

Application of Real-Life On-Road Driving Data for Simulating the Electrification of Long-Haul Transport Trucks


Abstract
1. Introduction
2. Simulation Environment
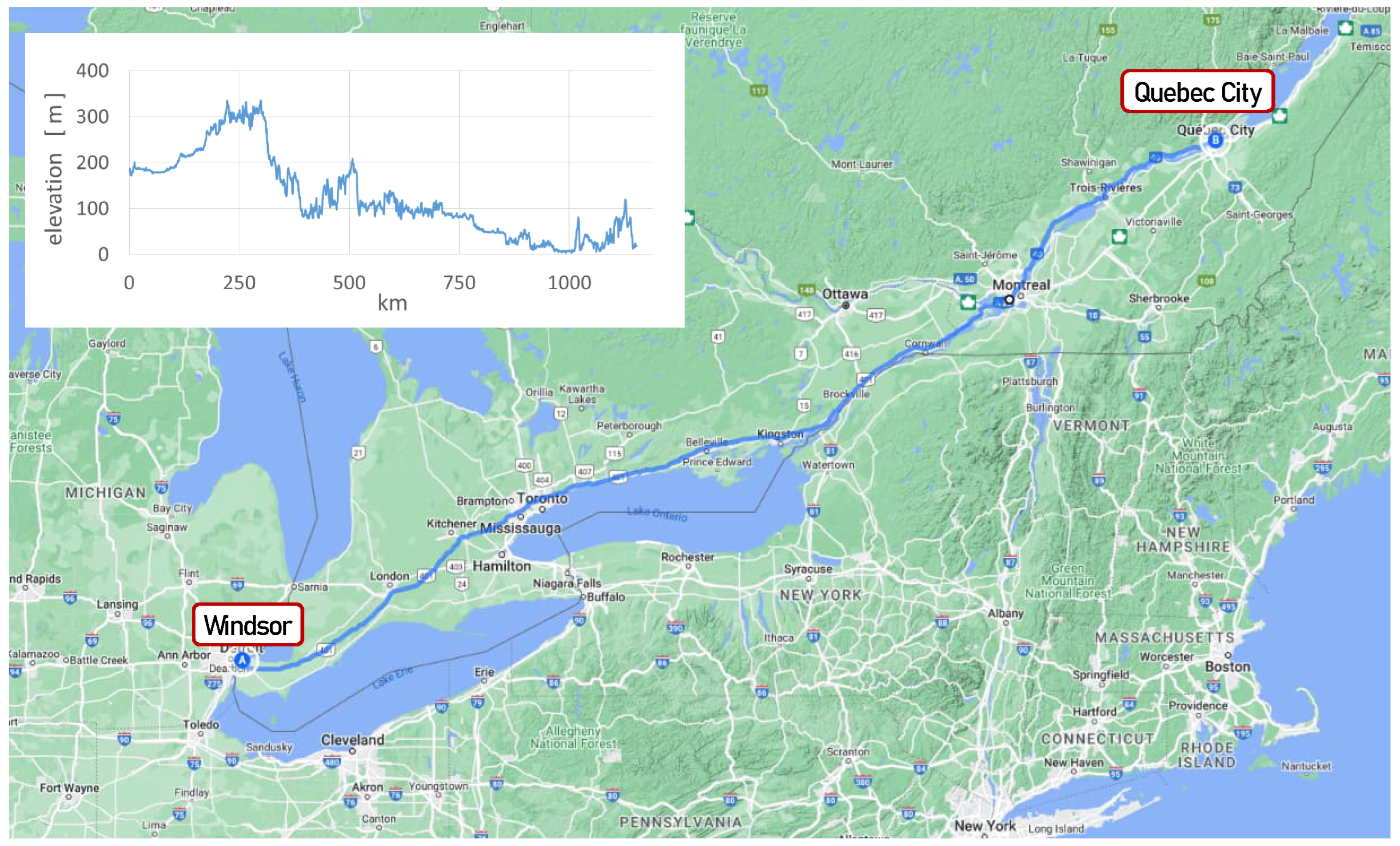
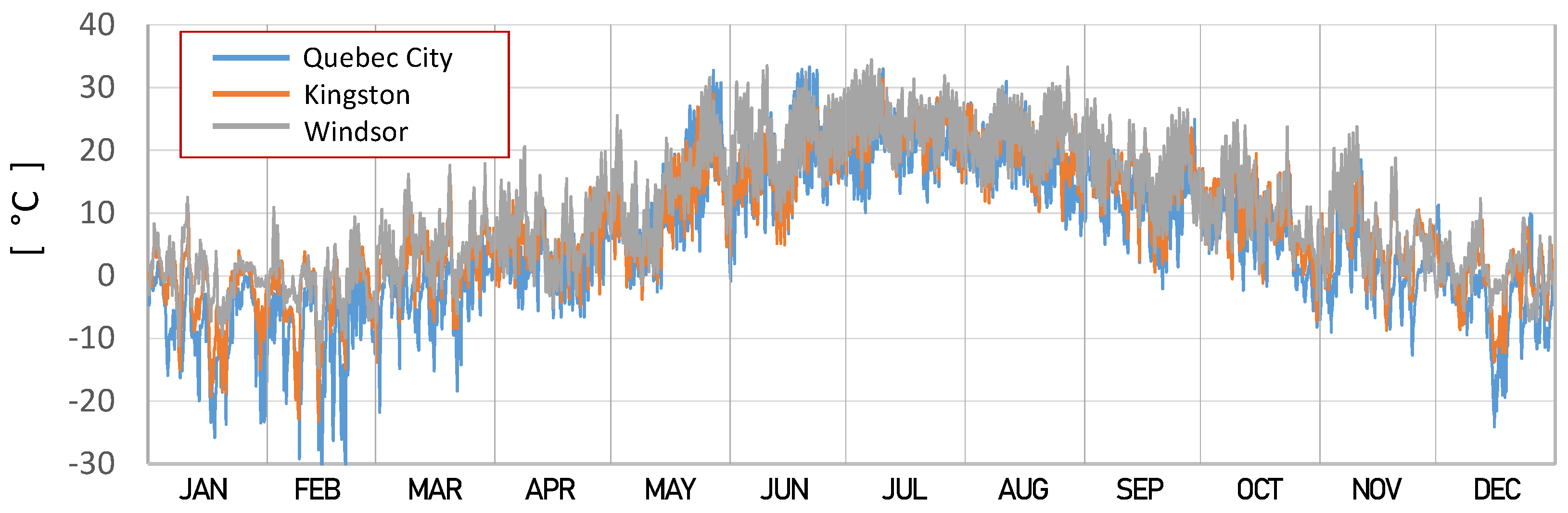
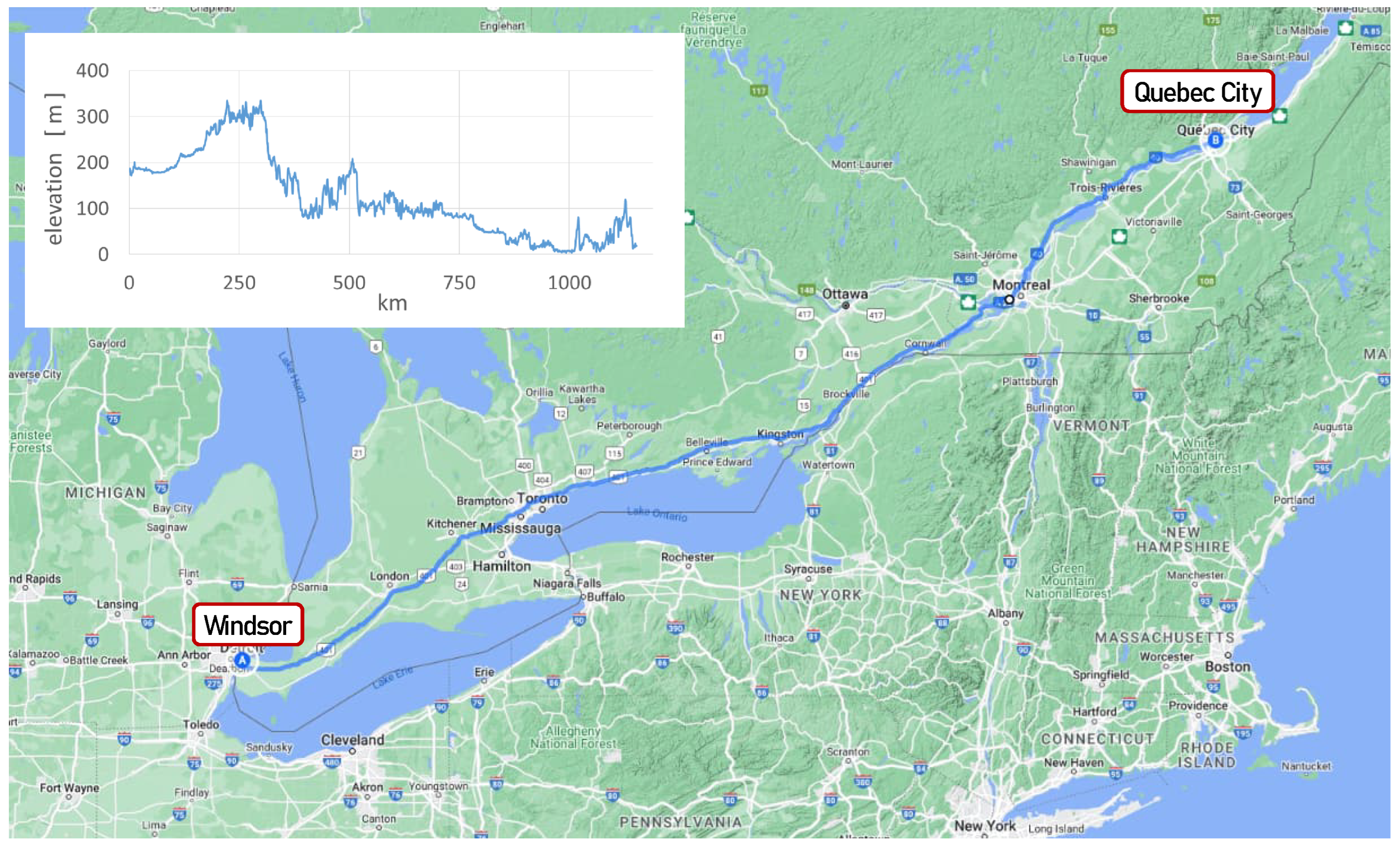
2.1. Driving Route
2.2. Electric Truck Technical Specifications
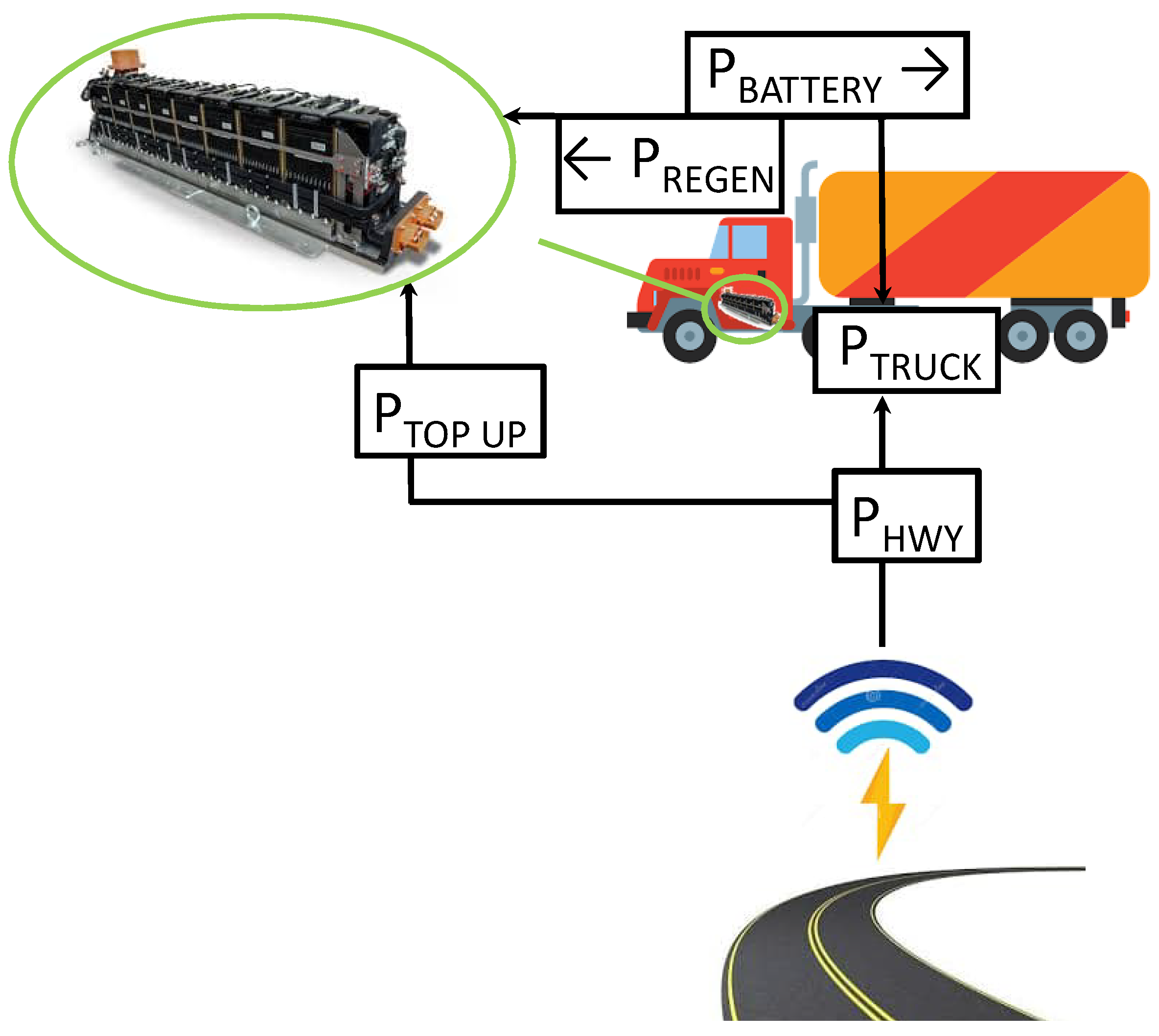
2.3. Truck and Battery Power Load Model
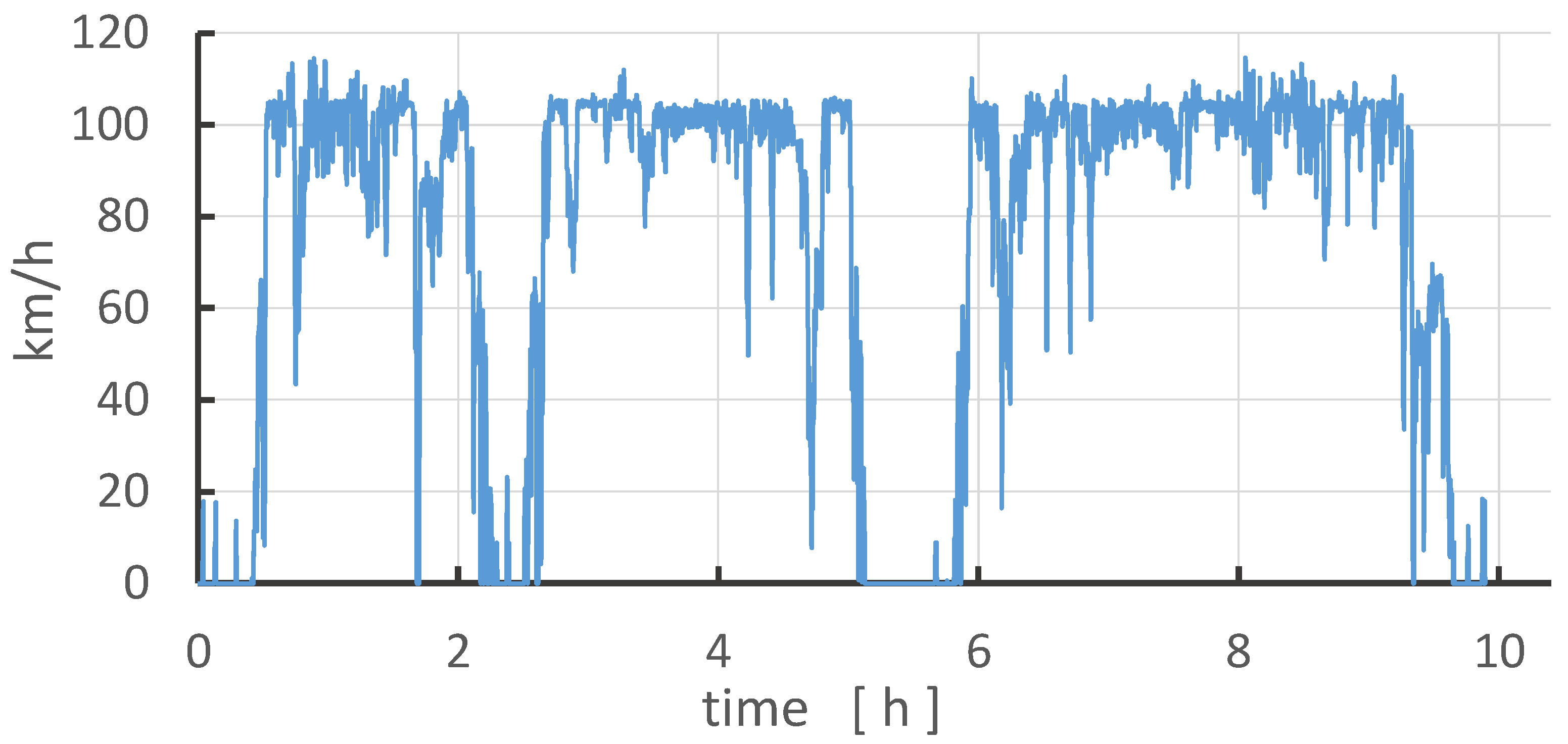
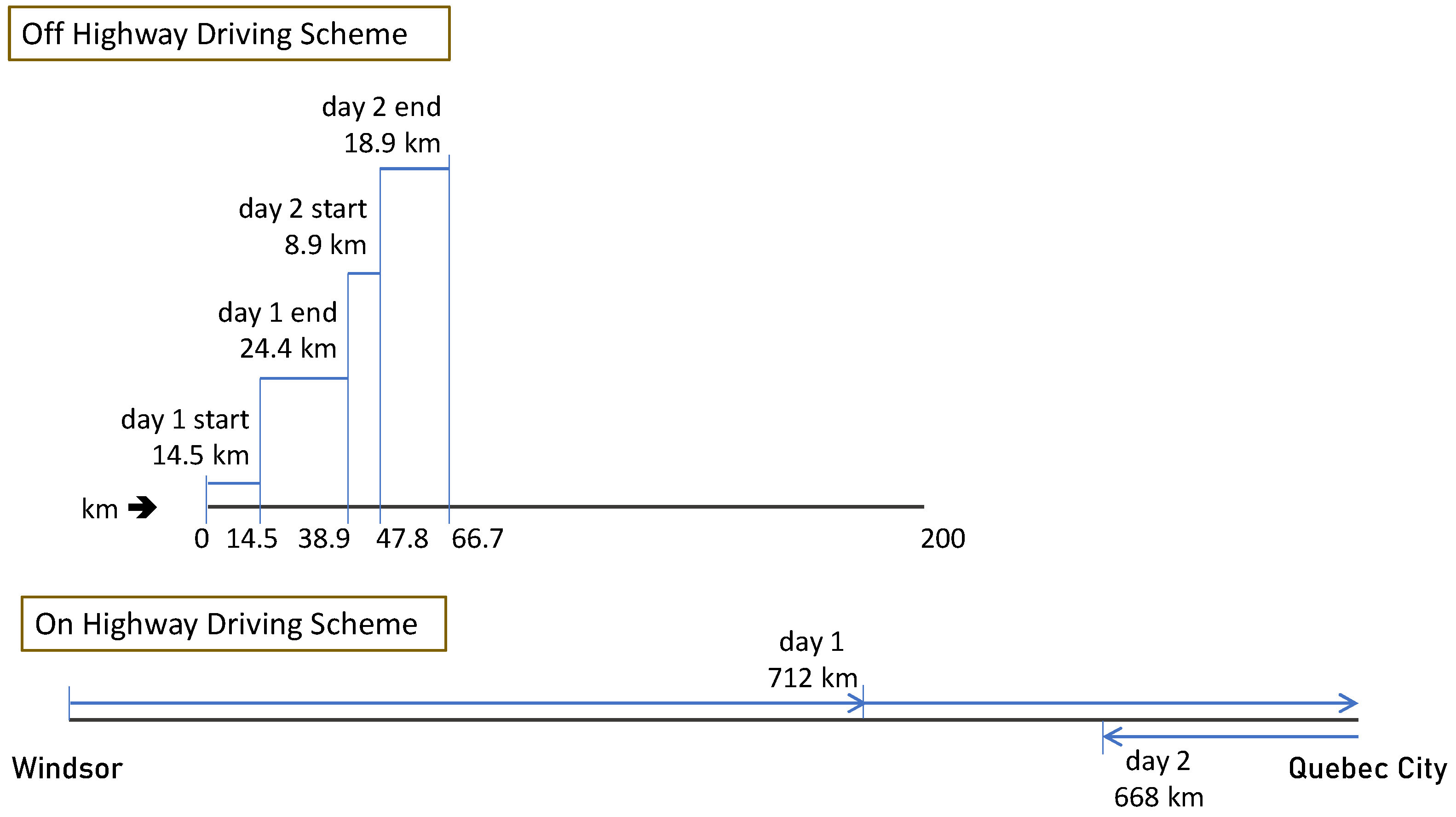
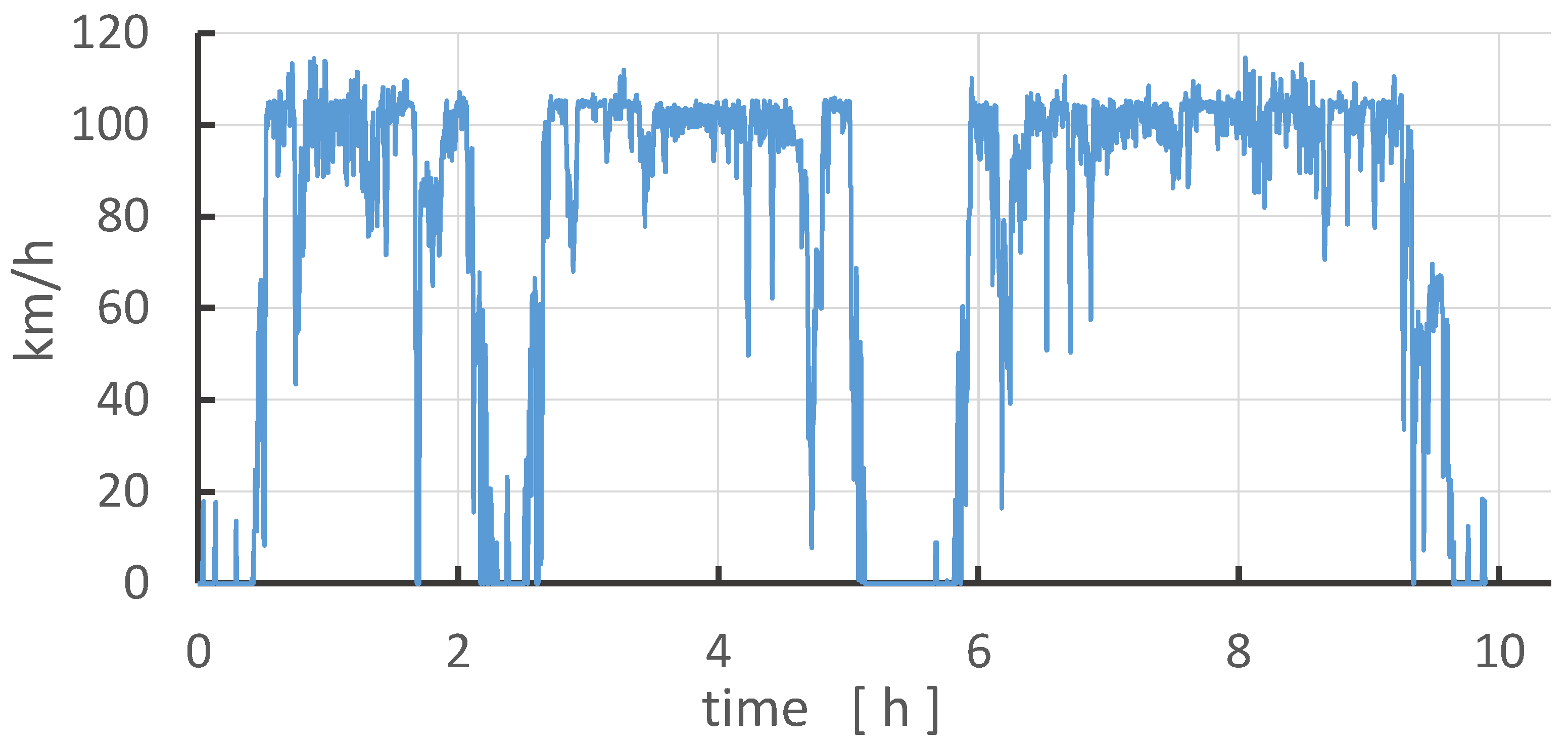
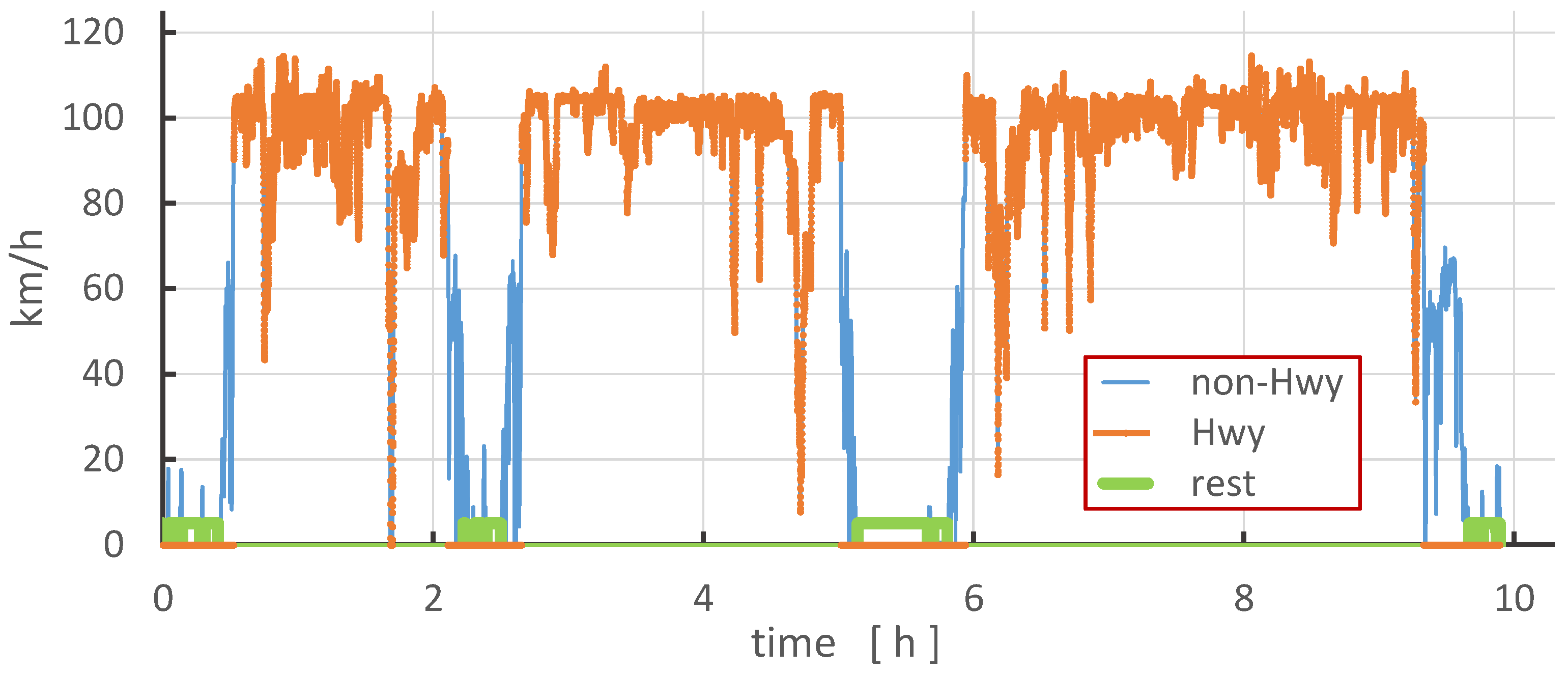
2.4. Characterization of Long-Haul Truck Driving
2.5. Duty Cycles from Detailed Day-by-Day On-Road Long Haul Truck Data
3. Simulation Cases—Study Scope
4. Results
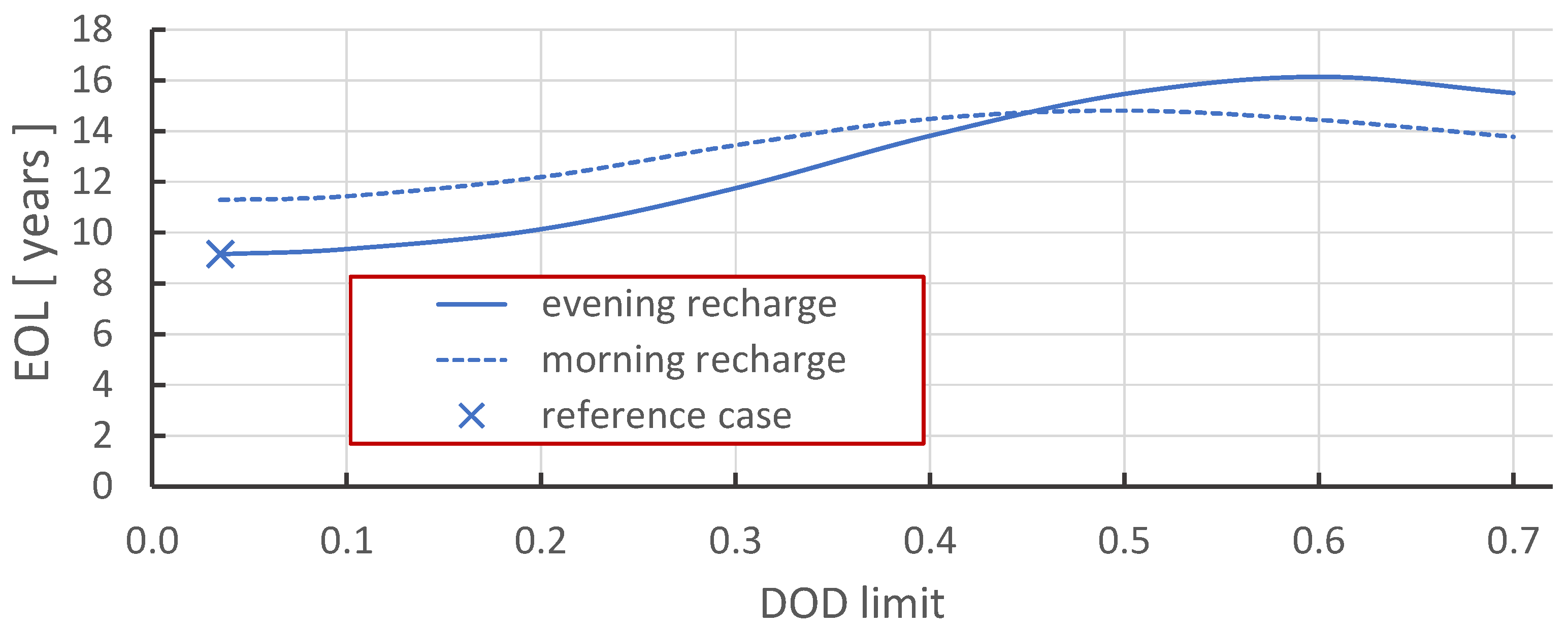
4.1. BET Reference Cases
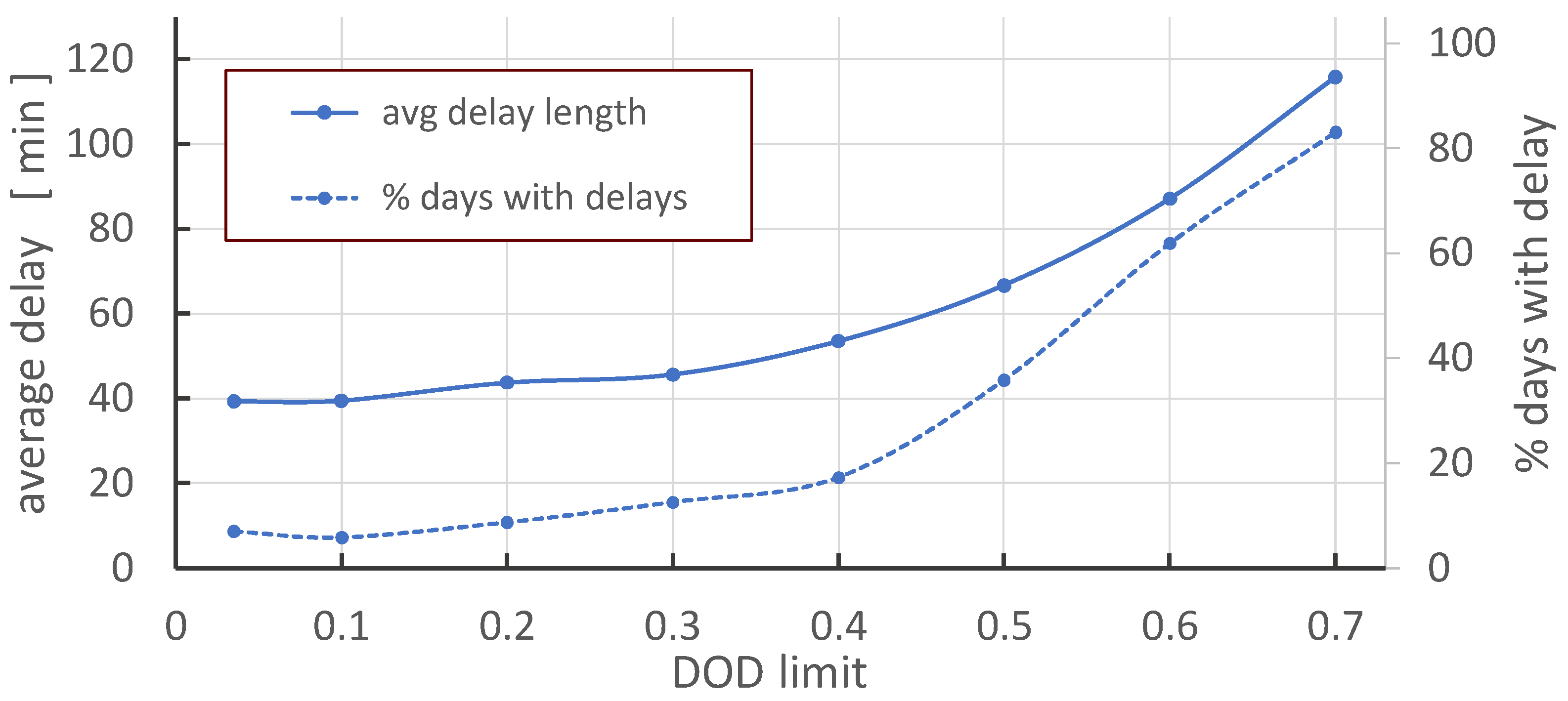
Impact of Recharge Scheduling on BETs
4.2. EHTs—Comparison to Reference BET Cases
BETs and EHTs—Comparison with Preliminary Study
4.3. EHT DWPT Power Provision Level
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| BET | battery electric truck |
| BMS | battery management system |
| CPT | conductive power transfer |
| DOD | depth of discharge |
| DWPT | dynamic wireless power transfer |
| e-Hwy | electrified roadway furnishing DWPT |
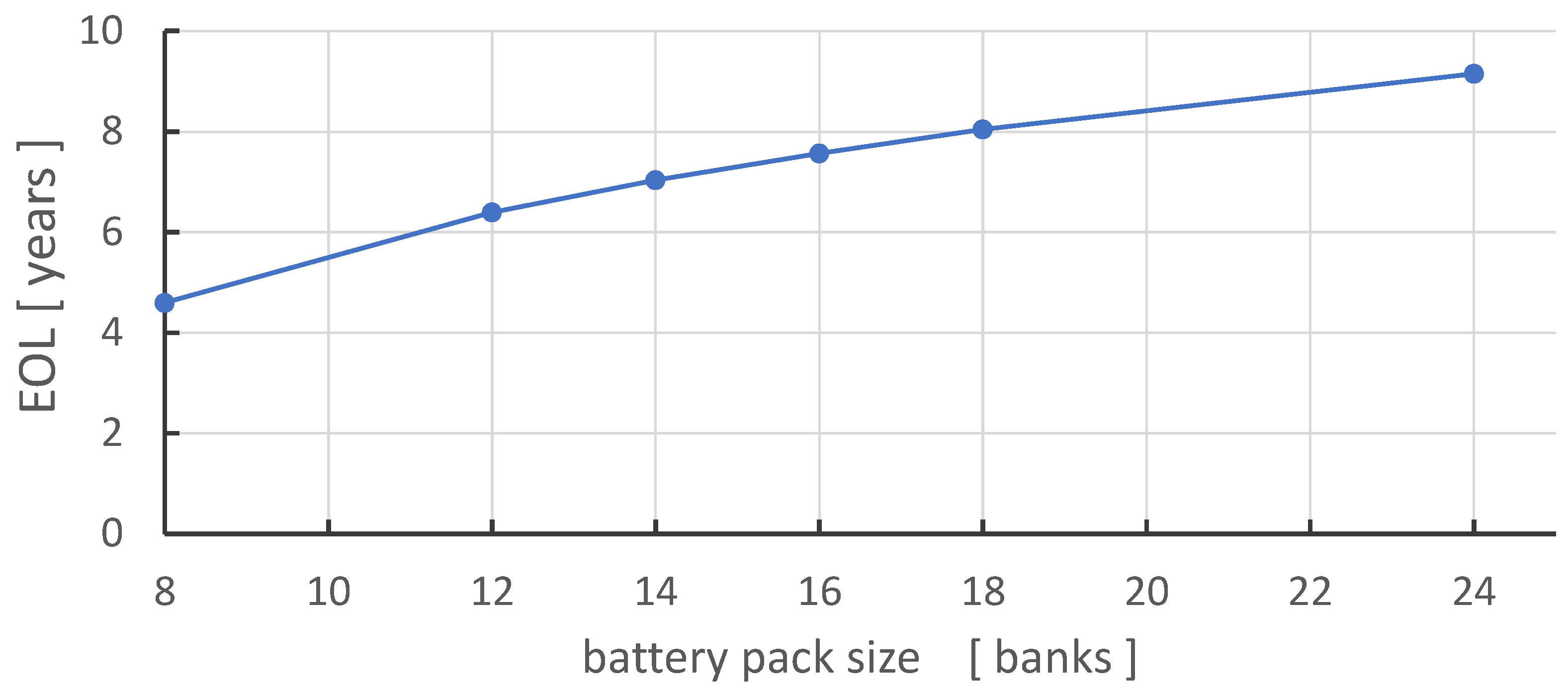
| EOL | battery EOL life value, in years |
| EV | electric vehicle |
| OCV | open-circuit voltage |
| P2D | pseudo two-dimensional |
| SEI | solid-electrolyte interface |
| SOC | state of charge |
| SOH | state of health |
References
- Darcovich, K.; Ribberink, H.; Qiu, K.; Soufflet, E. Battery Pack Prospects for Long-Haul Transport Trucks Considering Electrified Highways and Megawatt Charging. World Electr. Veh. J. 2023, 14, 60. [Google Scholar] [CrossRef]
- Ribberink, H.; Wu, Y.; Lombardi, K.; Yang, L. Electrification Opportunities in the Medium-and Heavy-Duty Vehicle Segment in Canada. World Electr. Veh. J. 2021, 12, 86. [Google Scholar] [CrossRef]
- Afridi, K Wireless charging of electric vehicles. Front. Eng. 2017, 47, 17–22.
- Qiu, K.; Ribberink, H.; Entchev, E. Economic feasibility of electrified highways for heavy-duty electric trucks. Appl. Energy 2022, 326, 119935. [Google Scholar] [CrossRef]
- Haddad, D.; Konstantinou, T.; Aliprantis, D.; Gkritza, K.; Pekarek, S.; Haddock, J. Analysis of the financial viability of high-powered electric roadways: A case study for the state of Indiana. Energy Policy 2022, 171, 113275. [Google Scholar] [CrossRef]
- Mayer, J.; Archbold, W.K.; Harte, C.R.; Osgood, F.; Murray, W.S. Discussion on Overhead Electric Traction. Trans. Am. Soc. Civ. Eng. 1908, 60, 539–562. [Google Scholar] [CrossRef]
- Gibson, S. Transportation 1990: Toll Roads? Transit Incentives? Electrified Freeways? Trucks In Diamond Lanes? Calif. J. 1980, 417–420. [Google Scholar]
- Kanafani, A.; Parsons, R.E. Program on advanced technology for the highway: Vehicle/highway research and development. In Proceedings of the Conference Record of Papers Presented at the First Vehicle Navigation and Information Systems Conference (VNIS’89), Toronto, ON, Canada, 11–13 September 1989; IEEE: New York, NY, USA, 1989; pp. 270–272. [Google Scholar]
- Bender, J.G. An overview of systems studies of automated highway systems. IEEE Trans. Veh. Technol. 1991, 40, 82–99. [Google Scholar] [CrossRef]
- Jones, P.T.; Onar, O. Impact of wireless power transfer in transportation: Future transportation enabler, or near term distraction. In Proceedings of the 2014 IEEE International Electric Vehicle Conference (IEVC), Florence, Italy, 17–19 December 2014; IEEE: New York, NY, USA, 2014; pp. 1–7. [Google Scholar]
- Rakhymbay, A.; Bagheri, M.; Lu, M. A simulation study on four different compensation topologies in EV wireless charging. In Proceedings of the 2017 International Conference on Sustainable Energy Engineering and Application (ICSEEA), Jakarta, Indonesia, 23–24 October 2017; IEEE: New York, NY, USA, 2017; pp. 66–73. [Google Scholar]
- Soares, L.; Wang, H. A study on renewed perspectives of electrified road for wireless power transfer of electric vehicles. Renew. Sustain. Energy Rev. 2022, 158, 112110. [Google Scholar] [CrossRef]
- Osieczko, K.; Zimon, D.; Płaczek, E.; Prokopiuk, I. Factors that influence the expansion of electric delivery vehicles and trucks in EU countries. J. Environ. Manag. 2021, 296, 113177. [Google Scholar] [CrossRef] [PubMed]
- Wiegmans, B.; Champagne-Gelinas, A.; Duchesne, S.; Slack, B.; Witte, P. Rail and road freight transport network efficiency of Canada, member states of the EU, and the USA. Res. Transp. Bus. Manag. 2018, 28, 54–65. [Google Scholar] [CrossRef]
- Gustavsson, M.G.H. Research & Innovation for Electric Roads. In Proceedings of the EVS35 Symposium, Oslo, Norway, 11–15 June 2022. [Google Scholar]
- Dhayarkar, S.; Sontakke, S.; Shinde, V.; Ghuge, N. Electric Heavy Vehicle Transportation Highway (By Catenary System). In Proceedings of the ITM Web of Conferences, EDP Sciences, Navi, Mumbai, 7–8 April 2022; Volume 44, p. 01004. [Google Scholar]
- Gouvernement de France, Ministère de la Transition énérgetique, Système de route électrique, Groupe de travail no1. Décarboner le transport routier de marchandise par l’ERS, enjeux et stratégie, (2021) July; Gouvernement de France, Ministère de la Transition énérgetique, Système de route électrique, Groupe de travail n°1: Paris, France; 196p.
- Edelstein, S. Short-Loop Electric Bus Serves as a Proving Ground for Dynamic Wireless Charging. Available online: https://www.greencarreports.com/news/1131665_short-loop-electric-bus-serves-as-a-proving-ground-for-dynamic-wireless-charging (accessed on 12 January 2023).
- Shoman, W.; Karlsson, S.; Yeh, S. Benefits of an electric road system for battery electric vehicles. World Electr. Veh. J. 2022, 13, 197. [Google Scholar] [CrossRef]
- Openshaw, S.; Etta, D.; Maji, S.; Ruan, T.; Afridi, K.K. Investigation of Commercial Viability and Public Perception of Electrified Roadways with Dynamic Wireless Charging. In Proceedings of the 2023 IEEE Wireless Power Technology Conference and Expo (WPTCE), San Diego, CA, USA, 4–8 June 2023; IEEE: New York, NY, USA, 2023; pp. 1–6. [Google Scholar]
- Darcovich, K.; Ribberink, H.; Michelet, C.; Lombard, K.; Ghorab, M. The Feasibility of Electric Vehicles as Taxis in a Canadian Context. In Proceedings of the 2019 Electric Vehicles International Conference (EV), Bucharest, Romania, 3–4 October 2019; IEEE: New York, NY, USA, 2019; pp. 1–6. [Google Scholar]
- Humphries, K.; Cooper, C.; Ahmadi, M. Heavy-Duty Diesel Truck In-Use NOx Emissions Evaluation Using On-BoardSensors; SAE Technical Paper 2022-01-5098; SAE: Warrendale, PA, USA, 2022. [Google Scholar] [CrossRef]
- Council of the European Union. Interinstitutional File: 2021/0197(COD), Proposal for a Regulation of the European Parliament and of the Council Amending Regulation (EU) 2019/631 as Regards Strengthening the CO2 Emission Performance Standards for New Passenger Cars and New Light Commercial Vehicles in Line with the Union’s Increased Climate Ambition. Brussels, 25 June 2022; Council of the European Union: Brussels, Belgium; p. 22.
- Darcovich, K.; Recoskie, S.; MacNeil, D.D.; Darcovich, A. Operational intra-cycle temporal and current mode effects on battery capacity loss. eTransportation 2022, 13, 100185. [Google Scholar] [CrossRef]
- Darcovich, K.; Ribberink, H.; Qiu, K.; Soufflet, E. Investigation of Electric Highway Alternatives to MegaWatt Charging. In Proceedings of the EVS35 Symposium, Oslo, Norway, 11–15 June 2022. [Google Scholar]
- Google Earth. Available online: https://earth.google.com (accessed on 7 March 2022).
- Environment Canada. Historical Weather Data. Available online: http://climate.weather.gc.ca/historical_data/search_historic_data_e.html (accessed on 11 March 2022).
- Tesla. Available online: https://www.tesla.com/en_ca/semi (accessed on 2 October 2022).
- Knapton, D.A. Investigation of Truck Size and Weight Limits—Technical Supplement. Vol. 3. Truck and Rail Fuel Effects of Truck Size and Weight Limits; Deptartament of Transportation, Office of the Secretary: Washington, DC, USA, 1981.
- Foote, A.; Onar, O.C.; Debnath, S.; Chinthavali, M.; Ozpineci, B.; Smith, D.E. Optimal sizing of a dynamic wireless power transfer system for highway applications. In Proceedings of the 2018 IEEE Transportation Electrification Conference and Expo (ITEC), Long Beach, CA, USA, 13–15 June 2018; pp. 1–6. [Google Scholar]
- Eriksson, R. Volvo Cars to test new wireless charging technology in green city zone. In Proceedings of the EVS35 Symposium, Oslo, Norway, 11–15 June 2022. [Google Scholar]
- Ribberink, H.; Lombardi, K.; Humphries, K.; Loiselle-Lapointe, A.; Stefopulos, N.; Varghese, S.; Pundsack, N. Impact of Ambient Temperature and Battery Activity on Internal Battery Temperatures of Electric Vehicles. In Proceedings of the 32nd International Electric Vehicle Symposium and Exhibition (EVS32), Lyon, France, 19–22 May 2019. [Google Scholar]
- J1939 Mini Logger. Available online: https://hemdata.com/products/dawn/j1939-mini-logger/ (accessed on 10 August 2022).
- Talebian, H.; Herrera, O.E.; Tran, M.; Mérida, W. Electrification of road freight transport: Policy implications in British Columbia. Energy Policy 2018, 115, 109–118. [Google Scholar] [CrossRef]
- Darcovich, K.; Recoskie, S.; Fattal, F. Fast operational mode switching effects on battery degradation. J. Appl. Electrochem. 2020, 50, 111–124. [Google Scholar] [CrossRef]
- Ontario Energy Board. Available online: https://www.oeb.ca/consumer-information-and-protection/electricity-rates (accessed on 10 March 2023).
- Tong, F.; Wolfson, D.; Jenn, A.; Scown, C.D.; Auffhammer, M. Energy consumption and charging load profiles from long-haul truck electrification in the United States. Environ. Res. Infrastruct. Sustain. 2021, 1, 025007. [Google Scholar] [CrossRef]
- Schmidt, F.; Jacob, B.; Domprobst, F. Investigation of truck weights and dimensions using WIM data. Transp. Res. Procedia 2016, 14, 811–819. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Battery Pack Size | |
| banks | kWh/bank |
| 8 to 24 | 73 |
| e-Hwy DWPT uptake | |
| [kW] | efficiency [%] |
| 300–400 | 85 |
| recharge parameters | |
| Type | DOD range |
| Morning rchg | smallest: 0.70–0.95 |
| Evening rchg | largest: 0.035–0.95 |
| MTR | |
| Vehicle | Battery | Weight | EOL | Energy Use | |
|---|---|---|---|---|---|
| Pack Size | (kW) | (kg) | (years) | (kWh/km) | |
| BET | 24 banks | - | 36,000 (maximum) | 8.33 | 1.74 |
| BET | 24 banks | - | 16,000 (empty) | 10.39 | 1.21 |
| EHT | 12 banks | 300 | 36,000 (maximum) | 23.93 | 1.81 |
| EHT | 12 banks | 300 | 16,000 (empty) | 26.21 | 1.24 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Darcovich, K.; Ribberink, H.; Soufflet, E.; Lauras, G. Application of Real-Life On-Road Driving Data for Simulating the Electrification of Long-Haul Transport Trucks. World Electr. Veh. J. 2024, 15, 149. https://doi.org/10.3390/wevj15040149
Darcovich K, Ribberink H, Soufflet E, Lauras G. Application of Real-Life On-Road Driving Data for Simulating the Electrification of Long-Haul Transport Trucks. World Electric Vehicle Journal. 2024; 15(4):149. https://doi.org/10.3390/wevj15040149
Chicago/Turabian StyleDarcovich, K., H. Ribberink, E. Soufflet, and G. Lauras. 2024. "Application of Real-Life On-Road Driving Data for Simulating the Electrification of Long-Haul Transport Trucks" World Electric Vehicle Journal 15, no. 4: 149. https://doi.org/10.3390/wevj15040149
APA StyleDarcovich, K., Ribberink, H., Soufflet, E., & Lauras, G. (2024). Application of Real-Life On-Road Driving Data for Simulating the Electrification of Long-Haul Transport Trucks. World Electric Vehicle Journal, 15(4), 149. https://doi.org/10.3390/wevj15040149