

A Study on the Performance of the Electrification of Hydraulic Implements in a Compact Non-Road Mobile Machine: A Case Applied to a Backhoe Loader
 , , , ,
, , , ,  and
and
Abstract
1. Introduction
2. Electrification of Non-Road Mobile Machinery
2.1. Classification by Usage
2.2. Classification by Power Demand
2.3. Electrification Strategies: Current Achievements and Challenges
2.4. Simulation Strategies: Current Methodologies
3. Backhoe System Description
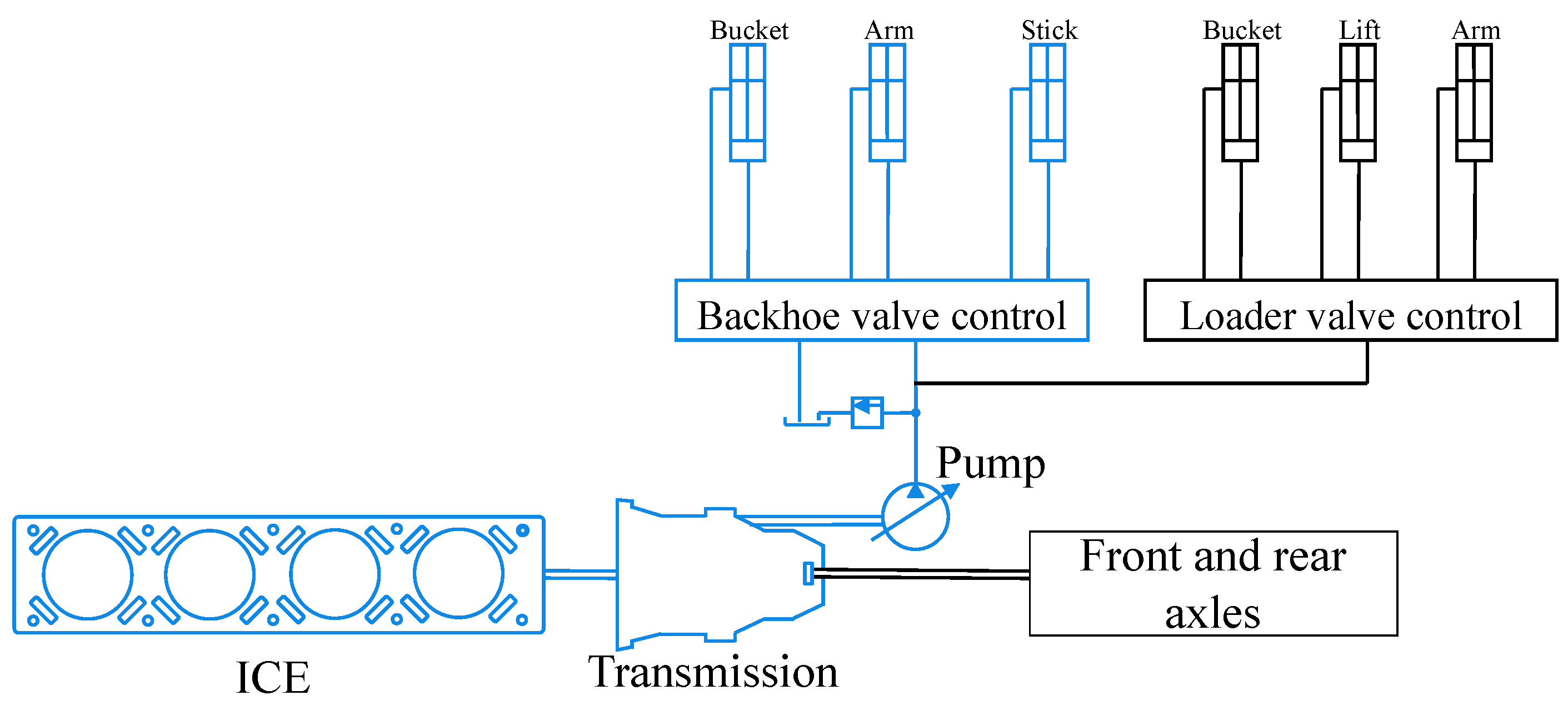
3.1. Traditional Architecture
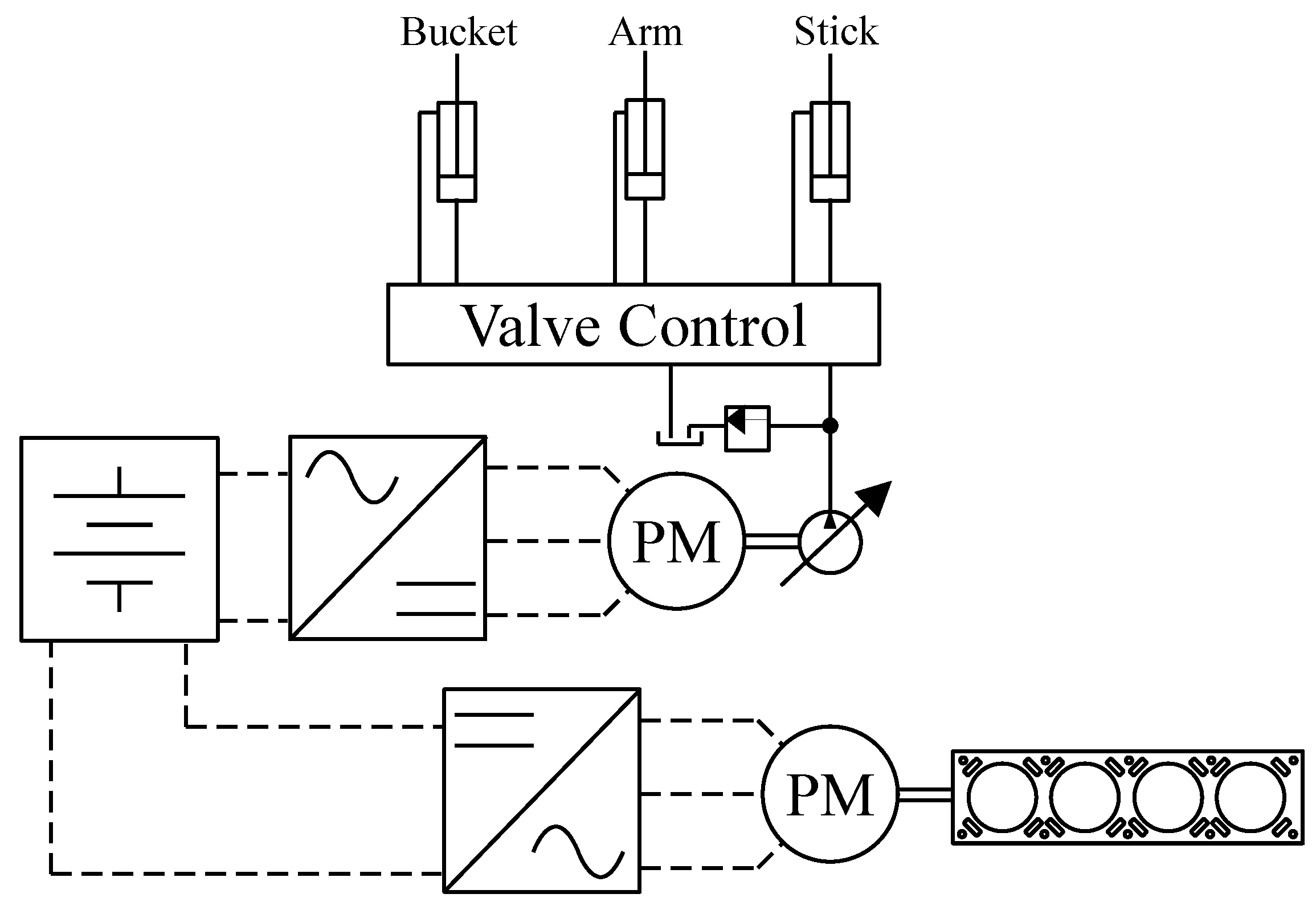
3.2. Hybrid Architecture
4. Hybrid Compact Non-Road Mobile Machine Characterization
4.1. Characterization of the Backhoe Loader
Hydraulic System
4.2. Drive Cycle
4.3. Engine, Electrical Machine, and Energy Store System Model
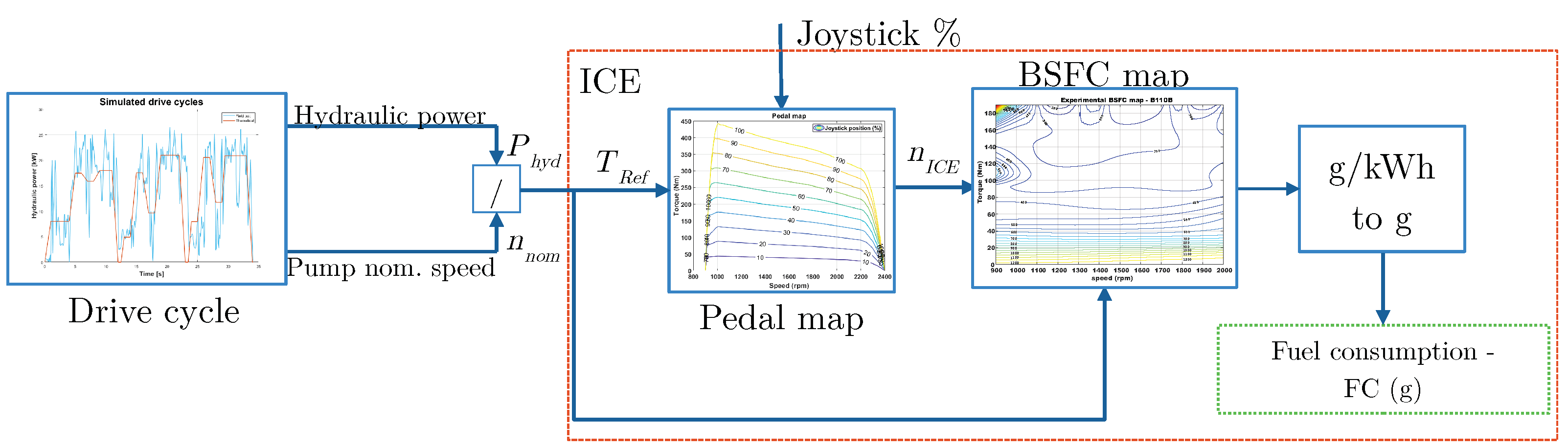
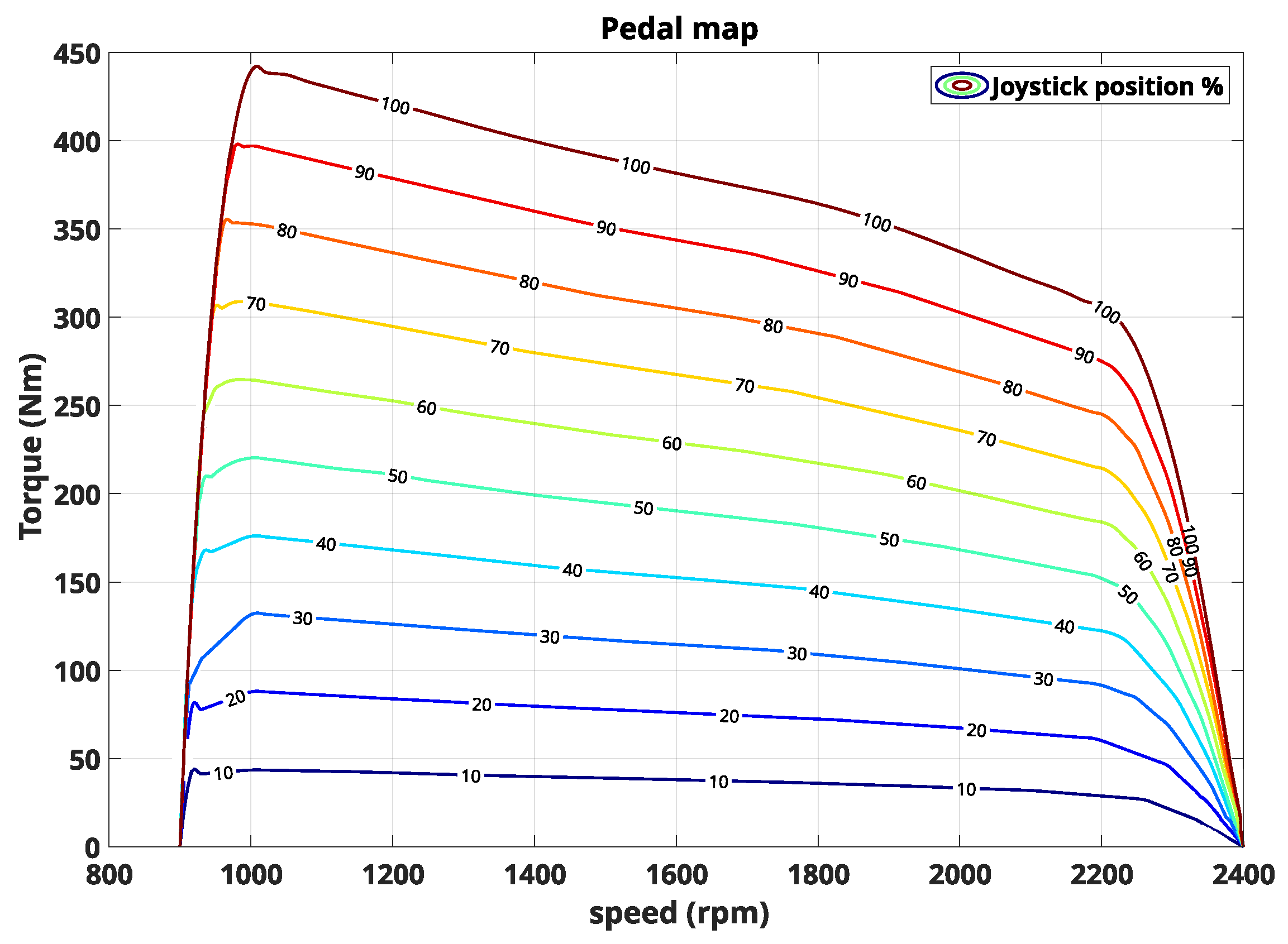
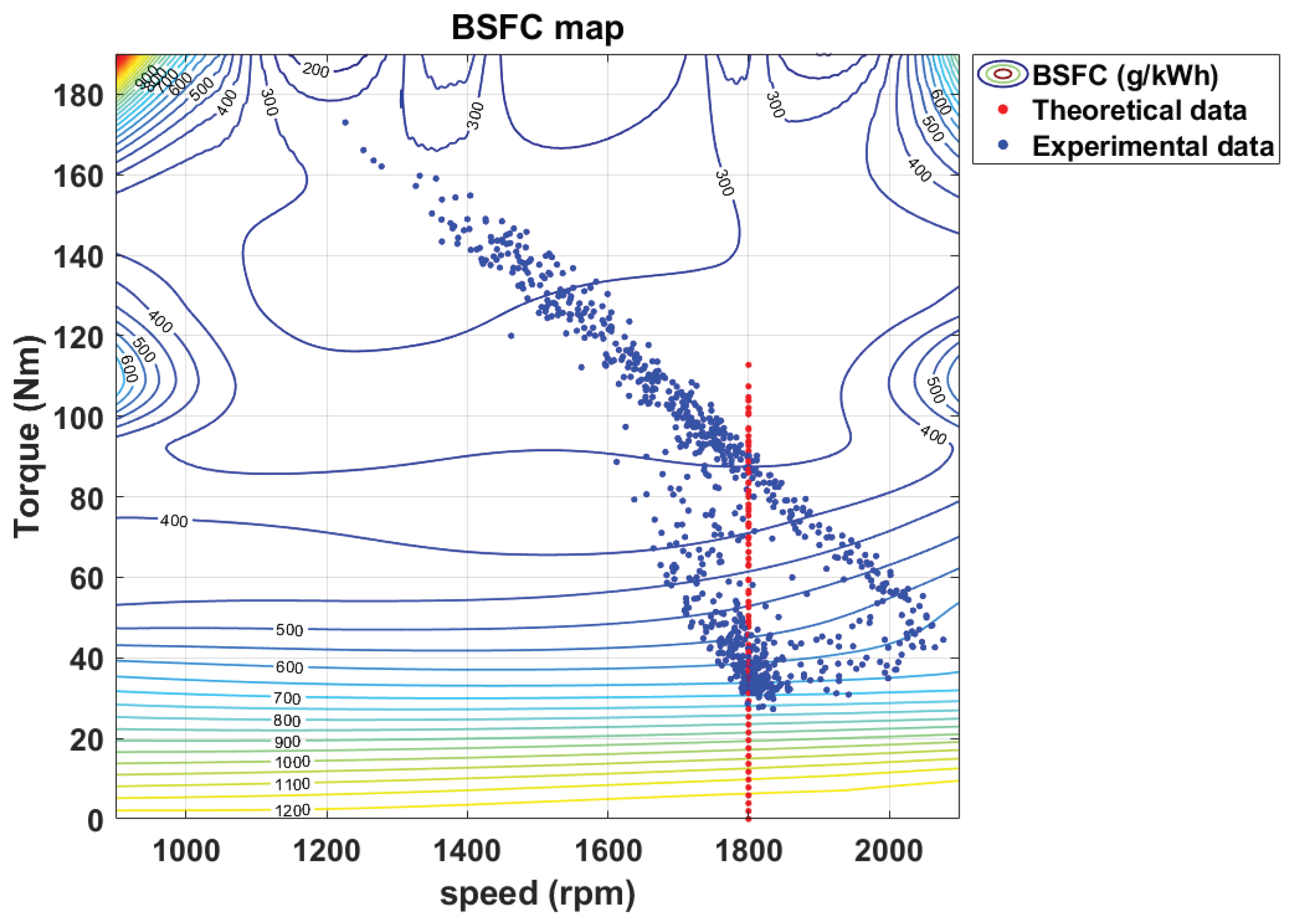
4.3.1. Internal Combustion Engine
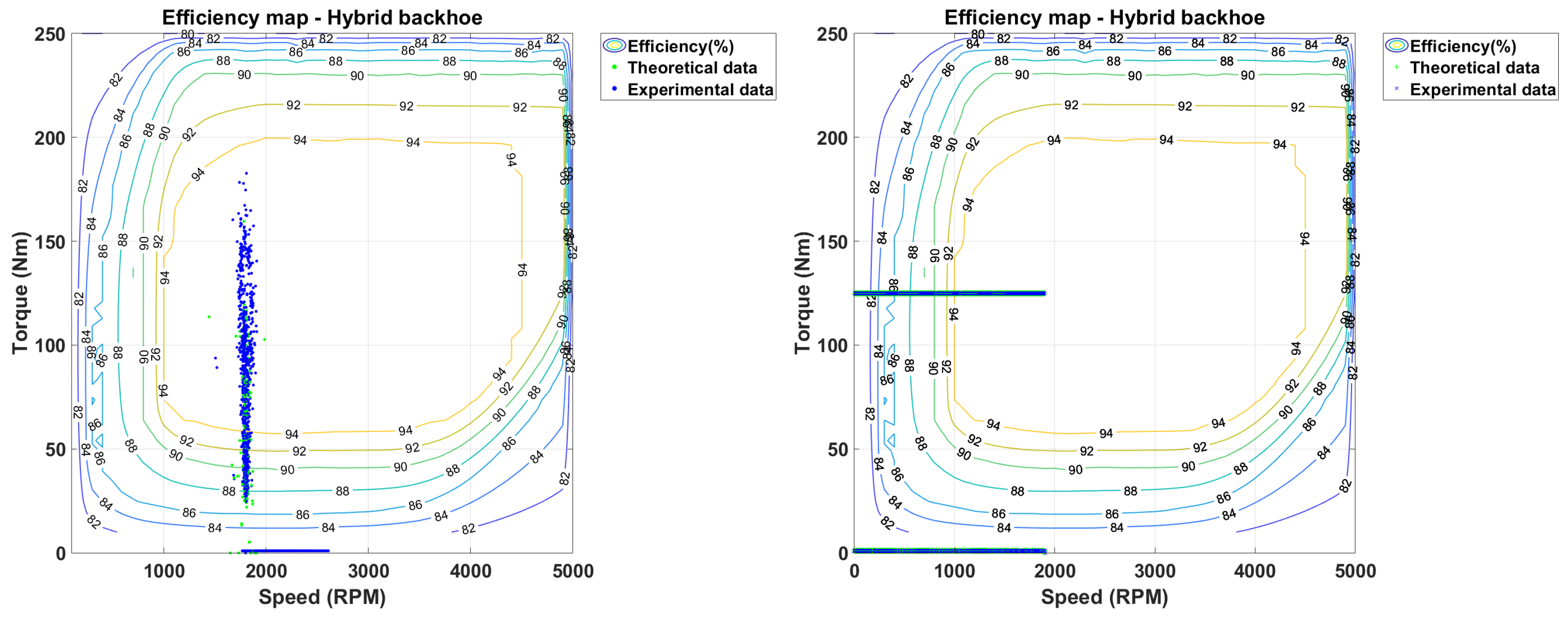
4.3.2. Electric Machine
4.3.3. Energy Storage System
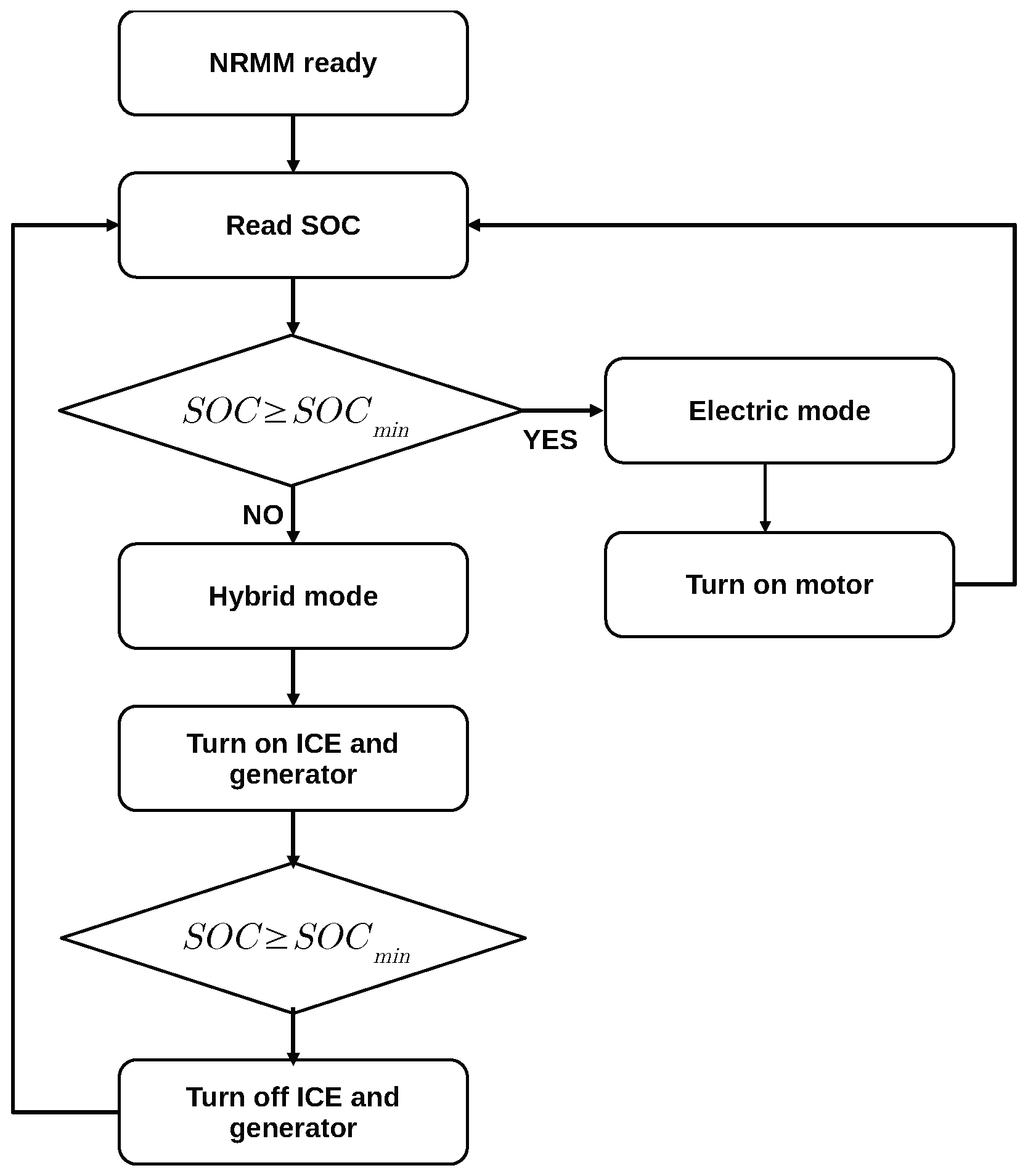
4.4. Energy Management System
5. Discussion and Results
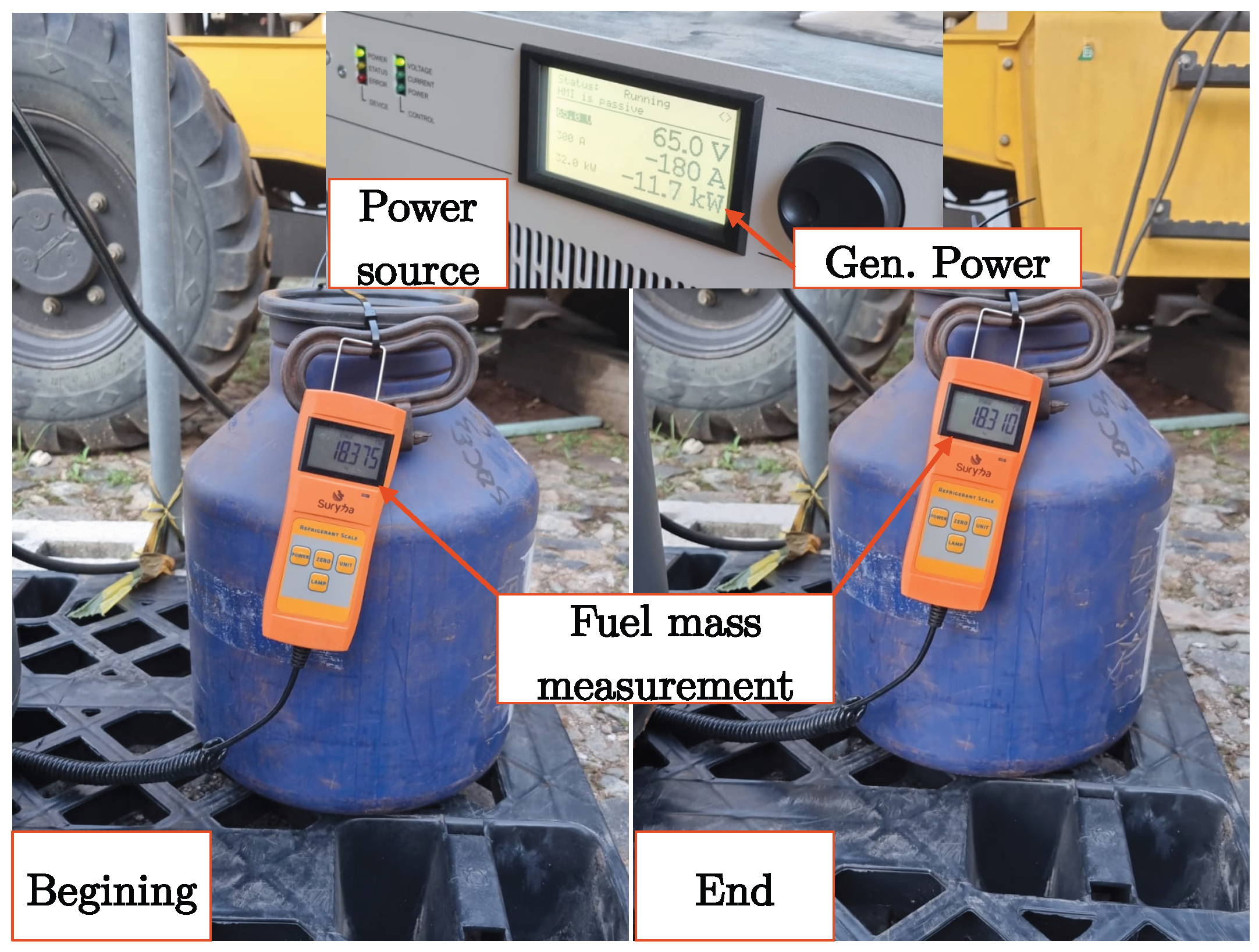
5.1. Experimental Tests
- Operation of the generator;
- Operation of the electric drive of the rear implement.
5.2. Simulations
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| BSFC | Brake-specific fuel consumption |
| C | Compact |
| CO | Carbon monoxides |
| DC | Direct current |
| EL | Extra-large |
| FC | Fuel consumption |
| FTP | Federal Test Procedure |
| Genset | Generation system |
| HC | Hydrocarbons |
| HWFET | Highway Fuel Economy Test Cycle |
| ICE | Internal combustion engine |
| L | Large |
| LA92 | EPA—California unified cycle |
| M | Medium |
| Mi | Mini |
| Nitrogen oxides | |
| NRMM | Non-road mobile machine |
| S | Small |
| SoC | State of charge |
References
- U.S. Department of Transportation, The Transportation Future: Trends, Transportation, and Travel. The Transportation Future: Trends, Transportation, and Travel Transportation Policy Study Topics. 2021. Available online: https://www.fhwa.dot.gov/policy/otps/TPS_2020_Trends_Report.pdf (accessed on 4 January 2024).
- European Commission. Non-Road Mobile Machinery Emissions. 2020. Available online: https://ec.europa.eu/growth/sectors/automotive/environment-protection/non-road-mobile-machinery_en (accessed on 17 December 2023).
- Hagan, R.; Markey, E.; Clancy, J.; Keating, M.; Donnelly, A.; O’Connor, D.J.; Morrison, L.; McGillicuddy, E.J. Non-Road Mobile Machinery Emissions and Regulations: A Review. Air 2023, 1, 14–36. [Google Scholar] [CrossRef]
- Beltrami, D.; Iora, P.; Tribioli, L.; Uberti, S. Electrification of Compact Off-Highway Vehicles—Overview of the Current State of the Art and Trends. Energies 2021, 14, 5565. [Google Scholar] [CrossRef]
- Brenna, M.; Foiadelli, F.; Leone, C.; Longo, M.; Zaninelli, D. Feasibility Proposal for Heavy Duty Farm Tractor. In Proceedings of the 2018 International Conference of Electrical and Electronic Technologies for Automotive, Milan, Italy, 9–11 July 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Un-Noor, F.; Scora, G.; Wu, G.; Boriboonsomsin, K.; Perugu, H.; Collier, S.; Yoon, S. Operational Feasibility Assessment of Battery Electric Construction Equipment Based on In-Use Activity Data. Transp. Res. Rec. 2021, 2675, 809–820. [Google Scholar] [CrossRef]
- Vu, N.-L.; Messier, P.; Nguyen, B.-H.; Vo-Duy, T.; Trovão, J.P.F.; Desrochers, A.; Rodrigues, A. Energy-optimization design and management strategy for hybrid electric non-road mobile machinery: A case study of snowblower. Energy 2023, 284, 129249. [Google Scholar] [CrossRef]
- Troncon, D.; Alberti, L.; Mattetti, M. A Feasibility Study for Agriculture Tractors Electrification: Duty Cycles Simulation and Consumption Comparison. In Proceedings of the 2019 IEEE Transportation Electrification Conference and Expo (ITEC), Detroit, MI, USA, 19–21 June 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Grammatico, S.; Balluchi, A.; Cosoli, E. A series-parallel hybrid electric powertrain for industrial vehicles. In Proceedings of the 2010 IEEE Vehicle Power and Propulsion Conference, Lille, France, 1–3 September 2010; pp. 1–6. [Google Scholar] [CrossRef]
- Somà, A. Trends and Hybridization Factor for Heavy-Duty Working Vehicles. In Hybrid Electric Vehicles; InTech: London, UK, 2017; pp. 3–32. [Google Scholar] [CrossRef]
- Wang, H.; Wang, Q.; Hu, B. A review of developments in energy storage systems for hybrid excavators. Autom. Constr. 2017, 80, 1–10. [Google Scholar] [CrossRef]
- Dalboni, M.; Santarelli, P.; Patroncini, P.; Soldati, A.; Concari, C.; Lusignani, D. Electrification of a Compact Agricultural Tractor: A Successful Case Study. In Proceedings of the 2019 IEEE Transportation Electrification Conference and Expo (ITEC), Detroit, MI, USA, 19–21 June 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Mattarelli, E.; Rinaldini, C.A.; Scrignoli, F.; Fregni, P.; Gaioli, S.; Franceschini, G.; Barater, D. Potential of Electrification Applied to Non-Road Diesel Engines (SAE Technical Paper No. 2019-24-0202); SAE International: Warrendale, PA, USA, 2019. [Google Scholar] [CrossRef]
- Moreira, W.K. Análise e Projeto de Sistemas de Propulsão híBridos para Tratores agríColas. Analysis and Design of Hybrid Propulsion Systems for Agricultural Tractors; Universidade Federal de Santa Maria. 2022. Available online: http://repositorio.ufsm.br/handle/1/27052 (accessed on 31 August 2022).
- Lajunen, A. Simulation of energy efficiency and performance of electrified powertrains in agricultural tractors. In Proceedings of the 2022 IEEE Vehicle Power and Propulsion Conference (VPPC), Merced, CA, USA, 1–4 November 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Zhang, B.; Guo, S.; Zhang, X.; Xue, Q.; Teng, L. Adaptive Smoothing Power Following Control Strategy Based on an Optimal Efficiency Map for a Hybrid Electric Tracked Vehicle. Energies 2020, 13, 1893. [Google Scholar] [CrossRef]
- Wen, Q.; Wang, F.; Xu, B.; Sun, Z. Improving the Fuel Efficiency of Compact Wheel Loader With a Series Hydraulic Hybrid Powertrain. IEEE Trans. Veh. Technol. 2020, 69, 10700–10709. [Google Scholar] [CrossRef]
- Cunanan, C.; Tran, M.-K.; Lee, Y.; Kwok, S.; Leung, V.; Fowler, M. A Review of Heavy-Duty Vehicle Powertrain Technologies: Diesel Engine Vehicles, Battery Electric Vehicles, and Hydrogen Fuel Cell Electric Vehicles. Clean Technol. 2021, 3, 474–489. [Google Scholar] [CrossRef]
- Mocera, F.; Somà, A. Analysis of a Parallel Hybrid Electric Tractor for Agricultural Applications. Energies 2020, 13, 3055. [Google Scholar] [CrossRef]
- Padovani, D.; Dimitriou, P.; Minav, T. Challenges and solutions for designing Energy-Efficient and Low-Pollutant Machines in Off-Road hydraulics. Energy Convers. Manag. X 2024, 21, 100526. [Google Scholar] [CrossRef]
- Mendes, F.E.G.; Brandao, D.I.; Maia, T.; de Filho, J.C.B. Off-Road Vehicle Hybridization Methodology Applied to a Tractor Backhoe Loader. In Proceedings of the IEEE Transportation Electrification Conference and Expo (ITEC), Detroit, MI, USA, 19–21 June 2019; pp. 1–6. [Google Scholar]
- Do, T.C.; Truong, H.V.A.; Dao, H.V.; Ho, C.M.; To, X.D.; Dang, T.D.; Ahn, K.K. Energy Management Strategy of a PEM Fuel Cell Excavator with a Supercapacitor/Battery Hybrid Power Source. Energies 2019, 12, 4362. [Google Scholar] [CrossRef]
- Wang, D.; Guan, C.; Pan, S.; Zhang, M.; Lin, X. Performance analysis of hydraulic excavator powertrain hybridization. Autom. Constr. 2009, 18, 249–257. [Google Scholar] [CrossRef]
- Vehicle, Cambridge Dictionary. 2023. Available online: https://dictionary.cambridge.org/dictionary/english/vehicle (accessed on 17 December 2023).
- Lajunen, A.; Sainio, P.; Laurila, L.; Pippuri-Mäkeläinen, J.; Tammi, K. Overview of Powertrain Electrification and Future Scenarios for Non-Road Mobile Machinery. Energies 2018, 11, 1184. [Google Scholar] [CrossRef]
- Lajunen, A.; Suomela, J.; Pippuri, J.; Tammi, K.; Lehmuspelto, T.; Sainio, P. Electric and Hybrid Electric Non-Road Mobile Machinery—Present Situation and Future Trends. World Electr. Veh. J. 2016, 8, 172–183. [Google Scholar] [CrossRef]
- Dallmann, T.; Menon, A. Technology Pathways for Diesel Engines Used in Non-Road Vehicles And Equipment; The International Council on Clean Transportation: Washington, DC, USA, 2016. [Google Scholar]
- Equipments, Caterpillar. 2023. Available online: https://www.cat.com/en_US/products/new/equipment.html (accessed on 17 December 2023).
- Olson, E. Engineering 360. How the World’s First Large-Scale Electric Excavator Works. In July 2019. Available online: https://cutt.ly/wbP2Qdq (accessed on 5 May 2021).
- CNHi; Case Construction. CASE Unveils “Project Zeus”—The All-New 580 EV—The Industry’s First Fully Electric Backhoe Loader. 2020. Available online: https://cutt.ly/HbDzkxl (accessed on 30 April 2021).
- Mendes, F.E.G. Electrificação de Máquinas Pesadas Fora de Estrada Baseada no Acionamento Elétrico dos Atuadores e Armazenadores de Energia de Baixa Capacidade. Master’s Thesis, Universidade Federal de Minas Gerais, Minas Gerais, Brazil, 21 November 2019. [Google Scholar]
- Brandao, D.A.d.L.; Ramos, M.d.F.; Parreiras, T.M.; Maia, T.A.C.; Pires, I.A.; Corrêa, T.P.; Cardoso Filho, B.d.J.; Nascimento, A. Hybridization of a Backhoe Loader: Electric Drive System Design. Machines 2023, 11, 471. [Google Scholar] [CrossRef]
- Vukovic, M.; Leifeld, R.; Murrenhoff, H. Reducing Fuel Consumption in Hydraulic Excavators—A Comprehensive Analysis. Energies 2017, 10, 687. [Google Scholar] [CrossRef]
- Taherzadeh, E.; Dabbaghjamanesh, M.; Gitizadeh, M.; Rahideh, A. A New Efficient Fuel Optimization in Blended Charge Depletion/Charge Sustenance Control Strategy for Plug-In Hybrid Electric Vehicles. IEEE Trans. Intell. Veh. 2018, 3, 374–383. [Google Scholar] [CrossRef]
- Brandao, D.A.D.L.; Ramos, M.D.F.; Pires, I.A.; Maia, T.A.; Cardoso Filho, B.D.J. Impact of the Efficiency of Commercial Auxiliary Power Modules on Electric Vehicles. Congr. Bras. Automática 2022, 3, CBA2022. [Google Scholar] [CrossRef]
- Hayes, J.G.; Goodarzi, G.A. Electromobility and the Environment. In Electric Powertrain: Energy Systems, Power Electronics and Drives for Hybrid, Electric and Fuel Cell Vehicles, 1st ed.; John Wiley & Sons: Hoboken, NJ, USA, 2018; pp. 3–40. [Google Scholar]
- Backhoe Loaders Market Development and Its Factors Analysis-Product/Industry News-Xiamen LTMG Co., Ltd. Available online: https://www.ltmg-loader.com/news/industry-news/547.html (accessed on 28 November 2023).
- Hydraulic Gear Pumps and Motors. Available online: https://www.casappa.com/en/c/downloads/category/2/ (accessed on 30 August 2021).
- Vehicle and Fuel Emissions Testing—Dynamometer Drive Schedules. United States Environmental Protection Agency, EPA. Available online: https://www.epa.gov/vehicle-and-fuel-emissions-testing/dynamometer-drive-schedules/ (accessed on 6 November 2023).
- Us Epa, O. EPA Nonregulatory Nonroad Duty Cycles. 2017. Available online: https://www.epa.gov/moves/epa-nonregulatory-nonroad-duty-cycles (accessed on 5 February 2024).
- Yuan, Q. Real World Duty Cycle Development Method for Non-road Mobile Machinery (NRMM). SAE Int. J. Commer. Veh. 2016, 9, 306–312. [Google Scholar] [CrossRef]
- Mi, C.; Masrur, M.A.; Gao, D.W. Modeling and Simulation of Electric and Hybrid Vehicles. In Hybrid Electric Vehicles; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2011; pp. 363–384. [Google Scholar] [CrossRef]
- Kulikov, I.; Kozlov, A.; Terenchenko, A.; Karpukhin, K. Comparative Study of Powertrain Hybridization for Heavy-Duty Vehicles Equipped with Diesel and Gas Engines. Energies 2020, 13, 2072. [Google Scholar] [CrossRef]
- Goswami, G.; Tupitsina, A.; Jaiswal, S.; Nutakor, C.; Lindh, T.; Sopanen, J. Comparison of Various Hybrid Electric Powertrains for Non-Road Mobile Machinery Using Real-Time Multibody Simulation. IEEE Access 2022, 10, 107631–107648. [Google Scholar] [CrossRef]
- EMRAX. Emrax E-Motors: 228 (124 kW | 230 Nm), n.d. Available online: https://emrax.com/e-motors/emrax-228/ (accessed on 5 February 2023).
- Estimation Equivalent Circuit Battery. MathWorks Help Center. Available online: https://www.mathworks.com/help/autoblks/ref/estimationequivalentcircuitbattery.html?s_tid=srchtitle_site_search_1_estimation%20equivalent%20circuit%20battery (accessed on 28 November 2023).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Machinery Type | Hybrid Topology | Implements Hybridization | ICE Maps | Electric Machines Maps | Fuel Comsumption | Experimental Validation |
|---|---|---|---|---|---|---|---|
| [5] | Tractor | Full Electric | ✗ | ✗ | ✗ | ✗ | ✗ |
| [7] | Snowblower | Series | ✓ | ✓ | ✓ | ✓ | ✗ |
| [8] | Tractor | Series | ✗ | ✓ | ✓ | ✓ | ✗ |
| [23] | Excavator | Series/Parallel | ✓ | ✓ | ✓ | ✓ | ✗ |
| [9] | Wheel Loader | Series–Parallel | ✗ | ✓ | ✗ | ✓ | ✗ |
| [12] | Tractor | Series | ✗ | ✗ | ✗ | ✓ | ✗ |
| [13] | Excavator | Parallel | ✗ | ✓ | ✓ | ✓ | ✗ |
| [14] | Tractor | Series–Parallel | ✗ | ✓ | ✗ | ✓ | ✗ |
| [15] | Chisel plough | Parallel | ✗ | ✗ | ✗ | ✗ | ✗ |
| [16] | Bulldozer | Series | ✗ | ✓ | ✓ | ✓ | ✗ |
| [17] | Wheel Loader | Series | ✗ | ✓ | ✗ | ✓ | ✗ |
| [19] | Tractor | Parallel | ✗ | ✗ | ✗ | ✓ | ✓ |
| [21] | Backhoe Loader | Series | ✓ | ✓ | ✗ | ✓ | ✗ |
| [22] | Excavator | Series a | ✓ | - | ✗ | ✗ | ✗ |
| Here | Backhoe Loader | Series | ✓ | ✓ | ✓ | ✓ | ✓ |
| Agriculture and Forestry | Construction | Railway | Mines and Quarrying | Gardening and Handheld Equipment |
|---|---|---|---|---|
| Harvesters Cultivators Tractors All-terrain vehicles | Excavators Loaders Bulldozers Forklifts Backhoe Loaders Cranes | Locomotives Rail-cars | Underground trucks Mining loaders Excavators | Lawnmowers Chain saws Hedge trimmers |
| Power (kW) | Classification | Abbreviation |
|---|---|---|
| From 09 to 30 | Mini | Mi |
| From 30 to 90 | Compact | C |
| From 90 to 150 | Small | S |
| From 150 to 310 | Medium | M |
| From 310 to 1200 | Large | L |
| Above 1200 | Extra-Large | EL |
| NRMM | Power (kW) | Classification | |
|---|---|---|---|
| Min. | Max. | ||
| Utility vehicles | 18.00 | 37.28 | Mi and C |
| Compact skid steer loader and compact track loader | 50.10 | 82.00 | C |
| Backhoe Loader | 51.00 | 98.00 | C and S |
| Telescopic handlers | 75.00 | 106.00 | C and S |
| Underground mining load-haul-dump loaders | 123.00 | 305.00 | S and M |
| Motor graders | 104.00 | 399.00 | S, M and L |
| Excavators | 9.60 | 404.00 | Mi, C, S, M, and L |
| Loaders | 31.00 | 1297.00 | C, S, M, L and EL |
| Equipment | Parameters | Values |
|---|---|---|
| ICE | Cylinders Displacement (L) Gross Power (kW) Gross Torque (Nm) Rated speed (RPM) | 4 4.5 72 420 2200 |
| Hydraulic pump | Nominal Capacity @ 2200 RPM Max pressure (bar) Gear pump (cc/ev) Efficiency (\eta_t) | 145 L/min 200 35.427 85% |
| Operation | System | Usage (%) |
|---|---|---|
| Backhoe trenching | Rear hydraulic system | 55–60 |
| Backhoe basement excavation | Rear hydraulic system | |
| Loader stockpile | Front hydraulics and traction | 10–15 |
| Roading | Traction system | 5–10 |
| Cell Type | Li-Ion |
|---|---|
| Modules in series | 4 |
| Nominal capacity | 20.4 kWh |
| Nominal voltage | 88.8 V |
| Nominal current | 233 A |
| Maximum discharge power (3 s) | 120 kW |
| Continuous discharge power | 20 kW |
| Maximum power charge (10 min) | 32 kW |
| Continuous charge power | 20 kW |
| Dimensions | 0.68 × 0.30 × 0.32 m |
| Volume | 65.3 L |
| Machine Architecture | Fuel Consumption [kg] | Difference (%) |
|---|---|---|
| Combustion—theoretical data | 4.32 | - |
| Combustion—experimental data | 4.22 | - |
| Hybrid—theoretical data | 3.37 | −21.99 |
| Hybrid—experimental data | 2.82 | −33.18 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ramos, M.d.F.; Brandao, D.A.d.L.; Galo, D.P.V.; Cardoso Filho, B.d.J.; Pires, I.A.; Maia, T.A.C. A Study on the Performance of the Electrification of Hydraulic Implements in a Compact Non-Road Mobile Machine: A Case Applied to a Backhoe Loader. World Electr. Veh. J. 2024, 15, 127. https://doi.org/10.3390/wevj15040127
Ramos MdF, Brandao DAdL, Galo DPV, Cardoso Filho BdJ, Pires IA, Maia TAC. A Study on the Performance of the Electrification of Hydraulic Implements in a Compact Non-Road Mobile Machine: A Case Applied to a Backhoe Loader. World Electric Vehicle Journal. 2024; 15(4):127. https://doi.org/10.3390/wevj15040127
Chicago/Turabian StyleRamos, Mariana de F., Dener A. de L. Brandao, Diogo P. V. Galo, Braz de J. Cardoso Filho, Igor A. Pires, and Thales A. C. Maia. 2024. "A Study on the Performance of the Electrification of Hydraulic Implements in a Compact Non-Road Mobile Machine: A Case Applied to a Backhoe Loader" World Electric Vehicle Journal 15, no. 4: 127. https://doi.org/10.3390/wevj15040127
APA StyleRamos, M. d. F., Brandao, D. A. d. L., Galo, D. P. V., Cardoso Filho, B. d. J., Pires, I. A., & Maia, T. A. C. (2024). A Study on the Performance of the Electrification of Hydraulic Implements in a Compact Non-Road Mobile Machine: A Case Applied to a Backhoe Loader. World Electric Vehicle Journal, 15(4), 127. https://doi.org/10.3390/wevj15040127