

Analysis and Suppression of Spoke-Type Permanent Magnet Machines Cogging Torque with Different Conditions for Electric Vehicles

Abstract
:1. Introduction
2. Theoretical Analysis of Cogging Torque
2.1. Machine Topology
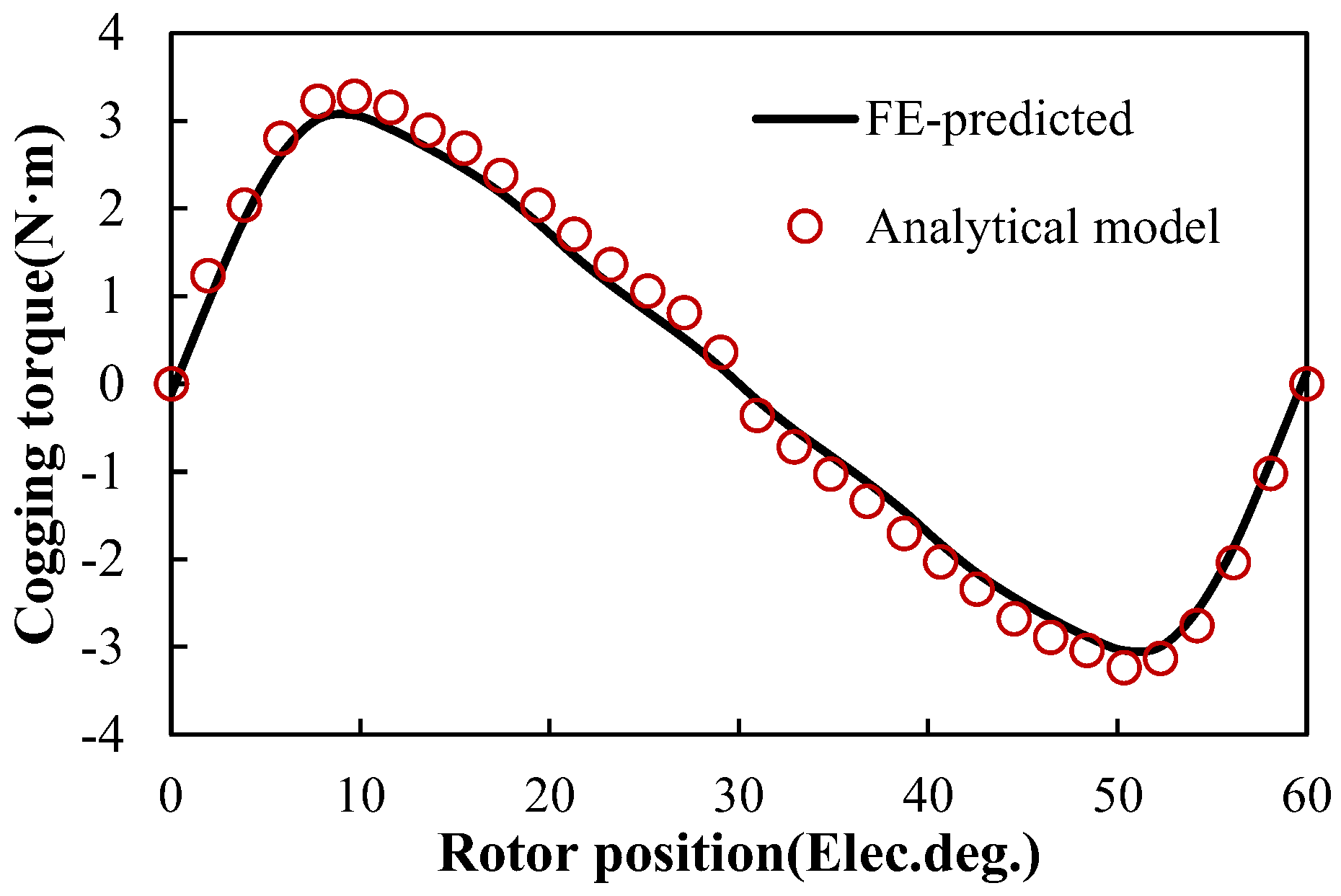
2.2. Analytical Model of Cogging Torque
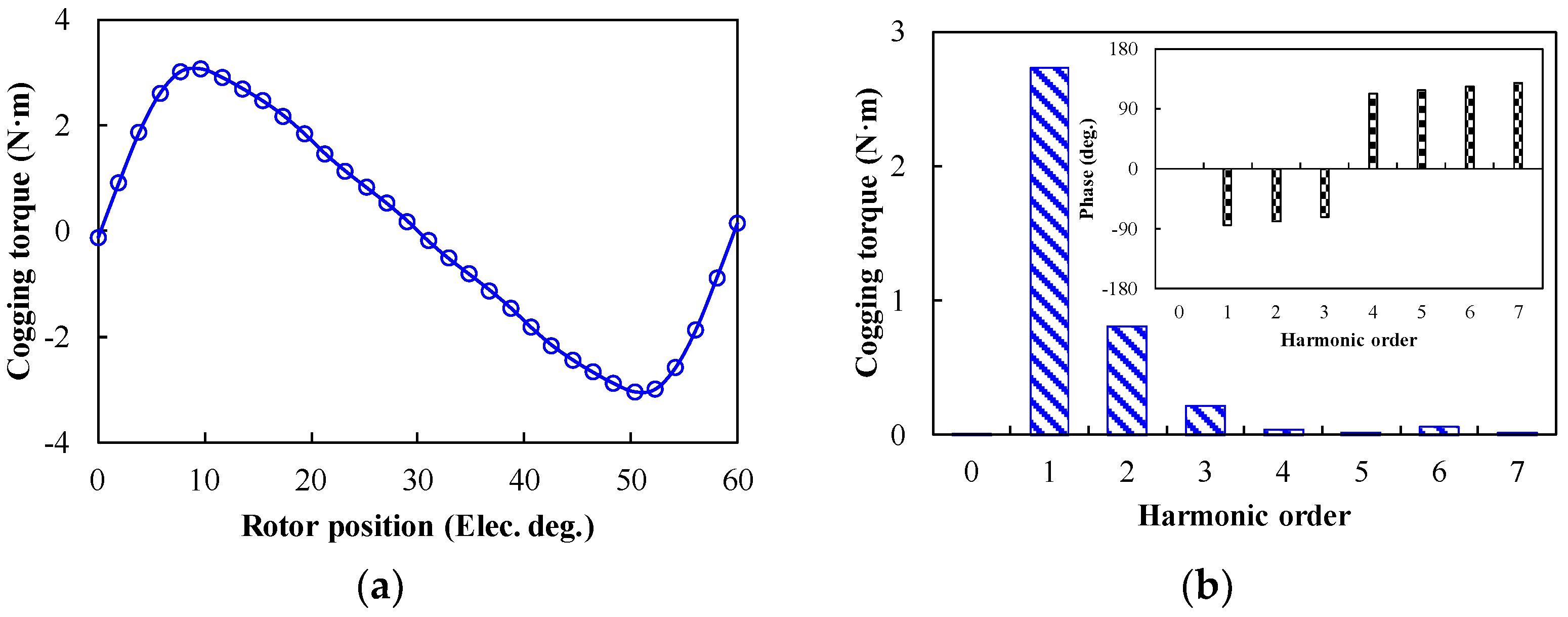
2.3. Harmonics Analysis of Cogging Torque
3. Suppression of Cogging Torque
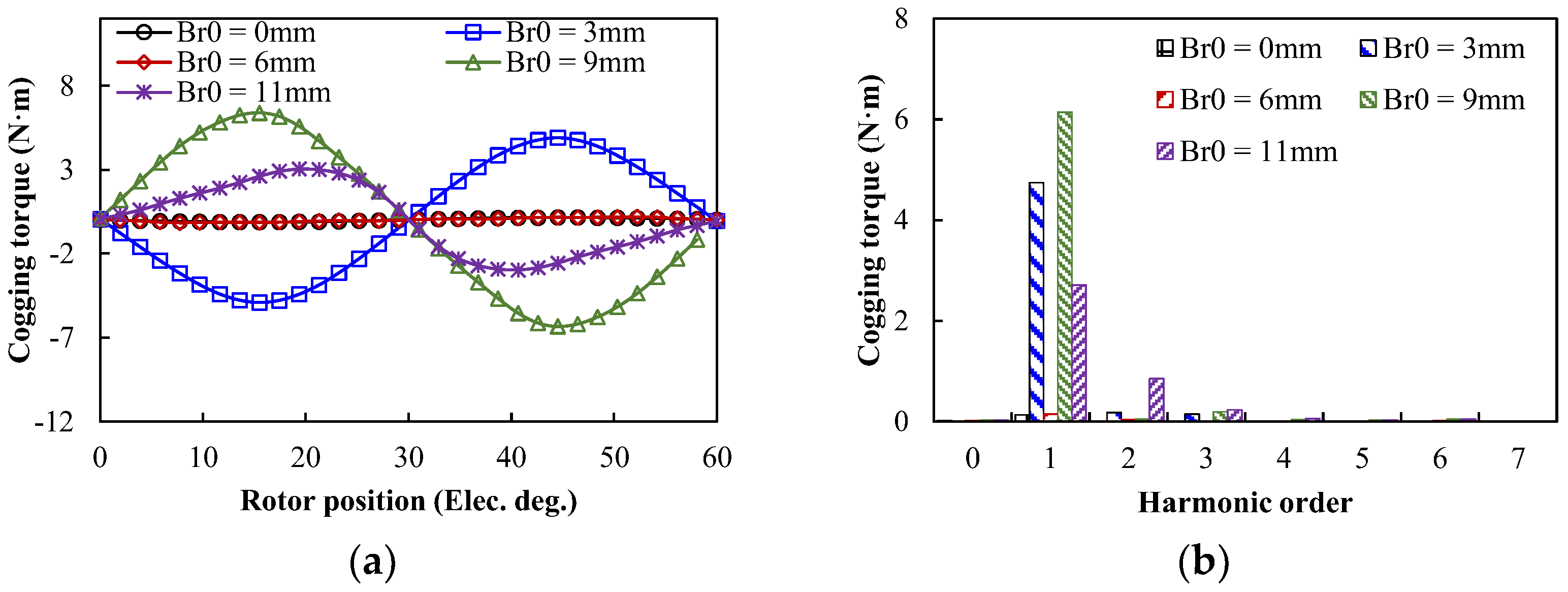
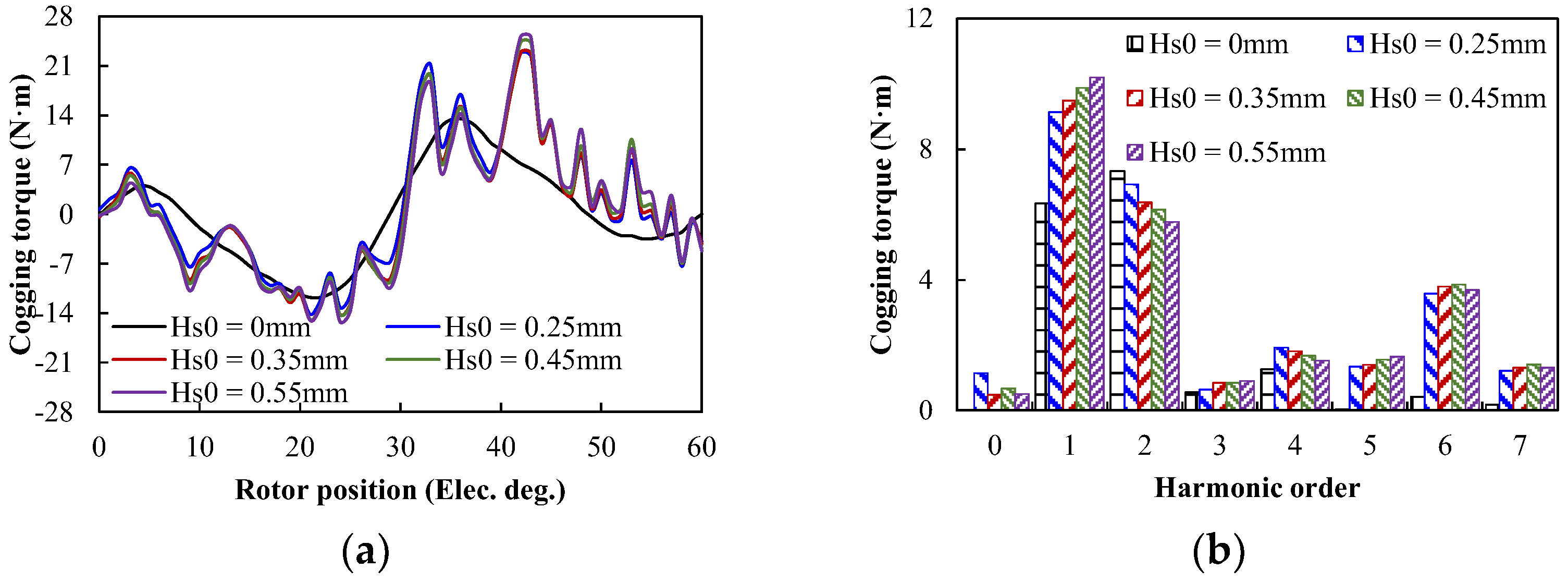
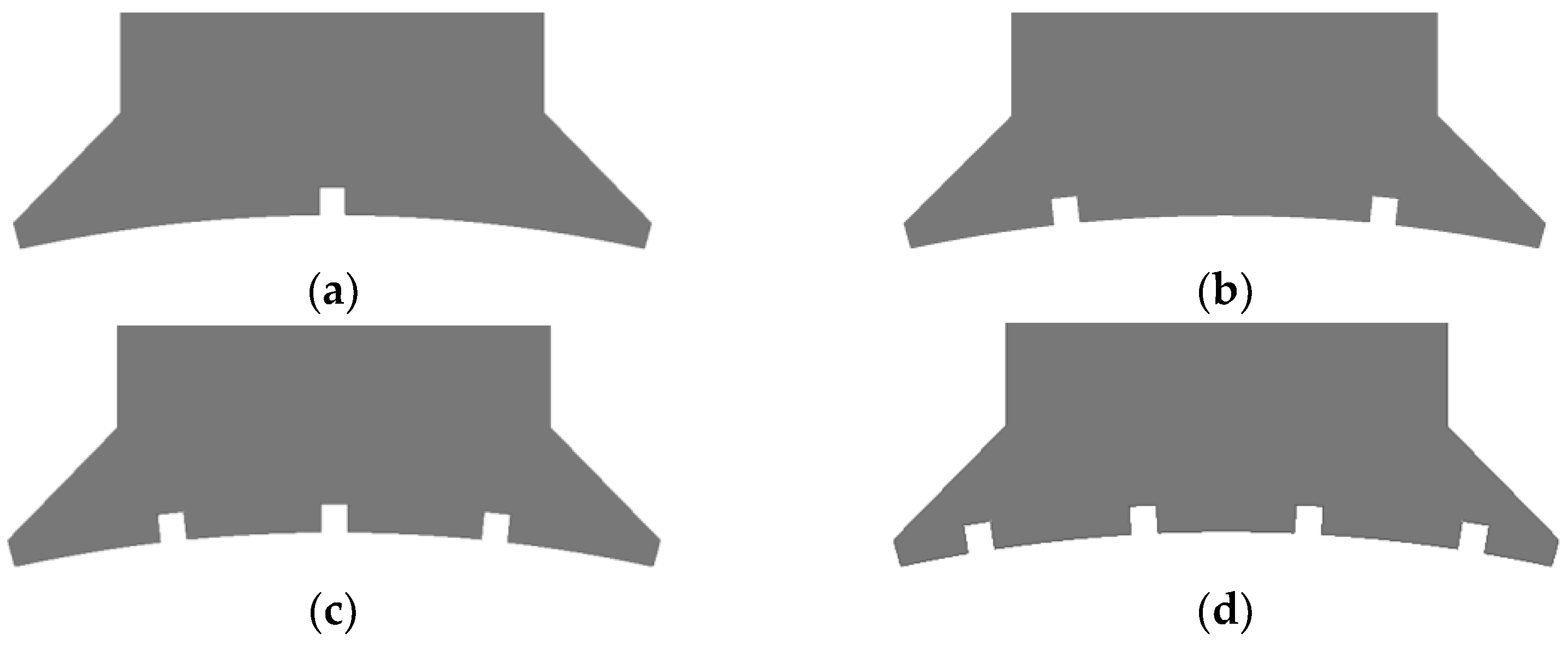
3.1. Rotor Slotting Width
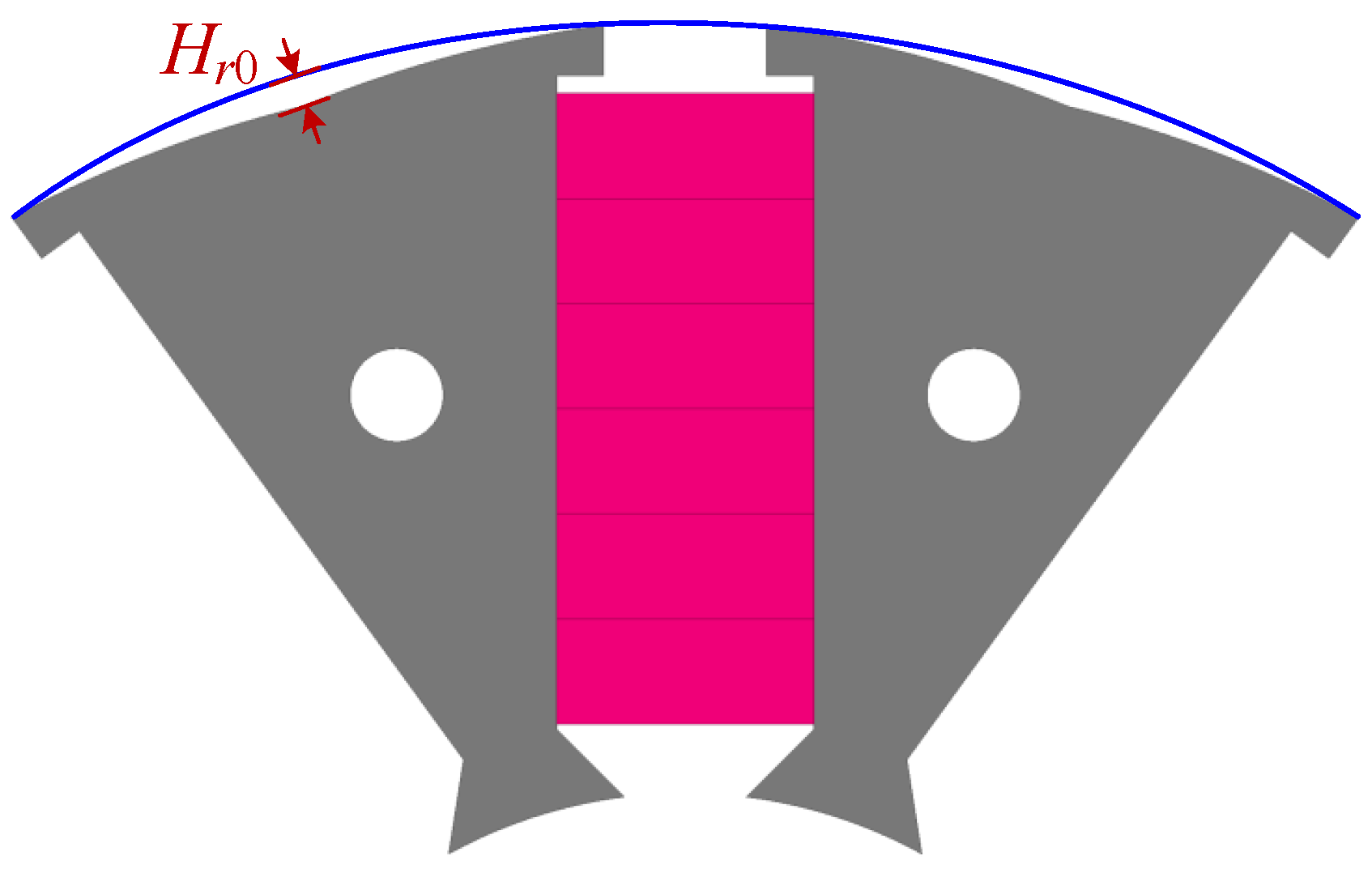
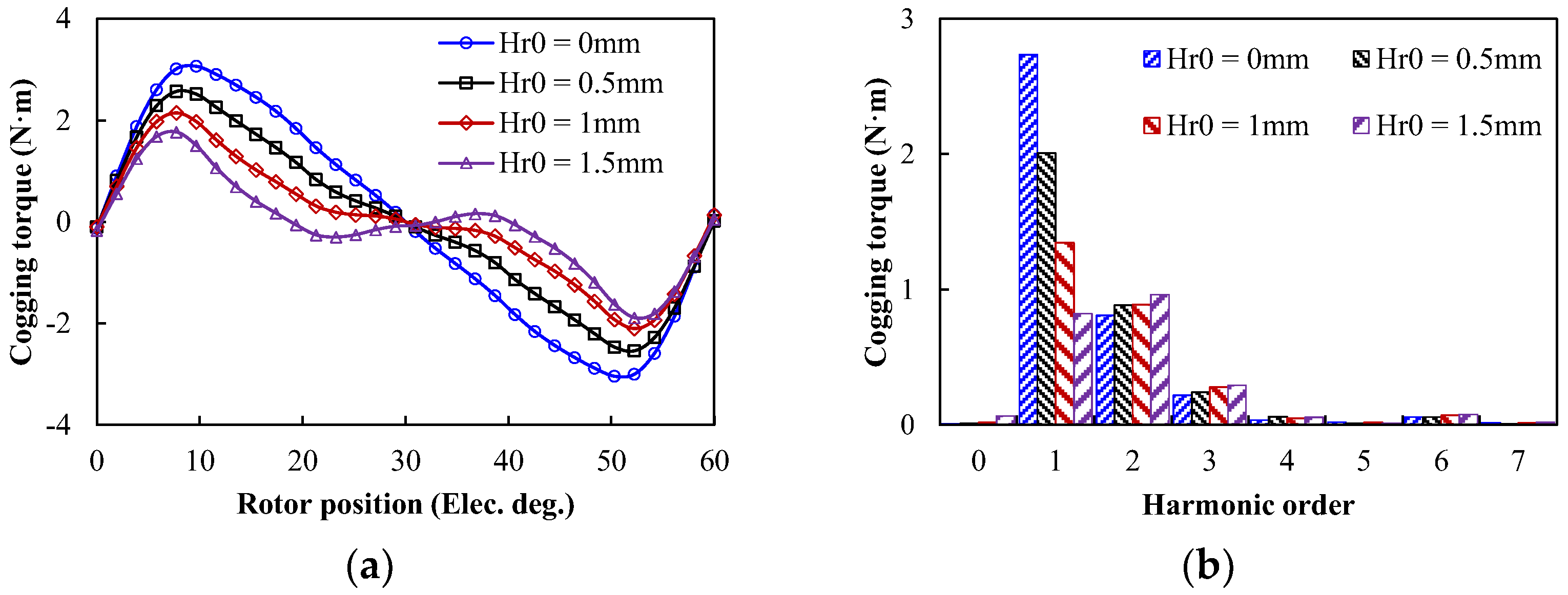
3.2. Uneven Rotor Core
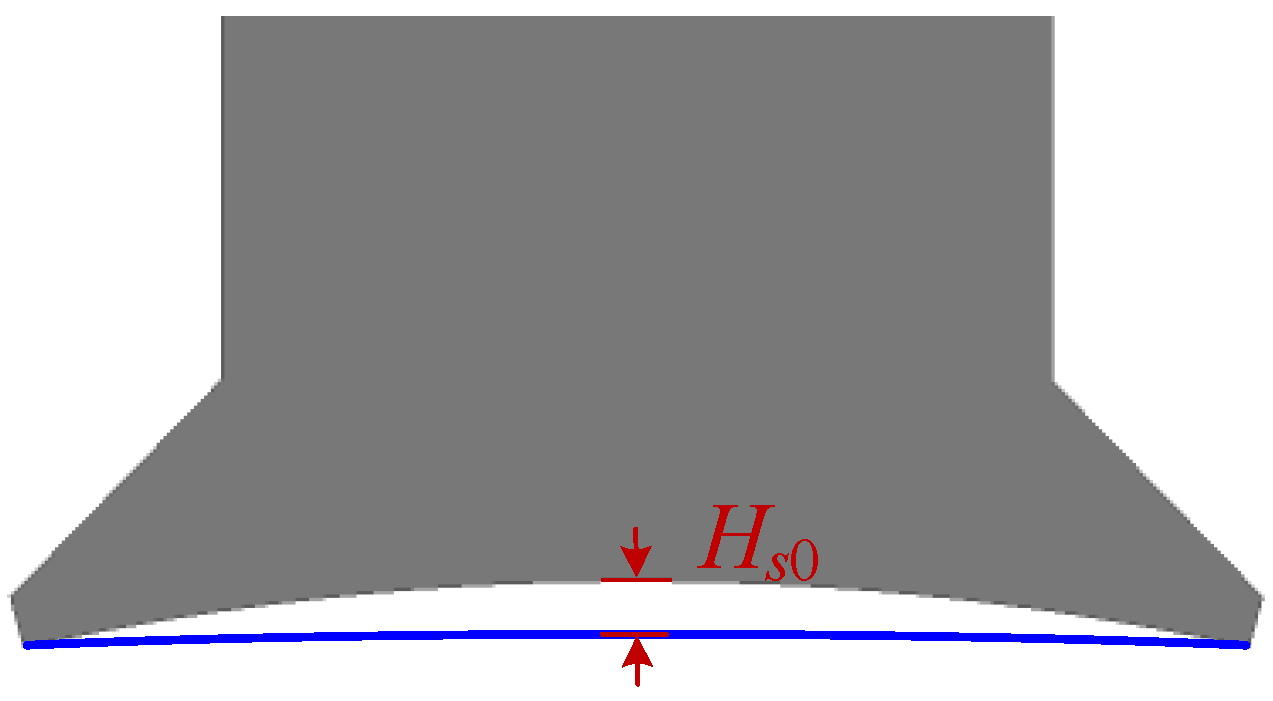
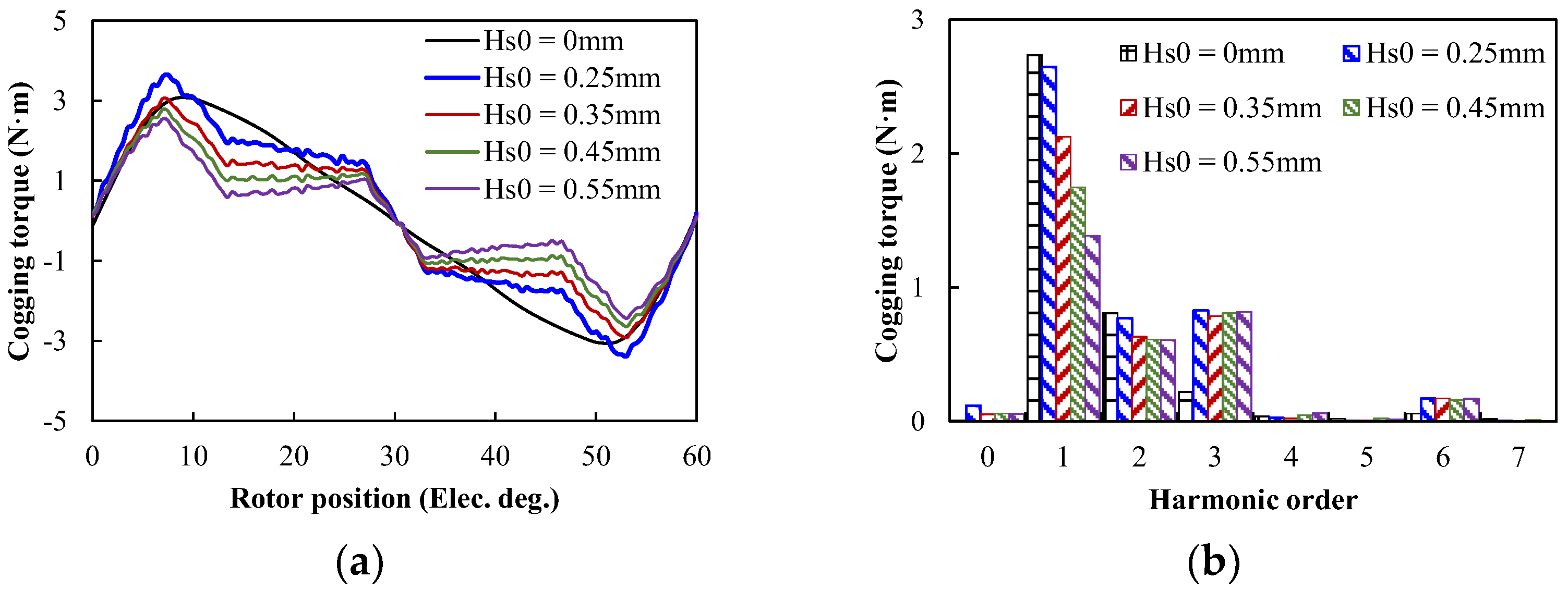
3.3. Uneven Stator Core
3.4. Stator Auxiliary Slotting
4. Experiment Validation
4.1. No-Load Performance
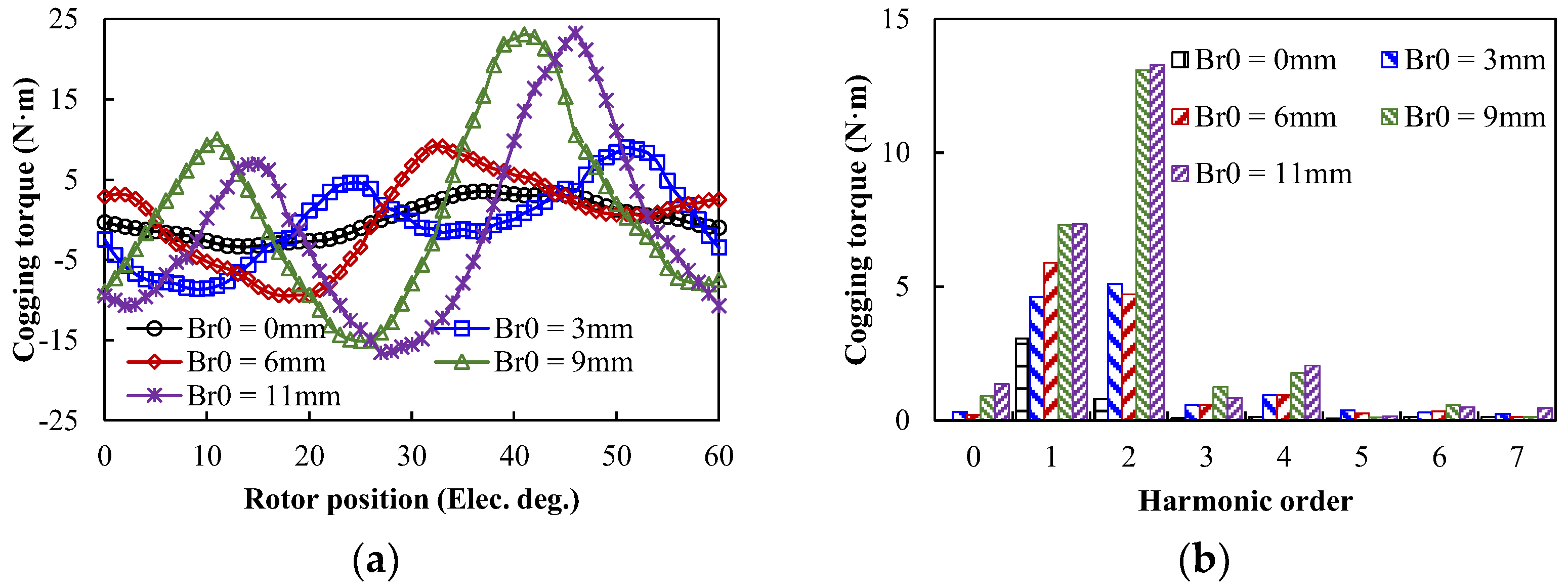
4.2. On-Load Performance
5. Conclusions
- (1)
- The cogging torque of the STPM machine is not only affected by stator slots but also significantly influenced by rotor slots. It is possible to minimize the cogging torque in STPM machine by selecting the proper rotor slot opening width.
- (2)
- The work condition shows a great influence on harmonic amplitudes of cogging torques due to magnetic saturation, and the no-load cogging torque is mainly caused by fundamental, but the on-load cogging torque is mainly caused by the 2nd harmonic and 3rd harmonic.
- (3)
- The suitable rotor slot width can suppress the harmonic content of cogging torque under different conditions, and the stator auxiliary slot can reduce the fundamental content under different conditions.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Bilgin, B.; Liang, J.; Terzic, M.V.; Dong, J.; Rodriguez, R.; Trickett, E.; Emadi, A. Modeling and analysis of electric motors: State-of-the-art review. IEEE Trans. Transp. Electrif. 2019, 5, 602–617. [Google Scholar] [CrossRef]
- Gao, M.; Ren, J.; Hu, W.; Han, Y.; Geng, H.; Yan, S.; Xu, M. Armature Reaction Analysis and Performance Optimization of Hybrid Excitation Starter Generator for Electric Vehicle Range Extender. World Electr. Veh. J. 2023, 14, 286. [Google Scholar] [CrossRef]
- Yu, Y.; Pei, Y.; Chai, F.; Doppelbauer, M. Performance Comparison Between Permanent Magnet Synchronous Motor and Vernier Motor for In-Wheel Direct Drive. IEEE Trans. Ind. Electron. 2023, 70, 7761–7772. [Google Scholar] [CrossRef]
- Zhou, X.; Zhu, X.; Wu, W.; Xiang, Z.; Liu, Y.; Quan, L. Multi-objective Optimization Design of Variable-Saliency-Ratio PM Motor Considering Driving Cycles. IEEE Trans. Ind. Electron. 2021, 68, 6516–6526. [Google Scholar] [CrossRef]
- Wu, Z.Z.; Zhu, Z.Q.; Zhan, H.L. Comparative Analysis of Partitioned Stator Flux Reversal PM Machines Having Fractional-Slot Nonoverlapping and Integer-Slot Overlapping Windings. IEEE Trans. Energy Convers. 2016, 31, 776–788. [Google Scholar] [CrossRef]
- Zhao, W.; Chen, D.; Lipo, T.A.; Kwon, B.I. Dual Airgap Stator and Rotor-Permanent Magnet Machines with Spoke-type Configurations Using Phase-group Concentrated Coil Windings. IEEE Trans. Ind. Appl. 2017, 53, 3327–3335. [Google Scholar] [CrossRef]
- Kimiabeigi, M.; Long, R.; Widmer, J.D.; Gao, Y. Comparative Assessment of Single Piece and Fir-Tree-Based Spoke Type Rotor Designs for Low-cost Electric Vehicle Application. IEEE Trans. Energy Convers. 2017, 32, 486–494. [Google Scholar] [CrossRef]
- Fatemi, A.; Ionel, D.M.; Popescu, M.; Chong, Y.C.; Demerdash, N.A. Design Optimization of a High Torque Density Spoke-Type PM Motor for a Formula E Race Drive Cycle. IEEE Trans. Ind. Appl. 2018, 54, 4343–4354. [Google Scholar] [CrossRef]
- Galioto, S.J.; Reddy, P.B.; El-Refaie, A.M.; Alexander, J.P. Effect of magnet types on performance of high speed spoke interior permanent magnet machines designed for traction applications. IEEE Trans. Ind. Appl. 2014, 51, 2148–2160. [Google Scholar] [CrossRef]
- Muthusamy, M.; Hendershot, J.; Pillay, P. Design of a Spoke Type PMSM With SMC Stator Core for Traction Applications. IEEE Trans. Ind. Appl. 2023, 59, 1418–1436. [Google Scholar] [CrossRef]
- Liu, G.; Wang, Y.; Chen, Q.; Xu, G.; Song, C. Multiobjective Deterministic and Robust Optimization Design of a New Spoke-Type Permanent Magnet Machine for the Improvement of Torque Performance. IEEE Trans. Ind. Electron. 2020, 67, 10202–10212. [Google Scholar] [CrossRef]
- Huynh, T.A.; Che, V.H.; Hsieh, M.F. Maximization of High-Efficiency Operating Range of Spoke-Type PM E-Bike Motor by Optimization Through New Motor Constant. IEEE Trans. Ind. Appl. 2023, 59, 1328–1339. [Google Scholar] [CrossRef]
- Luu, T.P.; Choi, S.K.; Park, S.Y.; Lee, J.Y. Effect of Manufacturing Tolerances on Cogging Torque of Spoke-type Permanent Magnet Synchronous Motor. In Proceedings of the 2021 24th International Conference on Electrical Machines and Systems (ICEMS), Gyeongju, Korea, 19–21 November 2021; pp. 1054–1059. [Google Scholar]
- Zhao, W.; Lipo, T.A.; Kwon, B.I. Torque Pulsation Minimization in Spoke-type Interior Permanent Magnet Motors With Skewing and Sinusoidal Permanent Magnet Configurations. IEEE Trans. Magn. 2015, 51, 8110804. [Google Scholar] [CrossRef]
- Zhao, W.; Kwon, J.W.; Wang, X.; Lipo, T.A.; Kwon, B.I. Optimal Design of a Spoke-type Permanent Magnet Motor with Phase-group Concentrated-coil Windings to Minimize Torque Pulsations. IEEE Trans. Magn. 2017, 53, 8104604. [Google Scholar] [CrossRef]
- Xiao, Y.; Zhu, Z.Q.; Jewell, G.W.; Chen, J.T.; Wu, D.; Gong, L.M. A Novel Asymmetric Interior Permanent Magnet Synchronous Machine. IEEE Trans. Ind. Appl. 2022, 58, 3370–3382. [Google Scholar] [CrossRef]
- Tang, X.; Wang, X.; Sun, S.; Zhao, J. Analytical Analysis and Study of Reduction Methods of Cogging Torque in Line-start Permanent Magnet Synchronous Motors. Proc. CSEE 2016, 36, 1395–1403. [Google Scholar]
- Zhu, Z.Q.; Howe, D. Instantaneous Magnetic Field Distribution in Brushless Permanent Magnet DC Motors. III. Effect of Stator Slotting. IEEE Trans. Magn. 1993, 29, 143–151. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value | Parameters | Value |
|---|---|---|---|
| Rated power (kW) | 40 | Peak power (kW) | 80 |
| Rated torque (N·m) | 160 | Peak torque (N·m) | 300 |
| PM thickness (mm) | 11 | PM width (mm) | 17 |
| Outer diameter (mm) | 180 | Inner diameter (mm) | 120 |
| Stack length (mm) | 180 | Air-gap length (mm) | 1 |
| Turns per coil | 6 | Stator slots | 12 |
| Pole pair | 5 | Number of phases | 3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, J.; Wang, C. Analysis and Suppression of Spoke-Type Permanent Magnet Machines Cogging Torque with Different Conditions for Electric Vehicles. World Electr. Veh. J. 2024, 15, 376. https://doi.org/10.3390/wevj15080376
Huang J, Wang C. Analysis and Suppression of Spoke-Type Permanent Magnet Machines Cogging Torque with Different Conditions for Electric Vehicles. World Electric Vehicle Journal. 2024; 15(8):376. https://doi.org/10.3390/wevj15080376
Chicago/Turabian StyleHuang, Jinlin, and Chen Wang. 2024. "Analysis and Suppression of Spoke-Type Permanent Magnet Machines Cogging Torque with Different Conditions for Electric Vehicles" World Electric Vehicle Journal 15, no. 8: 376. https://doi.org/10.3390/wevj15080376