
Second-Order Central Difference Particle Filter Algorithm for State of Charge Estimation in Lithium-Ion Batteries



Abstract
1. Introduction
- An Innovative Algorithm: We apply the SCDPF algorithm to lithium battery SOC estimation for the first time. In contrast to traditional particle filtering (PF) methods, the SCDPF algorithm utilizes Second-order Central Difference Kalman Filtering (SCDKF) as the importance density function to generate optimized particles, effectively addressing the particle degeneracy issue inherent in traditional PF approaches.
- Accuracy Enhancement: By employing improved importance density functions and central difference methods, the SCDPF algorithm significantly enhances SOC estimation accuracy.
- Robustness Enhancement: We incorporate the handling of Gaussian and non-Gaussian noise within the algorithm, verifying its robustness by introducing noise into the battery current and voltage signals. The results indicate that the SCDPF algorithm maintains a high estimation accuracy under the influence of noise, particularly demonstrating a better robustness than existing methods under non-Gaussian noise conditions.
- Experimental Validation: Experimental validation is conducted under different temperature conditions, including 25 °C and 0 °C, demonstrating not only the effectiveness of the algorithm but also its applicability and stability under various temperature conditions.
2. Battery Model and Parameter Identification
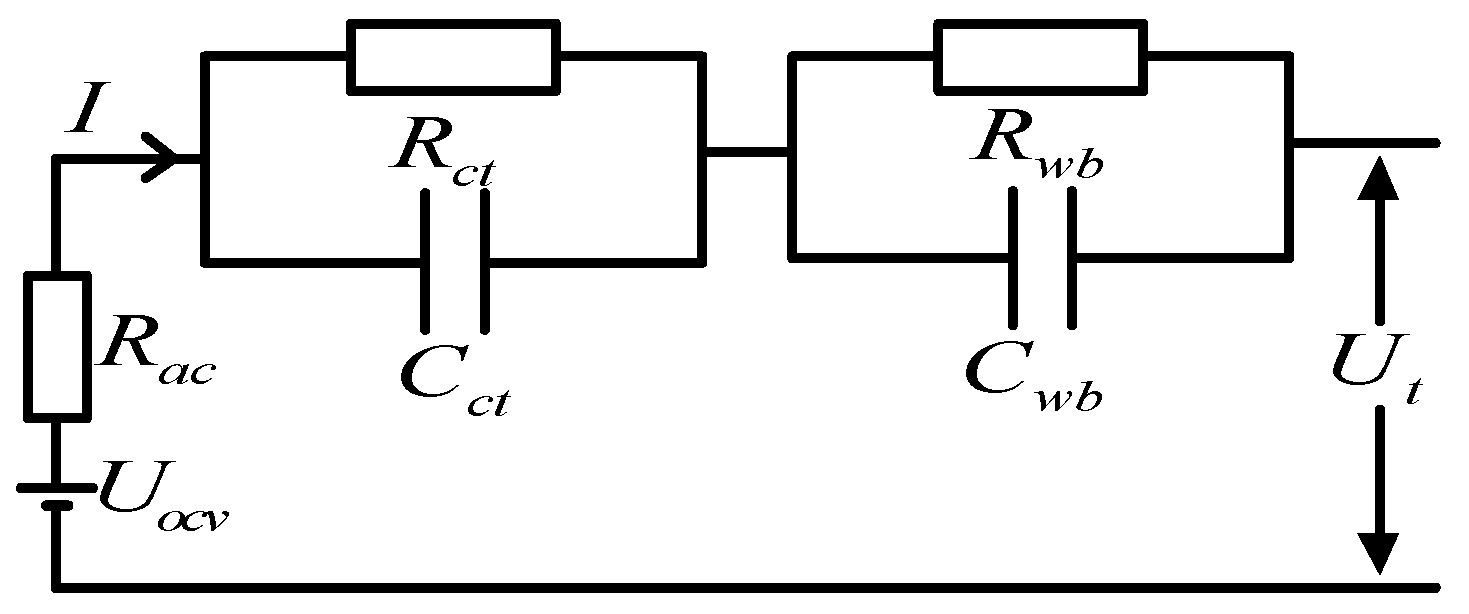
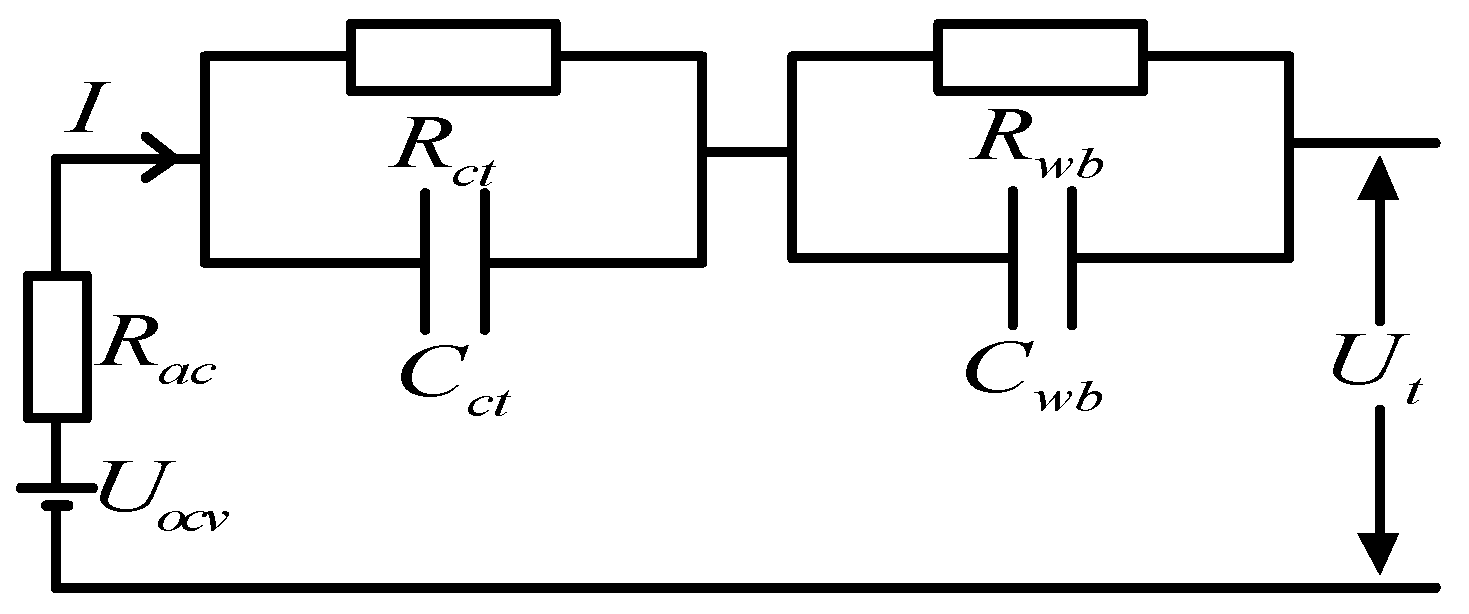
2.1. Equivalent Circuit Model of Second-Order RC
2.2. Parameter Identification of Battery Model
3. SOC Estimation Algorithm Based on Improved PF
- Initialization: By using Cholesky decomposition, some operators are calculated using the following equation:
- 2.
- Forecast: The one-step predictions xpi(k) can be calculated using the following formula:
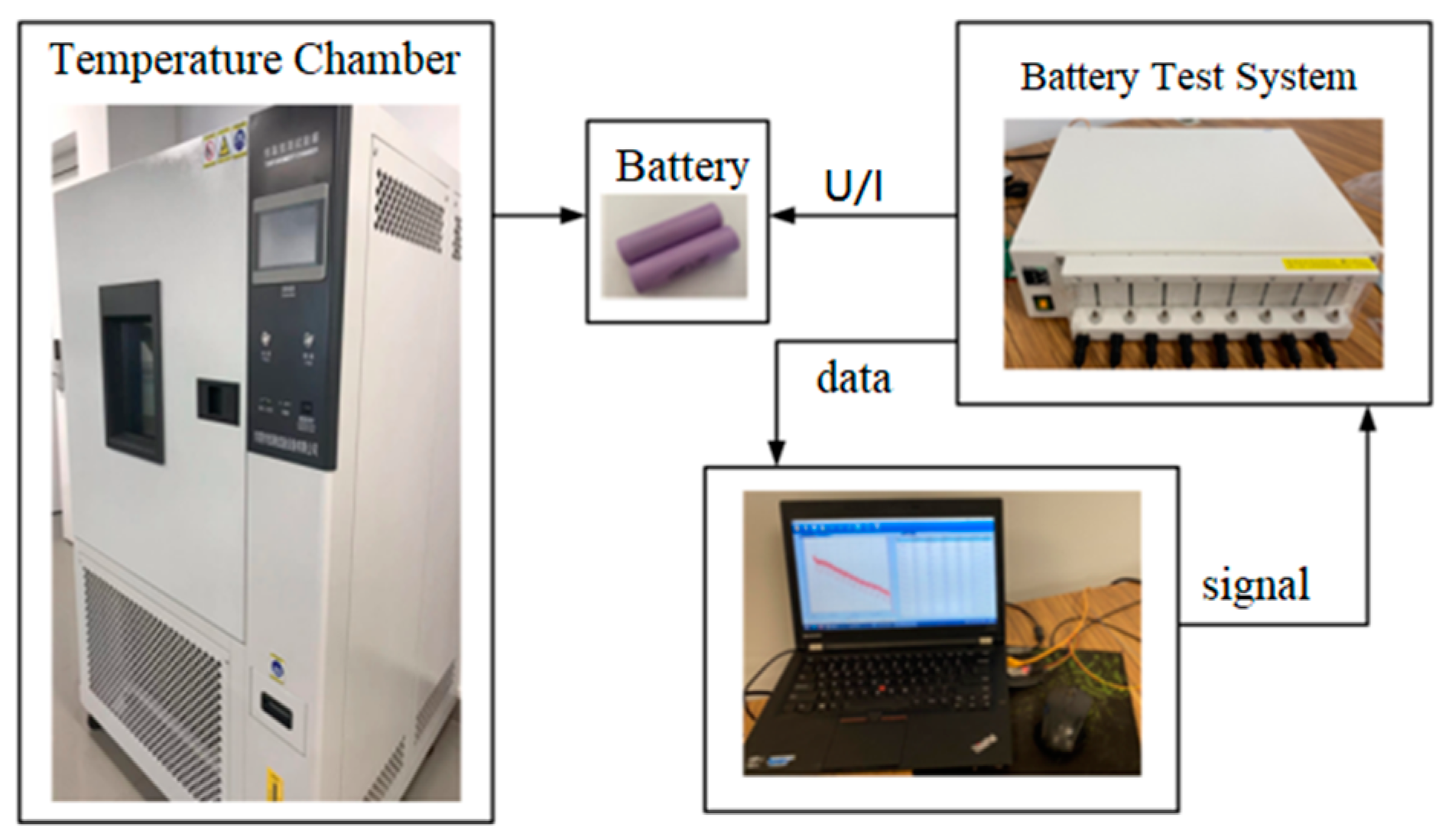
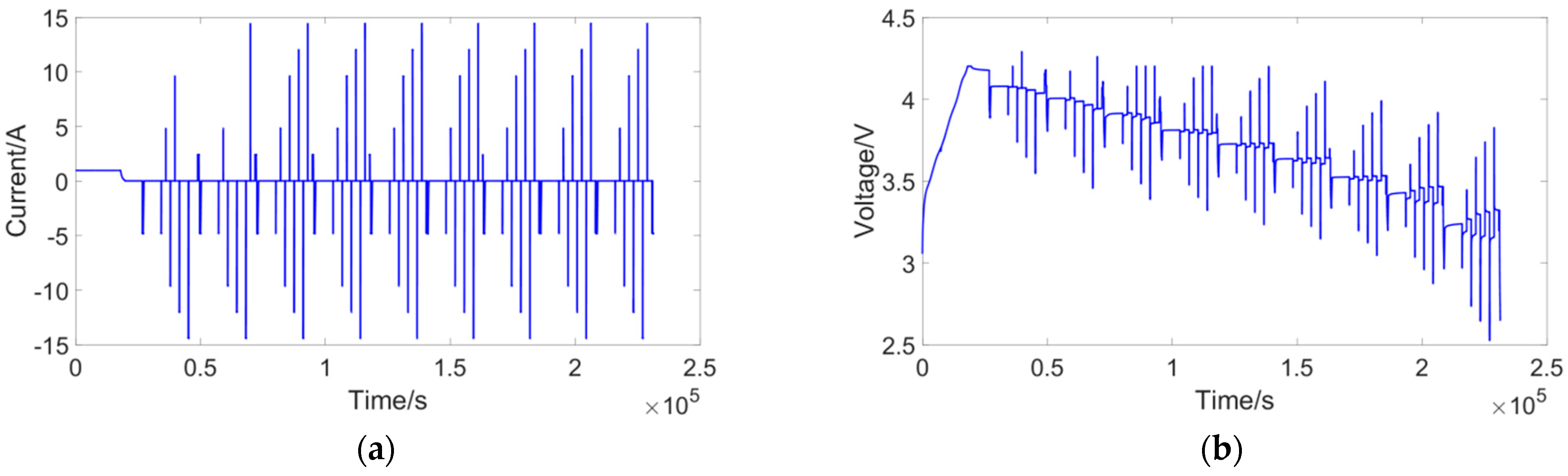
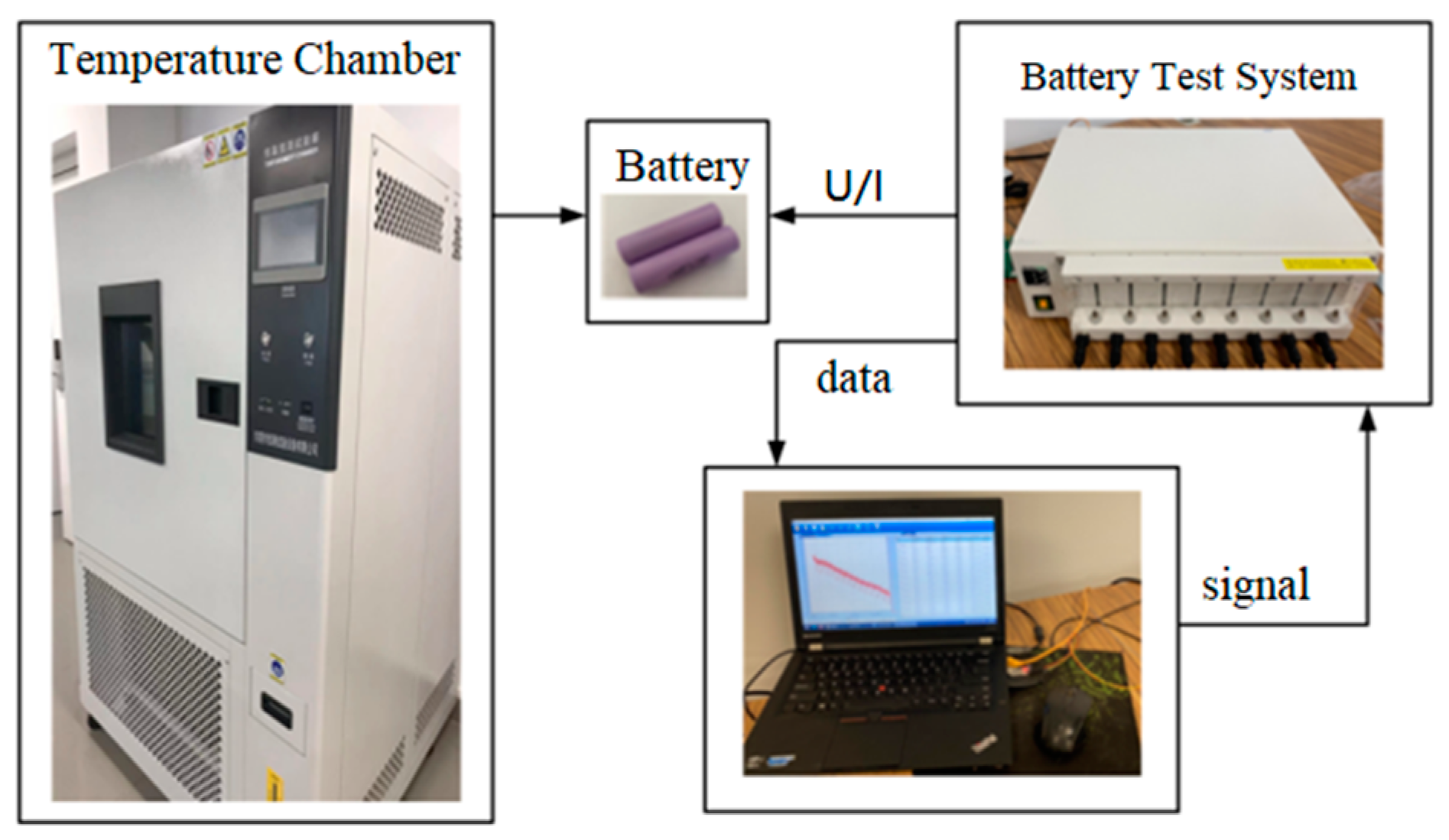
4. Experiment and Simulation Analysis
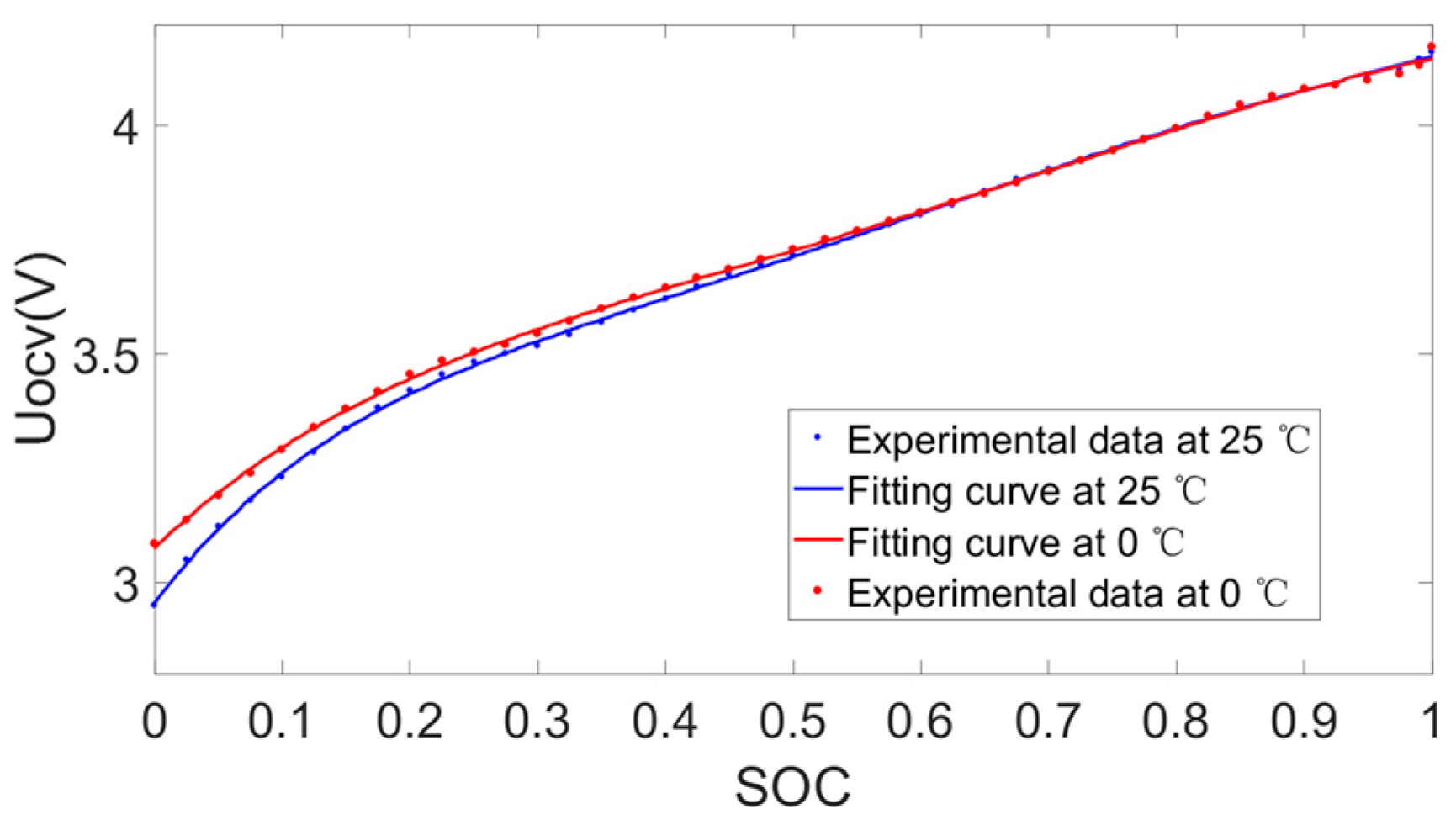
4.1. Parameter Identification
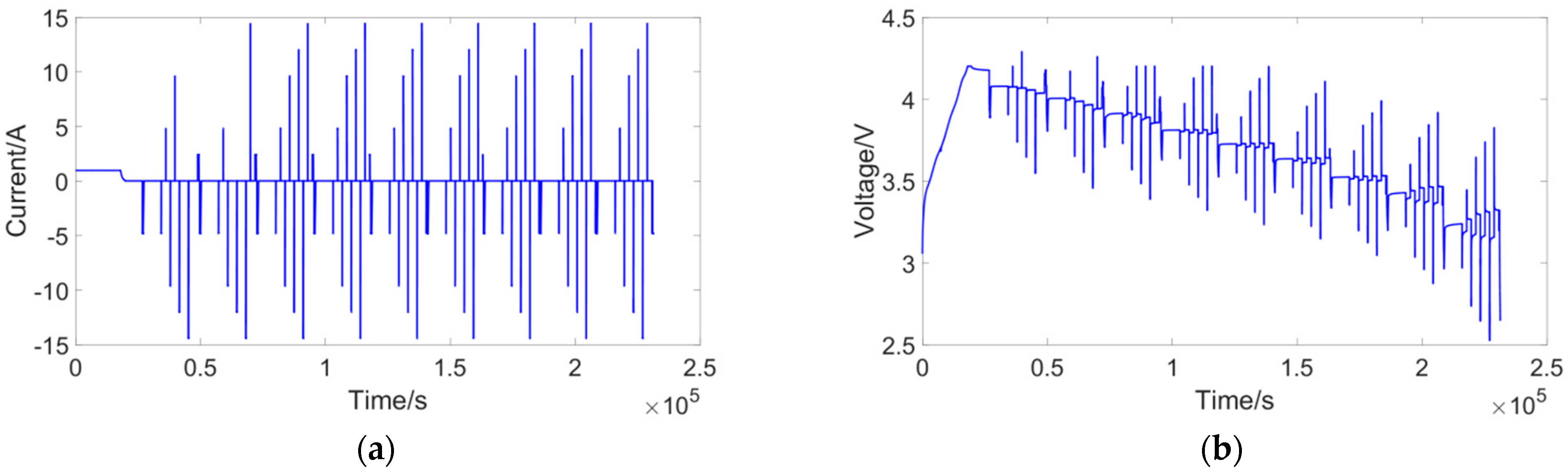
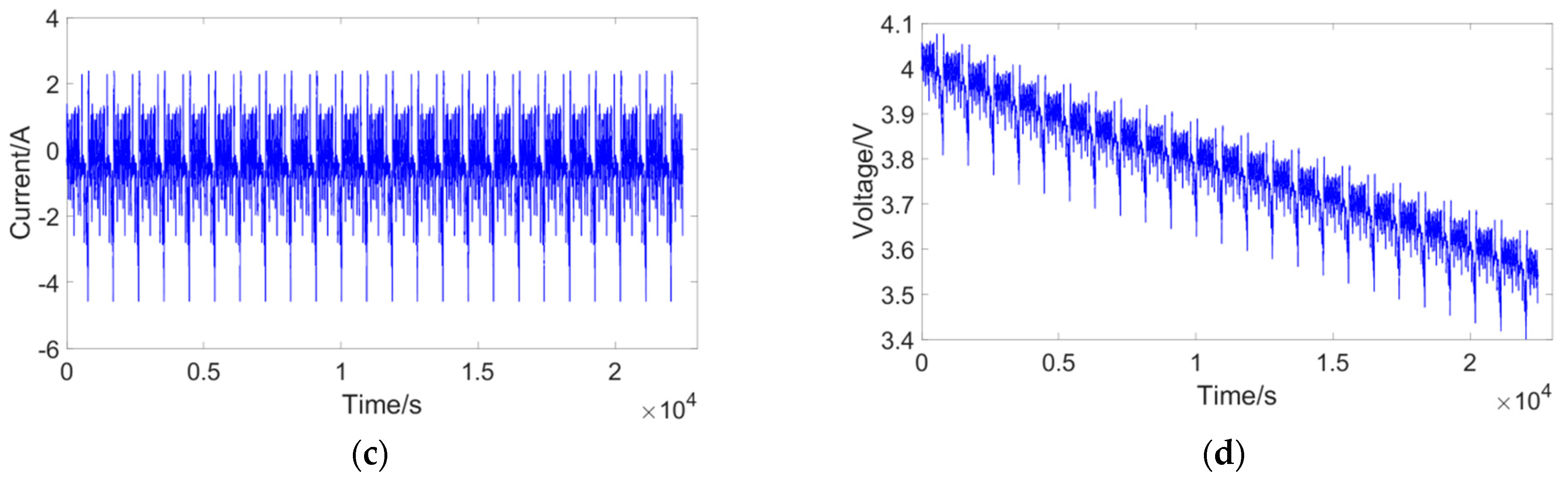
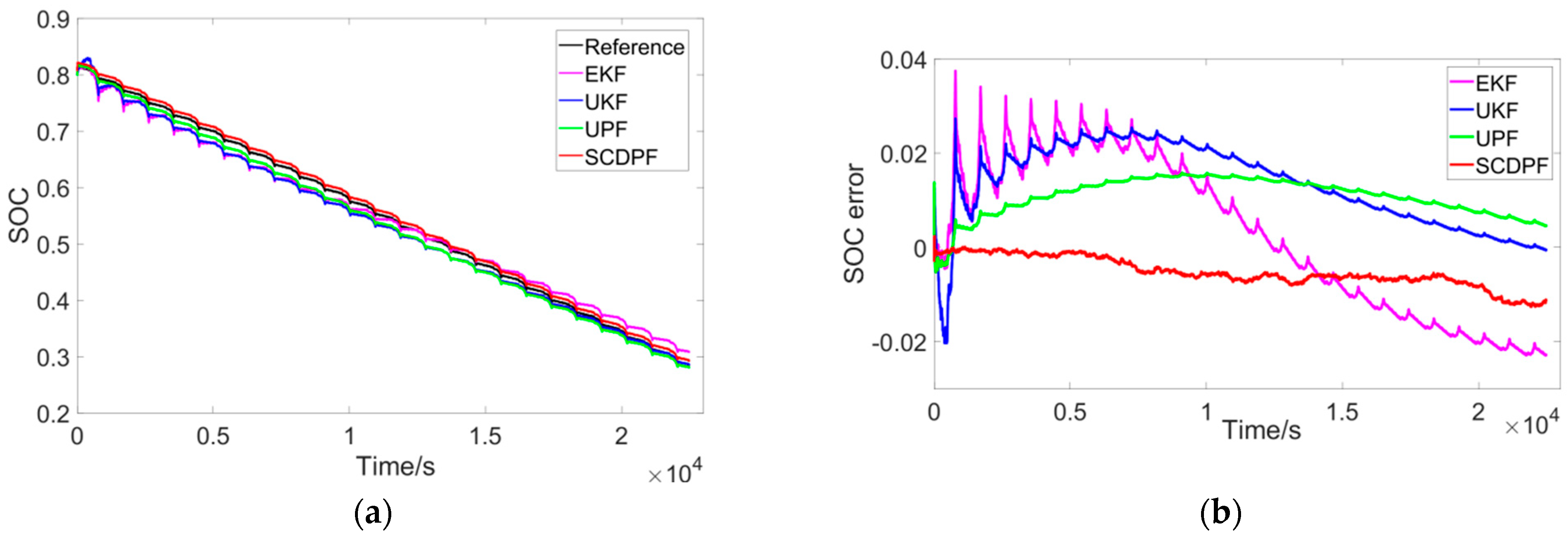
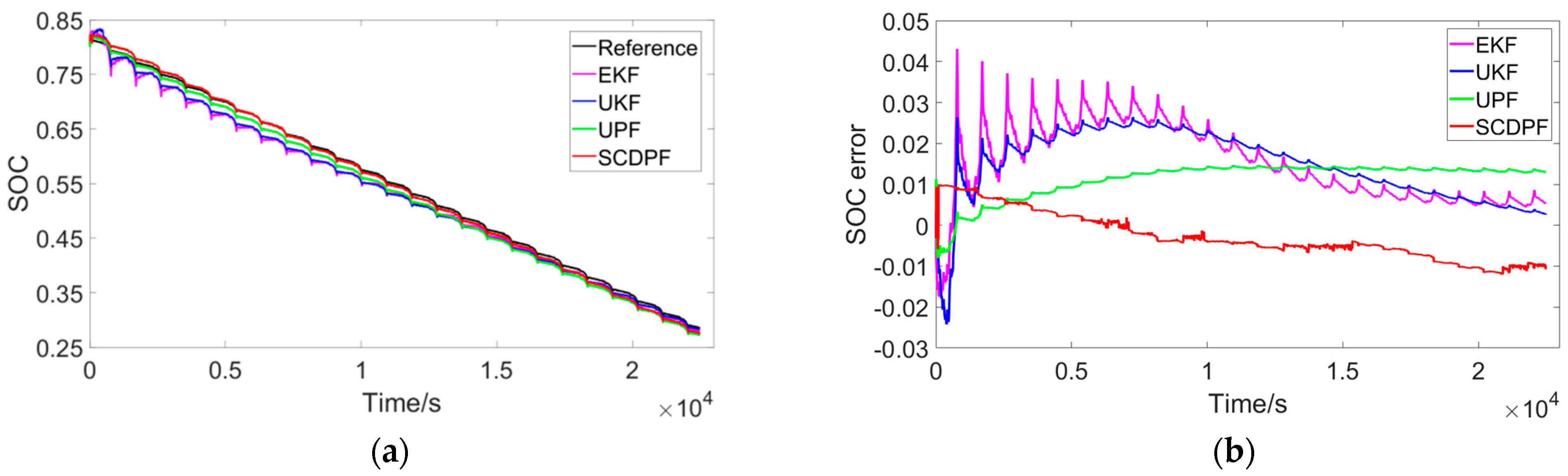
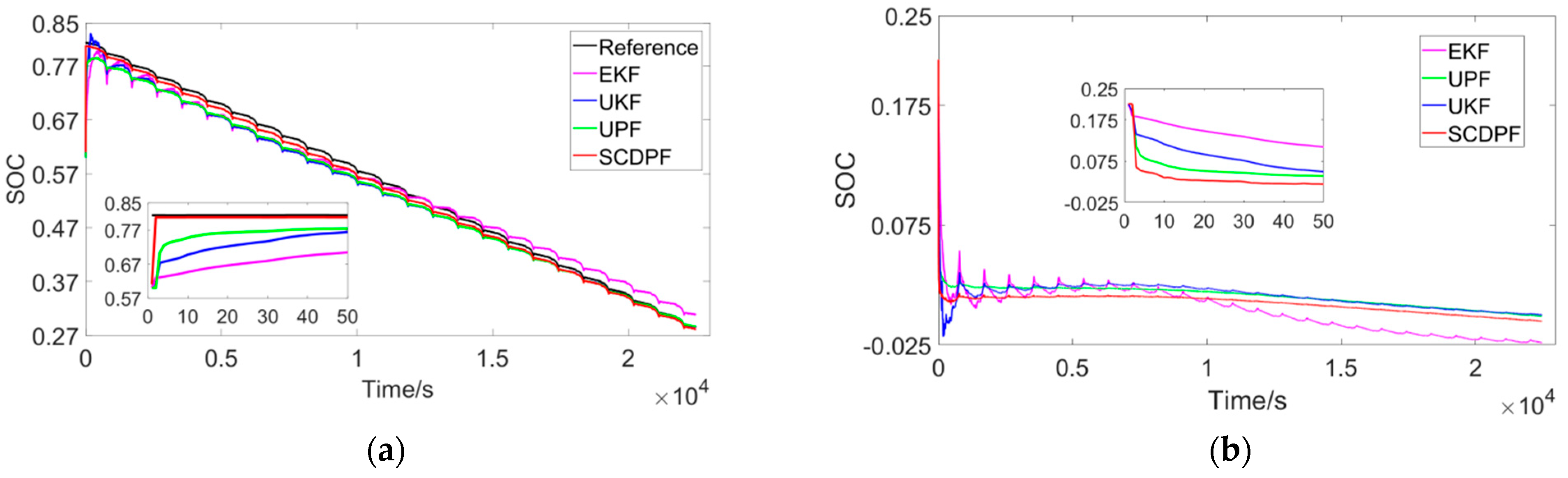
4.2. Algorithm Simulation Analysis of Accuracy and Convergence
4.3. Algorithm Simulation Analysis of Robustness
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Li, X.; Yuan, C.; Wang, Z.; Xie, J. A data-fusion framework for lithium battery health condition Estimation Based on differential thermal voltammetry. Energy 2022, 239, 122206. [Google Scholar] [CrossRef]
- Wang, D.; Kong, J.Z.; Yang, F.; Zhao, Y.; Tsui, K.L. Battery prognostics at different operating conditions. Measurement 2020, 151, 107182. [Google Scholar] [CrossRef]
- Yang, B.; Wang, J.; Cao, P.; Zhu, T.; Shu, H.; Chen, J.; Zhang, J.; Zhu, J. Classification, summarization and perspectiveson state-of-charge estimation of lithium-ion batteries used in electric vehicles: A critical comprehensive survey. J. Energy Storage 2021, 39, 102572. [Google Scholar] [CrossRef]
- Yu, K.; Wang, H.; Mao, L.; He, Q.; Wu, Q. IC Curve-Based Lithium-Ion Battery SOC Estimation at High Rate Charging Current. IEEE Trans. Instrum. Meas. 2022, 71, 3160554. [Google Scholar] [CrossRef]
- Ren, Z.; Du, C.; Wu, Z.; Shao, J.; Deng, W. A comparative study of the influence of different open circuit voltage tests on model-based state of charge estimation for lithium-ion batteries. Int. J. Energy Res. 2021, 45, 13692–13711. [Google Scholar] [CrossRef]
- Liu, Z.; Li, Z.; Zhang, J.; Su, L.; Ge, H. Accurate and Efficient Estimation of Lithium-Ion Battery State of Charge with Alternate Adaptive Extended Kalman Filter and Ampere-Hour Counting Methods. Energies 2019, 12, 757. [Google Scholar] [CrossRef]
- Lai, X.; Wang, S.; Ma, S.; Xie, J.; Zheng, Y. Parameter sensitivity analysis and simplification of equivalent circuit model for the state of charge of lithium-ion batteries. Electrochim. Acta 2020, 330, 135239. [Google Scholar] [CrossRef]
- Lai, X.; Wang, S.; He, L.; Zhou, L.; Zheng, Y. A hybrid state-of-charge estimation method based on credible increment for electric vehicle applications with large sensor and model errors. J. Energy Storage 2020, 27, 101106. [Google Scholar] [CrossRef]
- Xiong, R.; Tian, J.; Shen, W.; Sun, F. A Novel Fractional Order Model for State of Charge Estimation in Lithium-ion Batteries. IEEE Trans. Veh. Technol. 2019, 68, 4130–4139. [Google Scholar] [CrossRef]
- Pang, H.; Mou, L.J.; Guo, L. Parameter identification and state-of-charge estimation approach for enhanced lithium-ion battery equivalent circuit model considering influence of ambient temperatures. Chin. Phys. B 2019, 28, 108021. [Google Scholar] [CrossRef]
- Nguyen, T.T.; Khan, A.B.; Ko, Y.; Choi, W. An Accurate State of Charge Estimation Method for Lithium Iron Phosphate Battery Using a Combination of an Unscented Kalman Filter and a Particle Filter. Energies 2020, 13, 4536. [Google Scholar] [CrossRef]
- Xu, W.; Xu, J.; Yan, X. Lithium-ion battery state of charge and parameters joint estimation using cubature Kalman filter and particle filter. J. Power Electron. 2020, 20, 292–307. [Google Scholar] [CrossRef]
- Yu, J. State-of-Health Monitoring and Prediction of Lithium-Ion Battery Using Probabilistic Indication and State-Space Model. IEEE Trans. Instrum. Meas. 2015, 64, 2937–2949. [Google Scholar] [CrossRef]
- Zheng, L.; Zhu, J.; Wang, G.; Lu, D.D.C.; He, T. Differential voltage analysis based state of charge estimation methods for lithium-ion batteries using extended Kalman filter and particle filter. Energy 2018, 158, 1028–1037. [Google Scholar] [CrossRef]
- Feng, F.; Teng, S.; Liu, K.; Xie, J.; Xie, Y.; Liu, B.; Li, K. Co-estimation of lithium-ion battery state of charge and state of temperature based on a hybrid electrochemical-thermal-neural-network model. J. Power Sources 2020, 455, 227935. [Google Scholar] [CrossRef]
- Stiasny, J.; Misyris, G.S.; Chatzivasileiadis, S. Physics-Informed Neural Networks for Non-linear System Identification for Power 78 System Dynamics. In Proceedings of the 2021 IEEE Madrid Powertech, Madrid, Spain, 28 June–2 July 2021. [Google Scholar] [CrossRef]
- Cheng, G.; Wang, X.; He, Y. Remaining useful life and state of health prediction for lithium batteries based on empiri-cal mode decomposition and a long and short memory neural network. Energy 2021, 232, 121022. [Google Scholar] [CrossRef]
- Song, Q.; Wang, S.; Xu, W.; Shao, Y.; Fernandez, C. A Novel Joint Support Vector Machine—Cubature Kalman Filteri-ng Method for Adaptive State of Charge Prediction of Lithium-Ion Batteries. Int. J. Electroch. Sci. 2021, 16, 210823. [Google Scholar] [CrossRef]
- Song, Y.; Liu, D.; Liao, H.; Peng, Y. A hybrid statistical data-driven method for on-line joint state estimation of lithium-ion batteries. Appl. Energy 2020, 261, 114408. [Google Scholar] [CrossRef]
- Li, Y.; Xiong, B.; Vilathgamuwa, D.M.; Wei, Z.; Xie, C.; Zou, C. Constrained Ensemble Kalman Filter for Distributed Electrochemical State Estimation of Lithium-Ion Batteries. IEEE Trans. Ind. Inform. 2021, 17, 240–250. [Google Scholar] [CrossRef]
- Li, Y.; Wei, Z.; Xiong, B.; Vilathgamuwa, D.M. Adaptive Ensemble-Based Electrochemical-Thermal Degradation State E-stimation of Lithium-Ion Batteries. IEEE Trans. Ind. Electron. 2022, 69, 6984–6996. [Google Scholar] [CrossRef]
- Sihvo, J.; Roinila, T.; Stroe, D.I. Novel Fitting Algorithm for Parametrization of Equivalent Circuit Model of Li-Ion Batt-ery From Broadband Impedance Measurements. IEEE Trans. Ind. Electron. 2021, 68, 4916–4926. [Google Scholar] [CrossRef]
- Wang, D.; Li, X.; Wang, J.; Zhang, Q.; Yang, B.; Hao, Z. Lithium-ion battery equivalent model over full-range state of charge based on electrochemical process simplification. Electrochim. Acta 2021, 389, 138698. [Google Scholar] [CrossRef]
- He, H.; Xiong, R.; Zhang, X.; Sun, F.; Fan, J. State-of-Charge Estimation of the Lithium-Ion Battery Using an Adaptive Extended Kalman Filter Based on an Improved Thevenin Model. IEEE Trans. Veh. Technol. 2011, 60, 1461–1469. [Google Scholar] [CrossRef]
- Havangi, R. Adaptive robust unscented Kalman filter with recursive least square for state of charge estimation of batteries. Electr. Eng. 2022, 104, 1001–1017. [Google Scholar] [CrossRef]
- Shateri, N.; Shi, Z.; Auger, D.J.; Fotouhi, A. Lithium-Sulfur Cell State of Charge Estimation Using a Classification Technique. IEEE Trans. Veh. Technol. 2021, 70, 212–224. [Google Scholar] [CrossRef]
- Meng, B.; Wang, Y.; Mao, J.; Liu, J.; Xu, G.; Dai, J. Using SoC Online Correction Method Based on Parameter Identific-ation to Optimize the Operation Range of NI-MH Battery for Electric Boat. Energies 2018, 11, 586. [Google Scholar] [CrossRef]
- Kalogiannis, T.; Hosen, M.S.; Sokkeh, M.A.; Goutam, S.; Jaguemont, J.; Jin, L.; Qiao, G.; Berecibar, M.; Van Mierlo, J. Comparative Study on Parameter Identification Methods for Dual-Polarization Lithium-Ion Equivalent Circuit Model. Energies 2019, 12, 4031. [Google Scholar] [CrossRef]
- Bian, X.; Wei, Z.; He, J.; Yan, F.; Liu, L. A Two-Step Parameter Optimization Method for Low-Order Model-Based Stat-e-of-Charge Estimation. IEEE Trans. Transp. Electrif. 2021, 7, 399–409. [Google Scholar] [CrossRef]
- Pavkovic, D.; Krznar, M.; Komljenovic, A.; Hrgetic, M.; Zorc, D. Dual EKF-Based State and Parameter Estimator for a LiFePO4 Battery Cell. J. Power Electron. 2017, 17, 398–410. [Google Scholar] [CrossRef]
- Zhang, G.; Xia, B.; Wang, J. Intelligent state of charge estimation of lithium-ion batteries based on L-M optimized back-propagation neural network. J. Energy Storage 2021, 44, 103442. [Google Scholar] [CrossRef]
- Lai, X.; Gao, W.; Zheng, Y.; Ouyang, M.; Li, J.; Han, X.; Zhou, L. A comparative study of global optimization methodsfor parameter identification of different equivalent circuit models for Li-ion batteries. Electrochim. Acta 2019, 295, 1057–1066. [Google Scholar] [CrossRef]
- Ren, B.; Xie, C.; Sun, X.; Zhang, Q.; Yan, D. Parameter identification of a lithium-ion battery based on the improved r-ecursive least square algorithm. IET Power Electron. 2020, 13, 2531–2537. [Google Scholar] [CrossRef]
- Kalman, R.E. A New Approach to Linear Filtering and Prediction Problems. J. Basic Eng. 1960, 82D, 35–45. [Google Scholar] [CrossRef]
- Sunahara, Y.; Yamashita, K. An Approximate Method of State Estimation for Nonlinear Dynamical Systems. Int. J. Control. 1970, 11, 957–972. [Google Scholar] [CrossRef]
- Merwe, R.; Wan, E. Sigma-Point Kalman Filters for Probabilistic Inference in Dynamic State-Space Models. In Proceedings of the 2003 IEEE International Conference on Acoustics, Speech, and Signal Processing, Hong Kong, China, 1–6 April 2003. [Google Scholar]
- Wang, Y.; Cheng, Y.; Xiong, Y.; Yan, Q. Estimation of battery open-circuit voltage and state of charge based on dynamic matrix control-extended Kalman filter algorithm. J. Energy Storage 2022, 52, 104860. [Google Scholar] [CrossRef]
- Zhou, Z.; Zhang, C. An Extended Kalman Filter Design for State-of-Charge Estimation Based on Variational Approach. Batteries 2023, 9, 583. [Google Scholar] [CrossRef]
- Maheshwari, A.; Nageswari, S. Real-time state of charge estimation for electric vehicle power batteries using optimized filter. Energy 2022, 254, 124328. [Google Scholar] [CrossRef]
- Wang, L.; Ma, J.; Zhao, X.; Li, X.; Zhang, K.; Jiao, Z. Adaptive robust unscented Kalman filter-based state-of-charge estimation for lithium-ion batteries with multi-parameter updating. Electrochim. Acta 2022, 426, 140760. [Google Scholar] [CrossRef]
- Xing, J.; Wu, P. State of Charge Estimation of Lithium-Ion Battery Based on Improved Adaptive Unscented Kalman Filter. Sustainability 2021, 13, 5046. [Google Scholar] [CrossRef]
- Chen, L.; Wang, S.; Jiang, H.; Fernandez, C.; Zou, C. Decreasing Weight Particle Swarm Optimization Combined with Unscented Particle Filter for the Non-Linear Model for Lithium Battery State of Charge Estimation. Int. J. Electrochem. Sci. 2020, 15, 10104–10116. [Google Scholar] [CrossRef]
- Zhang, Z.; Huang, W.; Liao, Y.; Song, Z.; Shi, J.; Jiang, X.; Shen, C.; Zhu, Z. Bearing fault diagnosis via generalized lo-garithm sparse regularization. Mech. Syst. Signal Process. 2022, 167, 108576. [Google Scholar] [CrossRef]
- El Mejdoubi, A.; Chaoui, H.; Gualous, H.; Van den Bossche, P.; Omar, N.; Van Mierlo, J. Lithium-Ion Batteries Health Prognosis Considering Aging Conditions. IEEE Trans. Power Electron. 2019, 34, 6834–6844. [Google Scholar] [CrossRef]
- Xu, W.; Xu, J.; Liu, B.; Liu, J.; Yan, X. A multi-timescale adaptive dual particle filter for state of charge estimation of lithium-ion batteries considering temperature effect. Energy Sci. Eng. 2020, 8, 2784–2798. [Google Scholar] [CrossRef]
- Jiahui, D.; Xiaobo, L.; Kequan, W.; Yunpei, L. A novel STSOSLAM algorithm based on strong tracking second order c-entral difference Kalman filter. Robot. Auton. Syst. 2019, 116, 114–125. [Google Scholar] [CrossRef]
- Hao, X.; Wang, S.; Fan, Y.; Xie, Y.; Fernandez, C. An improved forgetting factor recursive least square and unscented particle filtering algorithm for accurate lithium-ion battery state of charge estimation. J. Energy Storage 2023, 59, 106478. [Google Scholar] [CrossRef]
- Wang, Q.; Sun, C.; Gu, Y. Research on SOC estimation method of hybrid electric vehicles battery based on the grey wolf optimized particle filter. Comput. Electr. Eng. 2023, 110, 108907. [Google Scholar] [CrossRef]
- Chen, Y.; He, Y.; Li, Z.; Chen, L.; Zhang, C. Remaining Useful Life Prediction and State of Health Diagnosis of Lithiu-m-Ion Battery Based on Second-Order Central Difference Particle Filter. IEEE Access 2020, 8, 37305–37313. [Google Scholar] [CrossRef]
- Chen, Z.; Fu, Y.; Mi, C.C. State of Charge Estimation of Lithium-Ion Batteries in Electric Drive Vehicles Using Extend-ed Kalman Filtering. IEEE Trans. Veh. Technol. 2013, 62, 1020–1030. [Google Scholar] [CrossRef]
- He, W.; Williard, N.; Chen, C.; Pecht, M. State of charge estimation for electric vehicle batteries using unscented kalm-an filtering. Microelectron. Reliab. 2013, 53, 840–847. [Google Scholar] [CrossRef]
- Liu, F.; Ma, J.; Su, W. Unscented Particle Filter for SOC Estimation Algorithm Based on a Dynamic Parameter Identification. Math. Probl. Eng. 2019, 2019, 1265930. [Google Scholar] [CrossRef]
- Su, L.; Zhou, G.; Hu, D.; Liu, Y.; Zhu, Y. Research on the State of Charge of Lithium-Ion Battery Based on the Fractional Order Model. Energies 2021, 14, 6307. [Google Scholar] [CrossRef]
- Ye, Y.; Li, Z.; Lin, J.; Wang, X. State-of-charge estimation with adaptive extended Kalman filter and extended stochastic gradient algorithm for lithium-ion batteries. J. Energy Storage 2022, 47, 103611. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SOC | Rac (0 °C/5 °C) | Rct (0 °C/5 °C) | Rwb (0 °C/5 °C) | Cct (0 °C/5 °C) | Cwb (0 °C/5 °C) |
|---|---|---|---|---|---|
| 0.1 | (55.3/30.2) | (4/1) | (18.3/12.1) | (109.1/594.8) | (4989.2/1824.9) |
| 0.2 | (51.4/26.9) | (3.69/0.77) | (11.9/8.6) | (188.6/796.2) | (6232.4/2185.2) |
| 0.3 | (47.8/25.9) | (3.71/1.2) | (9.2/3.9) | (175.3/465.7) | (9358.4/3040.5) |
| 0.4 | (46.9/26.2) | (3.75/0.87) | (9.5/3.9) | (160.5/711) | (7201.9/2385.3) |
| 0.5 | (45.6/26.5) | (5.21/0.76) | (9.7/4) | (98.1/818.4) | (6340.5/2042.7) |
| 0.6 | (46.3/26.1) | (3.78/0.84) | (11.1/4.5) | (181.3/719.6) | (6430.2/2677.3) |
| 0.7 | (49.6/25.1) | (3.8/1.2) | (8.8/39.5) | (190.4/489.1) | (8000/4551.5) |
| 0.8 | (42.7/24.6) | (6.1/2.4) | (11.6/15.3) | (61.2/219) | (3580.2/6131.2) |
| 0.9 | (47.8/25.7) | (3.2/2.1) | (9.1/2.9) | (185.3/286.1) | (5980/12045) |
| Algorithms | MAE | RMSE | MAPE |
|---|---|---|---|
| EKF (50) | 0.0152 | 0.0169 | 2.614% |
| UKF (51) | 0.0134 | 0.0156 | 2.571% |
| UPF (52) | 0.0109 | 0.0115 | 1.856% |
| SCDPF | 0.0053 | 0.0061 | 0.752% |
| Algorithms | MAE | RMSE | MAPE |
|---|---|---|---|
| EKF (50) | 0.0157 | 0.0179 | 2.939% |
| UKF (51) | 0.0155 | 0.0170 | 2.831% |
| UPF (52) | 0.0116 | 0.0122 | 1.841% |
| SCDPF | 0.0056 | 0.0063 | 0.882% |
| Algorithms | RMSE |
|---|---|
| [53] | 0.94% |
| [54] | 0.79% |
| SOC Estimation Algorithm | Error | Noise 1 | Noise 3 | |
|---|---|---|---|---|
| EKF | Case1 | MAE (%) | 1.5339 | 1.6817 |
| RMSE (%) | 1.6999 | 1.8448 | ||
| Case2 | MAE (%) | 2.1102 | 3.7297 | |
| RMSE (%) | 2.615 | 4.1243 | ||
| UKF | Case1 | MAE (%) | 1.4181 | 1.6922 |
| RMSE (%) | 1.6561 | 1.8434 | ||
| Case2 | MAE (%) | 1.7935 | 2.712 | |
| RMSE (%) | 1.9762 | 2.8421 | ||
| UPF | Case1 | MAE (%) | 1.2729 | 1.3698 |
| RMSE (%) | 1.3169 | 1.4349 | ||
| Case2 | MAE (%) | 1.6600 | 2.1154 | |
| RMSE (%) | 1.7049 | 2.0803 | ||
| SCDPF | Case1 | MAE (%) | 0.65687 | 0.70558 |
| RMSE (%) | 0.74745 | 0.76395 | ||
| Case2 | MAE (%) | 1.0007 | 1.104 | |
| RMSE (%) | 1.0489 | 1.1954 | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Y.; Huang, X. Second-Order Central Difference Particle Filter Algorithm for State of Charge Estimation in Lithium-Ion Batteries. World Electr. Veh. J. 2024, 15, 152. https://doi.org/10.3390/wevj15040152
Chen Y, Huang X. Second-Order Central Difference Particle Filter Algorithm for State of Charge Estimation in Lithium-Ion Batteries. World Electric Vehicle Journal. 2024; 15(4):152. https://doi.org/10.3390/wevj15040152
Chicago/Turabian StyleChen, Yuan, and Xiaohe Huang. 2024. "Second-Order Central Difference Particle Filter Algorithm for State of Charge Estimation in Lithium-Ion Batteries" World Electric Vehicle Journal 15, no. 4: 152. https://doi.org/10.3390/wevj15040152
APA StyleChen, Y., & Huang, X. (2024). Second-Order Central Difference Particle Filter Algorithm for State of Charge Estimation in Lithium-Ion Batteries. World Electric Vehicle Journal, 15(4), 152. https://doi.org/10.3390/wevj15040152