

Optimal Allocation of Fast Charging Stations on Real Power Transmission Network with Penetration of Renewable Energy Plant



Abstract
1. Introduction
- A novel approach that incorporates the effective and straightforward Red-Tailed Hawk Algorithm (RTH) is proposed to identify optimal locations and capacities for FCSs in a real transmission network containing a PV plant.
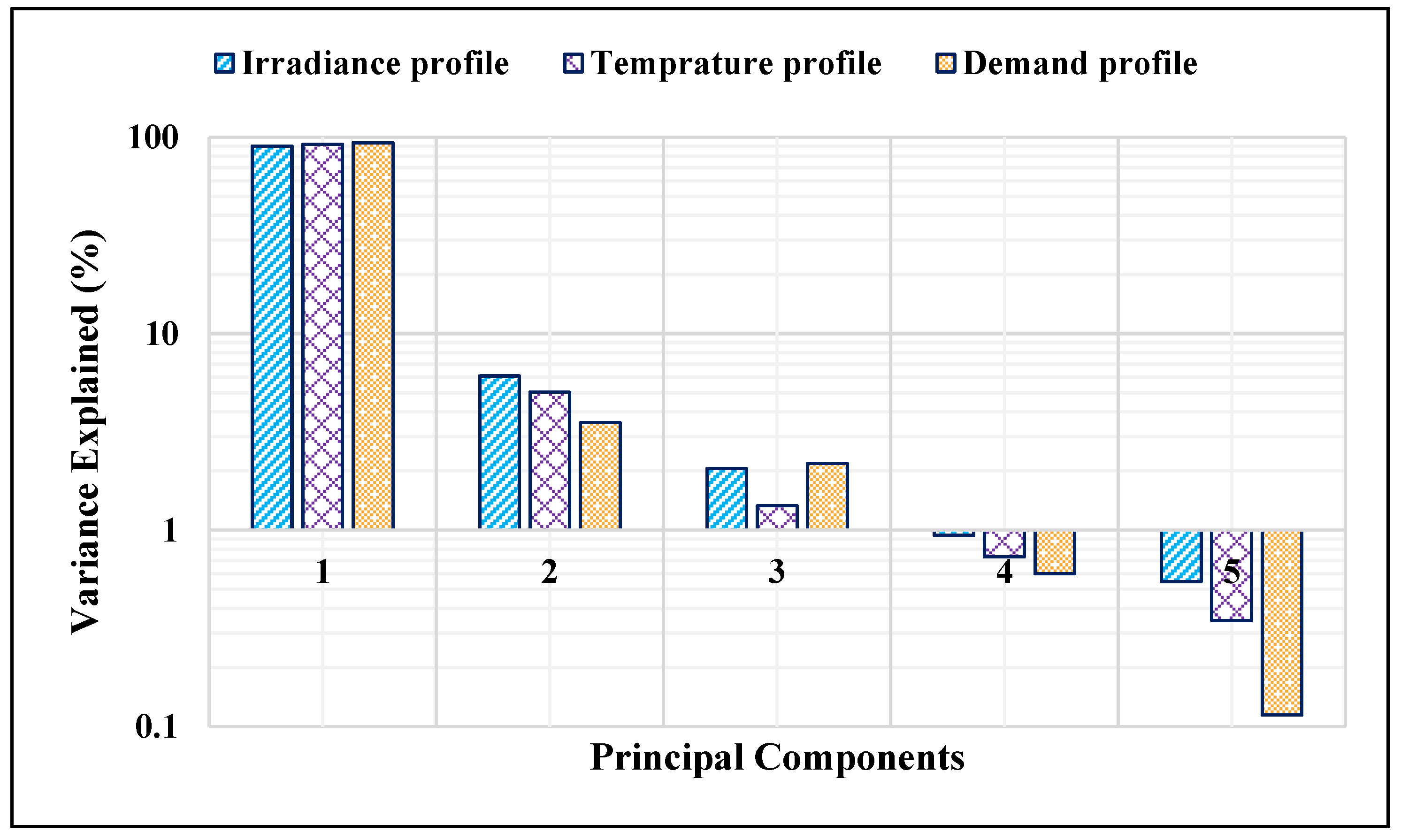
- PV generation and demand profiles are developed using a principal component analysis and k-means clustering and estimated probabilistically based on a Monte Carlo simulation.
- The objective of a fitness function that is taken into consideration is to lower the network voltage deviation.
- A comparison is made with the KOA, GRO, GWO, and SWO.
- The outcomes attained validate the suggested approach’s competency.
2. Electric Vehicle Model
3. The Proposed Optimization Formula
3.1. Problem Fitness Function
3.2. Problem Constraints
- A.
- Generation boundaries:
- B.
- Supply and demand balance:
- C.
- Bus voltage boundaries:
- D.
- Thermal limitations:
- E.
- EV-specific restrictions:
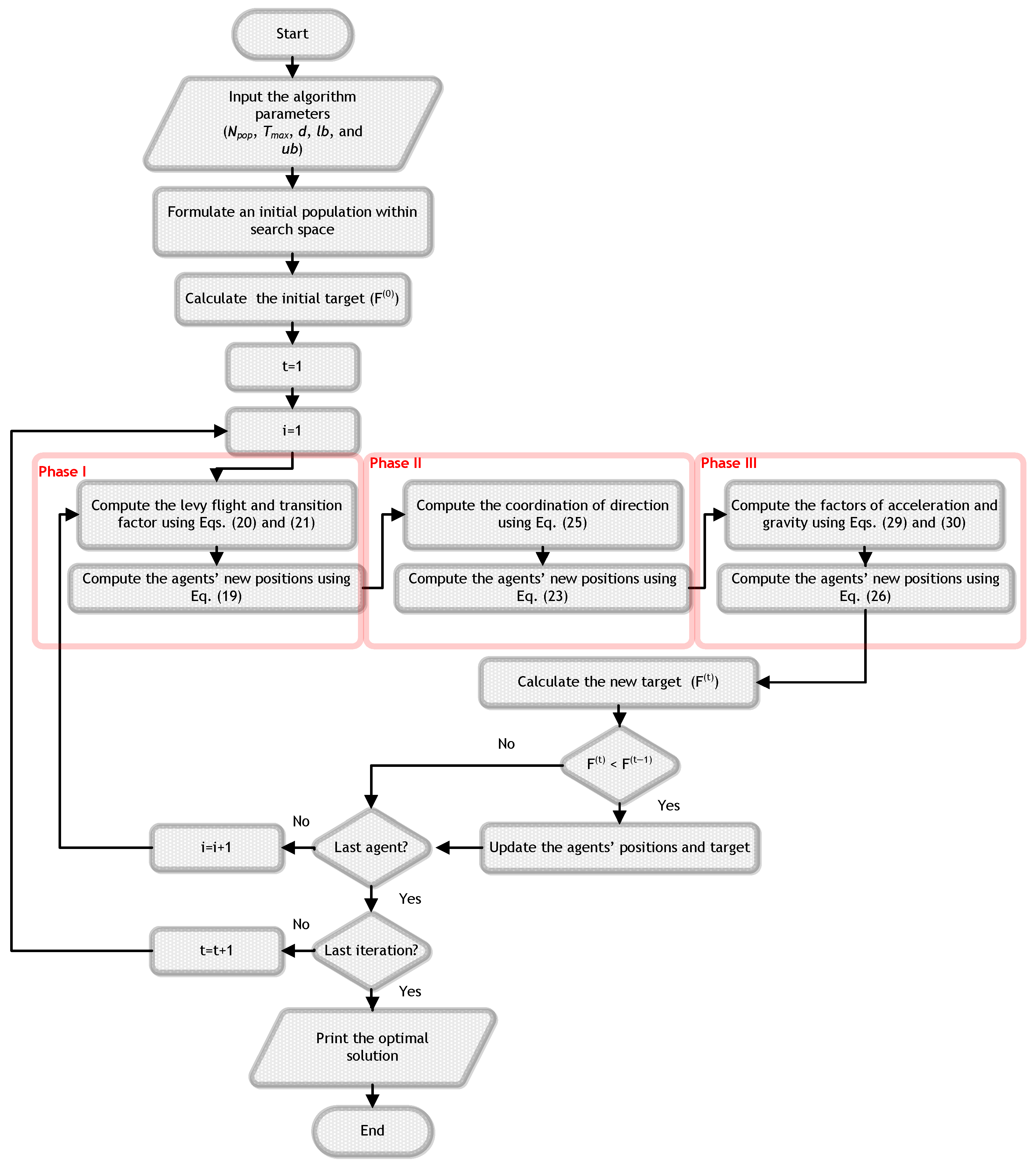
4. Red-Tailed Hawk Algorithm (RTH)
- A.
- Phase 1—high soaring:
- B.
- Phase 2—low soaring:
- C.
- Phase 3—stooping and swooping:
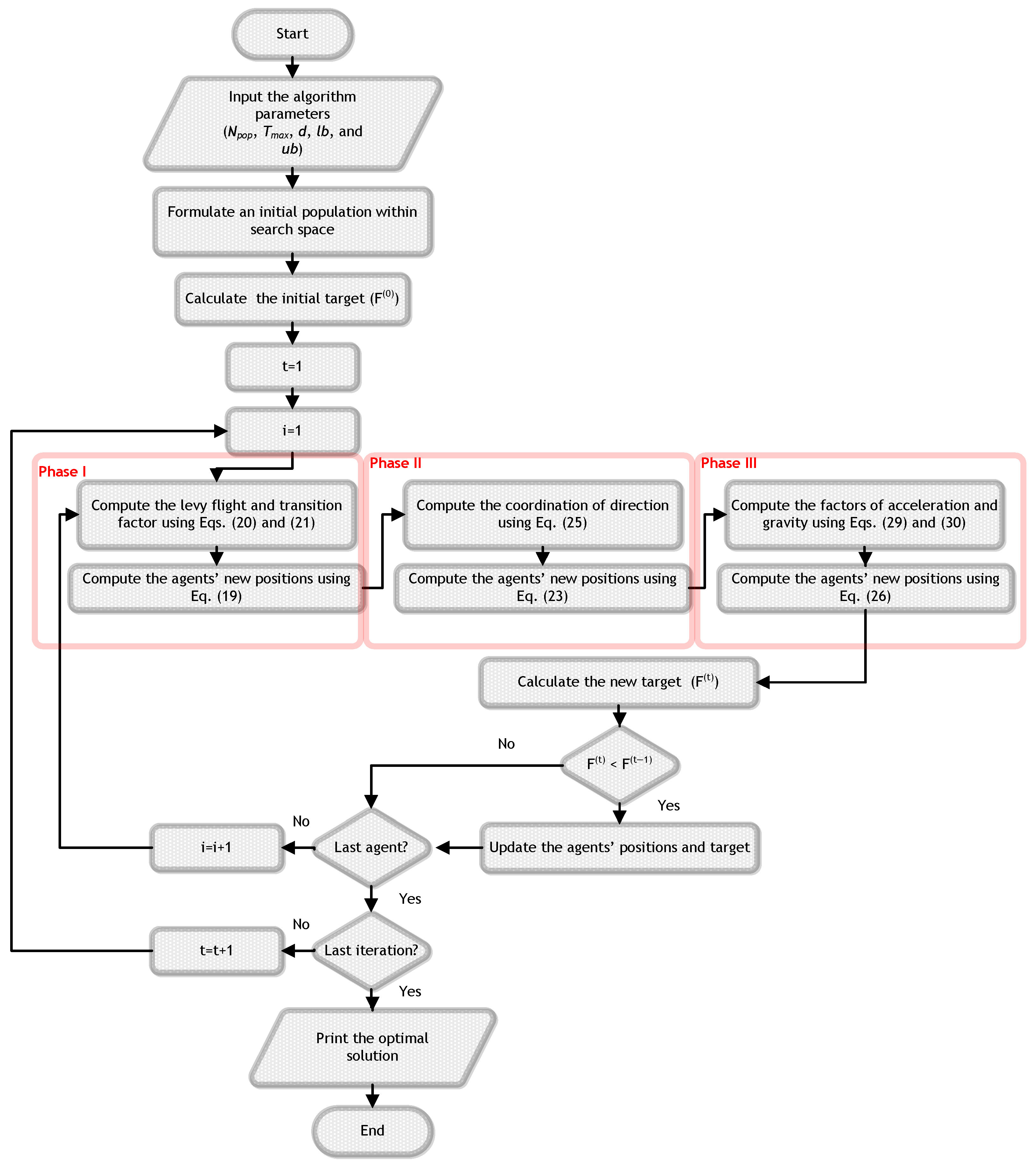
5. The Suggested Approach Incorporated the RTH
| Algorithm 1. Pseudocode for the suggested methodology |
| 1: Input the RTH parameters (Npop, Tmax, d, lb, and ub). 2: Enter the network under investigation’s line and load data. 3: Analyze the load flow for the original network. 4: Create the initial population within search space (lb and ub). 5: for i = 1: Npop 6: Install the solution in the network 7: Analyze the load flow for the network with installed 8: Calculate the initial evaluation function . 9: end for 10: While t > Tmax 11: for i = 1:Npop 12: Calculate the Levy flight and transition factor using Equations (20) and (21). 13: Compute the agents’ new positions using Equation (19). 14: Determine the coordination of direction using Equation (25). 15: Compute the agents’ new positions using Equation (23). 16: Calculate the factors of acceleration and gravity using Equations (29) and (30). 17: Compute the agents’ new positions using Equation (26). 18: Calculate the initial evaluation function . 19: if ˂ 20: Update the locations and sizes of FCSs. 21: end if 22: i = i + 1 23: end for 24: t = t + 1 25: end while 26: Print the optimal solution. |
6. Probabilistic Load Modeling
6.1. The Proposed Approach
6.2. Data Source and Description
- A.
- Load profile:
- B.
- Solar irradiance:
- C.
- PV temperature:
6.3. Preliminary Data Processing
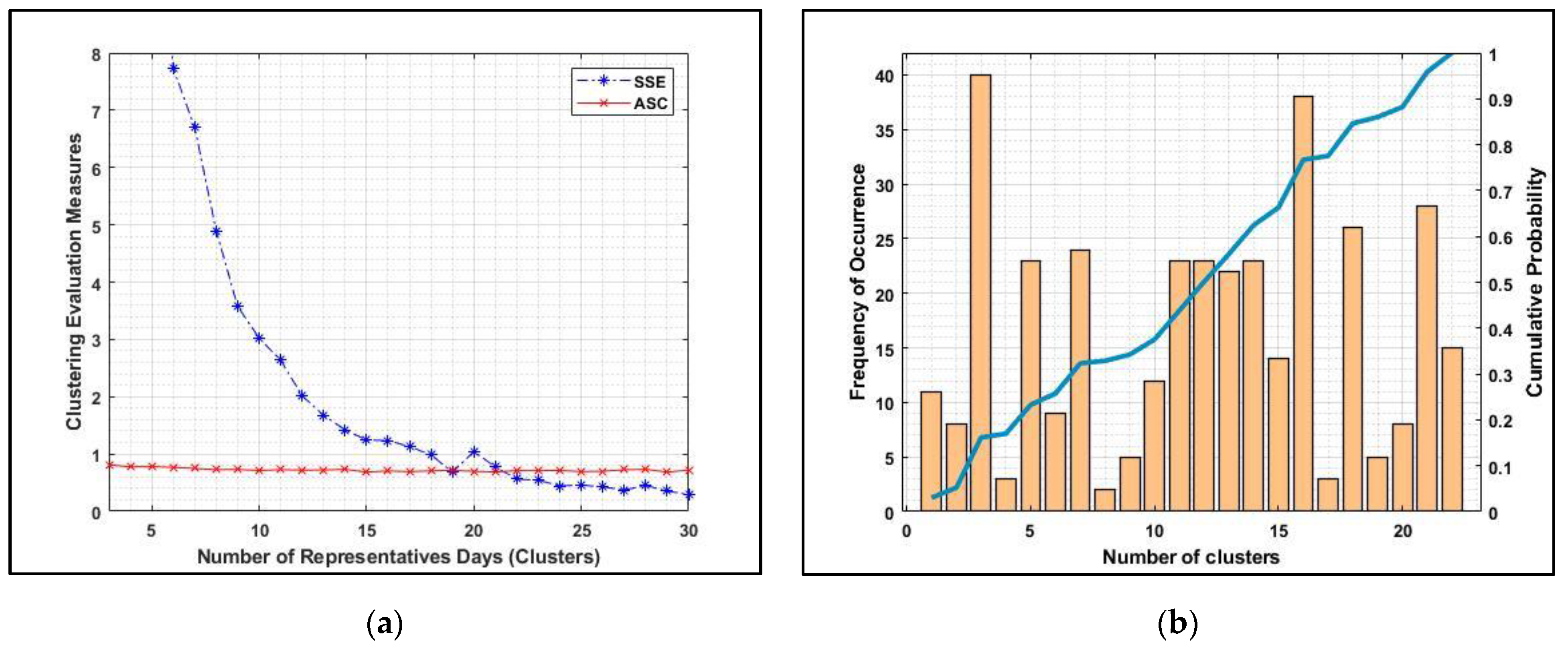
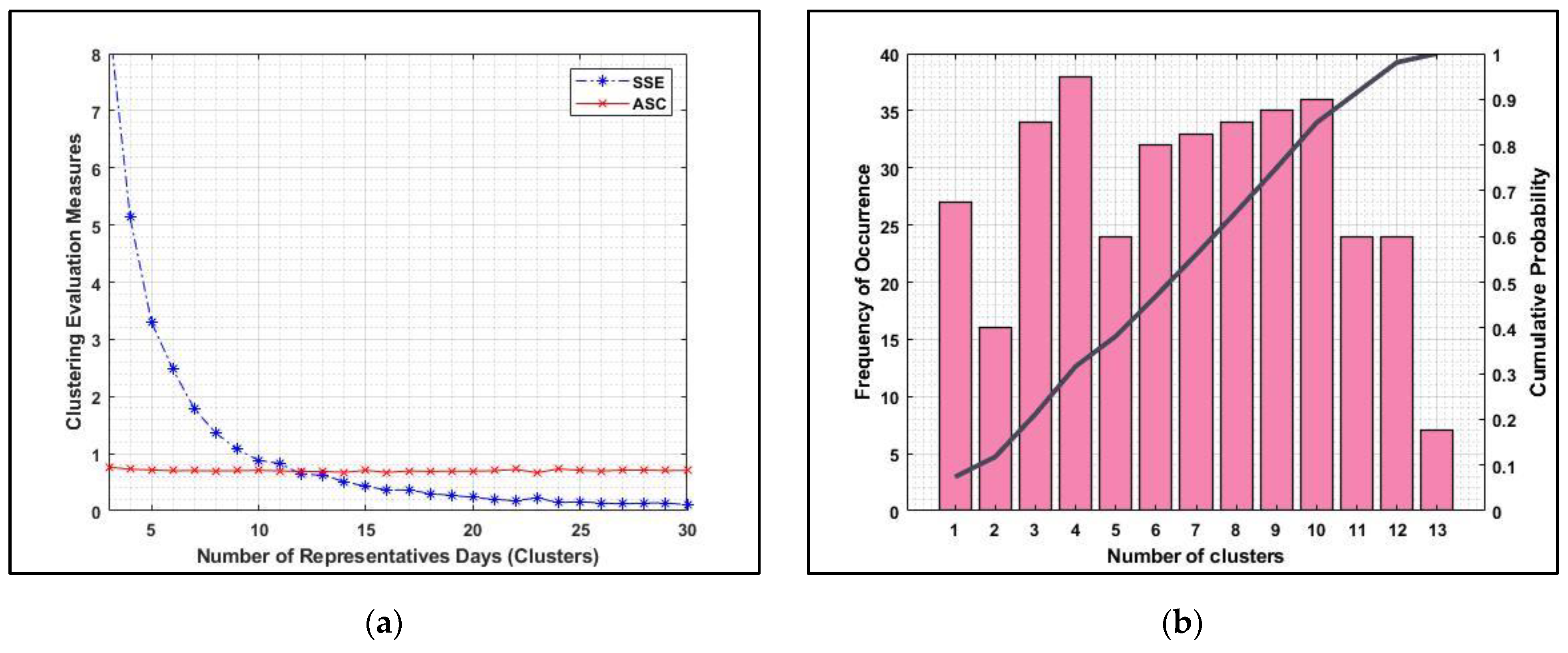
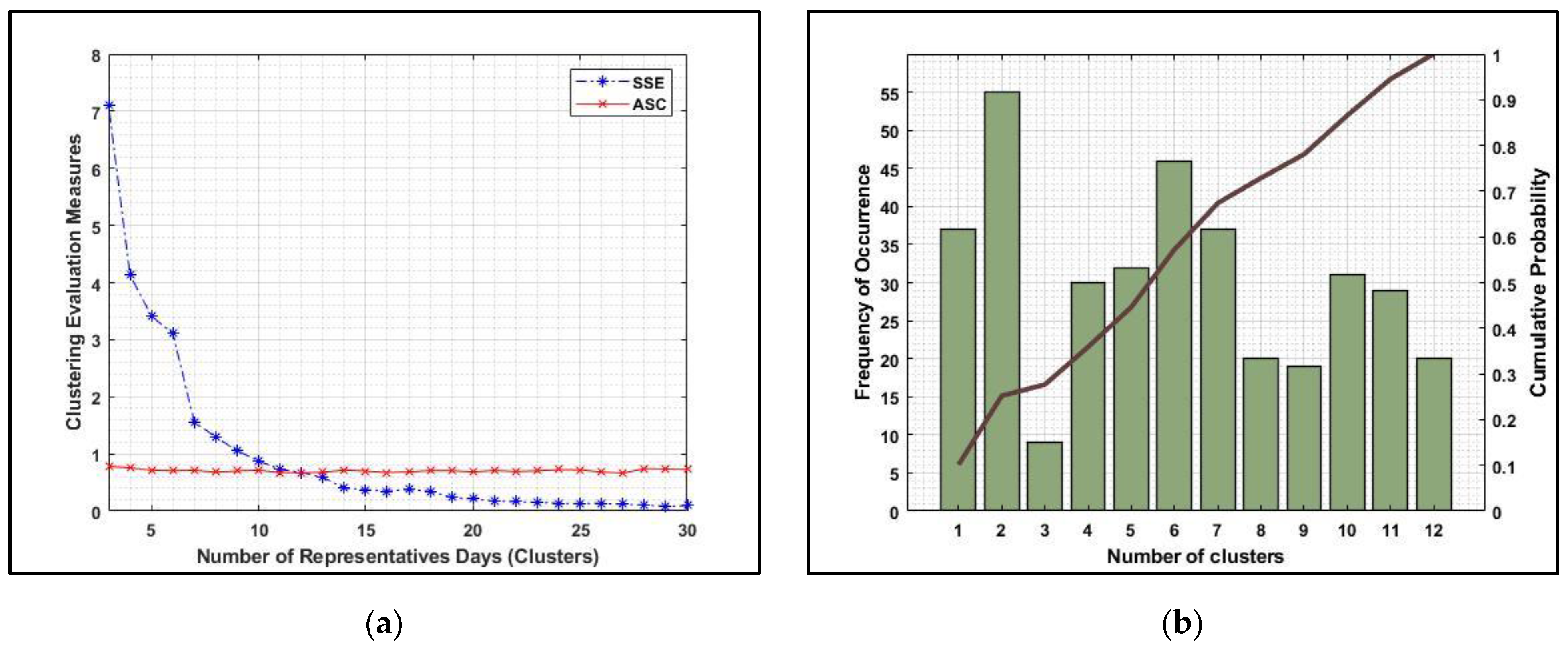
6.4. Data Clustering Stage
6.5. Representative Selection Stage
6.6. Clustering Results
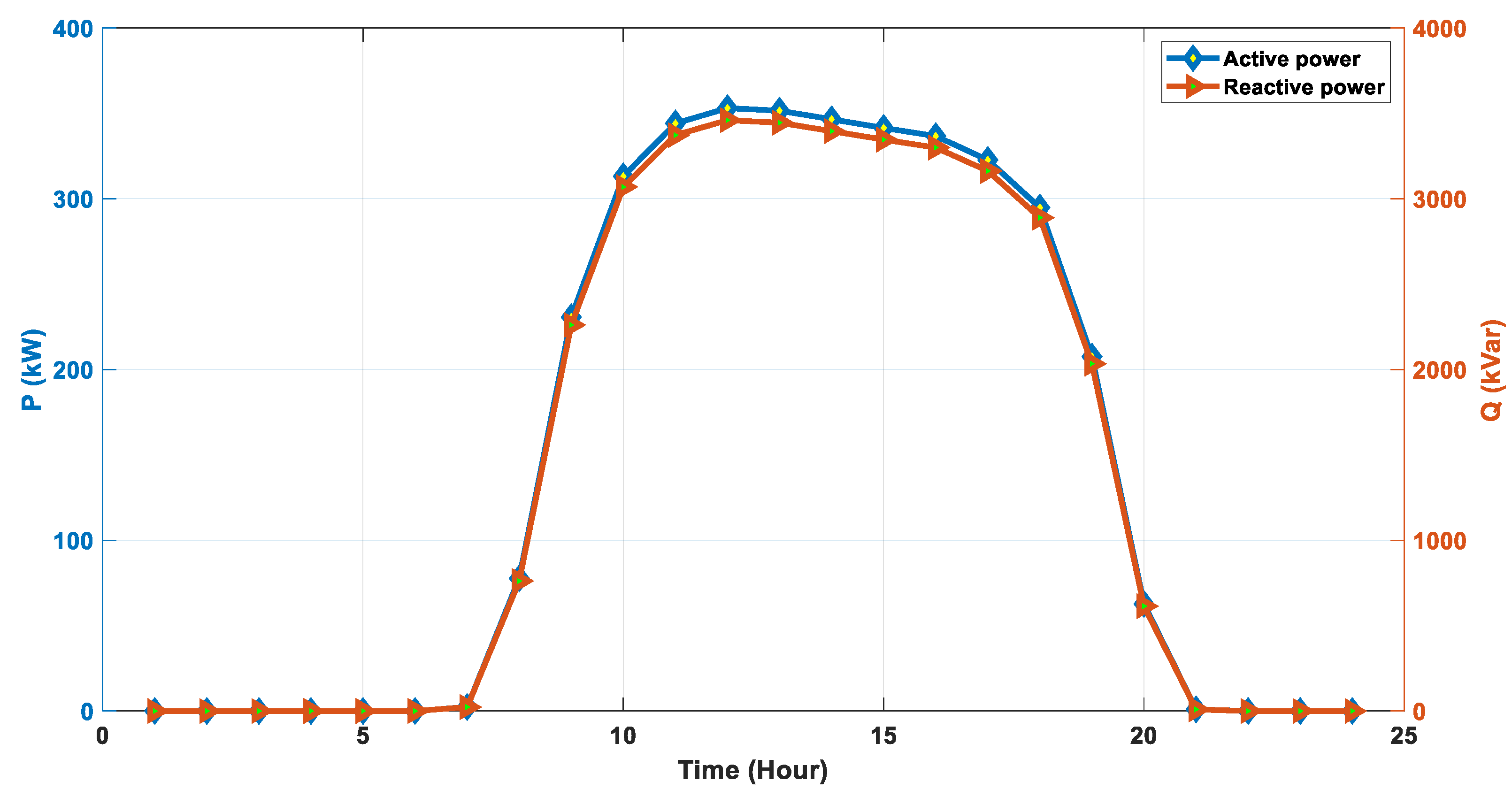
6.7. Profiles in Monte Carlo Simulation
7. Results and Discussion
8. Conclusions
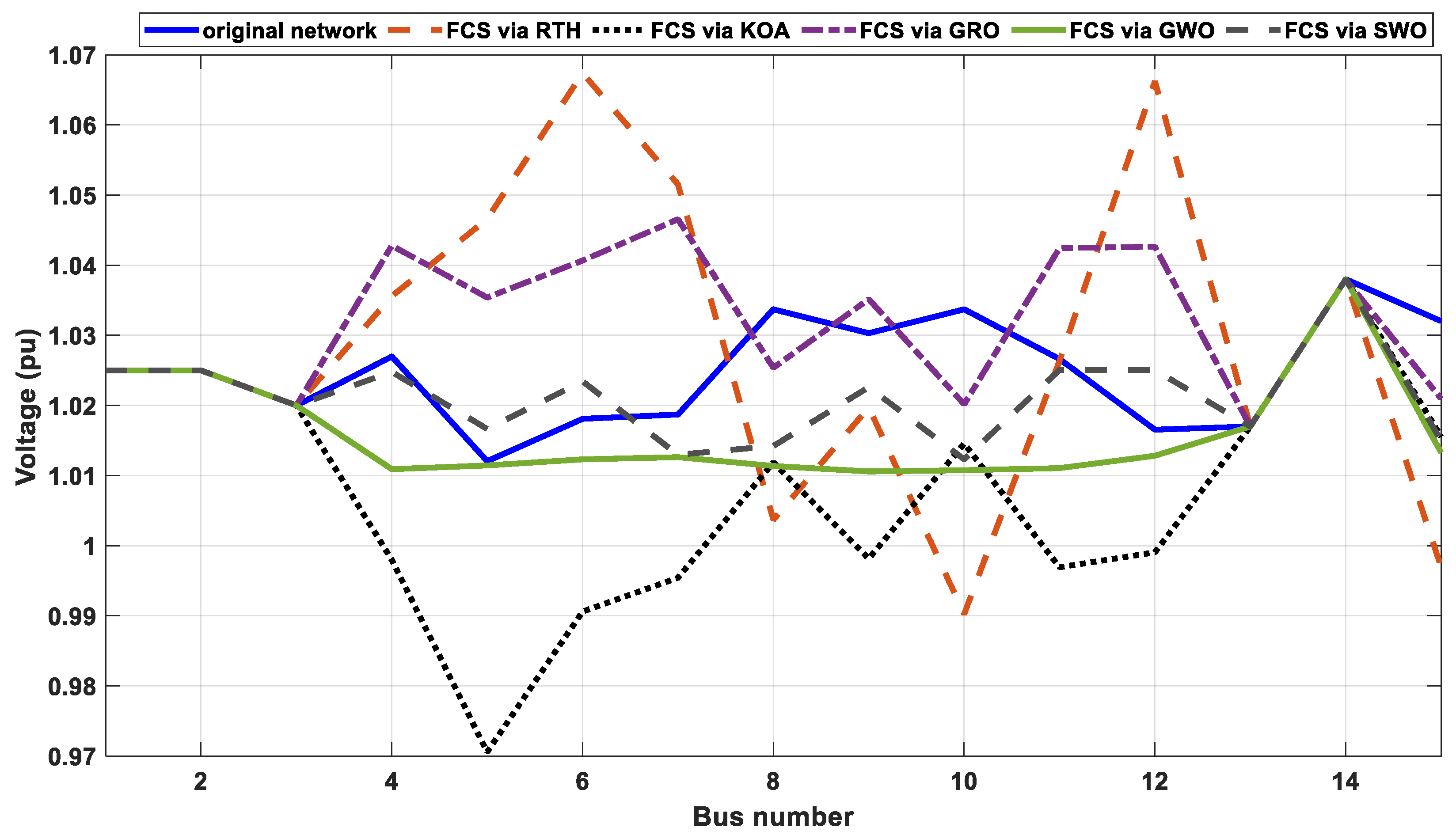
- By attaining the lowest fitness value of 0.134346, the RTH was able to reduce the network voltage deviation by 29.79% from its initial value.
- With a 29.66% reduction in network voltage violation compared to the original network, the GRO ranked second in terms of mitigation.
- With a 0.148358 pu and a 28.38% reduction in the new fitness value over the initial one, the KOA achieved the lowest rank.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Fazelpour, F.; Vafaeipour, M.; Rahbari, O.; Rosen, M.A. Intelligent optimization to integrate a plug-in hybrid electric vehicle smart parking lot with renewable energy resources and enhance grid characteristics. Energy Convers. Manag. 2014, 77, 250–261. [Google Scholar] [CrossRef]
- Amini, M.H.; Boroojeni, K.G.; Wang, C.J.; Nejadpak, A.; Iyengar, S.S.; Karabasoglu, O. Effect of electric vehicle parking lots’ charging demand as dispatchable loads on power systems loss. In Proceedings of the 2016 IEEE International Conference on Electro Information Technology (EIT), Grand Forks, ND, USA, 19–21 May 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 0499–0503. [Google Scholar]
- Xu, N.Z.; Chung, C.Y. Uncertainties of EV charging and effects on well-being analysis of generating systems. IEEE Trans. Power Syst. 2014, 30, 2547–2557. [Google Scholar] [CrossRef]
- Ahmad, F.; Bilal, M. Allocation of plug-in electric vehicle charging station with integrated solar powered distributed generation using an adaptive particle swarm optimization. Electr. Eng. 2023, 1–14. [Google Scholar] [CrossRef]
- Ghanaei, N.; Moghaddam, M.S.; Alibeaki, E.; Salehi, N.; Davarzani, R. Bi-level stochastic optimization model of smart distribution grids considering the transmission network to reduce vulnerability. Energy Syst. 2023, 1–34. [Google Scholar] [CrossRef]
- Ibtihel Ben, G.; de Nunzio, G.; Sciarretta, A. Optimal Placement of Fast Charging Infrastructure for Electric Vehicles: An Optimal Routing and Spatial Clustering Approach. In Proceedings of the 26th IEEE International Conference on Intelligent Transportation Systems (ITSC 2023), Bilbao, Spain, 24–28 September 2023. [Google Scholar]
- Kumar, N.; Kumar, T.; Nema, S.; Thakur, T. Reliability oriented techno-economic assessment of fast charging stations with photovoltaic and battery systems in paired distribution & urban network. J. Energy Storage 2023, 72, 108814. [Google Scholar]
- Zhou, G.; Dong, Q.; Zhao, Y.; Wang, H.; Jian, L.; Jia, Y. Bilevel optimization approach to fast charging station planning in electrified transportation networks. Appl. Energy 2023, 350, 121718. [Google Scholar] [CrossRef]
- Singh, K.; Mistry, K.D.; Patel, H.G. Optimal Placement of Electric Vehicle Charging Station and DG in a Distribution System for Loss Minimization. In Proceedings of the 2023 IEEE 3rd International Conference on Sustainable Energy and Future Electric Transportation (SEFET), Bhubaneswar, India, 9–12 August 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 1–6. [Google Scholar]
- Alshareef, S.M.; Fathy, A. Efficient Red Kite Optimization Algorithm for Integrating the Renewable Sources and Electric Vehicle Fast Charging Stations in Radial Distribution Networks. Mathematics 2023, 11, 3305. [Google Scholar] [CrossRef]
- Kapoor, A.; Patel, V.S.; Sharma, A.; Mohapatra, A. Optimal Planning of Fast EV Charging Stations in a Coupled Transportation and Electrical Power Distribution Network. IEEE Trans. Autom. Sci. Eng. 2023, 1–11. [Google Scholar] [CrossRef]
- Li, Y.; Su, S.; Zhang, M.; Liu, Q.; Nie, X.; Xia, M.; Micu, D.D. Multi-Agent Graph Reinforcement Learning Method for Electric Vehicle on-Route Charging Guidance in Coupled Transportation Electrification. IEEE Trans. Sustain. Energy 2023, 15, 1180–1193. [Google Scholar] [CrossRef]
- Draz, A.; Othman, A.M.; El-Fergany, A.A. State-of-the-Art with Numerical Analysis on Electric Fast Charging Stations: Infrastructures, Standards, Techniques, and Challenges. Renew. Energy Focus 2023, 47, 100499. [Google Scholar] [CrossRef]
- Zhou, G.; Zhao, Y.; Lai, C.S.; Jia, Y. A profitability assessment of fast-charging stations under vehicle-to-grid smart charging operation. J. Clean. Prod. 2023, 428, 139014. [Google Scholar] [CrossRef]
- Gupta, R.S.; Anand, Y.; Tyagi, A.; Anand, S. Sustainable charging station allocation in the distribution system for electric vehicles considering technical, economic, and societal factors. J. Energy Storage 2023, 73, 109052. [Google Scholar] [CrossRef]
- Ren, H.; Zhou, Y.; Wen, F.; Liu, Z. Optimal dynamic power allocation for electric vehicles in an extreme fast charging station. Appl. Energy 2023, 349, 121497. [Google Scholar] [CrossRef]
- Bhadoriya, J.S.; Gupta, A.R.; Kumar, A.; Ray, R.; Maini, S. Enhancement of the distribution network in the presence of EV charging stations augmented by distributed generation. Electr. Eng. 2023, 105, 3703–3717. [Google Scholar] [CrossRef]
- Napoli, G.; Polimeni, A.; Micari, S.; Andaloro, L.; Antonucci, V. Optimal allocation of electric vehicle charging stations in a highway network: Part 1. Methodology and test application. J. Energy Storage 2020, 27, 101102. [Google Scholar] [CrossRef]
- Kong, W.; Luo, Y.; Feng, G.; Li, K.; Peng, H. Optimal location planning method of fast charging station for electric vehicles considering operators, drivers, vehicles, traffic flow and power grid. Energy 2019, 186, 115826. [Google Scholar] [CrossRef]
- Hadian, E.; Akbari, H.; Farzinfar, M.; Saeed, S. Optimal allocation of electric vehicle charging stations with adopted smart charging/discharging schedule. IEEE Access 2020, 8, 196908–196919. [Google Scholar] [CrossRef]
- Liu, L.; Zhang, Y.; Da, C.; Huang, Z.; Wang, M. Optimal allocation of distributed generation and electric vehicle charging stations based on intelligent algorithm and bi-level programming. Int. Trans. Electr. Energy Syst. 2020, 30, e12366. [Google Scholar] [CrossRef]
- Zeb, M.Z.; Imran, K.; Khattak, A.; Janjua, A.K.; Pal, A.; Nadeem, M.; Zhang, J.; Khan, S. Optimal placement of electric vehicle charging stations in the active distribution network. IEEE Access 2020, 8, 68124–68134. [Google Scholar] [CrossRef]
- Pal, A.; Bhattacharya, A.; Chakraborty, A.K. Allocation of electric vehicle charging station considering uncertainties. Sustain. Energy Grids Netw. 2021, 25, 100422. [Google Scholar] [CrossRef]
- Ma, T.-Y.; Xie, S. Optimal fast charging station locations for electric ridesharing with vehicle-charging station assignment. Transp. Res. Part D Transp. Environ. 2021, 90, 102682. [Google Scholar] [CrossRef]
- Ahmad, F.; Iqbal, A.; Ashraf, I.; Marzband, M.; Khan, I. Optimal location of electric vehicle charging station and its impact on distribution network: A review. Energy Rep. 2022, 8, 2314–2333. [Google Scholar] [CrossRef]
- Deb, S.; Tammi, K.; Kalita, K.; Mahanta, P. Charging station placement for electric vehicles: A case study of Guwahati city, India. IEEE Access 2019, 7, 100270–100282. [Google Scholar] [CrossRef]
- Campaña, M.; Inga, E.; Cárdenas, J. Optimal sizing of electric vehicle charging stations considering urban traffic flow for smart cities. Energies 2021, 14, 4933. [Google Scholar] [CrossRef]
- Khan, W.; Ahmad, F.; Alam, M.S. Fast EV charging station integration with grid ensuring optimal and quality power exchange. Eng. Sci. Technol. Int. J. 2019, 22, 143–152. [Google Scholar] [CrossRef]
- Shukla, A.; Verma, K.; Kumar, R. Multi-objective synergistic planning of EV fast-charging stations in the distribution system coupled with the transportation network. IET Gener. Transm. Distrib. 2019, 13, 3421–3432. [Google Scholar] [CrossRef]
- Jiang, X.; Zhao, L.; Cheng, Y.; Wei, S.; Jin, Y. Optimal configuration of electric vehicles for charging stations under the fast power supplement mode. J. Energy Storage 2022, 45, 103677. [Google Scholar] [CrossRef]
- Hashemian, S.N.; Latify, M.A.; Yousefi, G.R. PEV fast-charging station sizing and placement in coupled transportation-distribution networks considering power line conditioning capability. IEEE Trans. Smart Grid 2020, 11, 4773–4783. [Google Scholar] [CrossRef]
- Geetha, B.T.; Prakash, A.; Jeyasudha, S.; Dinakaran, K.P. Hybrid approach based combined allocation of electric vehicle charging stations and capacitors in distribution systems. J. Energy Storage 2023, 72, 108273. [Google Scholar] [CrossRef]
- Zhou, G.; Zhu, Z.; Luo, S. Location optimization of electric vehicle charging stations: Based on cost model and genetic algorithm. Energy 2022, 247, 123437. [Google Scholar] [CrossRef]
- Rajesh, P.; Shajin, F.H. Optimal allocation of EV charging spots and capacitors in distribution network improving voltage and power loss by Quantum-Behaved and Gaussian Mutational Dragonfly Algorithm (QGDA). Electr. Power Syst. Res. 2021, 194, 107049. [Google Scholar] [CrossRef]
- Wu, X.; Feng, Q.; Bai, C.; Lai, C.S.; Jia, Y.; Lai, L.L. A novel fast-charging stations locational planning model for electric bus transit system. Energy 2021, 224, 120106. [Google Scholar] [CrossRef]
- He, Y.; Kockelman, K.M.; Perrine, K.A. Optimal locations of US fast charging stations for long-distance trip completion by battery electric vehicles. J. Clean. Prod. 2019, 214, 452–461. [Google Scholar] [CrossRef]
- Pal, A.; Bhattacharya, A.; Chakraborty, A.K. Placement of public fast-charging station and solar distributed generation with battery energy storage in distribution network considering uncertainties and traffic congestion. J. Energy Storage 2021, 41, 102939. [Google Scholar] [CrossRef]
- Suhail, M.; Akhtar, I.; Kirmani, S. Objective functions and infrastructure for optimal placement of electrical vehicle charging station: A comprehensive survey. IETE J. Res. 2023, 69, 5250–5260. [Google Scholar] [CrossRef]
- Akhmetshin, A.R.; Suslov, K.V.; Olentsevich, V.A.; Gladkikh, V.A.; Karlina, A.I.; Baraboshkin, K.A. The impact of the passage of long-distance trains on the required electrical capacity of the transport infrastructure facilities of the Eastern polygon of Railways. In Journal of Physics: Conference Series; IOP Publishing: Bristol, UK, 2022; Volume 2176, p. 012038. [Google Scholar]
- Moghaddam, A.A.; Seifi, A.; Niknam, T. Multi-operation management of a typical micro-grids using Particle Swarm Optimization: A comparative study. Renew. Sustain. Energy Rev. 2012, 16, 1268–1281. [Google Scholar] [CrossRef]
- Fathy, A.; Kaaniche, K.; Alanazi, T.M. Recent approach based social spider optimizer for optimal sizing of hybrid PV/wind/battery/diesel integrated microgrid in aljouf region. IEEE Access 2020, 8, 57630–57645. [Google Scholar] [CrossRef]
- Roe, C.; Meliopoulos, A.P.; Meisel, J.; Overbye, T. Power system level impacts of plug-in hybrid electric vehicles using simulation data. In Proceedings of the 2008 IEEE Energy 2030 Conference, Atlanta, GA, USA, 17–18 November 2008; IEEE: Piscataway, NJ, USA, 2008; pp. 1–6. [Google Scholar]
- Ferahtia, S.; Houari, A.; Rezk, H.; Djerioui, A.; Machmoum, M.; Motahhir, S.; Ait-Ahmed, M. Red-tailed hawk algorithm for numerical optimization and real-world problems. Sci. Rep. 2023, 13, 12950. [Google Scholar] [CrossRef]
- Proedrou, E. A comprehensive review of residential electricity load profile models. IEEE Access 2021, 9, 12114–12133. [Google Scholar] [CrossRef]
- Li, H.; Wang, Z.; Hong, T.; Parker, A.; Neukomm, M. Characterizing patterns and variability of building electric load profiles in time and frequency domains. Appl. Energy 2021, 291, 116721. [Google Scholar] [CrossRef]
- Zhong, S.; Tam, K.-S. Hierarchical classification of load profiles based on their characteristic attributes in frequency domain. IEEE Trans. Power Syst. 2014, 30, 2434–2441. [Google Scholar] [CrossRef]
- Herraiz-Cañete, Á.; Ribó-Pérez, D.; Bastida-Molina, P.; Gómez-Navarro, T. Forecasting energy demand in isolated rural communities: A comparison between deterministic and stochastic approaches. Energy Sustain. Dev. 2022, 66, 101–116. [Google Scholar] [CrossRef]
- ElNozahy, M.S.; Salama, M.M.A.; Seethapathy, R. A probabilistic load modelling approach using clustering algorithms. In Proceedings of the 2013 IEEE Power & Energy Society General Meeting, Vancouver, BC, Canada, 21–25 July 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 1–5. [Google Scholar]
- Grigg, C.; Wong, P.; Albrecht, P.; Allan, R.; Bhavaraju, M.; Billinton, R.; Chen, Q.; Fong, C.; Haddad, S.; Kuruganty, S.; et al. The IEEE reliability test system-1996. A report prepared by the reliability test system task force of the application of probability methods subcommittee. IEEE Trans. Power Syst. 1999, 14, 1010–1020. [Google Scholar] [CrossRef]
- Panapakidis, I.P.; Alexiadis, M.C.; Papagiannis, G.K. Enhancing the clustering process in the category model load profiling. IET Gener. Transm. Distrib. 2015, 9, 655–665. [Google Scholar] [CrossRef]
- Kovács, F.; Legány, C.; Babos, A. Cluster validity measurement techniques. In Proceedings of the 6th International Symposium of Hungarian Researchers on Computational Intelligence, Budapest, Hungary, 18–19 November 2005; Volume 35. [Google Scholar]
- Alshareef, S.M.; Morsi, W.G. Probabilistic commercial load profiles at different climate zones. In Proceedings of the 2017 IEEE Electrical Power and Energy Conference (EPEC), Saskatoon, SK, Canada, 22–25 October 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–7. [Google Scholar]
- Abdel-Basset, M.; Mohamed, R.; Azeem, S.A.A.; Jameel, M.; Abouhawwash, M. Kepler optimization algorithm: A new metaheuristic algorithm inspired by Kepler’s laws of planetary motion. Knowl.-Based Syst. 2023, 268, 110454. [Google Scholar] [CrossRef]
- Zolf, K. Gold rush optimizer: A new population-based metaheuristic algorithm. Oper. Res. Decis. 2023, 33, 113–150. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey wolf optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef]
- Abdel-Basset, M.; Mohamed, R.; Jameel, M.; Abouhawwash, M. Spider wasp optimizer: A novel meta-heuristic optimization algorithm. Artif. Intell. Rev. 2023, 56, 11675–11738. [Google Scholar] [CrossRef]
- Blanco, C.; Paz, F.; Zurbriggen, I.G.; Garcia, P.; Ordonez, M. Distributed islanding detection in multisource dc microgrids: Pilot signal cancelation. IEEE Access 2022, 10, 78370–78383. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| RTH | KOA | GRO | GWO | SWO | ||
|---|---|---|---|---|---|---|
| First fast charging station | P (MW) | 25 | 20.5428 | 10.3856 | 16.2059 | 3.4559 |
| Q (Mvar) | 12.1081 | 9.94933 | 5.03 | 7.8489 | 1.67377 | |
| Place | 15 | 10 | 2 | 15 | 15 | |
| Second fast charging station | P (MW) | 19.1039 | 6.71063 | 0.4827 | 3.06014 | 14.7409 |
| Q (Mvar) | 9.25242 | 3.25011 | 0.2338 | 1.4821 | 7.13935 | |
| Place | 2 | 15 | 2 | 15 | 10 | |
| Third fast charging station | P (MW) | 10.0272 | 25 | 5.4749 | 10.7758 | 21.2383 |
| Q (Mvar) | 4.85639 | 12.1081 | 2.6516 | 5.219 | 10.2862 | |
| Place | 13 | 15 | 12 | 2 | 12 | |
| Voltage deviation (pu) | 0.134346 | 0.148358 | 0.135646 | 0.13725 | 0.147754 | |
| Max. voltage (pu)/place | 1.0674/(6) | 1.0380/(14) | 1.0466/(7) | 1.0380/(14) | 1.0380/(14) | |
| Min. voltage (pu)/place | 0.9902/(10) | 0.9706/(5) | 1.0170/(13) | 1.0106/(9) | 1.0123/(10) | |
| Best | Worst | Average | Variance | Std | |
|---|---|---|---|---|---|
| RTH | 0.1322 | 0.1616 | 0.1396 | 0.0006 | 0.0049 |
| KOA | 0.1484 | 0.2961 | 0.1934 | 0.0325 | 0.0368 |
| GRO | 0.1356 | 0.1551 | 0.1449 | 0.0006 | 0.0050 |
| GWO | 0.1373 | 0.1846 | 0.1455 | 0.0018 | 0.0086 |
| SWO | 0.1478 | 0.3546 | 0.2405 | 0.0912 | 0.0616 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alshareef, S.M.; Fathy, A. Optimal Allocation of Fast Charging Stations on Real Power Transmission Network with Penetration of Renewable Energy Plant. World Electr. Veh. J. 2024, 15, 172. https://doi.org/10.3390/wevj15040172
Alshareef SM, Fathy A. Optimal Allocation of Fast Charging Stations on Real Power Transmission Network with Penetration of Renewable Energy Plant. World Electric Vehicle Journal. 2024; 15(4):172. https://doi.org/10.3390/wevj15040172
Chicago/Turabian StyleAlshareef, Sami M., and Ahmed Fathy. 2024. "Optimal Allocation of Fast Charging Stations on Real Power Transmission Network with Penetration of Renewable Energy Plant" World Electric Vehicle Journal 15, no. 4: 172. https://doi.org/10.3390/wevj15040172
APA StyleAlshareef, S. M., & Fathy, A. (2024). Optimal Allocation of Fast Charging Stations on Real Power Transmission Network with Penetration of Renewable Energy Plant. World Electric Vehicle Journal, 15(4), 172. https://doi.org/10.3390/wevj15040172