

Evaluating the Environmental and Safety Impacts of Eco-Driving in Urban and Highway Environments

 , , ,
, , ,  and
and 
Abstract
:1. Introduction
2. Literature Review
3. Methods
3.1. Experiment Overview
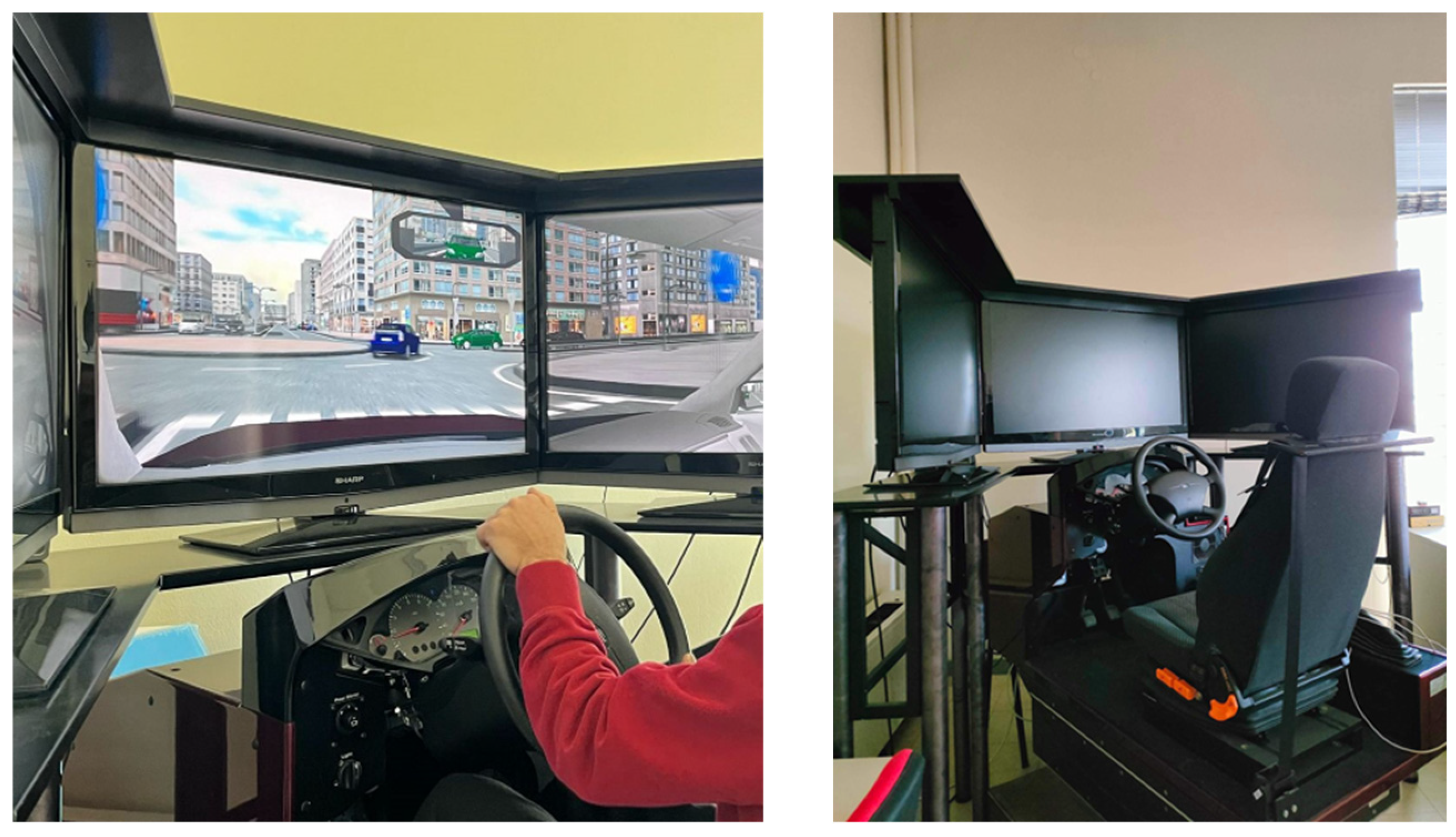
3.1.1. Driving Simulator Framework
3.1.2. Experimental Scenarios
3.1.3. Study Protocol
- Phase 1: Participants performed a test drive before completing two baseline scenarios.
- Phase 2: Completing two baseline scenarios maintaining a regular driving style.
- Phase 3: After completing an eco-driving briefing and reading an informational leaflet, participants repeated the scenarios, implementing eco-driving strategies outlined in the material provided.
3.1.4. Emissions Calculation
3.2. Regression Analysis
3.2.1. Linear Regression Model (Emissions)
3.2.2. Binary Logistic Regression Model (Crash Probability)
3.2.3. Model Validation and Evaluation Metrics
3.2.4. Results Interpretation
4. Results
4.1. Environmental Emissions Models
4.1.1. CO2 Emissions
- CO2/km: CO2 emissions per kilometer driven (g/km);
- Eco: Eco-driving scenario (e.g., 0 = non-eco-driving behavior and 1 = eco-driving behavior);
- Environment: Driving environment (e.g., 0 = urban network, 1 = highway);
- RoutesPerDay: Average number of trips per day (e.g., 0 = 0 trips, 1 = 1 trip, …, 6 = more than 5 trips);
- AvgDRight: Average distance from the right side of the road (m).
4.1.2. CO Emissions
- CO/km: CO emissions per kilometer driven (g/km);
- Eco: Eco-driving scenario (e.g., 0 = non-eco-driving behavior and 1 = eco-driving behavior);
- Environment: Driving environment (e.g., 0 = urban network, 1 = highway);
- RoutesPerDay: Average number of trips per day (e.g., 0 = 0 trips, 1 = 1 trip, …, 6 = more than 5 trips);
- AvgDRight: Average distance from the right side of the road (m).
4.1.3. NOx Emissions
- NOx/km: NOx emissions per kilometer driven (g/km);
- Eco: Eco-driving scenario (e.g., 0 = non-eco-driving behavior and 1 = eco-driving behavior);
- Environment: Driving environment (e.g., 0 = urban network, 1 = highway);
- AvgTTC: Time to collision from the leading vehicle (ms);
- Avgrspur: Lateral offset of the vehicle from the center of the road (m);
- Gender: Driver’s gender (e.g., 1 = Male, 2 = Female).
4.2. Crash Probability Model
- NumOfCrashesAverage: Indicator of crash occurrence (e.g., 0 = No and 1 = Yes);
- Eco: Eco-driving scenario (e.g., 0 = non-eco-driving behavior and 1 = eco-driving behavior);
- Environment: Driving environment (e.g., 0 = urban network, 1 = highway);
- Years license: Years of driving license possession.
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
| Question | Variable | Coding |
|---|---|---|
| A1 | Years since obtaining a driving license (Years license) | 0: [0], 1: [1], 2: [2], …, 12: [12] |
| A2 | Years of actual driving experience | 0: [0], 1: [1], 2: [2], …, 12: [12] |
| A3 | Days per week driving in urban areas | 1: [1], 2: [2], …, 7: [7], 8: [Fewer] |
| A4 | Days per week driving on highways | 1: [1], 2: [2], …, 7: [7], 8: [Fewer] |
| A5 | Average kilometers per week in urban areas | 1: [<20], 2: [20–50], …, 5: [>150] |
| A6 | Average kilometers per week on highways | 1: [<20], 2: [20–50], …, 5: [>150] |
| A7 | Average number of routes per day (RoutesPerDay) | 0: [0], 1: [1], …, 6: [>5] |
| A8 | Average kilometers driven per day | - |
| B1 | Vehicle ownership status | 1: [Yes], 2: [No] |
| B2 | Fuel type used by the participant’s vehicle | 1: [Gasoline], 2: [Diesel], 3: [LPG], 4: [Natural Gas], 5: [Electric] |
| B3 | Monthly fuel expenditure | 1: [<50], 2: [51–100], 3: [101–200], 4: [>200] |
| B4 | Age of the vehicle | - |
| C1 | Familiarity with eco-driving principles | 1: [Yes], 2: [No] |
| C2 | Frequency of eco-driving | 1: [Never], 2: [Rarely], 3: [Sometimes], 4: [Often], 5: [Always] |
| C3 | Degree of adherence to speed limits | 1: [Not at all], 2: [A little], 3: [Quite a bit], 4: [Much], 5: [Very much] |
| C4.1 | Frequency of driving at low speeds | 1: [Not at all], 2: [Rarely], 3: [Sometimes], 4: [Often], 5: [Always] |
| C4.2 | Frequency of maintaining a constant speed | 1: [Not at all], 2: [Rarely], 3: [Sometimes], 4: [Often], 5: [Always] |
| C4.3 | Coordination of speed with traffic flow | 1: [Not at all], 2: [Rarely], 3: [Sometimes], 4: [Often], 5: [Always] |
| C4.4 | Keeping engine speed low | 1: [Not at all], 2: [Rarely], 3: [Sometimes], 4: [Often], 5: [Always] |
| C4.5 | Control over acceleration | 1: [Not at all], 2: [Rarely], 3: [Sometimes], 4: [Often], 5: [Always] |
| C4.6 | Control over deceleration | 1: [Not at all], 2: [Rarely], 3: [Sometimes], 4: [Often], 5: [Always] |
| C4.7 | Maintaining safe distance from other vehicles | 1: [Not at all], 2: [Rarely], 3: [Sometimes], 4: [Often], 5: [Always] |
| C4.8 | Applying eco-driving techniques on downhill roads | 1: [Not at all], 2: [Rarely], 3: [Sometimes], 4: [Often], 5: [Always] |
| C4.9 | Applying eco-driving techniques on uphill roads | 1: [Not at all], 2: [Rarely], 3: [Sometimes], 4: [Often], 5: [Always] |
| C5 | Awareness of fuel reduction methods | 1: [Yes], 2: [No] |
| C6 | Importance assigned to eco-driving | 1: [Not at all], 2: [A little], 3: [Quite a bit], 4: [Much], 5: [Very much] |
| D1 | Participant’s age | - |
| D2 | Gender of the participant (Gender) | 1: [Male], 2: [Female], 3: [Other] |
| D3 | Interest in driving | 1: [Yes], 2: [No] |
| D4 | Marital status | 1: [Single], 2: [Married], 3: [Divorced], 4: [Widowed] |
| D5 | Annual family income | 1: [<10,000], 2: [10,000–25,000], 3: [>25,000] |
| D6 | Educational level | 1: [Primary], 2: [Secondary], 3: [Undergraduate], 4: [Postgraduate], 5: [Doctorate], 6: [Other] |
References
- Rajbhandari, S.; Shrestha, S.L.; Bhandari, R.; Jha, A.K.; Darlami, H.B. Contribution to the Net-Zero Emissions Target from the Transport Sector through Electric Mobility—A Case of Kathmandu Valley. Sustainability 2024, 16, 1211. [Google Scholar] [CrossRef]
- Boucher, M. Transportation Electrification and Managing Traffic Congestion: The Role of Intelligent Transportation Systems. IEEE Electrif. Mag. 2019, 7, 16–22. [Google Scholar] [CrossRef]
- Fameli, K.M.; Assimakopoulos, V.D. Development of a Road Transport Emission Inventory for Greece and the Greater Athens Area: Effects of Important Parameters. Sci. Total Environ. 2015, 505, 770–786. [Google Scholar] [CrossRef]
- European Environment Agency. Air Quality in Europe 2022; European Environment Agency: Copenhagen, Denmark, 2022. [Google Scholar]
- Allison, C.K.; Stanton, N.A. Eco-Driving: The Role of Feedback in Reducing Emissions from Everyday Driving Behaviours. Theor. Issues Ergon. Sci. 2019, 20, 85–104. [Google Scholar] [CrossRef]
- Gkagkas, K.; Ponnuchamy, V.; Dašić, M.; Stanković, I. Molecular Dynamics Investigation of a Model Ionic Liquid Lubricant for Automotive Applications. Tribol. Int. 2017, 113, 83–91. [Google Scholar] [CrossRef]
- Fontaras, G.; Zacharof, N.-G.; Ciuffo, B. Fuel Consumption and CO2 Emissions from Passenger Cars in Europe—Laboratory versus Real-World Emissions. Prog. Energy Combust. Sci. 2017, 60, 97–131. [Google Scholar] [CrossRef]
- Betts, R.A.; Collins, M.; Hemming, D.L.; Jones, C.D.; Lowe, J.A.; Sanderson, M.G. When Could Global Warming Reach 4 °C? Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2011, 369, 67–84. [Google Scholar] [CrossRef]
- Paschalidou, A.K.; Petrou, I.; Fytianos, G.; Kassomenos, P. Anatomy of the Atmospheric Emissions from the Transport Sector in Greece: Trends and Challenges. Environ. Sci. Pollut. Res. 2022, 29, 34670–34684. [Google Scholar] [CrossRef]
- Guzek, M. Driver’s Reaction Time in the Context of an Accident in Road Traffic. In Research Methods and Solutions to Current Transport Problems; Mirosław, S., Krzykowska, K., Eds.; Springer International Publishing: Cham, Switzerland, 2020; pp. 184–193. [Google Scholar]
- Alam, M.S.; McNabola, A. A Critical Review and Assessment of Eco-Driving Policy & Technology: Benefits & Limitations. Transp. Policy 2014, 35, 42–49. [Google Scholar] [CrossRef]
- World Health Organization. Global Status Report on Road Safety. 2023. Available online: https://www.who.int/publications/i/item/9789240086517 (accessed on 6 March 2024).
- Morello, E.; Toffolo, S.; Magra, G. Impact Analysis of Ecodriving Behaviour Using Suitable Simulation Platform (ICT-EMISSIONS Project). Transp. Res. Procedia 2016, 14, 3119–3128. [Google Scholar] [CrossRef]
- Arroyo-López, P.; Velázquez-Martínez, J.C.; Gámez-Pérez, K.M. Past Behavior as a Predictor of Eco-Driving Practices: The Case of a Sustained Intervention in a Mexican Transportation Company. Int. J. Sustain. Transp. 2022, 16, 989–1002. [Google Scholar] [CrossRef]
- Xu, Z.; Jiang, T.; Zheng, N. Developing and Analyzing Eco-Driving Strategies for on-Road Emission Reduction in Urban Transport Systems—A VR-Enabled Digital-Twin Approach. Chemosphere 2022, 305, 135372. [Google Scholar] [CrossRef]
- Wang, Y.; Boggio-Marzet, A. Evaluation of Eco-Driving Training for Fuel Efficiency and Emissions Reduction According to Road Type. Sustainability 2018, 10, 3891. [Google Scholar] [CrossRef]
- Lois, D.; Wang, Y.; Boggio-Marzet, A.; Monzon, A. Multivariate Analysis of Fuel Consumption Related to Eco-Driving: Interaction of Driving Patterns and External Factors. Transp. Res. D Transp. Environ. 2019, 72, 232–242. [Google Scholar] [CrossRef]
- Ayyildiz, K.; Cavallaro, F.; Nocera, S.; Willenbrock, R. Reducing Fuel Consumption and Carbon Emissions through Eco-Drive Training. Transp. Res. Part F Traffic Psychol. Behav. 2017, 46, 96–110. [Google Scholar] [CrossRef]
- Coloma, J.F.; García, M.; Wang, Y. Eco-Driving Effects Depending On The Travelled Road. Correlation Between Fuel Consumption Parameters. Transp. Res. Procedia 2018, 33, 259–266. [Google Scholar] [CrossRef]
- Bakibillah, A.S.M.; Kamal, M.A.S.; Tan, C.P.; Hayakawa, T.; Imura, J. Optimal Eco-Driving Scheme for Reducing Energy Consumption and Carbon Emissions on Curved Roads. Heliyon 2024, 10, e23586. [Google Scholar] [CrossRef]
- Kim, K.; Lee, H.; Song, C.; Kang, C.; Cha, S.W. Optimization of Speed Trajectory for Eco-Driving Considering Road Characteristics. In Proceedings of the 2018 IEEE Vehicle Power and Propulsion Conference (VPPC), Chicago, IL, USA, 27–30 August 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1–5. [Google Scholar]
- Hibberd, D.L.; Jamson, A.H.; Jamson, S.L. The Design of an In-Vehicle Assistance System to Support Eco-Driving. Transp. Res. Part C Emerg. Technol. 2015, 58, 732–748. [Google Scholar] [CrossRef]
- Nævestad, T.-O. Eco Driving as a Road Safety Measure: Before and after Study of Three Companies. Transp. Res. Part F Traffic Psychol. Behav. 2022, 91, 95–115. [Google Scholar] [CrossRef]
- Nævestad, T.-O.; Milch, V.; Blom, J. Traffic Safety Effects of Economic Driving in Trucking Companies. Transp. Res. Part F Traffic Psychol. Behav. 2023, 95, 322–342. [Google Scholar] [CrossRef]
- Huang, Y.; Ng, E.C.Y.; Zhou, J.L.; Surawski, N.C.; Chan, E.F.C.; Hong, G. Eco-Driving Technology for Sustainable Road Transport: A Review. Renew. Sustain. Energy Rev. 2018, 93, 596–609. [Google Scholar] [CrossRef]
- Li, X.; Vaezipour, A.; Rakotonirainy, A.; Demmel, S.; Oviedo-Trespalacios, O. Exploring Drivers’ Mental Workload and Visual Demand While Using an in-Vehicle HMI for Eco-Safe Driving. Accid. Anal. Prev. 2020, 146, 105756. [Google Scholar] [CrossRef]
- Zhao, X.; Wu, Y.; Rong, J.; Zhang, Y. Development of a Driving Simulator Based Eco-Driving Support System. Transp. Res. Part C Emerg. Technol. 2015, 58, 631–641. [Google Scholar] [CrossRef]
- Chen, Z. A Forecast of CO2 Emissions Based on the Fuel Consumption Rating of a Particular Vehicle. Highlights Sci. Eng. Technol. 2024, 92, 87–93. [Google Scholar] [CrossRef]
- Cha, J.; Park, J.; Lee, H.; Chon, M.S. A Study of Prediction Based on Regression Analysis for Real-World CO2 Emissions with Light-Duty Diesel Vehicles. Int. J. Automot. Technol. 2021, 22, 569–577. [Google Scholar] [CrossRef]
- Das, S.; Sun, X.; Wang, F.; Leboeuf, C. Estimating Likelihood of Future Crashes for Crash-Prone Drivers. J. Traffic Transp. Eng. (Engl. Ed.) 2015, 2, 145–157. [Google Scholar] [CrossRef]
- Kononen, D.W.; Flannagan, C.A.C.; Wang, S.C. Identification and Validation of a Logistic Regression Model for Predicting Serious Injuries Associated with Motor Vehicle Crashes. Accid. Anal. Prev. 2011, 43, 112–122. [Google Scholar] [CrossRef]
- Washington, S.; Karlaftis, M.; Mannering, F.; Anastasopoulos, P. Statistical and Econometric Methods for Transportation Data Analysis, 2nd ed.; Chapman and Hall/CRC: Boca Raton, FL, USA, 2011. [Google Scholar]
- Caban, J.; Vrábel, J.; Šarkan, B.; Ignaciuk, P. About Eco-Driving, Genesis, Challenges and Benefits, Application Possibilities. Transp. Res. Procedia 2019, 40, 1281–1288. [Google Scholar] [CrossRef]
- Matsumoto, Y.; Tsurudome, D. Evaluation of Providing Recommended Speed for Reducing CO2 Emissions from Vehicles by Driving Simulator. Transp. Res. Procedia 2014, 3, 31–40. [Google Scholar] [CrossRef]
- Coloma, J.F.; Garcia, M.; Boggio-Marzet, A.; Monzón, A. Developing Eco-Driving Strategies Considering City Characteristics. J. Adv. Transp. 2020, 2020, 2083074. [Google Scholar] [CrossRef]
- Beusen, B.; Broekx, S.; Denys, T.; Beckx, C.; Degraeuwe, B.; Gijsbers, M.; Scheepers, K.; Govaerts, L.; Torfs, R.; Panis, L.I. Using On-Board Logging Devices to Study the Longer-Term Impact of an Eco-Driving Course. Transp. Res. D Transp. Environ. 2009, 14, 514–520. [Google Scholar] [CrossRef]
- Savković, T.; Miličić, M.; Tanackov, I.; Pitka, P.; Koleška, D. Short-Term and Long-Term Impacts of Eco-Driving on Dynamics of Driving Behaviour and Operating Parameters. Transport 2020, 35, 143–155. [Google Scholar] [CrossRef]
- Jin, Q.S.; Song, G.H.; Ye, M.M.; Yu, L. Optimization of Eco-Driving Trajectories at Intersections for Energy Saving and Emissions Reduction. In CICTP 2015; American Society of Civil Engineers: Reston, VA, USA, 2015; pp. 2684–2695. [Google Scholar]
- Ng, C.Y.; Huang, Y.; Hong, G.; Zhou, J.; Surawski, N.; Ho, J.; Chan, E. Effects of an On-Board Safety Device on the Emissions and Fuel Consumption of a Light Duty Vehicle; SAE Technical Paper: Warrendale, PA, USA, 2018. [Google Scholar]
- Fafoutellis, P.; Mantouka, E.G.; Vlahogianni, E.I. Eco-Driving and Its Impacts on Fuel Efficiency: An Overview of Technologies and Data-Driven Methods. Sustainability 2020, 13, 226. [Google Scholar] [CrossRef]
- Coloma, J.F.; García, M.; Wang, Y.; Monzón, A. Green Eco-Driving Effects in Non-Congested Cities. Sustainability 2017, 10, 28. [Google Scholar] [CrossRef]
- Li, X.; Vaezipour, A.; Rakotonirainy, A.; Demmel, S. Effects of an In-Vehicle Eco-Safe Driving System on Drivers’ Glance Behaviour. Accid. Anal. Prev. 2019, 122, 143–152. [Google Scholar] [CrossRef] [PubMed]
- Goes, G.; Bandeira, R.; Gonçalves, D.; de Almeida D’Agosto, M.; Oliveira, C. The Effect of Eco-Driving Initiatives toward Sustainable Urban Waste Collection. Int. J. Sustain. Transp. 2020, 14, 569–578. [Google Scholar] [CrossRef]
- Tu, R.; Xu, J.; Li, T.; Chen, H. Effective and Acceptable Eco-Driving Guidance for Human-Driving Vehicles: A Review. Int. J. Environ. Res. Public Health 2022, 19, 7310. [Google Scholar] [CrossRef]
- Xu, N.; Li, X.; Liu, Q.; Zhao, D. An Overview of Eco-Driving Theory, Capability Evaluation, and Training Applications. Sensors 2021, 21, 6547. [Google Scholar] [CrossRef]


| Independent Variables | βi | Std. Error | t Value | p-Value | e | e* |
|---|---|---|---|---|---|---|
| Discrete variables | ||||||
| (Constant) | 6.603 | 0.032 | 205.419 | 0.00 *** | ||
| Eco | −0.094 | 0.018 | −5.107 | 0.00 *** | −0.014 | 1.00 |
| Environment | −0.373 | 0.006 | −14.002 | 0.00 *** | 0.056 | −3.974 |
| RoutesPerDay | −2.036 | 0.009 | −3.936 | 0.00 *** | −0.021 | 1.476 |
| Continuous variables | ||||||
| AvgDRight | 0.019 | 0.471 | 2.202 | 0.02 * | 0.00002 | 1.00 |
| R2 = 0.789 Adjusted R2 = 0.783 | ||||||
| Independent Variables | βi | Std. Error | t Value | p-Value | e | e* |
|---|---|---|---|---|---|---|
| Discrete variables | ||||||
| (Constant) | 0.318 | 0.0802 | 3.960 | 0.00 *** | ||
| Eco | −0.49 | 0.0458 | −10.688 | 0.00 *** | −0.982 | 2.738 |
| Environment | −0.472 | 0.0664 | 7.111 | 0.00 *** | 0.946 | −2.64 |
| RoutesPerDay | −0.03 | 0.01463 | −2.038 | 0.04 * | −0.358 | 1.00 |
| Continuous variables | ||||||
| AvgDRight | 0.075 | 0.02154 | 3.491 | 0.00 *** | 0.002 | 1.00 |
| R2 = 0.690 Adjusted R2 = 0.681 | ||||||
| Independent Variables | βi | Std. Error | t Value | p-Value | e | e* |
|---|---|---|---|---|---|---|
| Discrete variables | ||||||
| (Constant) | −2.149 | 0.1003 | −21.418 | 0.00 *** | ||
| Eco | −0.495 | 0.0438 | −11.303 | 0.00 *** | −0.207 | −2.771 |
| Environment | −1.04 | 0.0532 | 19.550 | 0.00 *** | 0.436 | 5.827 |
| Gender | 0.089 | 0.0435 | 2.051 | 0.04 * | 0.075 | 1.00 |
| Continuous variables | ||||||
| AvgTTC | 0.00004 | 0.00 | −5.401 | 0.00 *** | −0.0000003 | 1.00 |
| Avgrspur | −0.082 | 0.0222 | −3.686 | 0.001 ** | −0.0003 | 2215.138 |
| R2 = 0.813 Adjusted R2 = 0. 806 | ||||||
| Independent Variables | βi | Std. Error | z Value | p-Value | e | e* |
|---|---|---|---|---|---|---|
| Discrete variables | ||||||
| (Constant) | 2.3497 | 0.625 | 3.762 | 0.0002 *** | ||
| Eco | −2.608 | 0.499 | −5.222 | 0.00 *** | −0.900 | 1.037 |
| Environment | −2.326 | 0.488 | −4.765 | 0.00 *** | −0.868 | 1.00 |
| Continuous variables | ||||||
| Years license | −0.2538 | 0.1104 | −2.299 | 0.0215 * | −0.636 | 1.00 |
| Model Calibration Assessment Average Predicted Probability = 0.3269 | ||||||
| Average Observed Occurrence = 0.3269 | ||||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sekadakis, M.; Sousouni, M.I.; Garefalakis, T.; Oikonomou, M.G.; Ziakopoulos, A.; Yannis, G. Evaluating the Environmental and Safety Impacts of Eco-Driving in Urban and Highway Environments. Sustainability 2025, 17, 2762. https://doi.org/10.3390/su17062762
Sekadakis M, Sousouni MI, Garefalakis T, Oikonomou MG, Ziakopoulos A, Yannis G. Evaluating the Environmental and Safety Impacts of Eco-Driving in Urban and Highway Environments. Sustainability. 2025; 17(6):2762. https://doi.org/10.3390/su17062762
Chicago/Turabian StyleSekadakis, Marios, Maria Ioanna Sousouni, Thodoris Garefalakis, Maria G. Oikonomou, Apostolos Ziakopoulos, and George Yannis. 2025. "Evaluating the Environmental and Safety Impacts of Eco-Driving in Urban and Highway Environments" Sustainability 17, no. 6: 2762. https://doi.org/10.3390/su17062762
APA StyleSekadakis, M., Sousouni, M. I., Garefalakis, T., Oikonomou, M. G., Ziakopoulos, A., & Yannis, G. (2025). Evaluating the Environmental and Safety Impacts of Eco-Driving in Urban and Highway Environments. Sustainability, 17(6), 2762. https://doi.org/10.3390/su17062762