
MLD Modeling and MPC-Based Energy Management Strategy for Hydrogen Fuel Cell/Supercapacitor Hybrid Electric Vehicles


Abstract
1. Introduction
2. Fuel Cell Hybrid Vehicle Model
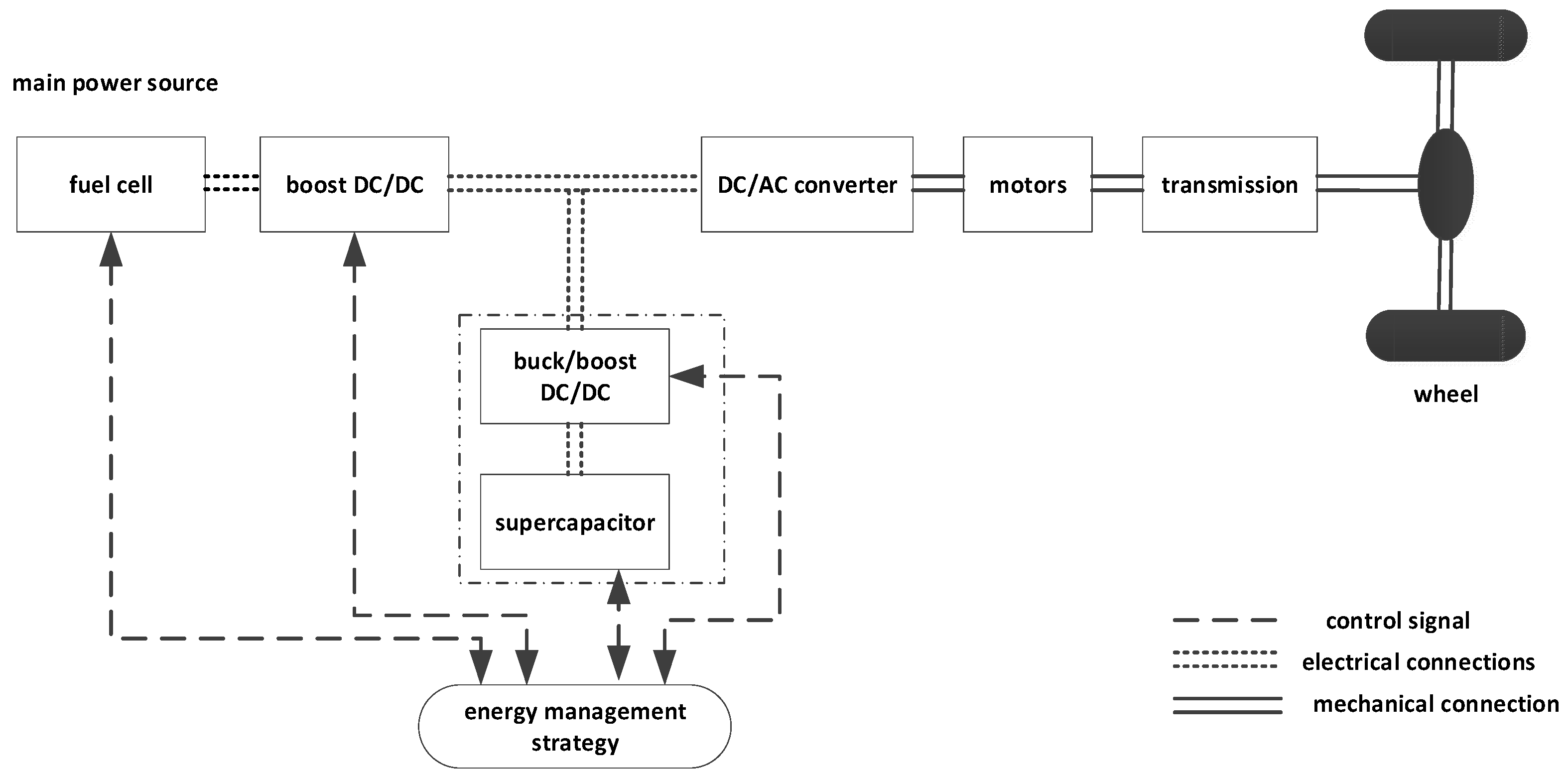
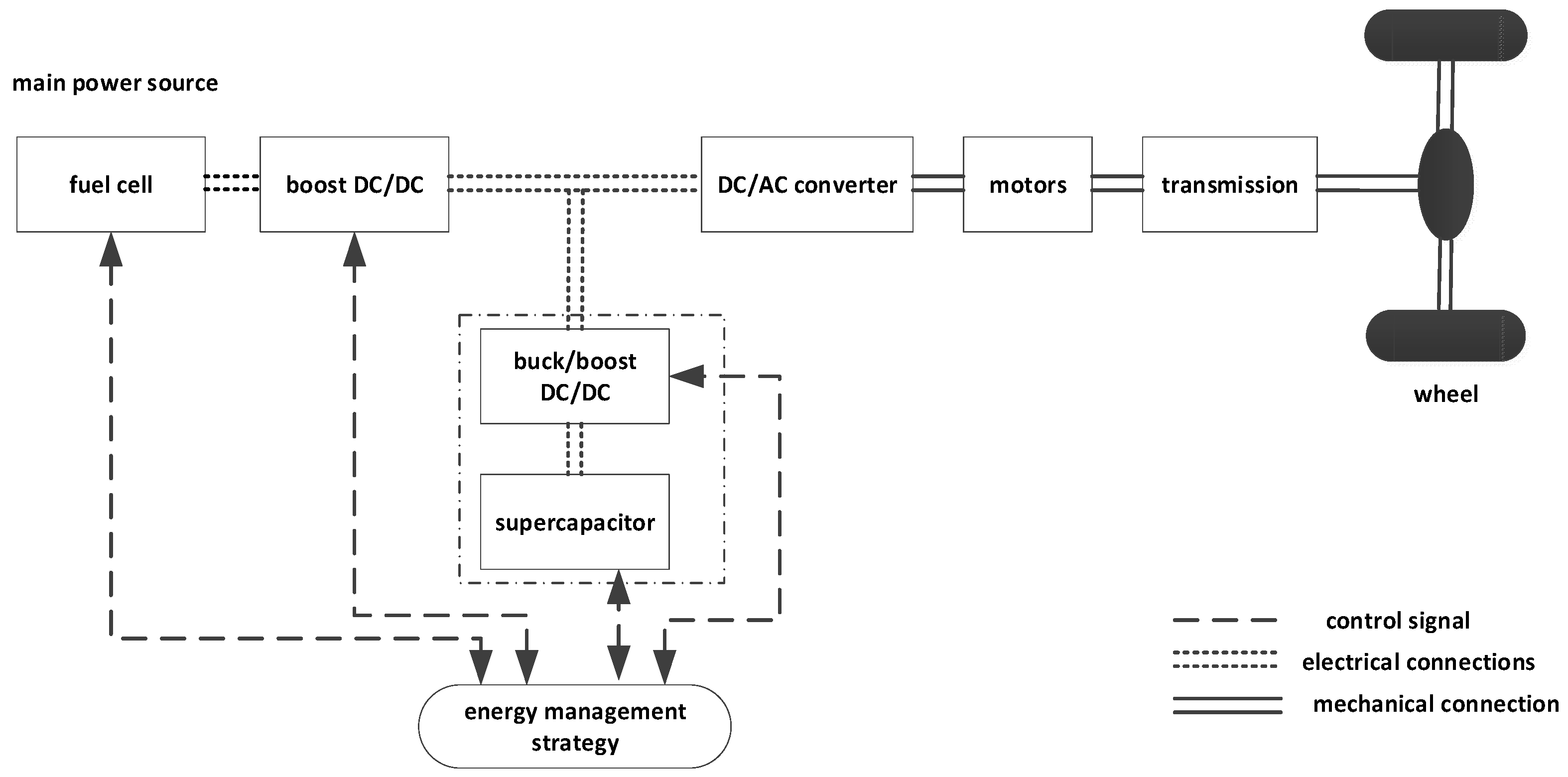
2.1. Fuel Cell Hybrid Powertrain Architecture
2.2. Fuel Cell Model
2.3. Supercapacitor Model
2.4. DC/DC Model
2.5. Vehicle Dynamic Model
3. MLD Modeling of Fuel Cell Hybrid Powertrain
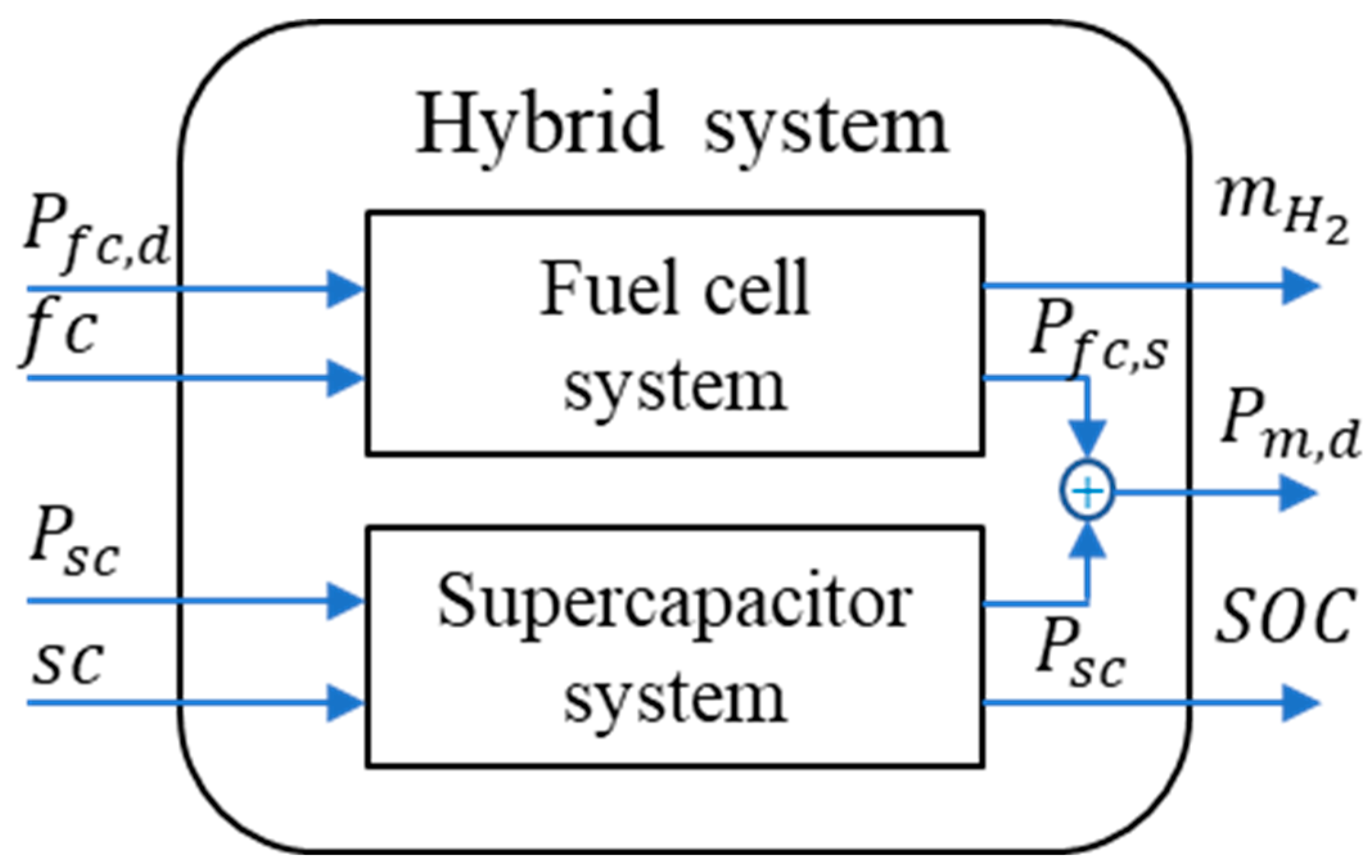
3.1. MLD Model Architecture of FCHPS
3.2. Hysdel-Based MLD Model Construction
- 1.
- Definition of all variables in the system
- 2.
- Definition of system auxiliary variables
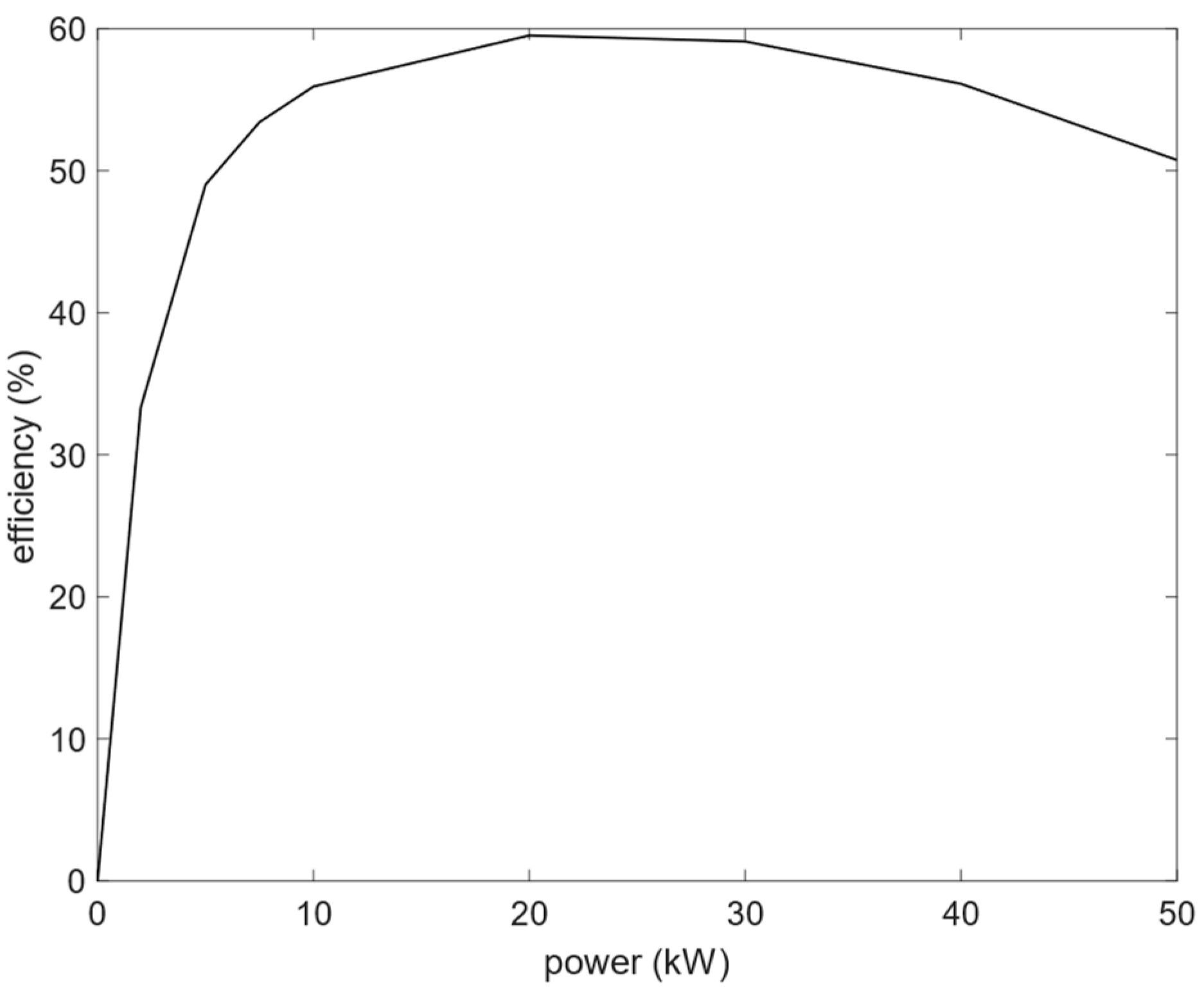
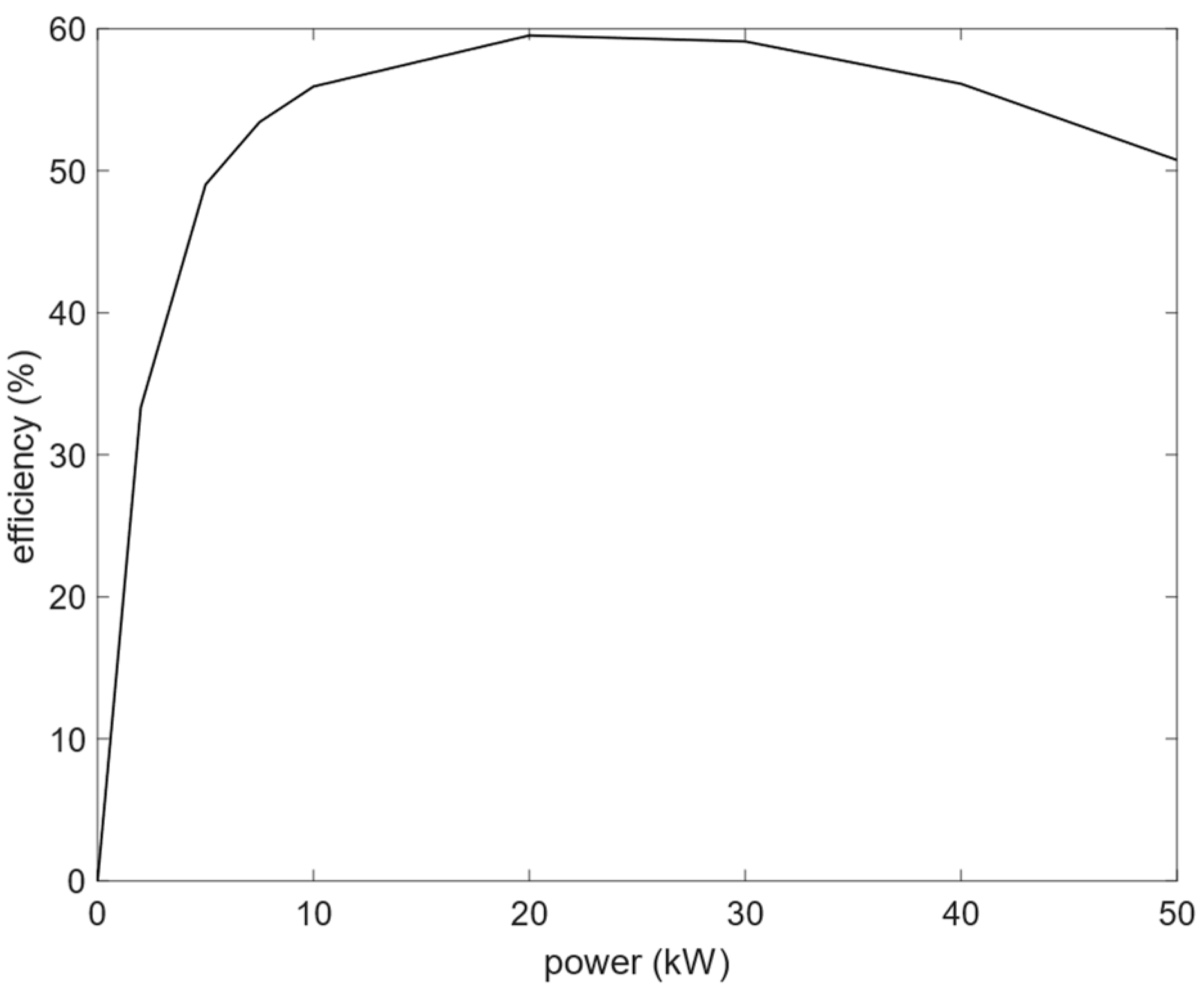
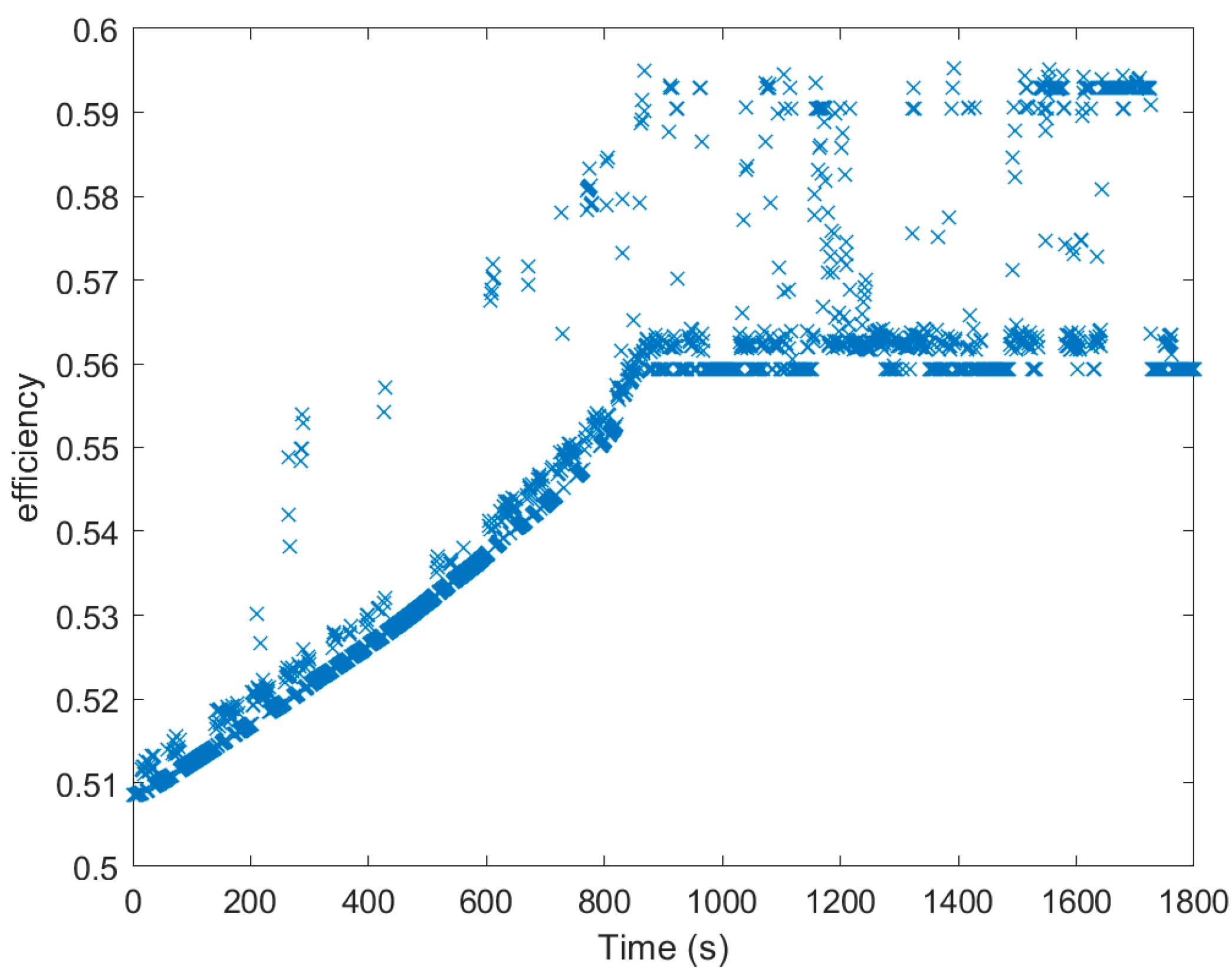
- The corresponding auxiliary discrete variables are set according to the threshold value of the FC (i.e., the FC high-efficiency region in Figure 2) and the magnitude of the discharge time, as follows:
- The auxiliary discrete variables are set according to the charge state and the discharge time magnitude of the supercapacitor, as follows:
- 3.
- System operation constraints
4. Energy Management Strategy Based on MLD-MPC
4.1. Evaluation Indicators for Energy Management Strategies
4.1.1. Equivalent Hydrogen Consumption Model
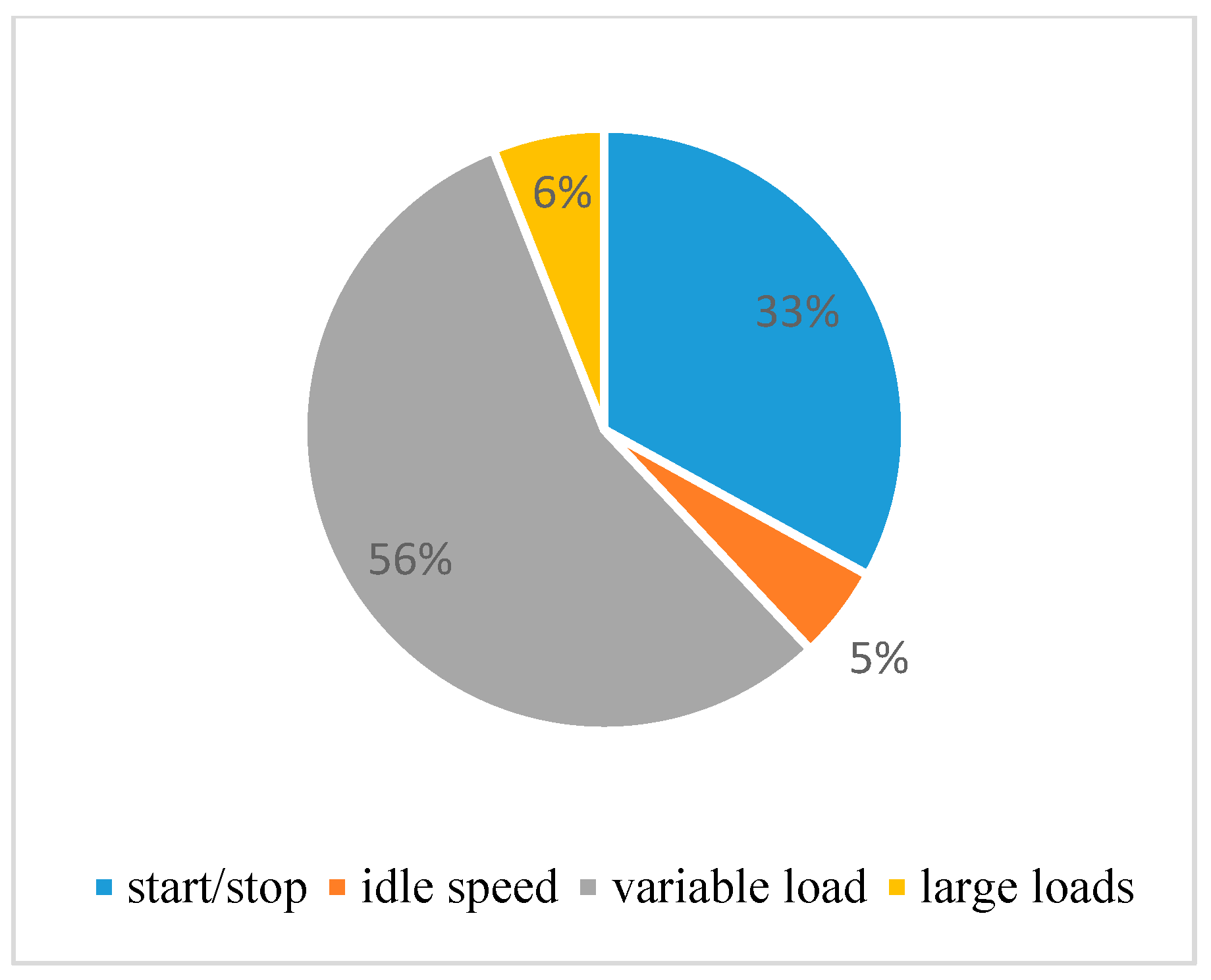
4.1.2. Degradation Model of FC
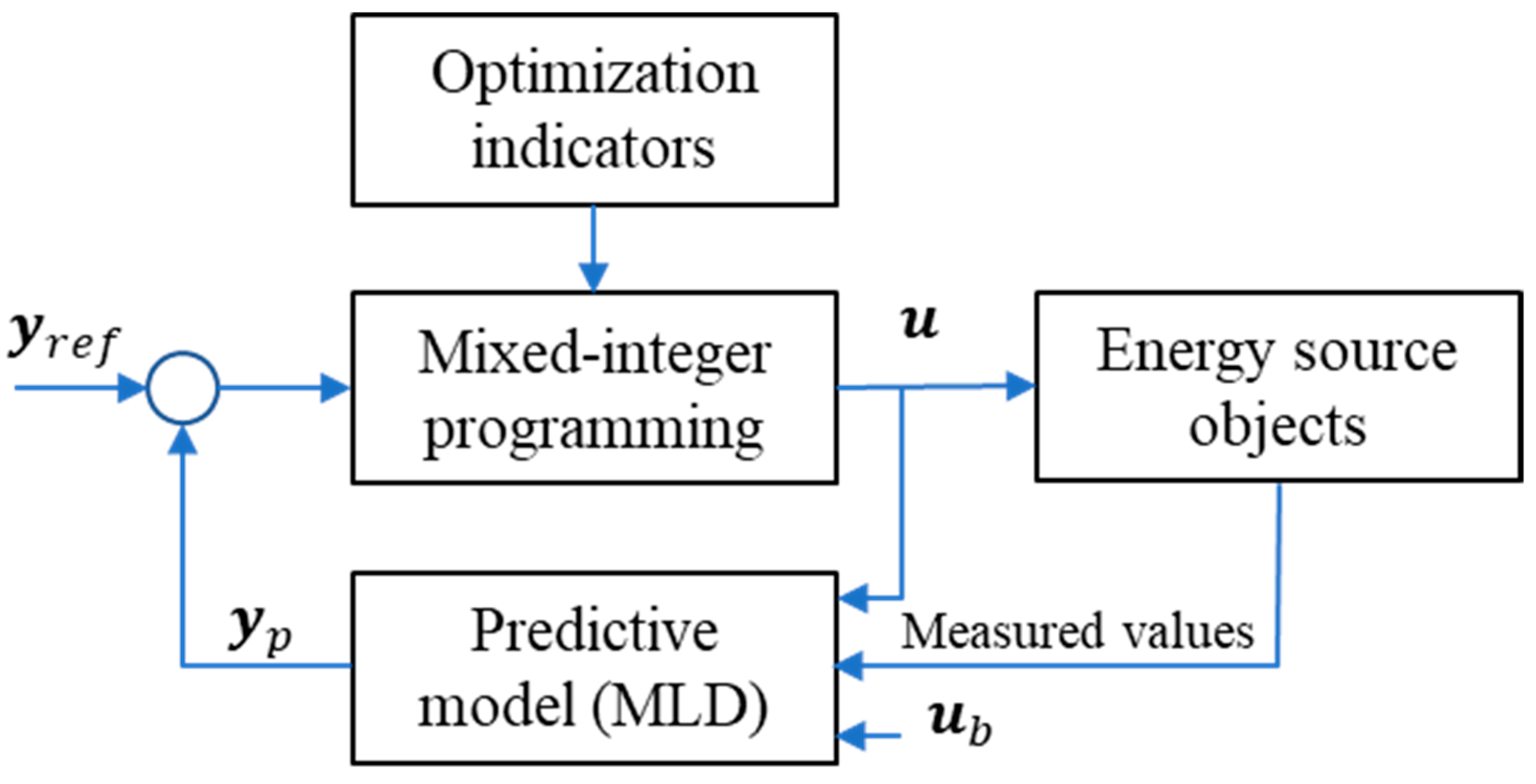
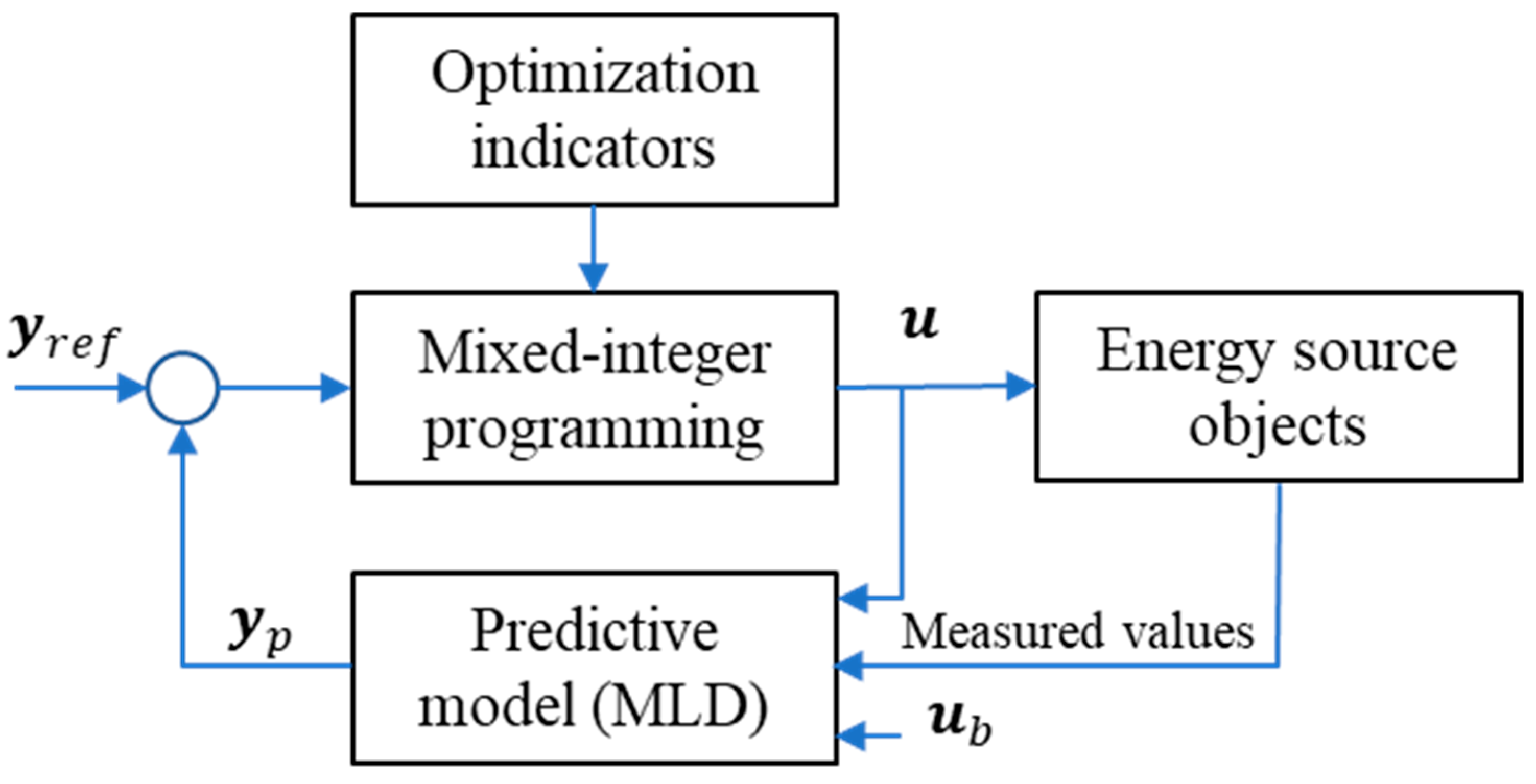
4.2. Energy Control Based on MLD-MPC
5. Simulation Test and Results Analysis
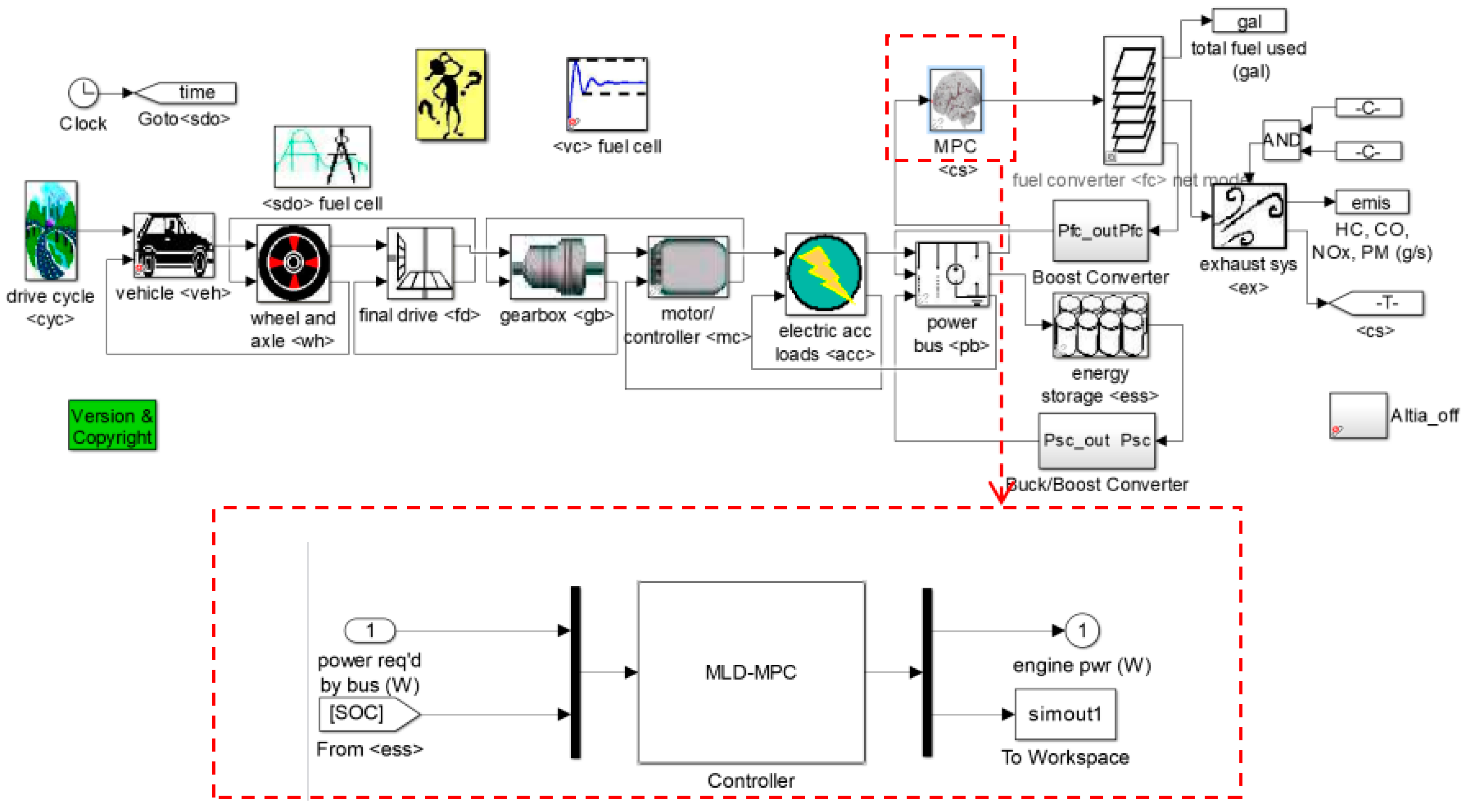
5.1. Simulation Model Construction
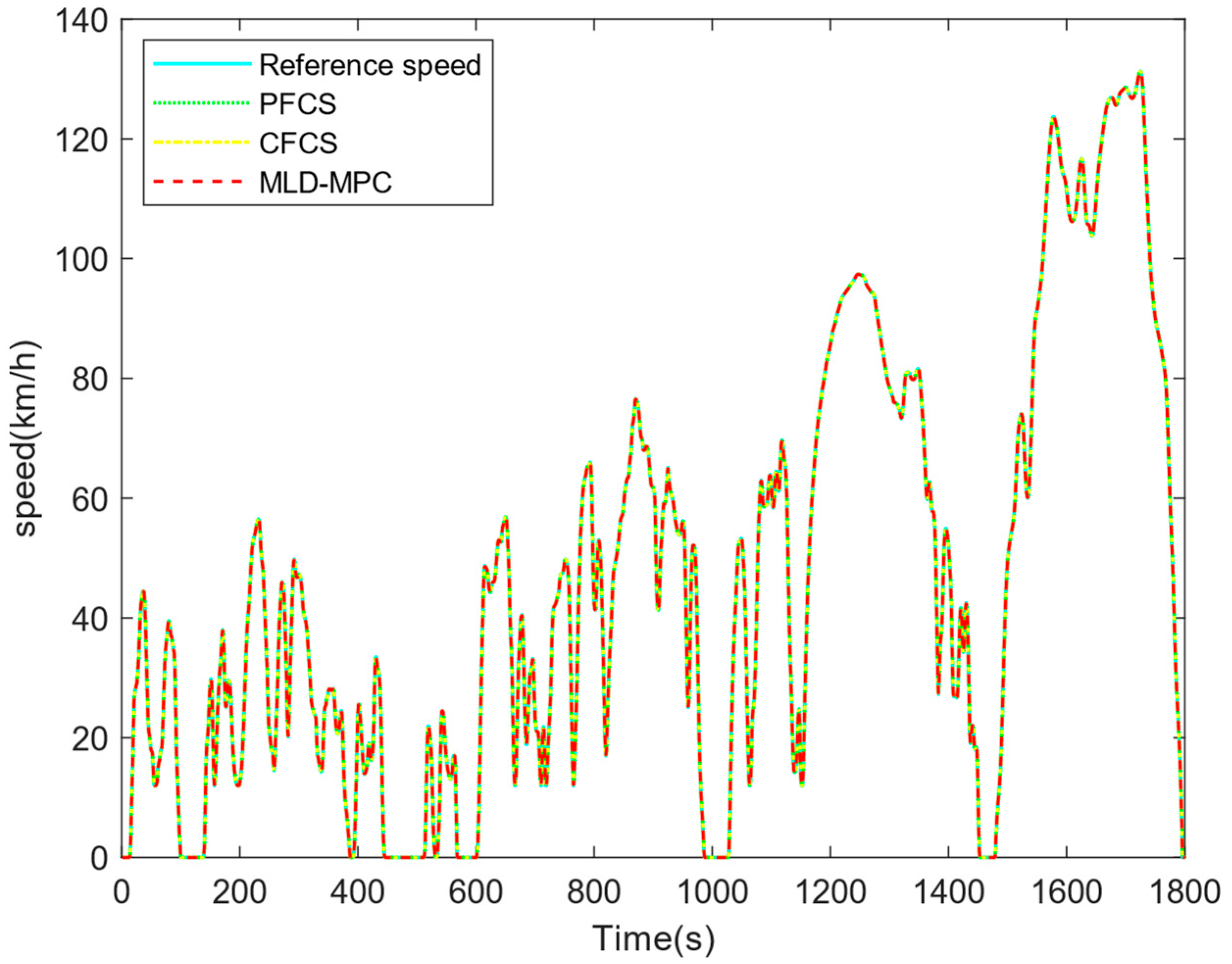
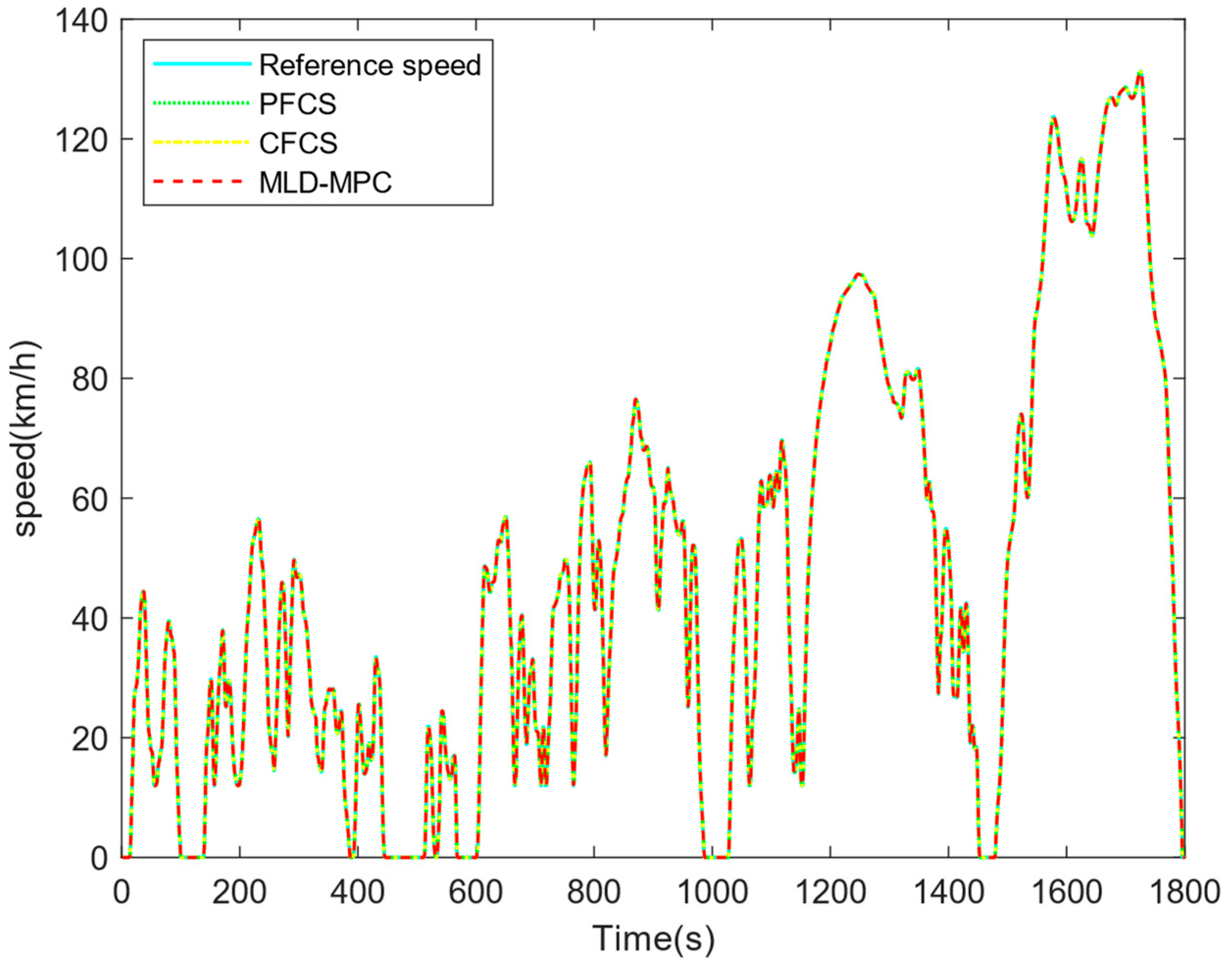
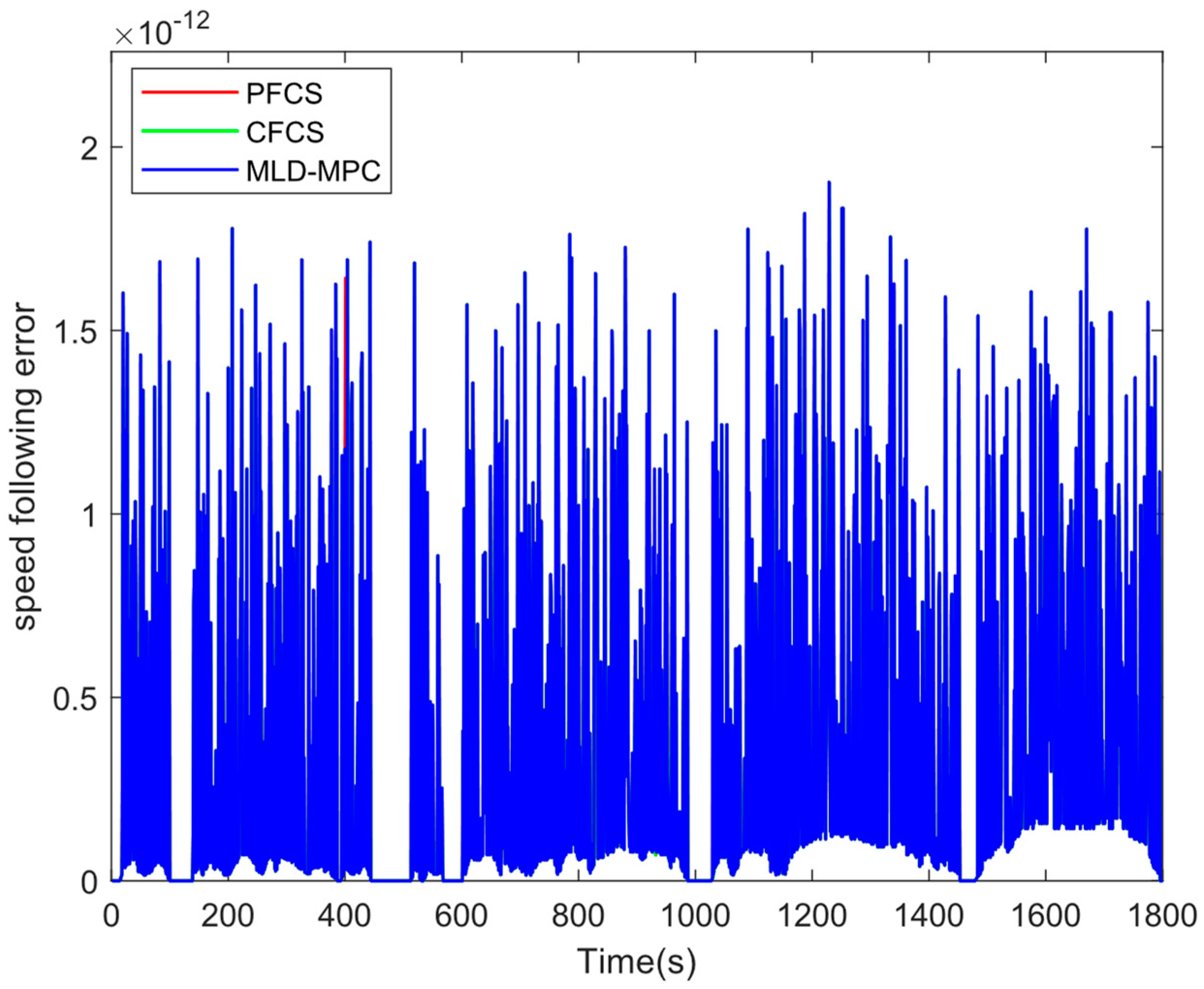
5.2. Dynamic Validation of Control Strategies
5.3. Analysis of Simulation Results
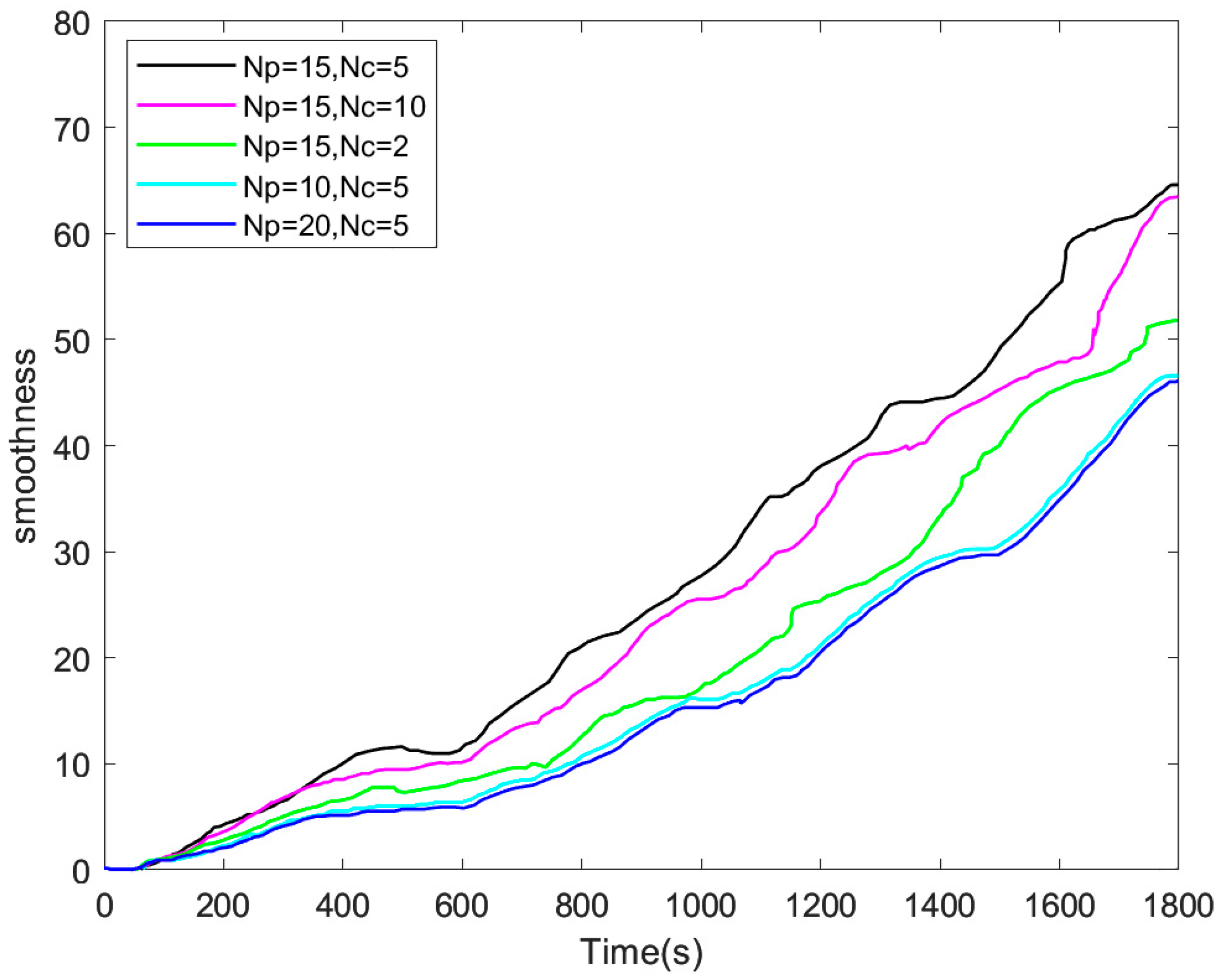
5.3.1. Parameter Selection for the Control Strategy
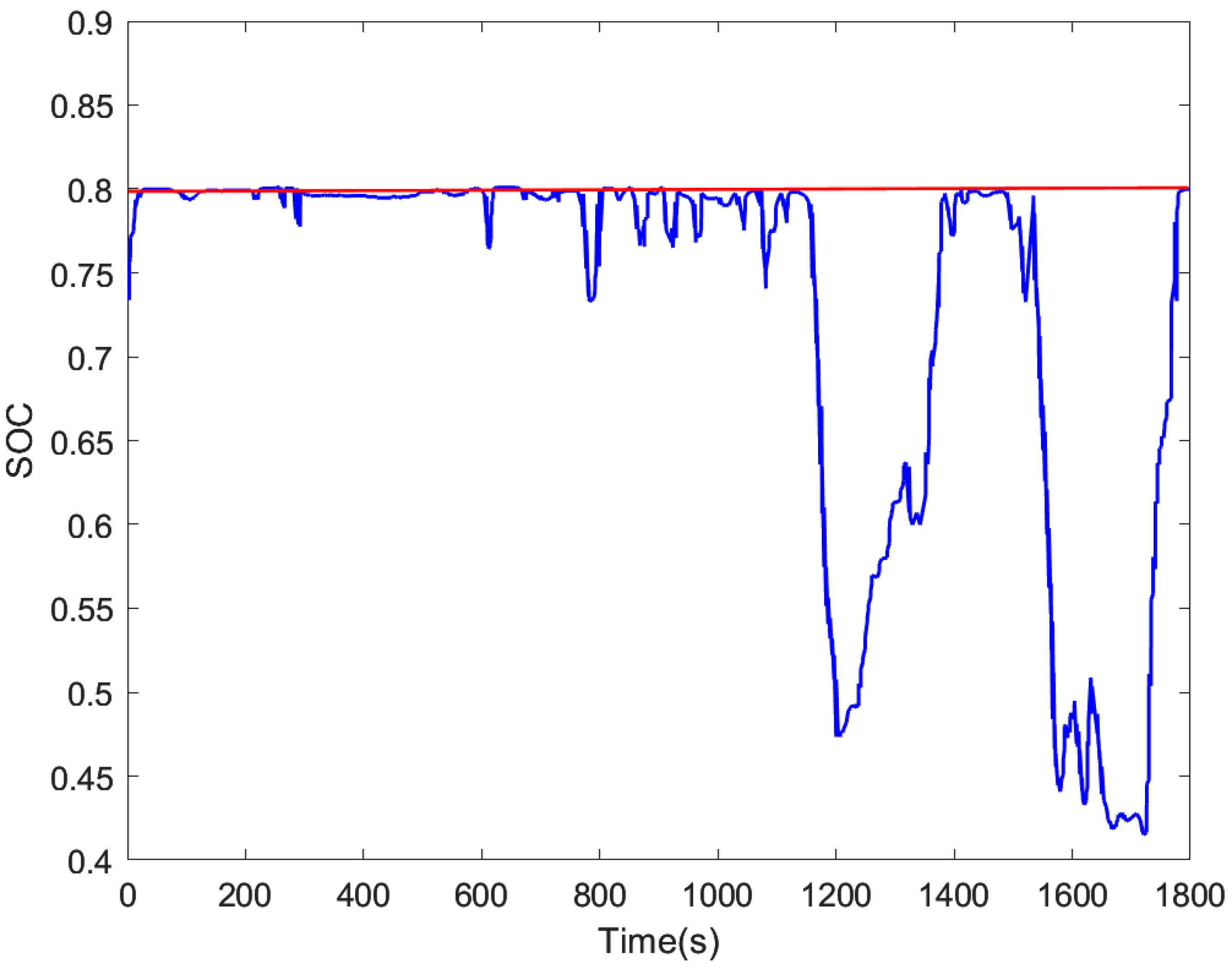
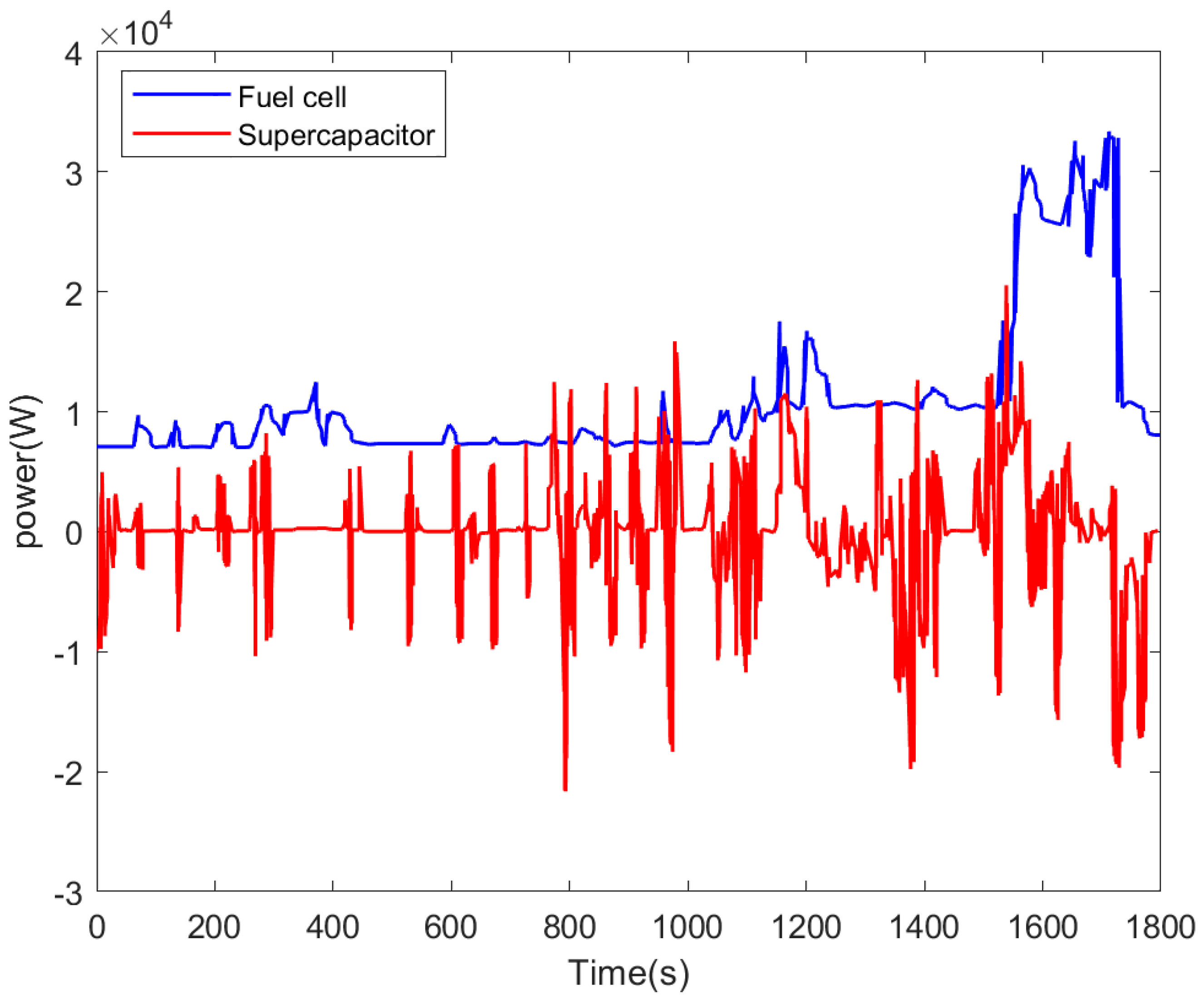
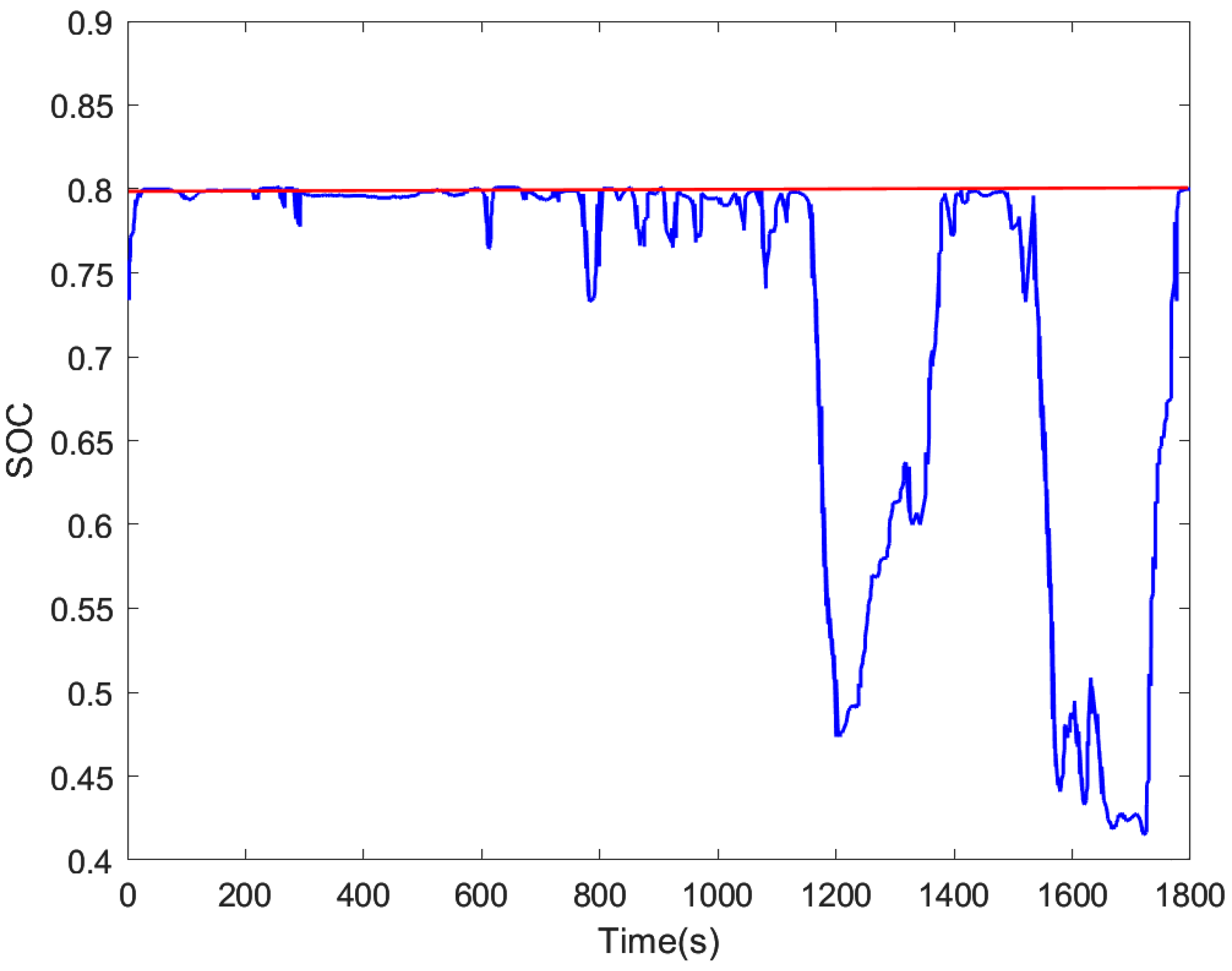
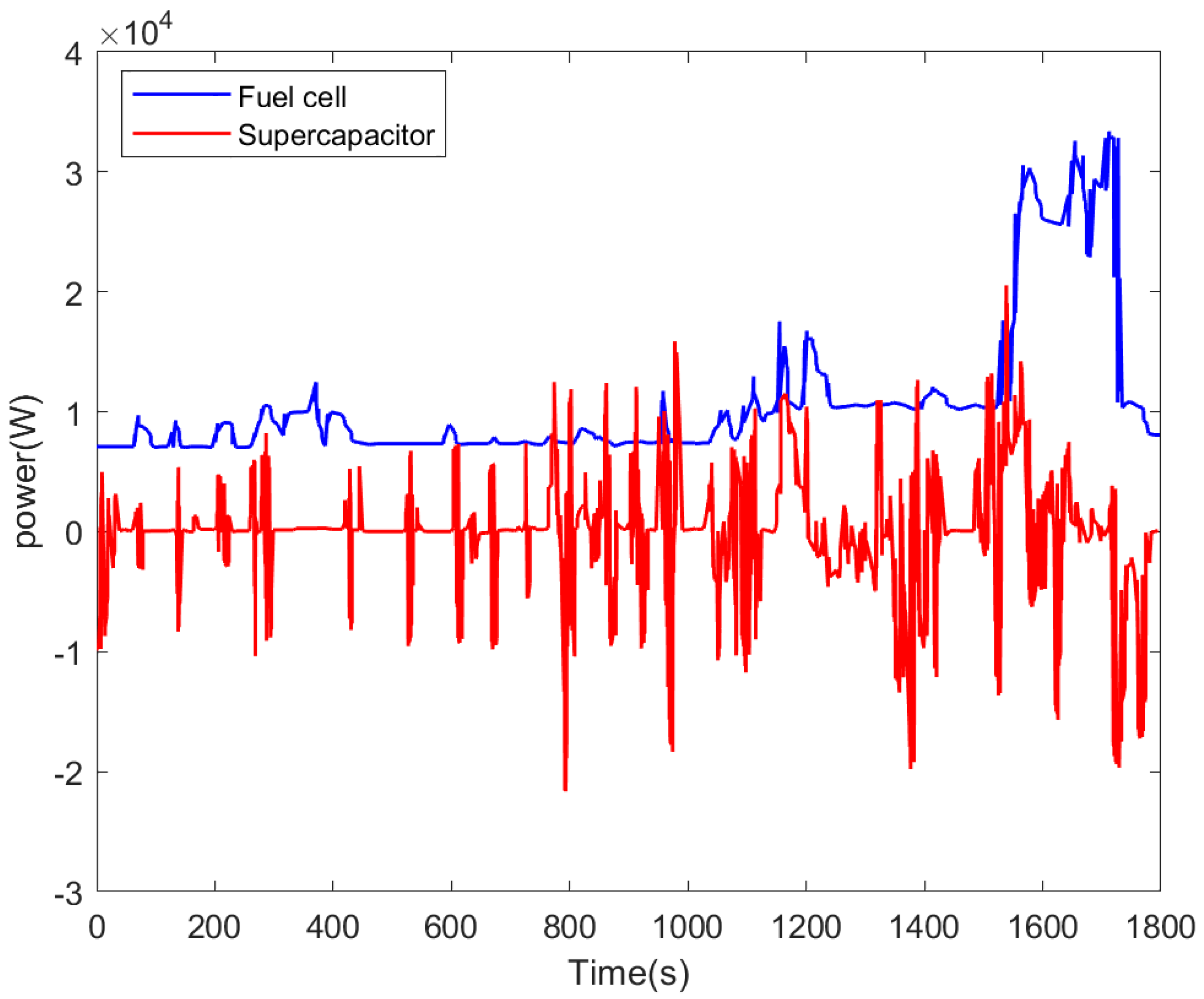
5.3.2. Results and Analysis
6. Conclusions
- The Hysdel language is utilized to establish the MLD model of the FCHPS. Based on the mathematical modeling of the key components of the FCHPS, such as the FC, supercapacitor, DC/DC converters, and motor, the characteristics of different regions are described by the segment linearization method; the logic variables are used to organically link the different operating modes of the FCHPS with the constraints, logic rules, quantitative information, and charging/discharging operating modes of the segment linearization intervals, which are transformed into hybrid-integer linear inequalities. The inequalities are combined with the kinetic equations of each key component to establish the MLD model. The modeling problem for a complex hybrid system like the FCHPS is solved.
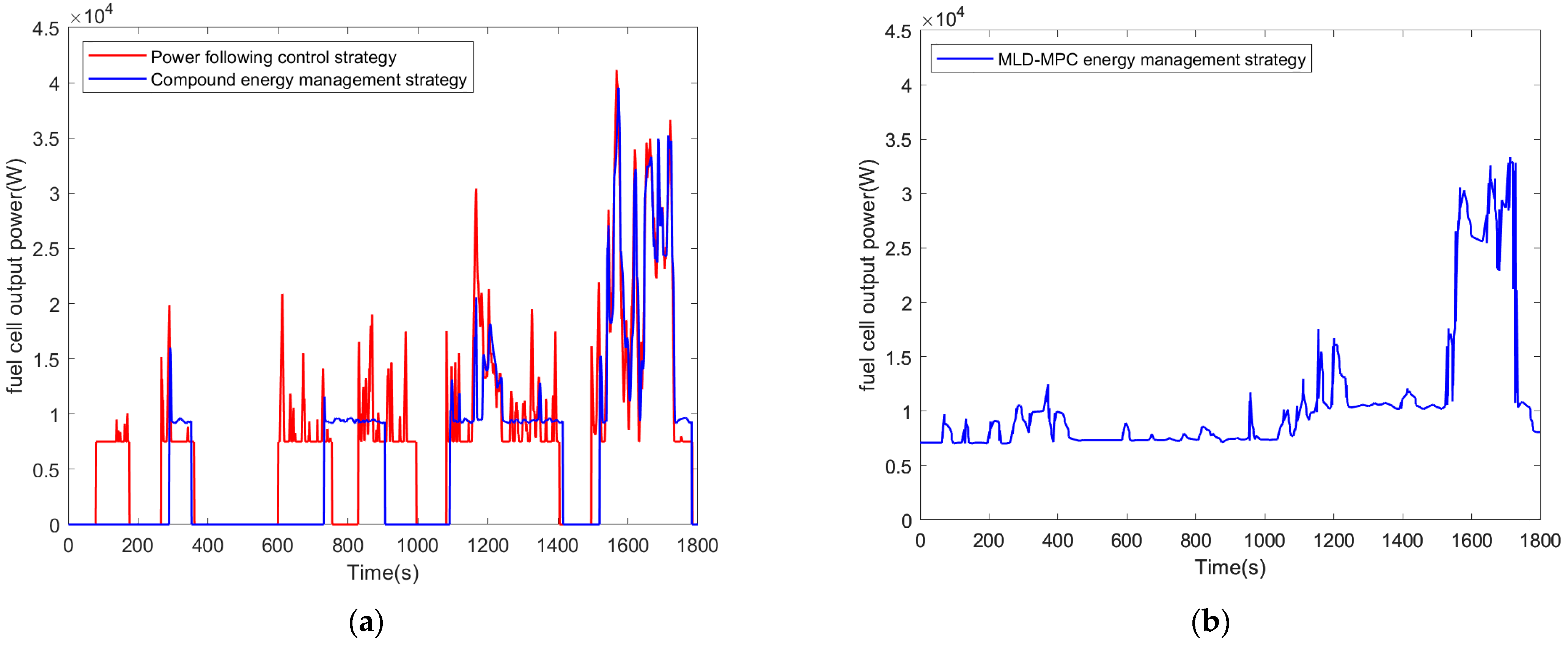
- The MLD-MPC energy management strategy for FCHEVs is established. Using the MLD model as a prediction model and the equivalent hydrogen consumption and the performance degradation of the FC as the optimization performance indexes, the economy of the FCHEV as well as the durability of the FC are improved and the real-time control of energy is achieved by rolling optimization of the operating states of the FC and the supercapacitor in the optimized finite time domain.
- Simulation verification under the WLTC shows that the hydrogen consumption of 100 km under the MLD-MPC energy management strategy proposed in this paper is 44.6 , which is 10.98% and 1.98% lower than the two types of real-time control strategies, PFCS and CFCS, respectively; and the number of start/stop times of the FC under the proposed strategy is reduced by six times and four times, respectively. So, the strategy in this paper has better economy and FC durability while achieving optimized real-time control.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- World Energy Outlook 2021; International Energy Agency: Paris, France, 2021.
- Djerioui, A.; Houari, A.; Zeghlache, S.; Saim, A.; Benkhoris, M.F.; Mesbahi, T.; Machmoum, M. Energy management strategy of supercapacitor/fuel cell energy storage devices for vehicle applications. Int. J. Hydrogen Energy 2019, 44, 23416–23428. [Google Scholar] [CrossRef]
- Lü, X.; Wu, Y.; Lian, J.; Zhang, Y.; Chen, C.; Wang, P.; Meng, L. Energy management of hybrid electric vehicles: A review of energy optimization of fuel cell hybrid power system based on genetic algorithm. Energy Convers. Manag. 2020, 205, 112474. [Google Scholar] [CrossRef]
- Chen, W.R.; Li, J.C.; Li, Q. Power following control strategy for SOC dynamic regulation of fuel cell small vehicles. J. Southwest Jiaotong Univ. 2021, 56, 197–205. [Google Scholar]
- Li, D.; Xu, B.; Tian, J.; Ma, Z. Energy management strategy for fuel cell and battery hybrid vehicle based on fuzzy logic. Processes 2020, 8, 882. [Google Scholar] [CrossRef]
- Zhou, W.; Yang, L.; Cai, Y.; Ying, T. Dynamic programming for new energy vehicles based on their work modes Part II: Fuel cell electric vehicles. J. Power Sources 2018, 407, 92–104. [Google Scholar] [CrossRef]
- Sorlei, I.S.; Bizon, N.; Thounthong, P.; Varlam, M.; Carcadea, E.; Culcer, M.; Iliescu, M.; Raceanu, M. Fuel Cell Electric Vehicles—A Brief Review of Current Topologies and Energy Management Strategies. Energies 2021, 14, 252. [Google Scholar] [CrossRef]
- Li, X.; Wang, Y.; Yang, D.; Chen, Z. Adaptive Energy Management Strategy for Fuel Cell/Battery Hybrid Vehicles using Pontryagin’s Minimal Principle. J. Power Sources 2019, 440, 227105. [Google Scholar] [CrossRef]
- Meng, X.; Li, Q.; Chen, W.R.; Zhang, G.R. A hierarchical energy management method for fuel cell hybrid power systems based on the Pontryagin Minimum Principle for satisfactory optimization. Chin. J. Electr. Eng. 2019, 39, 782–792+957. [Google Scholar]
- Tribioli, L.; Cozzolino, R.; Chiappini, D.; Iora, P. Energy management of a plug-in fuel cell/battery hybrid vehicle with on-board fuel processing. Appl. Energy 2016, 184, 140–154. [Google Scholar] [CrossRef]
- Wang, Z.; Xie, Y.; Zang, P.; Wang, Y. Energy management strategy for fuel cell buses based on the principle of minimal value. J. Jilin Univ. (Eng. Ed.) 2020, 50, 36–43. [Google Scholar]
- Zhang, F.; Hu, X.; Xu, K. Status and prospects of research on model predictive energy management for hybrid vehicles. J. Mech. Eng. 2019, 55, 86–108. [Google Scholar] [CrossRef]
- Vahidi, A.; Stefanopoulou, A.; Peng, H. Current management in a hybrid fuel cell power system: A model-predictive control approach. IEEE Trans. Control Syst. Technol. 2006, 14, 1047–1057. [Google Scholar] [CrossRef]
- Carignano, M.G.; Costa-Castelló, R.; Roda, V.; Nigro, N.M.; Junco, S.; Feroldi, D. Energy management strategy for fuel cell-supercapacitor hybrid vehicles based on prediction of energy demand. J. Power Sources 2017, 360, 419–433. [Google Scholar] [CrossRef]
- Zhao, Z.; Shen, P.; Jia, Y.; Zhou, L. Model predictive real-time optimal control for fuel cell car. J. Tongji Univ. (Nat. Sci.) 2018, 46, 648–657. [Google Scholar]
- Bambang, R.T.; Rohman, A.S.; Dronkers, C.J.; Ortega, R.; Sasongko, A. Energy management of fuel cell/battery/supercapacitor hybrid power sources using model predictive control. IEEE Trans. Ind. Inform. 2014, 10, 1992–2002. [Google Scholar]
- Li, T.; Liu, H.; Wang, H.; Yao, Y. Hierarchical predictive control-based economic energy management for fuel cell hybrid construction vehicles. Energy 2020, 198, 117327. [Google Scholar] [CrossRef]
- Zhou, Y.; Li, H.; Ravey, A.; Péra, M.C. An integrated predictive energy management for light-duty range-extended plug-in fuel cell electric vehicle. J. Power Sources 2020, 451, 227780. [Google Scholar] [CrossRef]
- Zhou, Y.; Ravey, A.; Péra, M.C. Real-time cost-minimization power-allocating strategy via model predictive control for fuel cell hybrid electric vehicles. Energy Convers. Manag. 2021, 229, 113721. [Google Scholar] [CrossRef]
- Shen, D.; Lim, C.C.; Shi, P. Robust fuzzy model predictive control for energy management systems in fuel cell vehicles. Control Eng. Pract. 2020, 98, 104364. [Google Scholar] [CrossRef]
- Pereira, D.F.; Lopes, F.; Watanabe, E.H. Nonlinear model predictive control for the energy management of fuel cell hybrid electric vehicles in real-time. IEEE Trans. Ind. Electron. 2020, 68, 3213–3223. [Google Scholar] [CrossRef]
- Yue, M.; Jemei, S.; Gouriveau, R.; Zerhouni, N. Review on health-conscious energy management strategies for fuel cell hybrid electric vehicles: Degradation models and strategies. Int. J. Hydrogen Energy 2019, 44, 6844–6861. [Google Scholar] [CrossRef]
- Zhang, Y. Research on Modeling and Control Methods for Hybrid Systems. Master’s thesis, North China Electric Power University, Baoding, China, 2008.
- Li, J.F.; Tang, T.H.; Yao, G. Modeling and energy-saving control of common DC bus AC drive systems based on hybrid Petri networks. Power Syst. Prot. Control 2011, 39, 1–6. [Google Scholar]
- Li, X.; Xu, J.Q. Modeling and control of bidirectional ICPT systems based on hybrid automata. Power Autom. Equip. 2022, 42, 107–113. [Google Scholar]
- Sun, X.; Wu, P.; Cai, Y.; Wang, S.; Chen, L. Piecewise affine modeling and hybrid optimal control of intelligent vehicle longitudinal dynamics for velocity regulation. Mech. Syst. Signal Process. 2022, 162, 108089. [Google Scholar] [CrossRef]
- Chen, J.; Lin, C.; Liang, S. Mixed logical dynamical model-based MPC for yaw stability control of distributed drive electric vehicles. Energy Procedia 2019, 158, 2518–2523. [Google Scholar] [CrossRef]
- Lian, J.; Liu, S.; Li, L.; Liu, X.; Zhou, Y.; Yang, F.; Yuan, L. A Mixed Logical Dynamical-Model Predictive Control (MLD-MPC) Energy Management Control Strategy for Plug-in Hybrid Electric Vehicles (PHEVs). Energies 2017, 10, 74. [Google Scholar] [CrossRef]
- Jiang, K.; Guo, S.H.; Wu, Q.H. Matching and optimization of power system parameters for fuel cell sightseeing vehicles. Sci. Technol. Eng. 2019, 19, 351–356. [Google Scholar]
- Arce, A.; del Real, A.J.; Bordons, C. MPC for battery/fuel cell hybrid vehicles including fuel cell dynamics and battery performance improvement. J. Process Control. 2009, 19, 1289–1304. [Google Scholar] [CrossRef]
- Zhang, R.; Tao, J.; Zhou, H. Fuzzy Optimal Energy Management for Fuel Cell and Supercapacitor Systems Using Neural Network Based Driving Pattern Recognition. IEEE Trans. Fuzzy Syst. 2018, 27, 45–57. [Google Scholar] [CrossRef]
- Bemporad, A.; Morari, M. Control of systems integrating logic, dynamics, and constraints. Automatica 1999, 35, 407–427. [Google Scholar] [CrossRef]
- Chan, C.C.; Bouscayrol, A.; Chen, K. Electric, hybrid, and fuel-cell vehicles: Architectures and modeling. IEEE Trans. Veh. Technol. 2010, 59, 589–598. [Google Scholar] [CrossRef]
- Pei, P.; Chen, H. Main factors affecting the lifetime of proton exchange membrane fuel cells in vehicle applications: A review. Appl. Energy 2014, 125, 60–75. [Google Scholar] [CrossRef]
- Fowler, M.W.; Mann, R.F.; Amphlett, J.C.; Peppley, B.A.; Roberge, P.R. Incorporation of voltage degradation into a generalised steady state electrochemical model for a PEM fuel cell. J. Power Sources 2002, 106, 274–283. [Google Scholar] [CrossRef]
- Lin, C.; Luo, W.; Lan, H.; Hu, C. Research on Multi-Objective Compound Energy Management Strategy Based on Fuzzy Control forFCHEV. Energies 2022, 15, 1721. [Google Scholar] [CrossRef]
- Pei, P.C.; Chang, Q.F.; Tang, T. A quick evaluating method for automotive fuel cell lifetime. Int. J. Hydrogen Energy 2008, 33, 3829–3836. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Parameter/Unit | Numerical Value |
|---|---|---|
| Whole vehicle section | Total vehicle mass | 1138 |
| Wind resistance coefficient | 0.335 | |
| Windward area | 2 | |
| Tires | Wheel radius | 0.282 |
| Rolling resistance factor | 0.009 | |
| Rotating mass conversion factor | 1 | |
| Motor drive | Maximum power | 75 |
| Peak efficiency | 0.92 | |
| Fuel cell | Maximum net power | 50 |
| Peak efficiency | 0.6 | |
| Number of FC units | 411 | |
| Supercapacitor | Capacity of equivalent capacitor C | 2 |
| Charge/discharge resistance | 0.0026 | |
| Self-discharge loss resistance | 965 | |
| Rated voltage | 2 | |
| Number of groups | 80 | |
| DC/DC model | Efficiency of unidirectional DC/DC converter | 96 |
| Efficiency of bidirectional DC/DC converter | 97 | |
| Motor | Conversion efficiency of motor | 92 |
| Motor time constant | 1.1 |
| Operating Mode | Fuel Cell Operating Conditions | Supercapacitor Operating Conditions |
|---|---|---|
| Joint driving | On | Discharge |
| Line charging | On | Charging |
| Separate driving for supercapacitor | Off | Discharge |
| Recovery of braking energy | Off | Charging |
| Name of the Module | Meaning |
|---|---|
| Drive cycle | Driving conditions of vehicle |
| Vehicle | Whole vehicle module |
| Wheel and axle | Wheel and axle of vehicle |
| Final drive | Main reducer |
| Gearbox | Mechanical gearbox |
| Motor/controller | Driving motor and its controller |
| Boost converter | Boost DC-DC converter |
| Buck/boost converter | Buck/boost DC-DC converter |
| Power bus | Direct current power bus |
| Electric acc loads | Electric accessory power calculation module |
| Energy storage | Supercapacitor |
| MPC <cs> | MLD-MPC control strategy |
| Fuel converter | Fuel cell |
| Exhaust system | Emission treatment module |
| <vc> fuel cell | Vehicle control module |
| <sdo> fuel cell | Data output module |
| Entry | Data |
|---|---|
| Driving time | 1800 s |
| Distance traveled | 23.27 km |
| Maximum speed | 131.33 km/h |
| Average speed | 46.51 km/h |
| Maximum acceleration | 1.75 m/s2 |
| Maximum deceleration | −1.5 m/s2 |
| Average acceleration | 0.42 m/s2 |
| Average deceleration | −0.44 m/s2 |
| Idle time | 235 s |
| Number of starts and stops | 8 |
| Initial SOC for supercapacitors | 70% |
| Parameters | |
|---|---|
| 45.3 | |
| 44.6 | |
| 46.4 | |
| 45.7 | |
| 44.6 | |
| 47.5 |
| Performance Indicators | PFCS | CFCS | MLD-MPC |
|---|---|---|---|
| 50.1 | 45.5 | 44.6 | |
| Number of FC starts/stops | 6 | 4 | 0 |
| Average efficiency of FC | 0.53 | 0.55 | 0.57 |
| Average efficiency of supercapacitor | 0.98 | 0.98 | 0.98 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Luo, W.; Zhang, G.; Zou, K.; Lin, C. MLD Modeling and MPC-Based Energy Management Strategy for Hydrogen Fuel Cell/Supercapacitor Hybrid Electric Vehicles. World Electr. Veh. J. 2024, 15, 151. https://doi.org/10.3390/wevj15040151
Luo W, Zhang G, Zou K, Lin C. MLD Modeling and MPC-Based Energy Management Strategy for Hydrogen Fuel Cell/Supercapacitor Hybrid Electric Vehicles. World Electric Vehicle Journal. 2024; 15(4):151. https://doi.org/10.3390/wevj15040151
Chicago/Turabian StyleLuo, Wenguang, Guangyin Zhang, Ke Zou, and Cuixia Lin. 2024. "MLD Modeling and MPC-Based Energy Management Strategy for Hydrogen Fuel Cell/Supercapacitor Hybrid Electric Vehicles" World Electric Vehicle Journal 15, no. 4: 151. https://doi.org/10.3390/wevj15040151
APA StyleLuo, W., Zhang, G., Zou, K., & Lin, C. (2024). MLD Modeling and MPC-Based Energy Management Strategy for Hydrogen Fuel Cell/Supercapacitor Hybrid Electric Vehicles. World Electric Vehicle Journal, 15(4), 151. https://doi.org/10.3390/wevj15040151