
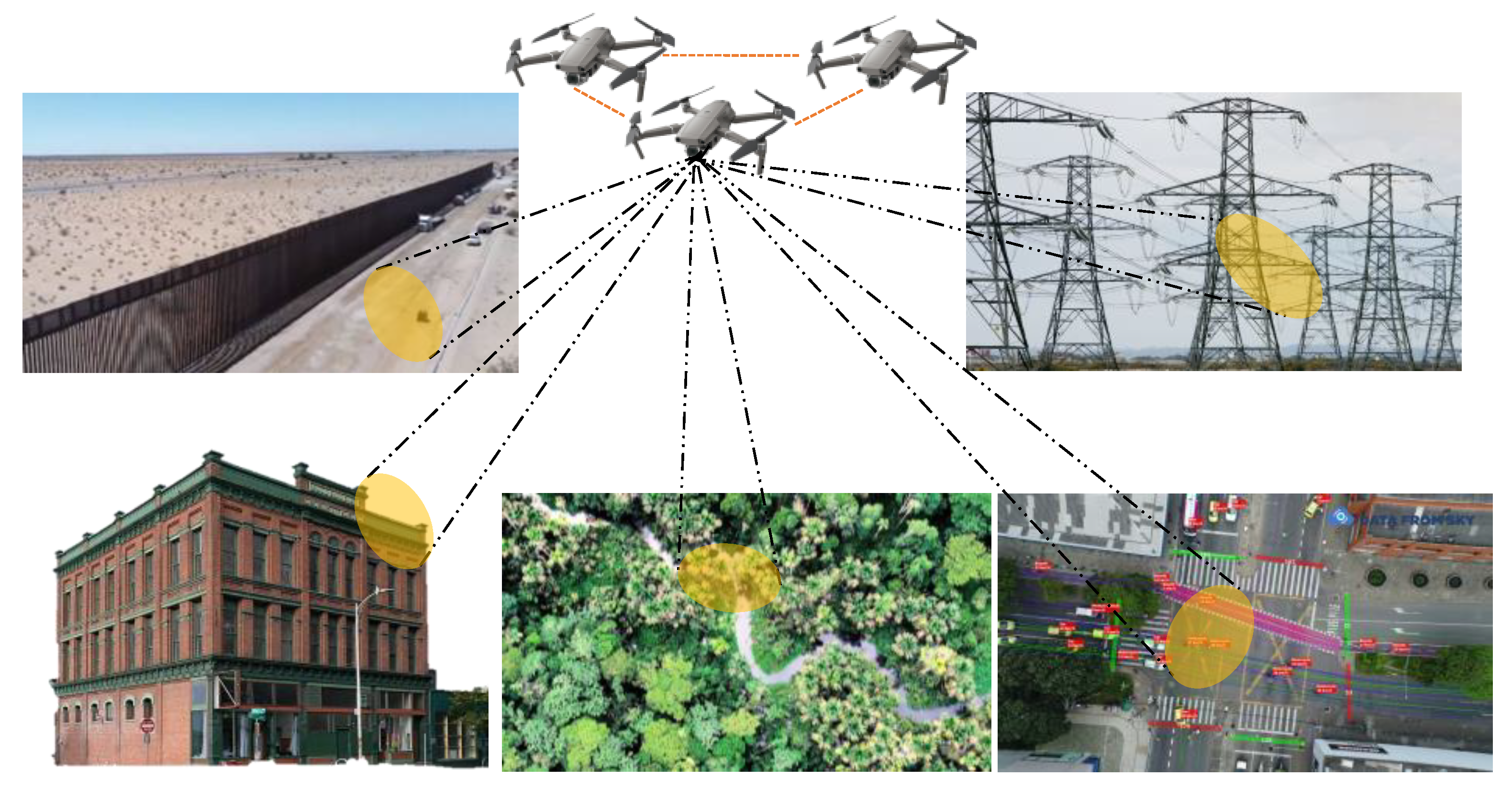
Networked Unmanned Aerial Vehicles for Surveillance and Monitoring: A Survey



Abstract
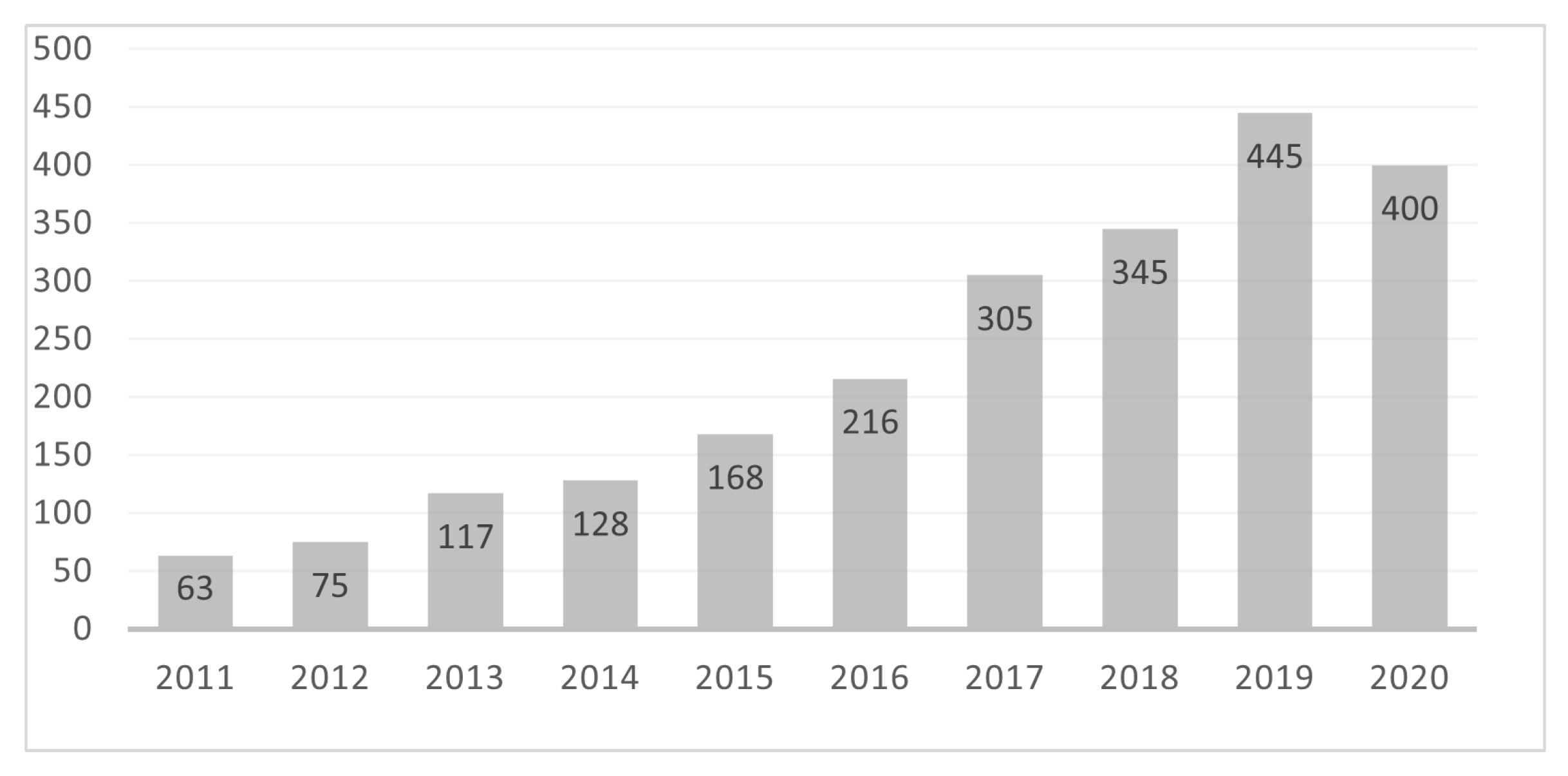
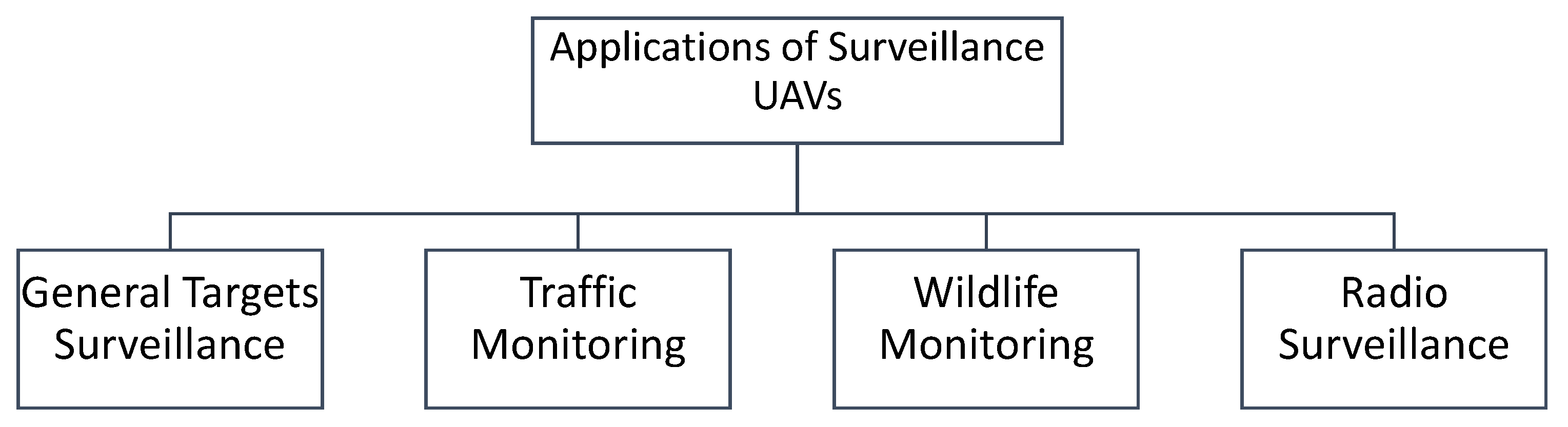
:1. Introduction
1.1. Motivation for This Review
1.2. Paper Organization
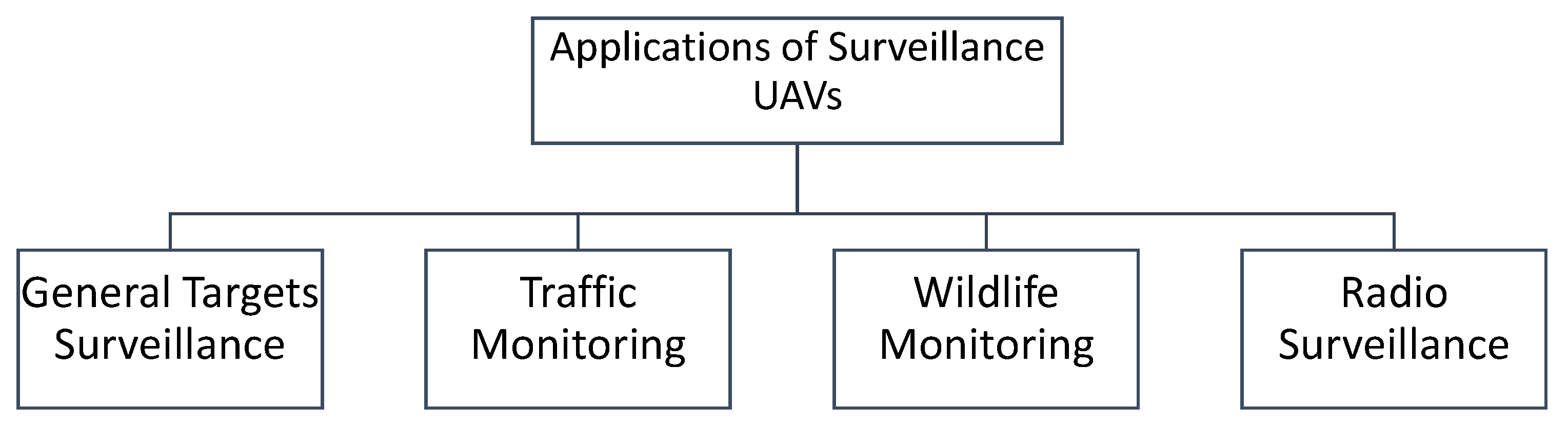
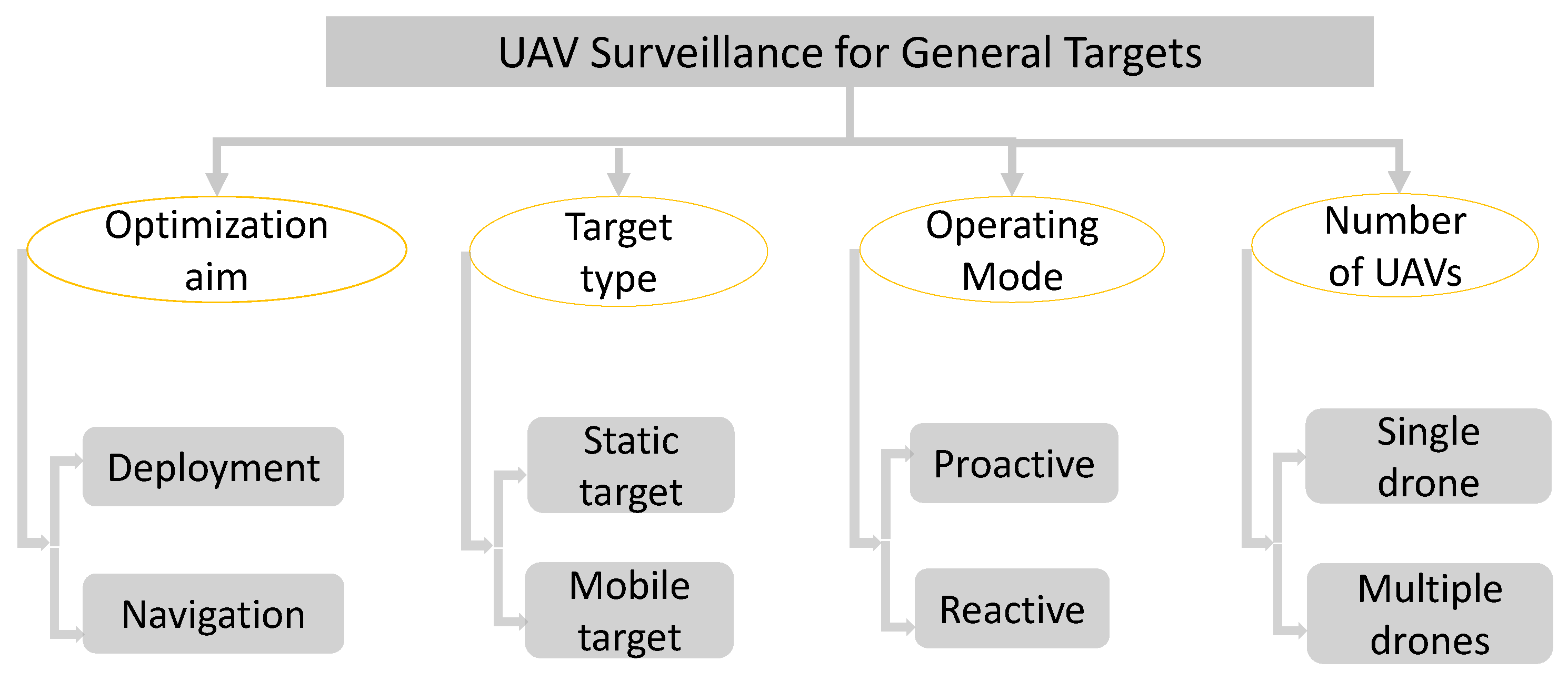
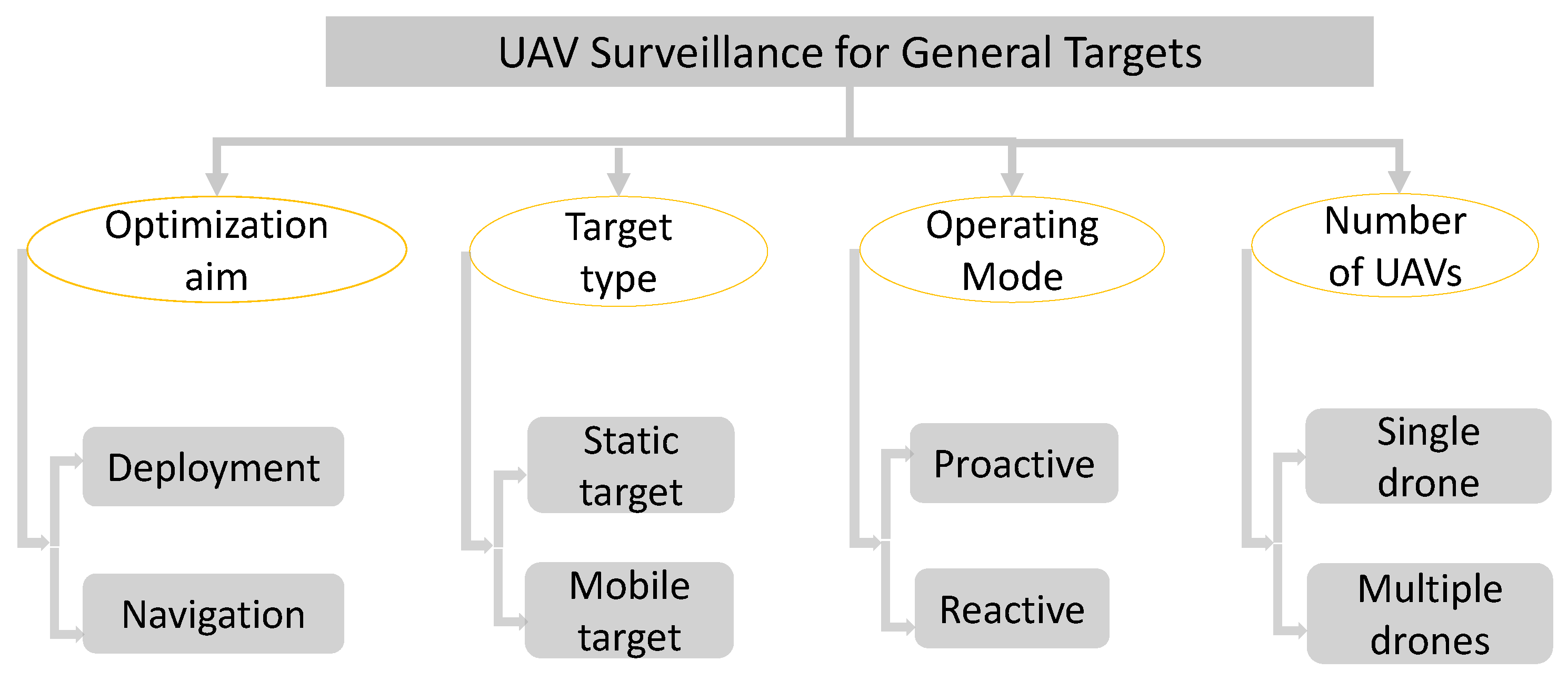
2. General Target Surveillance
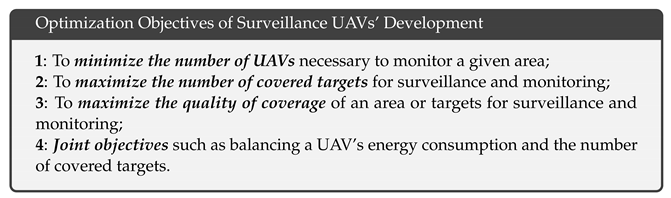
2.1. Optimization Objectives
2.2. Coordination of UAVs
2.3. Research Gap and Future Directions
3. Traffic Monitoring
3.1. UAV Video-Processing Techniques
3.2. Coordination of UAVs
3.3. Research Gap and Future Directions
4. Wildlife Monitoring UAVs
Research Gap and Future Directions
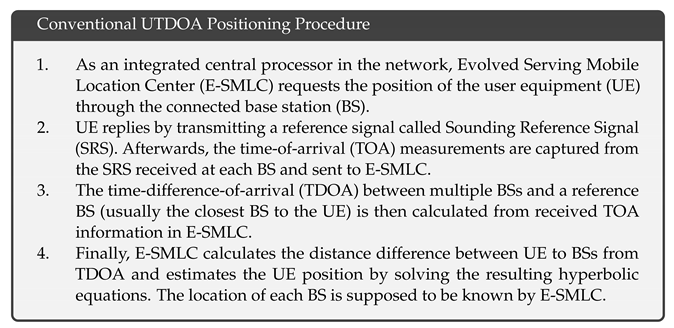
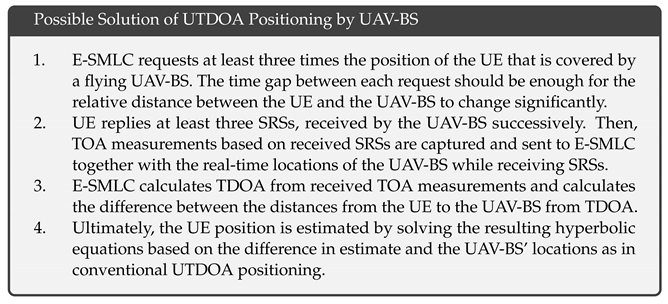
5. Radio Surveillance by UAV-BSs
Research Gap and Future Directions
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| UAV-BSs | Unmanned Aerial Vehicle Base Stations |
| MWA | Maximal Weighted Area |
| QoS | Quality-of-Service |
| SCA | Successive Convex Approximation |
| E-SMLC | Evolved Serving Mobile Location Center |
| UE | User Equipment |
| TOA | Time-of-Arrival |
| UTDOA | Uplink Time Difference of Arrival |
References
- Yue, X.; Liu, Y.; Wang, J.; Song, H.; Cao, H. Software Defined Radio and Wireless Acoustic Networking for Amateur Drone Surveillance. IEEE Commun. Mag. 2018, 56, 90–97. [Google Scholar] [CrossRef]
- Wang, J.; Liu, Y.; Niu, S.; Song, H.; Jing, W.; Yuan, J. Blockchain enabled verification for cellular-connected unmanned aircraft system networking. Future Gener. Comput. Syst. 2021, 123, 233–244. [Google Scholar] [CrossRef]
- Khan, M.; Heurtefeux, K.; Mohamed, A.; Harras, K.A.; Hassan, M.M. Mobile target coverage and tracking on drone-be-gone UAV cyber-physical testbed. IEEE Syst. J. 2017, 12, 3485–3496. [Google Scholar] [CrossRef]
- Matveev, A.S.; Teimoori, H.; Savkin, A.V. A method for guidance and control of an autonomous vehicle in problems of border patrolling and obstacle avoidance. Automatica 2011, 47, 515–524. [Google Scholar] [CrossRef]
- Zhou, Y.; Rao, B.; Wang, W. UAV Swarm Intelligence: Recent Advances and Future Trends. IEEE Access 2020, 8, 183856–183878. [Google Scholar] [CrossRef]
- Li, H.; Savkin, A.V. Wireless sensor network based navigation of micro flying robots in the industrial internet of things. IEEE Trans. Ind. Inform. 2018, 14, 3524–3533. [Google Scholar] [CrossRef]
- Zhang, X.; Ali, M. A Bean Optimization-Based Cooperation Method for Target Searching by Swarm UAVs in Unknown Environments. IEEE Access 2020, 8, 43850–43862. [Google Scholar] [CrossRef]
- Alcarria, R.; Bordel, B.; Manso, M.A.; Iturrioz, T.; Perez, M. Analyzing UAV-based remote sensing and WSN support for data fusion. In International Conference on Information Technology & Systems; Springer: Cham, Switzerland, 2018; pp. 756–766. [Google Scholar]
- Chen, W.; Liu, J.; Guo, H. Achieving Robust and Efficient Consensus for Large-Scale Drone Swarm. IEEE Trans. Veh. Technol. 2020. [Google Scholar] [CrossRef]
- Panday, U.S.; Pratihast, A.K.; Aryal, J.; Kayastha, R.B. A review on drone-based data solutions for cereal crops. Drones 2020, 4, 41. [Google Scholar] [CrossRef]
- Wu, D.; Li, R.; Zhang, F.; Liu, J. A review on drone-based harmful algae blooms monitoring. Environ. Monit. Assess. 2019, 191, 1–11. [Google Scholar] [CrossRef] [PubMed]
- Mishra, B.; Garg, D.; Narang, P.; Mishra, V. Drone-surveillance for search and rescue in natural disaster. Comput. Commun. 2020, 156, 1–10. [Google Scholar] [CrossRef]
- Flammini, F.; Naddei, R.; Pragliola, C.; Smarra, G. Towards automated drone surveillance in railways: State-of-the-art and future directions. In International Conference on Advanced Concepts for Intelligent Vision Systems; Springer: Cham, Switzerland, 2016; pp. 336–348. [Google Scholar]
- Shakhatreh, H.; Sawalmeh, A.H.; Al-Fuqaha, A.; Dou, Z.; Almaita, E.; Khalil, I.; Othman, N.S.; Khreishah, A.; Guizani, M. Unmanned Aerial Vehicles (UAVs): A Survey on Civil Applications and Key Research Challenges. IEEE Access 2019, 7, 48572–48634. [Google Scholar] [CrossRef]
- Mohamed, N.; Al-Jaroodi, J.; Jawhar, I.; Idries, A.; Mohammed, F. Unmanned aerial vehicles applications in future smart cities. Technol. Forecast. Soc. Chang. 2020, 153, 119293. [Google Scholar] [CrossRef]
- Savkin, A.V.; Huang, H. Proactive deployment of aerial drones for coverage over very uneven terrains: A version of the 3D art gallery problem. Sensors 2019, 19, 1438. [Google Scholar] [CrossRef] [Green Version]
- Savkin, A.V.; Huang, H. Asymptotically optimal deployment of drones for surveillance and monitoring. Sensors 2019, 19, 2068. [Google Scholar] [CrossRef] [Green Version]
- Zorbas, D.; Douligeris, C. Computing optimal drone positions to wirelessly recharge IoT devices. In Proceedings of the IEEE INFOCOM 2018-IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), Honolulu, HI, USA, 15–19 April 2018; pp. 628–633. [Google Scholar]
- Alzenad, M.; El-Keyi, A.; Lagum, F.; Yanikomeroglu, H. 3-D placement of an unmanned aerial vehicle base station (UAV-BS) for energy-efficient maximal coverage. IEEE Wirel. Commun. Lett. 2017, 6, 434–437. [Google Scholar] [CrossRef] [Green Version]
- Bor-Yaliniz, R.I.; El-Keyi, A.; Yanikomeroglu, H. Efficient 3-D placement of an aerial base station in next generation cellular networks. In Proceedings of the 2016 IEEE International Conference on Communications (ICC), Kuala Lumpur, Malaysia, 22–27 May 2016; pp. 1–5. [Google Scholar]
- Galkin, B.; Kibilda, J.; DaSilva, L.A. Deployment of UAV-mounted access points according to spatial user locations in two-tier cellular networks. In Proceedings of the 2016 Wireless Days (WD), Toulouse, France, 23–25 March 2016; pp. 1–6. [Google Scholar]
- Huang, H.; Savkin, A.V. An Algorithm of Reactive Collision Free 3-D Deployment of Networked Unmanned Aerial Vehicles for Surveillance and Monitoring. IEEE Trans. Ind. Inform. 2019, 16, 132–140. [Google Scholar] [CrossRef]
- Savkin, A.V.; Huang, H. A Method for Optimized Deployment of a Network of Surveillance Aerial Drones. IEEE Syst. J. 2019, 13, 4474–4477. [Google Scholar] [CrossRef]
- Huang, H.; Savkin, A. Navigating UAVs for Optimal Monitoring of Groups of Moving Pedestrians or Vehicles. IEEE Trans. Veh. Technol. 2021, 70, 3891–3896. [Google Scholar] [CrossRef]
- Huang, H.; Savkin, A.V. Reactive 3D Deployment of A Flying Robotic Network for Surveillance of Mobile Targets. Comput. Netw. 2019, 161, 172–182. [Google Scholar] [CrossRef]
- Trotta, A.; Di Felice, M.; Montori, F.; Chowdhury, K.R.; Bononi, L. Joint coverage, connectivity, and charging strategies for distributed UAV networks. IEEE Trans. Robot. 2018, 34, 883–900. [Google Scholar] [CrossRef]
- Wang, L.; Hu, B.; Chen, S. Energy efficient placement of a drone base station for minimum required transmit power. IEEE Wirel. Commun. Lett. 2018, 9, 2010–2014. [Google Scholar] [CrossRef]
- Zhan, C.; Zeng, Y.; Zhang, R. Energy-efficient data collection in UAV enabled wireless sensor network. IEEE Wirel. Commun. Lett. 2017, 7, 328–331. [Google Scholar] [CrossRef] [Green Version]
- Huang, C.; Lv, C.; Hang, P.; Xing, Y. Towards Safe and Personalized Autonomous Driving: Decision-Making and Motion Control with DPF and CDT Techniques. IEEE/ASME Trans. Mechatron. 2021, 26, 611–620. [Google Scholar] [CrossRef]
- Huang, C.; Naghdy, F.; Du, H. Fault tolerant sliding mode predictive control for uncertain steer-by-wire system. IEEE Trans. Cybern. 2017, 49, 261–272. [Google Scholar] [CrossRef]
- Huang, H.; Savkin, A.V.; Li, X. Reactive Autonomous Navigation of UAVs for Dynamic Sensing Coverage of Mobile Ground Targets. Sensors 2020, 20, 3720. [Google Scholar] [CrossRef]
- Huang, H.; Savkin, A.V. Viable path planning for data collection robots in a sensing field with obstacles. Comput. Commun. 2017, 111, 84–96. [Google Scholar] [CrossRef]
- Huang, C.; Naghdy, F.; Du, H. Sliding mode predictive tracking control for uncertain steer-by-wire system. Control Eng. Pract. 2019, 85, 194–205. [Google Scholar] [CrossRef]
- Huang, H.; Savkin, A.V. Energy-Efficient Autonomous Navigation of Solar-Powered UAVs for Surveillance of Mobile Ground Targets in Urban Environments. Energies 2020, 13, 5563. [Google Scholar] [CrossRef]
- Savkin, A.V.; Huang, H. Navigation of a network of aerial drones for monitoring a frontier of a moving environmental disaster area. IEEE Syst. J. 2020, 14, 4746–4749. [Google Scholar] [CrossRef]
- Wall, T.; Monahan, T. Surveillance and violence from afar: The politics of drones and liminal security-scapes. Theor. Criminol. 2011, 15, 239–254. [Google Scholar] [CrossRef]
- Gendron, A. The Ethics of Overhead Surveillance: Deploying UAVs in the National Airspace for Law Enforcement and Other Purposes. Int. J. Intell. Ethics 2011, 2, 19–44. [Google Scholar]
- Huang, H.; Savkin, A.V.; Ni, W. Online UAV Trajectory Planning for Covert Video Surveillance of Mobile Targets. IEEE Trans. Autom. Sci. Eng. 2021. [Google Scholar] [CrossRef]
- Savkin, A.V.; Huang, H. Bioinspired Bearing Only Motion Camouflage UAV Guidance for Covert Video Surveillance of a Moving Target. IEEE Syst. J. 2020, 1–4. [Google Scholar] [CrossRef]
- Tang, J.; Liu, F.; Zou, Y.; Zhang, W.; Wang, Y. An improved fuzzy neural network for traffic speed prediction considering periodic characteristic. IEEE Trans. Intell. Transp. Syst. 2017, 18, 2340–2350. [Google Scholar] [CrossRef]
- Zhou, H.; Kong, H.; Wei, L.; Creighton, D.; Nahavandi, S. Efficient road detection and tracking for unmanned aerial vehicle. IEEE Trans. Intell. Transp. Syst. 2014, 16, 297–309. [Google Scholar] [CrossRef]
- Lin, Y.; Saripalli, S. Road detection from aerial imagery. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, Guangzhou, China, 11–14 December 2012; pp. 3588–3593. [Google Scholar]
- Cheng, H.Y.; Weng, C.C.; Chen, Y.Y. Vehicle detection in aerial surveillance using dynamic Bayesian networks. IEEE Trans. Image Process. 2011, 21, 2152–2159. [Google Scholar] [CrossRef] [PubMed]
- Cao, X.; Wu, C.; Lan, J.; Yan, P.; Li, X. Vehicle detection and motion analysis in low-altitude airborne video under urban environment. IEEE Trans. Circuits Syst. Video Technol. 2011, 21, 1522–1533. [Google Scholar] [CrossRef]
- Khan, M.A.; Ectors, W.; Bellemans, T.; Ruichek, Y.; Janssens, D.; Wets, G. Unmanned aerial vehicle-based traffic analysis: A case study to analyze traffic streams at urban roundabouts. Procedia Comput. Sci. 2018, 130, 636–643. [Google Scholar] [CrossRef]
- Wang, L.; Chen, F.; Yin, H. Detecting and tracking vehicles in traffic by unmanned aerial vehicles. Autom. Constr. 2016, 72, 294–308. [Google Scholar] [CrossRef]
- Zhao, X.; Dawson, D.; Sarasua, W.A.; Birchfield, S.T. Automated traffic surveillance system with aerial camera arrays imagery: Macroscopic data collection with vehicle tracking. J. Comput. Civ. Eng. 2017, 31, 04016072. [Google Scholar] [CrossRef]
- Yamazaki, F.; Liu, W.; Vu, T.T. Vehicle extraction and speed detection from digital aerial images. In Proceedings of the IGARSS 2008-2008 IEEE International Geoscience and Remote Sensing Symposium, Boston, MA, USA, 8–11 July 2008; Volume 3, p. III-1334. [Google Scholar]
- Angel, A.; Hickman, M.; Mirchandani, P.; Chandnani, D. Methods of analyzing traffic imagery collected from aerial platforms. IEEE Trans. Intell. Transp. Syst. 2003, 4, 99–107. [Google Scholar] [CrossRef]
- Shastry, A.C.; Schowengerdt, R.A. Airborne video registration and traffic-flow parameter estimation. IEEE Trans. Intell. Transp. Syst. 2005, 6, 391–405. [Google Scholar] [CrossRef]
- Cao, X.; Gao, C.; Lan, J.; Yuan, Y.; Yan, P. Ego motion guided particle filter for vehicle tracking in airborne videos. Neurocomputing 2014, 124, 168–177. [Google Scholar] [CrossRef]
- Ke, R.; Li, Z.; Kim, S.; Ash, J.; Cui, Z.; Wang, Y. Real-time bidirectional traffic flow parameter estimation from aerial videos. IEEE Trans. Intell. Transp. Syst. 2016, 18, 890–901. [Google Scholar] [CrossRef]
- Ramachandra, B.; Jones, M.; Vatsavai, R.R. A Survey of Single-Scene Video Anomaly Detection. IEEE Trans. Pattern Anal. Mach. Intell. 2020. [Google Scholar] [CrossRef] [PubMed]
- Yazdi, M.; Bouwmans, T. New trends on moving object detection in video images captured by a moving camera: A survey. Comput. Sci. Rev. 2018, 28, 157–177. [Google Scholar] [CrossRef]
- Liu, X.; Peng, Z.R.; Zhang, L.Y. Real-time UAV rerouting for traffic monitoring with decomposition based multi-objective optimization. J. Intell. Robot. Syst. 2019, 94, 491–501. [Google Scholar] [CrossRef]
- Cheng, L.; Zhong, L.; Tian, S.; Xing, J. Task assignment algorithm for road patrol by multiple UAVs with multiple bases and rechargeable endurance. IEEE Access 2019, 7, 144381–144397. [Google Scholar] [CrossRef]
- Guerriero, F.; Surace, R.; Loscri, V.; Natalizio, E. A multi-objective approach for unmanned aerial vehicle routing problem with soft time windows constraints. Appl. Math. Model. 2014, 38, 839–852. [Google Scholar] [CrossRef]
- Huang, H.; Savkin, A.V.; Huang, C. Decentralised Autonomous Navigation of a UAV Network for Road Traffic Monitoring. IEEE Trans. Aerosp. Electron. Syst. 2021. [Google Scholar] [CrossRef]
- Savkin, A.V.; Huang, H. Navigation of a UAV Network for Optimal Surveillance of a Group of Ground Targets Moving along a Road. IEEE Trans. Intell. Transp. Syst. 2021. [Google Scholar] [CrossRef]
- Huang, J.; Chen, Y.; Huang, Y.; Lin, P.; Chen, Y.; Lin, Y.; Yen, S.; Huang, P.; Chen, L. Rapid Prototyping for Wildlife and Ecological Monitoring. IEEE Syst. J. 2010, 4, 198–209. [Google Scholar] [CrossRef]
- Schofield, G.; Katselidis, K.A.; Lilley, M.K.; Reina, R.D.; Hays, G.C. Detecting elusive aspects of wildlife ecology using drones: New insights on the mating dynamics and operational sex ratios of sea turtles. Funct. Ecol. 2017, 31, 2310–2319. [Google Scholar] [CrossRef]
- Keller, B.; Willke, T. SnotBot: A whale of a deep-learning project. IEEE Spectr. 2019, 56, 41–53. [Google Scholar] [CrossRef]
- Pirotta, V.; Smith, A.; Ostrowski, M.; Russell, D.; Jonsen, I.D.; Grech, A.; Harcourt, R. An economical custom-built drone for assessing whale health. Front. Mar. Sci. 2017, 4, 425. [Google Scholar] [CrossRef]
- Barasona, J.A.; Mulero-Pázmány, M.; Acevedo, P.; Negro, J.J.; Torres, M.J.; Gortázar, C.; Vicente, J. Unmanned aircraft systems for studying spatial abundance of ungulates: Relevance to spatial epidemiology. PLoS ONE 2014, 9, e115608. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Michez, A.; Piégay, H.; Lisein, J.; Claessens, H.; Lejeune, P. Classification of riparian forest species and health condition using multi-temporal and hyperspatial imagery from unmanned aerial system. Environ. Monit. Assess. 2016, 188, 146. [Google Scholar] [CrossRef] [Green Version]
- Gonçalves, J.; Henriques, R.; Alves, P.; Sousa-Silva, R.; Monteiro, A.T.; Lomba, Â.; Marcos, B.; Honrado, J. Evaluating an unmanned aerial vehicle-based approach for assessing habitat extent and condition in fine-scale early successional mountain mosaics. Appl. Veg. Sci. 2016, 19, 132–146. [Google Scholar] [CrossRef] [Green Version]
- Paneque-Gálvez, J.; McCall, M.K.; Napoletano, B.M.; Wich, S.A.; Koh, L.P. Small drones for community-based forest monitoring: An assessment of their feasibility and potential in tropical areas. Forests 2014, 5, 1481–1507. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Hu, J.; Lian, J.; Fan, Z.; Ouyang, X.; Ye, W. Seeing the forest from drones: Testing the potential of lightweight drones as a tool for long-term forest monitoring. Biol. Conserv. 2016, 198, 60–69. [Google Scholar] [CrossRef]
- Lubow, B.C.; Ransom, J.I. Practical bias correction in aerial surveys of large mammals: Validation of hybrid double-observer with sightability method against known abundance of feral horse (Equus caballus) populations. PLoS ONE 2016, 11, e0154902. [Google Scholar] [CrossRef] [PubMed]
- Cirino, E. Drones Help Find Massive Penguin Colonies Hiding in Plain Sight. Available online: https://deeply.thenewhumanitarian.org/oceans/articles/2018/03/05/drones-help-find-massive-penguin-colonies-hiding-in-plain-sight (accessed on 3 May 2021).
- Chrétien, L.P.; Théau, J.; Ménard, P. Visible and thermal infrared remote sensing for the detection of white-tailed deer using an unmanned aerial system. Wildl. Soc. Bull. 2016, 40, 181–191. [Google Scholar] [CrossRef]
- Wich, S.; Dellatore, D.; Houghton, M.; Ardi, R.; Koh, L.P. A preliminary assessment of using conservation drones for Sumatran orang-utan (Pongo abelii) distribution and density. J. Unmanned Veh. Syst. 2015, 4, 45–52. [Google Scholar] [CrossRef]
- Sweeney, K.L.; Helker, V.T.; Perryman, W.L.; LeRoi, D.J.; Fritz, L.W.; Gelatt, T.S.; Angliss, R.P. Flying beneath the clouds at the edge of the world: Using a hexacopter to supplement abundance surveys of Steller sea lions (Eumetopias jubatus) in Alaska. J. Unmanned Veh. Syst. 2015, 4, 70–81. [Google Scholar] [CrossRef] [Green Version]
- Sykora-Bodie, S.T.; Bezy, V.; Johnston, D.W.; Newton, E.; Lohmann, K.J. Quantifying nearshore sea turtle densities: Applications of unmanned aerial systems for population assessments. Sci. Rep. 2017, 7, 1–7. [Google Scholar]
- Kiszka, J.J.; Mourier, J.; Gastrich, K.; Heithaus, M.R. Using unmanned aerial vehicles (UAVs) to investigate shark and ray densities in a shallow coral lagoon. Mar. Ecol. Prog. Ser. 2016, 560, 237–242. [Google Scholar] [CrossRef]
- Beranek, C.T.; Roff, A.; Denholm, B.; Howell, L.G.; Witt, R.R. Trialling a real-time drone detection and validation protocol for the koala (Phascolarctos cinereus). Aust. Mammal. 2020. [Google Scholar] [CrossRef]
- Torres, L.G.; Nieukirk, S.L.; Lemos, L.; Chandler, T.E. Drone up! Quantifying whale behavior from a new perspective improves observational capacity. Front. Mar. Sci. 2018, 5, 319. [Google Scholar] [CrossRef] [Green Version]
- Evans, I.; Jones, T.H.; Pang, K.; Evans, M.N.; Saimin, S.; Goossens, B. Use of drone technology as a tool for behavioral research: A case study of crocodilian nesting. Herpetol. Conserv. Biol. 2015, 10, 90–98. [Google Scholar]
- Groves, P.A.; Alcorn, B.; Wiest, M.M.; Maselko, J.M.; Connor, W.P. Testing unmanned aircraft systems for salmon spawning surveys. Facets 2016, 1, 187–204. [Google Scholar] [CrossRef]
- Stark, D.J.; Vaughan, I.P.; Evans, L.J.; Kler, H.; Goossens, B. Combining drones and satellite tracking as an effective tool for informing policy change in riparian habitats: A proboscis monkey case study. Remote Sens. Ecol. Conserv. 2018, 4, 44–52. [Google Scholar] [CrossRef]
- Junda, J.; Greene, E.; Bird, D.M. Proper flight technique for using a small rotary-winged drone aircraft to safely, quickly, and accurately survey raptor nests. J. Unmanned Veh. Syst. 2015, 3, 222–236. [Google Scholar] [CrossRef] [Green Version]
- Han, Y.G.; Yoo, S.H.; Kwon, O. Possibility of applying unmanned aerial vehicle (UAV) and mapping software for the monitoring of waterbirds and their habitats. J. Ecol. Environ. 2017, 41, 1–7. [Google Scholar] [CrossRef]
- Mulero-Pázmány, M.; Stolper, R.; Van Essen, L.; Negro, J.J.; Sassen, T. Remotely piloted aircraft systems as a rhinoceros anti-poaching tool in Africa. PLoS ONE 2014, 9, e83873. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Shaffer, M.J.; Bishop, J.A. Predicting and preventing elephant poaching incidents through statistical analysis, GIS-based risk analysis, and aerial surveillance flight path modeling. Trop. Conserv. Sci. 2016, 9, 525–548. [Google Scholar] [CrossRef] [Green Version]
- Bondi, E.; Fang, F.; Hamilton, M.; Kar, D.; Dmello, D.; Choi, J.; Hannaford, R.; Iyer, A.; Joppa, L.; Tambe, M.; et al. Spot poachers in action: Augmenting conservation drones with automatic detection in near real time. In Proceedings of the AAAI Conference on Artificial Intelligence, New Orleans, LA, USA, 2–7 February 2018; Volume 32. [Google Scholar]
- Barr, J.R.; Green, M.C.; DeMaso, S.J.; Hardy, T.B. Drone Surveys Do Not Increase Colony-wide Flight Behaviour at Waterbird Nesting Sites, But Sensitivity Varies Among Species. Sci. Rep. 2020, 10, 1–10. [Google Scholar] [CrossRef] [PubMed]
- Ditmer, M.A.; Vincent, J.B.; Werden, L.K.; Tanner, J.C.; Laske, T.G.; Iaizzo, P.A.; Garshelis, D.L.; Fieberg, J.R. Bears show a physiological but limited behavioral response to unmanned aerial vehicles. Curr. Biol. 2015, 25, 2278–2283. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bennitt, E.; Bartlam-Brooks, H.L.; Hubel, T.Y.; Wilson, A.M. Terrestrial mammalian wildlife responses to Unmanned Aerial Systems approaches. Sci. Rep. 2019, 9, 1–10. [Google Scholar] [CrossRef] [PubMed]
- Mulero-Pázmány, M.; Jenni-Eiermann, S.; Strebel, N.; Sattler, T.; Negro, J.J.; Tablado, Z. Unmanned aircraft systems as a new source of disturbance for wildlife: A systematic review. PLoS ONE 2017, 12, e0178448. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Irigoin-Lovera, C.; Luna, D.M.; Acosta, D.A.; Zavalaga, C.B. Response of colonial Peruvian guano birds to flying UAVs: Effects and feasibility for implementing new population monitoring methods. PeerJ 2019, 7, e8129. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hodgson, J.C.; Koh, L.P. Best practice for minimising unmanned aerial vehicle disturbance to wildlife in biological field research. Curr. Biol. 2016, 26, R404–R405. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chabot, D.; Bird, D.M. Wildlife research and management methods in the 21st century: Where do unmanned aircraft fit in? J. Unmanned Veh. Syst. 2015, 3, 137–155. [Google Scholar] [CrossRef] [Green Version]
- Vas, E.; Lescroël, A.; Duriez, O.; Boguszewski, G.; Grémillet, D. Approaching birds with drones: First experiments and ethical guidelines. Biol. Lett. 2015, 11, 20140754. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Barnas, A.; Newman, R.; Felege, C.J.; Corcoran, M.P.; Hervey, S.D.; Stechmann, T.J.; Rockwell, R.F.; Ellis-Felege, S.N. Evaluating behavioral responses of nesting lesser snow geese to unmanned aircraft surveys. Ecol. Evol. 2018, 8, 1328–1338. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Srinivasan, M.V.; Davey, M. Strategies for active camouflage of motion. Proc. R. Soc. Lond. Ser. B Biol. Sci. 1995, 259, 19–25. [Google Scholar]
- Anderson, A.J.; McOwan, P.W. Humans deceived by predatory stealth strategy camouflaging motion. Proc. R. Soc. Lond. Ser. B Biol. Sci. 2003, 270, S18–S20. [Google Scholar] [CrossRef] [Green Version]
- Schroeder, N.M.; Panebianco, A.; Gonzalez Musso, R.; Carmanchahi, P. An experimental approach to evaluate the potential of drones in terrestrial mammal research: A gregarious ungulate as a study model. R. Soc. Open Sci. 2020, 7, 191482. [Google Scholar] [CrossRef] [Green Version]
- Dronethusiast. What Are the Best Silent Drone Choices and What Applications Are They Good for. Available online: https://www.dronethusiast.com/what-are-the-best-silent-drone-choices-and-what-applications-are-they-good-for/ (accessed on 9 July 2020).
- Delson Aeronautics. Ultra-Quiet UAV Blades. Available online: https://delsonaero.com/uav-blades/ (accessed on 19 June 2020).
- Simmie, S. Canadian Company Releases Video of Its Low-Noise Drone Props. Available online: https://dronedj.com/2021/01/22/canadian-company-releases-video-of-its-low-noise-drone-props/ (accessed on 19 June 2020).
- Huang, H.; Savkin, A.V. An algorithm of efficient proactive placement of autonomous drones for maximum coverage in cellular networks. IEEE Wirel. Commun. Lett. 2018, 7, 994–997. [Google Scholar] [CrossRef]
- Savkin, A.V.; Huang, H. Deployment of unmanned aerial vehicle base stations for optimal quality of coverage. IEEE Wirel. Commun. Lett. 2019, 8, 321–324. [Google Scholar] [CrossRef]
- Huang, H.; Savkin, A.V. A method for optimized deployment of unmanned aerial vehicles for maximum coverage and minimum interference in cellular networks. IEEE Trans. Ind. Inform. 2018, 15, 2638–2647. [Google Scholar] [CrossRef]
- Li, X. Deployment of Drone Base Stations for Cellular Communication without Apriori User Distribution Information. In Proceedings of the 2018 37th Chinese Control Conference (CCC), Wuhan, China, 25–27 July 2018; pp. 7274–7281. [Google Scholar]
- Li, X.; Xing, L. Optimal Deployment of Drone Base Stations for Cellular Communication by Network-based Localization. In Proceedings of the 2018 37th Chinese Control Conference (CCC), Wuhan, China, 25–27 July 2018; pp. 7282–7287. [Google Scholar]
- Huang, H.; Savkin, A.V.; Ding, M.; Kaafar, M.A. Optimized deployment of drone base station to improve user experience in cellular networks. J. Netw. Comput. Appl. 2019, 144, 49–58. [Google Scholar] [CrossRef]
- Savkin, A.V.; Huang, H. Range-Based Reactive Deployment of Autonomous Drones for Optimal Coverage in Disaster Areas. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 4606–4610. [Google Scholar] [CrossRef]
- Kalantari, E.; Shakir, M.Z.; Yanikomeroglu, H.; Yongacoglu, A. Backhaul-aware robust 3D drone placement in 5G+ wireless networks. In Proceedings of the 2017 IEEE International Conference on Communications Workshops (ICC Workshops), Shanghai, China, 20–24 May 2019; pp. 109–114. [Google Scholar]
- Coldrey, M.; Engström, U.; Helmersson, K.W.; Hashemi, M.; Manholm, L.; Wallentin, P. Wireless backhaul in future heterogeneous networks. Ericsson Rev. 2014, 91, 1–11. [Google Scholar]
- Fouda, A.; Ibrahim, A.S.; Guvenc, I.; Ghosh, M. UAV-Based in-band Integrated Access and Backhaul for 5G Communications. In Proceedings of the 2018 IEEE 88th Vehicular Technology Conference (VTC-Fall), Chicago, IL, USA, 27–30 August 2018; pp. 1–5. [Google Scholar]
- Lyu, J.; Zeng, Y.; Zhang, R.; Lim, T.J. Placement optimization of UAV-mounted mobile base stations. IEEE Commun. Lett. 2016, 21, 604–607. [Google Scholar] [CrossRef] [Green Version]
- Bai, T.; Pan, C.; Wang, J.; Deng, Y.; Elkashlan, M.; Nallanathan, A.; Hanzo, L. Dynamic Aerial Base Station Placement for Minimum-Delay Communications. IEEE Internet Things J. 2020. [Google Scholar] [CrossRef]
- Qiu, C.; Wei, Z.; Yuan, X.; Feng, Z.; Zhang, P. Multiple UAV-Mounted Base Station Placement and User Association with Joint Fronthaul and Backhaul Optimization. IEEE Trans. Commun. 2020, 68, 5864–5877. [Google Scholar] [CrossRef]
- Qiu, C.; Wei, Z.; Feng, Z.; Zhang, P. Backhaul-Aware Trajectory Optimization of Fixed-Wing UAV-Mounted Base Station for Continuous Available Wireless Service. IEEE Access 2020, 8, 60940–60950. [Google Scholar] [CrossRef]
- Al-Ahmed, S.A.; Shakir, M.Z.; Zaidi, S.A.R. Optimal 3D UAV base station placement by considering autonomous coverage hole detection, wireless backhaul and user demand. J. Commun. Netw. 2020, 22, 467–475. [Google Scholar] [CrossRef]
- Mardeni, R.; Shahabi, P.; Riahimanesh, M. Mobile station localization in wireless cellular systems using UTDOA. In Proceedings of the 2012 International Conference on Microwave and Millimeter Wave Technology (ICMMT), Shenzhen, China, 5–8 May 2012; Volume 5, pp. 1–4. [Google Scholar]
- Hamdy, Y.R.; Mawjoud, S.A. Performance assessment of U-TDOA and A-GPS positioning methods. In Proceedings of the 2012 International Conference on Future Communication Networks, Baghdad, Iraq, 2–5 April 2012; pp. 99–104. [Google Scholar]
- Savkin, A.V.; Wang, C. Seeking a path through the crowd: Robot navigation in unknown dynamic environments with moving obstacles based on an integrated environment representation. Robot. Auton. Syst. 2014, 62, 1568–1580. [Google Scholar] [CrossRef]
- Matveev, A.S.; Wang, C.; Savkin, A.V. Real-time navigation of mobile robots in problems of border patrolling and avoiding collisions with moving and deforming obstacles. Robot. Auton. Syst. 2012, 60, 769–788. [Google Scholar] [CrossRef]
- Wang, J.; Liu, Y.; Song, H. Counter-Unmanned Aircraft System(s) (C-UAS): State of the Art, Challenges, and Future Trends. IEEE Aerosp. Electron. Syst. Mag. 2021, 36, 4–29. [Google Scholar] [CrossRef]
- Wang, J.; Yue, X.; Liu, Y.; Song, H.; Yuan, J.; Yang, T.; Seker, R. Integrating ground surveillance with aerial surveillance for enhanced amateur drone detection. In Disruptive Technologies in Information Sciences; International Society for Optics and Photonics: San Diego, CA, USA, 2018; Volume 10652, p. 106520E. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Applications | Species | References |
|---|---|---|
| Health Monitoring | Whale | [62,63] |
| Ungulates | [64] | |
| Forest | [65,66,67,68] | |
| Population Survey | Feral horse | [69] |
| Penguin | [70] | |
| White-tailed deer | [71] | |
| Sumatran orangutan | [72] | |
| Sea Lion | [73] | |
| Sea turtles | [74] | |
| Shark | [75] | |
| Koala | [76] | |
| Behaviour Research | Sea turtles | [61] |
| Whale | [77] | |
| Crocodiles | [78] | |
| Salmon | [79] | |
| Habitats Investigation | Proboscis monkey | [80] |
| Raptor | [81] | |
| Waterbirds | [82] | |
| Anti-poaching | Rhinoceros | [83] |
| Elephant | [84,85] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, X.; Savkin, A.V. Networked Unmanned Aerial Vehicles for Surveillance and Monitoring: A Survey. Future Internet 2021, 13, 174. https://doi.org/10.3390/fi13070174
Li X, Savkin AV. Networked Unmanned Aerial Vehicles for Surveillance and Monitoring: A Survey. Future Internet. 2021; 13(7):174. https://doi.org/10.3390/fi13070174
Chicago/Turabian StyleLi, Xiaohui, and Andrey V. Savkin. 2021. "Networked Unmanned Aerial Vehicles for Surveillance and Monitoring: A Survey" Future Internet 13, no. 7: 174. https://doi.org/10.3390/fi13070174
APA StyleLi, X., & Savkin, A. V. (2021). Networked Unmanned Aerial Vehicles for Surveillance and Monitoring: A Survey. Future Internet, 13(7), 174. https://doi.org/10.3390/fi13070174