
A K-Additive Fuzzy Logic Approach for Optimizing FCS Sizing and Enhanced User Satisfaction


Abstract
:
1. Introduction
- This study introduces a multi-objective problem aimed at optimizing the delay, represented by both EV users’ waiting time and the charging time at the stations, and the cost represented by the number of charging stations.
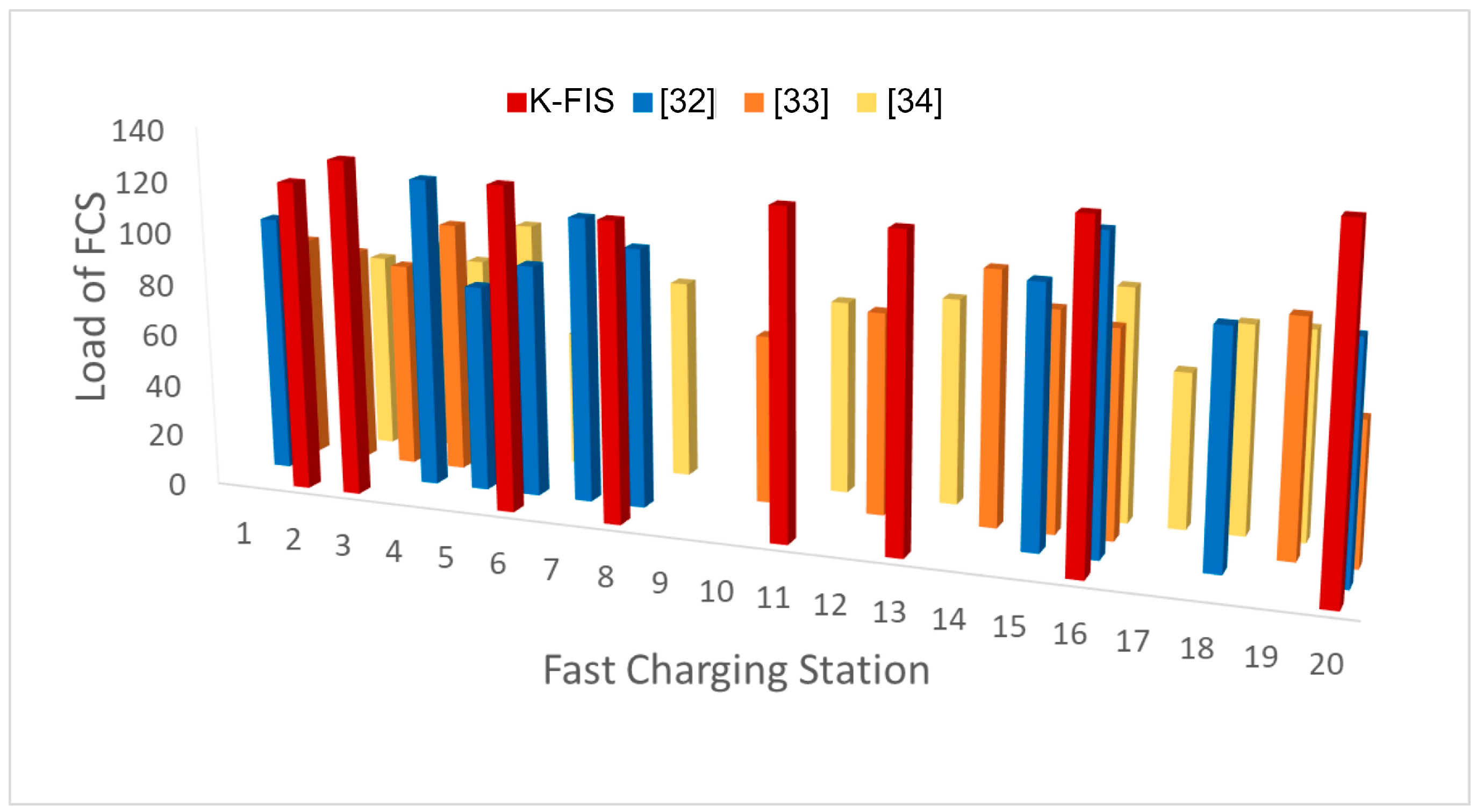
- The paper focuses on modeling the charging stations using the M/M/c model with the objective of maximizing station utilization and enhancing user satisfaction.
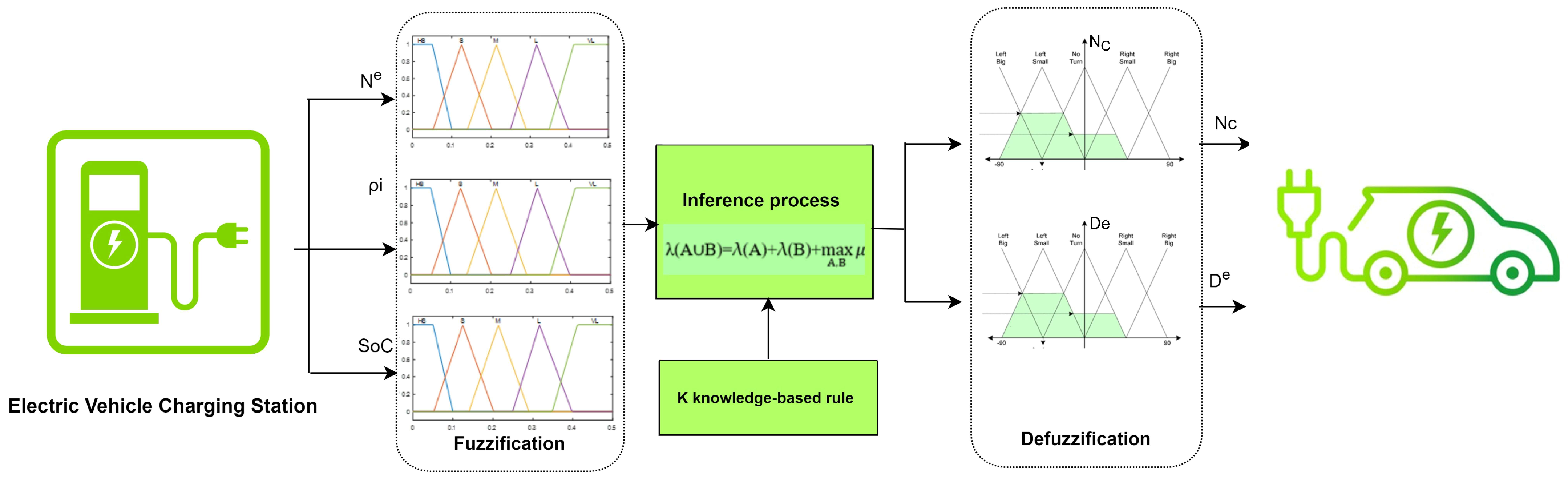
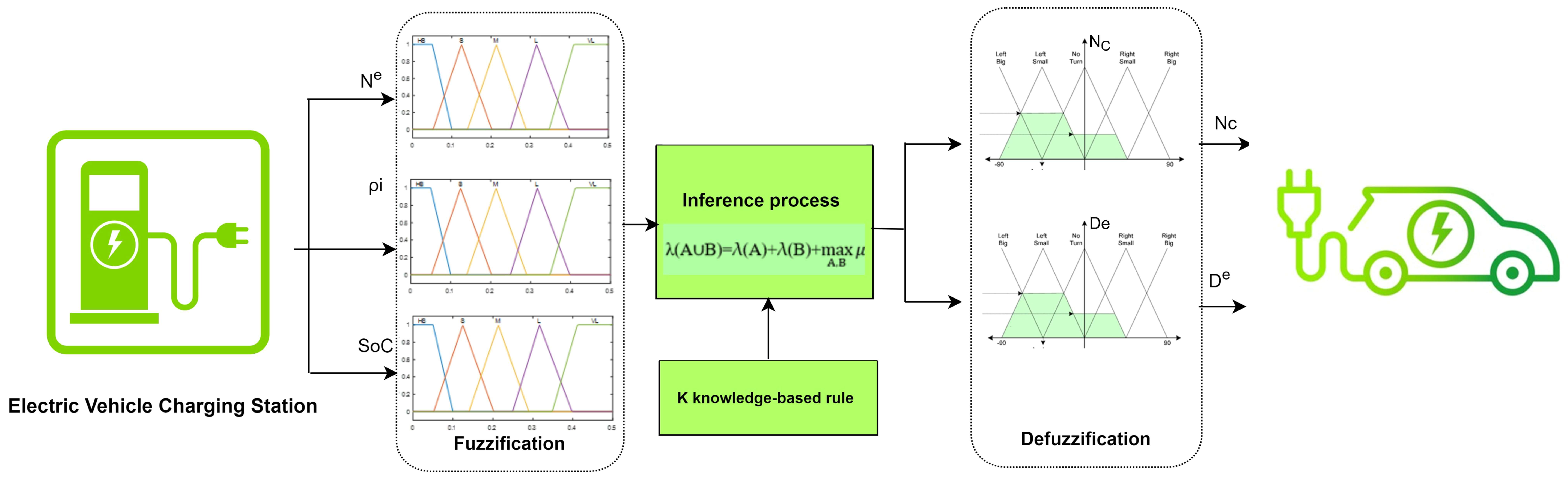
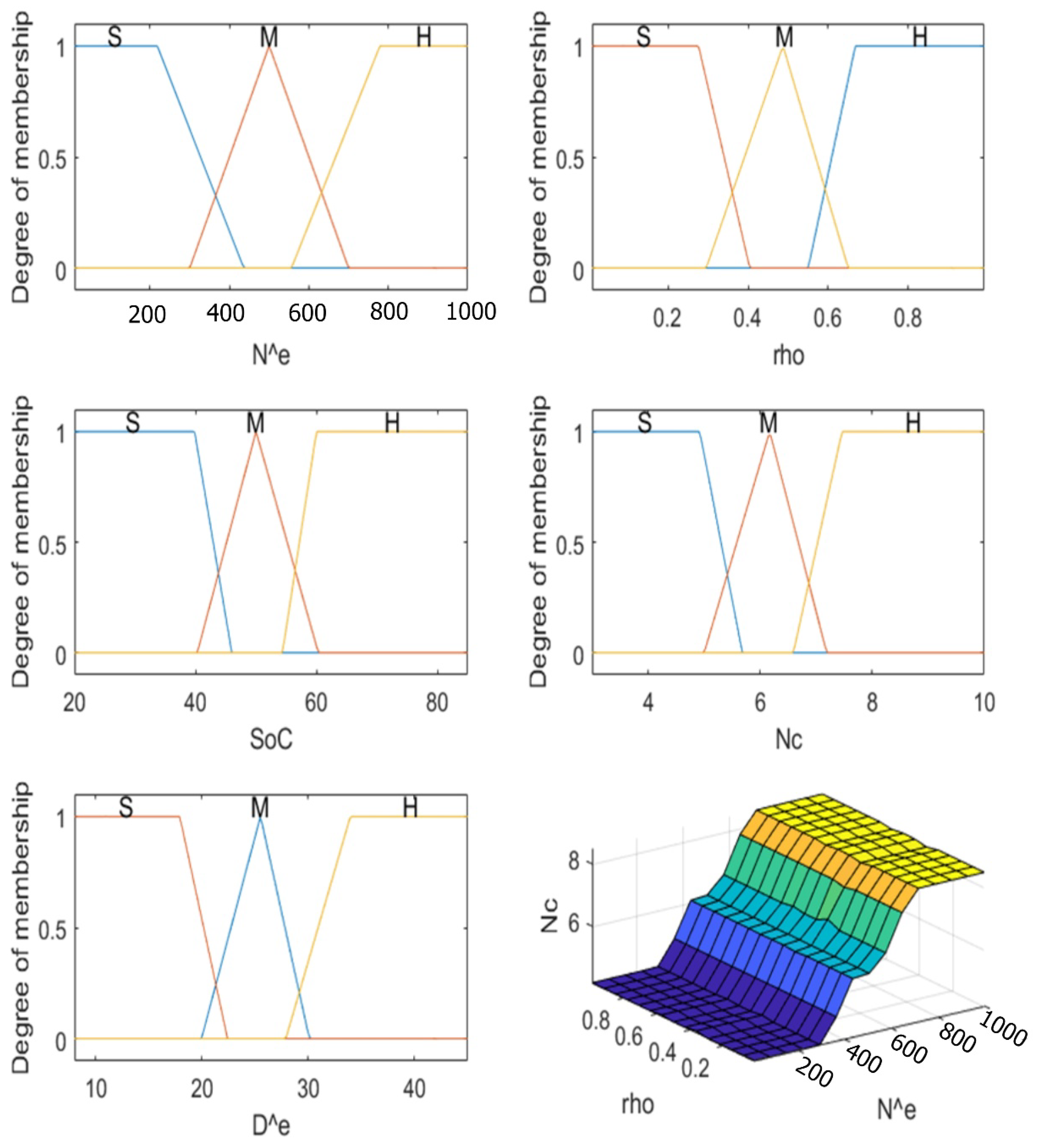
- K-additive fuzzy logic is implemented to predict both the average waiting time and the optimal number of charging stations in this context.
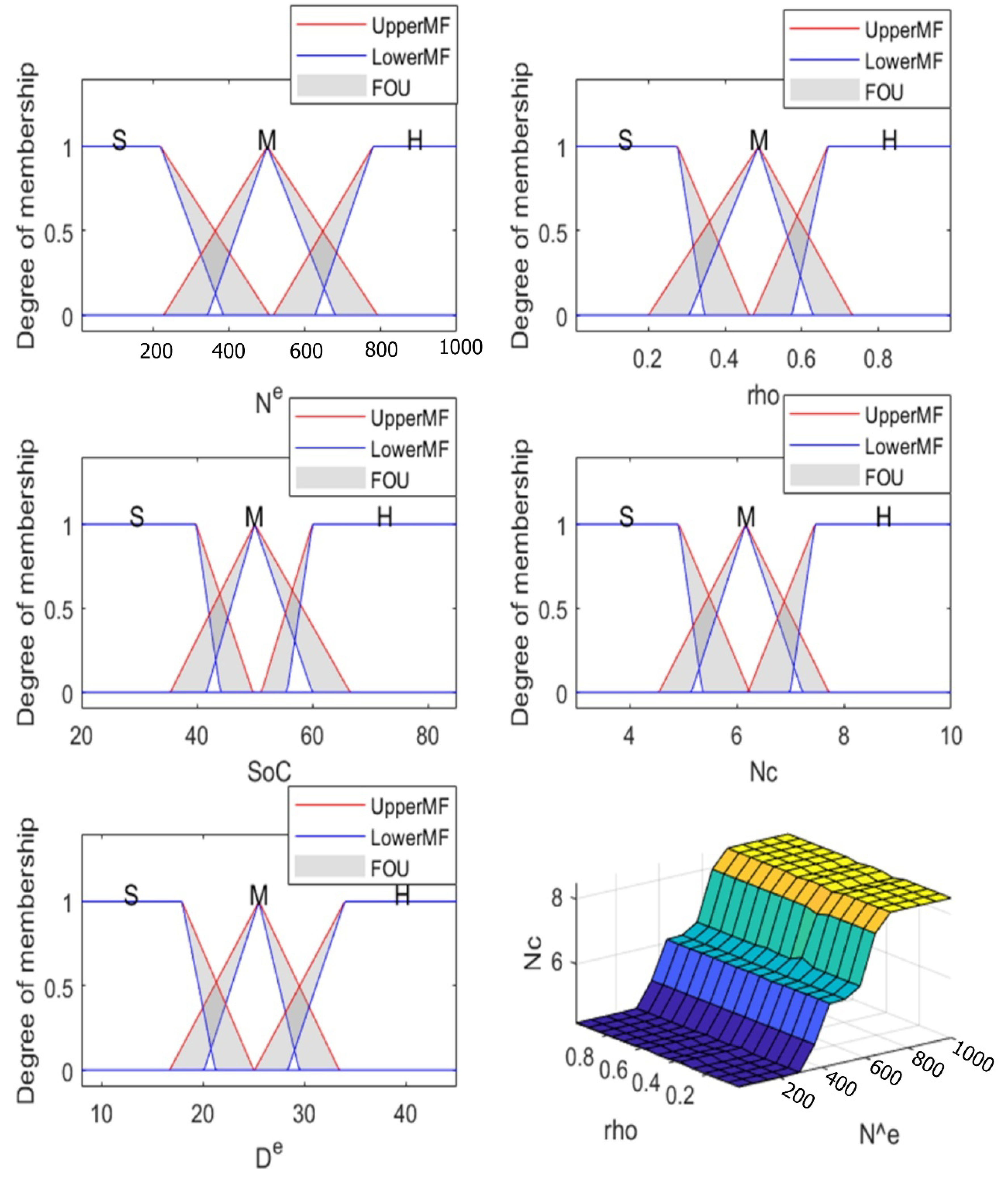
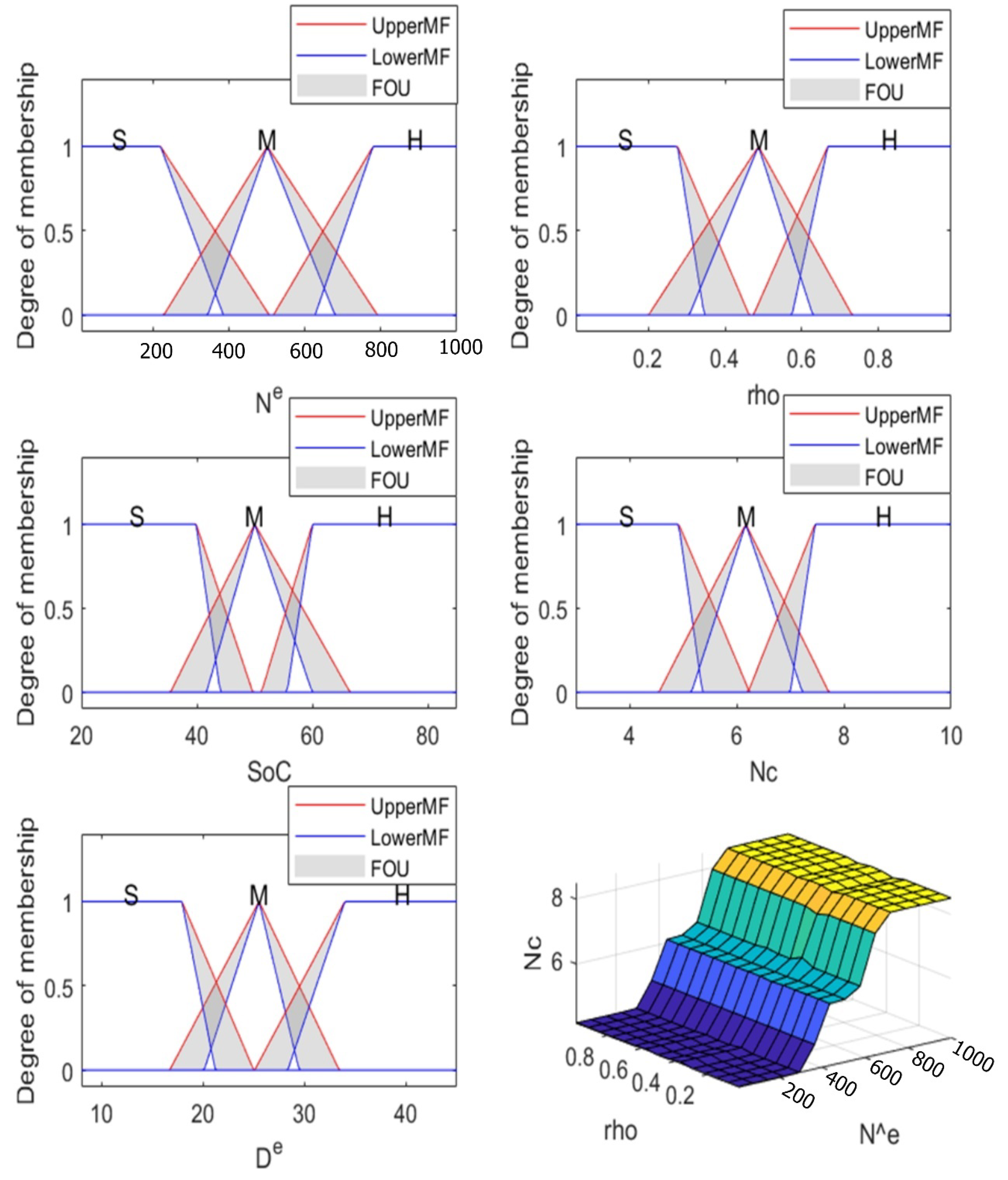
- The scheme utilizes both Type 1 and Type 2 membership functions for the K-additive FIS, offering a detailed comparison.
2. Literature Review
3. Proposed K-Additive Fuzzy Logic-Based Algorithm
3.1. Delay Time at the Charging Station
3.2. Top of Form
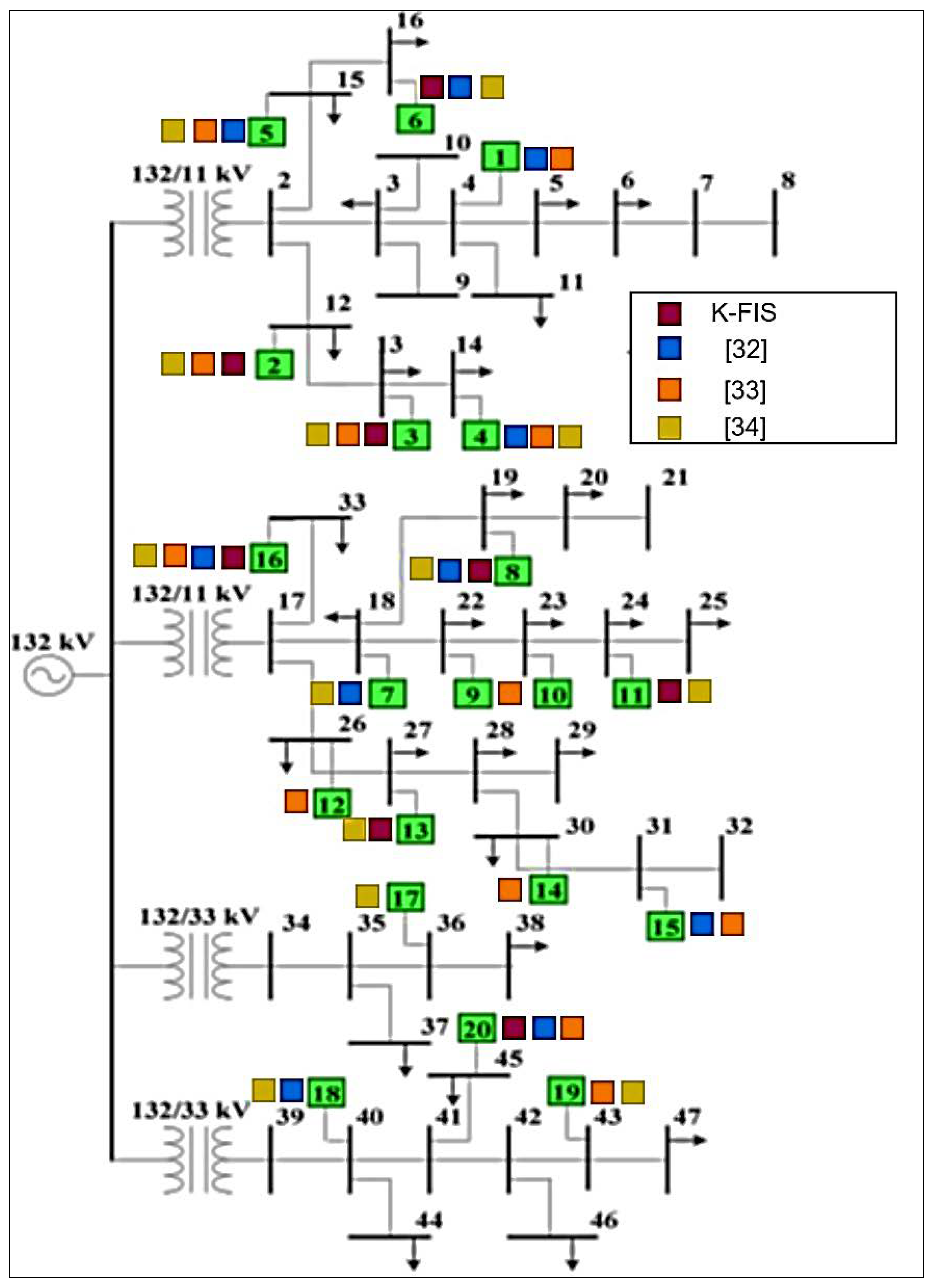
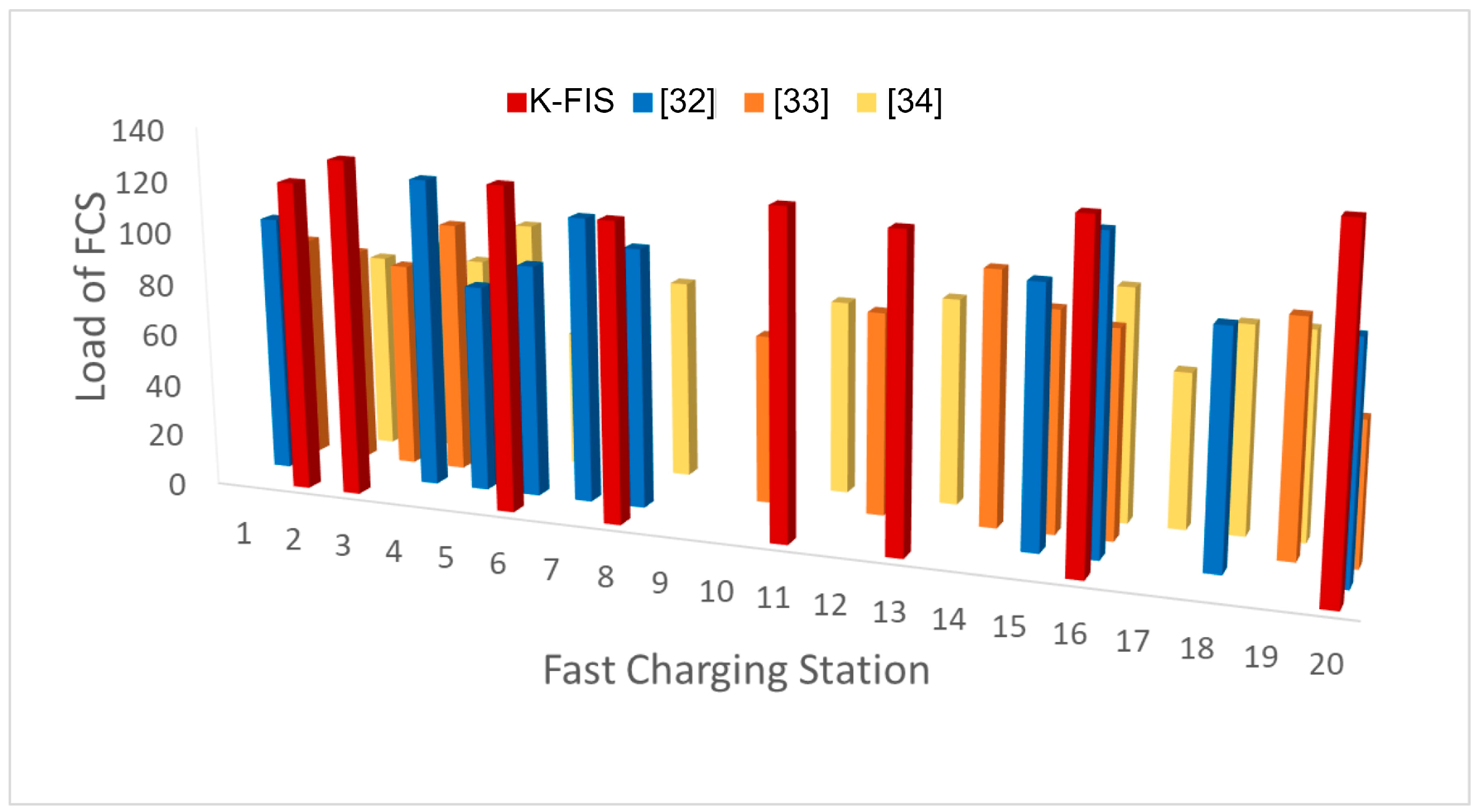
4. Simulations and Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Awasthi, A.; Venkitusamy, K.; Padmanaban, S.; Selvamuthukumaran, R.; Blaabjerg, F.; Singh, A.K. Optimal planning of electric vehicle charging station at the distribution system using hybrid optimization algorithm. Energy 2017, 133, 70–78. [Google Scholar] [CrossRef]
- Liang, H.; Sharma, I.; Zhuang, W.; Bhattachary, K. Plug-in electric vehicle charging demand estimation based on queueing network analysis. In Proceedings of the 2014 IEEE PES General Meeting Conference & Exposition, National Harbor, MD, USA, 27–31 July 2014. [Google Scholar]
- Wang, C.; Cheng, X.; Li, J. A survey: Applications of blockchain in the Internet of Vehicles. J. Wirel. Commun. Netw. 2021, 2021, 77. [Google Scholar] [CrossRef]
- Zhu, J.; Li, Y.; Yang, J.; Li, X.; Zeng, S.; Chen, Y. Planning of electric vehicle charging station based on queuing theory. J. Eng. 2017, 13, 1867–1871. [Google Scholar] [CrossRef]
- Abraham, D.S.; Chandrasekar, B.; Rajamanickam, N.; Vishnuram, P.; Ramakrishnan, V.; Bajaj, M.; Piecha, M.; Blazek, V.; Prokop, L. Fuzzy-based efficient control of DC microgrid configuration for PV-energized EV charging station. Energies 2023, 16, 2753. [Google Scholar] [CrossRef]
- Raj, P.J.; Prabhu, V.V.; Krishnakumar, V.; Anand, M.C.J. Solar Powered Charging of Fuzzy Logic Controller (FLC) Strategy with Battery Management System (BMS) Method Used for Electric Vehicle (EV). Int. J. Fuzzy Syst. 2023, 25, 2876–2888. [Google Scholar] [CrossRef]
- Ahmed, I.; Rehan, M.; Basit, A.; Tufail, M.; Hong, K.-S. Neuro-fuzzy and networks-based data driven model for multi-charging scenarios of plug-in-electric vehicles. IEEE Access 2023, 11, 87150–87165. [Google Scholar] [CrossRef]
- Faddel, S.; Mohamed, A.A.; Mohammed, O.A. Fuzzy logic-based autonomous controller for electric vehicles charging under different conditions in residential distribution systems. Electr. Power Syst. Res. 2017, 148, 48–58. [Google Scholar] [CrossRef]
- Viegas, M.; Costa, C. Fuzzy Logic Controllers for Charging/Discharging Management of Battery Electric Vehicles in a Smart Grid. J. Control. Autom. Electr. Syst. 2022, 32, 1214–1227. [Google Scholar] [CrossRef]
- Li, J.; Liu, Z.; Wang, X. Public charging station location determination for electric ride-hailing vehicles based on an improved genetic algorithm. Sustain. Cities Soc. 2021, 74, 103181. [Google Scholar] [CrossRef]
- Bandpey, M.F.; Firouzjah, K.G. Two-stage charging strategy of plug-in electric vehicles based on fuzzy control. Comput. Oper. Res. 2018, 96, 236–243. [Google Scholar] [CrossRef]
- Ronanki, D.; Kelkar, A.; Williamson, S.S. Extreme Fast Charging Technology—Prospects to Enhance Sustainable Electric Transportation. Energies 2019, 12, 3721. [Google Scholar] [CrossRef]
- SMohammed, A.Q.; Jung, J.-W. A Comprehensive State-of-the-Art Review of Wired/Wireless Charging Technologies for Battery Electric Vehicles: Classification/Common Topologies/Future Research Issues. IEEE Access 2019, 9, 19572–19585. [Google Scholar] [CrossRef]
- Ramanujam, A.; Sankaranarayanan, P.; Vasan, A.; Sarangan, V.; Sivasubramaniam, A. Qantifying The Impact of Electric Vehicles on The Electric Grid: A Simulation Based Case-Study. In Proceedings of the Eighth International Conference on Future Energy, New York, NY, USA, 16–19 May 2017. [Google Scholar]
- Rajesh, B.; Kumar, V.V. A Novel Fuzzy based Fast DC Charging for Electric Vehicle Charging Station. NeuroQuantology 2023, 21, 1–10. [Google Scholar]
- Ben Hazem, Z.; Fotuhi, M.J.; Bingul, Z. A Comparative Study of the Joint Neuro-Fuzzy Friction Models for a Triple Link Rotary Inverted Pendulum. IEEE Access 2020, 8, 49066–49078. [Google Scholar] [CrossRef]
- Bingül, Z.; Hazem, Z.B. A Comparative Study of Anti-Swing Radial Basis Neural-Fuzzy LQR Controller for Multi-Degree-of-Freedom Rotary Pendulum Systems. Neural Comput. Appl. 2023, 35, 17397–17413. [Google Scholar]
- Bayrak, G.; Yılmaz, A.; Çakmak, R. A new Fuzzy and Wavelet-Based Adaptive Thresholding Method for Detecting Pqds in a Hydrogen and Solar-Energy Powered EV Charging Station. Int. J. Hydrogen Energy 2023, 48, 6855–6870. [Google Scholar] [CrossRef]
- Deb, S.; Tammi, K.; Mahanta, P. Impact of electric vehicle charging station load on distribution network. Energies 2018, 11, 178. [Google Scholar] [CrossRef]
- Chen, C.; Xiao, T.; Qiu, T.; Lv, N.; Pei, Q. Smart-contract-based economical platooning in blockchain-enabled urban internet of vehicles. IEEE Trans. Ind. Inf. 2019, 16, 4122–4133. [Google Scholar] [CrossRef]
- Chen, H.; Zhang, Z.; Hu, Z.; Liang, Y.; Luo, H. Plug-in electric vehicle charging congestion analysis using taxi travel data in the central area of Beijing. arXiv 2017, arXiv:1712.07300. [Google Scholar]
- Deb, S.; Tammi, K.; Kalita, K.; Mahanta, P. Charging station placement for electric vehicles: A case study of guwahati city, India. IEEE Access 2019, 7, 100270–100282. [Google Scholar] [CrossRef]
- Liu, Z.; Wen, F.; Ledwich, G. Optimal Planning of Electric-Vehicle Charging Stations in Distribution Systems. IEEE Trans. Power Deliv. 2013, 28, 102–110. [Google Scholar] [CrossRef]
- Guler, N.; Salamah, M. ARCH: Adaptive Resource allocation for Cooperative transmission in Hybrid SWIPT-enabled Wireless Powered Sensor Networks. Eng. Sci. 2023, 25, 932. [Google Scholar] [CrossRef]
- Asfani, D.; Darmayanti, D.A.N.; Fahmi, D.; Prabowo, P.; Sidartha, I.; Wibawa, A.; Hapsara, I.; Sudaryono, S.; Dewantara, R.; Uman Putra, D.F. Optimal charging design and analysis for electric vehicles based on SOC and parking duration at charging stations using fuzzy logic based controllers. AIP Conf. Proc. 2024, 2838, 020030. [Google Scholar] [CrossRef]
- Samarji, N.; Salamah, M. A fault tolerance metaheuristic-based scheme for controller placement problem in wireless software-defined networks. Int. J. Commun. Syst. 2021, 34, e4624. [Google Scholar] [CrossRef]
- Samarji, N.; Salamah, M. ESRA: Energy soaring-based routing algorithm for IoT applications in software-defined wireless sensor networks. Egypt. Inform. J. 2021, 23, 215–224. [Google Scholar] [CrossRef]
- Samarji, N.; Salamah, M. ERQTM: Energy-Efficient Routing and QoS-Supported Traffic Management Scheme for SDWBANs. IEEE Sens. J. 2021, 21, 16328–16339. [Google Scholar] [CrossRef]
- Frendo, O.; Gaertner, N.; Stuckenschmidt, H. Improving Smart Charging Prioritization by Predicting Electric Vehicle Departure Time. IEEE Trans. Intell. Transp. Syst. 2020, 22, 6646–6653. [Google Scholar] [CrossRef]
- Chung, Y.-W.; Khaki, B.; Chu, T.L.C.; Gadh, R. Ensemble machine learning-based algorithm for electric vehicle user behavior prediction. Appl. Energy 2019, 254, 113732. [Google Scholar] [CrossRef]
- Islam, M.; Shareef, H.; Mohamed, A. Optimal location and sizing of fast charging stations for electric vehicles by incorporating traffic and power networks. IET Intell. Transp. Syst. 2018, 12, 947–957. [Google Scholar] [CrossRef]
- You, P.-S.; Hsieh, Y.-C. A hybrid heuristic approach to the problem of the location of vehicle charging stations. Comput. Ind. Eng. 2014, 70, 195–204. [Google Scholar] [CrossRef]
- Kou, L.; Liu, Z.; Zhou, H. Modeling algorithm of charging station planning for regional electric vehicle. Mod. Electr. Power 2010, 27, 44–48. [Google Scholar]
- Watson, N.; Watson, J.; Watson, R. Impact of electric vehicle chargers on a low voltage distribution system. In Proceedings of the EEA Conference Exhibition, Wellington, New Zealand, 24–26 June 2015. [Google Scholar]
- Teng, J.-H.; Chang, C.-Y. Backward/forward sweep-based harmonic analysis method for distribution systems. IEEE Trans. Power Deliv. 2007, 22, 1665–1672. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fuzzy Inputs | Fuzzy Outputs | |||
|---|---|---|---|---|
| Ne | SoC | De | ||
| S | S | S | S | S |
| S | S | M | S | S |
| S | S | H | S | S |
| S | M | M | S | M |
| S | H | H | S | M |
| S | M | H | S | M |
| S | H | M | S | M |
| S | M | S | S | M |
| S | H | S | M | M |
| M | M | M | M | M |
| M | M | S | M | M |
| M | M | H | M | M |
| M | S | S | M | M |
| M | H | H | M | M |
| M | H | S | M | M |
| M | S | H | M | M |
| M | S | M | M | M |
| M | H | M | M | M |
| H | H | H | H | H |
| H | H | S | H | H |
| H | H | M | H | M |
| H | S | S | H | S |
| H | M | M | H | M |
| H | M | S | H | S |
| H | S | M | H | M |
| H | S | H | H | M |
| H | M | H | H | H |
| Fuzzy Linguistic Variables | Range of Input Variables | Range of Output Variables | |||
|---|---|---|---|---|---|
| Ne | (%) | SoC (%) | De (min) | ||
| S | [1–440] | [0.01–0.40] | [20–40] | [3–5.8] | [8–23] |
| M | [300–700] | [0.30–0.65] | [35–55] | [5–7.2] | [20–30] |
| H | [550–1000] | [0.55–0.99] | [45–85] | [6.6–10] | [28–45] |
| Fuzzy Linguistic Variables | Range of Input Variables | Range of Output Variables | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Ne | SoC | De | ||||||||
| UMF | LMF | UMF | LMF | UMF | LMF | UMF | LMF | UMF | LMF | |
| S | [0–500] | [0–400] | [0–0.50] | [0–0.37] | [20–50] | [20–42] | [0–6.2] | [0–5.5] | [0–23] | [0–21] |
| M | [220–800] | [380–680] | [0.20–0.78] | [0.3–0.62] | [38–68] | [41–60] | [4.3–7.9] | [5–7.5] | [18–33] | [20–29] |
| H | [500–1000] | [620–1000] | [0.4–1] | [0.58–1] | [50–100] | [55–100] | [6.2–10] | [7–10] | [25–45] | [27–45] |
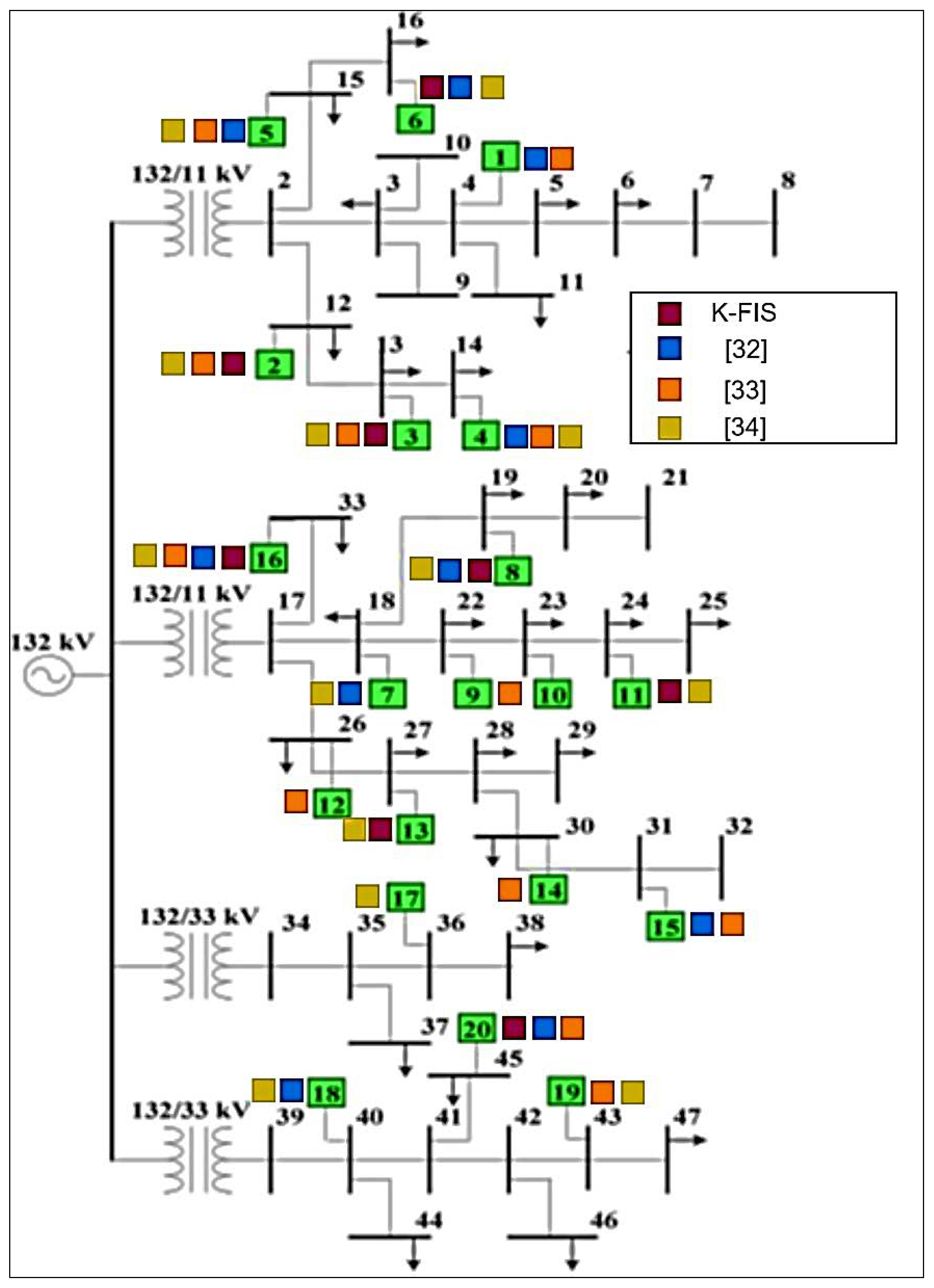
| Scheme | No. of FCs | Avg. Charging Time (min) | Avg. Load (No. of EVs) |
|---|---|---|---|
| Proposed K-FIS | 8 | 18.25 | 125 |
| [32] | 10 | 18.17 | 100 |
| [33] | 12 | 18.16 | 84 |
| [34] | 13 | 18.12 | 77 |
| Parameter | Value |
|---|---|
| Number of EVs | 1000 |
| EV maximum battery capacity | 50 kW |
| Maximum charging time | 50 min |
| Battery discharge rate | 5.28 kW |
| Maximum number of FCS | 20 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guler, N.; Ben Hazem, Z. A K-Additive Fuzzy Logic Approach for Optimizing FCS Sizing and Enhanced User Satisfaction. World Electr. Veh. J. 2024, 15, 150. https://doi.org/10.3390/wevj15040150
Guler N, Ben Hazem Z. A K-Additive Fuzzy Logic Approach for Optimizing FCS Sizing and Enhanced User Satisfaction. World Electric Vehicle Journal. 2024; 15(4):150. https://doi.org/10.3390/wevj15040150
Chicago/Turabian StyleGuler, Nivine, and Zied Ben Hazem. 2024. "A K-Additive Fuzzy Logic Approach for Optimizing FCS Sizing and Enhanced User Satisfaction" World Electric Vehicle Journal 15, no. 4: 150. https://doi.org/10.3390/wevj15040150
APA StyleGuler, N., & Ben Hazem, Z. (2024). A K-Additive Fuzzy Logic Approach for Optimizing FCS Sizing and Enhanced User Satisfaction. World Electric Vehicle Journal, 15(4), 150. https://doi.org/10.3390/wevj15040150