
Teleoperated Driving with Virtual Twin Technology: A Simulator-Based Approach


Abstract
:1. Introduction
2. Methods
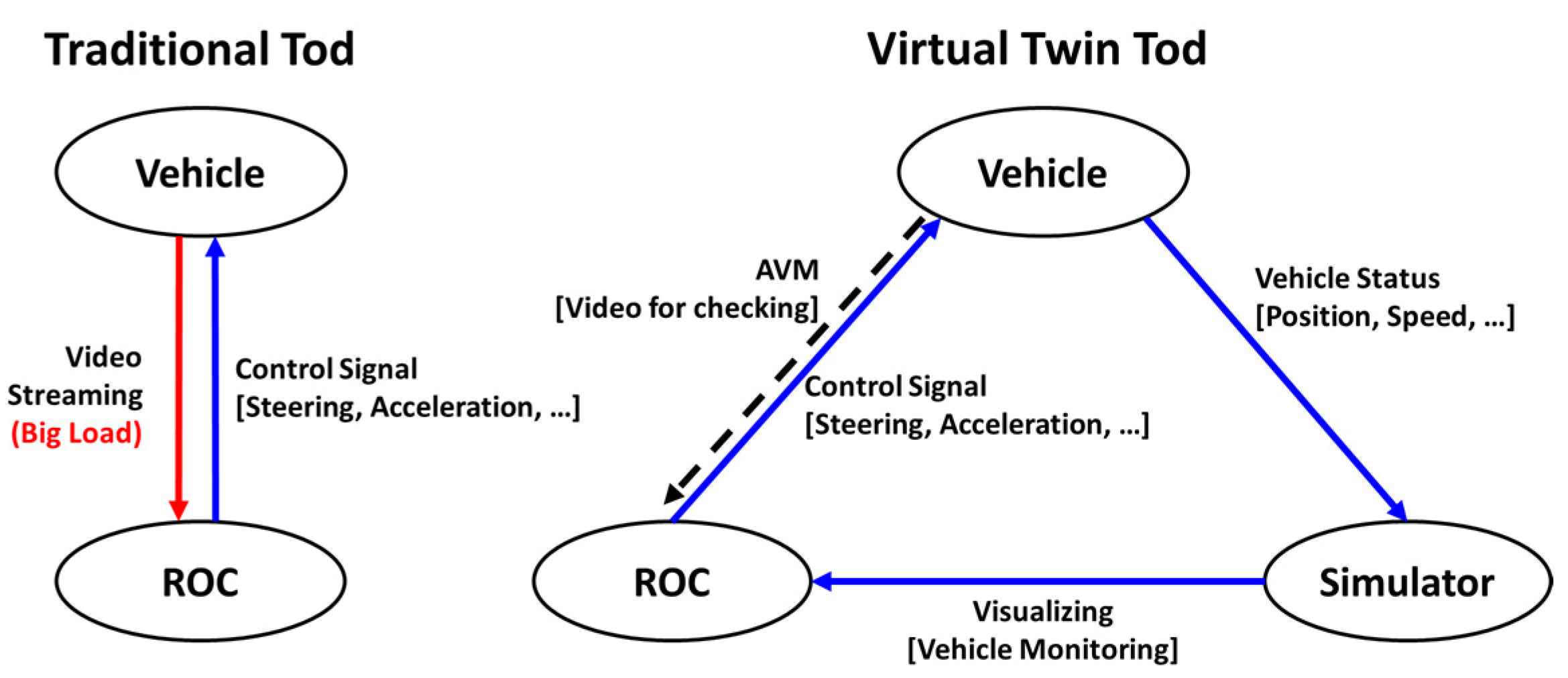
2.1. Teleoperated Driving (ToD)
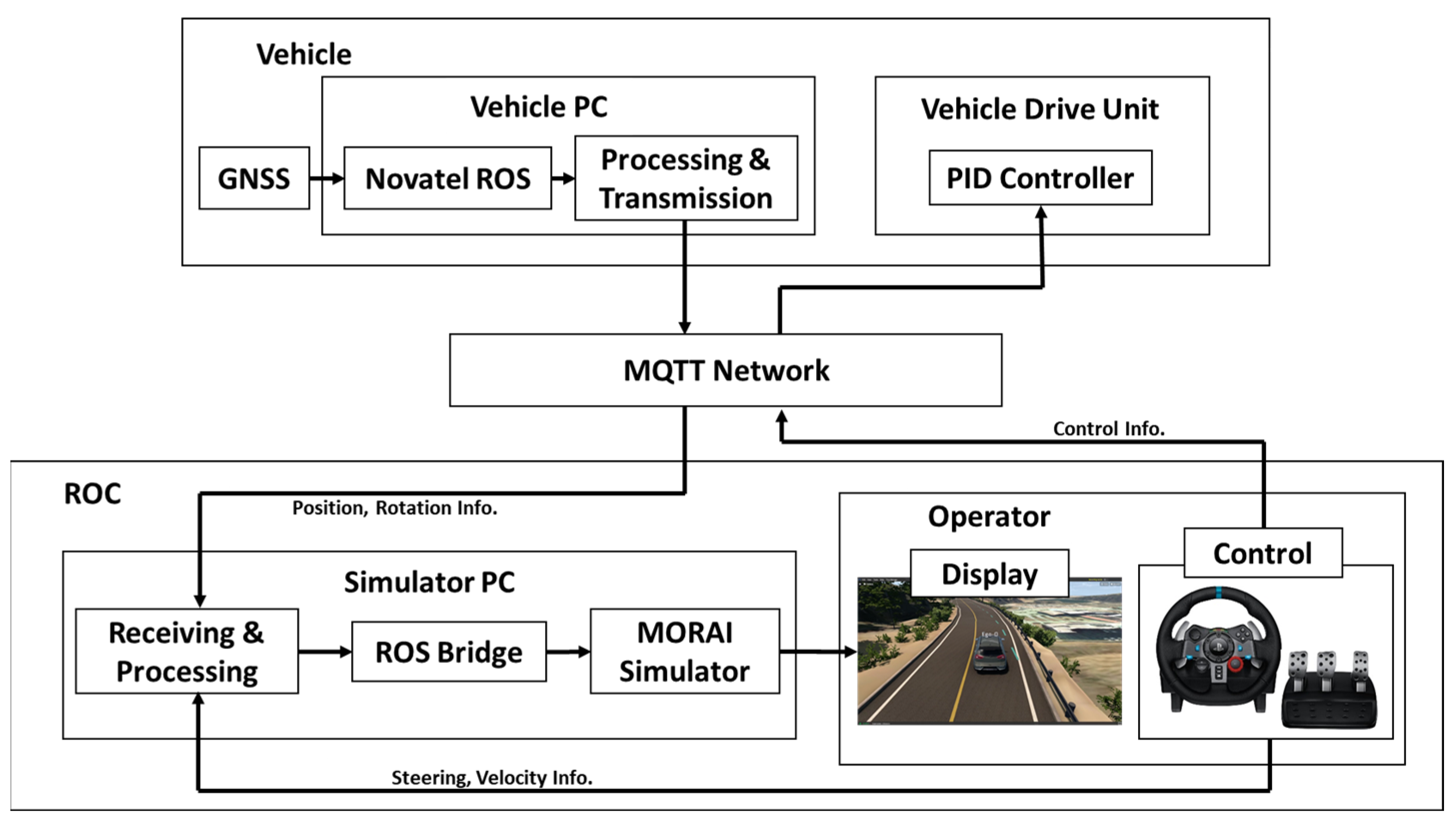
2.2. Virtual Twin ToD System
2.3. Virtual Twin Implementation
3. Results and Discussion
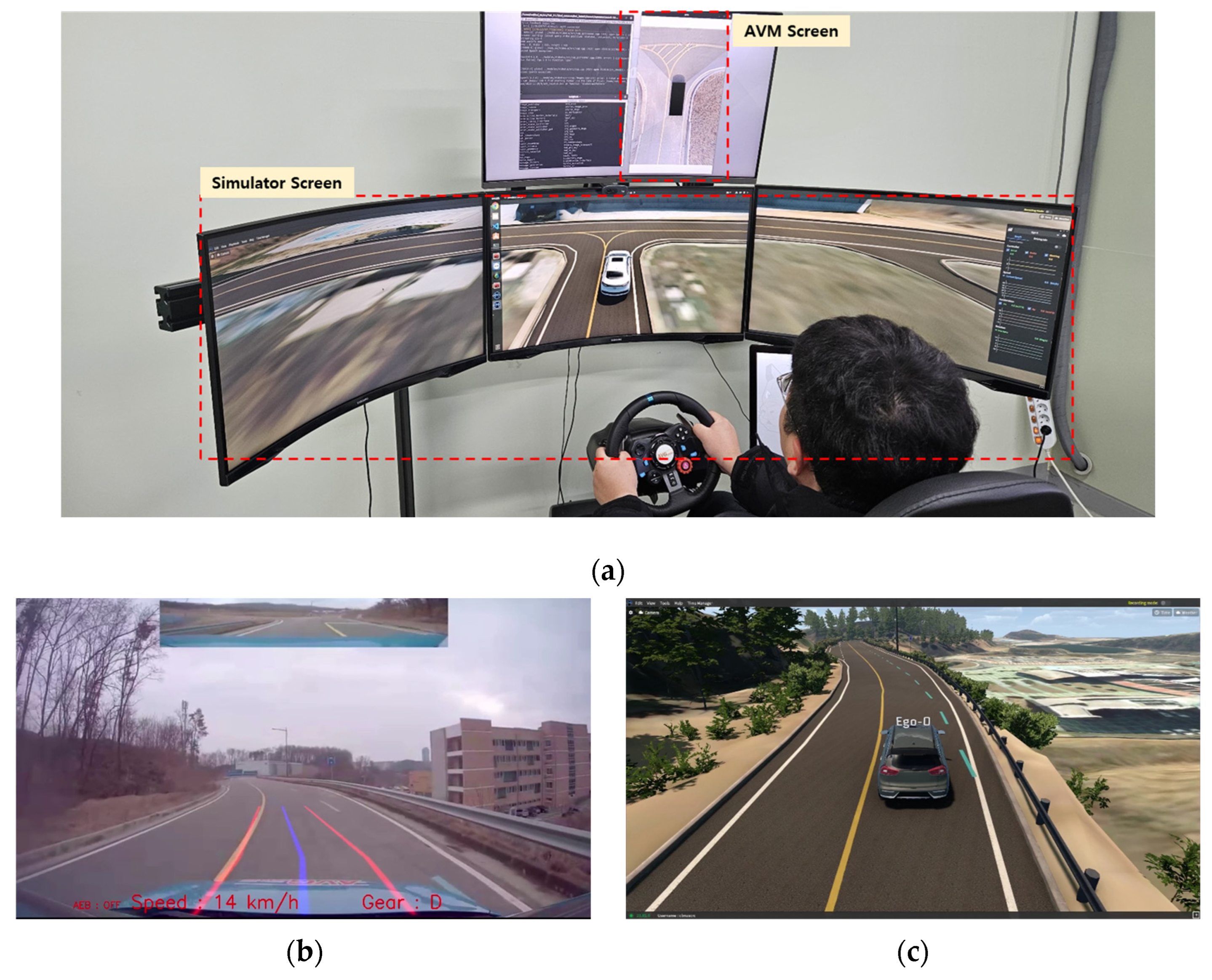
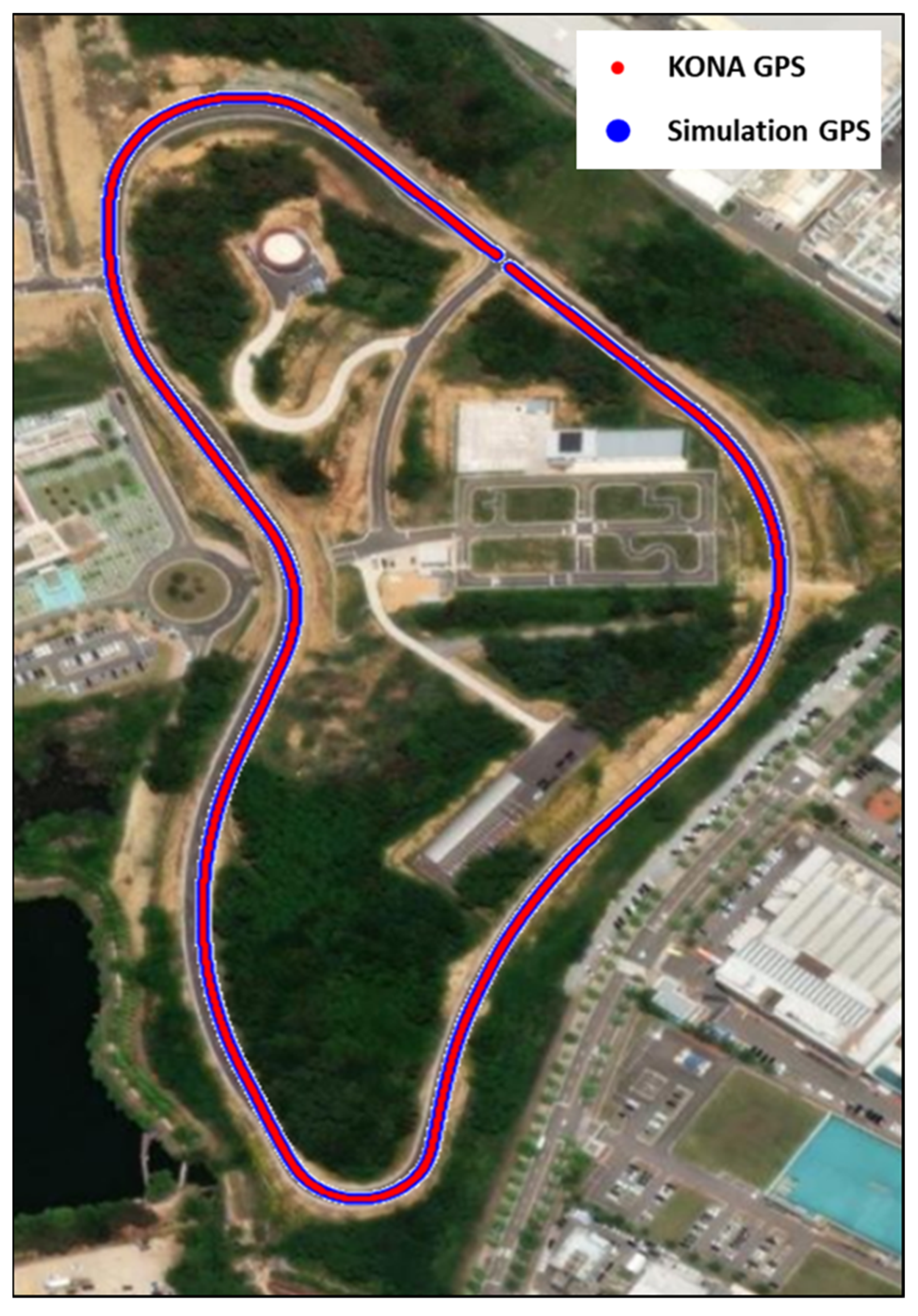
3.1. Driving Test
3.2. Data Transmission
3.3. Latency
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bagloee, S.A.; Tavana, M.; Asadi, M.; Oliver, T. Autonomous Vehicles: Challenges, Opportunities, and Future Implications for Transportation Policies. J. Mod. Transp. 2016, 24, 284–303. [Google Scholar] [CrossRef]
- Huang, Y.; Chen, Y.; Yang, Z. An Overview about Emerging Technologies of Autonomous Driving. arXiv 2023, arXiv:2306.13302. [Google Scholar]
- Ma, W.-C.; Tartavull, I.; Bârsan, I.A.; Wang, S.; Bai, M.; Mattyus, G.; Homayounfar, N.; Lakshmikanth, S.K.; Pokrovsky, A.; Urtasun, R. Exploiting Sparse Semantic HD Maps for Self-Driving Vehicle Localization. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019. [Google Scholar]
- Lee, W.; Kee, S.-C. Implementation of VILS Systems for Autonomous Driving Testbed Based on HD Map. Trans. Korean Soc. Automot. Eng. 2023, 31, 503–511. [Google Scholar] [CrossRef]
- Ghallabi, F.; El-Haj-Shhade, G.; Mittet, M.-A.; Nashashibi, F. LIDAR-Based Road Signs Detection For Vehicle Localization in an HD Map. In Proceedings of the 2019 IEEE Intelligent Vehicles Symposium (IV), Paris, France, 9–12 June 2019; pp. 1484–1490. [Google Scholar]
- Wang, R.; Wang, Z.; Xu, Z.; Wang, C.; Li, Q.; Zhang, Y.; Li, H. A Real-Time Object Detector for Autonomous Vehicles Based on YOLOv4. Comput. Intell. Neurosci. 2021, 2021, 9218137. [Google Scholar] [CrossRef] [PubMed]
- Kang, J.; Tariq, S.; Oh, H.; Woo, S.S. A Survey of Deep Learning-Based Object Detection Methods and Datasets for Overhead Imagery. IEEE Access 2022, 10, 20118–20134. [Google Scholar] [CrossRef]
- On-Road Automated Driving (ORAD) Committee. Taxonomy and Definitions for Terms Related to On-Road Motor Vehicle Automated Driving Systems; SAE International: Warrendale, PA, USA, 2014. [Google Scholar]
- Wang, J.; Huang, H.; Li, K.; Li, J. Towards the Unified Principles for Level 5 Autonomous Vehicles. Engineering 2021, 7, 1313–1325. [Google Scholar] [CrossRef]
- Neumeier, S.; Walelgne, E.A.; Bajpai, V.; Ott, J.; Facchi, C. Measuring the Feasibility of Teleoperated Driving in Mobile Networks. In Proceedings of the 2019 Network Traffic Measurement and Analysis Conference (TMA), Paris, France, 19–21 June 2019; pp. 113–120. [Google Scholar]
- Stefan, N.; Nicolas, G.; Clemens, D.; Christian, F. On the Way to Autonomous Vehicles Teleoperated Driving; VDE: Dortmund, Germany, 2018. [Google Scholar]
- Prasad, B.K.; Adarsh, S.; Shinde, M. 5G Based Remote Control of Autonomous Vehicle. In Proceedings of the 2023 IEEE 3rd Mysore Sub Section International Conference (MysuruCon), Hassan, India, 1–2 December 2023; pp. 1–6. [Google Scholar]
- Mutzenich, C.; Durant, S.; Helman, S.; Dalton, P. Updating Our Understanding of Situation Awareness in Relation to Remote Operators of Autonomous Vehicles. Cogn. Res. Princ. Implic. 2021, 6, 9. [Google Scholar] [CrossRef] [PubMed]
- 5GAA Automotive Association. 5GAA White Paper: C-V2X Use Cases Volume II; 5GAA: München, Germany, 2020. [Google Scholar]
- 5GAA Automotive Association. 5GAA White Paper: Tele-Operated Driving Use Cases, System Architecture and Business Considerations; 5GAA: München, Germany, 2021. [Google Scholar]
- Hakak, S.; Gadekallu, T.R.; Maddikunta, P.K.R.; Ramu, S.P.; Parimala, M.; De Alwis, C.; Liyanage, M. Autonomous Vehicles in 5G and beyond: A Survey. Veh. Commun. 2023, 39, 100551. [Google Scholar] [CrossRef]
- Lucas-Estañ, M.C.; Coll-Perales, B.; Khan, M.I.; Avedisov, S.S.; Altintas, O.; Gozalvez, J.; Sepulcre, M. Support of Teleoperated Driving with 5G Networks. In Proceedings of the 2023 IEEE 98th Vehicular Technology Conference (VTC2023-Fall), Hong Kong, China, 10–13 October 2023; pp. 1–6. [Google Scholar]
- Kim, S. Network Requirement in Teleoperation of Autonomous Vehicle. Trans. Korean Soc. Automot. Eng. 2023, 31, 239–246. [Google Scholar] [CrossRef]
- Pérez, P.; Ruiz, J.; Benito, I.; López, R. A Parametric Quality Model to Evaluate the Performance of Tele-Operated Driving Services over 5G Networks. Multimed. Tools Appl. 2022, 81, 12287–12303. [Google Scholar] [CrossRef]
- Hu, Z.; Su, R.; Wang, Y.; Wang, B.; Huang, L.; Lu, Y. Security Enhancement for Longitudinal Vehicle Platooning Under Denial-of-Service Attacks: From Resilient Controller Design Perspective. IFAC-Pap. 2023, 56, 1088–1093. [Google Scholar] [CrossRef]
- Yang, Y.; Hua, K. Emerging Technologies for 5G-Enabled Vehicular Networks. IEEE Access 2019, 7, 181117–181141. [Google Scholar] [CrossRef]
- Bhatti, G.; Mohan, H.; Raja Singh, R. Towards the Future of Smart Electric Vehicles: Digital Twin Technology. Renew. Sustain. Energy Rev. 2021, 141, 110801. [Google Scholar] [CrossRef]
- Piromalis, D.; Kantaros, A. Digital Twins in the Automotive Industry: The Road toward Physical-Digital Convergence. Appl. Syst. Innov. 2022, 5, 65. [Google Scholar] [CrossRef]
- Dygalo, V.; Keller, A.; Shcherbin, A. Principles of Application of Virtual and Physical Simulation Technology in Production of Digital Twin of Active Vehicle Safety Systems. Transp. Res. Procedia 2020, 50, 121–129. [Google Scholar] [CrossRef]
- Wang, Z.; Liao, X.; Zhao, X.; Han, K.; Tiwari, P.; Barth, M.J.; Wu, G. A Digital Twin Paradigm: Vehicle-to-Cloud Based Advanced Driver Assistance Systems. In Proceedings of the 2020 IEEE 91st Vehicular Technology Conference (VTC2020-Spring), Antwerp, Belgium, 25–28 May 2020; pp. 1–6. [Google Scholar]
- Hu, Z.; Lou, S.; Xing, Y.; Wang, X.; Cao, D.; Lv, C. Review and Perspectives on Driver Digital Twin and Its Enabling Technologies for Intelligent Vehicles. IEEE Trans. Intell. Veh. 2022, 7, 417–440. [Google Scholar] [CrossRef]
- Tener, F.; Lanir, J. Driving from a Distance: Challenges and Guidelines for Autonomous Vehicle Teleoperation Interfaces. In Proceedings of the CHI Conference on Human Factors in Computing Systems, New Orleans, LA, USA, 29 April 2022; pp. 1–13. [Google Scholar]
- Lee, S.; Lee, J.; Kee, S.-C. Teleoperated Valet Parking System Using AVM Camera. Trans. Korean Soc. Automot. Eng. 2023, 31, 395–401. [Google Scholar] [CrossRef]
- Zhao, P.; Chen, J.; Song, Y.; Tao, X.; Xu, T.; Mei, T. Design of a Control System for an Autonomous Vehicle Based on Adaptive-PID. Int. J. Adv. Robot. Syst. 2012, 9, 44. [Google Scholar] [CrossRef]
- SCRC: Smart Car Research Center. Available online: https://cbnuscrc.org/ (accessed on 1 February 2016).
- Yu, Y.; Lee, S. Remote Driving Control with Real-Time Video Streaming Over Wireless Networks: Design and Evaluation. IEEE Access 2022, 10, 64920–64932. [Google Scholar] [CrossRef]
- Madhuri, D.; Reddy, P.C. Performance Comparison of TCP, UDP and SCTP in a Wired Network. In Proceedings of the 2016 International Conference on Communication and Electronics Systems (ICCES), Coimbatore, India, 21–22 October 2016; pp. 1–6. [Google Scholar]
- Ranaldo, N.; Rapuano, S.; Riccio, M.; Zoino, F. On the Use of Video-Streaming Technologies for Remote Monitoring of Instrumentation. In Proceedings of the 2006 IEEE Instrumentation and Measurement Technology Conference Proceedings, Sorrento, Italy, 24–27 April 2006; pp. 861–866. [Google Scholar]
- Huang, S.; Xie, J. DAVE: Dynamic Adaptive Video Encoding for Real-Time Video Streaming Applications. In Proceedings of the 2021 18th Annual IEEE International Conference on Sensing, Communication, and Networking (SECON), Rome, Italy, 6–9 July 2021; pp. 1–9. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
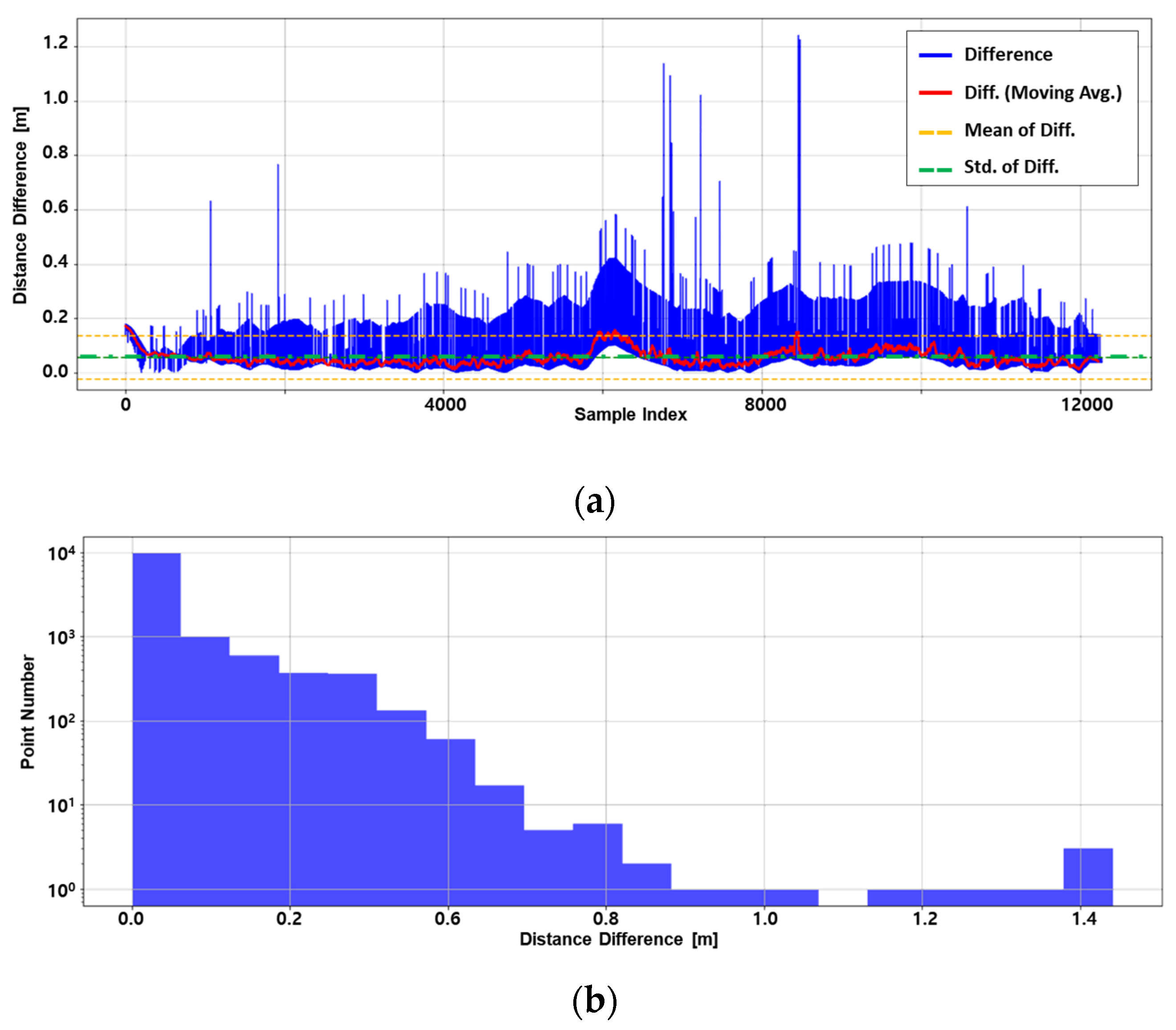
| Coordinate Difference [m] | Average | Median | Standard Deviation |
|---|---|---|---|
| Expressway | 0.05650 | 0.02742 | 0.08014 |
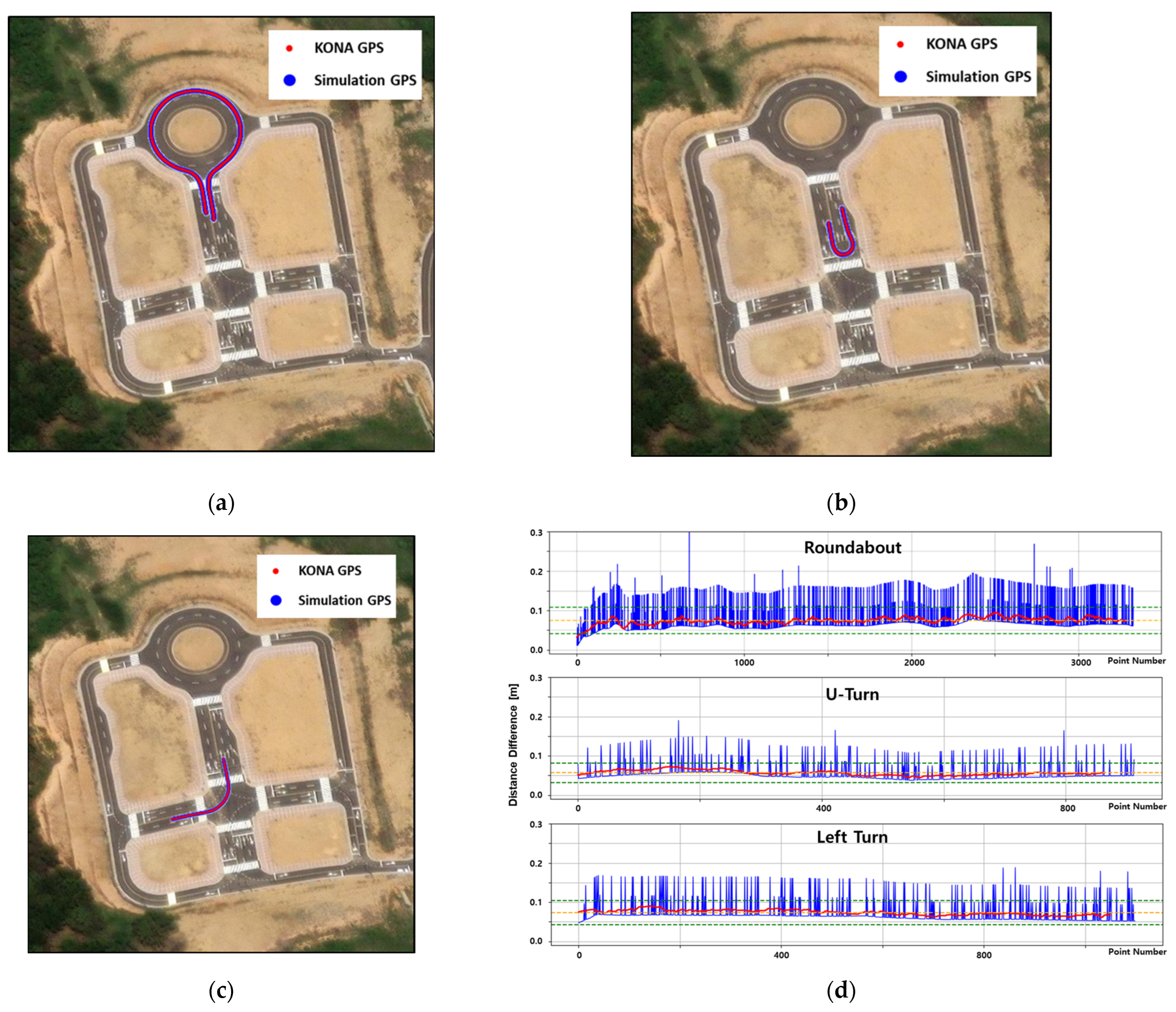
| Roundabout | 0.07420 | 0.06251 | 0.03379 |
| U-Turn | 0.05654 | 0.04742 | 0.02454 |
| Left Turn | 0.07361 | 0.06450 | 0.03066 |
| Transmission Medium | Data Packet [Byte] | Transmission Rate [bps] | Control Latency [s] | Video/ Visualizing Latency [ms] | Frame Rate [FPS] | |
|---|---|---|---|---|---|---|
| Traditional ToD | Video Streaming | Variable | 1 M | 0.0312 | 32.5 | 30.38 |
| Virtual Twin ToD | Message | 63 | 25 K | 0.0312 | 4.5 | 50 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, K.; Kee, S.-C. Teleoperated Driving with Virtual Twin Technology: A Simulator-Based Approach. World Electr. Veh. J. 2024, 15, 311. https://doi.org/10.3390/wevj15070311
Kim K, Kee S-C. Teleoperated Driving with Virtual Twin Technology: A Simulator-Based Approach. World Electric Vehicle Journal. 2024; 15(7):311. https://doi.org/10.3390/wevj15070311
Chicago/Turabian StyleKim, Keonil, and Seok-Cheol Kee. 2024. "Teleoperated Driving with Virtual Twin Technology: A Simulator-Based Approach" World Electric Vehicle Journal 15, no. 7: 311. https://doi.org/10.3390/wevj15070311