Abstract
With increasingly diverse customer demands and the rapid growth of the new energy logistics industry, establishing a sustainable and responsive logistics network is critical. In a multi-depot logistics network, adopting collaborative distribution and resource sharing can significantly improve operational efficiency. This study proposes collaboration and resource sharing for a multi-depot electric vehicle (EV) routing problem with time windows and dynamic customer demands. A bi-objective optimization model is formulated to minimize the total operating costs and the number of EVs. To solve the model, a novel hybrid algorithm combining a mini-batch k-means clustering algorithm with an improved multi-objective differential evolutionary algorithm (IMODE) is proposed. This algorithm integrates genetic operations and a non-dominated sorting operation to enhance the solution quality. The strategies for dynamically inserting customer demands and charging stations are embedded within the algorithm to identify Pareto-optimal solutions effectively. The algorithm’s efficacy and applicability are verified through comparisons with the multi-objective genetic algorithm, the multi-objective evolutionary algorithm, the multi-objective particle swarm optimization algorithm, multi-objective ant colony optimization, and a multi-objective tabu search. Additionally, a case study of a new energy logistics company in Chongqing City, China demonstrates that the proposed method significantly reduces the logistics operating costs and improves logistics network efficiency. Sensitivity analysis considering different dynamic customer demand response modes and distribution strategies provides insights for reducing the total operating costs and enhancing distribution efficiency. The findings offer essential insights for promoting an environmentally sustainable and resource-efficient city.
1. Introduction
With advancements in electric vehicle (EV) technology and growing societal concerns regarding environmental sustainability, an increasing number of individuals and organizations are opting to replace traditional fuel vehicles with EVs [1,2,3]. Compared to conventional fuel vehicles, EVs are considered a more sustainable solution for cargo distribution due to their zero emissions, low noise, and reduced energy consumption, all contributing to lower logistics costs while alleviating environmental pollution [4,5]. However, despite the growing adoption of EVs, insufficient charging infrastructure remains a significant challenge, hindering their widespread implementation in logistics networks. For instance, a study on e-mobility infrastructure in the Górnośląsko-Zagłębiowska Metropolis, Poland, highlights the current limitations of charging networks and their potential for development, emphasizing the necessity of expanding charging infrastructure to support the increasing use of EVs [6]. This issue underscores the need for the effective planning and optimization of EV distribution networks, ensuring not only route efficiency but also the strategic placement of charging stations to overcome operational constraints. Therefore, both academic researchers and logistics service providers have dedicated significant attention to developing efficient EV distribution networks and optimizing vehicle routing to improve operational performance and environmental benefits.
In recent years, the rapid expansion of online shopping platforms has transformed consumption patterns for a significant segment of the population, subsequently driving the swift development of logistics distribution systems [7,8]. However, the dynamic nature of customer behavior renders their location, time preferences, and demands unpredictable prior to route planning, thereby presenting challenges for prompt responses to customers with dynamic demands (CDDs) and the effective scheduling of logistics resources [9,10]. Additionally, the limited driving range of EVs, constrained by battery capacity, necessitates that these vehicles visit charging stations (CSs) when their remaining charge is insufficient to fulfill deliveries for subsequent customers along their routes [3,11,12]. Therefore, the efficient planning of EV charging routes and timely responses to dynamic customer demands are essential for minimizing the total operating cost (TOC) and enhancing delivery efficiency. This study proposes a collaborative approach to resource sharing in a multi-depot electric vehicle routing problem with time windows and dynamic customer demands (MDEVRPTW-DD).
In the MDEVRPTW-DD framework, depots can share customer information and facilitate collaborative distribution, which helps reduce long distances and cross transportation [12,13]. Moreover, the shared use of CSs across multiple depots can effectively mitigate the imbalanced utilization of these stations resulting from private ownership and the exclusive service provided to a single depot’s EVs [14,15]. Logistics managers are motivated by economic considerations, leading them to prioritize the minimization of the TOC and the number of EVs as the primary objectives for optimizing a logistics network [10,16]. To achieve these objectives, this study proposes a hybrid heuristic algorithm that combines a mini-batch k-means clustering algorithm with an improved multi-objective differential evolutionary (IMODE) algorithm to address the MDEVRPTW-DD. Several genetic operations and non-dominated sorting mechanisms are incorporated within the IMODE algorithm to enhance the solution quality. The effectiveness and applicability of the proposed algorithm are validated by comparing it with the multi-objective genetic algorithm (MOGA), the multi-objective evolutionary algorithm (MOEA), multi-objective particle swarm optimization (MOPSO), multi-objective ant colony optimization (MOACO), and a multi-objective tabu search (MOTS). Furthermore, the results clearly demonstrate the algorithm’s robustness and its superior performance over five heuristic algorithms in terms of solution accuracy and computational efficiency. Moreover, a dynamic customer insertion strategy is proposed to facilitate the integration of CDDs into routes with static demands (CSDs) and to adjust delivery routes accordingly to minimize the TOC. Additionally, a charging station insertion strategy is proposed to identify the optimal CSs based on an EV’s remaining power and geographic feasibility, thereby ensuring the efficient operation of EVs.
The remainder of this study is organized as follows. Section 2 presents a review of the relevant literature. Section 3 addresses the MDEVRPTW-DD. Section 4 illustrates the relevant definitions and constructs a multi-objective optimization model. Section 5 proposes the IMODE algorithm based on mini-batch k-means. Subsequently, Section 6 outlines a practical experiment conducted in Chongqing City, China. Finally, Section 7 summarizes this study and suggests directions for further research.
2. Literature Review
With the increasing emphasis on low-carbon initiatives and environmental protection, the electric vehicle routing problem (EVRP) has gained extensive scholarly interest [3,13]. As research advances, additional factors such as the multi-depot configuration and dynamic customer demands have been integrated into standard EVRP studies [5,8]. Moreover, in light of economic and environmental considerations, collaboration and resource sharing have emerged as effective strategies for reducing costs and enhancing efficiency. Various algorithms have been investigated for addressing the EVRP [13,15]. Therefore, this study presents a literature review of an MDEVRPTW-DD, focusing on the problem, strategies, and solution methods.
2.1. Electric Vehicle Routing Problem with Dynamic Customer Demand
With advancements in EV technology and an increasing demand for sustainable transportation, the EVRP that considers CDDs has attracted considerable attention from researchers [2,4,5]. Allahyari et al. [1] explored the dynamic vehicle routing problem with the objectives of minimizing operational costs and risks, employing heuristic algorithms such as the greedy randomized adaptive search procedure and iterated local search to enhance routing solutions under uncertainty. Basso et al. [5] proposed an EVRP optimization model that accounts for dynamic demand, aiming to minimize electricity consumption (EC) and developed an improved tabu search algorithm to solve the model. Dong et al. [7] introduced an EVRP model that considers dynamic demand with the goal of minimizing logistics costs, subsequently designing an improved memetic algorithm to solve this issue. Alvarez et al. [9] assigned CDDs to drivers and dynamically adjusted customer service relationships to optimize distribution routes while balancing driver consistency, routing costs, and service penalties within a two-stage stochastic programming framework.
Numerous studies examine the complexities of CDDs by transforming dynamic customers into static ones through various methodologies. Li et al. [8] converted dynamic demand into a static format by segmenting the service time of the distribution center, developing a vehicle routing model aimed at minimizing distribution distance and solving it using an adaptive genetic algorithm. The current literature suggests that some researchers have explored the segmentation of service time periods while incorporating the characteristics of dynamic demand. Furthermore, investigations have been conducted into the formulation of optimization models for the EVRP under dynamic demand conditions, with the design of relevant solution algorithms. Nevertheless, the integration of CDD response characteristics into the EVRP is an area that requires additional rigorous research, as this aspect has not been adequately addressed in the existing body of work.
2.2. Multi-Depot Electric Vehicle Routing Problem
The multi-depot electric vehicle routing problem (MDEVRP) has gained significant attention due to its complexity and practical significance in sustainable logistics. Researchers have examined various optimization models and heuristic algorithms to address critical factors such as vehicle speed, load capacity, travel distance, and energy consumption [10,12,14]. Basso et al. [5] tackled the range limitation in an MDEVRP by developing a power usage model to estimate energy consumption based on detailed topography and vehicle speeds, subsequently optimizing the charging routes for EVs. Lu et al. [11] formulated an MDEVRP model to identify the optimal distribution routes for EVs, taking into account the effects of vehicle load, speed, and travel distance on energy consumption. Karimpour et al. [13] proposed an MDEVRP model that minimizes logistics costs by considering vehicle speed, load capacity, and road gradient, followed by the development of an improved adaptive algorithm to solve the model. Wang et al. [12] investigated an MDEVRP using a bi-objective optimization model aimed at minimizing both the TOC and the number of vehicles, incorporating factors such as vehicle speed, load capacity, and travel distance, and they solved it with a hybrid algorithm that integrates a tabu search and genetic algorithms. Agrali and Lee [16] addressed an MDEVRP with constraints on time windows, battery capacity, and vehicle load limits, formulating a mixed-integer programming model designed to minimize EV pickup and delivery costs, while proposing a hybrid algorithm that combines simulated annealing and a large neighborhood search. Zhang et al. [17] optimized EV routing by minimizing logistics costs while considering energy consumption as a function of travel distance, subsequently proposing an improved adaptive large neighborhood search algorithm for problem resolution. Collectively, these studies illustrate the significant influence of factors such as vehicle speed, travel distance, and load capacity on the energy consumption models, heuristic algorithm designs, and operational costs in EV routing. These contributions offer valuable methodological insights for optimizing the MDEVRP.
2.3. Collaborative and Resource Sharing
With the growing competition in the logistics industry, collaboration has emerged as a significant focus for researchers seeking to enhance logistics efficiency. Resource sharing, including the joint utilization of transportation vehicles and customer information, is a crucial approach to fostering collaboration [15,18,19]. By capitalizing on shared resources, logistics enterprises can achieve cost reductions and improvements in operational efficiency. Lu et al. [18] investigated the optimal allocation of leased charging stations for shared electric delivery vehicles by developing a mixed-integer programming model and proposing an enhanced heuristic algorithm to address the issue. Mancini et al. [19] tackled the problem of underutilized vehicle capacity by establishing a multi-depot collaborative strategy that facilitates the sharing of customer demands and transportation vehicles, which ultimately leads to improved vehicle loading rates and reductions in the TOC. Sarbijan and Behnamian [20] explored the multi-depot collaborative vehicle routing problem with shared customer demands and developed a model aimed at maximizing customer satisfaction. They subsequently designed a particle swarm optimization algorithm based on a variable neighborhood search to solve this model. Li et al. [15] addressed the challenge posed by inadequate charging infrastructure by proposing the leasing of private CSs to facilitate and promote the sharing of charging resources. Their study demonstrates that this approach can effectively enhance the utilization of charging station resources. Ahari et al. [21] examined the multi-depot collaborative vehicle routing problem with shared transportation vehicles, analyzing the variations in vehicle utilization rates under different ownership scenarios. These studies indicate that research on transportation resource sharing predominantly centers on vehicle sharing, charging station sharing, and customer demand sharing. However, further investigation is necessary regarding the shared scheduling of multi-depot electric delivery vehicles, which would integrate leased CSs, private CSs, delivery vehicles, and dynamic customer demands.
2.4. Relevant Solution Methods
Researchers have developed various approaches to address the vehicle routing problem and its variants, including exact and heuristic algorithms. However, the majority of scholars favor heuristic algorithms for problem solving, as the EVRP is classified as NP-hard, and exact algorithms are typically viable only for small-scale scenarios [14,19]. For example, Zhang et al. [22] proposed a heuristic algorithm based on ant colony optimization to optimize the distribution routes of EVs while minimizing power consumption. Pelletier et al. [23] developed a heuristic algorithm utilizing a large neighborhood search to analyze the effects of several factors, such as weather, road conditions, and driver behavior, on the energy consumption of EVs during the delivery process. Comert and Yazgan [24] created a hybrid algorithm that integrates ant colony optimization with artificial bee colony algorithms to determine optimal EV routes taking into account various charging strategies and charging station types.
Differential algorithms, recognized as one of the most popular evolutionary algorithms, are extensively applied to solve vehicle routing problems [25,26,27]. Wu et al. [28] proposed a novel method that combines the particle swarm algorithm with differential evolution, aiming to identify optimal routes and charging schemes for EVs. Liu et al. [29] designed specific operators within the differential evolutionary algorithm to determine optimal distribution routes and charging station selections for EVs. Sethanan and Jamrus [30] proposed a hybrid differential evolutionary algorithm incorporating genetic operators to tackle the multi-trip vehicle routing problem with backhaul and heterogeneous fleets. Souza et al. [31] developed a discrete adaptive differential evolutionary algorithm to address capacity-constrained vehicle routing problems in conjunction with a local search algorithm. The methodologies presented in the existing literature provide valuable insights for an MDEVRPTW-DD.
Despite the contributions of the aforementioned studies, several limitations persist. (1) Existing research often simplifies dynamic customers by modeling them as static entities, and the dynamic adjustment methods based on customer insertion strategies have not been adequately explored. (2) There has been limited focus on the detailed analysis of the application of the charging station sharing strategy and the insertion strategy within multi-depot EV distribution networks. (3) A comprehensive mathematical model that simultaneously incorporates resource sharing among transportation, CSs, and customer demand in an MDEVRPTW-DD is notably absent in current research. (4) Existing heuristic and evolutionary algorithms demonstrate low computational efficiency when addressing EV distribution networks characterized by dynamic customer demand, charging station selection, and resource sharing.
In comparison with previous related studies, this study offers several significant contributions. (1) A dynamic customer insertion strategy is proposed in an MDEVRPTW-DD to integrate CDDs into routes with CSDs and adjust delivery routes, thereby establishing a responsive logistics network. (2) A charging station insertion strategy based on the sharing of charging stations is outlined to determine the optimal location for CSs based on an EV’s remaining power and geographic feasibility, ensuring the efficient operation of EVs and reducing energy consumption. (3) This study proposes a bi-objective mixed-integer linear programming model that incorporates resource sharing, CSs, and customer demand, with the aim of minimizing the TOC and NEV in multi-depot EV distribution networks. (4) This study develops a hybrid algorithm that combines the mini-batch k-means clustering algorithm and the IMODE algorithm to identify optimal solutions. Experiments and comparisons with other algorithms demonstrate satisfactory performance within acceptable computational timeframes.
This study builds upon these contributions by further integrating advanced optimization methods to enhance the efficiency and sustainability of multi-depot EV distribution networks. By addressing key challenges such as dynamic customer demands, resource sharing, and charging station allocation, this study optimizes logistics operations by formulating a bi-objective optimization model to minimize the TOC and NEV, supported by a novel hybrid algorithm that integrates mini-batch k-means clustering and the IMODE algorithm. The algorithm’s effectiveness is validated through extensive comparisons with five heuristic algorithms, while a real-world case study in Chongqing City, China, demonstrates its practical benefits in optimizing logistics operations. Sensitivity analysis on different dynamic customer demand response modes and distribution strategies provides further insights into improving cost efficiency and resource utilization. The findings offer practical insights for logistics managers seeking to enhance resource allocation and operational efficiency in EV logistics networks.
3. Problem Statement
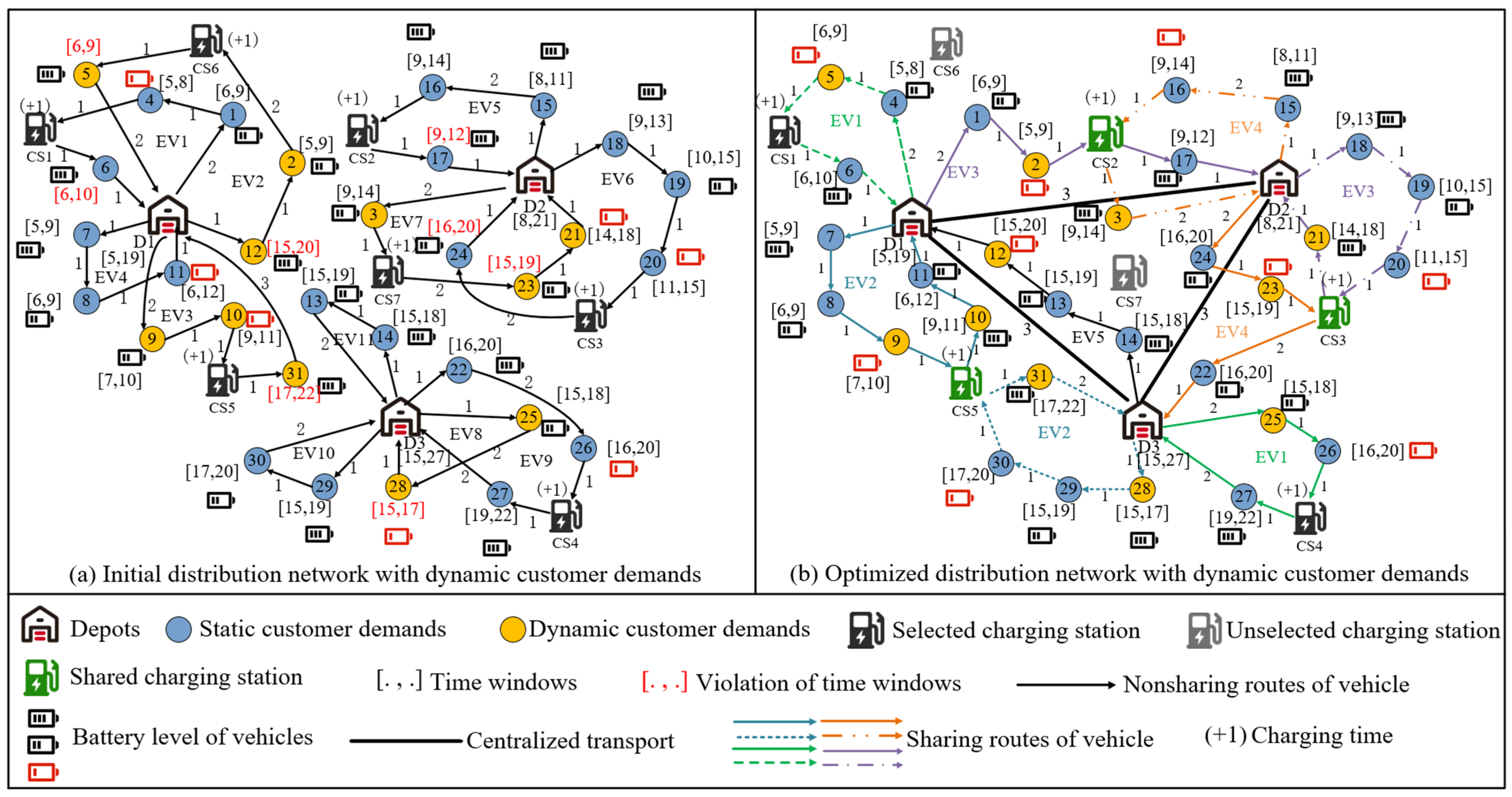
The MDEVRPTW-DD seeks to optimize EV routes across multiple depots through the implementation of collaborative resource-sharing strategies, dynamic customer insertion, and charging station insertion strategies, with the objective of minimizing the TOC and NEV. The problem includes two types of customers: CSDs and CDDs. Through resource sharing, customer demands are redistributed across depots, and electric trucks (ETs) are utilized for the centralized transportation of demands prior to EV deliveries. The dynamic customer insertion strategy integrates CDDs into the initial routes to satisfy their demands. To ensure that EVs possess sufficient energy for customer service, they must recharge at CSs or depots. Figure 1 illustrates the non-optimized and optimized MDEVRPTW-DD distribution networks, which consist of three depots (D1, D2, D3), seven CSs (CS1–CS7), and 31 customers (C1–C31). The numbers besides the delivery routes indicate the travel time between nodes.
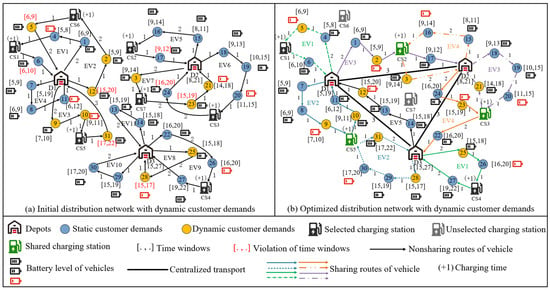
Figure 1.
Illustration of the initial and optimized MDEVRPTW and with dynamic customer demands.
Figure 1a depicts an initial distribution network in which each depot operates independently, dispatching EVs separately to serve CSDs and CDDs. Moreover, EVs can only recharge at their respective depots or CSs, resulting in the low utilization rates of CSs and an increased number of EVs, thereby elevating delivery costs. Additionally, inefficient delivery routes and long-distance travel contribute to violations of customer time windows within the non-optimized network.
In Figure 1b, customers are reassigned to the nearest depot based on geographic locations. Depots develop optimized delivery routes for CSDs considering geographic locations, time windows, and demand, while CDDs are either incorporated into the initial routes or served by new EVs. This leads to more organized delivery routes and a reduction in the violations of customer time windows. Additionally, five CSs support the EVs, three of which are shared among the depots, thereby decreasing the total number of charging stations (NCS). Since EVs can be utilized across depots and can return to any depot upon completing a route, the NEV is significantly reduced. Therefore, resource sharing, dynamic customer insertion, and charging station strategies are implemented among depots, enhancing the utilization of both EVs and CSs, ultimately lowering the TOC and fostering the sustainable development of urban logistics.
To evaluate the effect of MDEVRPTW-DD optimization, the specific costs and indicators are quantified. The EC of EVs per unit time is 8 kWh, with the price per kWh set at USD 3. The penalty cost (PC) per time unit is USD 2, the insertion cost (IC) per CDD is USD 10, the rental cost (RC) per EV is USD 50, and the centralized transport cost (CTC) per time unit is USD 40. Table 1 compares the CTC, EC, electric delivery cost (EDC), IC, RC, PC, TOC, NEV, number of ETs (NET), NCS, and NSCS between the initial and optimized forms of the MDEVRPTW-DD.

Table 1.
Comparison before and after MDEVRPTW-DD optimization.
In Table 1, the optimization of the MDEVRPTW-DD results in significant reductions in the NEV, RC, and PC. The NEV is reduced from eleven to five, leading to a 54.5% decrease in the RC, from USD 550 to USD 250. Additionally, the NCS is reduced from seven to five, with three CSs now shared among the depots. This sharing arrangement aids in eliminating violations of customer time windows. Although the CTC and IC increase, from USD 0 to USD 160 and USD 0 to USD 110, respectively, the TOC still decreases from USD 2060 to USD 1888. These results indicate that optimizing the MDEVRPTW-DD enhances resource utilization and reduces logistics operation costs.
4. Related Definitions and Model Formulation
4.1. Solution Methodology
In this section, a bi-objective optimization model is developed for CDDs and CSDs, while considering the EC constraints of both vehicles and trucks. The relevant parameters and variables are defined in Table 2. Additionally, several reasonable assumptions, based on existing studies [3,4,12], are outlined as follows:
Table 2.
Notations and definitions in the MDEVRPTW-DD model.
Assumption 1.
There are two types of customers: CSDs and CDDs. The pertinent information for CSDs, including locations, time windows, and demands, is known prior to the initiation of services. In contrast, information regarding CDDs becomes accessible only after the route planning of CSDs is complete.
Assumption 2.
EVs depart from depots or CSs with fully charged batteries and can recharge at any power level at a constant charging rate. After serving customers, EVs are permitted to return to any depot.
Assumption 3.
The energy consumption of electric vehicles is solely dependent on the duration of travel, without accounting for the impact of factors such as traffic congestion, vehicle aging, and other real-world conditions.
Assumption 4.
This study considers only the insertion of dynamic customer demands, excluding more complex scenarios such as demand fluctuations and cancellations.
Assumption 5.
This study focuses solely on the delivery of a single type of cargo, while future research will explore the vehicle routing problem involving the mixed loading of multiple types of cargo.
4.2. Model Formulation
To simplify the calculation of energy consumption, some studies assume that the energy consumption of vehicles is linearly related to travel distance [32,33]. However, energy consumption is also influenced by various factors, including the weight and speed of the vehicles [11,34]. Thus, the energy consumption of electric vehicle v from nodes i to j during the wth service period is expressed by Equation (1).
where is the arc-specific coefficient of EV, represents the total weight of the EV from node i to node j, and is the vehicle-specific coefficient. Similarly, the energy consumption of the ET is shown in Equation (4).
where is the arc-specific coefficient of the ET, indicates the total weight of the ET from depot k to depot k′, and is the truck-specific coefficient.
Based on the aforementioned calculation methods for electric vehicles and trucks, a bi-objective optimization model is proposed to address the MDEVRPTW-DD, aiming to minimize the TOC and the NEV. The objective functions are formulated in Equations (5) and (6). Z1 represents the minimization of the TOC, which consists of four components: F1, F2, F3, and F4. Z2 aims to minimize the NEV.
F1 expresses the electricity consumption cost and rental cost of the centralized transportation by ETs, is the cost of electricity consumption, and is the rental cost of ETs.
F2 indicates the electricity consumption cost during the distribution process of EVs and the rental cost of EVs. is the electricity consumption cost of EVs, and is the rental cost of EVs.
F3 represents the fixed cost of the depots, the operating cost of the charging station, and the IC of the CDDs. is the fixed cost of the depots. is the operating cost of the charging station. represents the IC of the CDDs.
F4 denotes the PC of EVs, where is the PC associated with early arrivals to customers and is the PC of late arrivals to customers.
Constraints of initial routing optimization for electric vehicles:
Constraint (11) ensures that each CSD is visited exactly once. Constraint (12) enforces flow conservation. Constraints (13) and (14) stipulate that both the departure and arrival times of the EV from the depot must fall within the depot’s designated time window. Constraint (15) limits the cargo load of the EV to not exceed its capacity. Constraint (16) ensures that the EV’s cargo load matches the total quantity of demands from the served customers. Constraint (17) prevents the formation of subtours in the distribution routes. Constraint (18) allows EVs to return to any depot after serving the CSDs. Constraint (19) states that the NEVs departing from the depot and returning must be less than or equal to the NEVs initially departing. Constraints (20) and (21) indicate time continuity. Constraint (22) represents the relationship of the EC. Constraint (23) ensures that the battery level of the EVs remains stable upon arriving at and departing from the same CSD. Constraint (24) defines the charging time of the EVs at the charging station. Constraint (25) specifies that the EV departs from the depot and charging station with a full charge. Constraint (26) denotes that the EV has sufficient electricity to travel to the next node. Constraint (27) denotes that the waiting time for vehicle v at charging station r must not exceed the maximum acceptable queuing time. Constraint (28) denotes that the NEVs charging simultaneously at charging station r must not exceed the maximum charging capacity of the station. Furthermore, when multiple types of cargos are investigated, constraints (15) and (16) will no longer be applicable, and they may be necessary to be devised to consider the quantity and volume of different cargo types.
Constraints of initial routing optimization for electric vehicles:
Constraint (29) ensures that each dynamic customer is served precisely once. Constraint (30) enforces the conservation of EV flow. Constraint (31) permits EVs to return to any depot after servicing customers. Constraint (32) stipulates that the NEVs returning to the depot cannot exceed the NEVs departing from it. Constraint (33) guarantees that the remaining capacity of the EV is adequate to satisfy the demands of dynamic customers. Constraints (34) and (35) define the arrival time to dynamic customer j as the departure time from node i plus the travel time from node i to dynamic customer j. Constraint (36) ensures that the EV’s battery level remains stable upon arriving to and departing from the same CDD. Constraint (37) articulates the relationship of the EC. Constraint (38) ensures that the EV possesses sufficient electricity to travel to the CDDs.
Constraints of centralized transportation for ETs:
Constraints (39) and (40) ensure that the departure and arrival times of the ETs align with the time windows of the depot. Constraint (41) guarantees that the cargo loads of the ETs do not exceed their capacity. Constraint (42) indicates that the quantity of cargo transported equals the total demand of the reassigned customers. Constraints (43) and (44) state that the departure time of the ET from the depot, plus the travel time, equals the arrival time at the next depot.
Binary decision variables:
Constraints (45)–(51) are binary decision variables.
5. Solution Methodology
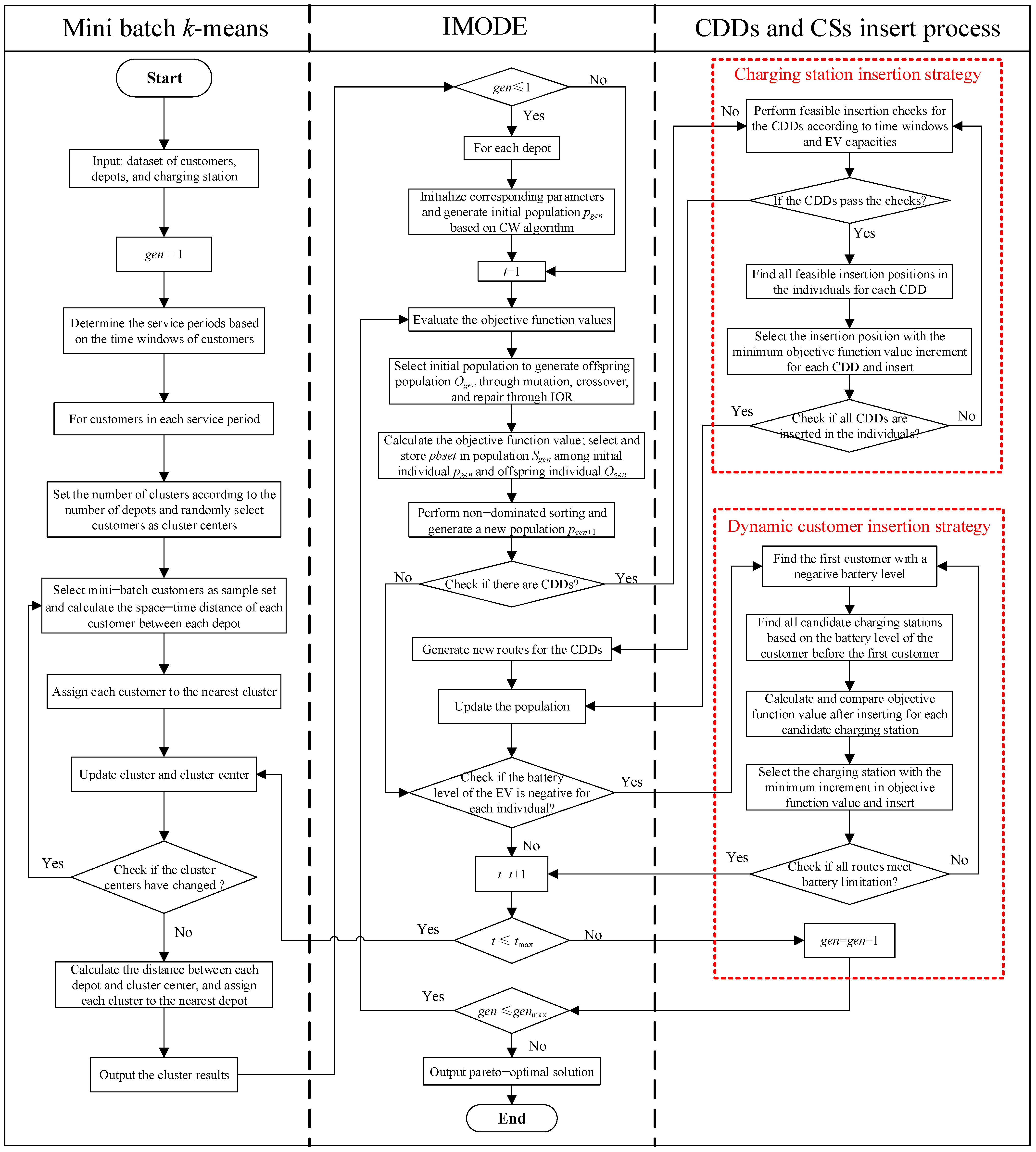
In large-scale delivery networks, the number of customers frequently exceeds the problem size that can be efficiently addressed by exact algorithms. However, heuristic algorithms can offer a more practical solution by rapidly identifying near-optimal outcomes [35,36]. Differential evolution has gained wide adoption due to its robust optimization capabilities [31,37]. Therefore, a hybrid heuristic algorithm is proposed to tackle the MDEVRPTW-DD by integrating the mini-batch k-means clustering algorithm with the IMODE algorithm. The incorporation of genetic operations, CS insertion, CDD insertion, and non-dominated sorting operations enhance solution efficiency. The procedure of the algorithm is illustrated in Figure 2.
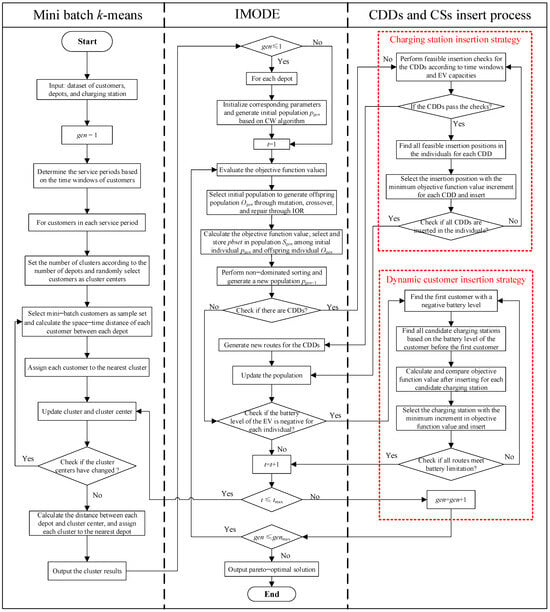
Figure 2.
Hybrid algorithm flow chart for MDEVRPTW-DD optimization.
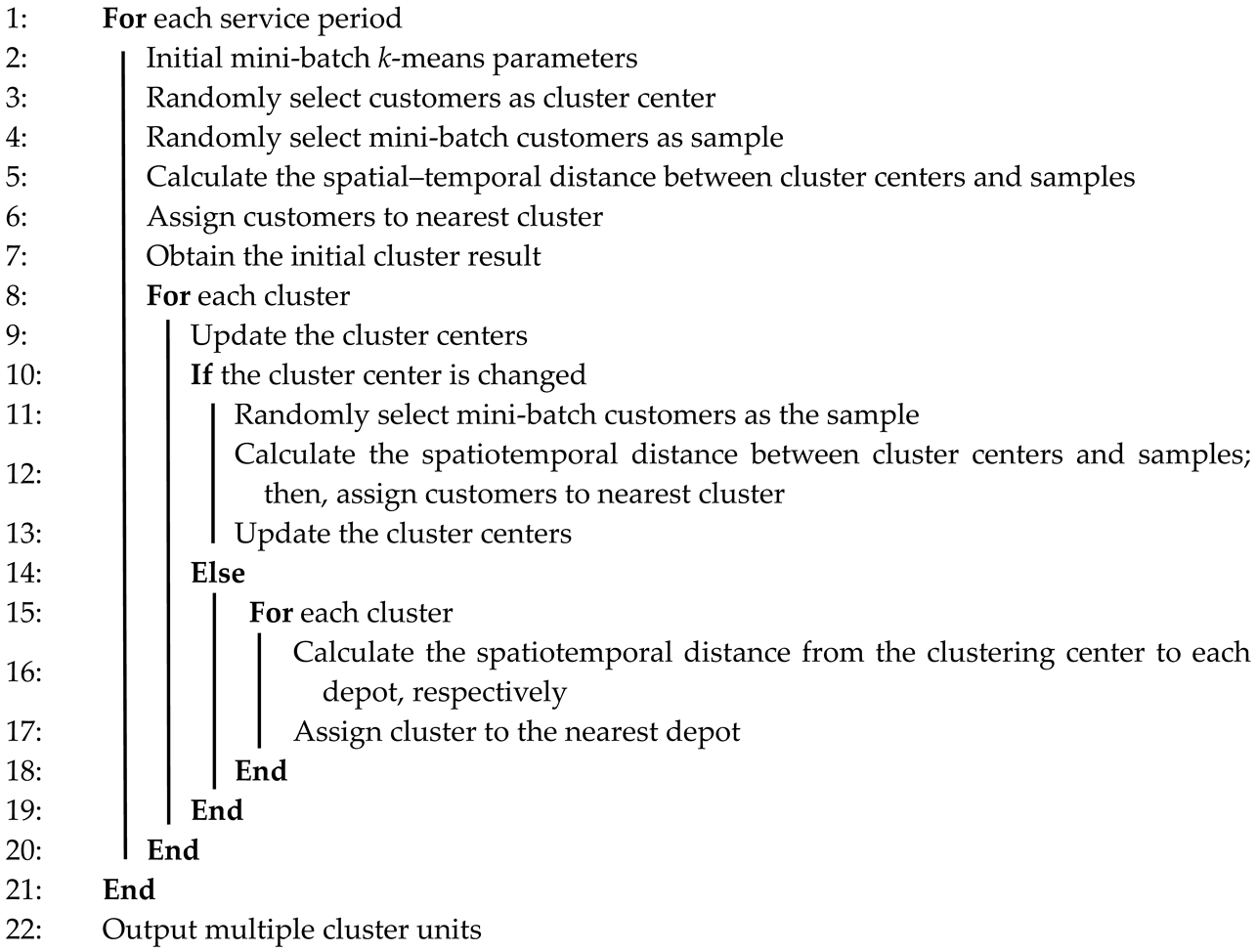
5.1. Mini-Batch k-Means Clustering
Customer clustering methods are utilized to simplify the complexity of large-scale vehicle distribution networks [38]. As a variant of the k-means algorithm, the mini-batch k-means variant enhances efficiency by processing data in fixed-size batch sizes [39,40]. The mini-batch k-means algorithm assigns customers by calculating the spatiotemporal distance between the customer and the cluster center, which can be computed using Equation (52):
where (xi, yi) and (xj, yj) are the geographical location of customer Ci and cluster center j, respectively. (ti, Ti) and (tj, Tj) represent the time windows of customer Ci and cluster center j, respectively. In addition, μ and (1-μ) express the coefficients of spatial and temporal distances, respectively.
Clustering is performed by grouping customers with geographically proximate locations and similar time windows, based on the spatiotemporal distance defined by Equation (52). This clustering approach not only enhances delivery efficiency but also mitigates computational and scheduling complexities, thereby optimizing the overall delivery process. By incorporating clustering algorithms into the IMODE framework, a more effective initial solution can be obtained, facilitating the faster and more efficient identification of Pareto-optimal solutions.
As the number of product types increases, the original clustering algorithm can be extended to accommodate more features. Specifically, the characteristics of product types (such as weight, volume, etc.) can be incorporated into the clustering algorithm, along with factors like time windows and geographical locations, creating a multidimensional feature space. Additionally, weighted clustering methods can be employed to assign different weights to features based on their importance, ensuring that key features have a greater impact on the clustering results and enabling the algorithm to handle the complexity of multiple product types effectively. The mini-batch k-means algorithm procedure is shown in Algorithm 1.
| Algorithm 1: mini-batch k-means |
| Input: time windows and geographical locations of customers and depots, and the number of clustering units k Output: multiple clustering units |
 |
5.2. Improved Multi-Objective Differential Evolution
Differential evolution serves as an effective method for addressing multi-objective optimization challenges [26,41]. It derives the final solution through a sequence of genetic operations, including mutation, crossover, and selection. However, traditional differential evolution encounters difficulties with problems like an MDEVRPTW-DD when parameters such as the mutation scale factor F are integers. When F > 1, the computation time escalates, while a value of F = 1 may result in local optima [25,27,31]. Therefore, the IMODE algorithm is proposed to tackle an MDEVRPTW-DD. The comprehensive process of the IMODE algorithm is described in Algorithm 2.
| Algorithm 2: IMODA algorithm |
| Input: parameters of algorithm (e.g., population size, maximum iterations, crossover probability, mutation probability); parameters of model; clustering results Output: optimal solution |
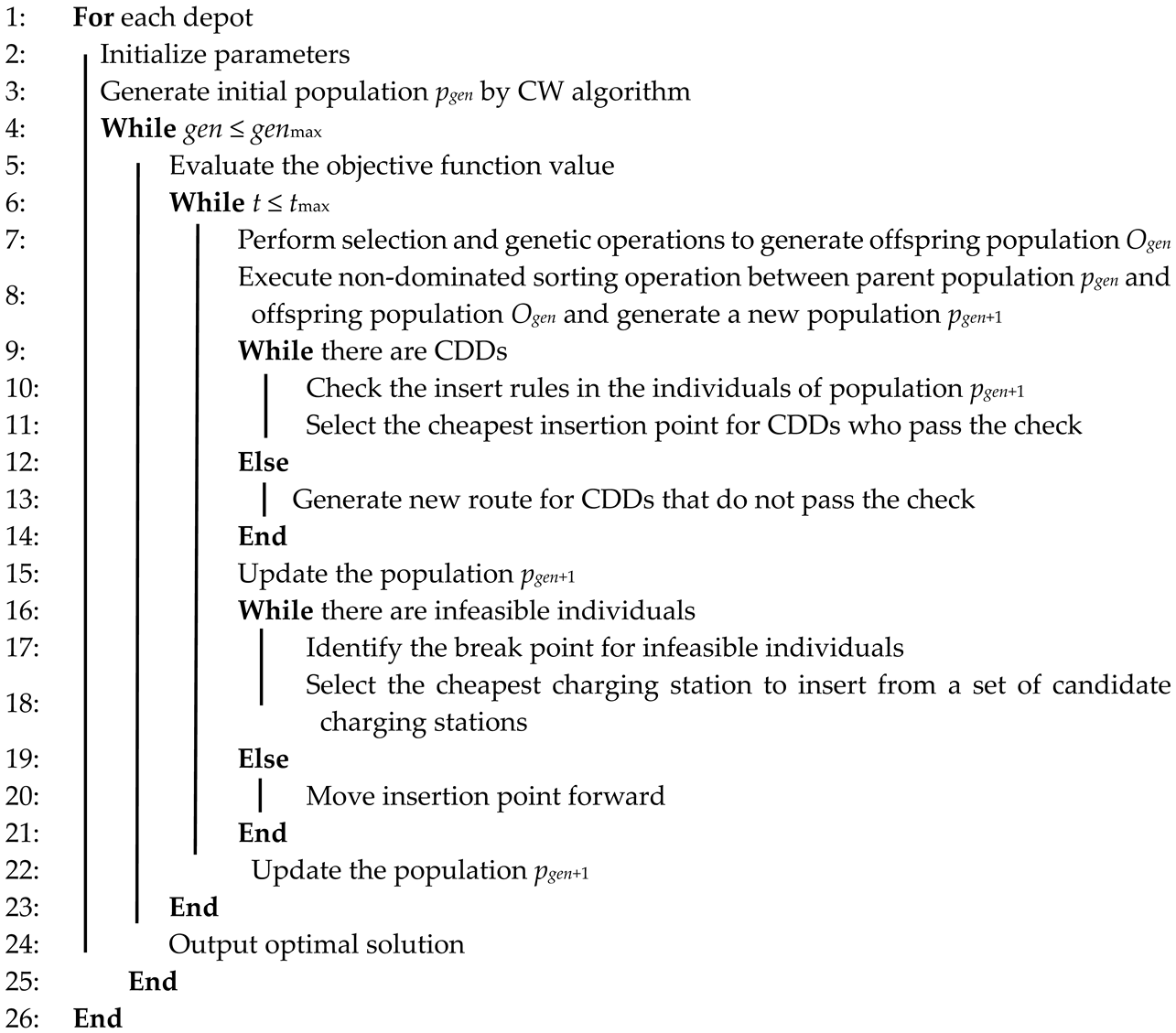 |
5.2.1. Initiation Population
In this study, an ordinal number encoding method is employed to represent the solution. A chromosome consists of a sequence of n customers, with each gene representing an individual a customer. The population size is denoted as NP, and each individual is represented as an n-dimensional vector. To improve the solution quality, the Clarke Wright (CW) algorithm is applied to generate the initial solution [42,43]. The EV capacity is assessed beginning with the first gene of the chromosome. If the capacity constraint is breached at any gene, a new EV is dispatched from that point onward. This procedure continues until all customers are served.
5.2.2. Genetic Operation
In the IMODE algorithm, genetic operations such as mutation, crossover, and selection are crucial in determining the search process’s efficiency and the quality of the results. The mutation operation introduces new search directions through differential vectors, the crossover operation combines individual features to generate new solutions, and the selection operation ensures that the best individuals are passed to the next generation. Through the interplay of these operations, the IMODE algorithm effectively explores the solution space and progressively converges to the optimal solution.
- (1)
- Mutation operation
The mutation operation in the IMODE algorithm entails selecting three vectors from the parent population. The weighted difference between two vectors is added to a third vector to create an offspring vector [44]. The offspring vector is formulated using Equation (53).
where Xr1, Xr2, and Xr3 are three parent vectors randomly selected from current generation G; r1, r2 and r3 belong to [1, NP]; and Vi is the mutant vector. The mutation scale factor F, a constant within the range [0, 1], controls the amplification of the differential variation (Xr1-Xr2). During mutation, some genes in the offspring may exceed the allowed range. For instance, a chromosome such as [5.2, −7, 1.3, 2.5, 4.1, 6.7, −3.8], which represents seven customers, might contain invalid values. To address this, we apply the integer order criterion (IOR) operator to correct the offspring chromosomes [45].
- (2)
- Crossover operation
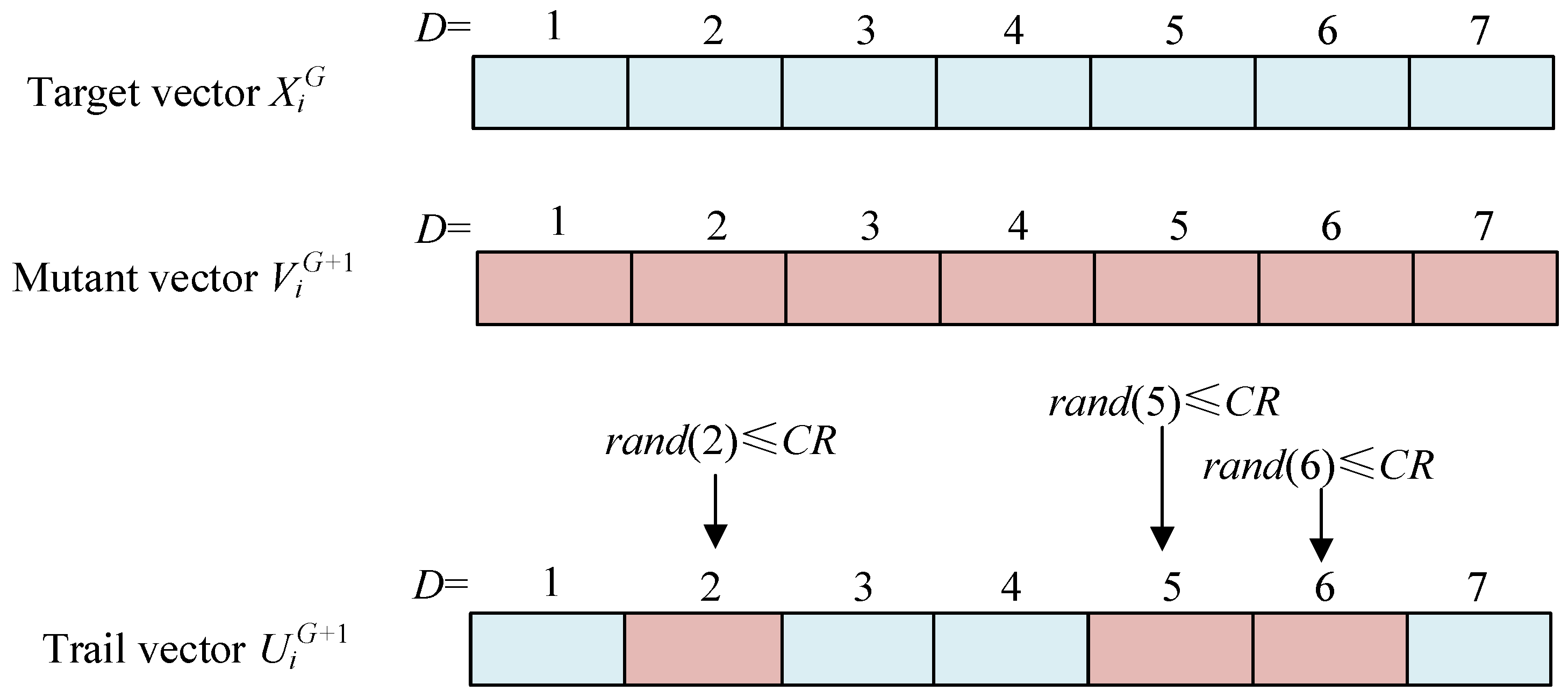
To enhance solution diversity, a crossover operation is performed after the mutation operation [46]. Each vector has j parameters, where j ∈ [1, D], and D is the solution dimension. A random number rand(j) is generated within the range [0, 1] and compared to the crossover probability CR. If rand(j) ≤ CR or j = rand(i), the jth parameter of trial vector Ui is replaced by the jth parameter of mutant vector Vi. Otherwise, the jth parameter of Ui is replaced by that of the target vector Xi. Trial vector U is generated by a crossover operation as follows:
where i is within interval [1, NP], and rand(i) is a random integer between [1, D]. Figure 3 shows an illustration of the crossover operation.
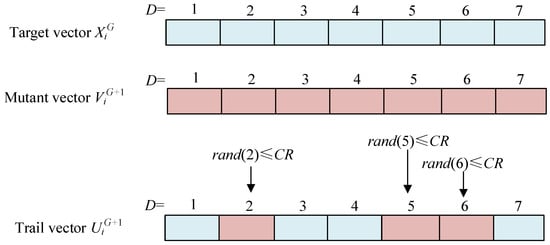
Figure 3.
Example of crossover operation.
- (3)
- Selection operation
To maintain a constant population size, the best individuals are selected from both the parent and offspring populations [47]. Calculate and compare the objective function values of the parent population f(p) and the offspring population f(o). If f(o) is lower than f(p), the parent is replaced. Otherwise, the parent is retained. The selection rule is as follows:
5.2.3. Dynamic Customer Insertion Strategy
In this section, we propose a dynamic customer insertion strategy, wherein dynamic customers are incorporated into the initial routes using a greedy algorithm [48,49]. Dynamic customers may be inserted into these routes provided that the time window and EV capacity constraints are not violated [50]. Therefore, each dynamic customer presents multiple potential insertion routes. Thus, it is crucial to identify both the optimal insertion route and the corresponding insertion point.
Initially, the capacity of the EVs in the existing routes is evaluated using constraint (54) to identify routes capable of accommodating the CDDs. If any routes meet the requirements of constraint (54), a subsequent check for time windows is conducted. If no applicable routes are available, a new EV is dispatched to serve the CDDs.
Next, the customer’s time window is examined for the routes. Constraints (57) and (58) ensure that the EV arrives to CDD c within the specified time window. Should no feasible insertion point be identified for the CDD, a new EV that complies with constraint (59) is designated to serve the CDD. Following this, the IMODE algorithm is utilized to optimize the new routes. The CDD is inserted at viable points, the resulting operating costs are calculated, and the insertion point that minimizes the cost increment is selected. This process is detailed in Algorithm 3. A dynamic insertion process is depicted in Figure 4.
| Algorithm 3: CDD insertion operation |
| Input: population pgen+1 containing all CSDs, and information on the time windows and geographic locations of CDDs. Output: updated pgen+1 containing CSDs and CDDs |
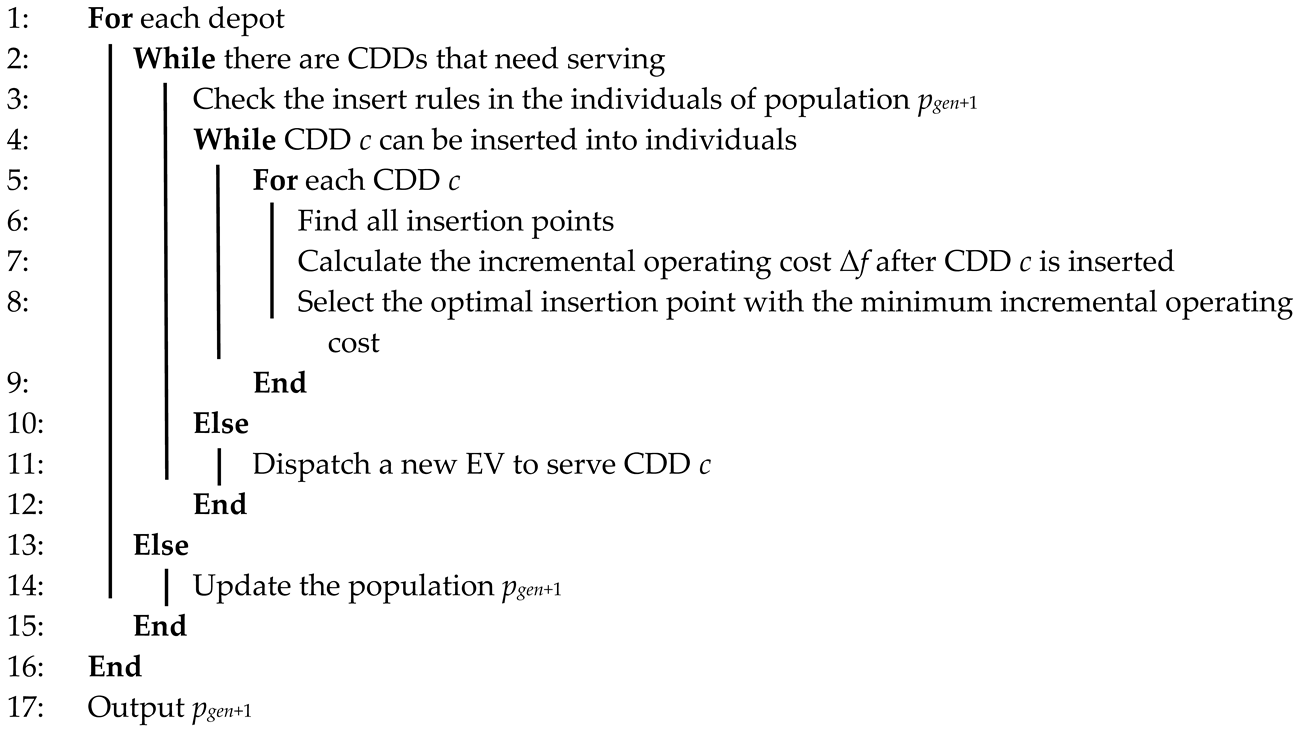 |
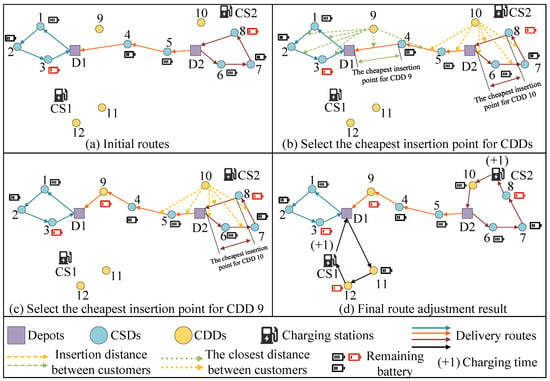
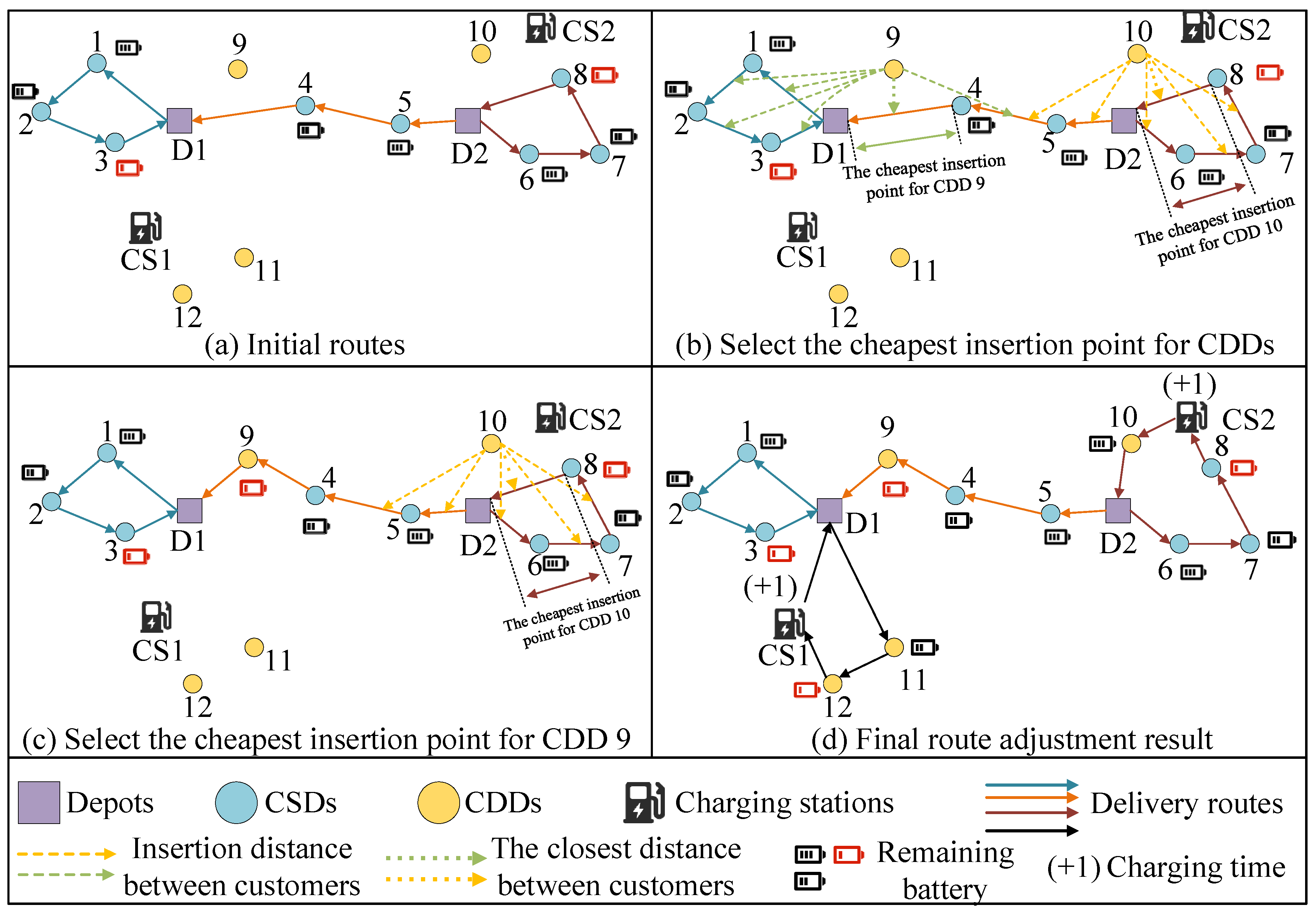
Figure 4.
Illustration of CDD insertion process.
In Figure 4a, the network starts with three initial routes comprising solely CSDs, each of which has adequate capacity to meet the demand of the CDDs. The first step is identifying the feasible insertion points for each CDD that comply with constraints (53) and (54). In Figure 4b, CDDs 9 and 10 each have six viable insertion points, while CDDs 11 and 12 lack any feasible insertion points. Subsequently, for CDDs 9 and 10, the optimal insertion points are chosen to minimize the increment in operating costs. The first CDD to be inserted is determined using the maximum minimum regret value method. Accordingly, as illustrated in Figure 4c, CDD 9 is selected as the first customer to be integrated into the route. Finally, a new EV is dispatched to serve CDDs 11 and 12. As shown in Figure 4d, the network now comprises four routes: two that are mixed routes containing both CDDs and CSDs, one exclusively for CSDs, and one dedicated solely to serving CDDs 11 and 12. Moreover, the dynamic customer insertion strategy efficiently incorporates dynamic customers into existing routes while ensuring adherence to the capacity and time window constraints and minimizing operational costs. This approach provides a scalable and effective solution for dynamic customer integration in electric vehicle routing.
5.2.4. Charging Station Insertion Strategy
Due to the limited battery capacity of EVs, their driving range is restricted, which may render certain delivery solutions impractical [12,51]. Therefore, for routes deemed infeasible, CSs must be strategically positioned along the route. In this study, the first customer that an EV cannot reach due to energy constraints is defined as the break point of a route [52]. Figure 5 illustrates the charging station insertion process, which includes one depot, six CSDs, one CDD, and three CSs.
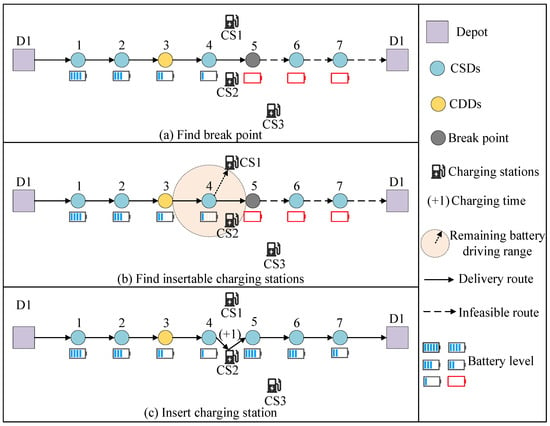
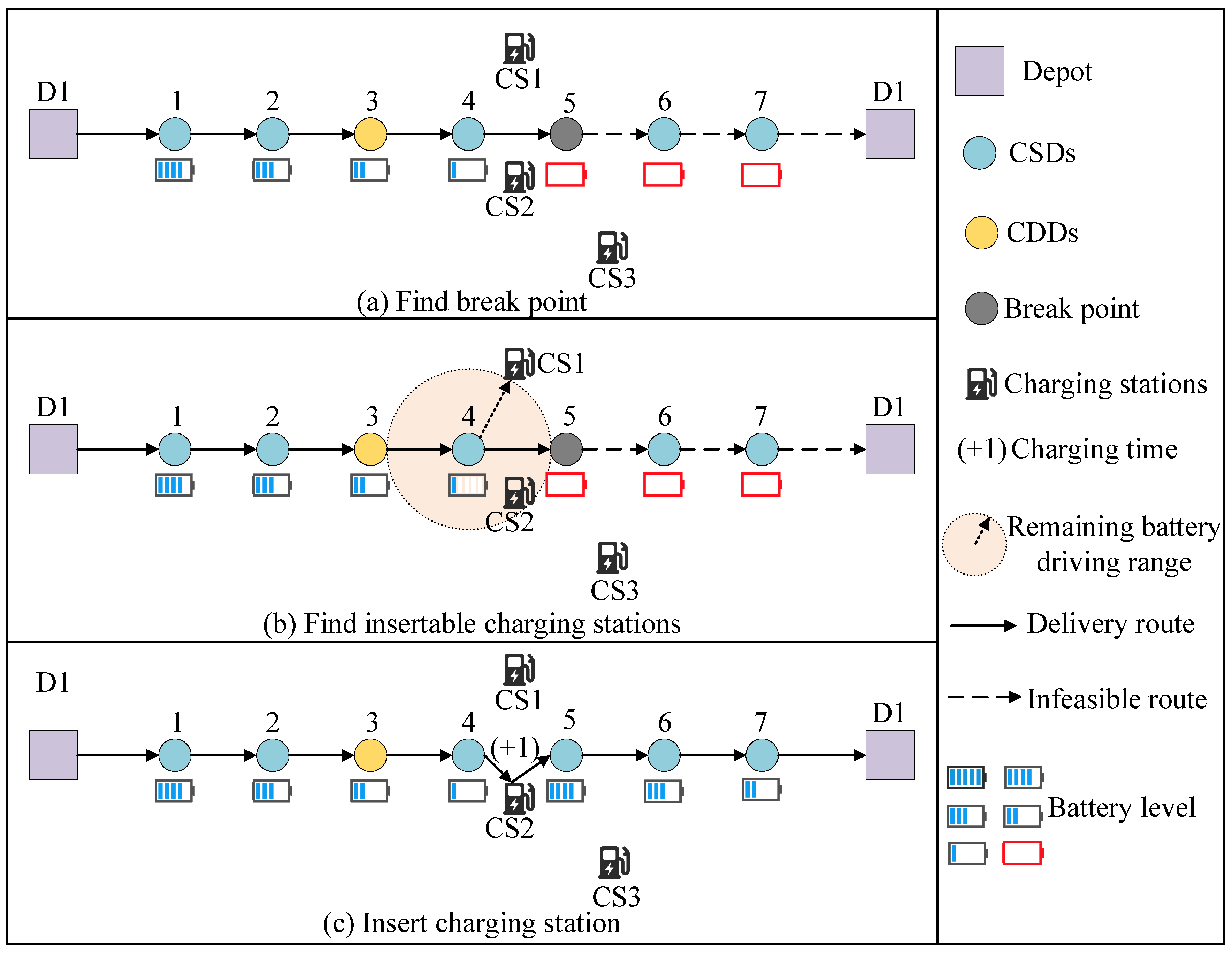
Figure 5.
Charging station insertion diagram.
The charging station insertion process can be summarized as follows: First, identify the break point based on the EV’s battery capacity. In Figure 5a, an infeasible route is depicted, with the break point located at customer 5. Second, the remaining battery after servicing the customer just before the break point is utilized to identify available CSs. In Figure 5b, three charging stations are considered, but only stations 1 and 2 can be inserted based on the remaining battery. Finally, the charging station that minimizes the incremental cost is selected. In Figure 5c, charging station 2 is chosen as it minimizes the cost, thereby making the route feasible. Additionally, when inserting a CS, it is essential to ensure that the EVs’ queueing time at the CS remains within acceptable limits, while also considering the station’s capacity constraints, as shown in constraints (27) and (28). This guarantees that the charging process does not excessively delay the route or introduce additional inefficiencies.
Moreover, the proposed charging station insertion strategy effectively addresses energy limitations by strategically positioning CSs along routes. This approach ensures the feasibility of EV routes while minimizing operational costs and adhering to both capacity and queueing time constraints, making it a practical solution for optimizing electric vehicle routing in real-world applications. The pseudocode for the charging station insertion strategy is outlined in Algorithm 4.
| Algorithm 4: the process of charging station insertion strategy |
| Input: population pgen+1, the geographic location of charging stations Output: updated pgen+1 |
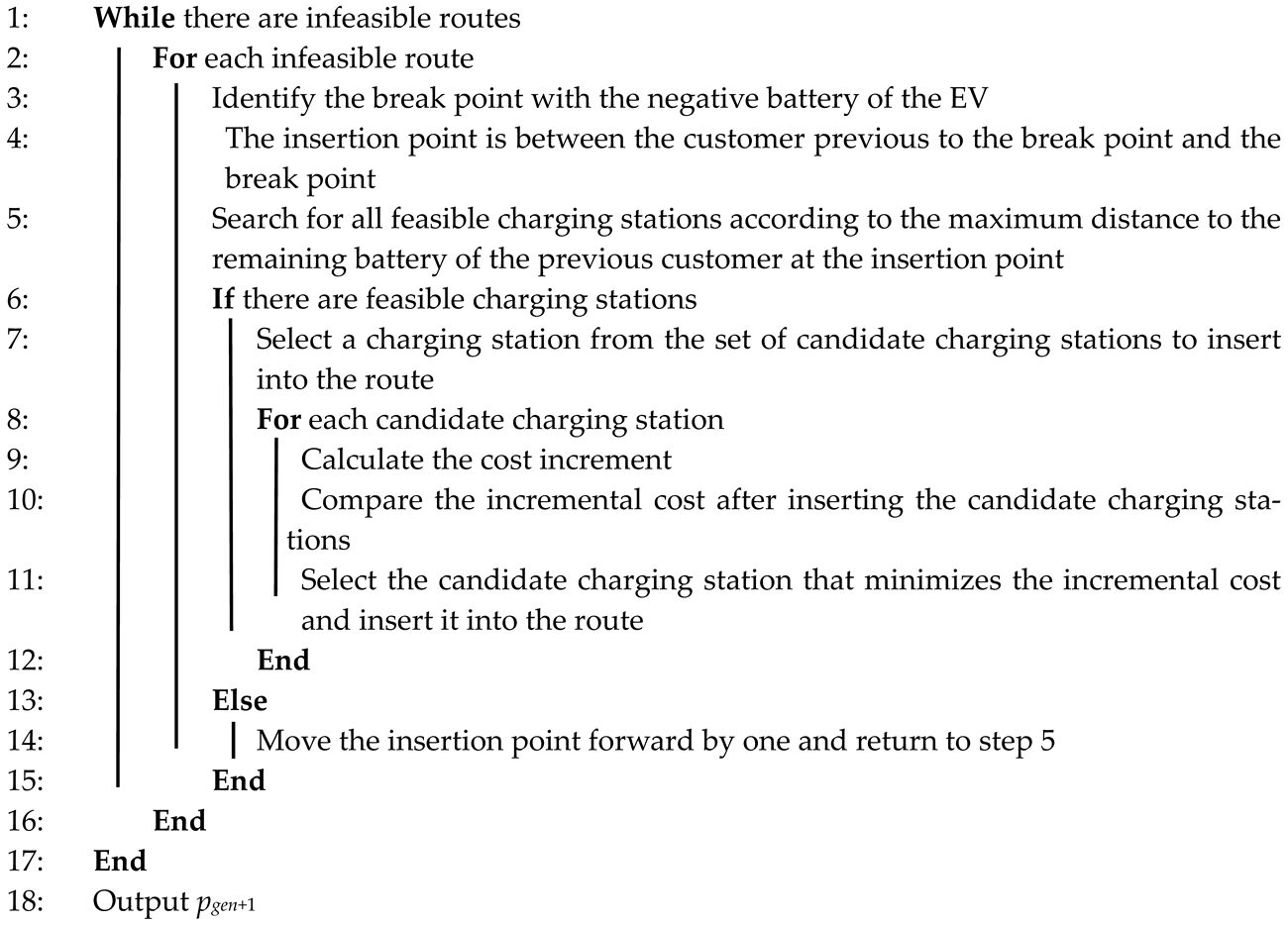 |
5.2.5. Non-Dominated Sorting Operation
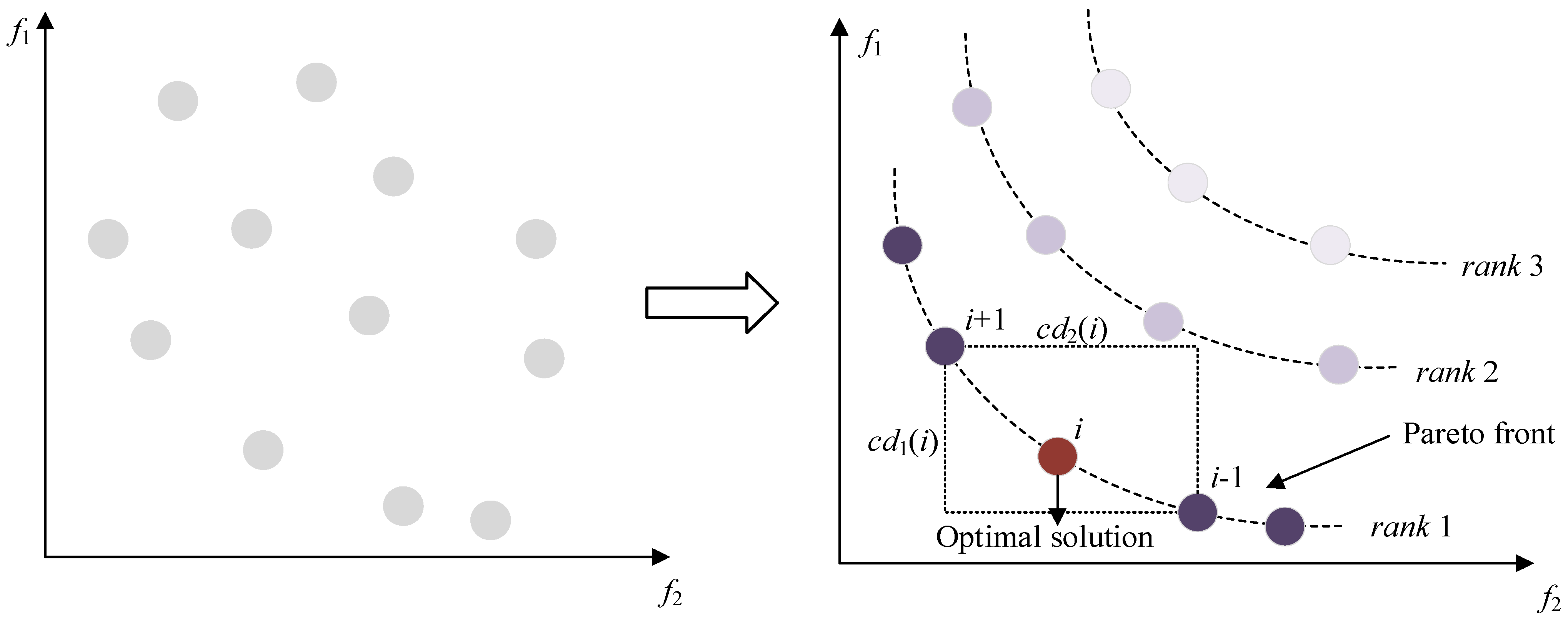
In this paper, solutions are ranked using non-dominated sorting to identify the Pareto-optimal solutions for the bi-objective optimization algorithm [42,53,54]. Individuals with a lower non-dominated rank are preferred during selection. In instances where two individuals share the same rank, the one with the greater crowding distance is selected. The process of obtaining the Pareto-optimal solution is illustrated in Figure 6.
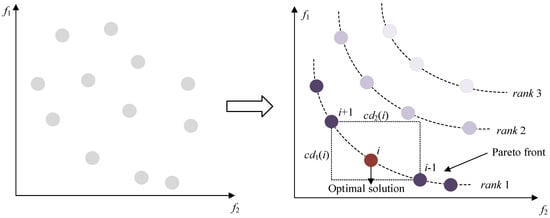
Figure 6.
The process of non-dominated sorting.
In Figure 6, the Pareto front is obtained by the non-dominated sorting of all the solutions. The optimal solution is then identified by calculating the crowding distance of solutions on the Pareto front. The crowding distance for individual i is computed using Equation (58).
where i − 1 and i + 1 represent two adjacent solutions on the same Pareto front, and fnmax and fnmin are the maximum and minimum function values of the objective function n, respectively.
Therefore, the non-dominated sorting operation rank solutions are based on their Pareto optimality, ensuring the selection of the best solutions. By calculating crowding distance, this maintains diversity and prevents premature convergence to suboptimal solutions. This balance between convergence and diversity is crucial for obtaining high-quality solutions in multi-objective optimization problems, thereby enhancing the robustness and effectiveness of the proposed IMODE algorithm.
6. Computational Experiments
6.1. Algorithm Comparison
In this section, the proposed IMODE algorithm is compared with the MOGA [55,56], MOPSO [57], the multi-objective evolutionary algorithm (MOEA) [58], multi-objective ant colony optimization (MOACO) [59], and a multi-objective tabu search (MOTS) [60] to evaluate the effectiveness of the IMODE algorithm. A total of 30 benchmark instances are created for the algorithm comparison, derived from the multi-depot vehicle routing problem with time windows (MDVRPTW) dataset from the NEO Research Group database (https://neo.lcc.uma.es/vrp/vrp-instances/multiple-depot-vrp-with-time-windows-instances/, accessed on 30 December 2024). In these instances, the charging station and CDD locations are randomly selected from customer locations. The benchmark instances 1–10 of MDVRPTW are expanded from 10 to 30 by varying the percentage of CDDs. Each dataset is labeled in the format “name-NCS-serial number,” and where the name denotes the benchmark instance, the NCS indicates the number of charging stations, and the serial number differentiates the datasets based on varying CDD ratios. Table 3 provides details of the modified dataset, including the number of depots, CSDs, CDDs, NCS, and vehicle capacity.
Table 3.
Characteristics of data instances.
The definitions and values of the relevant parameters for these algorithms, established based on existing studies [55,57,58], are presented in Table 4. The performance results of the six algorithms, including the TOC and NEV, are summarized in Table 5.
Table 4.
Definitions and values of the parameters for the five algorithms.
Table 5.
Comparison results of four algorithms.
Table 5 presents the results of the six algorithms, the IMODE algorithm, the MOGA, MOPSO, the MOEA, MOACO, and the MOTS, based on 30 benchmark instances, along with the corresponding t-test results and p-values. The analysis reveals a significant difference between the computational results of the IMODE algorithm and the other five algorithms. Specifically, the average TOC values are as follows: the IMODE algorithm at USD 4968, the MOGA at USD 5089, MOPSO at USD 5076, the MOEA at USD 5091, MOACO at USD 5154, and the MOTS at USD 5136, with the IMODE algorithm yielding the lowest average TOC. Additionally, the average NEV is 13 for the IMODE algorithm, compared to 14 for the MOGA, MOPSO, the MOEA and 17 for MOACO and the MOTS. This indicates that the IMODE algorithm utilizes one less EV than the other algorithms. Thus, the IMODE algorithm proposed in this paper demonstrates notable advantages in addressing the MDEVRPTW-DD.
6.2. Date Description and Related Parameter Setting
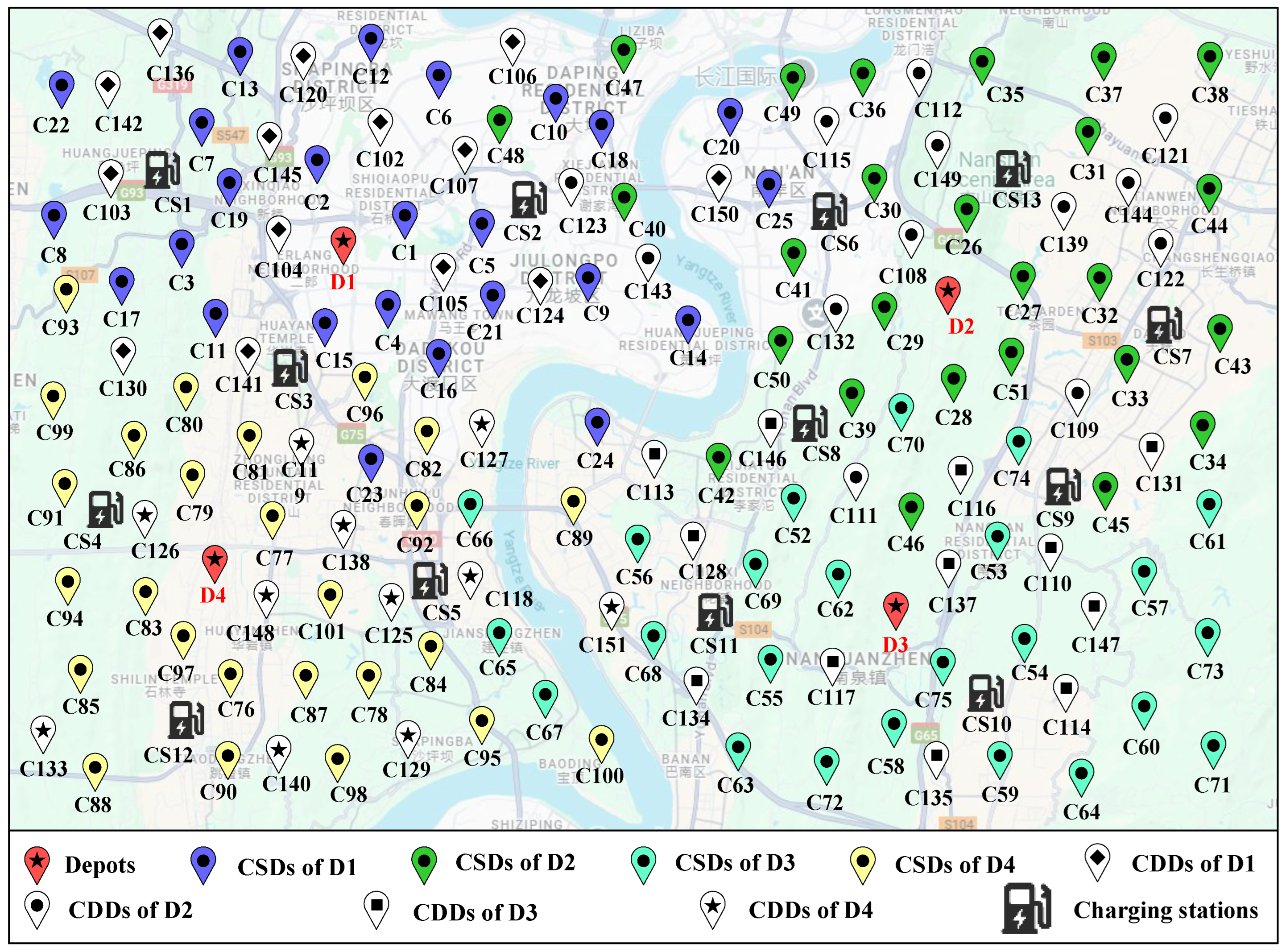
A real-world logistics distribution network in Chongqing City, China, is utilized to illustrate the significance and effectiveness of the proposed model and hybrid algorithm. The network consists of four depots (D1, D2, D3, and D4); 151 customers (C1, …, C151), which include 101 CSDs and 50 CDDs; as well as 13 CSs. The spatial distribution of depots, customers, and charging stations is depicted in Figure 7, while the affiliations of the logistics facilities in the initial distribution network are outlined in Table 6. The parameters for the model and algorithm are detailed in Table 7, informed by the relevant literature and practical considerations [4,12,43]. Investigations show that the key parameters significantly affect the performance of the IMODE algorithm [27,31]. The optimal values for the crossover probability pc, selection probability ps, mutation probability pm, average total operating cost (ATOC), and standard deviation (SD) are determined by running the algorithm 20 times with different parameters. The results are shown in Table 8.
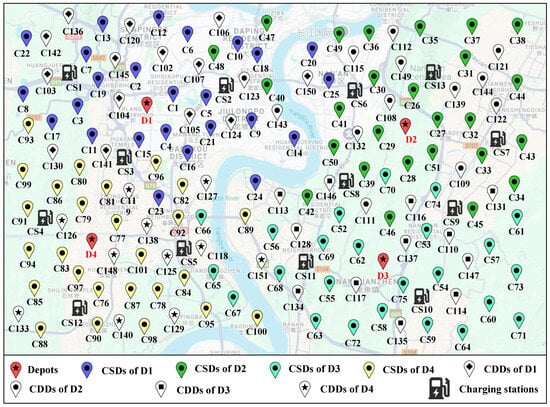
Figure 7.
Spatial distribution of the logistics facilities and customers.
Table 6.
Affiliation of logistics facilities in the initial distribution network.
Table 7.
Parameter settings.
Table 8.
Computation result comparison among different parameters.
In Table 5, the ATOC and SD are evaluated across 20 scenarios with varying values of pc and w. Notably, when both the ATOC and SD are minimized, the results indicate that the algorithm demonstrates high efficiency and stability under this set of parameters. Specifically, adjusting pc results in the lowest ATOC of 10,120 when pc = 0.8, with these values offering better efficiency compared to other settings. Furthermore, the minimum SD value of 2 occurs at pc = 0.8, suggesting that the solution is more stable. Finally, adjusting ps to 0.7 and pm to 0.15 yields the lowest ATOC and SD.
6.3. Optimization Results
6.3.1. Clustering Results
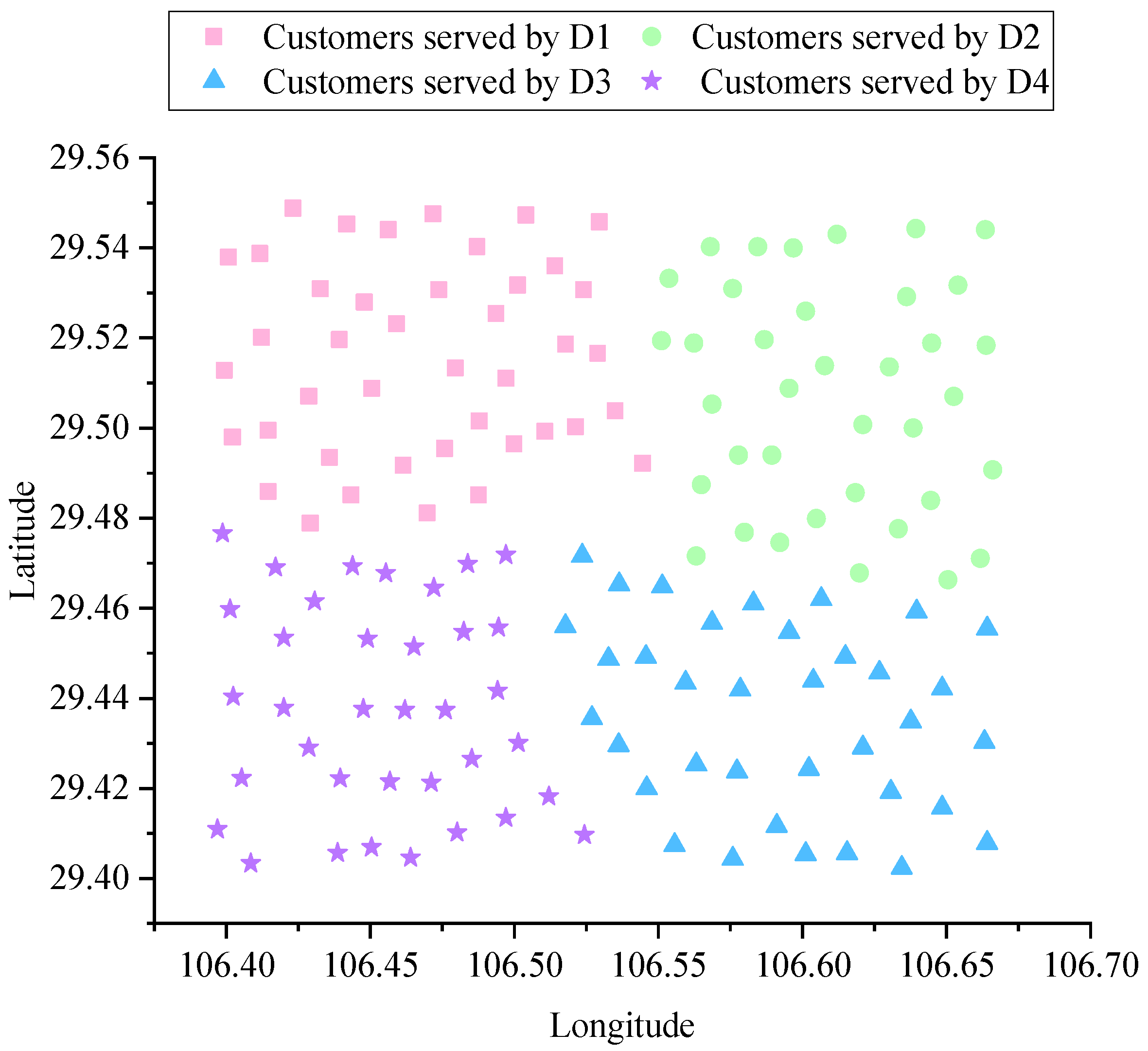
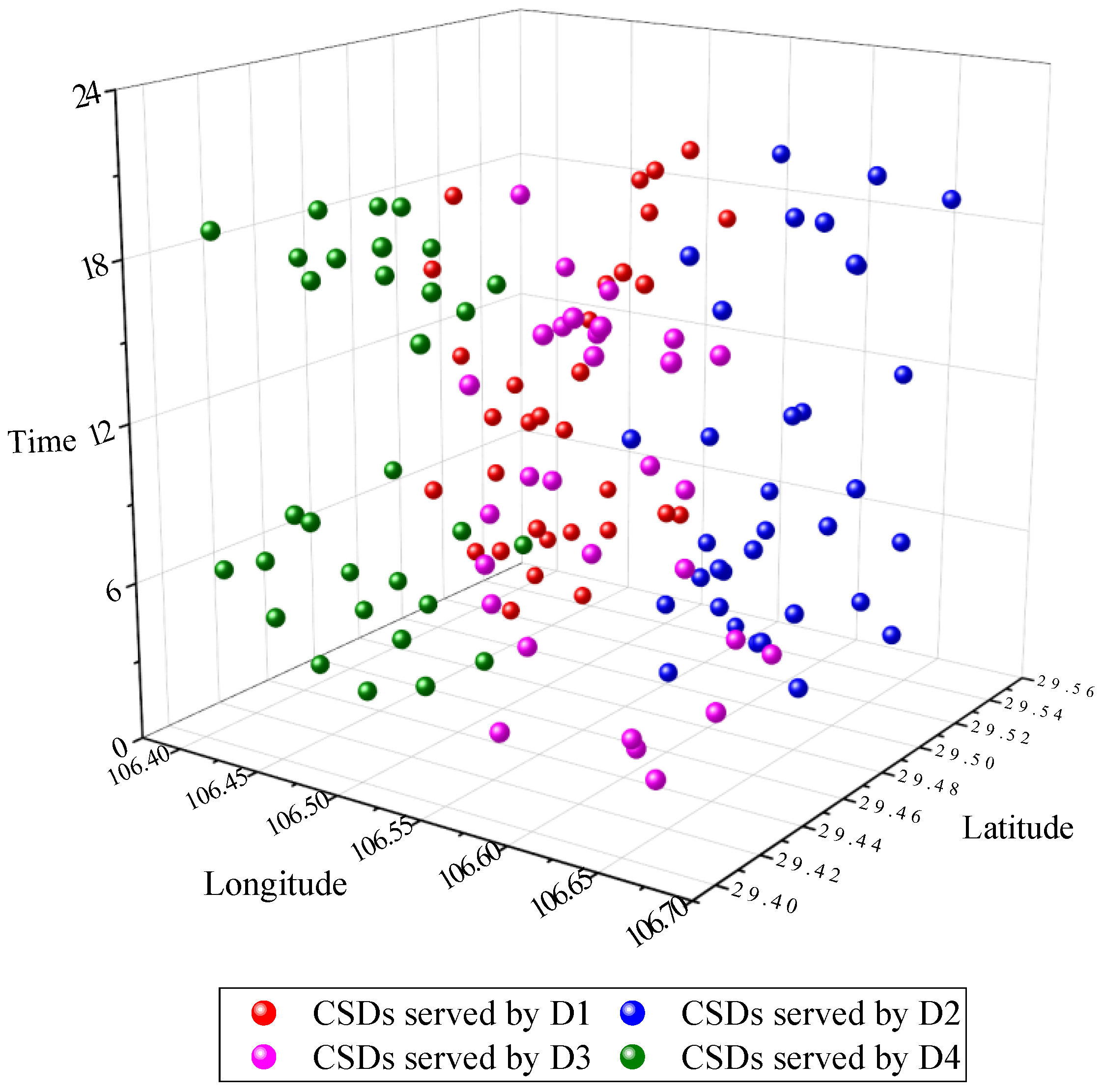
To reduce the computational complexity of the MDEVRPTW-DD, the mini-batch k-means algorithm is employed to streamline the problem. This approach clusters customers based on their time windows and geographical locations, after which customers are reassigned to the nearest depot. The clustering results for all customers are illustrated in Figure 8, while the results for the CSDs and CDDs are shown in Figure 9 and Figure 10, respectively.
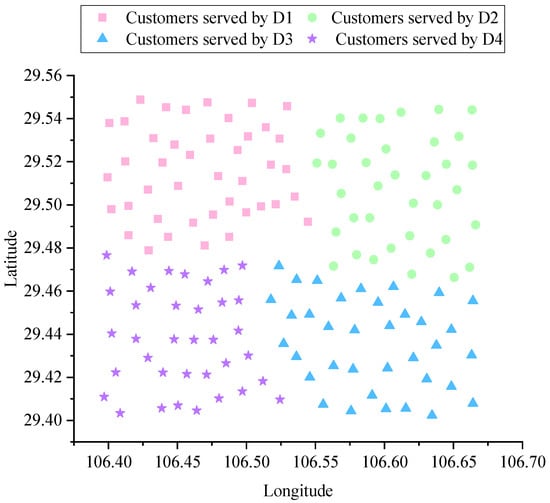
Figure 8.
The clustering results of all customers.
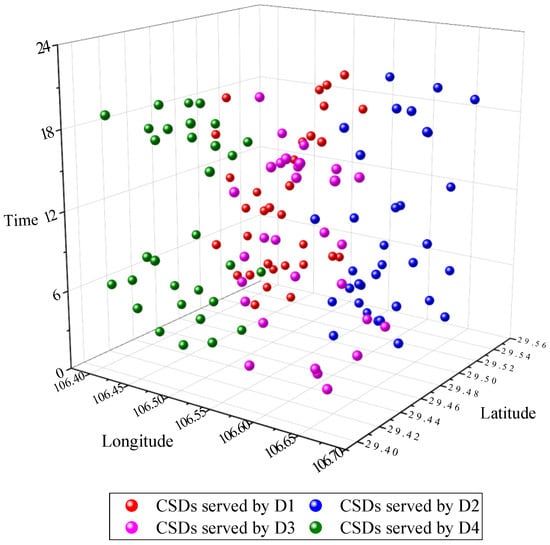
Figure 9.
The clustering results of CSDs.
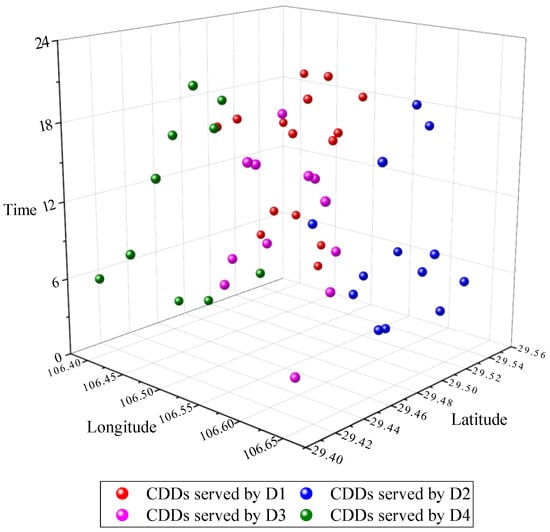
Figure 10.
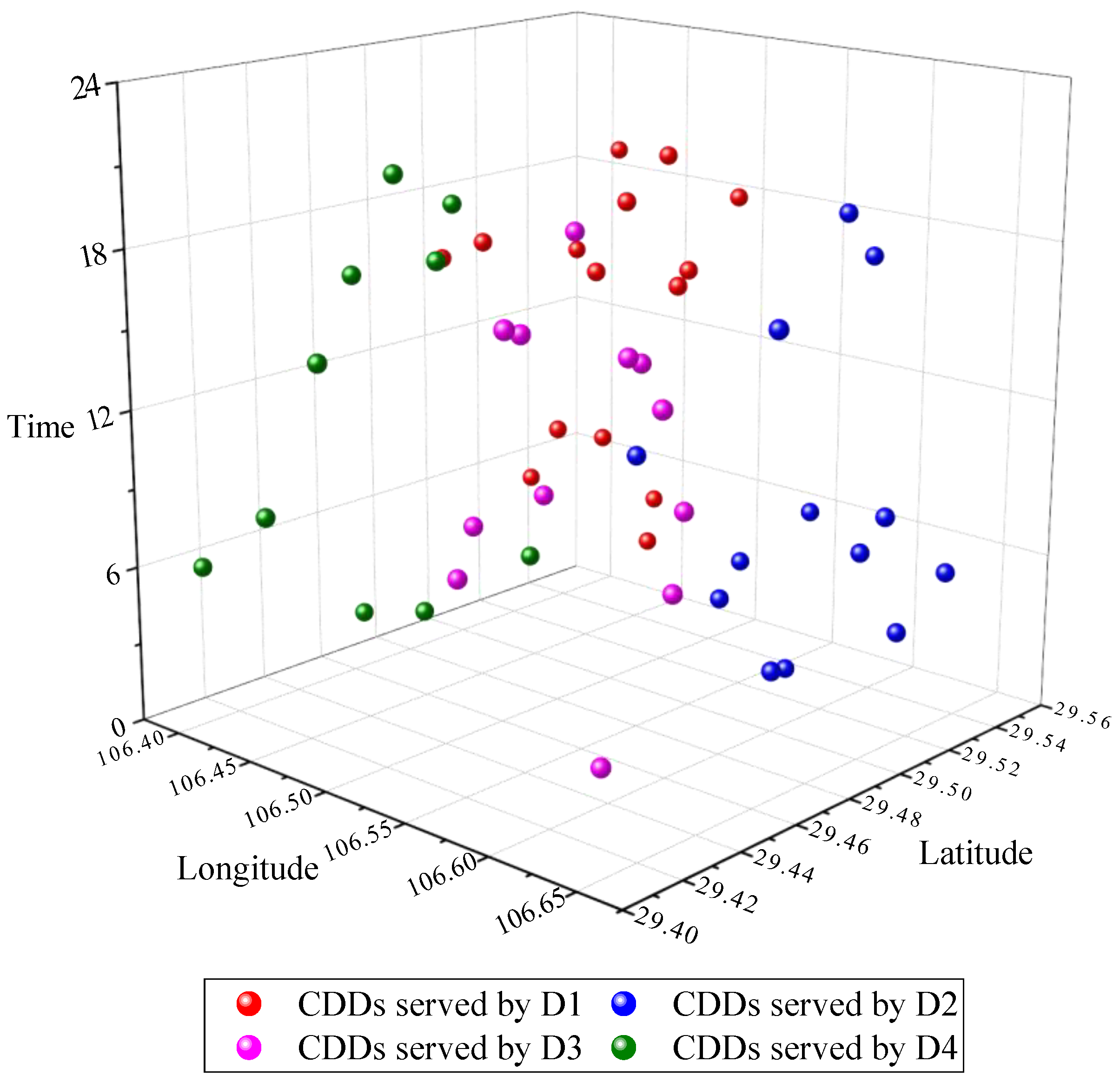
The clustering results of CDDs.
In Figure 8, a total of 151 customers are allocated as follows: 42 customers are assigned to D1, 37 to D2, 36 to D3, and 36 to D4. Following the clustering process, customers are more evenly distributed around the depots, which reduces long-distance deliveries and lowers the overall delivery cost. Furthermore, the affiliations of the customers have shifted, as indicated in the results presented in Table 9. In Table 9, a total of nineteen customers have altered their affiliations, including four customers from D1, six from D2, five from D3, and four from D4.
Table 9.
The changes in the affiliation for customers.
6.3.2. Electric Vehicle Routing Optimization with Resource Sharing and Insertion Strategy
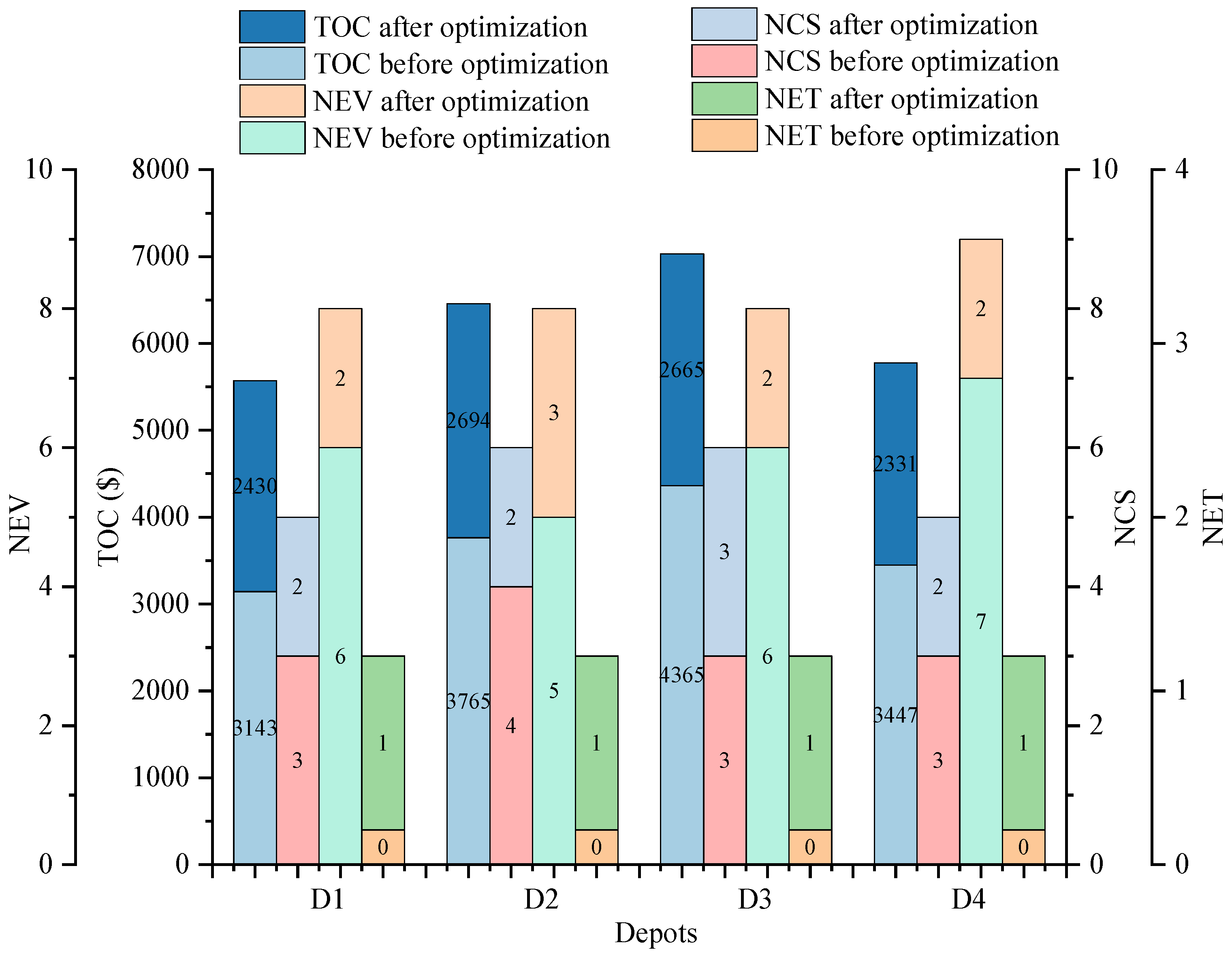
An enhanced differential evolution algorithm, informed by mini-batch k-means clustering, is employed to address the MDEVRPTW-DD. Additionally, a resource-sharing strategy and a dynamic customer insertion strategy are implemented to decrease the NEV and NCS, improve resource utilization, and reduce logistics operating costs. The specific optimization results for each depot are detailed in Table 10, which includes the FOC, CTC, EDC, PC, IC, RC, TOC, NCS, NEV, and NET. Furthermore, Figure 11 illustrates a comparison of the TOC, NCS, NEV, and NET for each depot before and after optimization.
Table 10.
Optimal results of MDEVRPTW-DD.
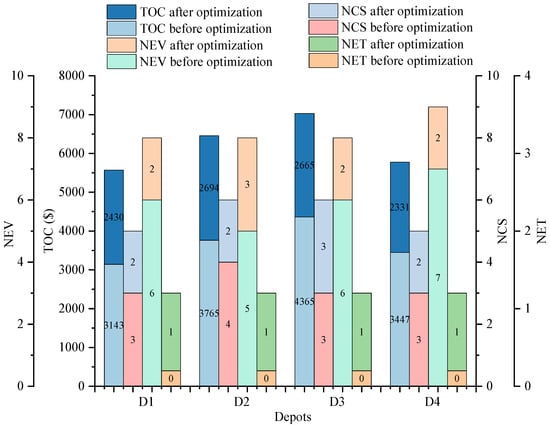
Figure 11.
Comparison of the results before and after optimization.
As presented in Table 10, the initial network has a TOC of 14,720, with 13 NCS and 22 NEVs. Post-optimization, the TOC is reduced by 31%, while the NEV and NCS decrease by four and 13, respectively. These enhancements demonstrate that the collaborative mechanism in the distribution network effectively reduces the NEV and NCS requirements, thereby improving resource utilization and ultimately lowering logistics operating costs. The optimized EV routes are outlined in Table 11 and Figure 12.
Table 11.
Optimization results of MDEVRPTW-DD.
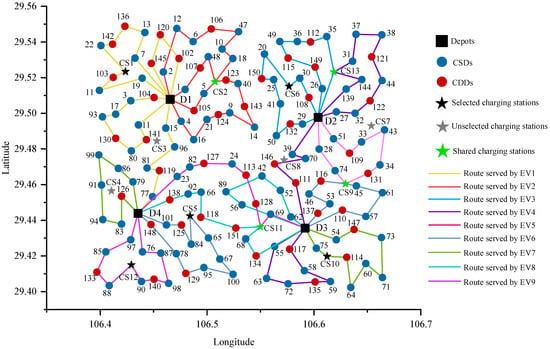
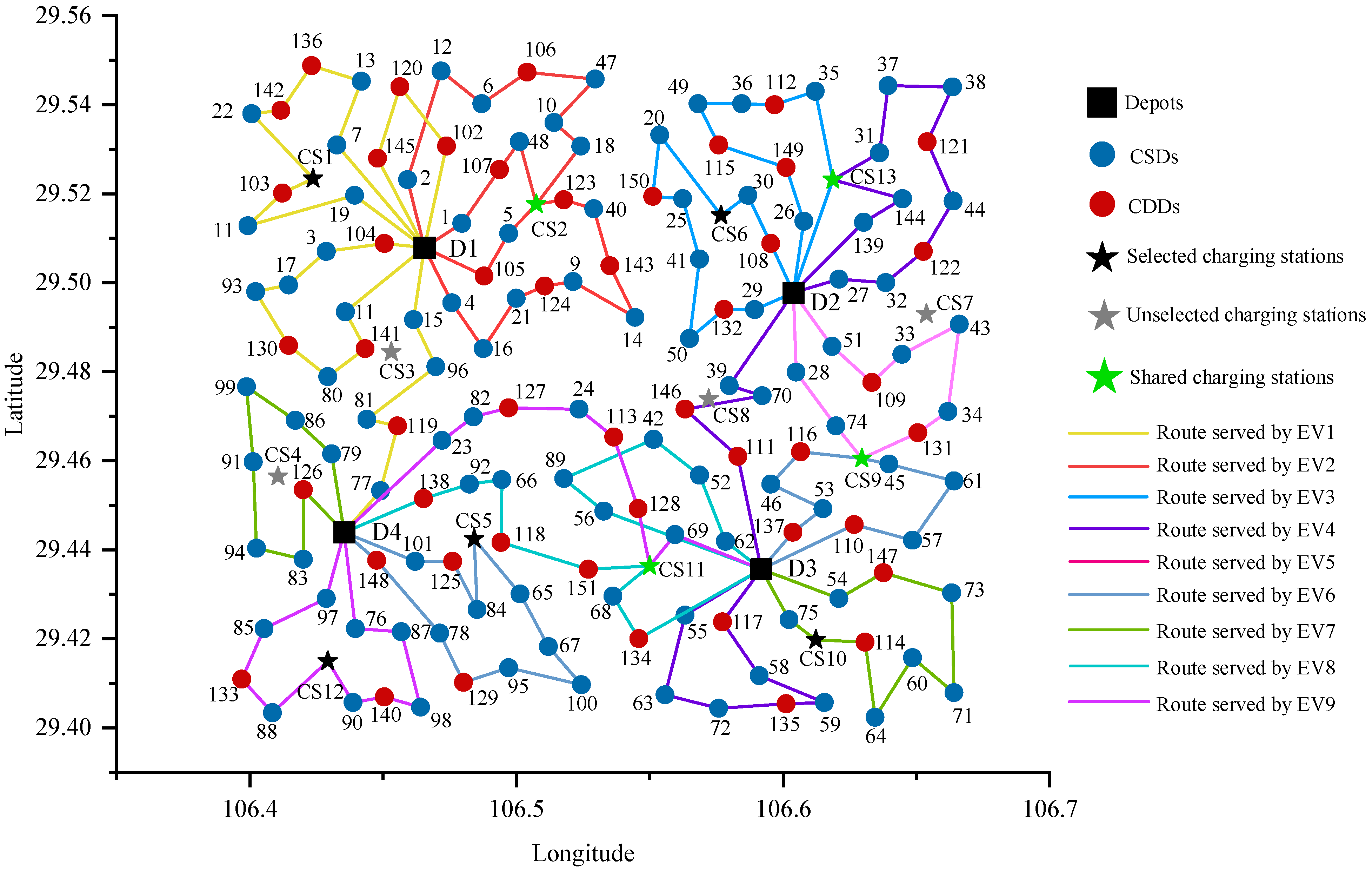
Figure 12.
Optimized EV routes of MDEVRPTW-DD.
Table 11 and Figure 12 display a total of twenty routes, which include four open routes. Given the shared nature of EVs and CSs across the distribution network, only nine EVs are necessary to serve all customers, and nine CSs are utilized to provide charging services for these EVs. For instance, EV4 is utilized across different service periods within D2 and also between D2 and D3. Additionally, four CSs are shared: CS2 is used within D1, CS9 is shared between D2 and D3, CS11 is shared between D3 and D4, and CS13 is utilized within D2.
6.4. Analysis and Discussion
6.4.1. Comparison of Different Strategies for CDDs
The response mode of the CDDs significantly affects both the TOC and distribution efficiency within a multi-depot EV distribution network. This section examines the variations in the TOC, EC, EDC, NEV, NCS, and other relevant metrics across three different cases: (1) the service response to dynamic customer demand from a dedicated depot alone, (2) the service response from a dedicated depot employing a dynamic customer demand insertion strategy, and (3) the service response under a collaborative delivery approach involving multiple depots and a dynamic customer demand insertion strategy. The corresponding optimization results for all three scenarios are compared and analyzed in Table 12 and Figure 13.
Table 12.
The calculation results for different strategies.
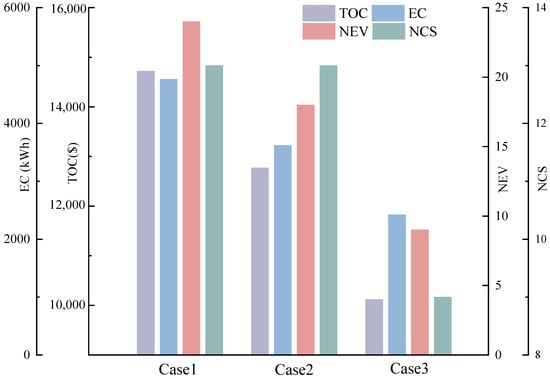
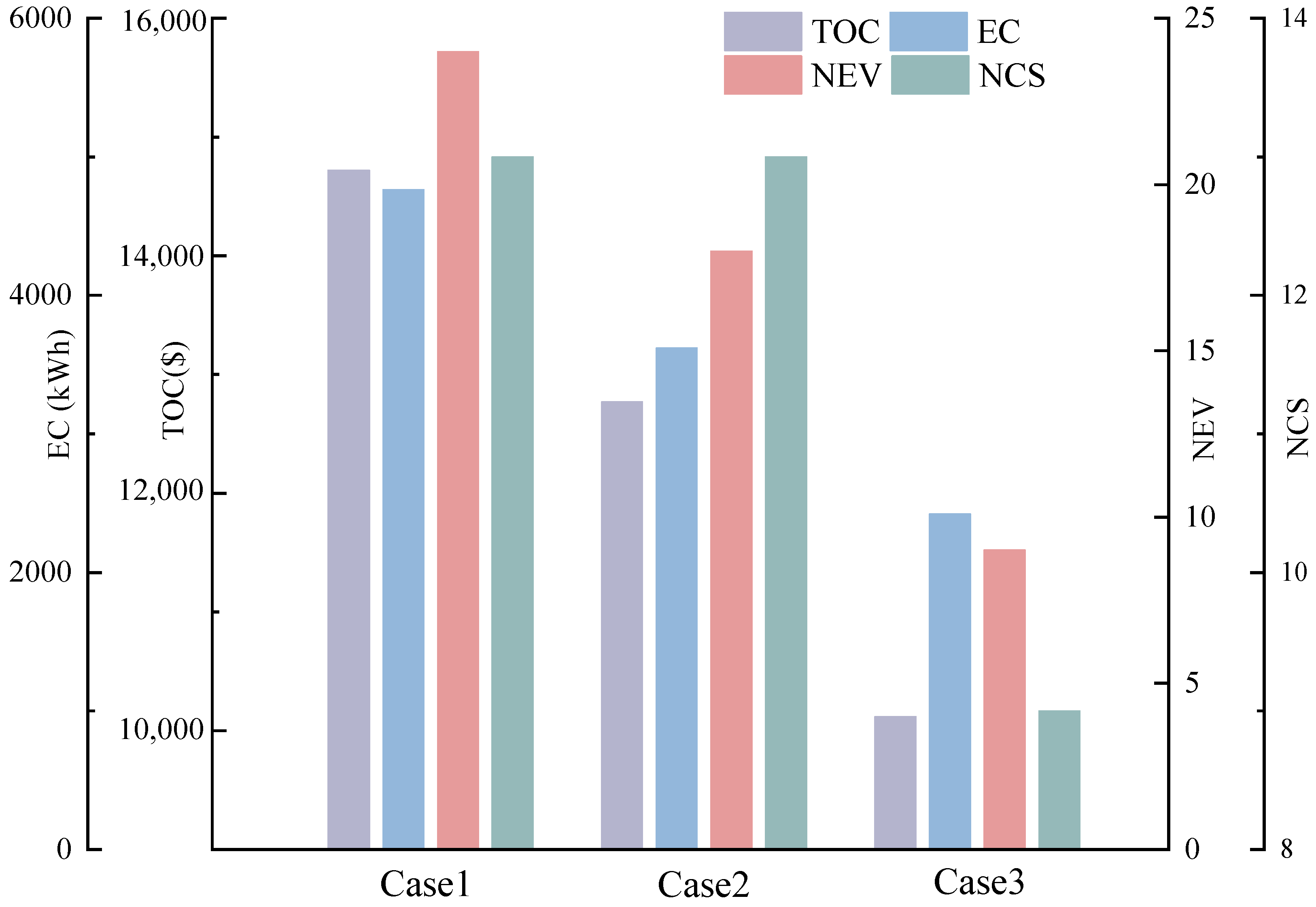
Figure 13.
Comparison among different cases in TOC, EC, NEV, and NCS.
In Table 12 and Figure 13, the TOC, NEV, and NCS are highest in Case 1, recording values of USD 14,720, 24, and 13, respectively. However, the implementation of the dynamic customer insertion strategy results in notable reductions in these metrics. Specifically, in Case 2, compared to in Case 1, the TOC decreases by 13%, from USD 14,720 to USD 12,769, the NEV declines by six, and EC drops by 24%, from 4763 kWh to 3622 kWh. Further improvements are evident in Case 3 with the integration of multi-depot collaborative distribution. Compared to in Case 2, the TOC decreases by an additional USD 2649, from USD 12,769 to USD 10,120. Additionally, the NEV and NCS decrease by nine and four, respectively, while EC experiences a significant 33% reduction, falling from 3622 kWh to 2421 kWh. Therefore, the combination of the dynamic customer insertion strategy and multi-depot collaborative distribution effectively reduces the TOC, EC, NEV, and NCS, while also enhancing resource utilization and distribution efficiency.
6.4.2. Comparison of Different Delivery Modes
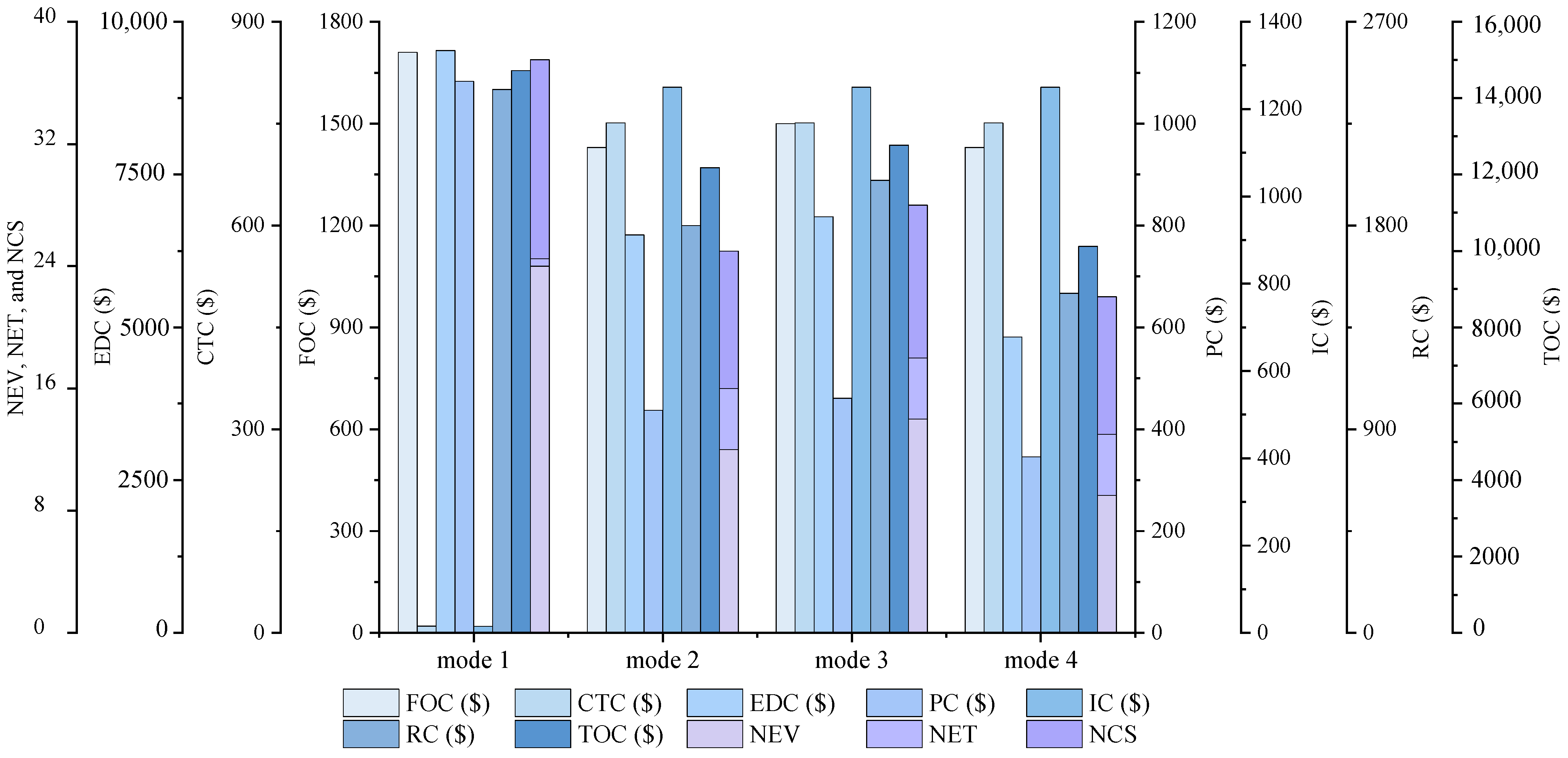
This section analyzes the effects of various delivery modes on the multi-depot collaborative distribution network by evaluating changes in key performance indicators, including the FOC, CTC, EDC, PC, IC, RC, TOC, NCS, NEV, and NET. Four delivery modes are considered: (1) the multi-depot independent distribution mode, (2) the closed multi-depot collaborative distribution mode, (3) the open multi-depot collaborative distribution mode, and (4) the open–closed collaborative distribution mode. A comparative analysis of the results is presented in Table 13 and Figure 14.
Table 13.
Comparison of different delivery modes.
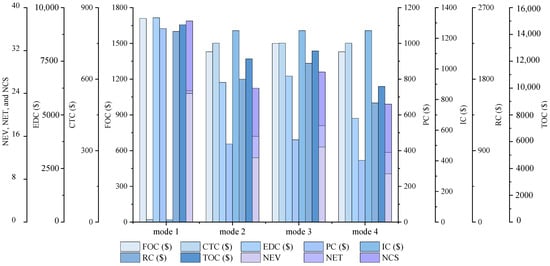
Figure 14.
Result comparison of different delivery modes.
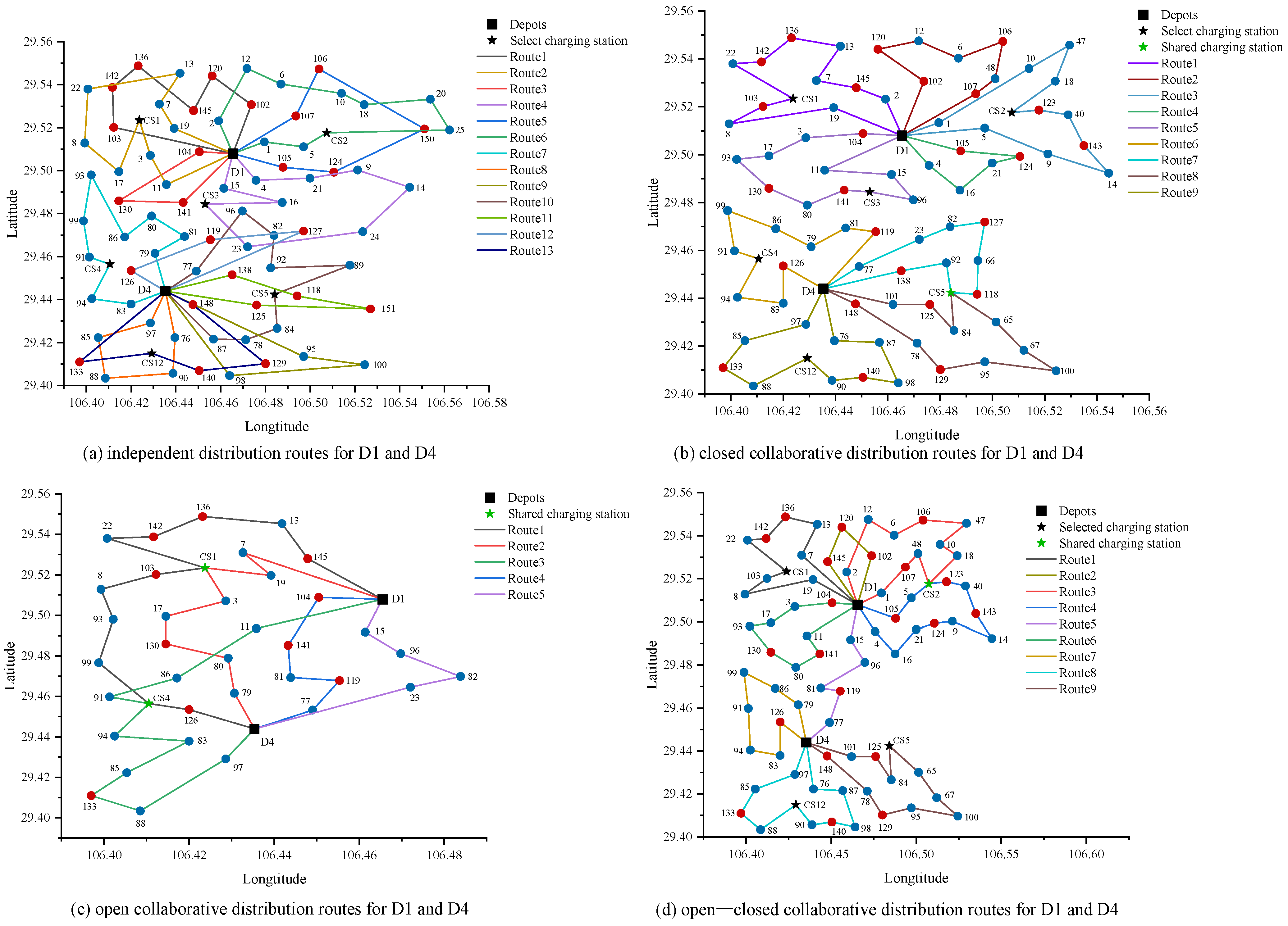
As illustrated in Table 13 and Figure 14, the open–closed collaborative distribution mode (Mode 4) demonstrates the lowest TOC and NEV. Specifically, the TOC for Mode 4 is USD 10,120, reflecting a 31% reduction compared to that for the multi-depot independent distribution mode (Mode 1), a 17% reduction relative to that for the closed multi-depot collaborative distribution mode (Mode 2), and a 21% reduction when compared to that for the open multi-depot collaborative distribution mode (Mode 3). Additionally, the NEV in Mode 4 is nine, which is fifteen less than in Mode 1, three less than in Mode 2, and five less than in Mode 3. These findings suggest that the open–closed collaborative distribution mode (Mode 4) effectively reduces the TOC, minimizes the NEV in operation, and enhances the utilization of EV resources. Figure 15 depicts the delivery routes for D1 and D4 across all four modes.
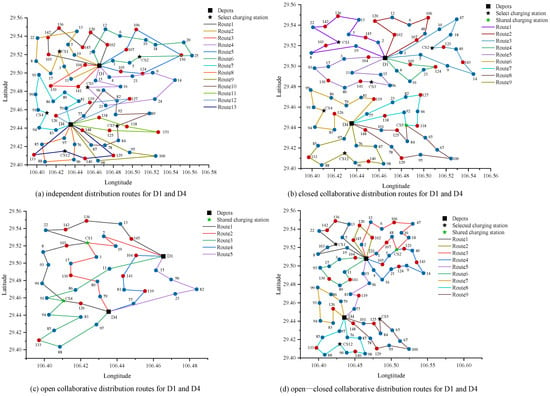
Figure 15.
Delivery routes of D1 and D4 for four modes.
7. Conclusions
This study presents an MDEVRPTW-DD optimization method incorporating customer delivery demands within a multi-depot EV distribution network. It includes resource sharing, a dynamic customer insertion strategy, and a charging station insertion strategy. The procedures for addressing the MDEVRPTW-DD are summarized as follows: First, a bi-objective vehicle routing optimization model is developed with the objectives of minimizing the TOC and NEV. Second, an IMODE algorithm based on a mini-batch k-means clustering algorithm is designed to derive the optimized delivery routes. Various genetic operations and a non-dominated sorting operation are implemented to enhance the quality of the Pareto-optimal solution. A dynamic customer insertion strategy is proposed to promptly address changing customer demands, while a charging station insertion strategy is included to ensure that EVs maintain adequate power to serve customers.
To validate the effectiveness of the proposed model and algorithm, the computational results from 30 instances are compared among the MOGA, MOPSO, the MOEA, MOACO, and the MOTS to demonstrate the superiority of the proposed algorithm in terms of the TOC and NEV. The case study utilizes real-world data from a new energy enterprise in Chongqing City, China, to substantiate the proposed model and algorithm. Compared with the initial logistics network, the optimized network reduces the TOC from USD 14,720 to USD 10,120, decreases the NEV from 24 to 9, lowers the NCS from 13 to 9, and reduces EC from 4780 kWh to 2410 kWh, thereby enhancing resource utilization and service efficiency. Furthermore, a comparison of the MDEVRPTW-DD solutions under response methods and different distribution models for CDDs is analyzed and discussed. The TOC, NEV, and EC are highest when dynamic customer demand is handled solely by a dedicated depot, reaching USD 14,720, 24, and 4763 kWh, respectively. However, under a collaborative delivery approach with multiple depots and a dynamic customer insertion strategy, the TOC decreases by 31.25%, the NEV is reduced by 15, and EC drops by 49.17%. These results demonstrate the cost-effectiveness of integrating the collaboration and dynamic customer insertion strategy in optimizing distribution efficiency. In comparison to the closed and open multi-depot collaborative distribution modes, the open–closed hybrid mode reduces the TOC by USD 2060 and USD 2652, decreases the NEV by three and five, and lowers the EDC by USD 1671 and USD 1967, respectively. Therefore, the economic benefits derived from the proposed model and method highlight the effectiveness of the MDEVRPTW-DD.
Although this study presents feasible and promising approaches for addressing the MDEVRPTW-DD, several avenues for future research can be explored: (1) More complex and dynamic customer scenarios can be considered, such as fluctuations in customer time windows and cancellations of demand. (2) The distribution model could be expanded to accommodate a broader range of goods, requiring additional three-dimensional data such as the volume, weight, and specific characteristics of the goods themselves. This would enable the model to handle diverse product types and incorporate factors like packaging constraints, handling requirements, and storage conditions, further enhancing its flexibility and applicability. (3) More realistic charging factors, such as incorporating queuing conditions, charging station capacity limitations, traffic congestion, and vehicle aging, should be integrated. These factors would account for variations in waiting times, energy costs, and operational constraints, aligning the model more closely with real-world scenarios. (4) A combination of multiple power replenishment strategies can be evaluated within the collaborative distribution process to alleviate concerns regarding mileage limitations.
Author Contributions
Conceptualization, Y.W. (Yong Wang), C.C. and Y.W. (Yuanhan Wei); methodology, Y.W. (Yong Wang), C.C. and Y.W. (Yuanhan Wei); software, C.C., Y.W. (Yuanhan Wei) and Y.W. (Yuanfan Wei); validation, C.C., Y.W. (Yuanhan Wei) and Y.W. (Yuanfan Wei); formal analysis, C.C., Y.W. (Yuanhan Wei) and Y.W. (Yuanfan Wei); investigation, Y.W. (Yong Wang), C.C., Y.W. (Yuanhan Wei) and Y.W. (Yuanfan Wei); resources, Y.W. (Yong Wang); data curation, Y.W. (Yong Wang) and C.C.; writing—original draft preparation, Y.W. (Yong Wang), C.C. and Y.W. (Yuanhan Wei); writing—review and editing, Y.W. (Yong Wang), C.C., Y.W. (Yuanhan Wei), Y.W. (Yuanfan Wei) and H.W.; visualization, C.C., Y.W. (Yuanhan Wei), Y.W. (Yuanfan Wei) and H.W.; supervision, Y.W. (Yong Wang) and H.W.; project administration, Y.W. (Yong Wang); funding acquisition, Y.W. (Yong Wang). All authors have read and agreed to the published version of the manuscript.
Funding
This research is supported by the National Natural Science Foundation of China (72371044), Major Scientific and Technological Research Program of Chongqing Municipal Education Commission (KJZD-M202300704), and Chongqing Bayu Scholar Youth Project (YS2021058).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Data is contained within the article.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Allahyari, S.; Yaghoubi, S.; Van Woensel, T. The secure time-dependent vehicle routing problem with uncertain demands. Comput. Oper. Res. 2021, 131, 105253. [Google Scholar] [CrossRef]
- Wang, S.; Sun, W.; Huang, M. An adaptive large neighborhood search for the multi-depot dynamic vehicle routing problem with time windows. Comput. Ind. Eng. 2024, 191, 110122. [Google Scholar] [CrossRef]
- Jiang, Y.; Hu, W.; Gu, W.; Yu, Y.; Xu, M. A multi-mode hybrid electric vehicle routing problem with time windows. Transportation Res. Part E Logist. Transp. Rev. 2025, 195, 103976. [Google Scholar] [CrossRef]
- Wang, Y.; Zhe, J.Y.; Wang, X.W.; Sun, Y.Y.; Wang, H. Z Collaborative multidepot vehicle routing problem with dynamic customer demands and time windows. Sustainability 2022, 14, 6709. [Google Scholar] [CrossRef]
- Basso, R.; Kulcsár, B.; Sanchez-Diza, I.; Qu, X.B. Dynamic stochastic electric vehicle routing with safe reinforcement learning. Transp. Res. Part E Logist. Transp. Rev. 2022, 157, 102496. [Google Scholar] [CrossRef]
- Macioszek, E. E-mobility infrastructure in the Górnośląsko-Zagłębiowska Metropolis, Poland, and potential for development. In Proceedings of the 5th World Congress on New Technologies, Lisbon, Portugal, 18–20 August 2019. [Google Scholar]
- Dong, J.T.; Wang, H.F.; Zhang, S.Z. Dynamic electric vehicle routing problem considering mid-route recharging and new demand arrival using an improved memetic algorithm. Sustain. Energy Technol. Assess. 2023, 58, 103366. [Google Scholar] [CrossRef]
- Li, J.X.; Liu, R.C.; Wang, R.N. Handling dynamic capacitated vehicle routing problems based on adaptive genetic algorithm with elastic strategy. Swarm Evol. Comput. 2024, 86, 101529. [Google Scholar] [CrossRef]
- Alvarez, A.; Cordeau, J.F.; Jans, R. The consistent vehicle routing problem with stochastic customers and demands. Transp. Res. Part B Methodol. 2024, 186, 102968. [Google Scholar] [CrossRef]
- Cacho EM, A.; Mangini, A.M.; Roccotelli, M.; Fanti, M.P. Electric vehicle routing optimization for postal delivery and waste collection in smart cities. IEEE Trans. Intell. Transp. Syst. 2025, 26, 3307–3323. [Google Scholar]
- Lu, J.; Chen, Y.; Hao, J.K.; He, R. The time-dependent electric vehicle routing problem: Model and solution. Expert Syst. Appl. 2020, 161, 113593. [Google Scholar] [CrossRef]
- Wang, Y.; Zhou, J.X.; Sun, Y.Y.; Fan, J.X.; Wang, Z.; Wang, H.Z. Collaborative multidepot electric vehicle routing problem with time windows and shared charging stations. Expert Syst. Appl. 2023, 219, 119654. [Google Scholar] [CrossRef]
- Karimpour, A.; Setak, M.; Hemmati, A. Estimating energy consumption and charging duration of electric vehicle in multigraph. Comput. Oper. Res. 2023, 155, 106216. [Google Scholar] [CrossRef]
- Gkiotsalitis, K.; Iliopoulou, C.; Kepaptsoglou, K. An exact approach for the multi-depot electric bus scheduling problem with time windows. Eur. J. Oper. Res. 2023, 306, 189–206. [Google Scholar] [CrossRef]
- Li, X.R.; Wang, W.; Gu, H. Redesign of sharing charging system for electric vehicles using blockchain technology. J. Clean. Prod. 2023, 415, 137775. [Google Scholar] [CrossRef]
- Agrali, C.; Lee, S. The multi-depot pickup and delivery problem with capacitated electric vehicles transfers, and time windows. Comput. Ind. Eng. 2023, 179, 109207. [Google Scholar] [CrossRef]
- Zhang, S.; Zhou, T.; Fang, C.; Yang, S.H. A novel collaborative electric vehicle routing problem with multiple prioritized time windows and time-dependent hybrid recharging. Expert Syst. Appl. 2024, 244, 122990. [Google Scholar] [CrossRef]
- Lu, C.C.; Yan, S.Y.; Li, H.C.; Diabat, A.; Wang, H.T. Optimal fleet deployment for electric vehicle sharing systems with the consideration of demand uncertainty. Comput. Oper. Res. 2021, 135, 105437. [Google Scholar] [CrossRef]
- Mancini, S.; Gansterer, M.; Hartl, R.F. The collaborative consistent vehicle routing problem with workload balance. Eur. J. Oper. Res. 2021, 293, 955–965. [Google Scholar] [CrossRef]
- Sarbijan, M.S.; Behnamian, J. Real-time collaborative feeder vehicle routing problem with flexible time windows. Swarm Evol. Comput. 2022, 75, 101201. [Google Scholar] [CrossRef]
- Ahari, S.A.; Bakir, I.; Roodbergen, K.J. A new perspective on carrier collaboration: Collaborative vehicle utilization. Transp. Res. Part C Emerg. Technol. 2024, 163, 104647. [Google Scholar] [CrossRef]
- Zhang, S.; Gajpal, Y.; Appadoo, S.S.; Abdulkader MM, S. Electric vehicle routing problem with recharging stations for minimizing energy consumption. Int. J. Prod. Econ. 2018, 203, 404–413. [Google Scholar] [CrossRef]
- Pelletier, S.; Jabali, O.; Laporte, G. The electric vehicle routing problem with energy consumption uncertainty. Transp. Res. Part B Methodol. 2019, 126, 225–255. [Google Scholar] [CrossRef]
- Comert, S.E.; Yazgan, H.R. A new approach based on hybrid ant colony optimization-artificial bee colony algorithm for multi-objective electric vehicle routing problems. Eng. Appl. Artif. Intell. 2023, 123, 106375. [Google Scholar] [CrossRef]
- Shen, Y.; Wu, J.; Ma, M.; Du, X.; Wu, H.; Fei, X.; Niu, D. Improved differential evolution algorithm based on cooperative multi-population. Eng. Appl. Artif. Intell. 2024, 133, 108149. [Google Scholar] [CrossRef]
- Li, M.; Zhao, Y.; Cao, R.; Wang, J.; Wu, D. A recursive framework for improving the performance of multi-objective differential evolution algorithms for gene selection. Swarm Evol. Comput. 2024, 87, 101546. [Google Scholar] [CrossRef]
- Wang, Y.; Yu, X.; Zhang, W. An improved reinforcement learning-based differential evolution algorithm for combined economic and emission dispatch problems. Eng. Appl. Artif. Intell. 2025, 140, 109709. [Google Scholar] [CrossRef]
- Wu, H.; Pang GK, H.; Choy, K.L.; Lam, H.Y. An optimization model for electric vehicle battery charging at a battery swapping station. IEEE Trans. Veh. Technol. 2017, 67, 881–895. [Google Scholar] [CrossRef]
- Liu, W.L.; Gong, Y.J.; Chen, W.N.; Liu, Z.; Wang, H.; Zhang, J. Coordinated charging scheduling of electric vehicles: A mixed-variable differential evolution approach. IEEE Trans. Intell. Transp. Syst. 2019, 21, 5094–5109. [Google Scholar] [CrossRef]
- Sethanan, K.; Jamrus, T. Hybrid differential evolution algorithm and genetic operator for multi-trip vehicle routing problem with backhauls and heterogeneous fleet in the beverage logistics industry. Comput. Ind. Eng. 2020, 146, 106571. [Google Scholar] [CrossRef]
- Souza, I.P.; Boeres MC, S.; Moraes RE, N. A robust algorithm based on differential evolution with local search for the capacitated vehicle routing problem. Swarm Evol. Comput. 2023, 77, 101245. [Google Scholar] [CrossRef]
- Shao, S.; Guan, W.; Bi, J. Electric vehicle-routing problem with charging demands and energy consumption. IET Intell. Transp. Syst. 2018, 12, 202–212. [Google Scholar] [CrossRef]
- Shen, Y.; Yu, L.; Li, J. Robust electric vehicle routing problem with time windows under demand uncertainty and weight-related energy consumption. Complex Syst. Model. Simul. 2022, 2, 18–34. [Google Scholar] [CrossRef]
- Lera-Romero, G.; Bront JJ, M.; Soulignac, F.J. A branch-cut-and-price algorithm for the time-dependent electric vehicle routing problem with time windows. Eur. J. Oper. Res. 2024, 312, 978–995. [Google Scholar] [CrossRef]
- Li, H.; Li, Z.; Cao, L.; Wang, R.; Ren, M. Research on optimization of electric vehicle routing problem with time window. IEEE Access 2020, 8, 146707–146718. [Google Scholar] [CrossRef]
- Asghari, M.; Al-e SM, J.M. Green vehicle routing problem: A state-of-the-art review. Int. J. Prod. Econ. 2021, 231, 107899. [Google Scholar] [CrossRef]
- Zeng, Z.; Zhang, M.; Chen, T.; Hong, Z. A new selection operator for differential evolution algorithm. Knowl.-Based Syst. 2021, 226, 107150. [Google Scholar] [CrossRef]
- Alesiani, F.; Ermis, G.; Gkiotsalitis, K. Constrained clustering for the capacitated vehicle routing problem. Appl. Artif. Intell. 2022, 36, 1995658. [Google Scholar] [CrossRef]
- Ahmed, M.A.; Baharin, H.; Nohuddin PN, E. Mini-batch k-means versus k-means to cluster english tafseer text: View of Al-Baqarah chapter. J. Quranic Sci. Res. 2021, 2, 48–53. [Google Scholar] [CrossRef]
- Han, X.; Wang, Z.; Xu, H.J. Time-weighted collaborative filtering algorithm based on improved mini batch K-means clustering. Adv. Sci. Technol. 2021, 105, 309–317. [Google Scholar]
- Kunnapapdeelert, S.; Klinsrisuk, R. Determination of green vehicle routing problem via differential evolution. Int. J. Logist. Syst. Manag. 2019, 34, 395–410. [Google Scholar] [CrossRef]
- Wang, Y.; Wei, Y.H.; Wang, X.W.; Wang, Z.; Wang, H.Z. A clustering-based extended genetic algorithm for the multidepot vehicle routing problem with time windows and three-dimensional loading constraints. Appl. Soft Comput. 2023, 133, 109922. [Google Scholar] [CrossRef]
- Wei, Y.H.; Wang, Y.; Hu, X.P. The two-echelon truck-unmanned ground vehicle routing problem with time-dependent travel times. Transp. Res. Part E Logist. Transp. Rev. 2025, 194, 103954. [Google Scholar] [CrossRef]
- Sankul, S.; Supattananon, N.; Akararungruangkul, R.; Wichapa, N. An adaptive differential evolution algorithm to solve the multi-compartment vehicle routing problem: A case of cold chain transportation problem. Int. J. Prod. Manag. Eng. 2024, 12, 91–104. [Google Scholar] [CrossRef]
- Ming, Y.L.; Erbao, C. An improved differential evolution algorithm for vehicle routing problem with simultaneous pickups and deliveries and time windows. Eng. Appl. Artif. Intell. 2010, 23, 188–195. [Google Scholar] [CrossRef]
- Moonsri, K.; Sethanan, K.; Worasan, K.; Nitisiri, K. A hybrid and self-adaptive differential evolution algorithm for the multi-depot vehicle routing problem in egg distribution. Appl. Sci. 2021, 12, 35. [Google Scholar] [CrossRef]
- Malik, S.; Kim, D.H. Optimal travel route recommendation mechanism based on neural networks and particle swarm optimization for efficient tourism using tourist vehicular data. Sustainability 2019, 11, 3357. [Google Scholar] [CrossRef]
- Ge, X.; Zhu, Z.; Jin, Y. Electric vehicle routing problems with stochastic demands and dynamic remedial measures. Math. Probl. Eng. 2020, 2020, 8795284. [Google Scholar] [CrossRef]
- Archetti, C.; Guerriero, F.; Macrina, G. The online vehicle routing problem with occasional drivers. Comput. Oper. Res. 2021, 127, 105144. [Google Scholar] [CrossRef]
- Chen, S.; Chen, R.; Wang, G.G.; Gao, J.; Sangaiah, A.K. An adaptive large neighborhood search heuristic for dynamic vehicle routing problems. Comput. Electr. Eng. 2018, 67, 596–607. [Google Scholar] [CrossRef]
- Montoya, A.; Guéret, C.; Mendoza, J.E.; Villegas, J.G. The electric vehicle routing problem with nonlinear charging function. Transp. Res. Part B Methodol. 2017, 103, 87–110. [Google Scholar] [CrossRef]
- Wang, Y.; Gou, M.Y.; Luo, S.Y.; Fan, J.X.; Wang, H.Z. The multi-depot pickup and delivery vehicle routing problem with time windows and dynamic demands. Eng. Appl. Artif. Intell. 2025, 139, 109700. [Google Scholar] [CrossRef]
- Wang, Y.; Yuan, Y.Y.; Guan, X.Y.; Wang, H.Z.; Liu, Y.; Xu, M.Z. Collaborative mechanism for pickup and delivery problems with heterogeneous vehicles under time windows. Sustainability 2019, 11, 3492. [Google Scholar] [CrossRef]
- Zhao, P.X.; Luo, W.H.; Han, X. Time-dependent and bi-objective vehicle routing problem with time windows. Adv. Prod. Eng. Manag. 2019, 14, 201–212. [Google Scholar] [CrossRef]
- Guezouli, L.; Abdelhamid, S. Multi-objective optimization using genetic algorithm based clustering for multi-depot heterogeneous fleet vehicle routing problem with time windows. Int. J. Math. Oper. Res. 2018, 13, 332–349. [Google Scholar] [CrossRef]
- Labidi, H.; Azzouna, N.B.; Hassine, K.; Gouider, M.S. An improved genetic algorithm for solving the multi-objective vehicle routing problem with environmental considerations. Procedia Comput. Sci. 2023, 225, 3866–3875. [Google Scholar] [CrossRef]
- Kuo, R.J.; Luthfiansyah, M.F.; Masruroh, N.A.; Zulvia, F.E. Application of improved multi-objective particle swarm optimization algorithm to solve disruption for the two-stage vehicle routing problem with time windows. Expert Syst. Appl. 2023, 225, 120009. [Google Scholar] [CrossRef]
- Dutta, J.; Barma, P.S.; Mukherjee, A.; Kar, S.; De, T. A hybrid multi-objective evolutionary algorithm for open vehicle routing problem through cluster primary-route secondary approach. Int. J. Manag. Sci. Eng. Manag. 2022, 17, 132–146. [Google Scholar] [CrossRef]
- Li, J.Y.; Deng, X.Y.; Zhan, Z.H.; Yu, L.; Tan, K.C.; Lai, K.K.; Zhang, J. A multipopulation multiobjective ant colony system considering travel and prevention costs for vehicle routing in COVID-19-like epidemics. IEEE Trans. Intell. Transp. Syst. 2022, 23, 25062–25076. [Google Scholar] [CrossRef]
- Xu, W.; Hu, Y.; Luo, W.; Wang, L.; Wu, R. A multi-objective scheduling method for distributed and flexible job shop based on hybrid genetic algorithm and tabu search considering operation outsourcing and carbon emission. Comput. Ind. Eng. 2021, 157, 107318. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).