
A Novel Multi Level Dynamic Decomposition Based Coordinated Control of Electric Vehicles in Multimicrogrids

 ,
,  ,
,  , and
, and 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- The proposed control approach is based on the decomposition principle. This imparts a certain level of independence to the controllers at different levels of the hierarchy. If one controller fails, other controllers continue to work;
- The proposed control scheme is real-time in nature. Thus, it can handle uncertainties;
- The proposed control scheme intends to maximize the utilization of RESs, while meeting the load requirements within the available resources; thus, minimizing the operational costs and maximizing the load satisfaction;
- The proposed control scheme provides a comprehensive control of EVs, keeping MMGs in view with five different modes of operation, as mentioned below:
- –
- Minimum time charging mode of operation;
- –
- Minimum time fixed cost charging mode of operation;
- –
- Minimum cost charging mode of operation;
- –
- Maximum SoC fixed cost charging mode of operation;
- –
- Grid support mode of operation;
- The proposed control scheme is generalized with respect to different types of EVs and optimization techniques for their scheduling;
- The proposed control scheme is modular as far as the number of EVs is concerned;
- The proposed control scheme supports plug and play capability for EVs;
- The proposed control scheme makes possible the utilization of simple computational resources with dynamic-decomposition-based hierarchical control;
- The proposed control scheme intends to minimize the exchange of information, to ensure the maximum possible privacy for EVs.
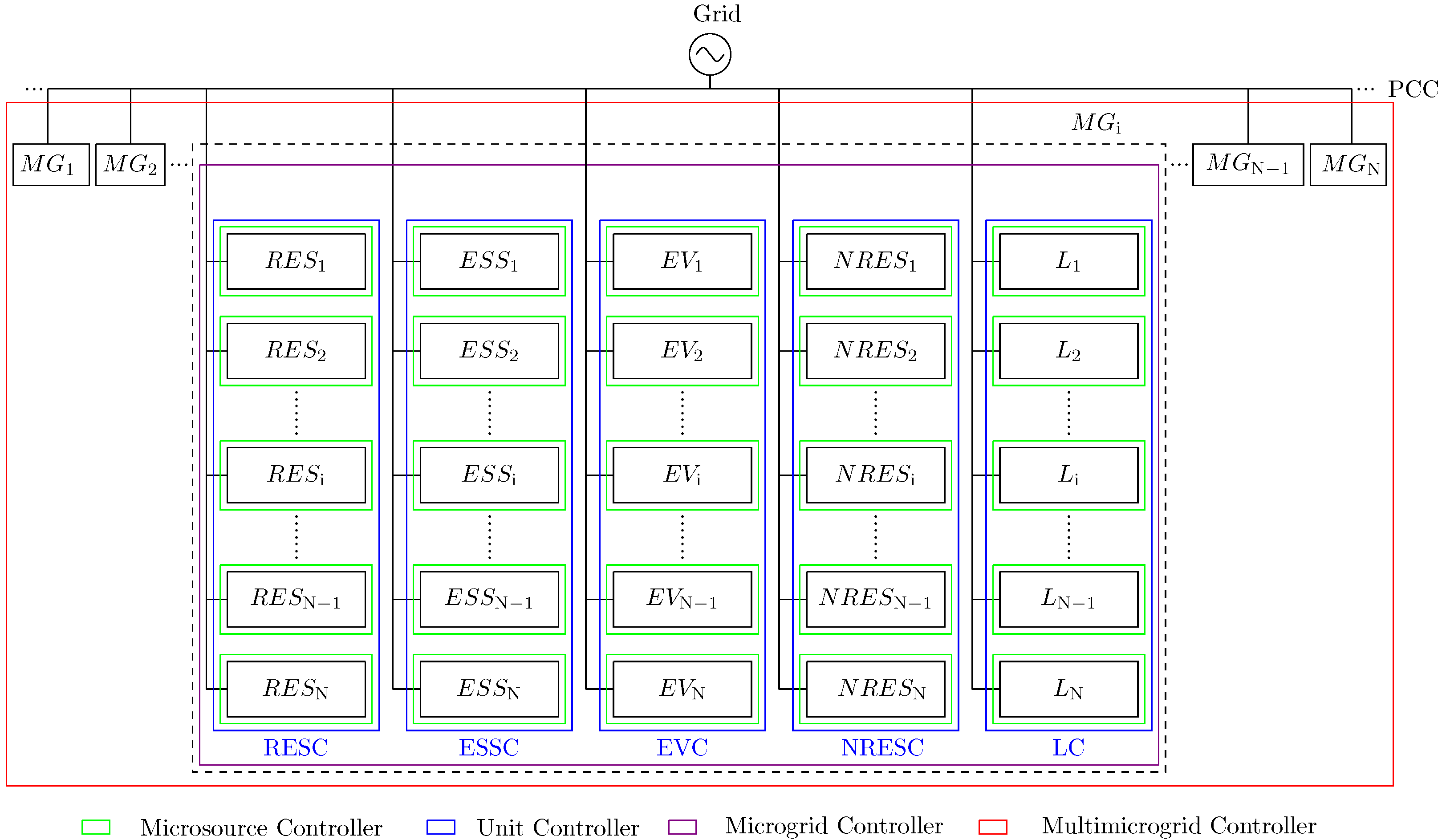
2. Proposed Control Methodology
2.1. Multimicrogrid Controller (MMGC)
| Algorithm 1 Proposed MMGC Algorithm | |
|
|
- If the RESs available at the MMGC are sufficient to provide the deficiency of the MG under consideration, the MMGC allocates RESs of nearby MGs to satisfy the demand. First of all, the closest MG is considered. If it is able to meet the demand, its coordination power is increased by a value equal to the required power (i.e., ) and the coordination power of the MG under consideration is decreased by the same amount (i.e., ). Here, represents the nearby MG. In this way, the MGC of the MG under consideration is relieved from dispatching the unsatisfiable load and that load is shifted towards the nearby MG that has sufficient RESs to supply the required load. If the nearby MG is unable to completely supply the required load, its coordination power is increased by an amount equal to the available RESs (i.e., ) and the coordination power of the MG under consideration is decreased by the same amount (i.e., ). After that, the MMGC goes to the next available MG, to see if it has the ability to satisfy the remaining load demand. This process goes on until the required load is satisfied.
- If the required load cannot be satisfied by the RESs available at the MMGC level, but RESs and EVs combined are able to provide the required load (i.e., ), the MMGC orders the MGCs of all the MGs to dispatch RESs that can be made available at MMG level. This is achieved by decreasing by an amount equal to the i.e., . The coordination powers of all the other MGs are increased by their respective RES capacities available at the MMG. After that, the EVs are dispatched in order of their proximity, to satisfy the remaining load. The closest MG is considered first to supply the load and, if capable, its coordination power is increased accordingly (i.e., ) and the coordination power of the MG under consideration is decreased accordingly (i.e., ). If the EVs in the nearby MG are unable to supply the required load completely, all the EVs in that MG are dispatched to their full capacity and the next closest MG is considered. This is achieved by increasing the coordination power of the closest MG by (i.e., ) and decreasing the coordination power of the MG under consideration by (i.e., ). This process goes on and until the MG under consideration is supplied to its requirements.
- If the required load cannot be satisfied by RESs and EVs, but the incorporation of the ESSs along with RESs and EVs is sufficient to supply the load (i.e., ), the MMGC coordinates all the MGCs to fully dispatch their RESs and EVs. The coordination power of the MG under consideration is decreased accordingly (i.e., ) and the coordination power of each of the nearby MGs is increased by an amount equal to the RES and EV resources available at MMG level (i.e., ). After that, the MMGC checks the available ESS capacity from each MGC, in order of their geographical proximity. If the nearby MG is able to supply the difference, its MGC is dispatched accordingly. This is achieved by decreasing the coordination power of the MG under consideration by an amount equal to its requirement (i.e., ) and increasing the coordination power of the nearby MG by the same amount (i.e., ). Otherwise, the MMGC allocates the available portion of the ESUs of the nearby MG to the MG under consideration. This is achieved by decreasing the coordination power of the MG under consideration by an amount equal to the ESU resources of the nearby MG available for MMG interaction (i.e., ) and increasing the coordination power of the nearby MG by the same amount (i.e., ). This process goes on until the load is satisfied.
- If the RESs, EVs, and ESSs available at MMG level are not able to supply the load, but the inclusion of NRESs available at MMG level is sufficient to satisfy the required load (i.e., ), the MMGC asks the MGC of all MGs to completely dispatch the MMG available capacity of their RESs, EVs, and ESSs. The coordination power of the MG under consideration is decreased accordingly (i.e., ) and the coordination power of each of the nearby MGs is increased by an amount equal to the RES, EV, and ESU resources available at MMG level (i.e., ). After that, the MMGC checks the available NRES capacity from each MGC in order of their geographical proximity. If a nearby MG is able to supply the difference, its MGC is dispatched accordingly. This is achieved by decreasing the coordination power of the MG under consideration by an amount equal to its requirements (i.e., ) and increasing the coordination power of the nearby MG by the same amount (i.e., ). Otherwise, the MMGC allocates the available portion of the NRESs of the nearby MGs to the MG under consideration. This is achieved by decreasing the coordination power of the MG under consideration by an amount equal to the NRES resources of the nearby MG available for MMG interaction (i.e., ) and increasing the coordination power of the nearby MG by the same amount (i.e., ). This process goes on until the load is satisfied.
- If all the resources available at MMG level are not sufficient to supply the load, the MMGC orders the MGC to dispatch the available capacity of RESs, EVs, ESSs, and NRESs and the rest of the load is shed by the respective MGC. This is achieved by decreasing the coordination power of the MG under consideration by an amount equal to the capacity of the RESs, EVs, ESUs, and NRESs available at MMG level (i.e., ) and increasing the coordination power of the nearby MG by an amount equal to the capacity of the RESs, EVs, ESUs, and NRESs available at MMG level (i.e., ).
- If the RESs available at MMG level are sufficient to provide the required power (i.e., ), the MMGC checks the nearby MGs one by one. If the RESs available for the MMG level of a particular nearby MG are sufficient to meet the load demands, the MGC of that MG is instructed to increase the load by an amount equal to the load required. This is achieved by increasing the coordination powers of the nearby MG to a value equal to the load required (i.e., , ) and decreasing the coordination powers of the MG under consideration by the same value (i.e., , ). If this is not the case, the coordination powers of the nearby MG are increased by a ratio equal to the power factor of the required load (see Equations (1) and (2)).The coordination powers of the MG under consideration are decreased by the same value (see Equations (3) and (4)).In this way, all the contributing MGs supply the active and reactive powers with a uniform ratio.
- If the RESs are not sufficient to supply the required power, all the RESs available from the respective MGC are dispatched at the load power factor. This is achieved by setting the coordination powers of the nearby MGs according to Equations (5) and (6), and the coordination powers of the MG under consideration according to Equations (7) and (8).After using the RESs, the MMGC moves to EVs. If the EVs available for the MMG level of a particular nearby MG are sufficient to meet the active load demands, the coordination power of the nearby MG is increased to a value equal to the load required (i.e., ) and the coordination power of the MG under consideration is decreased by the same value (i.e., ). If this is not the case, the entire capacity of EVs available at MMG level is deployed to meet the active load demand of the MG under consideration. This is achieved by increasing the coordination power of the nearby MG by a value equal to the available EV resources (i.e., ) and decreasing the coordination power of the MG under consideration by the same value (i.e., ). In this way, the active load requirements are fulfilled and the MMGC moves towards reactive power scheduling. Since the RESs are depleted, the MMGC checks the ESSs and NRESs for reactive power support. If the ESSs are sufficient to meet the requirements, the ESSs of the nearby MGs are dispatched preferably from the nearby MGs. The coordination power of the nearby MG is increased to a value equal to the load required (i.e., ), and the coordination power of the MG under consideration is decreased by the same value (i.e., ). If the ESSs are not sufficient, all the ESUs are dispatched by increasing the coordination power of the nearby MG by a value equal to the available ESS resources (i.e., ) and decreasing the coordination power of the MG under consideration by the same value (i.e., ). If the ESSs are not sufficient to meet the load requirements alone, the MMGC checks the NRESs available from the MGCs. If the ESSs and NRESs are both able to meet the requirements, the ESUs of all the nearby MGs are fully utilized to supply reactive power to the MG under consideration. This is achieved by increasing the coordination power of each MG by a value equal to the ESS resources available at MMG level (i.e., ) and decreasing the coordination power of the MG under consideration by the ESS resources available at the MMG level (i.e., ). After that, the MGCs of the nearby MGs are asked to dispatch the required NRES capacity. If the nearby MG has enough NRESs to meet the requirement, its coordination power is increased by a value equal to the load required (i.e., ) and the coordination power of the MG under consideration is decreased by the same value (i.e., ). Otherwise, all NRESs available at MMG level are dispatched by increasing the coordination powers of the nearby MG by a value equal to the available NRESs resources (i.e., ) and decreasing the coordination power of the MG under consideration by the same value (i.e., ). If both the ESSs and NRESs are insufficient to meet the demand, all the ESSs and NRESs from all the MGs are dispatched by increasing the coordination powers of the nearby MG by a value equal to the available ESS and NRES resources (i.e., ) and decreasing the coordination power of the MG under consideration by the same value (i.e., ) and the MG under consideration has to shed the remaining load.
- If both the RESs and EVs are unable to meet the requirements, the MMGC dispatches all the available resources of the RESs and EVs from the respective MGCs and checks the ESUs available at MMG level. If these are sufficient to meet the requirements (i.e., ), the MMGC asks the MGC of the nearby MGs to dispatch the required load demands from their ESUs. This is achieved by increasing the coordination powers of the nearby MG by a value equal to the load required (i.e., and ) and decreasing the coordination powers of the MG under consideration by the same value (i.e., and ). If this is not the case, the coordination powers of the nearby MGs are increased by a ratio equal to the power factor of the required load (see Equations (9) and (10)) and the coordination powers of the MG under consideration are decreased by the same value (see Equations (11) and (12)).In this way, all the the contributing MGs supply power with a uniform ratio equal to the power factor of the required load.
- If the load demand at MMG level is higher than the potential of the RESs, EVs, and ESUs, the MMGC deploys the NRESs available for inter-MG operation for the rest of the load supplies. If the NRESs are able to meet the load demands (i.e., ), the MGCs of the nearby MGs are dispatched in order of their geographical proximity. This is achieved by increasing the coordination powers of the nearby MG by a value equal to the load required (i.e., and ) and decreasing the coordination powers of the MG under consideration by the same value (i.e., and ). If this is not the case, the coordination powers of the nearby MGs are increased by a ratio equal to the power factor of the required load (see Equation (13) and Equation (14)) and the coordination powers of the MG under consideration are decreased by the same value (see Equation (15) and Equation (16)).If this is insufficient, the NRESs are dispatched to their full capacity and the MGC of the concerned MG is compelled to shed the remaining loads.
2.2. Microgrid Controller (MGC)
- If there is only active power demand, the RESs are operated in maximum power point tracking (MMPT) mode and the ESUs are charged at their rated capacities, if required. This is perormed to make possible the maximum possible utilization of the RESs and to provide the maximum potential to a particular MG, to meet the load demands by charging ESUs to the maximum possible extent;
- If reactive power is required, it is provided by the RESs, ESUs, and NRESs in order. The rest of the reactive power, if required, is provided by the grid. After the reactive power is scheduled, the RESC extracts the leftover power from the RESs. This is calculated by Equation (17).The ESUs are charged if there is remaining capacity. If is greater than , this means that some portion of is used to satisfy the load. Thus, the remaining capacity available for charging is given by Equation (18).However, if is sufficient to satisfy , the remaining capacity available for charging is given by Equation (19).
- If the reactive power is available at MG level, it is used to charge the ESUs of the MG. The rest of the reactive power, if available, is supplied to the grid. The RESs are operated at MPPT. If is greater than , the ESUs are charged to a capacity using Equation (20).However, if is smaller than , the ESUs are charged to a capacity using Equation (21).
| Algorithm 2 Proposed Algorithm for MGC | |
|
|
- If there is only active power demand and the EVs are unable to load or support the MG, the RESs are considered for supplying the load at first. If the RESs are sufficient for load supply, extra power from the RESs is used to charge the ESUs. The rest of the RES power, if available, is curtailed. Otherwise, the ESUs and NRESs are used to supply the load, in order, if needed. The rest of the load, if any, is shed.
- In the presence of only an active power load and EV charging demand, the RESs are used to supply the load first. If the RESs are sufficient for load supply, the remaining RES capacity is used to supply the EVs. The remaining RES capacity, if any, is used to charge the ESUs if possible. If the RESs, after supplying the load, are not able to supply the EVs, the ESUs and NRESs are used to supply the EVs, in order, if required. If the RESs are not able to supply the load, the ESUs are used to supply the remaining load. If the ESUs are able to supply the remaining load, the EVs are supplied from the ESUs. If the ESUs are insufficient for the supply, the NRESs are deployed accordingly. In this case, even the NRESs fall short of the EV demand and EVs are shed accordingly.If the both RESs and ESUs are insufficient to fulfill the load demand, the RESs and ESUs are fully utilized and the remaining load demand is fulfilled from the NRESs. If the NRESs are sufficient to fulfill the load demand, the rest of the NRES capacity is used to supply the EVs. If this capacity is insufficient, the remaining EV load is shed. If the NRESs are not even sufficient to fulfill the load demand, the NRESs are operated at their rated capacity. The remaining load and the whole of the EV demand is shed.
- If the load is purely active and the EVs are able to supply the load, the RESs are used to supply the load at first. The ESUs are charged from the remaining RES potential and, if required, from the power available from the EVs. If the RESs are not sufficient to supply the load, the RESs are fully utilized and the remaining load is supplied from the EVs. The remaining EV capacity, if any, is used to charge the ESUs, if required. Any more EV capacity, if available, is curtailed. If both RESs and EVs are insufficient, the ESUs and NRESs are used to supply the remaining load.
- In the case of a reactive power requirement, this is supplied from the RESs, ESUs, and NRESs, and the remaining reactive power, if any, is shed. After that , , , and are calculated for active power dispatch. can be calculated using Equation (22).If , this means that some portion of is discharged to meet the reactive power requirements, so, and can be calculated using Equations (23) and (24).If , this means that some portion of can be used to meet the active power requirements. Thus, and can be calculated using Equations (25) and (26).for active power dispatch can be calculated using Equation (27).After calculating the remaining capacities of the RESs, ESUs, and NRESs, the active power is scheduled as describe above.
- If reactive power is available, it is absorbed by the ESUs, and left over reactive power, if any, is shed. Since RESs are not used in this process, remains intact to meet the active power demands (see Equation (28)).If , this means that some portion of is used for reactive power support. Thus, the available resources from ESUs towards active power support can be calculated using Equations (29) and (30).If ,this means that some portion of can be used for active power support. Thus, the available resources from ESUs towards active power support can be calculated using Equations (31) and (32).Since NRESs are not used in this process, remains intact to meet the active power demands (see Equation (33)).After that, the active power is scheduled as describe above.
2.3. EV Controllers (EVCs)
| Algorithm 3 Proposed EVC Algorithm | |
|
|
3. Results and Discussion
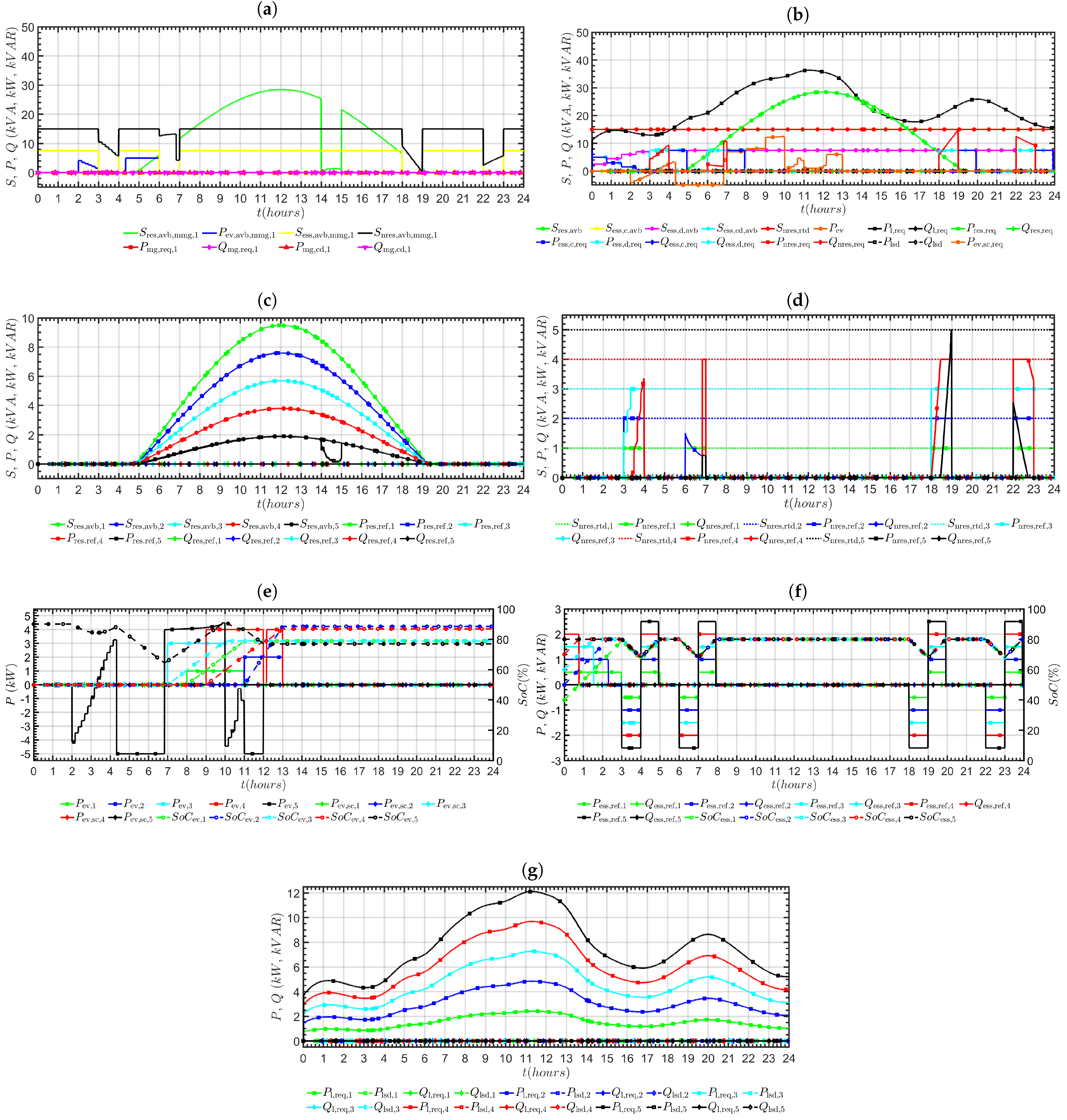
3.1. Response of MG 1
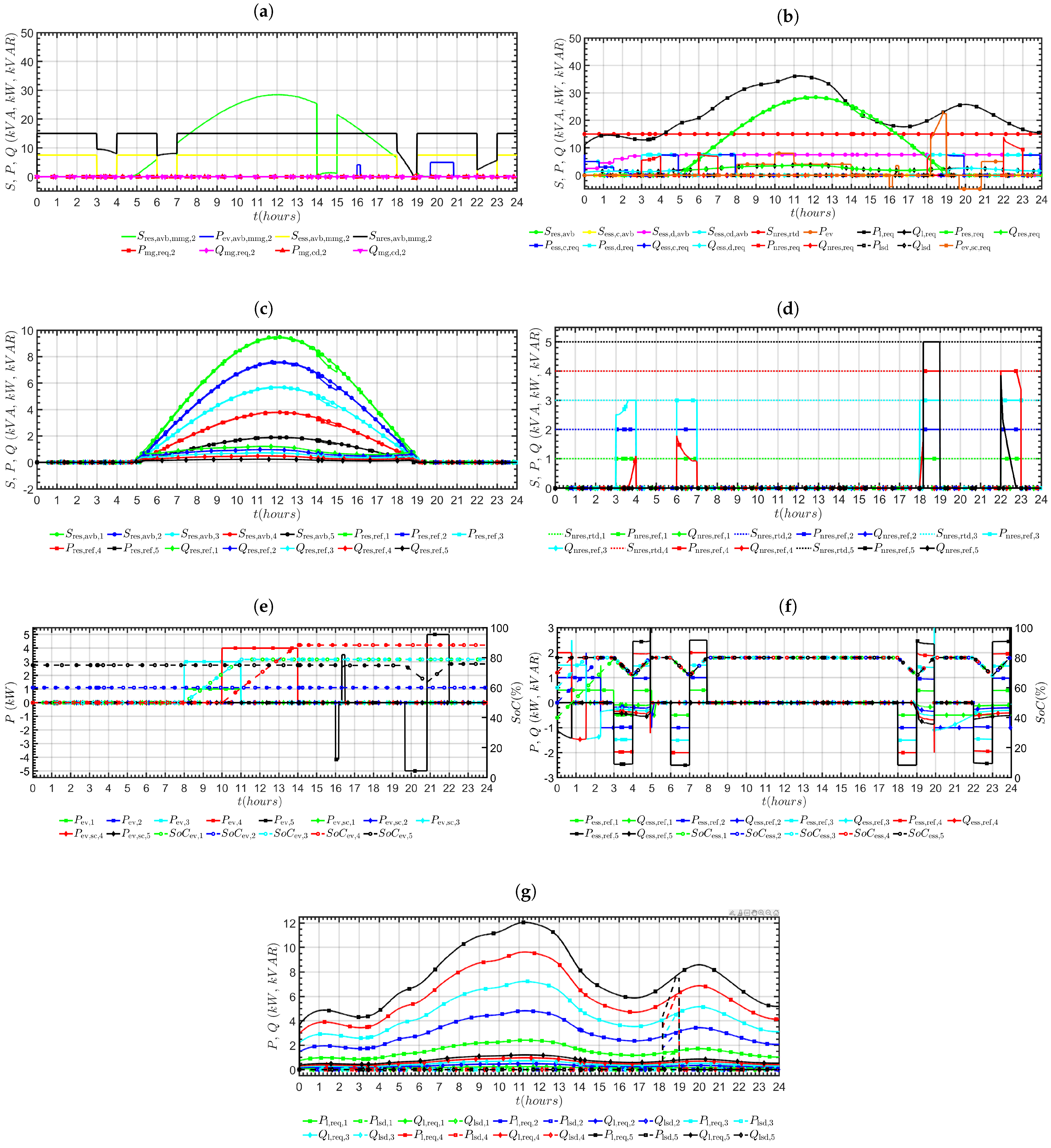
3.2. Response of MG 2
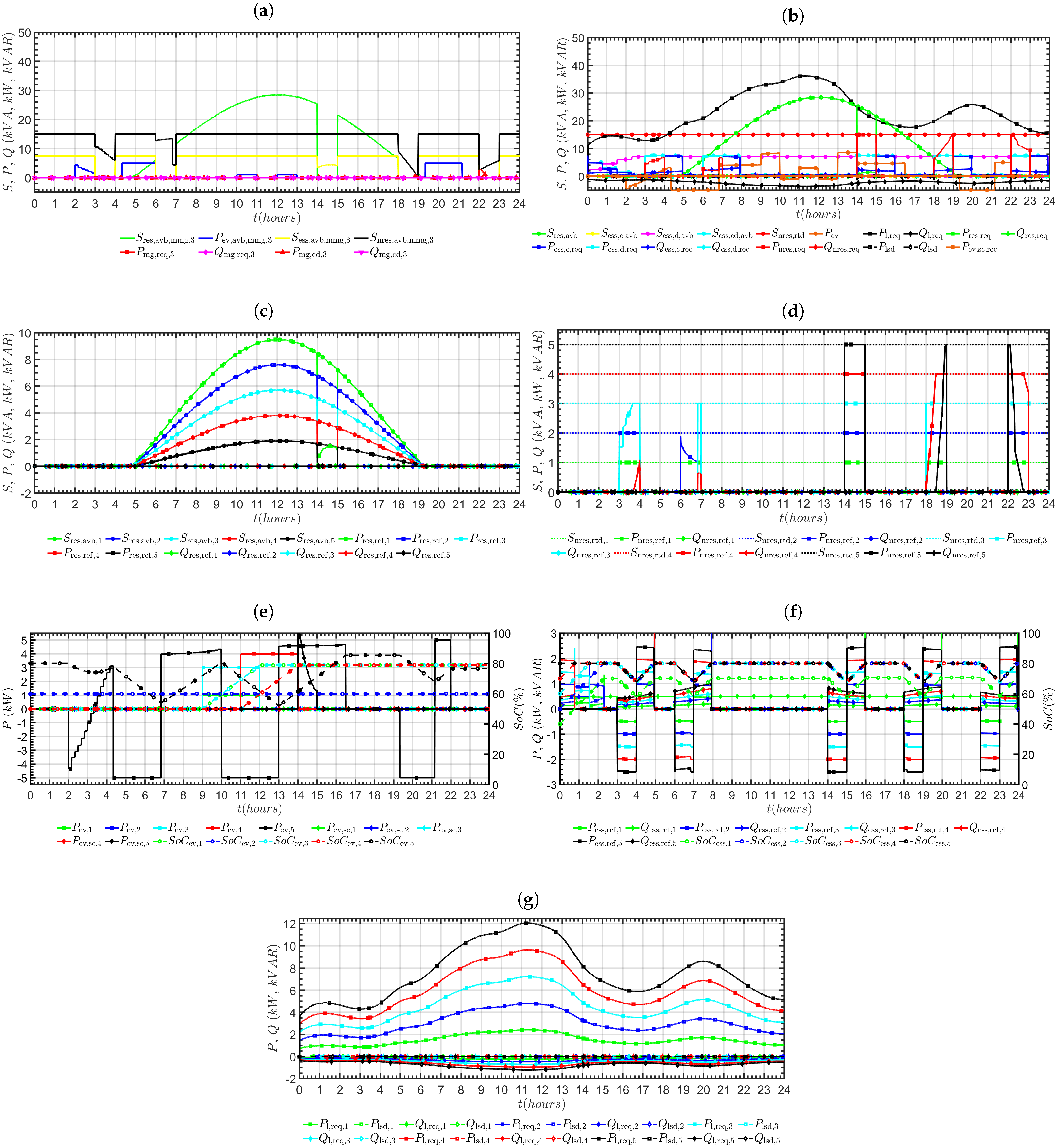
3.3. Response of MG 3
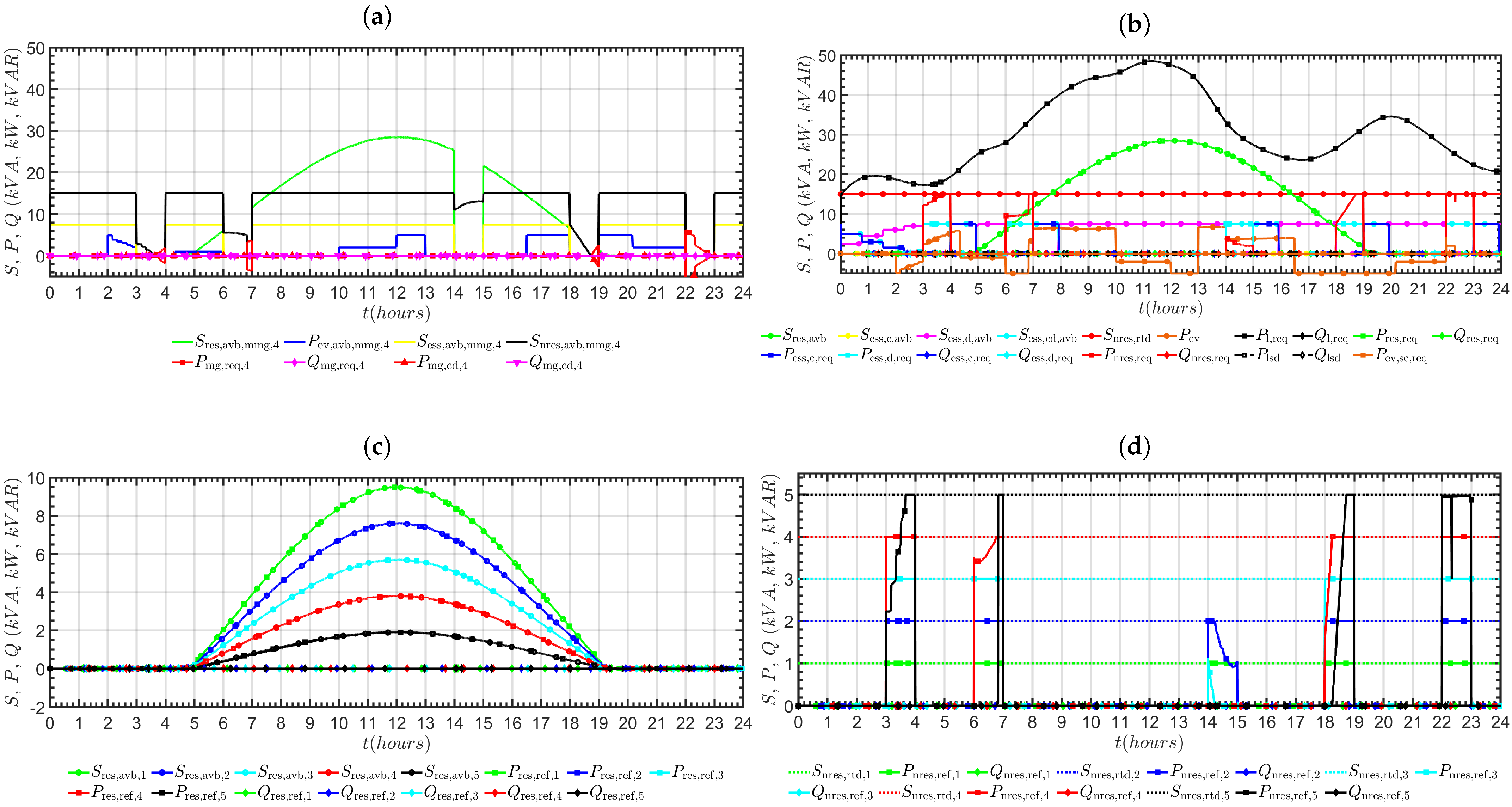
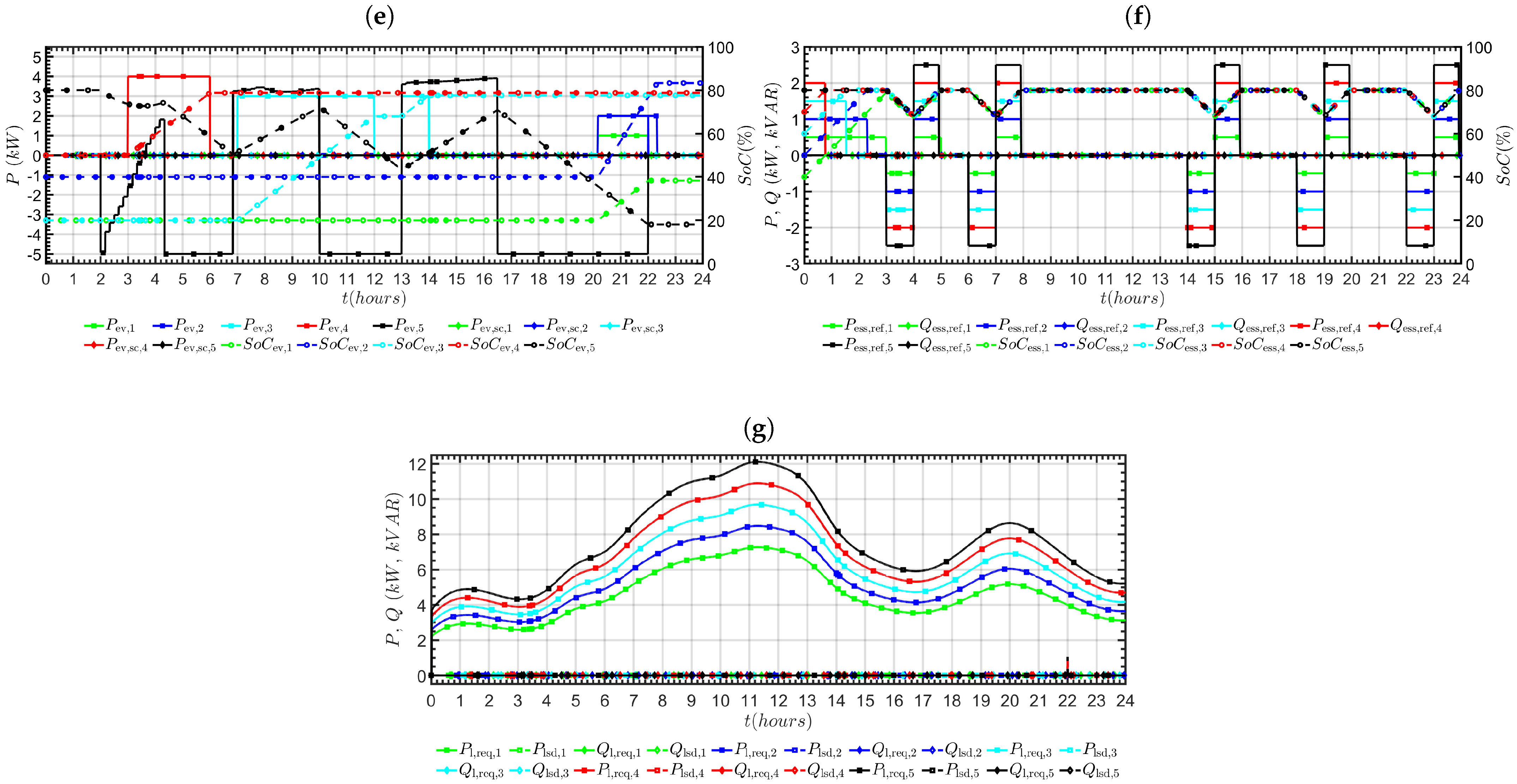
3.4. Response of MG 4
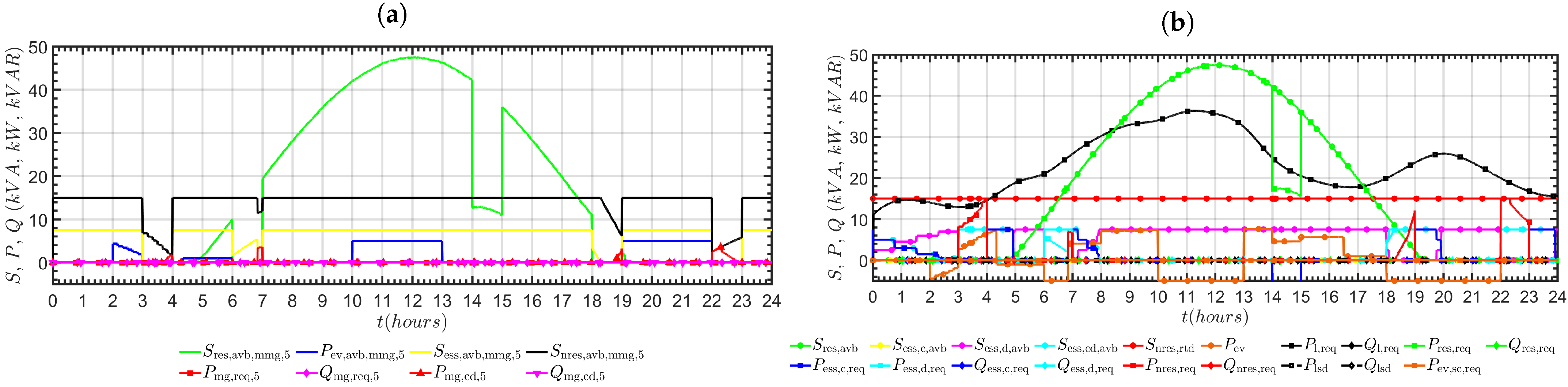
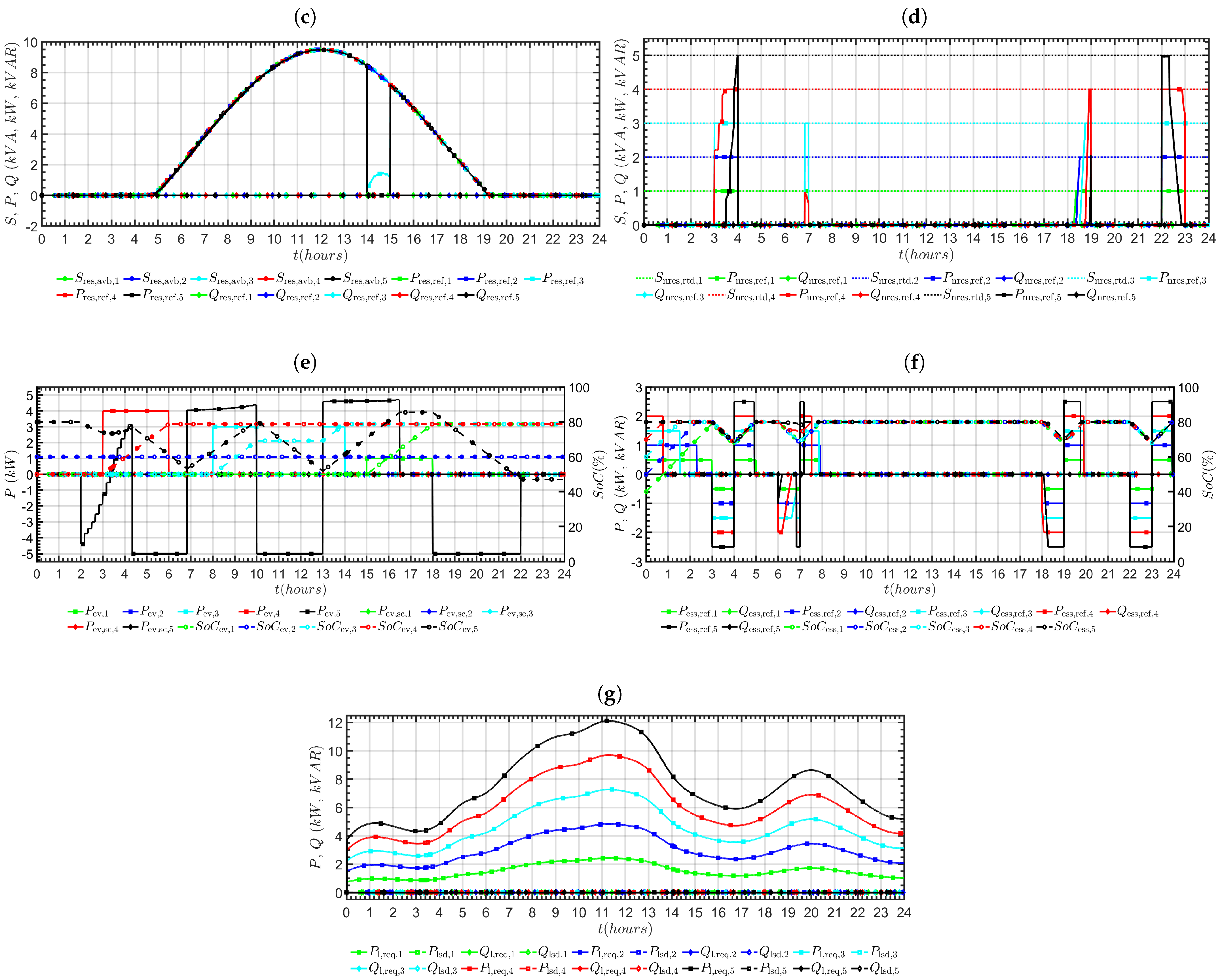
3.5. Response of MG 5
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| BESS | Battery Based Energy Storage System |
| DES | Distributed Energy Source |
| ESS | Energy Storage System |
| ESSC | Energy Storage System Unit Controller |
| ESU | Energy Storage Unit |
| EV | Electric Vehicle |
| EVC | Electric Vehicle Unit Controller |
| LC | Load Unit Controller |
| MC | Microsource Controller |
| MG | Microgrid |
| MGC | Microgrid Controller |
| MMG | Multimicrogrid |
| MMGC | Multimicrogrid Controller |
| MPPT | Maximum Power Point Tracking |
| NRES | Non Renewable Energy Source |
| NRESC | Non Renewable Energy Source Unit Controller |
| PCC | Point of Common Coupling |
| RES | Renewable Energy Source |
| RESC | Renewable Energy Source Unit Controller |
| SoC | State of Charge |
| UC | Unit Controller |
References
- K.S., N.; Gaonkar, D.N.; N.S., J. Operation and control of multiple electric vehicle load profiles in bipolar microgrid with photovoltaic and battery energy systems. J. Energy Storage 2023, 57, 106261. [Google Scholar] [CrossRef]
- Rastgoo, S.; Mahdavi, Z.; Azimi Nasab, M.; Zand, M.; Padmanaban, S. Using an Intelligent Control Method for Electric Vehicle Charging in Microgrids. World Electr. Veh. J. 2022, 13, 222. [Google Scholar] [CrossRef]
- Gulzar, M.M.; Sibtain, D.; Khalid, M. Cascaded Fractional Model Predictive Controller for Load Frequency Control in Multiarea Hybrid Renewable Energy System with Uncertainties. Int. J. Energy Res. 2023, 2023, 5999997. [Google Scholar] [CrossRef]
- Zou, M.; Yang, Y.; Liu, M.; Wang, W.; Jia, H.; Peng, X.; Su, S.; Liu, D. Optimization Model of Electric Vehicles Charging and Discharging Strategy Considering the Safe Operation of Distribution Network. World Electr. Veh. J. 2022, 13, 117. [Google Scholar] [CrossRef]
- Mal, S.; Chattopadhyay, A.; Yang, A.; Gadh, R. Electric vehicle smart charging and vehicle-to-grid operation. Int. J. Parallel Emergent Distrib. Syst. 2013, 28, 249–265. [Google Scholar] [CrossRef]
- Ferreira, J.C.; Monteiro, V.; Afonso, J.L.; Silva, A. Smart electric vehicle charging system. In Proceedings of the 2011 IEEE Intelligent Vehicles Symposium (IV), Baden-Baden, Germany, 5–9 June 2011; pp. 758–763. [Google Scholar] [CrossRef]
- Zhang, Z.; Gu, D. Impacts of charging plug-in hybrid electric vehicles on the electric grid and its charging strategies. In Proceedings of the 2012 Power Engineering and Automation Conference, Wuhan, China, 18–20 September 2012; pp. 1–4. [Google Scholar] [CrossRef]
- Xydas, E.; Marmaras, C.; Cipcigan, L.M. A multi-agent based scheduling algorithm for adaptive electric vehicles charging. Appl. Energy 2016, 177, 354–365. [Google Scholar] [CrossRef]
- Wang, D.; Guan, X.; Wu, J.; Li, P.; Zan, P.; Xu, H. Integrated Energy Exchange Scheduling for Multimicrogrid System With Electric Vehicles. IEEE Trans. Smart Grid 2016, 7, 1762–1774. [Google Scholar] [CrossRef]
- Ahmadi, S.E.; Marzband, M.; Ikpehai, A.; Abusorrah, A. Optimal stochastic scheduling of plug-in electric vehicles as mobile energy storage systems for resilience enhancement of multi-agent multi-energy networked microgrids. J. Energy Storage 2022, 55, 105566. [Google Scholar] [CrossRef]
- Pamulapati, T.; Cavus, M.; Odigwe, I.; Allahham, A.; Walker, S.; Giaouris, D. A Review of Microgrid Energy Management Strategies from the Energy Trilemma Perspective. Energies 2023, 16, 289. [Google Scholar] [CrossRef]
- Battula, A.R.; Vuddanti, S.; Salkuti, S.R. Review of Energy Management System Approaches in Microgrids. Energies 2021, 14, 5459. [Google Scholar] [CrossRef]
- Al-Ghaili, A.M.; Kasim, H.; Aris, H.; Al-Hada, N.M. Can electric vehicles be an alternative for traditional fossil-fuel cars with the help of renewable energy sources towards energy sustainability achievement? Energy Inform. 2022, 5, 60. [Google Scholar] [CrossRef]
- Sibtain, D.; Mushtaq, M.A.; Murtaza, A.F. Adaptive design and implementation of fractional order PI controller for a multi-source (Battery/UC/FC) hybrid electric vehicle. Energy Sources Part A Recover. Util. Environ. Eff. 2022, 44, 8996–9016. [Google Scholar] [CrossRef]
- Tamrakar, U.; Shrestha, D.; Maharjan, M.; Bhattarai, B.P.; Hansen, T.M.; Tonkoski, R. Virtual Inertia: Current Trends and Future Directions. Appl. Sci. 2017, 7, 654. [Google Scholar] [CrossRef]
- Yazdanian, M.; Mehrizi-Sani, A. Distributed Control Techniques in Microgrids. IEEE Trans. Smart Grid 2014, 5, 2901–2909. [Google Scholar] [CrossRef]
- Kroposki, B.; Johnson, B.; Zhang, Y.; Gevorgian, V.; Denholm, P.; Hodge, B.; Hannegan, B. Achieving a 100% Renewable Grid: Operating Electric Power Systems with Extremely High Levels of Variable Renewable Energy. IEEE Power Energy Mag. 2017, 15, 61–73. [Google Scholar] [CrossRef]
- Kroposki, B. Integrating high levels of variable renewable energy into electric power systems. J. Mod. Power Syst. Clean Energy 2017, 5, 831–837. [Google Scholar] [CrossRef]
- Worighi, I.; Maach, A.; Hafid, A.; Hegazy, O.; Mierlo, J.V. Integrating renewable energy in smart grid system: Architecture, virtualization and analysis. Sustain. Energy Grids Netw. 2019, 18, 100226. [Google Scholar] [CrossRef]
- Mararakanye, N.; Bekker, B. Renewable energy integration impacts within the context of generator type, penetration level and grid characteristics. Renew. Sustain. Energy Rev. 2019, 108, 441–451. [Google Scholar] [CrossRef]
- Phuangpornpitak, N.; Tia, S. Opportunities and Challenges of Integrating Renewable Energy in Smart Grid System. Energy Procedia 2013, 34, 282–290. [Google Scholar] [CrossRef]
- Rakhshani, E.; Rouzbehi, K.; J. Sánchez, A.; Tobar, A.C.; Pouresmaeil, E. Integration of Large Scale PV-Based Generation into Power Systems: A Survey. Energies 2019, 12, 1425. [Google Scholar] [CrossRef]
- Kumar, G.V.B.; Sarojini, R.K.; Palanisamy, K.; Padmanaban, S.; Holm-Nielsen, J.B. Large Scale Renewable Energy Integration: Issues and Solutions. Energies 2019, 12, 1996. [Google Scholar] [CrossRef]
- Hache, E.; Palle, A. Renewable energy source integration into power networks, research trends and policy implications: A bibliometric and research actors survey analysis. Energy Policy 2019, 124, 23–35. [Google Scholar] [CrossRef]
- Xu, Z.; Yang, P.; Zheng, C.; Zhang, Y.; Peng, J.; Zeng, Z. Analysis on the organization and Development of multi-microgrids. Renew. Sustain. Energy Rev. 2018, 81, 2204–2216. [Google Scholar] [CrossRef]
- Wu, P.; Huang, W.; Tai, N.; Liang, S. A novel design of architecture and control for multiple microgrids with hybrid AC/DC connection. Appl. Energy 2018, 210, 1002–1016. [Google Scholar] [CrossRef]
- Yoo, H.J.; Nguyen, T.T.; Kim, H.M. Multi-Frequency Control in a Stand-Alone Multi-Microgrid System Using a Back-To-Back Converter. Energies 2017, 10, 822. [Google Scholar] [CrossRef]
- Majumder, R.; Bag, G. Parallel operation of converter interfaced multiple microgrids. Int. J. Electr. Power Energy Syst. 2014, 55, 486–496. [Google Scholar] [CrossRef]
- Shafiee, Q.; Dragičević, T.; Vasquez, J.C.; Guerrero, J.M. Hierarchical Control for Multiple DC-Microgrids Clusters. IEEE Trans. Energy Convers. 2014, 29, 922–933. [Google Scholar] [CrossRef]
- Gulzar, M.M.; Iqbal, M.; Shahzad, S.; Muqeet, H.A.; Shahzad, M.; Hussain, M.M. Load Frequency Control (LFC) Strategies in Renewable Energy-Based Hybrid Power Systems: A Review. Energies 2022, 15, 3488. [Google Scholar] [CrossRef]
- Chen, J.; Chen, C.; Duan, S. Cooperative Optimization of Electric Vehicles and Renewable Energy Resources in a Regional Multi-Microgrid System. Appl. Sci. 2019, 9, 2267. [Google Scholar] [CrossRef]
- N.S., J.; Jadoun, V.K.; Gaonkar, D.; Shrivastava, A.; Kanwar, N.; K.K., N. Optimal operation of multi-source electric vehicle connected microgrid using metaheuristic algorithm. J. Energy Storage 2022, 52, 105067. [Google Scholar] [CrossRef]
- Lan, T.; Jermsittiparsert, K.; T. Alrashood, S.; Rezaei, M.; Al-Ghussain, L.; A. Mohamed, M. An Advanced Machine Learning Based Energy Management of Renewable Microgrids Considering Hybrid Electric Vehicles’ Charging Demand. Energies 2021, 14, 569. [Google Scholar] [CrossRef]
- Hai, T.; Zhou, J.; K. Alazzawi, A.; Muranaka, T. Management of renewable-based multi-energy microgrids with energy storage and integrated electric vehicles considering uncertainties. J. Energy Storage 2023, 60, 106582. [Google Scholar] [CrossRef]
- Khokhar, B.; Dahiya, S.; Parmar, K.P.S. Load Frequency Control of a Multi-Microgrid System Incorporating Electric Vehicles. Electr. Power Compon. Syst. 2021, 49, 867–883. [Google Scholar] [CrossRef]
- Zou, Y.; Dong, Y.; Li, S.; Niu, Y. Multi-time hierarchical stochastic predictive control for energy management of an island microgrid with plug-in electric vehicles. IET Gener. Transm. Distrib. 2019, 13, 1794–1801. [Google Scholar] [CrossRef]
- Tan, B.; Chen, H.; Zheng, X.; Huang, J. Two-stage robust optimization dispatch for multiple microgrids with electric vehicle loads based on a novel data-driven uncertainty set. Int. J. Electr. Power Energy Syst. 2022, 134, 107359. [Google Scholar] [CrossRef]
- Tan, B.; Chen, H. Multi-objective energy management of multiple microgrids under random electric vehicle charging. Energy 2020, 208, 118360. [Google Scholar] [CrossRef]
- Rehman, H.U.; Yan, X.; Abdelbaky, M.A.; Jan, M.U.; Iqbal, S. An advanced virtual synchronous generator control technique for frequency regulation of grid-connected PV system. Int. J. Electr. Power Energy Syst. 2021, 125, 106440. [Google Scholar] [CrossRef]
- Mabrouk, E.; Maach, A. Assessing the Impact of Electric Vehicle Fleets on a Multi-Microgrids System Under Different Operating Modes. Turk. J. Comput. Math. Educ. 2021, 12, 1000–1014. [Google Scholar] [CrossRef]
- Yu, Z.; Dou, Z.; Zhao, Y.; Xie, R.; Qiao, M.; Wang, Y.; Liu, L. Grid Scheduling Strategy Considering Electric Vehicles Participating in Multi-microgrid Interaction. J. Electr. Eng. Technol. 2022. [Google Scholar] [CrossRef]
- Ali, A.Y.; Hussain, A.; Baek, J.W.; Man-Kim, H. An algorithm to enhance the profit margin of electric vehicle owners and resilience of multi-microgrid using EV. J. Electr. Eng. Technol. 2022, 17, 2161–2169. [Google Scholar] [CrossRef]
- Mauricette, L.; Dong, Z.; Zhang, L.; Zhang, X.; Zhang, N.; Strbac, G. Resilience enhancement of an urban energy system via coordinated vehicle-to-grid control strategies. CSEE J. Power Energy Syst. 2022, 9, 433–443. [Google Scholar] [CrossRef]
- Wang, J.; Li, K.J.; Javid, Z.; Sun, Y. Distributed Optimal Coordinated Operation for Distribution System with the Integration of Residential Microgrids. Appl. Sci. 2019, 9, 2136. [Google Scholar] [CrossRef]
- Wang, P.; Wang, D.; Zhu, C.; Yang, Y.; Abdullah, H.M.; Mohamed, M.A. Stochastic management of hybrid AC/DC microgrids considering electric vehicles charging demands. Energy Rep. 2020, 6, 1338–1352. [Google Scholar] [CrossRef]
- Kaewdornhan, N.; Srithapon, C.; Chatthaworn, R. Electric Distribution Network With Multi-Microgrids Management Using Surrogate-Assisted Deep Reinforcement Learning Optimization. IEEE Access 2022, 10, 130373–130396. [Google Scholar] [CrossRef]
- Cavallo, A.; Canciello, G.; Guida, B.; Kulsangcharoen, P.; Yeoh, S.S.; Rashed, M.; Bozhko, S. Multi-Objective Supervisory Control for DC/DC Converters in Advanced Aeronautic Applications. Energies 2018, 11, 3216. [Google Scholar] [CrossRef]
- Canciello, G.; Cavallo, A.; Lo Schiavo, A.; Russo, A. Multi-objective adaptive sliding manifold control for More Electric Aircraft. ISA Trans. 2020, 107, 316–328. [Google Scholar] [CrossRef] [PubMed]
- Ahmad, A.; Kashif, S.A.R.; Ashraf, A.; Gulzar, M.M.; Alqahtani, M.; Khalid, M. Coordinated Economic Operation of Hydrothermal Units with HVDC Link Based on Lagrange Multipliers. Mathematics 2023, 11, 1610. [Google Scholar] [CrossRef]
- Gulzar, M.M.; Gardezi, S.; Sibtain, D.; Khalid, M. Discrete-Time Modeling and Control for LFC Based on Fuzzy Tuned Fractional-Order PDμ Controller in a Sustainable Hybrid Power System. IEEE Access 2023, 11, 63271–63287. [Google Scholar] [CrossRef]
- Liu, X.; Gao, B.; Zhu, Z.; Tang, Y. Non-cooperative and cooperative optimisation of battery energy storage system for energy management in multi-microgrid. IET Gener. Transm. Distrib. 2018, 12, 2369–2377. [Google Scholar] [CrossRef]
- Siddique, A.B.; Gabbar, H.A. Adaptive Mixed-Integer Linear Programming-Based Energy Management System of Fast Charging Station with Nuclear–Renewable Hybrid Energy System. Energies 2023, 16, 685. [Google Scholar] [CrossRef]
- Padhilah, F.A.; Kim, K.H. A Centralized Power Flow Control Scheme of EV-Connected DC Microgrid to Satisfy Multi-Objective Problems under Several Constraints. Sustainability 2021, 13, 8863. [Google Scholar] [CrossRef]
- Chen, L.; Yu, W.; Cheng, G.; Wang, J. State-of-charge estimation of lithium-ion batteries based on fractional-order modeling and adaptive square-root cubature Kalman filter. Energy 2023, 271, 127007. [Google Scholar] [CrossRef]
- Gulzar, M.M.; Iqbal, A.; Sibtain, D.; Khalid, M. An innovative converterless solar PV control strategy for a grid connected hybrid PV/wind/fuel-cell system coupled with battery energy storage. IEEE Access 2023, 11, 23245–23259. [Google Scholar] [CrossRef]
- Zandrazavi, S.F.; Guzman, C.P.; Pozos, A.T.; Quiros-Tortos, J.; Franco, J.F. Stochastic multi-objective optimal energy management of grid-connected unbalanced microgrids with renewable energy generation and plug-in electric vehicles. Energy 2022, 241, 122884. [Google Scholar] [CrossRef]
- Masrur, H.; Shafie-Khah, M.; Hossain, M.J.; Senjyu, T. Multi-Energy Microgrids Incorporating EV Integration: Optimal Design and Resilient Operation. IEEE Trans. Smart Grid 2022, 13, 3508–3518. [Google Scholar] [CrossRef]
- Molzahn, D.K.; Dörfler, F.; Sandberg, H.; Low, S.H.; Chakrabarti, S.; Baldick, R.; Lavaei, J. A Survey of Distributed Optimization and Control Algorithms for Electric Power Systems. IEEE Trans. Smart Grid 2017, 8, 2941–2962. [Google Scholar] [CrossRef]
- Karaarslan, A.; Seker, M.E. Distributed Control of Microgrids. In Microgrid Architectures, Control and Protection Methods; Mahdavi Tabatabaei, N., Kabalci, E., Bizon, N., Eds.; Springer International Publishing: Cham, Switzerland, 2020; pp. 403–422. [Google Scholar]
- Aslam, M.A.; Kashif, S.A.R.; Abbas, G.; Ullah, N.; Prokop, L.; Blazek, V.; Misak, S. A Comprehensive Decomposition Based Hierarchical Heuristic Control of Multimicrogrids. IEEE Access 2022, 10, 131611–131626. [Google Scholar] [CrossRef]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aslam, M.A.; Kashif, S.A.R.; Gulzar, M.M.; Alqahtani, M.; Khalid, M. A Novel Multi Level Dynamic Decomposition Based Coordinated Control of Electric Vehicles in Multimicrogrids. Sustainability 2023, 15, 12648. https://doi.org/10.3390/su151612648
Aslam MA, Kashif SAR, Gulzar MM, Alqahtani M, Khalid M. A Novel Multi Level Dynamic Decomposition Based Coordinated Control of Electric Vehicles in Multimicrogrids. Sustainability. 2023; 15(16):12648. https://doi.org/10.3390/su151612648
Chicago/Turabian StyleAslam, Muhammad Anique, Syed Abdul Rahman Kashif, Muhammad Majid Gulzar, Mohammed Alqahtani, and Muhammad Khalid. 2023. "A Novel Multi Level Dynamic Decomposition Based Coordinated Control of Electric Vehicles in Multimicrogrids" Sustainability 15, no. 16: 12648. https://doi.org/10.3390/su151612648
APA StyleAslam, M. A., Kashif, S. A. R., Gulzar, M. M., Alqahtani, M., & Khalid, M. (2023). A Novel Multi Level Dynamic Decomposition Based Coordinated Control of Electric Vehicles in Multimicrogrids. Sustainability, 15(16), 12648. https://doi.org/10.3390/su151612648