
Enhancing the Stability of an Isolated Electric Grid by the Utilization of Energy Storage Systems: A Case Study on the Rafha Grid


Abstract
:1. Introduction
1.1. Research Objectives
- To utilize the WECC benchmarking BESS model on an existing microgrid using the PSS/E simulation platform.
- To study the impact of installing a BESS on the Rafha microgrid and examine the performance of angle, frequency, and voltage stabilities after contingency.
- Investigate the impact of changing the BESS’s size or location on the Rafha microgrid system’s stability.
- Find what will be the optimal bus location where the BESS should be installed in the Rafha microgrid in the presence of RES.
1.2. Problem Formulation
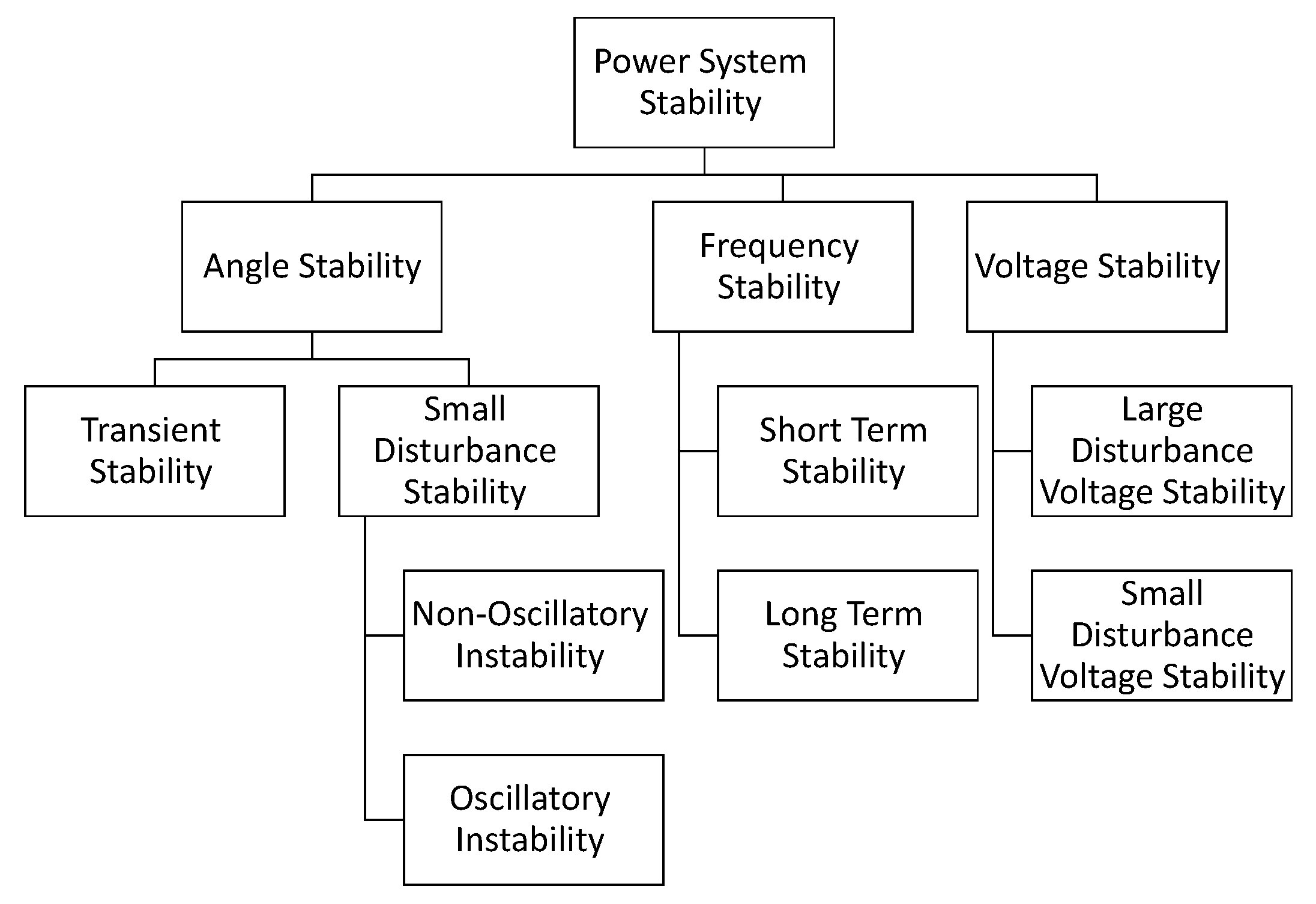
2. Power System Stability
2.1. Angle Stability
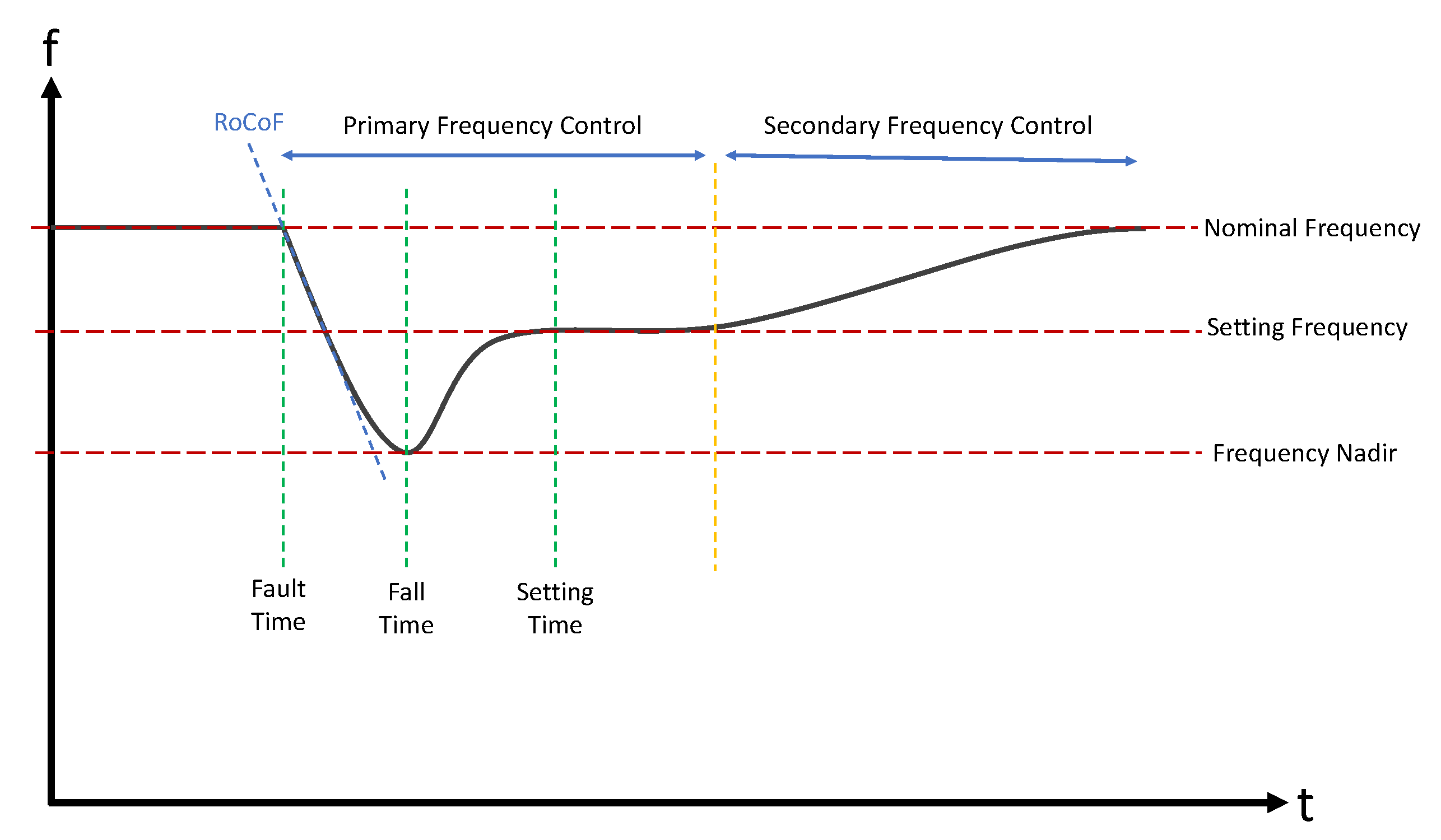
2.2. Frequency Stability
2.3. Voltage Stability
3. Energy Storage System
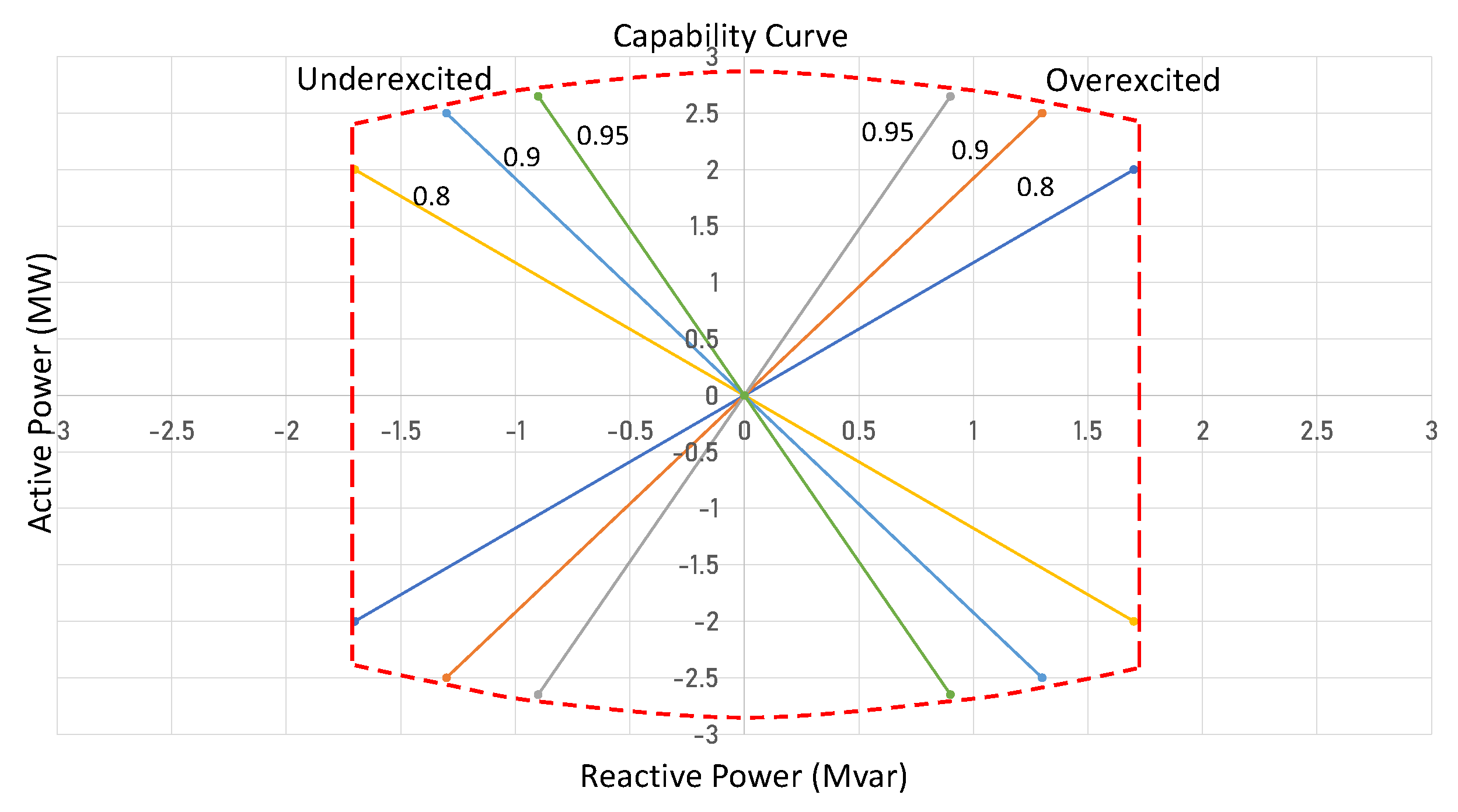
3.1. Capability Curve of BESS
3.2. Active Power Frequency Control
3.3. Reactive Power Voltage Control
4. Static BESS Modeling
4.1. Charging and Discharging Operation
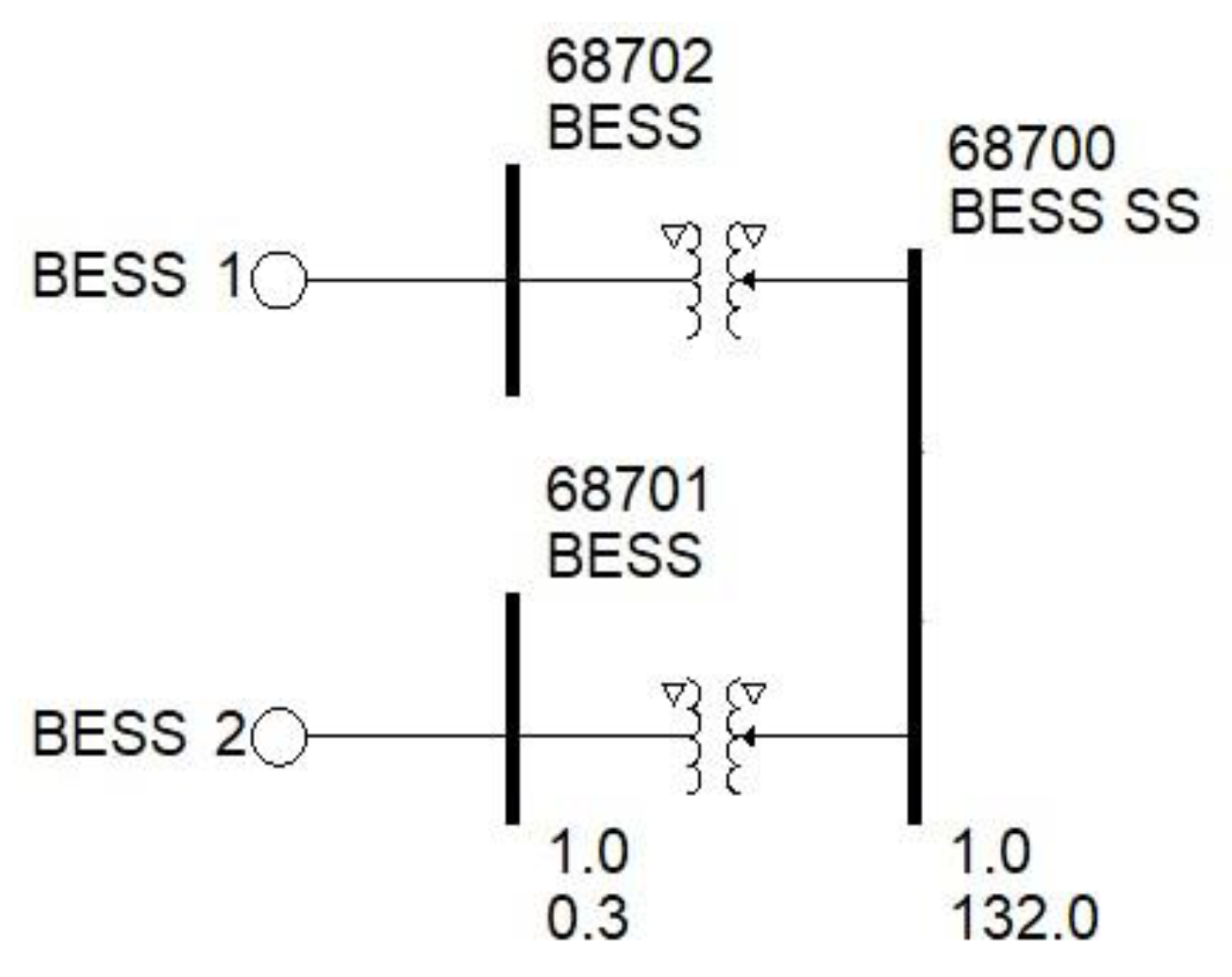
4.2. Point of Voltage Control and Frequency Control
5. Dynamic BESS Modeling
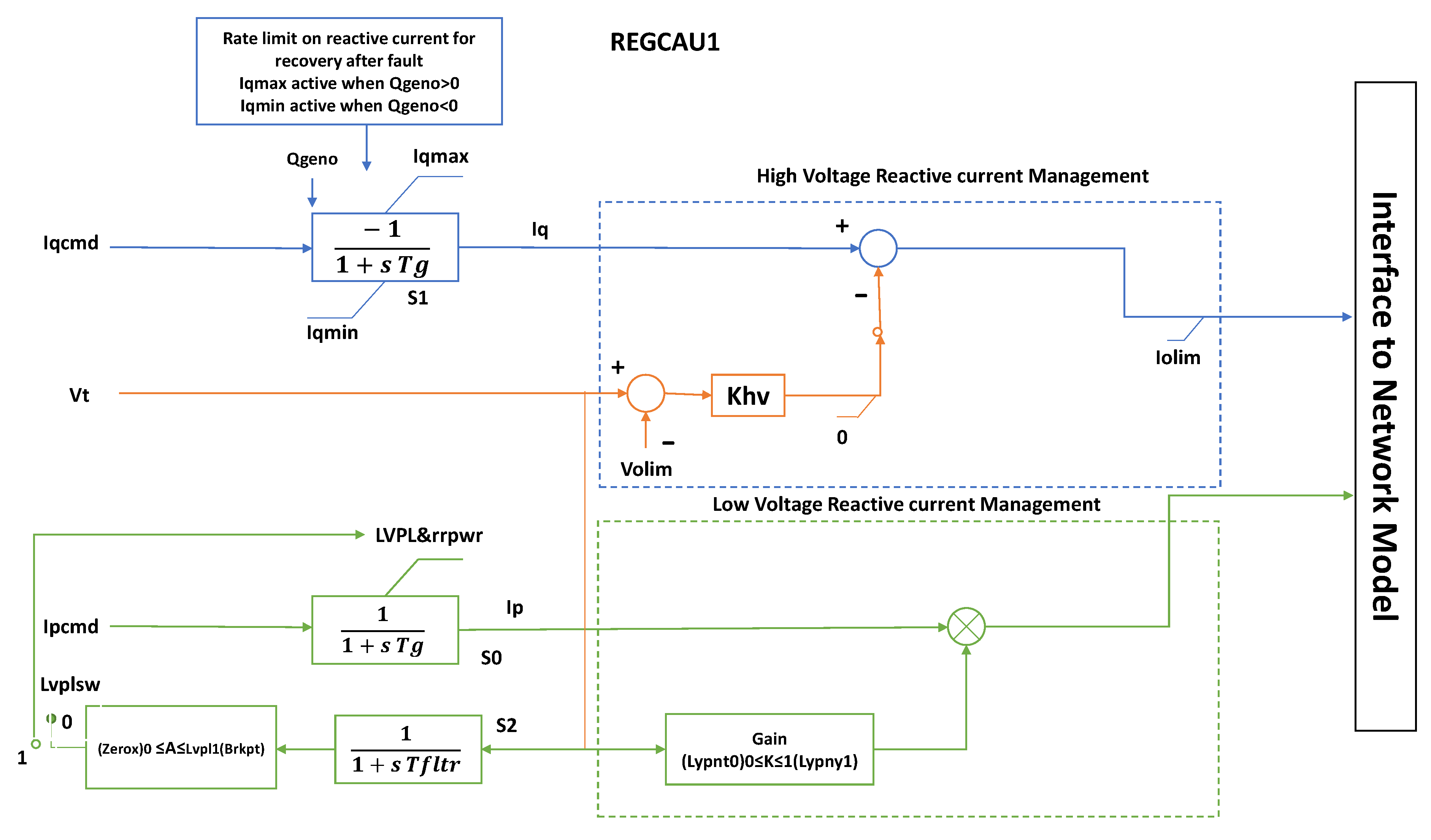
- REGCAU1 module:This represents the inverter interface to the power system. REGCAU1 receives the active and reactive current command, with terminal voltage as feedback, and outputs the active and reactive current that will be injected into the grid [32]. The REGCAU1 module shown in Figure 7 can be used to model different RES, such as wind or solar plants.
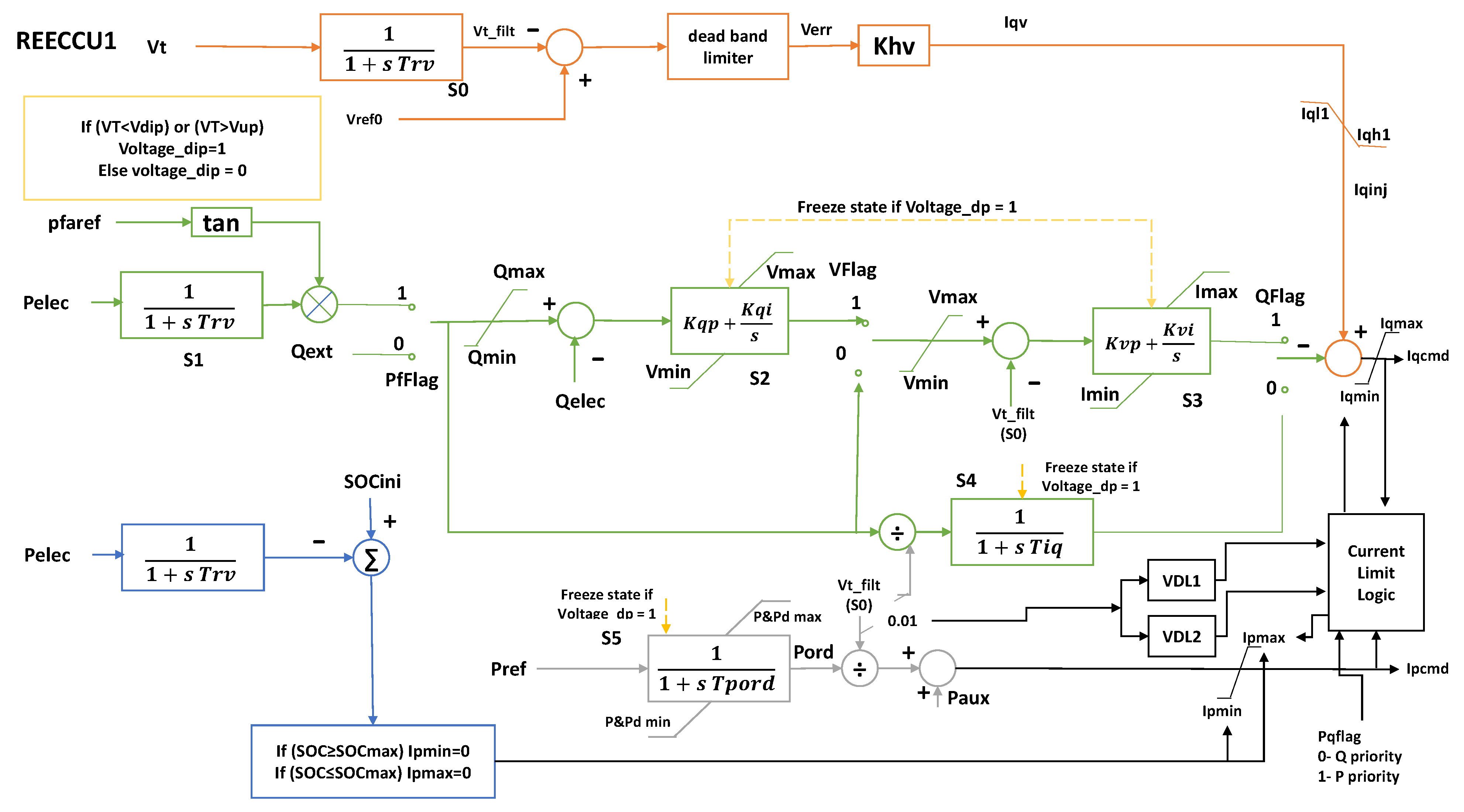
- REECCU1 module:REECCU1 is the electrical control module, and it is suitable for BESSs since it can operate the active and reactive power in the four quadrants if the SOC of the BESS allows it. The REECC shown in Figure 8 represents the control of the inverter. The input signals are the active power reference, reactive power reference, and feedback signal of the terminal voltage, which are taken from the REPCAU1 and REGCAU1 modules. The outputs are the active and reactive current commands, which go to the REGCAU1 module [32].
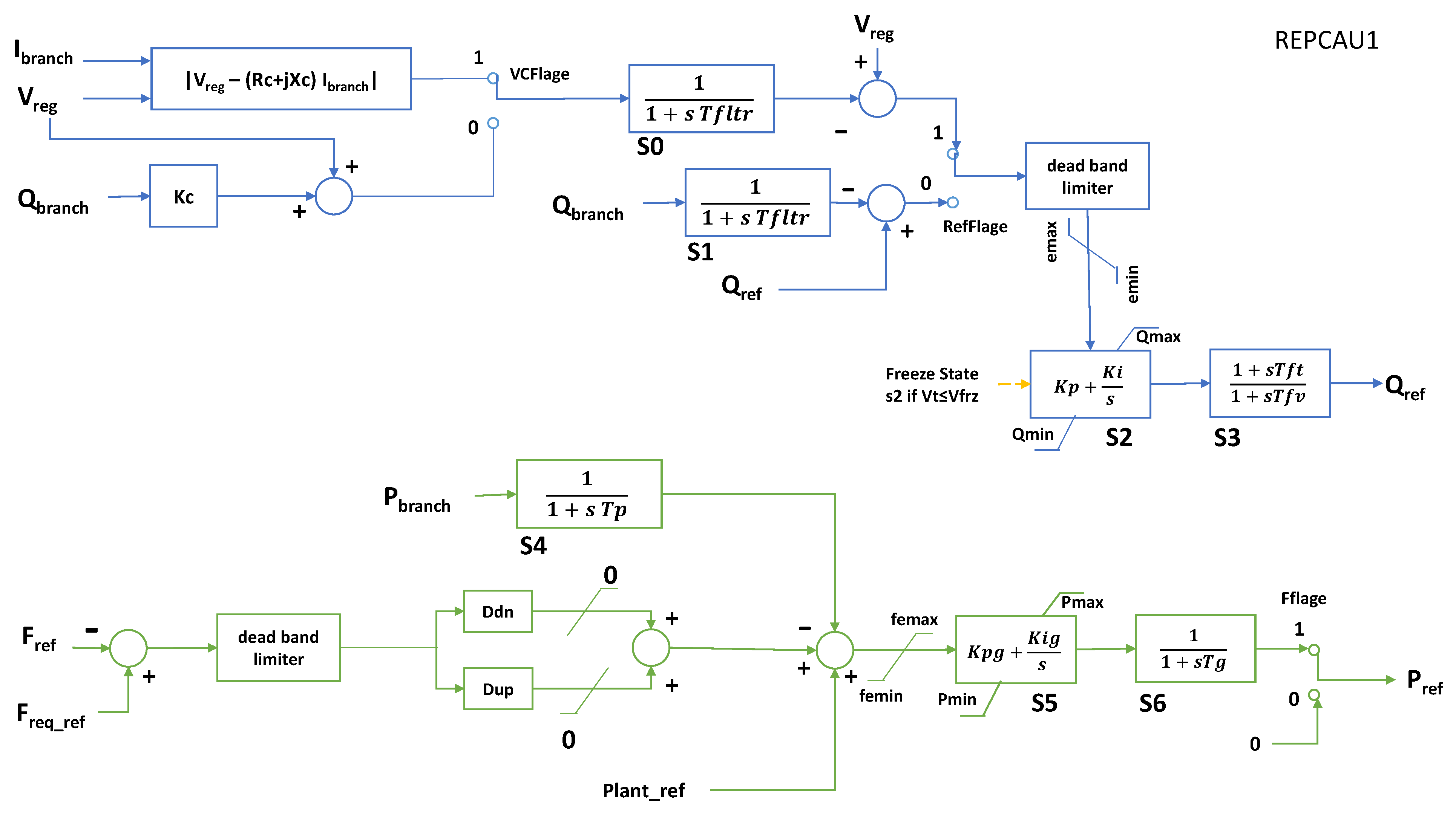
- REPCAU1 module:This represents the plant controller. Its inputs are the system voltage and the output reactive power to control the voltage at the plant level. Moreover, it inputs the system frequency, and the output is the active power entering to control the active power [32]. In addition, this module provides active and reactive power signals to the REECCU1 module, as shown in Figure 9. In addition, it can be used as a plant controller in other RES models.
6. Results and Discussion
6.1. Rafha System Base Case
6.2. Rafha System with Connecting BESS
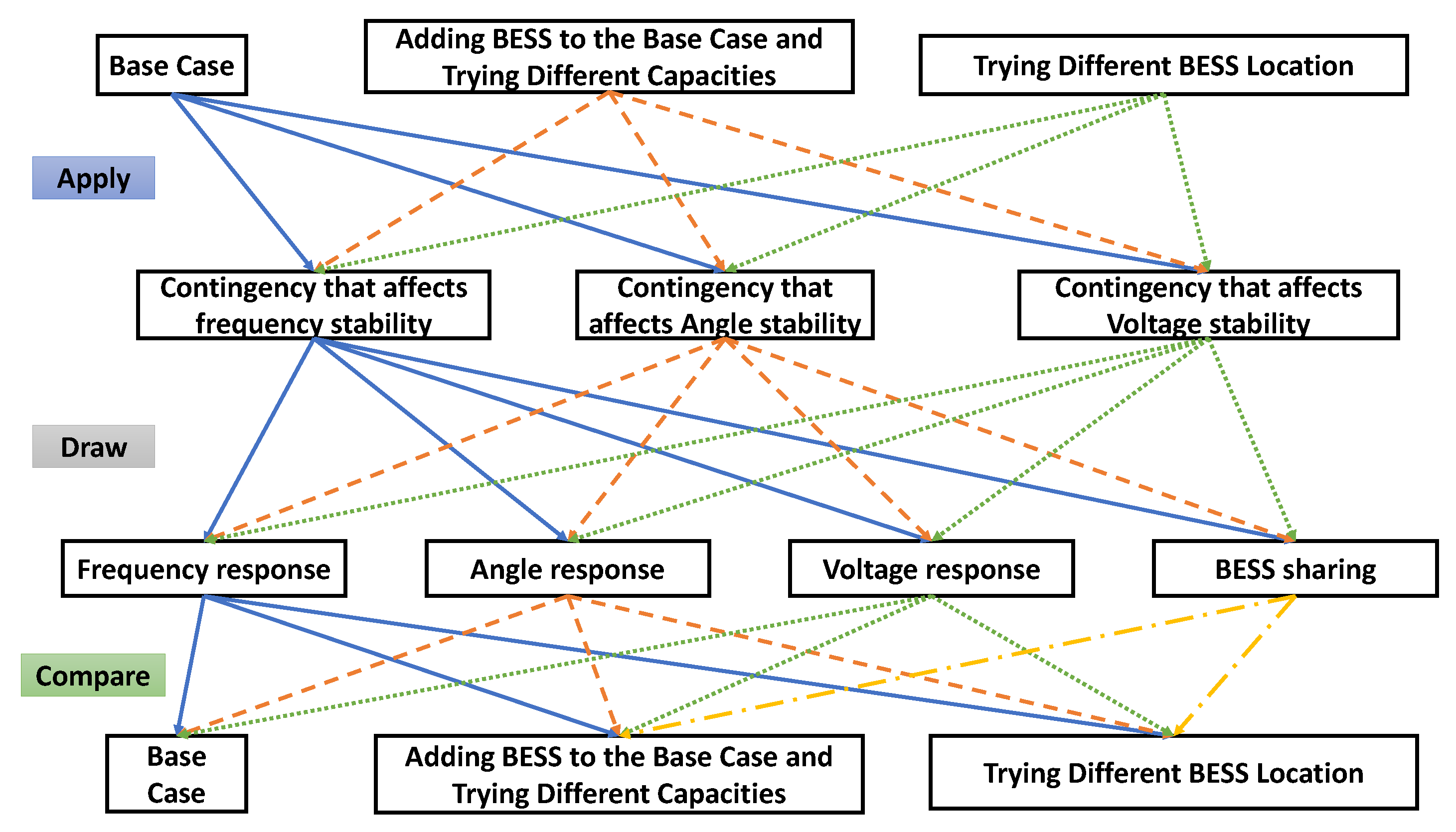
6.3. Methodology
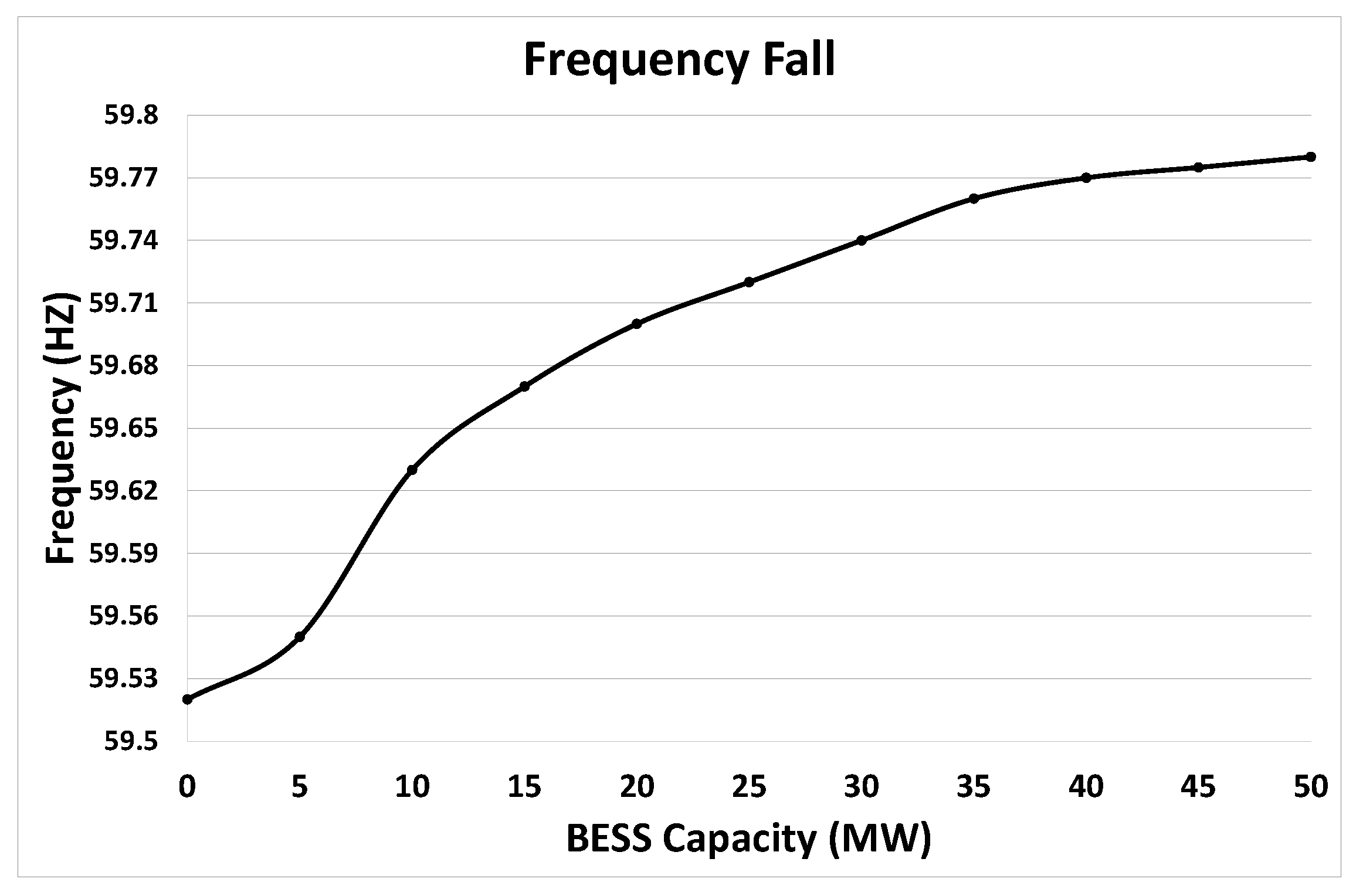
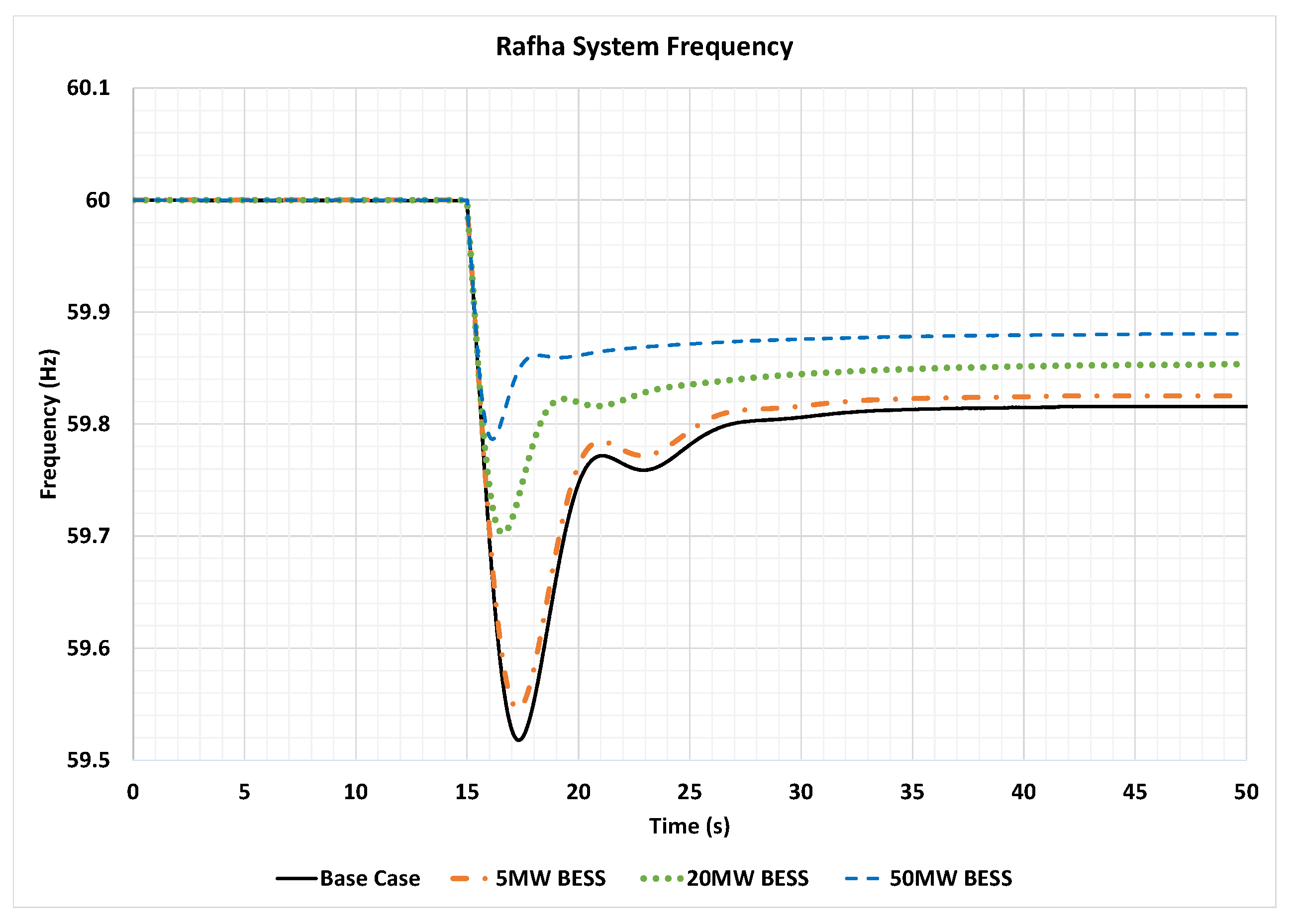
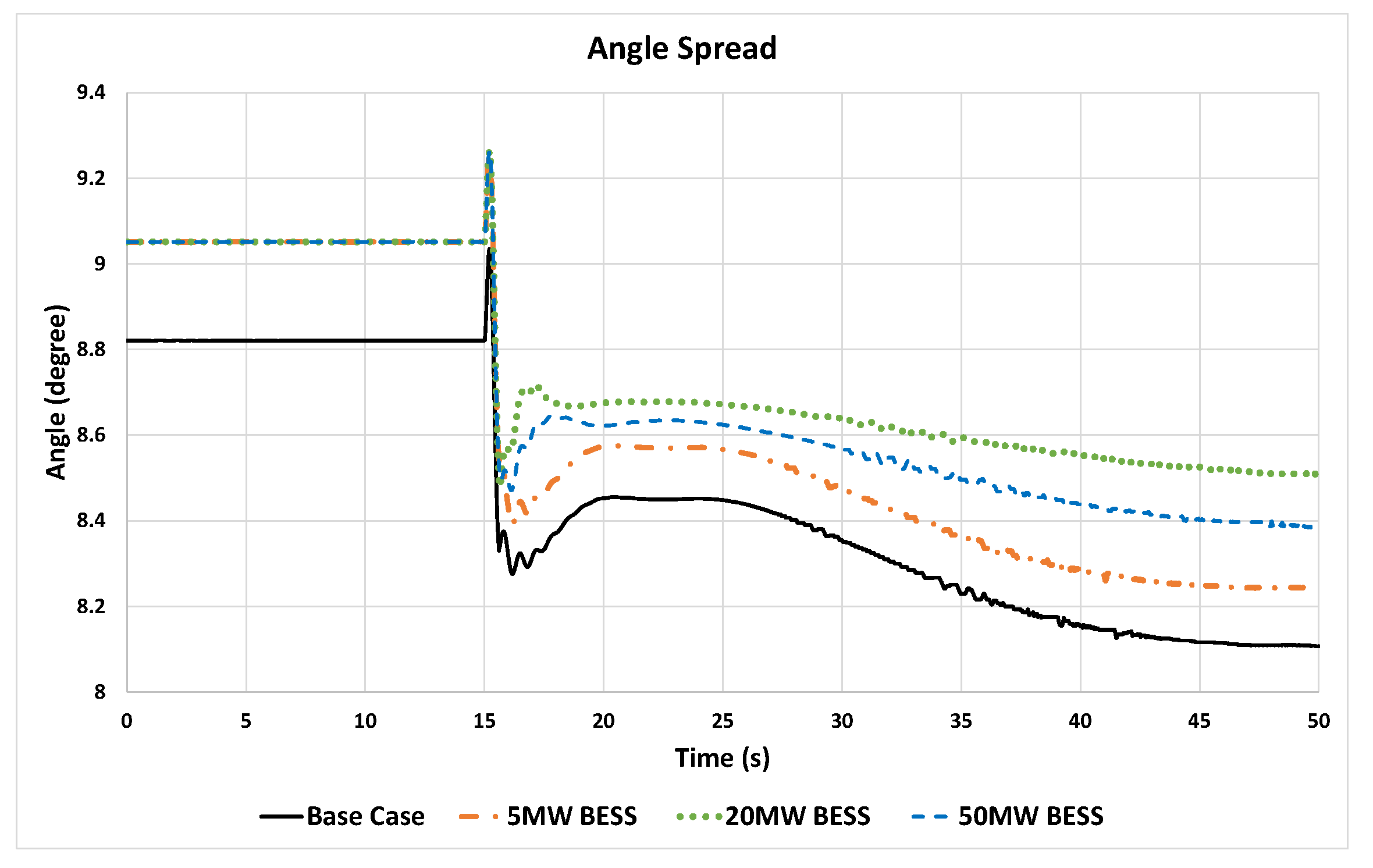
6.4. Testing System Performance with Different BESS Capacities and without BESS
- The system without BESS.
- The system with a 5 MVA capacity BESS.
- The system with a 20 MVA capacity BESS.
- The system with a 50 MVA capacity BESS.
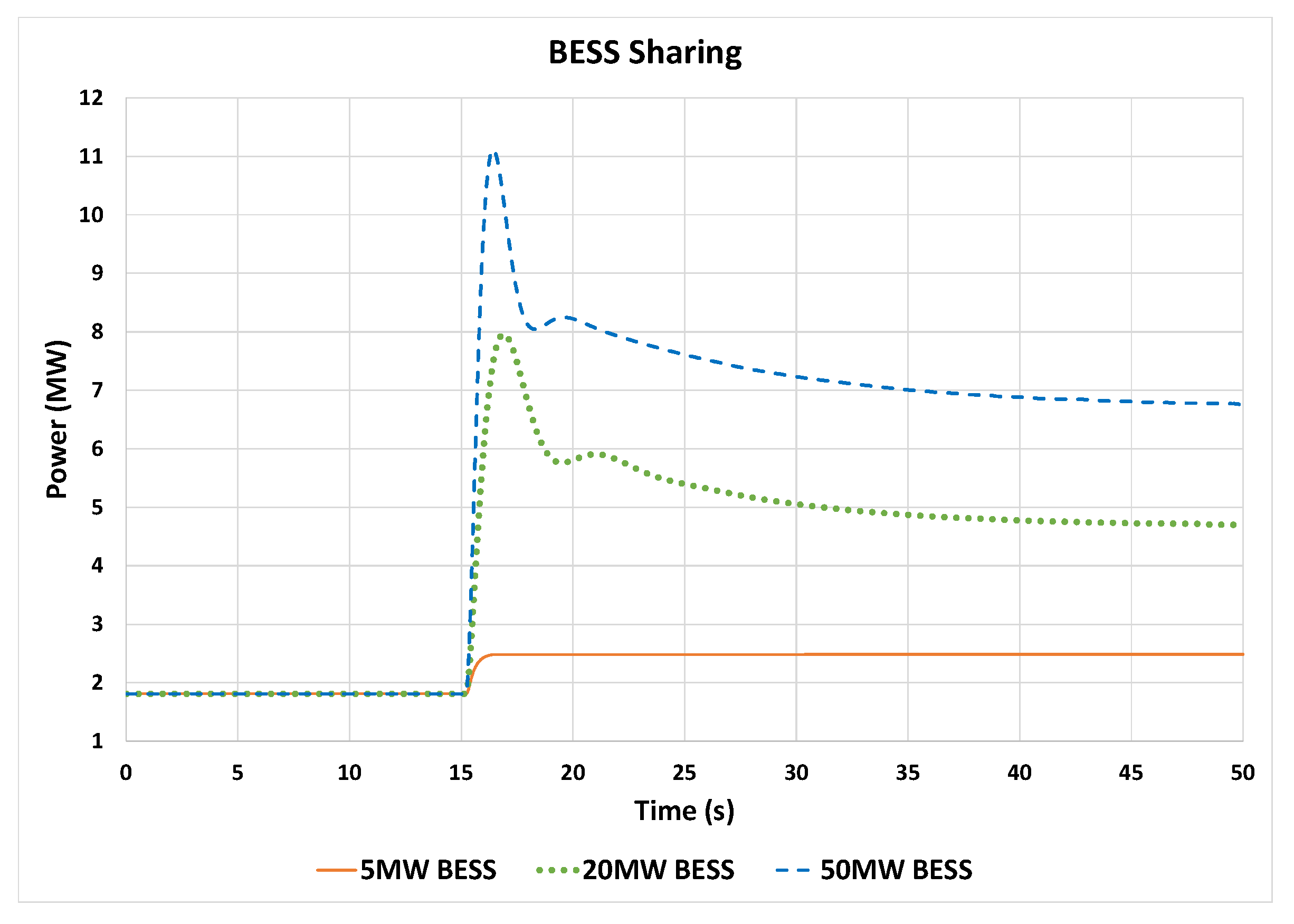
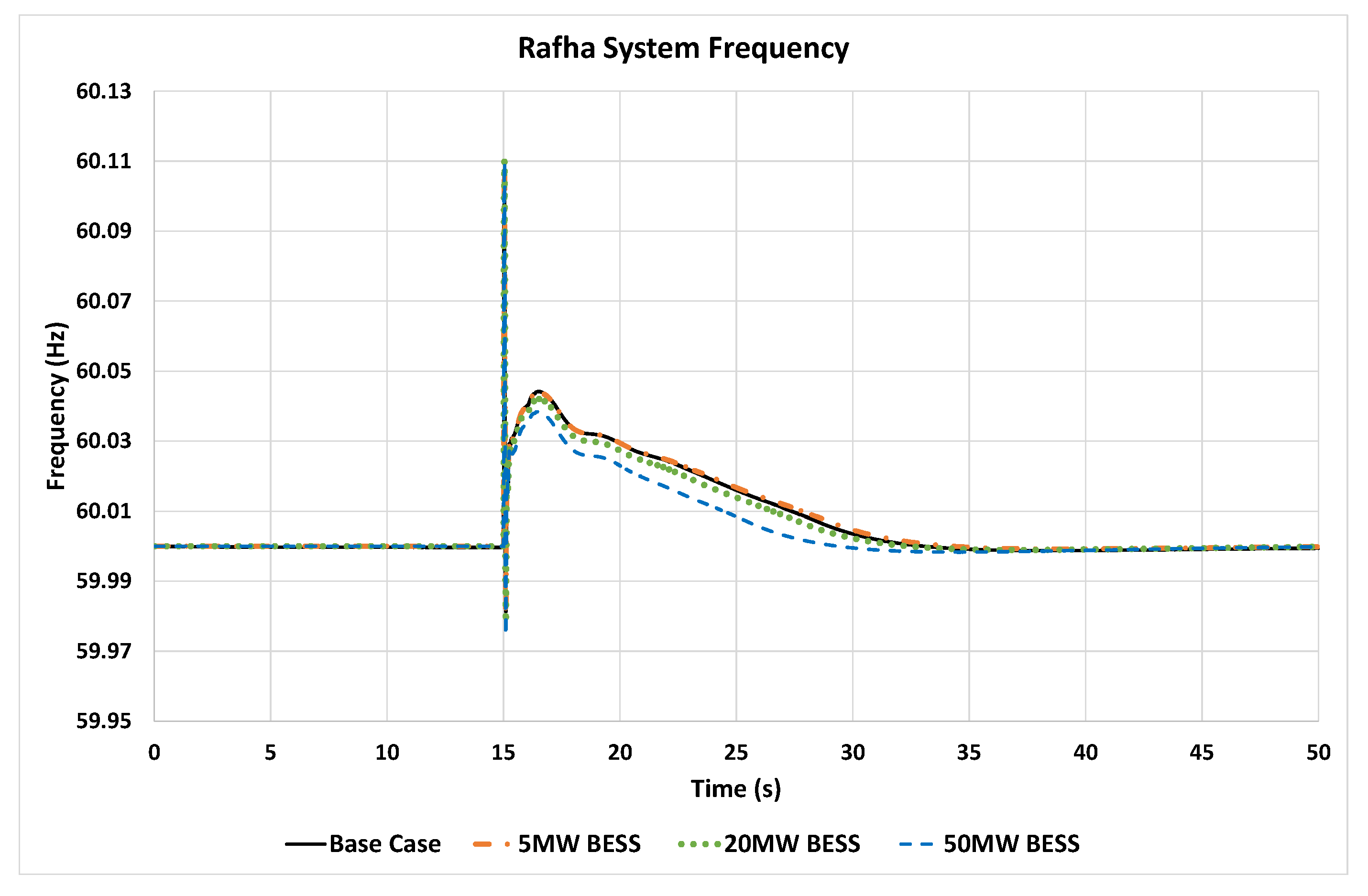
6.4.1. Case 11: Tripping of PV1 Generation
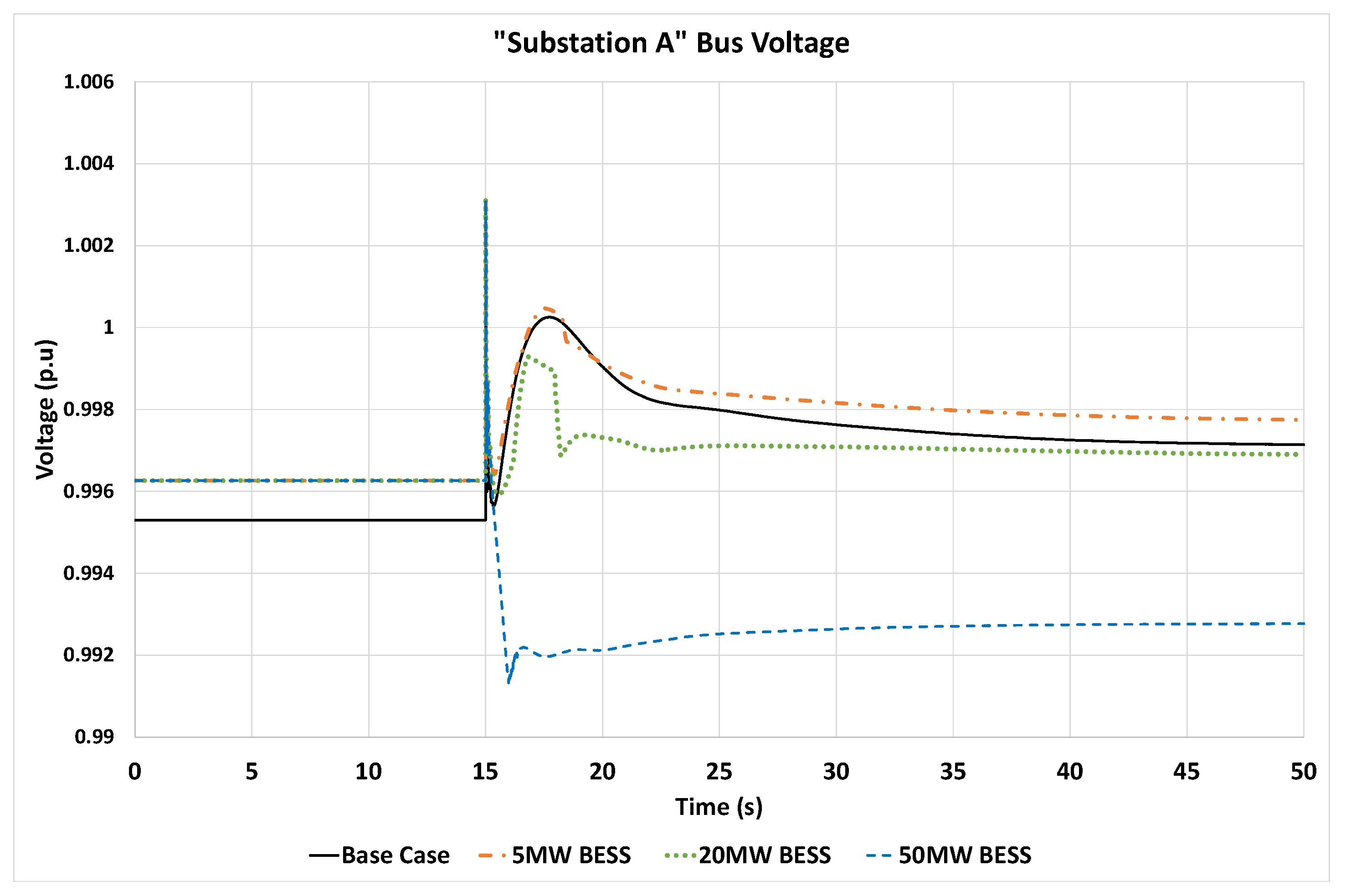
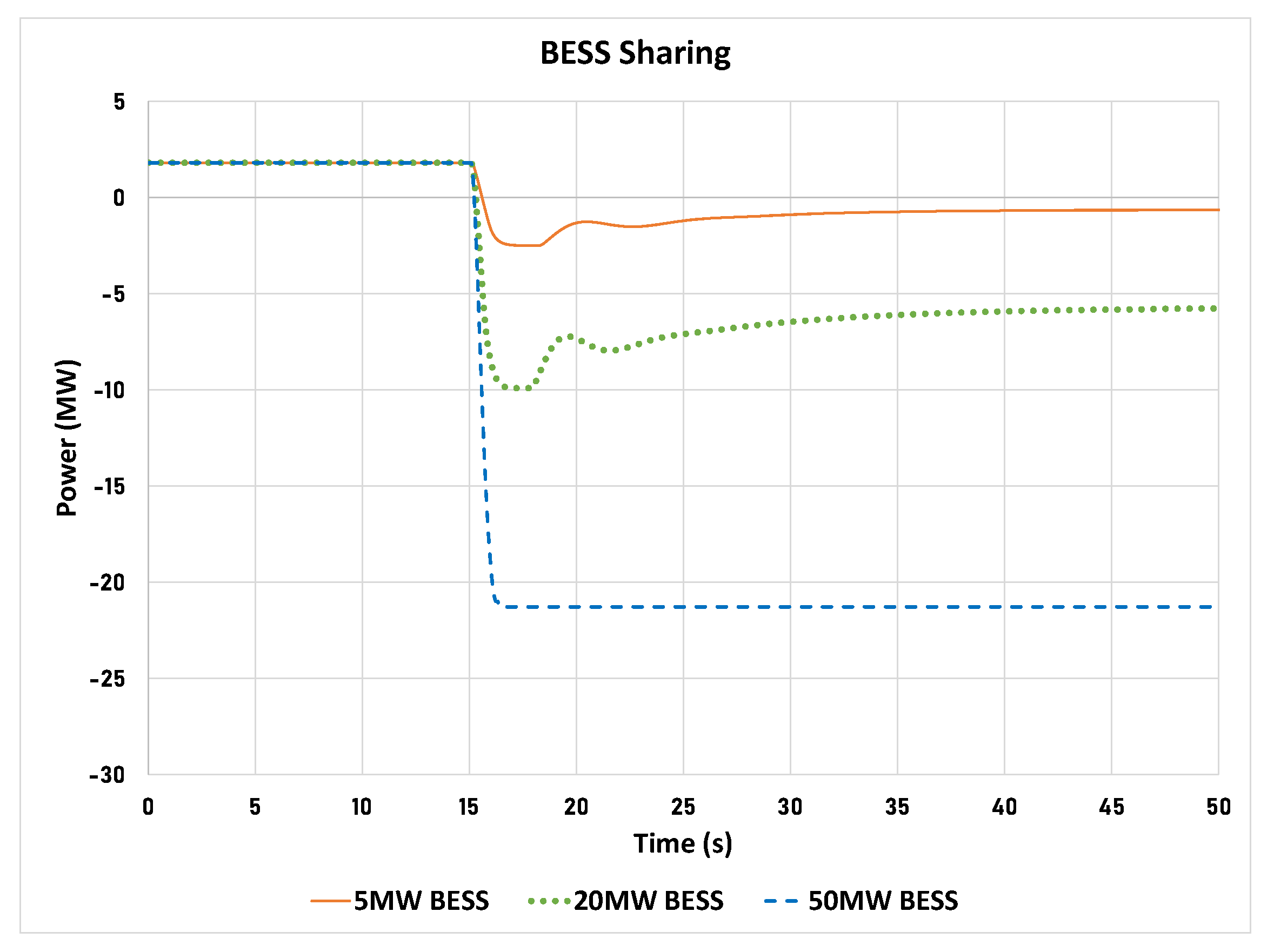
6.4.2. Case 12: Fault at GTI in substation A
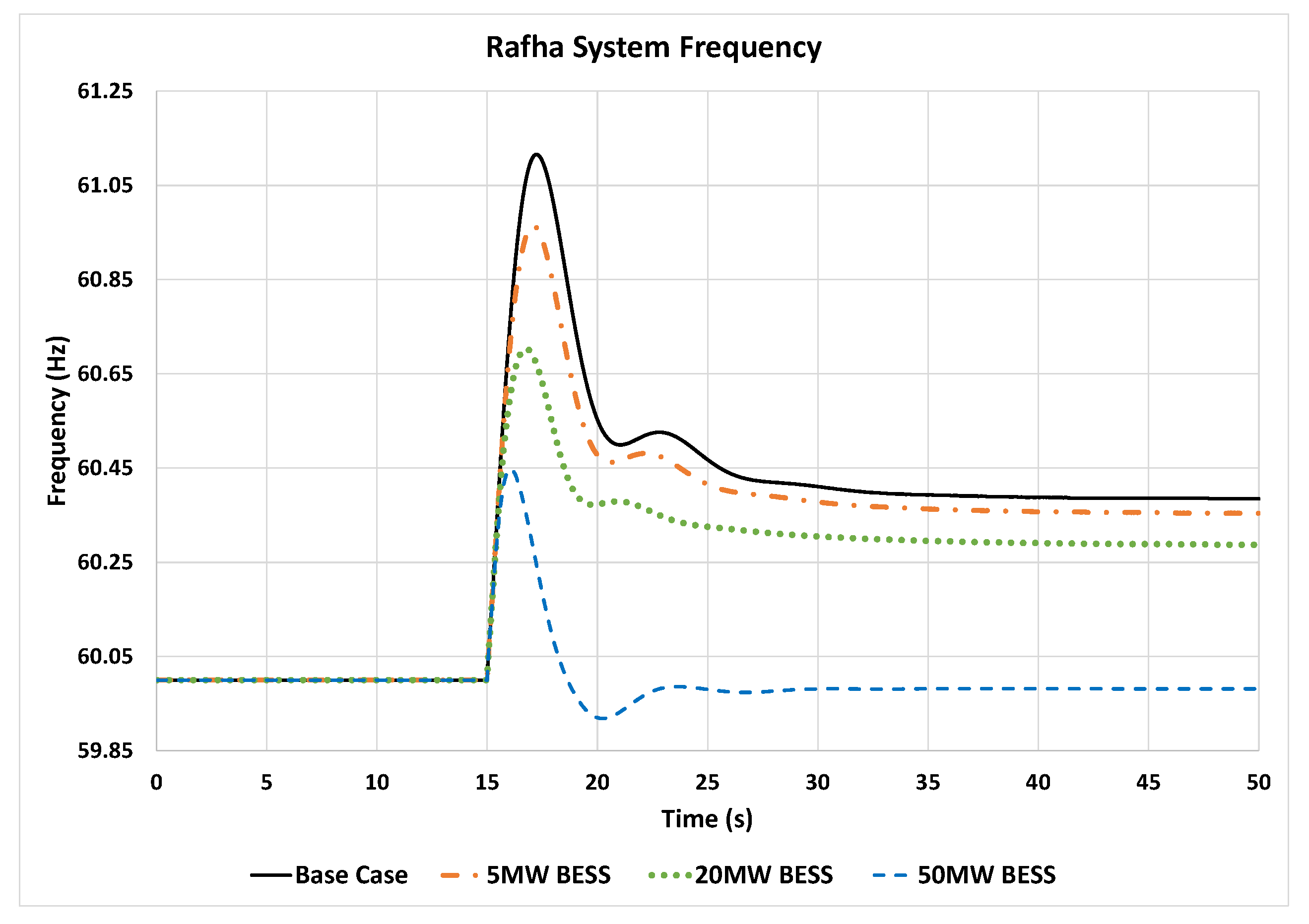
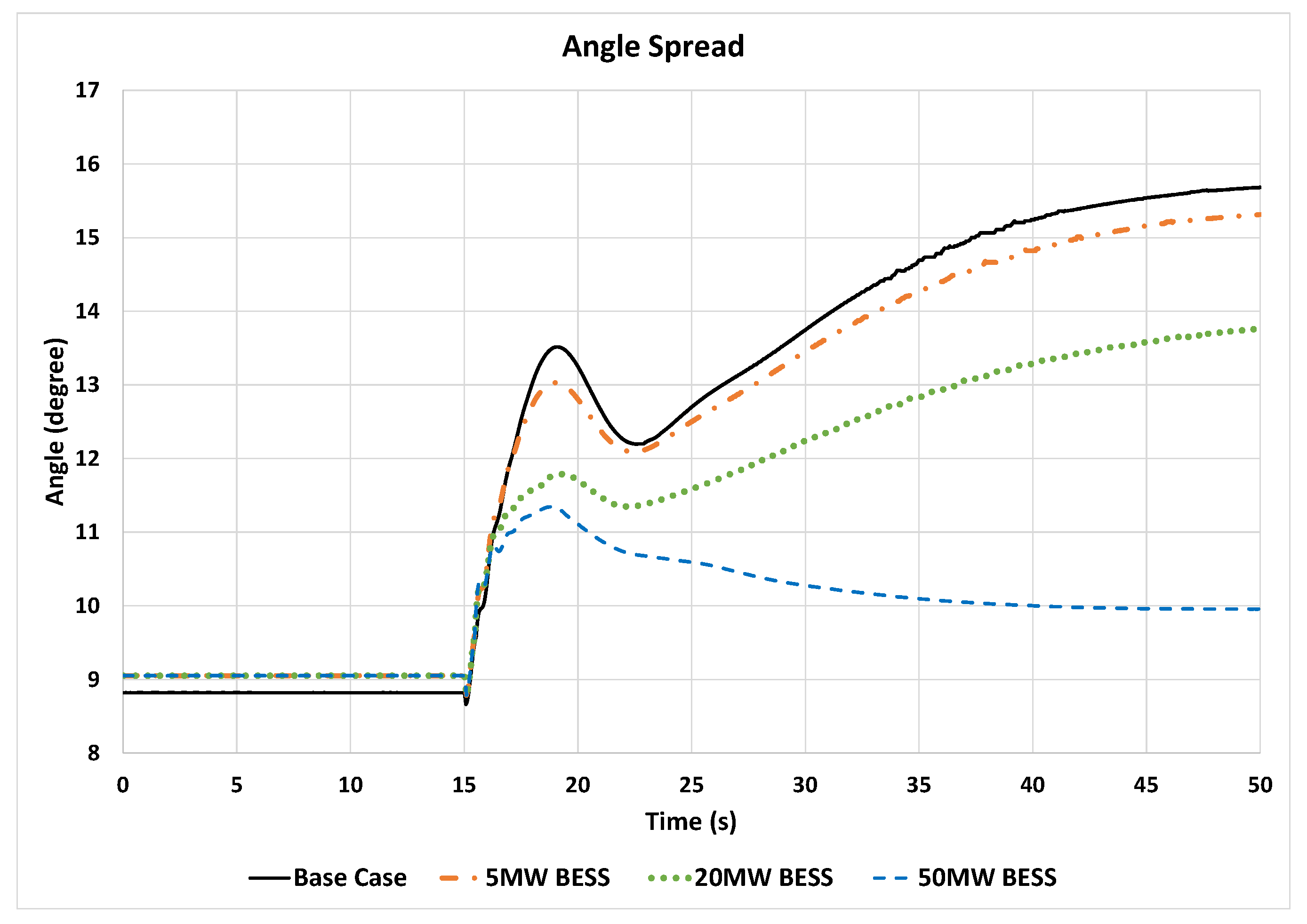
6.4.3. Case 13: Tripping of Substation D Load
6.5. Testing System Performance with Different Locations
6.5.1. Case 21: Tripping of PVI Generation
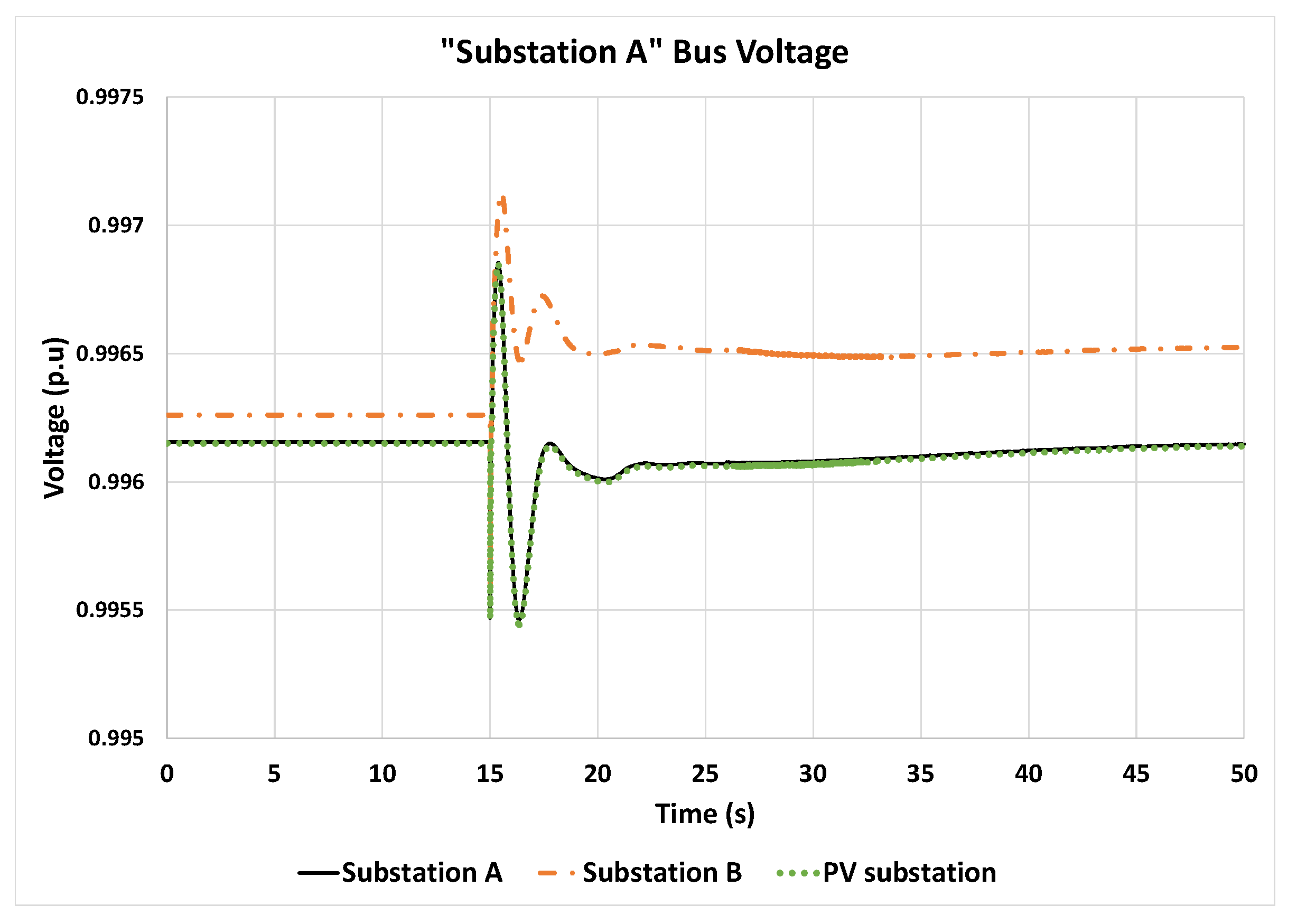
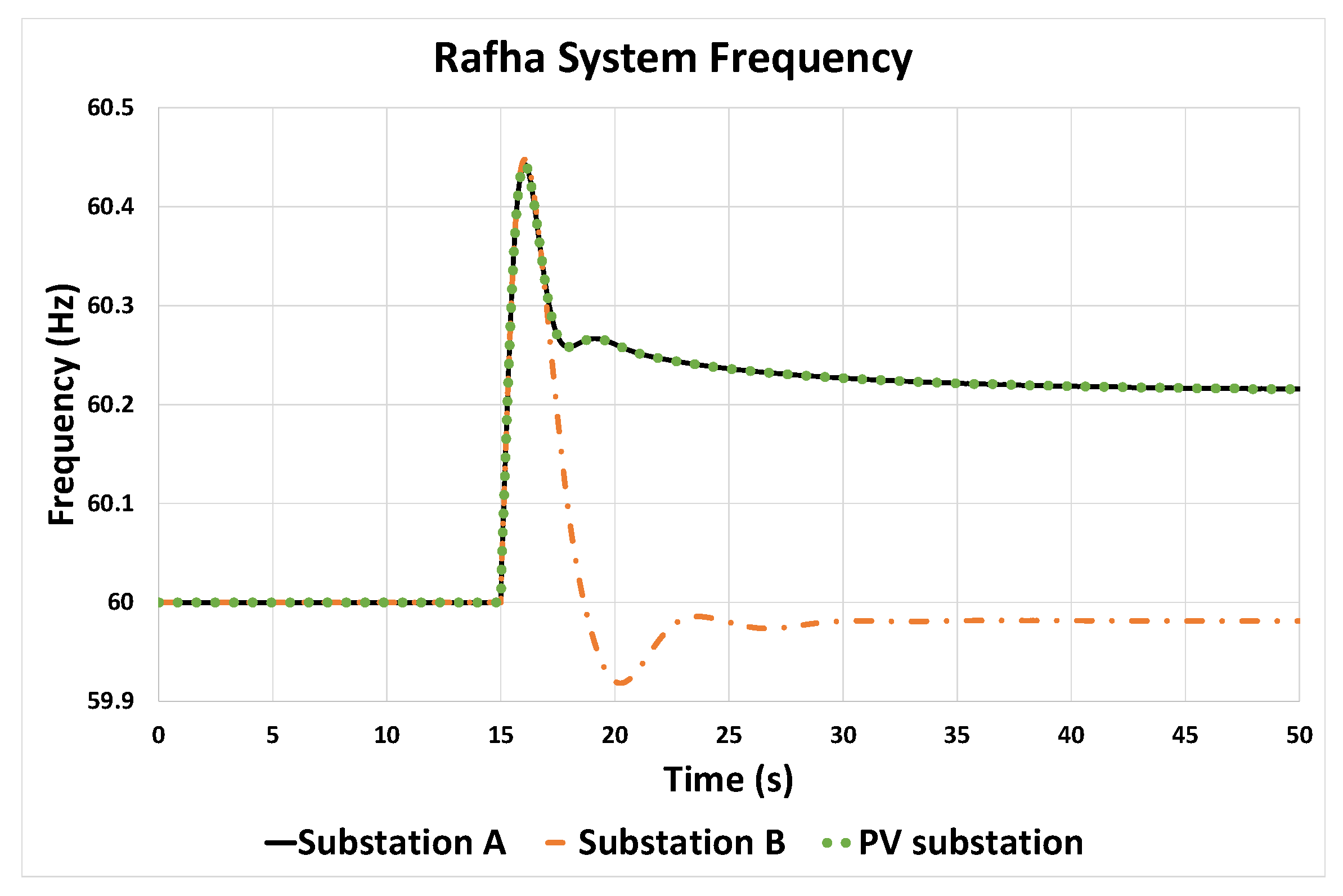
6.5.2. Case 22: Fault at GT1 in Substation A
6.5.3. Case 23: Tripping of Substation D Load
6.6. Summary
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| KSA | Kingdom of Saudi Arabia |
| PV | Photovoltaic |
| PSS/E | Power system simulator for engineering |
| ESS | Energy storage system |
| BESS | Battery energy storage system |
| WECC | Western Electricity Coordinating Council |
| NERC | North American Electric Reliability Corporation |
| AGC | Automatic generation control |
| RoCoF | Rate of change of frequency |
| P | Mechanical power input |
| P | Electrical power output |
| F | Frequency response |
| FBFR | Fall-based frequency response |
| H | System inertia |
| f | Nominal frequency |
| RES | Renewable energy sources |
| BPS | Depending on interconnection requirements and agreements |
| SR | Saudi Riyal |
| T | Converter time constant |
| LVPL | Low voltage power logic |
| Repwr | LVPL ramp rate limit |
| Brkpt | LVPL characteristic voltage 2 |
| Zerox | LVPL characteristic voltage 1 |
| Lvpl1 | LVPL gain |
| Vo | Voltage limit |
| Lvpnt1 | High voltage point |
| Lvpnt0 | Low voltage point |
| Io | Current limit |
| V | Voltage filter time constant |
| Khv | Overvoltage compensation gain used in the high voltage reactive current management |
| Iqr | Upper limit on rate of change for reactive current |
| Iqr | Lower limit on rate of change for reactive current |
| Accel | Acceleration factor |
| Lvplsw | Low voltage power logic |
| Ip | Active current command |
| Iq | Reactive power command |
| V | Terminal voltage |
| I | Active current |
| I | Reactive current |
| S | Transfer function |
| V | Low voltage threshold |
| V | Upper voltage limit |
| Try | Voltage filter time constant |
| dbd1 | Voltage error dead-band lower threshold |
| dbd2 | Voltage error dead-band upper threshold |
| K | Reactive current injection gain |
| I | Upper limit on reactive current injection |
| I | Lower limit on reactive current injection |
| V | User defined reference |
| T | Filter time constant for electrical power |
| Q | Upper limit for reactive power regulator |
| Q | Lower limit for reactive power regulator |
| V | Max. limit for voltage control |
| V | Min. limit for voltage control |
| K | Reactive power regulator proportional gain |
| K | Reactive power regulator integral gain |
| K | Voltage regulator proportional gain |
| K | Voltage regulator integral gain |
| T | Time constant on delay s4 |
| dP | Power reference max. ramp rate |
| dP | Power reference min. ramp rate |
| P | Max. power limit |
| P | Min. power limit |
| I | Maximum limit on total converter current |
| T | Power filter time constant |
| T | Voltage or reactive power measurement filter time constant |
| K | Reactive power PI control proportional gain |
| K | Reactive power PI control integral gain |
| T | Lead time constant |
| T | Lag time constant |
| V | Voltage below which state s2 is frozen |
| R | Line drop compensation resistance |
| X | Line drop compensation reactance |
| K | Reactive current compensation gain |
| e | Upper limit on dead-band output |
| e | Lower limit on dead-band output |
| dbd1 | Lower threshold for reactive power control dead-band |
| dbd2 | Upper threshold for reactive power control dead-band |
| Q | Upper limit on output of V/Q control |
| Q | Lower limit on output of V/Q control |
| K | Proportional gain for power control |
| Kig | Proportional gain for power control |
| T | Real power measurement filter time constant |
| fdbd1 | Dead-band for frequency control, lower threshold |
| Fdbd2 | Dead-band for frequency control, upper threshold |
| fe | Frequency error upper limit |
| fe | Frequency error lower limit |
| T | Power controller lag time constant |
| D | Droop for over-frequency conditions |
| D | Droop for under-frequency conditions |
| V | Reference for voltage control |
| Q | Reactive power reference |
| Freq | Frequency reference |
| Plant | Active power reference |
| P | Power generation |
| P | Maximum power |
| P | Minimum power |
| Q | Reactive power generation |
| Q | Maximum reactive power |
| Q | Minimum reactive power |
References
- Wang, M.; Ma, S.; Wang, T.; Zeng, S. Frequency stability analysis of high proportion renewable energy system delivered via DC. In Proceedings of the The 16th IET International Conference on AC and DC Power Transmission (ACDC 2020), Online Conference, 2–3 July 2020; Volume 2020, pp. 675–679. [Google Scholar] [CrossRef]
- Rahman, S.; Saha, S.; Islam, S.N.; Arif, M.T.; Mosadeghy, M.; Haque, M.E.; Oo, A.M.T. Analysis of Power Grid Voltage Stability With High Penetration of Solar PV Systems. IEEE Trans. Ind. Appl. 2021, 57, 2245–2257. [Google Scholar] [CrossRef]
- Kpoto, K.; Sharma, A.M.; Sharma, A. Effect Of Energy Storage System (ESS) in Low Inertia Power System with High Renewable Energy Sources. In Proceedings of the 2019 Fifth International Conference on Electrical Energy Systems (ICEES), Chennai, India, 21–22 February 2019; pp. 1–7. [Google Scholar] [CrossRef]
- Kinoshita, Y.; Kato, D.; Watanabe, M. Power System Simulator to Evaluate Impact of High Penetration of Renewable Energy Resources. In Proceedings of the 2020 59th Annual Conference of the Society of Instrument and Control Engineers of Japan (SICE), Chiang Mai, Thailand, 23–26 September 2020; pp. 571–576. [Google Scholar] [CrossRef]
- Amrouche, S.O.; Rekioua, D.; Rekioua, T. Overview of energy storage in renewable energy systems. In Proceedings of the 2015 3rd International Renewable and Sustainable Energy Conference (IRSEC), Marrakech, Morocco, 10–13 December 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Koohi-Fayegh, S.; Rosen, M. A review of energy storage types, applications and recent developments. J. Energy Storage 2020, 27, 101047. [Google Scholar] [CrossRef]
- Divya, K.; Østergaard, J. Battery energy storage technology for power systems—An overview. Electr. Power Syst. Res. 2009, 79, 511–520. [Google Scholar] [CrossRef]
- Urpelainen, J.; Van de Graaf, T. The International Renewable Energy Agency: A success story in institutional innovation? Int. Environ. Agreem. Politics Law Econ. 2015, 15, 159–177. [Google Scholar] [CrossRef]
- Ayadi, F.; Colak, I.; Garip, I.; Bulbul, H.I. Targets of Countries in Renewable Energy. In Proceedings of the 2020 9th International Conference on Renewable Energy Research and Application (ICRERA), Glasgow, UK, 27–30 September 2020; pp. 394–398. [Google Scholar] [CrossRef]
- Jäger-Waldau, A.; Huld, T.; Bódis, K.; Szabo, S. Photovoltaics in Europe after the Paris Agreement. In Proceedings of the 2018 IEEE 7th World Conference on Photovoltaic Energy Conversion (WCPEC) (A Joint Conference of 45th IEEE PVSC, 28th PVSEC 34th EU PVSEC), Waikoloa, HI, USA, 10–15 June 2018; pp. 3835–3837. [Google Scholar] [CrossRef]
- Ali, A.; Alsulaiman, F.A.; Irshad, K.; Shafiullah, M.; Alam Malik, S.; Hameed Memon, A. Renewable Portfolio Standard from the Perspective of Policy Network Theory for Saudi Arabia Vision 2030 Targets. In Proceedings of the 2021 4th International Conference on Energy Conservation and Efficiency (ICECE), Lahore, Pakistan, 16–17 March 2021; pp. 1–5. [Google Scholar] [CrossRef]
- Phurailatpam, C.; Rather, Z.H.; Bahrani, B.; Doolla, S. Estimation of Non-Synchronous Inertia in AC Microgrids. IEEE Trans. Sustain. Energy 2021, 12, 1903–1914. [Google Scholar] [CrossRef]
- Fernández-Guillamón, A.; Gómez-Lázaro, E.; Muljadi, E.; Molina-García, Á. Power systems with high renewable energy sources: A review of inertia and frequency control strategies over time. Renew. Sustain. Energy Rev. 2019, 115, 109369. [Google Scholar] [CrossRef]
- Kawabe, K.; Yokoyama, A. Effective utilization of large-capacity battery systems for transient stability improvement in multi-machine power system. In Proceedings of the 2011 IEEE Trondheim PowerTech, Trondheim, Norway, 19–23 June 2011; pp. 1–6. [Google Scholar] [CrossRef]
- Kandil, M.; El-Deib, A.A.; Elsobki, M.S. Enhancing The Power System Transient Stability by Using Storage Devices With High Penetration Of Wind Farms. In Proceedings of the 2020 6th International Conference on Electric Power and Energy Conversion Systems (EPECS), Istanbul, Turkey, 5–7 October 2020; pp. 13–18. [Google Scholar] [CrossRef]
- Daraiseh, F. Frequency response of energy storage systems in grids with high level of wind power penetration—Gotland case study. IET Renew. Power Gener. 2020, 14, 1282–1287. [Google Scholar] [CrossRef]
- Force, W.R.E.M.T. Wecc Battery Storage Dynamic Modeling Guideline; Western Electricity Coordinating Council: Salt Lake City, UT, USA, 2016. [Google Scholar]
- Corporation, N.A.E.R. Performance, Modeling, and Simulations of BPS-Connected Battery Energy Storage Systems and Hybrid Power Plants; NERC: Atlanta, GA, USA, 2021. [Google Scholar]
- Xu, X.; Bishop, M.; Oikarinen, D.G.; Hao, C. Application and modeling of battery energy storage in power systems. CSEE J. Power Energy Syst. 2016, 2, 82–90. [Google Scholar] [CrossRef]
- Ramírez, M.; Castellanos, R.; Calderón, G.; Malik, O. Placement and sizing of battery energy storage for primary frequency control in an isolated section of the Mexican power system. Electr. Power Syst. Res. 2018, 160, 142–150. [Google Scholar] [CrossRef]
- Kundur, P.; Paserba, J.; Vitet, S. Overview on definition and classification of power system stability. In Proceedings of the CIGRE/IEEE PES International Symposium Quality and Security of Electric Power Delivery Systems, 2003, Montreal, QC, Canada, 8–10 October 2003; pp. 1–4. [Google Scholar] [CrossRef]
- Kljajić, R.; Marić, P.; Glavaš, H.; Žnidarec, M. Microgrid Stability: A Review on Voltage and Frequency Stability. In Proceedings of the 2020 IEEE 3rd International Conference and Workshop in Óbuda on Electrical and Power Engineering (CANDO-EPE), Budapest, Hungary, 18–19 November 2020; pp. 47–52. [Google Scholar] [CrossRef]
- Farrokhabadi, M. Primary and Secondary Frequency Control; University of Waterloo: Waterloo, ON, Canada, 2017. [Google Scholar]
- Song, Y.; Hill, D.J.; Liu, T. Network-Based Analysis of Rotor Angle Stability of Power Systems; IEEE: New York City, NY, USA, 2020. [Google Scholar]
- Zhag, G. EPRI Power System Dynamics Tutorial; Electric Power Research Institute: Palo Alto, CA, USA, 2009. [Google Scholar]
- Chamorro, H.R.; Orjuela-Cañón, A.D.; Ganger, D.; Persson, M.; Gonzalez-Longatt, F.; Sood, V.K.; Martinez, W. Nadir Frequency Estimation in Low-Inertia Power Systems. In Proceedings of the 2020 IEEE 29th International Symposium on Industrial Electronics (ISIE), Delft, The Netherlands, 17–19 June 2020; pp. 918–922. [Google Scholar] [CrossRef]
- Bera, A.; Chalamala, B.; Byrne, R.H.; Mitra, J. Sizing of Energy Storage for Grid Inertial Support in Presence of Renewable Energy. IEEE Trans. Power Syst. 2021, 37, 3769–3778. [Google Scholar] [CrossRef]
- Jeong, S.; Lee, J.; Yoon, M.; Jang, G. Energy Storage System Event-Driven Frequency Control Using Neural Networks to Comply with Frequency Grid Code. Energies 2020, 13, 1657. [Google Scholar] [CrossRef]
- Alrumayh, O.; Sayed, K.; Almutairi, A. LVRT and Reactive Power/Voltage Support of Utility-Scale PV Power Plants during Disturbance Conditions. Energies 2023, 16, 3245. [Google Scholar] [CrossRef]
- Adewuyi, O.B.; Shigenobu, R.; Ooya, K.; Senjyu, T.; Howlader, A.M. Static voltage stability improvement with battery energy storage considering optimal control of active and reactive power injection. Electr. Power Syst. Res. 2019, 172, 303–312. [Google Scholar] [CrossRef]
- Boicea, V.A. Energy Storage Technologies: The Past and the Present. Proc. IEEE 2014, 102, 1777–1794. [Google Scholar] [CrossRef]
- Industry, S. Model Library PSS®E; Siemens Power Technologies International: Schenectady, NY, USA, 2018. [Google Scholar]
- Saudi Electricity Company. Rafha Peak Study in the Year 2025; National Grid SA: Riyadh, Saudi Arabia, 2022. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Substation | Voltage (KV) | Load (MW) | Load (Mvar) | Load (MVA) |
|---|---|---|---|---|
| Substation A 132/33 KV | 33 | 49.6 | 19.84 | 53.42 |
| Substation B 132/13.8 KV | 13.8 | 70.6 | 28.24 | 76.04 |
| Substation C | 132 | 60.6 | 24.24 | 65.27 |
| Substation D | 13.8 | 50.0 | 17.00 | 52.81 |
| Total | 230.8 | 89.32 | 247.54 |
| Generator | Substation | P (MW) | P (MW) | P (MW) | Q (Mvar) | Q (Mvar) | Q (Mvar) |
|---|---|---|---|---|---|---|---|
| GT 1 | Substation A | 20 | 33 | 0 | 1.4903 | 29 | −12 |
| GT 2 | Substation A | 27 | 30 | 0 | 1.5775 | 29 | −12 |
| GT 3 | Substation A | 32 | 76 | 0 | 3.5597 | 65 | −37 |
| GT 4 | Substation A | 35 | 70 | 0 | 4.3533 | 65 | −37 |
| GT 5 | Substation A | 35 | 76 | 0 | 3.6506 | 65 | −37 |
| PV 1 | PV substation | 20 | 81 | 0 | 0 | 0 | 0 |
| PV 2 | PV substation | 20 | 81 | 0 | 0 | 0 | 0 |
| PV 3 | PV substation | 20 | 81 | 0 | 0 | 0 | 0 |
| PV 4 | PV substation | 20 | 81 | 0 | 0 | 0 | 0 |
| BESS 1 | BESS substation | 1.8143 | 2.5 | −2.5 | 0.5074 | 2.5 | −2.5 |
| BESS 2 | BESS substation | 1.8143 | 2.5 | −2.5 | 0.5074 | 2.5 | −2.5 |
| Shunt/FACTs | Substation | Steps | Q (Mvar) | Q (Mvar) | Q (Mvar) |
|---|---|---|---|---|---|
| Capacitor 1 | Substation D | 1 | 7 | 7 | 0 |
| Capacitor 2 | Substation D | 1 | 7 | 7 | 0 |
| Capacitor bank | Substation B 132/13.8 KV | 3 | 21 | 21 | 0 |
| SVG | PV substation | - | 47.5 | 75 | −75 |
| Contingency | Different Capacity/without BESS | Different Locations |
|---|---|---|
| Tripping of PV1 generation | Case 11 | Case 21 |
| Fault at GT1 in substation A | Case 12 | Case 22 |
| Tripping of substation D load | Case 13 | Case 23 |
| BESS (MVA) | Fall-Based Frequency Response (MW/Hz) | Frequency Response (MW/Hz) |
|---|---|---|
| 0 | 41.7 | 105.3 |
| 5 | 44.4 | 111.1 |
| 20 | 66.7 | 133.3 |
| 50 | 90.9 | 161.3 |
| Case 1 | Generation Lost | Transient Fault | Load Lost |
|---|---|---|---|
| Frequency stability | Increase | Increase | Increase |
| Voltage Stability | Increase | - | Increase |
| Angle Stability | Increase | - | Increase |
| Case 2 | Generation Lost | Transient Fault | Load Lost |
|---|---|---|---|
| Frequency stability | - | - | Affected |
| Voltage Stability | Affected | - | Affected |
| Angle Stability | - | - | Affected |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alsalman, A.S.; Alharbi, T.; Mahfouz, A.A. Enhancing the Stability of an Isolated Electric Grid by the Utilization of Energy Storage Systems: A Case Study on the Rafha Grid. Sustainability 2023, 15, 13269. https://doi.org/10.3390/su151713269
Alsalman AS, Alharbi T, Mahfouz AA. Enhancing the Stability of an Isolated Electric Grid by the Utilization of Energy Storage Systems: A Case Study on the Rafha Grid. Sustainability. 2023; 15(17):13269. https://doi.org/10.3390/su151713269
Chicago/Turabian StyleAlsalman, Amer S., Talal Alharbi, and Ahmed A. Mahfouz. 2023. "Enhancing the Stability of an Isolated Electric Grid by the Utilization of Energy Storage Systems: A Case Study on the Rafha Grid" Sustainability 15, no. 17: 13269. https://doi.org/10.3390/su151713269