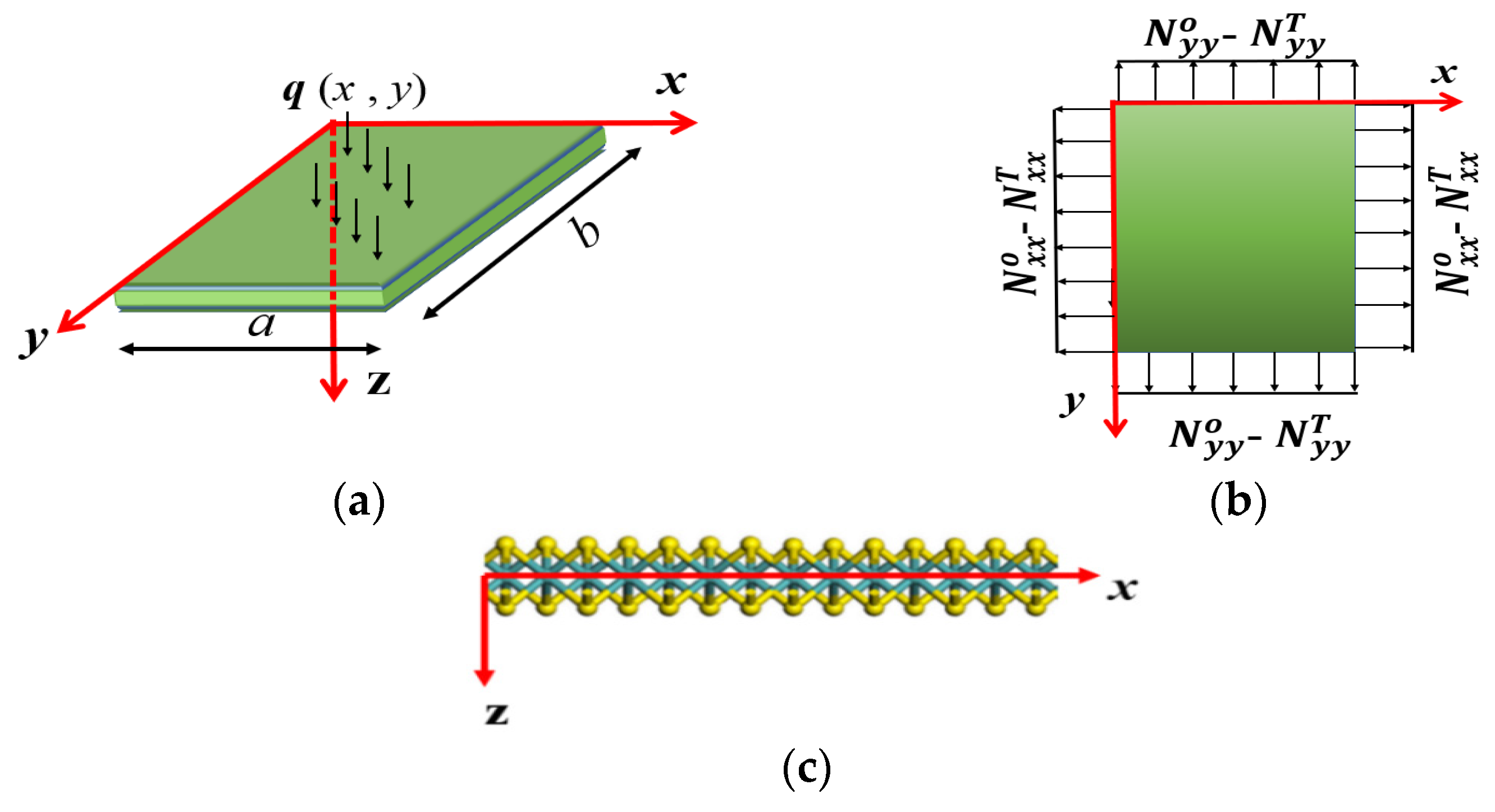
2.1. Analysis of Static Bending
2.2. Nonlinear Primary Resonance without Internal Resonance
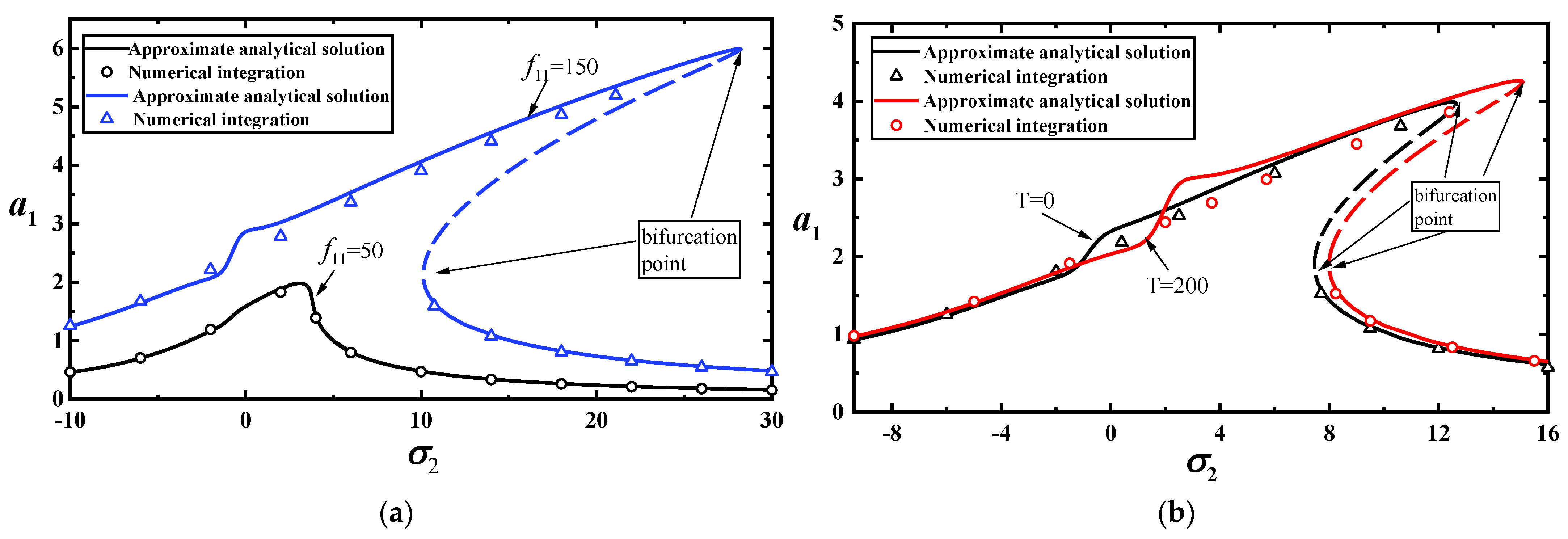
2.2.1. Primary Resonance of Low Frequency without Internal Resonance
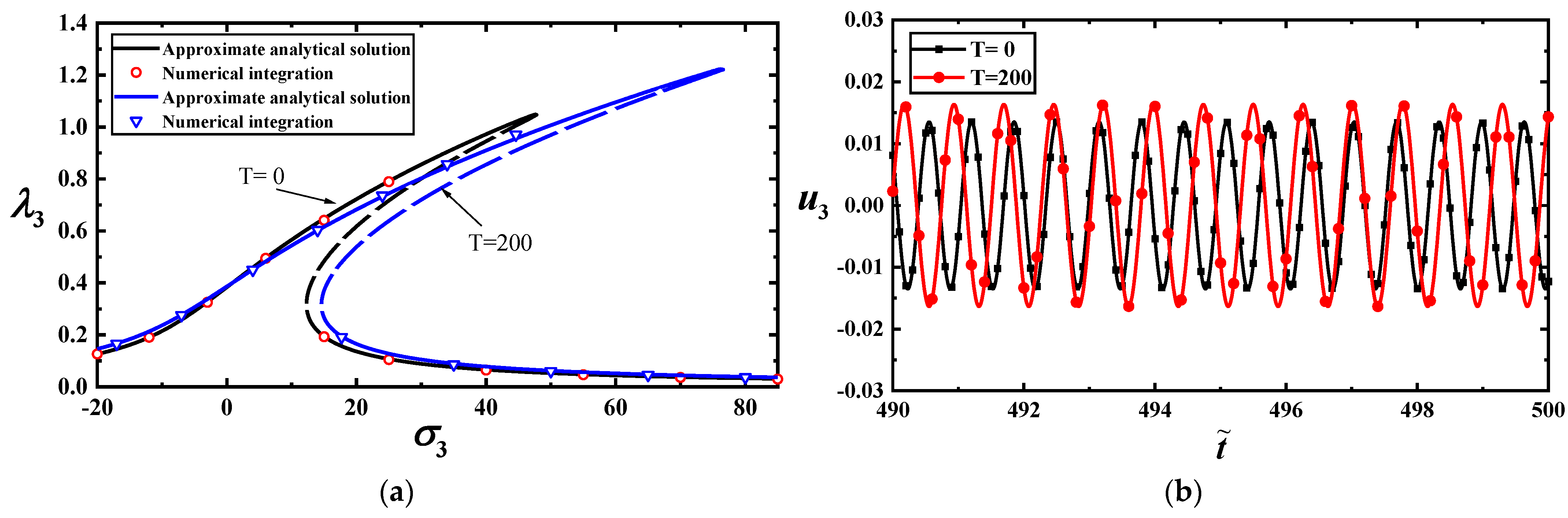
2.2.2. Primary Resonance of High Frequency without Internal Resonance
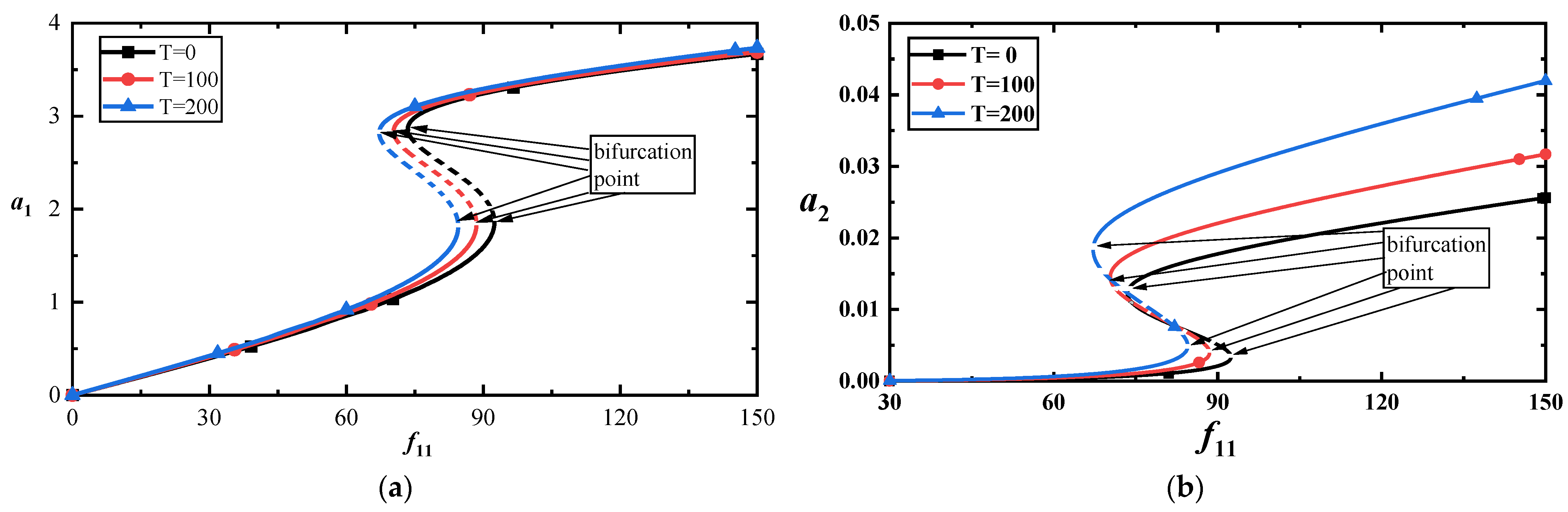
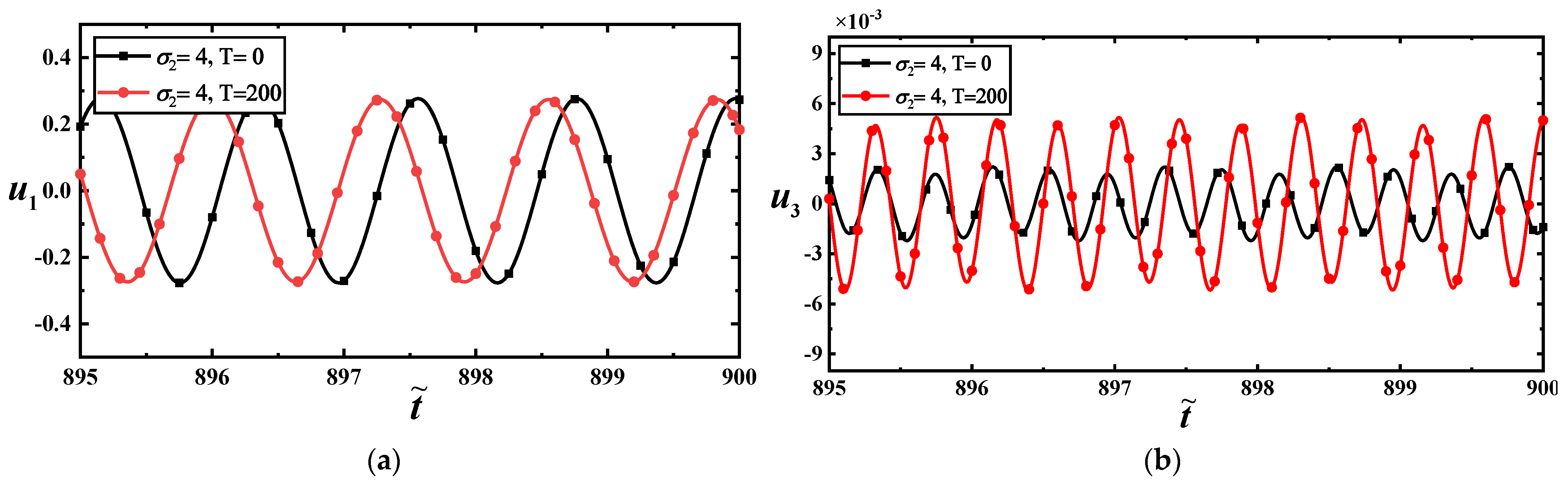
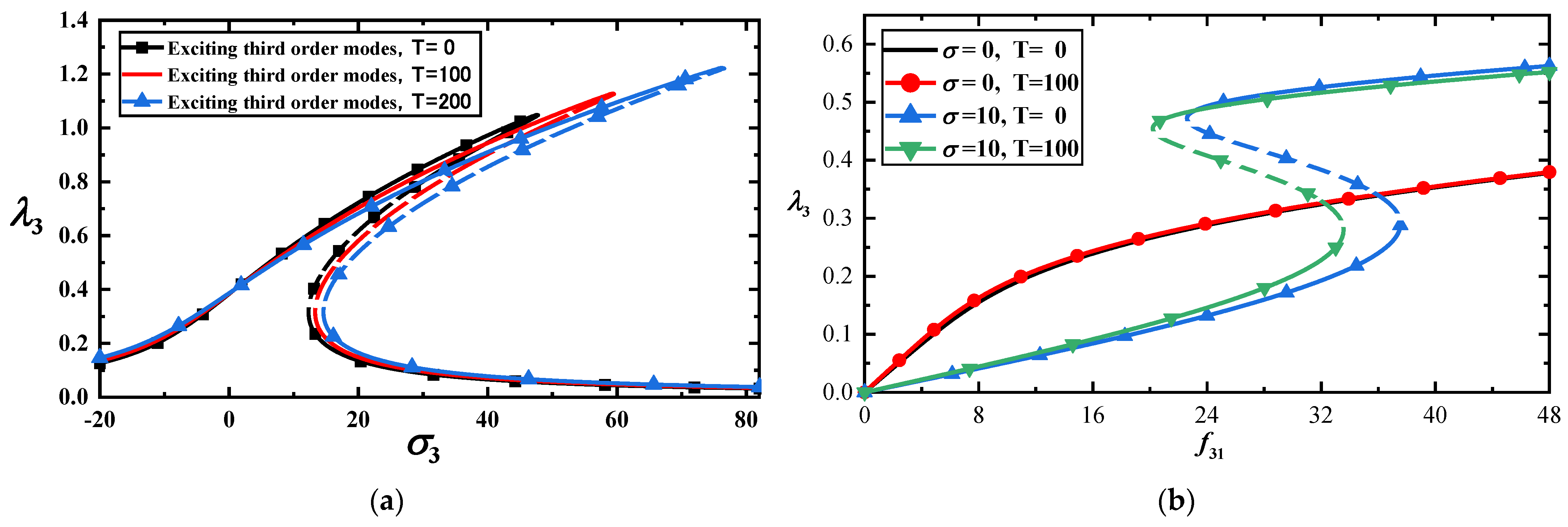
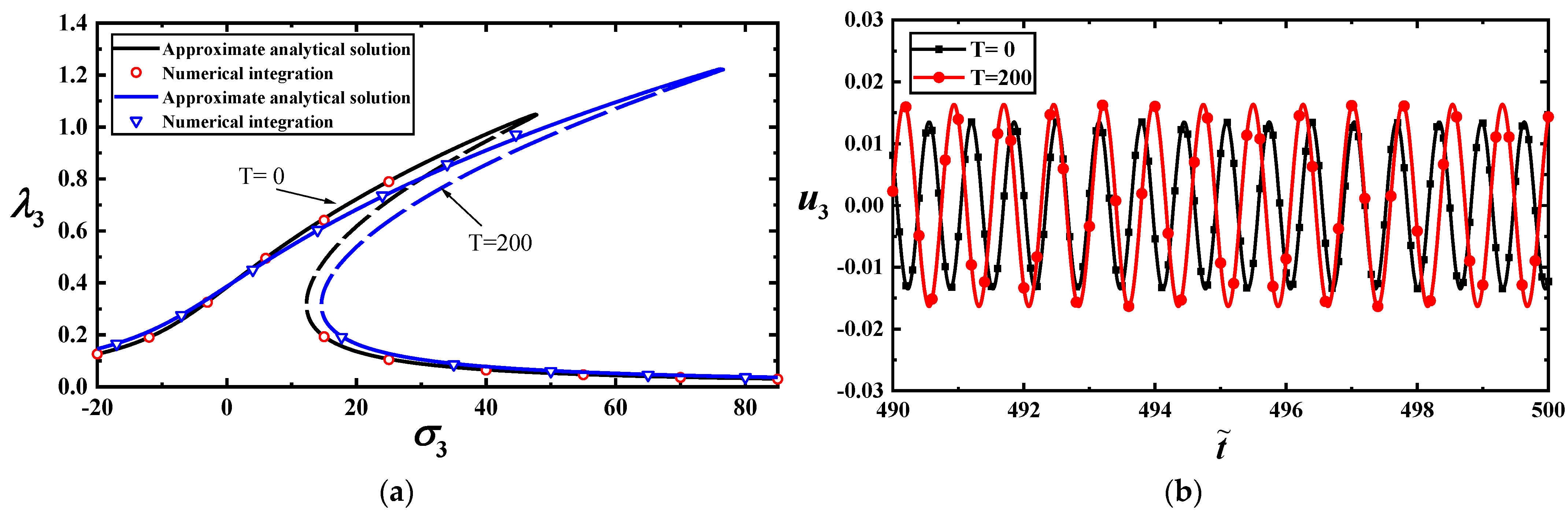
2.2.3. Primary Resonance and 1:3 Internal Resonance at Low Frequency
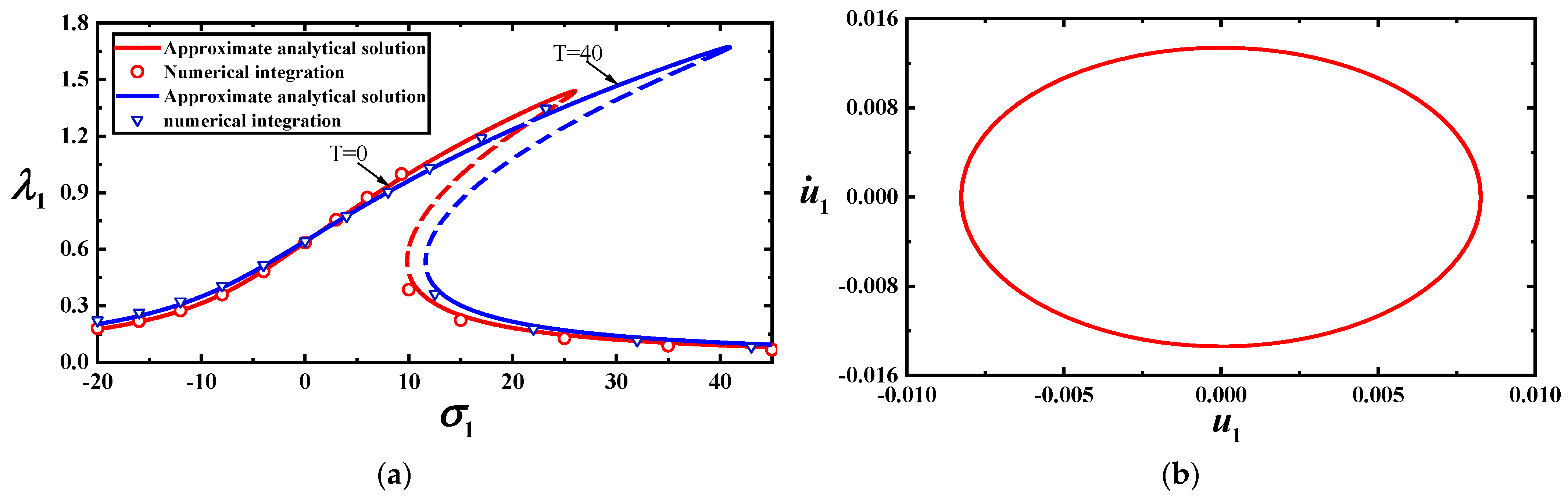
2.2.4. Stability Analysis of Steady-State Solutions
3. Conclusions
- (1)
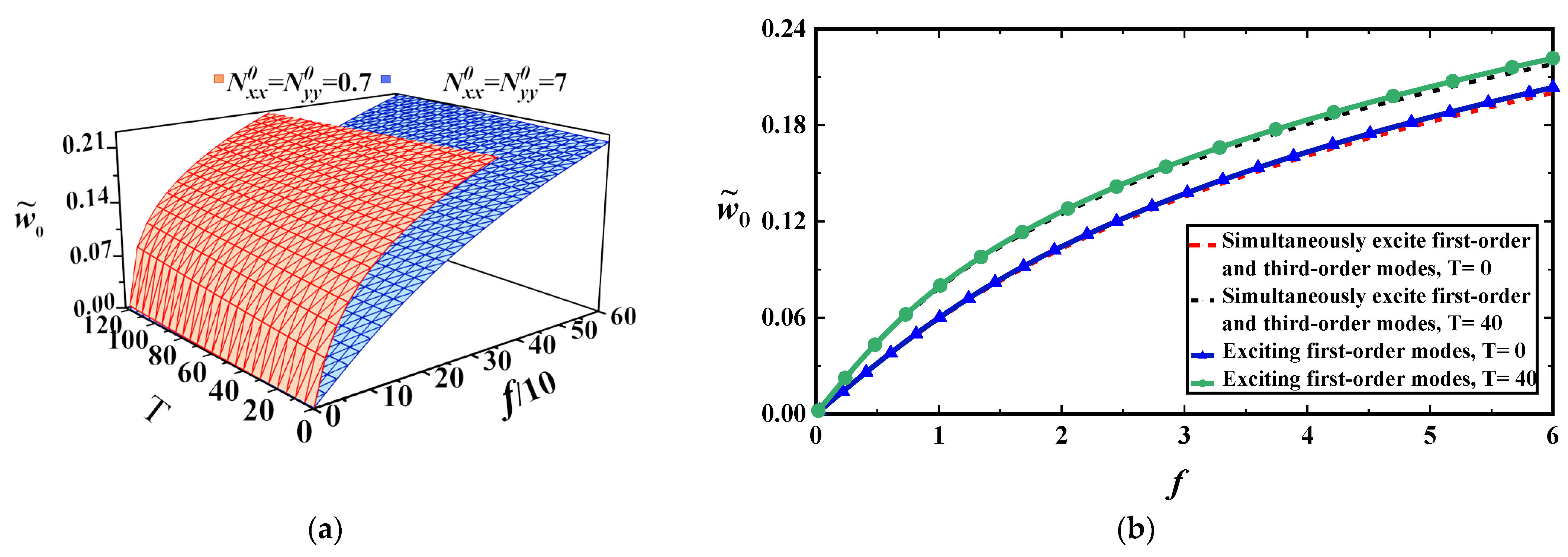
- The first-order mode can accurately represent the static deformation of MoS2 under symmetric loads.
- (2)
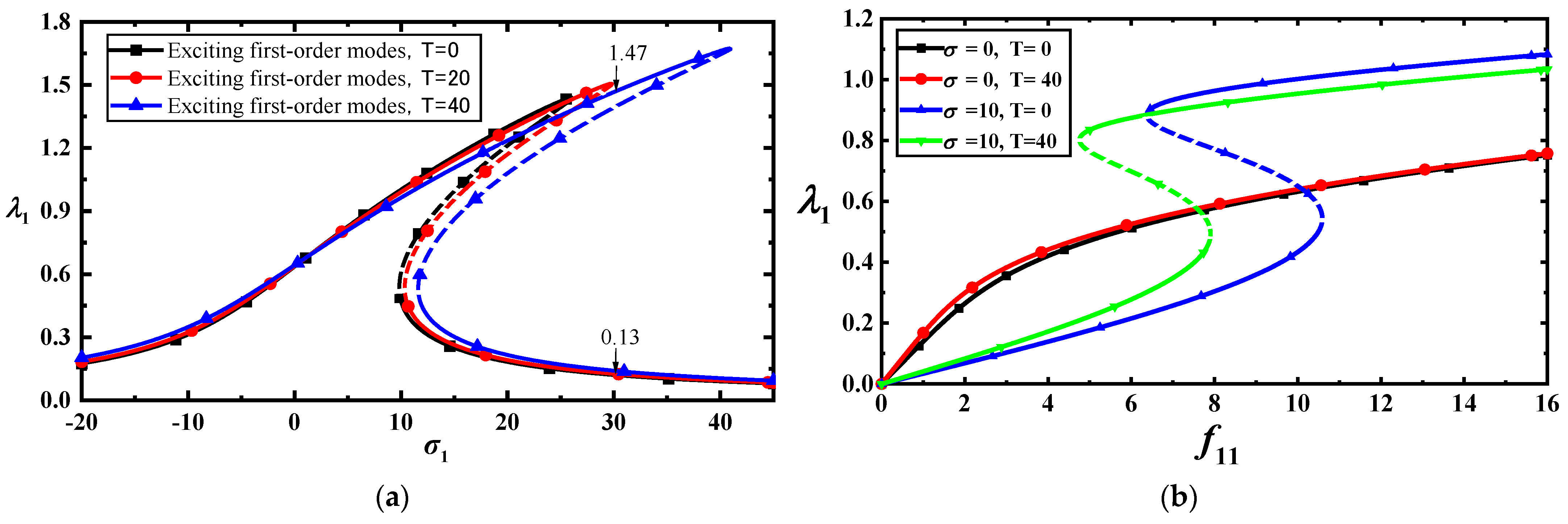
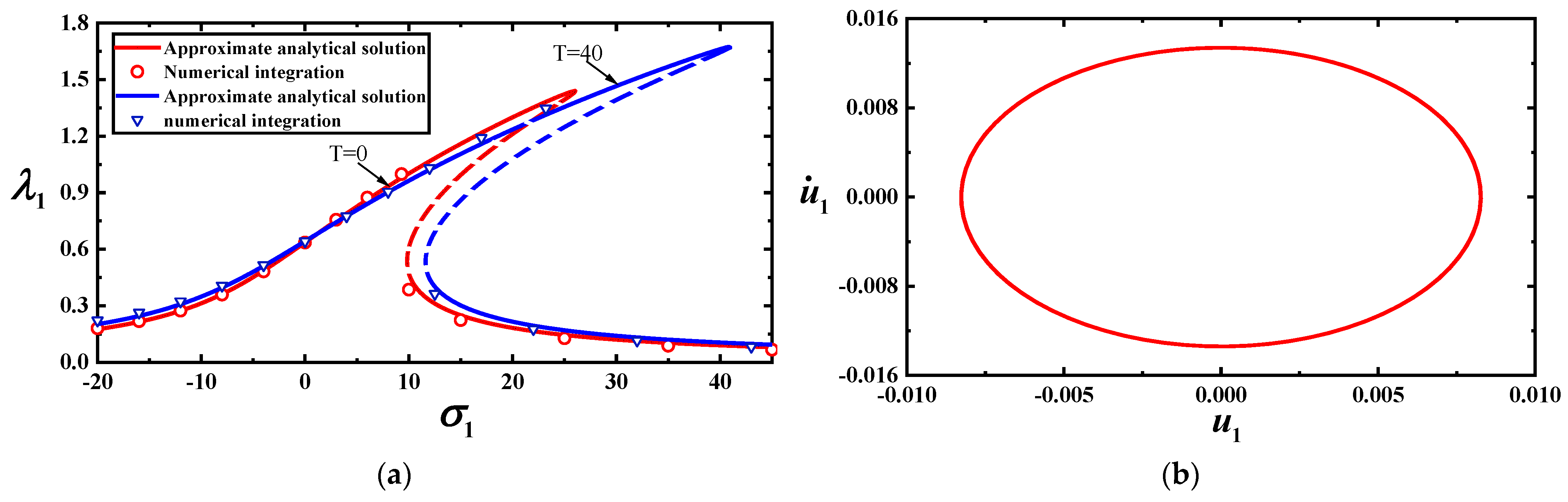
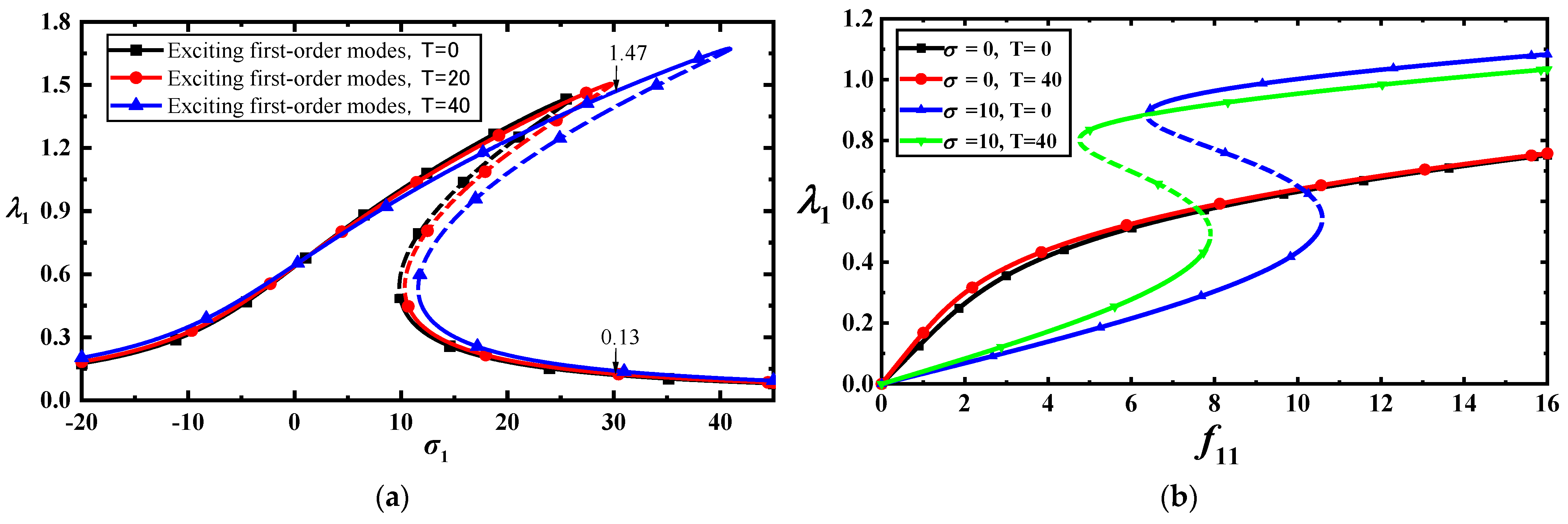
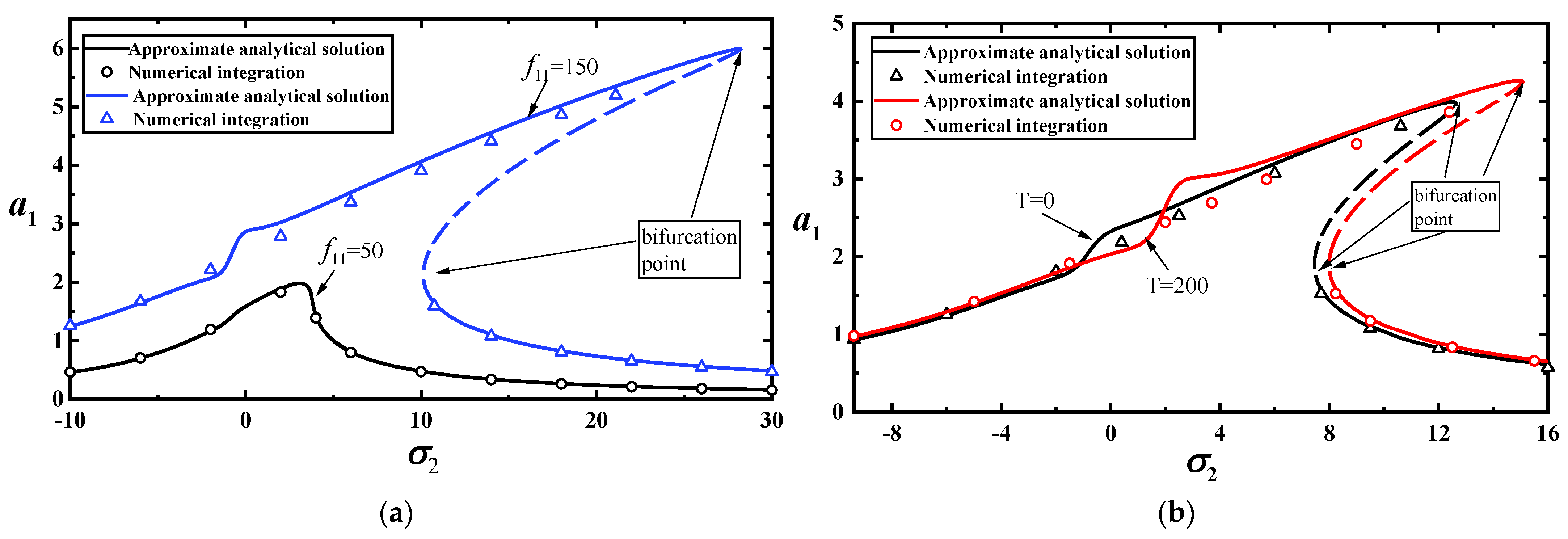
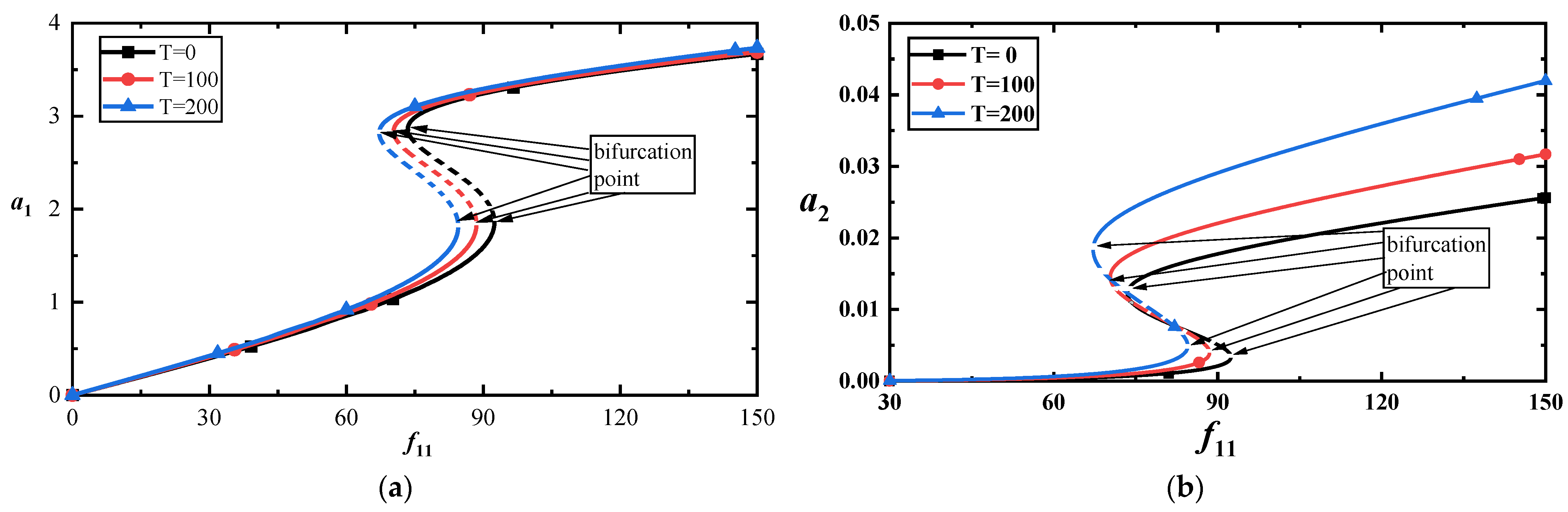
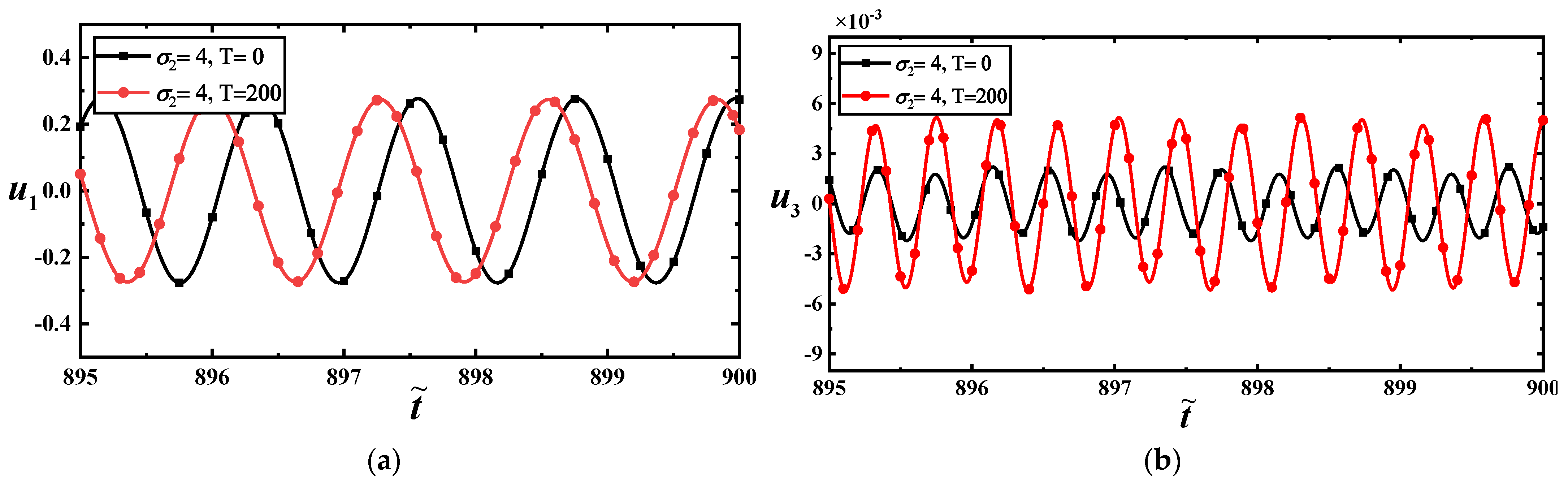
- Temperature has a slight effect on the single-mode vibrations of the MoS2. However, the combination of the load frequency and temperature have a more significant effect on the vibrations. When the temperature has a slight change, the bifurcation points of vibration amplitude will change significantly with the identical load’s amplitude and frequency.
- (3)
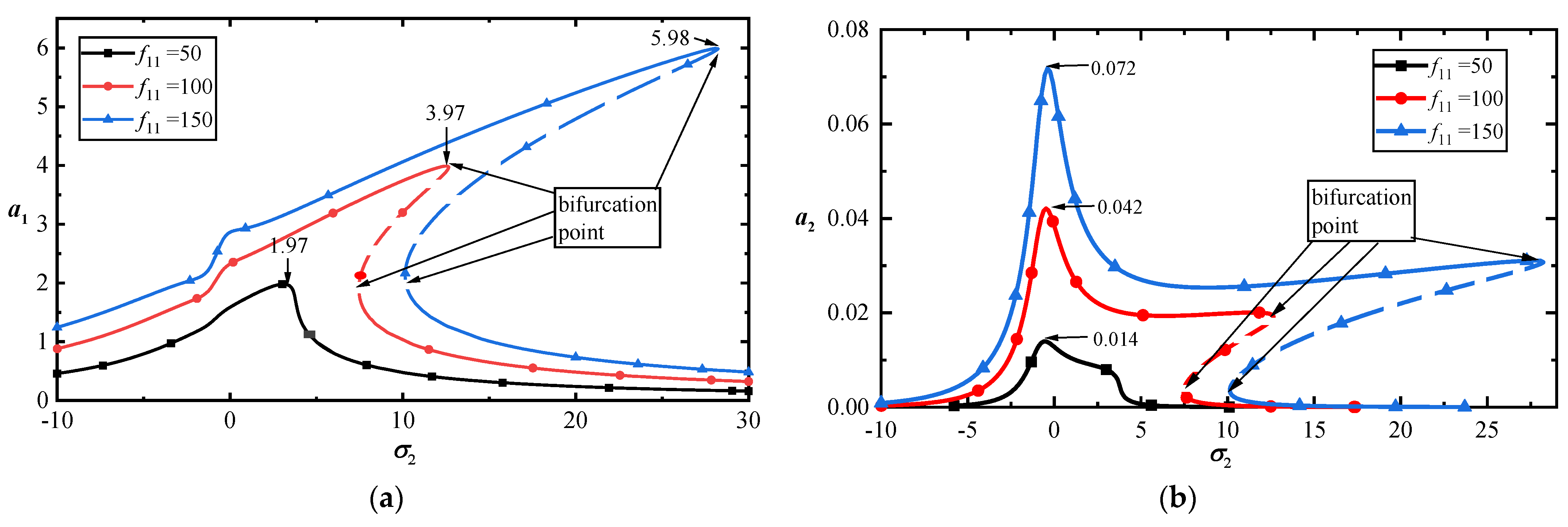
- The bifurcation points of the load at the low-frequency primary resonance are significantly smaller than those at the high frequency for single-mode vibrations.
- (4)
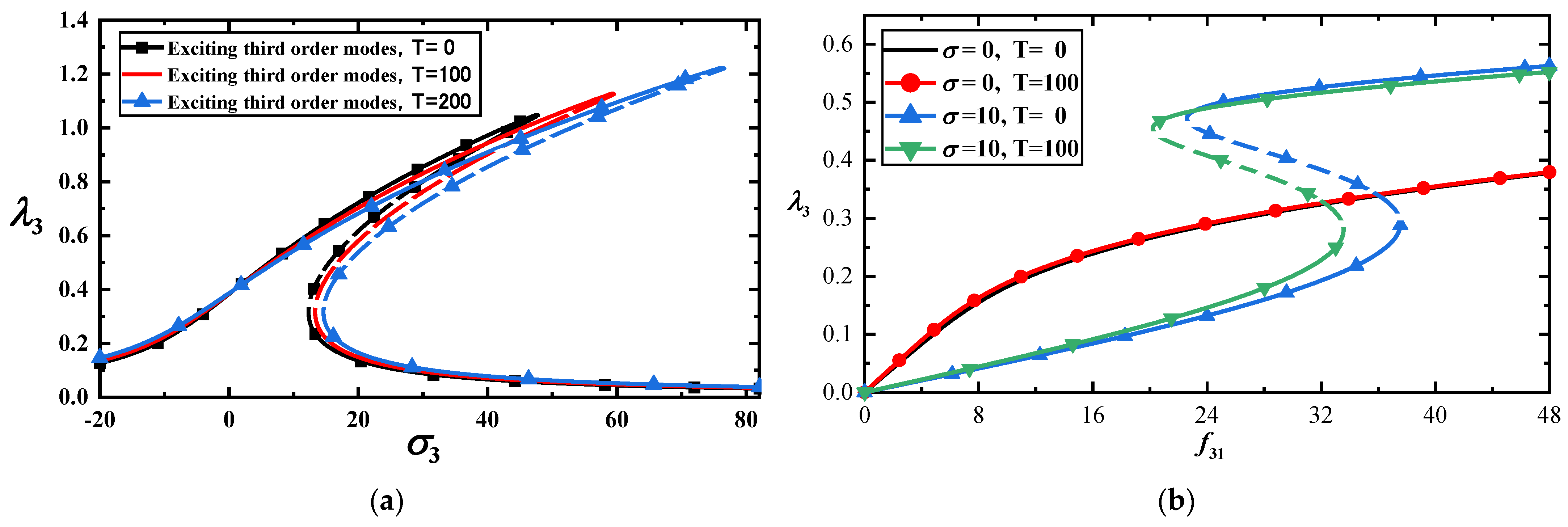
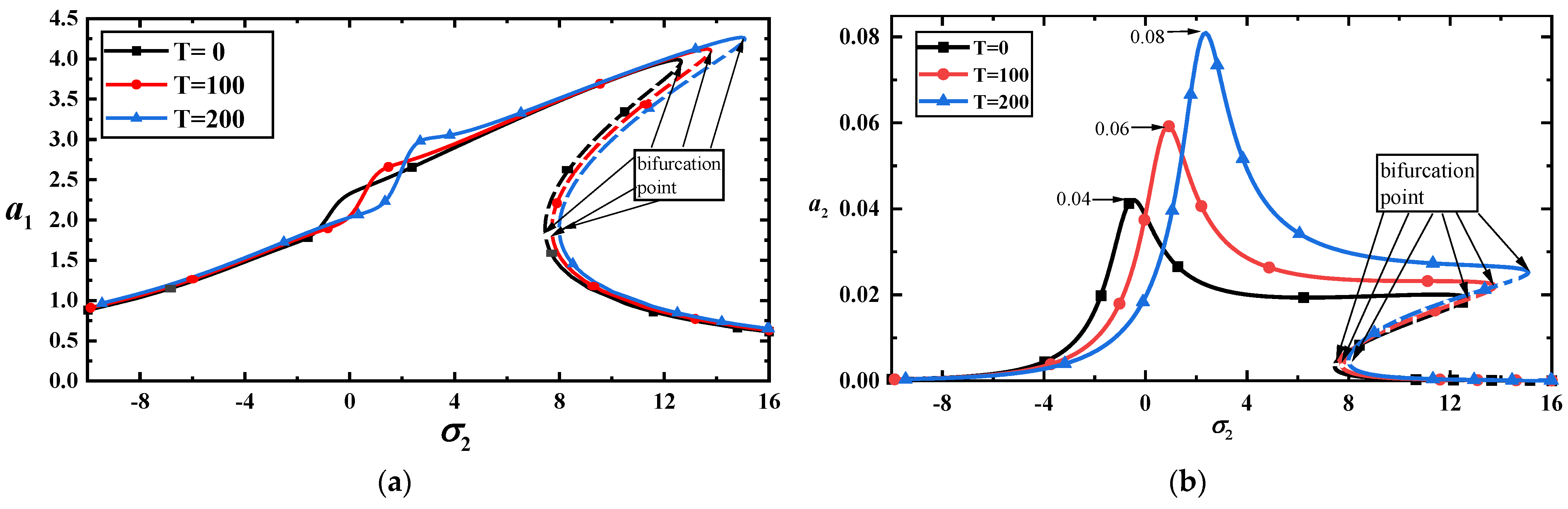
- The vibration amplitudes of the first-order mode are significantly larger than those of the higher-order modes under the same loads when a 1:3 internal resonance appear in the MoS2.
- (5)
- For the 1:3 internal resonance, the temperature has a more significant influence on the higher-order mode than on the lower-order mode, and a slight temperature difference may induce an unexpected jump in the vibration amplitude. Under the same load, the maximum value of the amplitude–frequency curve will increase significantly with the temperature’s increase.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
Appendix B
References
- Novoselov, K.S.; Geim, A.K.; Morozov, S.V.; Jiang, D.; Zhang, Y.; Dubonos, S.V.; Grigorieva, I.V.; Firsov, A.A. Electric field effect in atomically thin carbon films. Science 2004, 306, 666–669. [Google Scholar] [CrossRef]
- Xiong, Z.X.; Zhong, L.; Wang, H.T.; Li, X.Y. Structural Defects, Mechanical Behaviors, and Properties of Two-Dimensional Materials. Materials 2021, 14, 1192. [Google Scholar] [CrossRef]
- Cao, S.H.; Wang, Q.; Gao, X.F.; Zhang, S.J.; Hong, R.J.; Zhang, D.W. Monolayer-Graphene-Based Tunable Absorber in the Near-Infrared. Micromachines 2021, 12, 1320. [Google Scholar] [CrossRef]
- Savin, A.V.; Kosevich, Y.A. Modeling of One-Side Surface Modifications of Graphene. Materials 2019, 12, 4179. [Google Scholar] [CrossRef]
- Liang, T.; Liu, R.F.; Lei, C.; Wang, K.; Li, Z.Q.; Li, Y.W. Preparation and Test of NH3 Gas Sensor Based on Single-Layer Graphene Film. Micromachines 2020, 11, 965. [Google Scholar] [CrossRef]
- Mazur, O.; Awrejcewicz, J. Ritz Method in Vibration Analysis for Embedded Single-Layered Graphene Sheets Subjected to In-Plane Magnetic Field. Symmetry 2020, 12, 515. [Google Scholar] [CrossRef]
- Jiang, M.J.; Zhang, K.X.; LV, X.Y.; Wang, L.; Zhang, L.B.; Han, L.; Xing, H.Z. Monolayer Graphene Terahertz Detector Integrated with Artificial Microstructure. Sensors 2023, 23, 3203. [Google Scholar] [CrossRef]
- Peng, B.; Zheng, W.; Qin, J.; Zhang, W. Two-Dimensional MX2 Semiconductors for Sub-5 nm Junctionless Field Effect Transistors. Materials 2018, 11, 430. [Google Scholar] [CrossRef]
- Shendokar, S.; Aryeetey, F.; Hossen, M.F.; Ignatova, T.; Aravamudhan, S. Towards Low-Temperature CVD Synthesis and Characterization of Mono- or Few-Layer Molybdenum Disulfide. Micromachines 2023, 14, 1758. [Google Scholar] [CrossRef]
- Manish, C.; Suk, S.H.; Goki, E.; Li, L.J.; Ping, L.K.; Zhang, H. The chemistry of two-dimensional layered transition metal dichalcogenide nanosheets. Nat. Chem. 2013, 5, 263–275. [Google Scholar]
- Shi, H.; Yan, R.; Bertolazzi, S.; Bertolazzi, S.; Brivio, J.; Huang, L. Exciton Dynamics in Suspended Monolayer and Few-Layer MoS2 2D Crystals. ACS Nano 2013, 7, 1072–1080. [Google Scholar] [CrossRef]
- Chong, C.; Liu, H.X.; Wang, S.L.; Yang, K. First-Principles Study on the Effect of Strain on Single-Layer Molybdenum Disulfide. Nanomaterials 2021, 11, 3127. [Google Scholar] [CrossRef]
- Yang, R.; Fan, J.N.; Sun, M.T. Transition Metal Dichalcogenides (TMDCs) Heterostructures: Synthesis, Excitons and Photoelec-tric Properties. Chem. Rec. 2022, 22, 43202. [Google Scholar]
- Gacem, K.; Boukhicha, M.; Chen, Z.; Shukla, A. High quality 2D crystals made by anodic bonding: A general technique for layered materials. Nanotechnology 2012, 23, 505709. [Google Scholar] [CrossRef]
- Ganatra, R.; Zhang, Q. Few-layer MoS2: A promising layered semiconductor. ACS Nano 2014, 8, 4074–4099. [Google Scholar] [CrossRef]
- Lee, Y.H.; Zhang, X.Q.; Zhang, W.j.; Chang, M.T.; Lin, C.T.; Chang, K.D.; Yu, Y.C.; Wang, J.; Chang, C.; Li, L.; et al. Synthesis of large-area MoS2 atomic layers with chemical vapor deposition. Adv. Mater. 2012, 24, 2320–2325. [Google Scholar] [CrossRef]
- Mak, K.F.; He, K.; Shan, J.; Heinz, T.F. Control of valley polarization in monolayer MoS2 by optical helicity. Nat. Nanotechnol. 2012, 7, 494–498. [Google Scholar] [CrossRef]
- Muhammad, I.; Hina, M.; Abdul, S.; Umar, A.; Farah, A.; Arslan, U.; Irfan, S.; Pang, W.; Qin, S. Top-gate engineering of field-effect transistors based on single layers of MoS2 and graphene. J. Phys. Chem. Solids 2024, 184, 111710. [Google Scholar]
- Li, X.; Zhu, H.W. Two-dimensional MoS2: Properties, preparation, and applications. J. Mater. 2015, 1, 33–44. [Google Scholar] [CrossRef]
- Sajedeh, M.; Dumitru, D.; Guilherme, M.M.; Andras, K. Self-sensing, tunable monolayer MoS2 nanoelectromechanical resonators. Nat. Commun. 2019, 10, 4831. [Google Scholar]
- Zhang, Y.; Xu, F.; Zhang, X.Y. The influence of temperature on the large amplitude vibration of circular single-layered MoS2 resonator. Eur. Phys. J. Plus 2022, 137, 428. [Google Scholar] [CrossRef]
- Andres, C.G.; Ronald, L.V.; Michele, B.; Vander, Z.H.; Steele, G.A.; Venstra, W.J. Single-layer MoS2 mechanical resonators. Adv. Mater. 2013, 25, 6719–6723. [Google Scholar]
- Akinwande, D.; Brennan, J.C.; Bunch, S.J.; Egberts, P.; Felts, J.R. A review on mechanics and mechanical properties of 2D materials—Graphene and beyond. Extrem. Mech. Lett. 2017, 13, 1342–1377. [Google Scholar] [CrossRef]
- Sun, Y.W.; Papageorgiou, D.G.; Humphreys, C.J.; Dunstan, D.J.; Puech, P.; Proctor, J.E.; Bousige, C.; Machon, D.; San-Miguel, A. Mechanical properties of graphene. Appl. Phys. Rev. 2021, 8, 021310. [Google Scholar] [CrossRef]
- Huang, K.; Yin, Y.; Qu, B. Tight-binding theory of graphene mechanical properties. Microsyst. Technol. 2021, 27, 1–8. [Google Scholar] [CrossRef]
- Huang, K.; Wu, J.; Yin, Y. An Atomistic-Based Nonlinear Plate Theory for Hexagonal Boron Nitride. Nanomaterials 2021, 11, 3113. [Google Scholar] [CrossRef]
- Huang, K.; Wu, J.; Yin, Y.; Xu, W. Atomistic-Continuum theory of graphene fracture for opening mode crack. Int. J. Solids Struct. 2023, 268, 112172. [Google Scholar] [CrossRef]
- Xiong, S.; Cao, G.X. Bending response of single layer MoS2. Nanotechnology 2016, 27, 105701. [Google Scholar] [CrossRef]
- Huang, K.; Wang, T.; Yao, J. Nonlinear plate theory of single-layered MoS2 with thermal effect. Acta Phys. Sin. 2021, 70, 369–375. [Google Scholar] [CrossRef]
- Late, D.J.; Shirodkar, S.N.; Waghmare, U.V.; Dravid, V.P.; Rao, C.N.R. Thermal Expansion, Anharmonicity and Temperature-Dependent Raman Spectra of Single- and Few-Layer MoSe2 and WSe2. ChemPhysChem 2014, 15, 1592–1598. [Google Scholar] [CrossRef]
- Hu, X.; Yasaei, P.; Jokisaari, J.; Öğüt, S.; Salehi, K.A.; Klie, R.F. Mapping Thermal Expansion Coefficients in Freestanding 2D Materials at the Nanometer Scale. Phys. Rev. Lett. 2018, 120, 055902. [Google Scholar] [CrossRef]
- Zhang, R.S.; Cao, H.Y.; Jiang, J.W. Tunable thermal expansion coefficient of transition-metal dichalcogenide lateral hetero-structures. Nanotechnology 2020, 31, 405709. [Google Scholar] [CrossRef]
- Audoly, B.; Pomeau, Y. Elasticity and Geometry: From Hair Curls to the Nonlinear Response of Shells; Oxford University Press: New York, NY, USA, 2010. [Google Scholar]
- Eduard, E.; Krauthammer, T. Thin Plates and Shells: Theory, Analysis, and Applications; CRC Press: New York, NY, USA, 2001. [Google Scholar]
- Vujanovic, B. Conservation laws of dynamical systems via D’alembert’s principle. Int. J. Non-Linear Mech. 1978, 13, 185–197. [Google Scholar] [CrossRef]
- Hu, H. Variational Principles of Theory of Elasticity with Applications; Science Press: Beijing, China, 1981. [Google Scholar]
- Jiang, J.W.; Qi, Z.A.; Harold, S. Elastic bending modulus of single-layer molybdenum disulfide (MoS2): Finite thickness effect. Nanotechnology 2013, 24, 435705. [Google Scholar] [CrossRef]
- Xiong, S.; Cao, G.X. Molecular dynamics simulations of mechanical properties of monolayer MoS2. Nanotechnology 2015, 26, 185705. [Google Scholar] [CrossRef]
- Nayfeh, A.H.; Mook, D.T. Nonlinear Oscillations; John Wiley & Sons: New York, NY, USA, 1980. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 9.61 | 120 | 0.23 | 6.49 × 10−5 | 792 | 610 | 0.05 |
| 0.445 | 13.05 | 1.1544 | 9.1788 |
| 0.65 | 27.85 | 1.2062 | 9.2167 |
| First-Order Natural Frequency | Third-Order Natural Frequency | ||
|---|---|---|---|
| 0 | = 5.18 | = 15.50 | −4 |
| 100 | = 5.03 | = 15.09 | 0.914 |
| 200 | = 4.88 | = 14.68 | 4 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, X.; Huang, K.; Zhang, Y. Nonlinear Static Bending and Forced Vibrations of Single-Layer MoS2 with Thermal Stress. Materials 2024, 17, 1735. https://doi.org/10.3390/ma17081735
Chen X, Huang K, Zhang Y. Nonlinear Static Bending and Forced Vibrations of Single-Layer MoS2 with Thermal Stress. Materials. 2024; 17(8):1735. https://doi.org/10.3390/ma17081735
Chicago/Turabian StyleChen, Xiaolin, Kun Huang, and Yunbo Zhang. 2024. "Nonlinear Static Bending and Forced Vibrations of Single-Layer MoS2 with Thermal Stress" Materials 17, no. 8: 1735. https://doi.org/10.3390/ma17081735