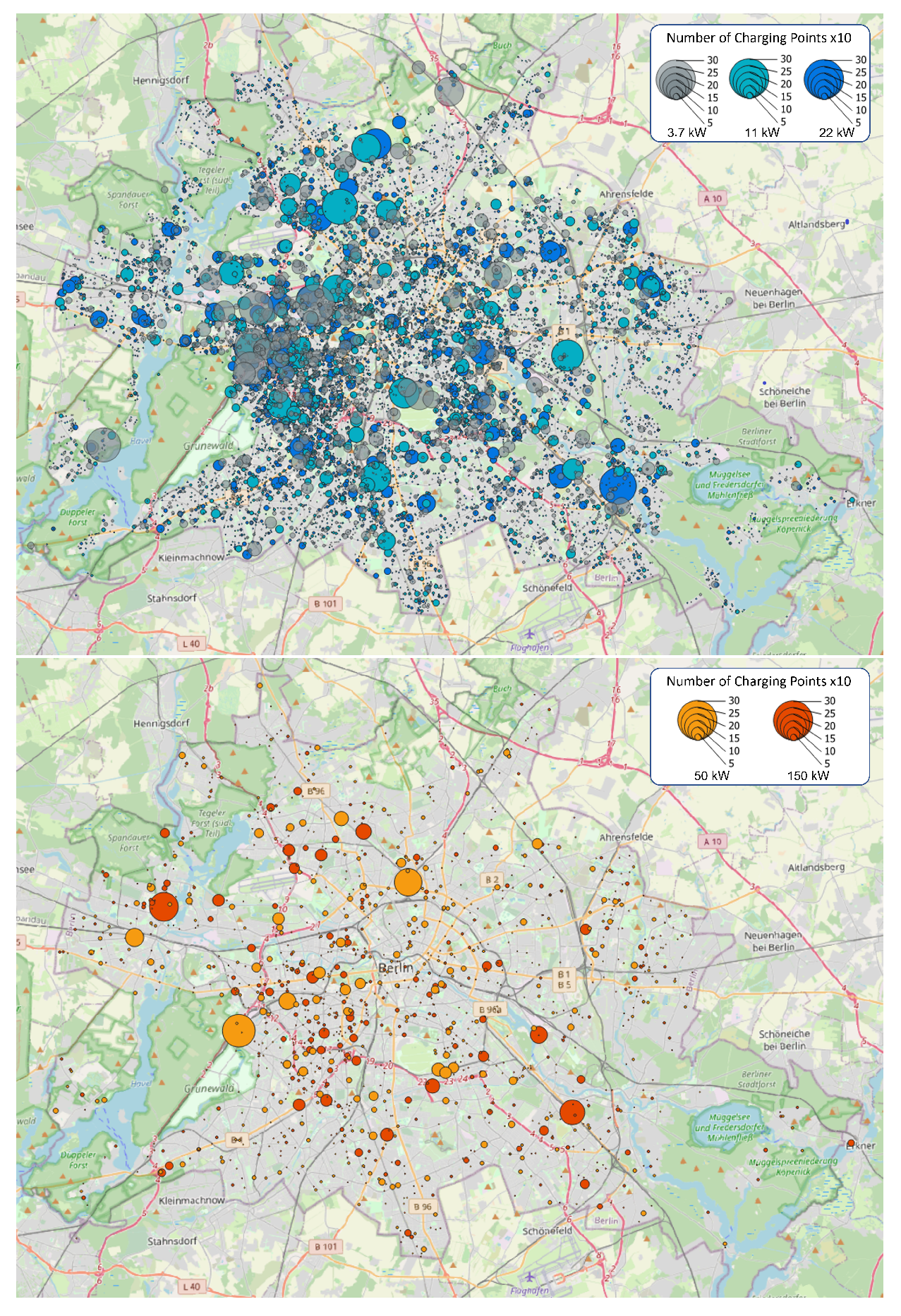
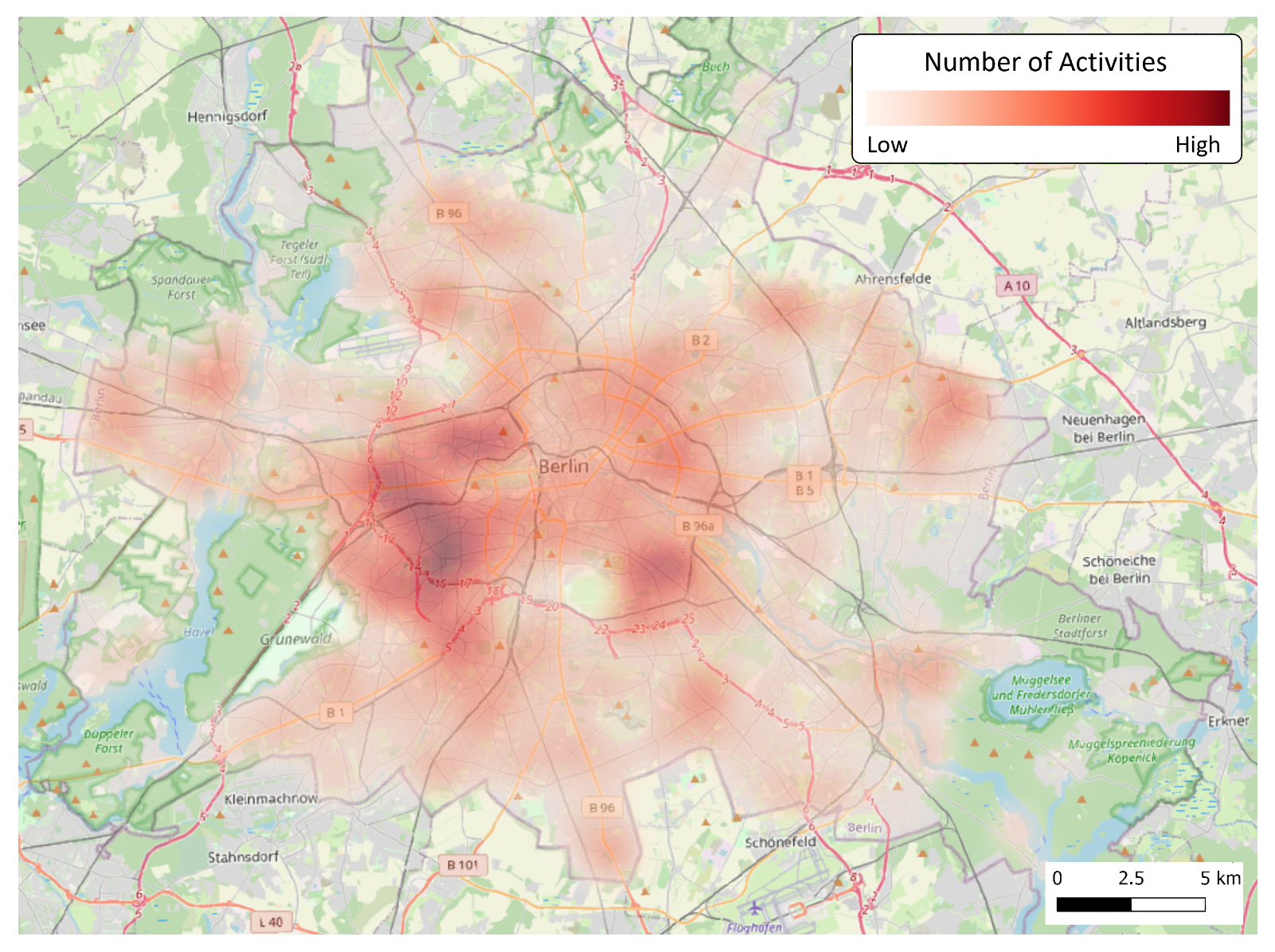
The results of the 100th generation showed charging infrastructure scenarios that had between 112,040 and 379,690 charging points. Charging points with a power of 3.7 kW had the biggest share, with 36.5%, on average, whereas the average share of charging powers of 11 kW and 22 kW was 26.6% and 26.1%. The share of fast charging infrastructure amounted to 10.1%, on average, and was distributed equally for 50 kW and 150 kW. The capital costs were between EUR 624 million and EUR 5.7 billion. Furthermore, the average detours of agents were from 254 m to 590 m across all solutions. Moreover, all solutions were able to cover the energy requirements of most of the agents within the investigated scenario. The highest share of agents that ran out of energy was 3.05%, whereas the lowest share was 2.52%. The investigation of the spatial distribution of the charging infrastructure showed that the solutions prevailed when the charging infrastructure had a similar spatial distribution to the activities of the agents in the MATSim scenario. The distribution of activities is shown in
Figure 12. The summarized results are discussed below, together with the used methodology.
5.1. Results
Back in 2014, the directive of the European Parliament for the deployment of alternative fuel infrastructure specified that there should be, on average, at least one charging point per ten vehicles [
33]. With a ratio of 11:1 of vehicles to charging points, the bottom-edge solution is closest to this directive among the three investigated solutions. Since this solution is able to supply most agents in the MATSim scenario, the European directive can be scrutinized in relation to the requirements of charging infrastructure in urban areas. Moreover, the saturation effect mentioned by Stroband [
17] should be taken into account, which shows that the additionally required charging infrastructure decreases with the increasing market penetration of BEVs. Additionally, it can be assumed that this effect is amplified in densely populated areas, where the distances between charging points are lower compared to rural areas. This is why a vehicle-to-charging point ratio of 11:1 would be appropriate for a city such as Berlin if the market share of BEVs is 100% and the spatial distribution of the charging infrastructure is adequate. From this perspective, the mid-front and top-edge solutions seem to be oversized. To avoid the investigation of these oversized solutions in future works, it would be helpful to set appropriate limits for the search space.
In contrast, the amount of charging points cannot be assessed without taking into account the average detour of agents to the next available charging point, which has a strong influence on the usability and efficiency of the charging infrastructure. Due to a deficiency in the empirical data regarding the operation of the entire charging infrastructure, it is not possible to make a statement about the average detour distance that leads to the highest possible acceptance of the users. Here, it may be useful to draw a comparison to the infrastructure planning of public transport (PT). In the Berlin local transport plan 2019–2023, it is specified that for 90% of the population, the distance from a residence to the next PT station should not exceed 500 m [
34]. Another comparative value could be the distance between car-sharing stations. According to Bundesverband CarSharing, a distance of 300 m from one car-sharing station to another is considered very accessible, whereas a distance of 500 m is considered acceptable [
35]. These examples all have in common the distances that need to be covered by the user to access the service offered. Therefore, it can be assumed that if there is acceptance of users for other transport services under the given circumstances, there is also acceptance of users of BEVs for the public charging infrastructure under similar circumstances. The mean detour affects the costs of the charging infrastructure significantly. The bottom edge solution with a mean detour of 590 m can be evaluated as still acceptable considering the tolerated distance of 500 m. According to the assumptions of the local transport plan and Bundesverband CarSharing, the mean detour of 590 m is too high for high user acceptance. Considering this, the mid-front and top-edge solutions with mean detours of 378 m and 254 m are preferred. However, these solutions lead to much higher capital costs. Therefore, effective planning of charging infrastructure should consider the detours that lead to high user acceptance. Another aspect of analyzing the agents who reached 0% is the small difference between the solutions despite the major differences in the numbers of charging points and conducted charging processes. One explanation for this is that the MATSim scenario of Berlin lasts only 36 h and agents starting with a high SoC who cover only short distances do not run out of energy within the scenario, even if they have no charger available during their journey.
Moreover, the calculated capital costs for the different charging infrastructure scenarios have to be discussed critically. It is necessary to note that the capital costs should be considered as a rough estimation of the real capital costs. They are primarily used to compare the solutions. Different factors could lead to changes in capital costs. Not considered are, e.g., future price changes and economies of scale, which the acquisition of a large number of charging points could lead to. Furthermore, the calculation of capital costs does not consider that the first charging point at a link is more expensive than the following charging points at the same link. One reason is that certain prerequisites such as transformer stations are only needed once for a certain number of charging points. In addition, this paper does not consider investment for the expansion of the power grid, which would be necessary for the provision of the required power.
Besides the detours and capital costs, it is important that the charging infrastructure can adequately cover the energy demand of the agents. The three investigated solutions show a difference of only 0.5% in the number of agents who run out of energy. Each solution is able to supply nearly all agents in the MATSim scenario. It can be stated that the higher the covered distance of an agent during the day, the higher the probability that the agent runs out of energy during the simulation. In the bottom-edge solution, the average distance these agents cover is 193 km, whereas it is 197 km in the top-edge solution. This means that the top-edge solution can supply agents who cover long distances slightly better. This can be due to different reasons, e.g., the higher share of fast charging infrastructure or higher spatial coverage of charging points in general. However, the small advantage in supplied agents is not justifiable considering the huge difference in capital costs between the two solutions.
Furthermore, the aspects not covered by the algorithm should be discussed. For example, it is not possible to gather information about the agents who would run out of energy unless the scenario of the simulation lasts a couple of days rather than 36 h. In such a scenario, agents who cover short distances every day but have no charging points available in their environment could reach an SoC of zero percent. Since a multiple-day scenario would require significantly higher computational capacity, it would be more efficient to extrapolate the SoC of the agents based on the availability of charging points on their trips. This additional step in the algorithm can be implemented without much effort and would lead to higher quality information about the energy supply of the agents. Moreover, agents who run out of energy because they only execute activities outside of Berlin where no charging points are available, except the home charger at their home link, cannot be determined. In addition, an inconvenient assignment of the vehicle class can cause an SoC of zero percent if an agent who covers a high distance is assigned a vehicle with a small battery. Although the proportions of the different vehicle classes in the simulation are related to the real share of vehicle classes, the final assignment of the vehicle class to an agent happens randomly. This inconvenient combination of agent and vehicle class increases the probability of reaching a zero percent SoC. In reality, a person would probably choose a vehicle appropriate for his/her needs.
Furthermore, the distributions of the different charging points are discussed. The solutions show that charging points with a charging power of 3.7 kW are dominant. A high number of these charging points in cities is possible because they can be easily integrated into the posts of street lights and are sufficient for charging a vehicle if the standing times are long enough. Due to the fact that a large number of car owners in Berlin park their vehicles in public spaces in the street overnight, it seems plausible that 3.7 kW charging points would have an appropriate use case here. These charging points also cause a lower load on the power grid compared to charging points with higher power. Nevertheless, a high number of 3.7 kW charging points also has some drawbacks. If they are not integrated into a light post, the large number of charging points needed could cause unnecessary high consumption of space. In addition, the low charging power could lead to limited usability for some car owners who do not park their cars for long periods of time in a certain area but still want to charge their vehicles sufficiently. Therefore, more data about the efficiency of charging processes during the simulation should be generated to evaluate where car owners are exposed to major disadvantages due to the low charging power. The share of fast charging points is 10.1%, on average, in all solutions of the final front, which is an appropriate percentage according to the conditions of the MATSim scenario. However, the low share of fast charging infrastructure in the bottom-edge solution shows that there are also suitable infrastructure scenarios with fewer fast charging points that are situated in the right places. These solutions would, accordingly, show lower capital costs.
The last aspect of the discussion of the results is that of the spatial distribution of the charging infrastructure. It is clear that the solutions show a comprehensive charging infrastructure (
Section 4). The spatial distribution correlates with the distribution of activities started in the MATSim scenario. There are no large areas observed without any kind of charging infrastructure. The tendencies that are observed in the bottom-edge solution also continue in solutions with a higher total number of charging points. Besides the comprehensive distribution of the charging infrastructure, there are single links that show clusters of charging points. These links also show high numbers of simultaneous activities, which means that the limitation of the charging points using the maximum number of simultaneous activities and link lengths delivers realistic results. The links featuring clusters of charging points are mainly situated near train stations, public parking spaces, hospitals, and other highly frequented places for leisure activities, e.g., Tempelhofer Feld, Tierpark Berlin, the environment of the Gärten der Welt in Marzahn-Hellersdorf, and the environment around Charlottenburg train station. These examples are taken from the mid-front solution but the described observations can, in general, be confirmed by all the investigated solutions. It seems that the algorithm calculates reasonable solutions considering the used input data. This indicates that extending the input data by also considering other influencing factors on the requirement of charging points or the ability of a link to host charging points could lead to more significant results. The separate investigation of the fast charging infrastructure shows that it corresponds to the observations already described, except for the bottom-edge solution, which shows some supply gaps because of the very low share of fast charging points. Fast charging infrastructure also concentrates on highly frequented streets or train stations. Especially interesting are the clusters along city highways, where several links with a high number of charging points can be observed. This is even observed in the bottom-edge solution despite the low share of fast charging infrastructure. This seems reasonable because urban highways are highly frequented, especially in rush-hour traffic. Therefore, it is likely that many activities would be started relatively close to them. Moreover, urban highways are often used to cover long distances within the city or for entering or leaving the city. Therefore, it seems reasonable that the agents can increase their ranges in a short amount of time due to the proximity of fast charging infrastructure. It is important to mention that this cannot be done intentionally from the algorithm using the MATSim Open Berlin scenario 5.3. Since this MATSim scenario does not feature electric vehicles, it also does not consider activities that are started specifically for charging a vehicle. The need for charging points depends on the number of activities with other purposes only. Another example of this is the cluster of fast charging points in the mid-front solution located at the Grunewald train station in western Berlin. The train station is situated next to a highway that connects Potsdam and Berlin and is highly frequented by commuters. Theoretically, it is reasonable that there are fast charging points for commuters leaving or entering Berlin to increase their ranges in less time. Since those activities are not featured in the scenario, the reason the algorithm places the charging points there is a high number of leisure activities that are started at this location. Furthermore, not all clusters are easy to justify. In a few cases, there are clusters of 100 or more charging points on small streets. In these cases, further investigations are needed. Even though the algorithm indirectly considers the space at a link by considering its length, it must be taken into account that the algorithm cannot consider the available power supply or the structural conditions at the link, e.g., bike lanes or rail transport facilities. This means that the algorithm does not consider whether the power grid at the affected link is able to supply the amount of charging points or whether the link is suitable for charging infrastructure due to its special structural conditions. The potential for load shifting between the power grid and battery electric vehicles is also not investigated. These issues are investigated by Straub et al. [
11].



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}