
Toward Atmospheric Correction Algorithms for Sentinel-3/OLCI Images of Productive Waters



Abstract
:1. Introduction
2. Materials and Methods
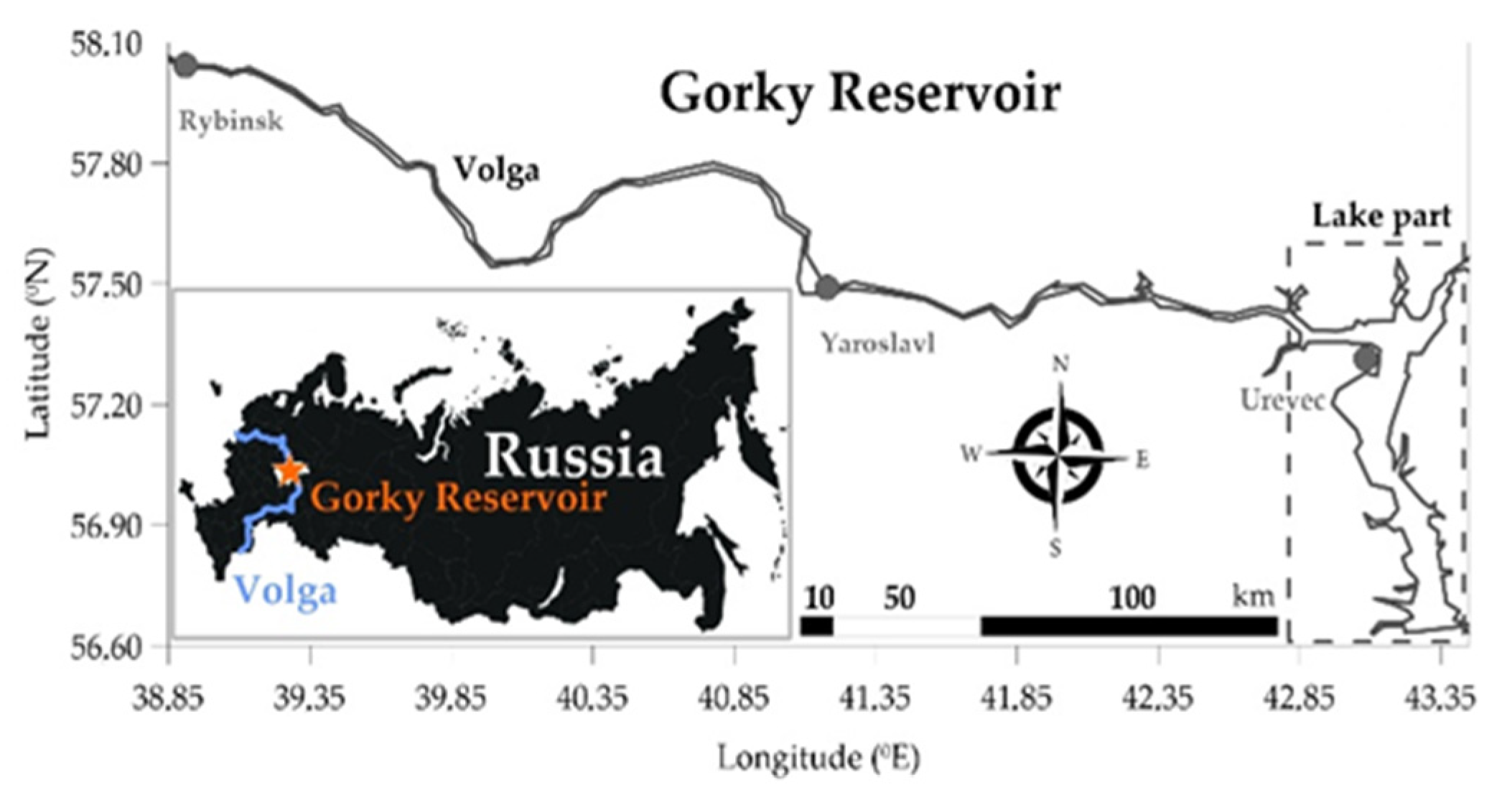
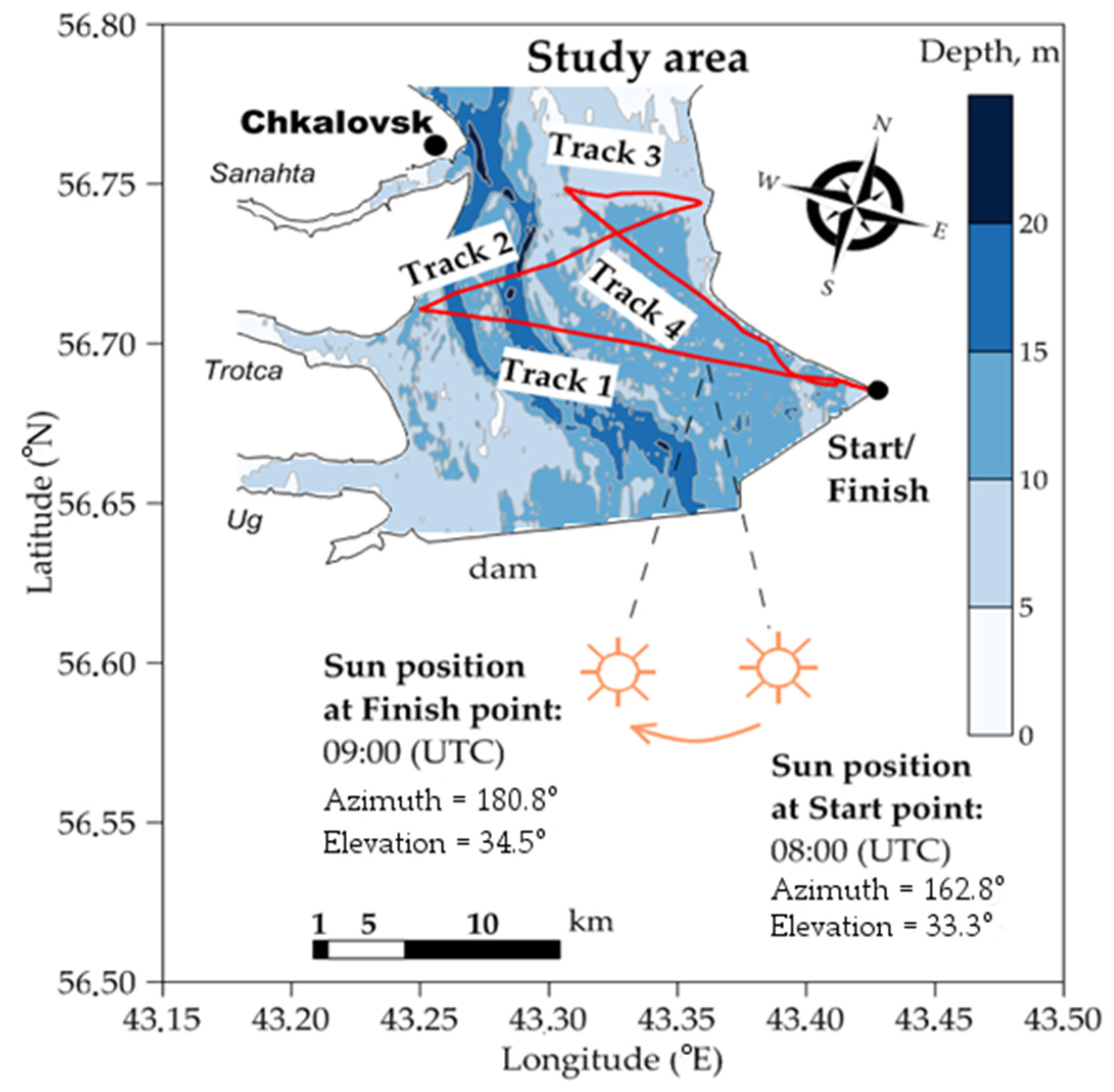
2.1. Study Area
2.2. Field Measurements
2.2.1. Radiometric Measurements
2.2.2. LiDAR Measurements
2.2.3. Water Sampling
2.3. Sentinel-3/OLCI Imagery and Image Processing
2.3.1. Match-Ups for Satellite Validation and Spatial–Temporal Variability within a Pixel
2.3.2. Atmospheric Correction
- The common NASA approach applied to MODIS imagery [23], in which aerosol reflectance is calculated from two NIR bands (779 nm and 865 nm), and then extrapolated to visible bands, together with an iterative procedure for calculating the water-leaving reflectance in the NIR bands [24] (termed ac(779, 865) hereafter). Standard flagging was used, namely, pixels with WATER flag, excluding ATM_FAIL, HIGLINT, HILT, HIPOL, HISATZEN, HISOLZEN, SEAICE, CLDICE, and STRAYTLIGHT;
- The algorithm is similar to the previous one, but the NIR–SWIR bands of 865 nm and 1012 nm are used to calculate the aerosol reflectance (hereinafter referred to as ac(865, 1012)). Due to the strong water absorption in SWIR, these bands are successfully used in atmospheric correction over turbid waters [52,53]. We are exploring the possibility of using an OLCI SWIR band at 1016 nm to improve AC over eutrophic waters. Masking is the same as in 1;
- The MUMM algorithm (hereinafter referred to as MUMM) is a well-known algorithm for estimating the water-leaving reflectance in turbid waters, based on the assumption of spatial homogeneity of NIR band relations for aerosol and water-leaving reflectance in the subscene [50]. In fact, MUMM is an algorithm with a fixed type of aerosol, the concentration of which can vary in an image. MUMM often shows a significant improvement in turbid coastal waters than the ac(779, 865) algorithm. Masking is the same as in 1;
- OL_2_WFR radiometric products (hereinafter referred to as L2W) contain the water-leaving reflectance ρw, on 16 spectral bands, related to the remote sensing reflectance Rrs by the relation Rrs = ρw/π. They are obtained in accordance with the ESA’s standard atmospheric correction procedure combining two approaches: (i) a baseline AC, which is a combination of the black-water approach with the bright pixel atmospheric correction [21,22], and (ii) an alternative AC, in which atmospheric parameters and water-leaving reflectance are inverted using neural networks [54]. The following set of common quality flags was used: pixels including INLAND_WATER, excluding AC_FAIL and INVALID, CLOUD, CLOUD_AMBIGUOUS, CLOUD_MARGIN, SNOW_ICE, COSMETIC, SATURATED, SUSPECT, HISOLZEN, HIGHGLINT, ADJAC, and WHITECAP. RWNEG* flags were not used, since the presence and number of negative values of remote sensing reflectance were criteria for the suitability of AC algorithm for the Gorky Reservoir;
- Atmospheric correction using a fixed aerosol, the properties of which are determined by the AOD spectrum (hereinafter referred to as fixed AOD). This method consists of two consecutive calculations using the ac(779, 865) algorithm. Based on the first calculation, the AOD spectra were determined for all water pixels of the area of interest. As our research has shown, the AOD spectra vary widely (AOD(865) = 0.005, …, 0.692) even over a small area (up to 10 × 10 km). Smaller AOD values are found in areas with cleaner water, and larger ones, in waters with a high phytoplankton concentration. Such a large AOD scatter is most likely due not to spatial changes in atmospheric aerosol, but to incorrect determination of aerosol parameters in areas with a high phytoplankton content. To determine the AOD spectra over clean water, which is less susceptible to atmospheric correction errors, we used the fifth percentile of AOD in all water pixels in the study area. Assuming that the properties of the atmospheric aerosol within the study area were constant or varied only slightly, these fixed AOD spectra were further used in the second calculation using l2gen (aer_opt = −8). Approaches in which the aerosol type is determined from the nearest non-turbid area were also implemented in [55,56]. In contrast to these approaches, we assume that both the aerosol type and its optical properties can be considered constant on small spatial scales.
2.3.3. Accuracy Metrics
3. Results
3.1. In Situ Measurements
3.1.1. Variations of Spectra within One Pixel
3.1.2. Variations of Spectra in Point with Time
3.2. Validation of the Remote Sensing Reflectance
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Donlon, C.; Berruti, B.; Buongiorno, A.; Ferreira, M.H.H.; Féménias, P.; Frerick, J.; Goryl, P.; Klein, U.; Laur, H.; Mavrocordatos, C.; et al. The Global Monitoring for Environment and Security (GMES) Sentinel-3 mission. Remote Sens. Environ. 2012, 120, 37–57. [Google Scholar] [CrossRef]
- Sentinel-3A Product Notice—OLCI Level-2 Ocean Colour. Operational Products and Full-Mission Reprocessed Time Series. EUM/OPS-SEN3/DOC/17/964713 S3A.PN.OLCI-L2M.02. Is. 11/01/2018. Ver.1.0. Available online: https://www-cdn.eumetsat.int/files/2020-04/pdf_s3a_pn_olci_l2_rep.pdf (accessed on 30 May 2022).
- Blix, K.; Li, J.; Massicotte, P.; Matsuoka, A. Developing a New Machine-Learning Algorithm for Estimating Chlorophyll-a Concentration in Optical Complex Waters: A Case Study for High Northern Latitude Waters by Using Sentinel 3 OLCI. Remote Sens. 2019, 11, 2076. [Google Scholar] [CrossRef] [Green Version]
- Riddick, C.A.; Hunter, P.D.; Domínguez Gómez, J.A.; Martinez-Vicente, V.; Présing, M.; Horváth, H.; Kovács, A.W.; Vörös, L.; Zsigmond, E.; Tyler, A.N. Optimal Cyanobacterial Pigment Retrieval from Ocean Colour Sensors in a Highly Turbid, Optical Complex Lake. Remote Sens. 2019, 11, 1613. [Google Scholar] [CrossRef] [Green Version]
- Xue, K.; Ma, R.; Wang, D.; Shen, M. Optical Classification of the Remote Sensing Reflectance and Its Application in Deriving the Specific Phytoplankton Absorption in Optical Complex Lakes. Remote Sens. 2019, 11, 184. [Google Scholar] [CrossRef] [Green Version]
- Watanabe, F.; Alcântara, E.; Imai, N.; Rodrigues, T.; Bernardo, N. Estimation of Chlorophyll-a Concentration from Optimizing a Semi-Analytical Algorithm in Productive Inland Waters. Remote Sens. 2018, 10, 227. [Google Scholar] [CrossRef] [Green Version]
- Toming, K.; Kutser, T.; Uiboupin, R.; Arikas, A.; Vahter, K.; Paavel, B. Mapping Water Quality Parameters with Sentinel-3 Ocean and Land Colour Instrument imagery in the Baltic Sea. Remote Sens. 2017, 9, 1070. [Google Scholar] [CrossRef] [Green Version]
- Lins, R.C.; Martinez, J.-M.; Motta Marques, D.D.; Cirilo, J.A.; Fragoso, C.R. Assessment of Chlorophyll-a Remote Sensing Algorithms in a Productive Tropical Estuarine-Lagoon System. Remote Sens. 2017, 9, 516. [Google Scholar] [CrossRef] [Green Version]
- Eleveld, M.A.; Ruescas, A.B.; Hommersom, A.; Moore, T.S.; Peters, S.W.M.; Brockmann, C. An Optical Classification Tool for Global Lake Waters. Remote Sens. 2017, 9, 420. [Google Scholar] [CrossRef] [Green Version]
- Wolanin, A.; Soppa, M.A.; Bracher, A. Investigation of Spectral Band Requirements for Improving Retrievals of Phytoplankton Functional Types. Remote Sens. 2016, 8, 871. [Google Scholar] [CrossRef] [Green Version]
- Lin, J.; Lyu, H.; Miao, S.; Pan, Y.; Wu, Z.; Li, Y.; Wang, Q. A two-step approach to mapping particulate organic carbon (POC) in inland water using OLCI images. Ecol. Indic. 2018, 90, 502–512. [Google Scholar] [CrossRef]
- Blix, K.; Pálffy, K.; Tóth, V.R.; Eltoft, T. Remote Sensing of Water Quality Parameters over Lake Balaton by Using Sentinel-3 OLCI. Water 2018, 10, 1428. [Google Scholar] [CrossRef] [Green Version]
- Pahlevan, N.; Smith, B.; Schalles, J.; Binding, C.; Cao, Z.; Ma, R.; Alikas, K.; Kangro, K.; Gurlin, D.; Nguyễn Hà, N.; et al. Seamless retrievals of chlorophyll- a from Sentinel-2 (MSI) and Sentinel-3 (OLCI) in inland and coastal waters: A machine-learning approach. Remote Sens. Environ. 2020, 240, 111604. [Google Scholar] [CrossRef]
- Gossn, J.I.; Ruddick, K.G.; Dogliotti, A.I. Atmospheric Correction of OLCI Imagery over Extremely Turbid Waters Based on the Red, NIR and 1016 nm Bands and a New Baseline Residual Technique. Remote Sens. 2019, 11, 220. [Google Scholar] [CrossRef] [Green Version]
- Mograne, M.A.; Jamet, C.; Loisel, H.; Vantrepotte, V.; Mériaux, X.; Cauvin, A. Evaluation of Five Atmospheric Correction Algorithms over French Optical-Complex Waters for the Sentinel-3A OLCI Ocean Color Sensor. Remote Sens. 2019, 11, 668. [Google Scholar] [CrossRef] [Green Version]
- Kravitz, J.; Matthews, M.; Bernard, S.; Griffith, D. Application of Sentinel 3 OLCI for chl-a retrieval over small inland water targets: Successes and challenges. Remote Sens. Environ. 2020, 237, 111562. [Google Scholar] [CrossRef]
- Vanhellemont, Q.; Ruddick, K. Atmospheric correction of Sentinel-3/OLCI data for mapping of suspended particulate matter and chlorophyll-a concentration in Belgian turbid coastal waters. Remote Sens. Environ. 2021, 256, 112284. [Google Scholar] [CrossRef]
- Doerffer, R.; Schiller, H. MERIS Regional Coastal and Lake Case 2 Water Project Atmospheric Correction ATBD, Rep. GKSS-KOF-MERIS-ATBD01; GKSS Research Center, Institute of Coastal Research: Geesthacht, Germany, 2008; Volume 1. [Google Scholar]
- Brockmann, C.; Doerffer, R.; Peters, M.; Stelzer, K.; Embacher, S.; Ruescas, A. Evolution of the C2RCC neural network for Sentinel 2 and 3 for the retrieval of ocean color products in normal and extreme optically complex waters. In Proceedings of the Living Planet Symposium 2016, Prague, Czech Republic, 9–13 May 2016; European Space Agency Special Publication: Prague, Czech Republic, 2016; Volume ESA SP-740, pp. 1–6. [Google Scholar]
- Steinmetz, F.; Deschamps, P.Y.; Ramon, D. Atmospheric correction in presence of sun glint: Application to MERIS. Opt. Express 2011, 19, 9783–9800. [Google Scholar] [CrossRef] [Green Version]
- Antoine, D.; Morel, A. A multiple scattering algorithm for atmospheric correction of remotely sensed ocean color (MERIS instrument): Principle and implementation for atmospheres carrying various aerosols including absorbing ones. Int. J. Remote Sens. 1999, 20, 1875–1916. [Google Scholar] [CrossRef]
- Moore, G.F.; Aiken, J.; Lavender, S.J. The atmospheric correction of water color and the quantitative retrieval of suspended particulate matter in Case II waters: Application to MERIS. Int. J. Remote Sens. 1999, 20, 1713–1733. [Google Scholar] [CrossRef]
- Gordon, H.R.; Wang, M. Retrieval of water-leaving radiance and aerosol optical thickness over the oceans with SeaWiFS: A preliminary algorithm. Appl. Opt. 1994, 33, 443–452. [Google Scholar] [CrossRef]
- Bailey, S.W.; Franz, B.A.; Werdell, P.J. Estimation of near-infrared water-leaving reflectance for satellite ocean color data processing. Opt. Express 2010, 18, 7521–7527. [Google Scholar] [CrossRef]
- Zibordi, G.; Mélin, F.; Berthon, J.-F. A Regional Assessment of OLCI Data Products. IEEE Geosci. Remote Sens. Lett. 2018, 15, 1490–1494. [Google Scholar] [CrossRef]
- Molkov, A.A.; Fedorov, S.V.; Pelevin, V.V.; Korchemkina, E.N. Regional Models for High-Resolution Retrieval of Chlorophyll a and TSM Concentrations in the Gorky Reservoir by Sentinel-2 Imagery. Remote Sens. 2019, 11, 1215. [Google Scholar] [CrossRef] [Green Version]
- Kapustin, I.A.; Molkov, A.A. Structure of Currents and Depth in the Lake Part of the Gorky Reservoir. Russ. Meteorol. Hydrol. 2019, 7, 110–117. [Google Scholar]
- Mueller, J.L.; Pietras, C.; Hooker, S.B.; Austin, R.W.; Miller, M.; Knobelspiesse, K.D.; Frouin, R.; Holben, B.; Voss, K. Ocean Optics Protocols for Satellite Ocean Color Sensor Validation, Revision 4, Volume II: Instrument Specifications, Characterization and Calibration (NASA/TM-2003-21621/Rev-Vol II); Goddard Space Flight Space Center: Greenbelt, MD, USA, 2003; pp. 1–56. [Google Scholar]
- Mobley, C.D. Estimation of the remote sensing reflectance from above–water methods. Appl. Optics 1999, 38, 7442–7455. [Google Scholar] [CrossRef]
- Hyper-Spectral Laser Induced Fluorescent Lidar Sensors Systems OceanVisual. Available online: www.oceanvisuals.no (accessed on 29 May 2022).
- Raymetrics Fluorescent Lidar. Available online: https://raymetrics.com/fluorescence-lidar/ (accessed on 29 May 2022).
- LDI Fluorescent Lidars. Available online: www.ldi-innovation.com/index.php/hyperspectral-lif-lidar (accessed on 29 May 2022).
- Fiorani, L.; Okladnikov, I.G.; Palucci, A. Remote Sensing of the Southern Ocean by MERIS, MODIS, Seawifs and ENEA Lidar. J. Optoelectron. Adv. Mater. 2008, 10, 1482–1488. [Google Scholar]
- Hoge, F.E.; Lyon, P.E.; Swift, R.N.; Yungel, J.K.; Abbott, M.R.; Letelier, R.M.; Esaias, W.E. Validation of Terra-MODIS Phytoplankton Chlorophyll Fluorescence Line Height. I. Initial Airborne Lidar Results. Appl. Opt. 2003, 42, 2767–2771. [Google Scholar] [CrossRef] [PubMed]
- Ma, S.; Liu, Z.S.; Zhang, K.L.; Li, Z.G.; He, S.Y. Field Experiment of an Airborne Oceanographic Lidar and Comparison with a Moderate Resolution Imaging Spectroradiometer. Lasers Eng. 2006, 16, 413–421. [Google Scholar]
- Moreno-Madrinan, M.J.; Al-Hamdan, M.Z.; Rickman, D.L.; Muller-Karger, F.E. Using the Surface Reflectance MODIS Terra Product to Estimate Turbidity in Tampa Bay, Florida. Remote Sens. 2010, 2, 2713–2728. [Google Scholar] [CrossRef]
- Palmer, S.C.J.; Kutser, T.; Hunter, P.D. Remote Sensing of Inland Waters: Challenges, Progress and Future Directions. Remote Sens. Environ. 2015, 157, 1–8. [Google Scholar] [CrossRef] [Green Version]
- Palmer, S.C.; Pelevin, V.V.; Goncharenko, I.V.; Kovács, A.; Zlinszky, A.; Présing, M.; Horváth, H.; Nicolás-Perea, V.; Balzter, H.; Tóth, V. Ultraviolet Fluorescence Lidar (UFL) as a Measurement Tool for Water Quality Parameters in Turbid Lake Conditions. Remote Sens. 2013, 5, 4405–4422. [Google Scholar] [CrossRef]
- Pelevin, V.; Zlinszky, A.; Khimchenko, E.; Toth, V. Ground truth data on Chlorophyll-a, chromophoric dissolved organic constituents and suspended sediment concentrations in the upper water layer as obtained by LIF Lidar at high spatial resolution. Int. J. Remote Sens. 2017, 38, 1967–1982. [Google Scholar] [CrossRef] [Green Version]
- Pelevin, V.; Zavialov, P.; Konovalov, B.; Zlinszky, A.; Palmer, S.; Toth, V.; Goncharenko, I.; Khymchenko, L.; Osokina, V. Measurements with high spatial resolution of Chlorophyll-a, CDOM and total suspended constituents in coastal zones and inland water basins by the portable UFL Lidar. In Proceedings of the 35th EARSeL Symposium—European Remote Sensing: Progress, Challenges and Opportunities, Stockholm, Sweden, 15–18 June 2015. [Google Scholar]
- SCOR-UNESCO. Report of SCOR-UNESCO Working Group 17 on Determination of Photosynthetic Pigments in SEA WATER. In Monograph of Oceanography Methodology; UNESCO: Paris, France, 1966; Volume 1, pp. 9–18. [Google Scholar]
- Jeffrey, S.W.; Humphrey, G.F. New spectrophotometric equations for determining chlorophylls a, b, c1 and c2 in higher plants, algae and natural phytoplankton. Biochem. Physiol. Pflanz. 1975, 167, 191–194. [Google Scholar] [CrossRef]
- Mueller, J.L.; Bidigare, R.R.; Trees, C.; Balch, W.M.; Dore, J.; Drapeau, D.T.; Karl, D.; Van Heukelem, L.; Perl, J. Ocean Optics Protocols for Satellite Ocean Color Sensor Validation, Revision 5, Volume 5: Biogeochemical and Bio-Optical Measurements and Data Analysis Protocols; Goddard Space Flight Space Center: Greenbelt, MD, USA, 2003; pp. 5–24. [Google Scholar]
- Bao, Y.; Tian, Q.; Chen, M.A. Weighted Algorithm Based on Normalized Mutual Information for Estimating the Chlorophyll-a Concentration in Inland Waters Using Geostationary Ocean Color Imager (GOCI) Data. Remote Sens. 2015, 7, 11731–11752. [Google Scholar] [CrossRef] [Green Version]
- Alikas, K.; Kangro, K.; Reinart, A. Detecting cyanobacterial blooms in large North European lakes using the Maximum Chlorophyll Index. Oceanologia 2010, 52, 237–257. [Google Scholar] [CrossRef] [Green Version]
- Moses, W.J.; Gitelson, A.A.; Berdnikov, S.; Povazhnyy, V. Satellite estimation of Chlorophyll-a concentration using the red and NIR bands of MERIS-2014; The Azov sea case study. IEEE Geosci. Remote Sens. Lett. 2009, 6, 845–849. [Google Scholar] [CrossRef]
- Peng, F.; Liu, S.; Xu, H.; Li, Z. A Comparative Study on the Analysis Methods for Chlorophyll-a. Adv. Mater. Res. 2013, 726–731, 1411–1415. [Google Scholar] [CrossRef]
- Santos, A.C.A.; Calijuri, M.C.; Moraes, E.M.; Adorno, M.A.T.; Falco, P.B.; Carvalho, D.P.; Deberdt, G.L.B.; Benassi, S.F. Comparison of three methods for Chlorophyll determination: Spectrophotometry and Fluorimetry in samples containing pigment mixtures and spectrophotometry in samples with separate pigments through High Performance Liquid Chromatography. Acta Limnol. Bras. 2003, 15, 7–18. [Google Scholar]
- Bailey, S.W.; Werdell, P.J. A multi-sensor approach for the on-orbit validation of ocean color satellite data products. Remote Sens. Environ. 2006, 102, 12–23. [Google Scholar] [CrossRef]
- Ruddick, K.G.; Ovidio, F.; Rijkeboer, M. Atmospheric correction of SeaWiFS imagery for turbid coastal and inland waters. Appl. Opt. 2000, 39, 897–912. [Google Scholar] [CrossRef] [Green Version]
- Aiken, J.; Moore, G. ATBD Case 2 Bright Pixel Atmospheric Correction, Rep. PO-TN-MEL-GS-0005; Plymouth Marine Laboratory, Center Coastal Marine Sciences: Plymouth, UK, 2000; Volume 4. [Google Scholar]
- Shi, W.; Wang, M. An assessment of the black ocean pixel assumption for MODIS SWIR bands. Remote Sens. Environ. 2009, 113, 1587–1597. [Google Scholar] [CrossRef]
- Vanhellemont, Q.; Ruddick, K. Advantages of high quality SWIR bands for ocean color processing: Examples from Landsat-8. Remote Sens. Environ. 2015, 161, 89–106. [Google Scholar] [CrossRef] [Green Version]
- The European Space Agency. Available online: https://sentinel.esa.int/web/sentinel/technical-guides/sentinel-3-olci/level-2/ocean-processing (accessed on 29 May 2022).
- Dash, P.; Walker, N.; Mishra, D.; D’Sa, E.; Ladner, S. Atmospheric Correction and Vicarious Calibration of Oceansat-1 Ocean Color Monitor (OCM) Data in Coastal Case 2 Waters. Remote Sens. 2012, 4, 1716–1740. [Google Scholar] [CrossRef] [Green Version]
- Hu, C.; Carder, K.L.; Muller-Karger, F.E. Atmospheric correction of SeaWiFS imagery of turbid coastal waters: A practical method. Remote Sens. Environ. 2000, 74, 195–206. [Google Scholar] [CrossRef]
- NASA. SeaBASS. Available online: https://seabass.gsfc.nasa.gov/wiki/validation_description (accessed on 30 May 2022).
- Hansen, C.H.; Burian, S.J.; Dennison, P.E.; Williams, G.P. Spatiotemporal Variability of Lake Water Quality in the Context of Remote Sensing Models. Remote Sens. 2017, 9, 409. [Google Scholar] [CrossRef] [Green Version]
- OLCI L2 ATBD. Ocean Colour Turbid Water. S3-L2-SD-03-C11-GKSS-ATBD. Is. 2.1. 15/07/2010. Ver. 2.1. Available online: https://sentinel.esa.int/documents/247904/349589/OLCI_L2_ATBD_Ocean_Colour_Turbid_Water.pdf (accessed on 30 May 2022).
- Martins, V.S.; Barbosa, C.C.F.; de Carvalho, L.A.S.; Jorge, D.S.F.; Lobo, F.d.L.; Novo, E.M.L. Assessment of atmospheric correction methods for sentinel-2 MSI images applied to Amazon floodplain lakes. Remote Sens. 2017, 9, 322. [Google Scholar] [CrossRef] [Green Version]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pixel Number | 10 | 20 | 30 | 40 | 50 | 60 |
| Chl a range, mg/m3 | 46.3–74.6 | 27.6–44.0 | 63.9–232.0 | 34.4–97.6 | 14.3–32.2 | 14.1–30.8 |
| Chl a averaged in pixel | 58.4 | 33.9 | 133.6 | 62.6 | 26.2 | 25.3 |
| Pixel Number | 70 | 80 | 90 | 100 | 110 | 120 |
| Chl a range, mg/m3 | 30.1–47.4 | 10.4–20.1 | 13.7–38.9 | 23.0–35.2 | 55.0–118.2 | 65.9–264.1 |
| Chl a averaged in pixel | 35.2 | 16.1 | 23.8 | 29.6 | 74.7 | 104.4 |
| Pixel Number | B1 (400) | B2 (412) | B3 (442) | B4 (490) | B5 (510) | B6 (560) | B7 (620) | B8 (665) | B9 (674) | B10 (681) | B11 (709) | B12 (754) |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Variation coefficient, % | ||||||||||||
| 10 | 26.2 | 23.2 | 14.7 | 11.9 | 10.7 | 8.8 | 4.8 | 5.2 | 4.4 | 4.1 | 10.5 | 25.3 |
| 20 | 20.3 | 16.0 | 7.3 | 5.8 | 6.0 | 7.2 | 3.6 | 4.2 | 3.1 | 3.6 | 9.8 | 16.3 |
| 30 | 37.6 | 35.4 | 23.4 | 19.5 | 18.8 | 19.5 | 8.8 | 10.7 | 9.2 | 9.7 | 34.3 | 55.3 |
| 40 | 33.1 | 32.6 | 24.5 | 21.0 | 20.2 | 19.0 | 9.9 | 11.3 | 9.5 | 9.7 | 24.3 | 37.7 |
| 50 | 41.6 | 29.5 | 17.6 | 16.5 | 17.4 | 20.4 | 8.2 | 10.1 | 7.1 | 7.7 | 31.4 | 74.2 |
| 60 | 19.0 | 17.4 | 11.7 | 14.2 | 16.3 | 20.0 | 10.0 | 11.8 | 9.9 | 9.3 | 29.0 | 68.8 |
| 70 | 33.8 | 25.8 | 12.9 | 11.8 | 12.8 | 14.6 | 8.1 | 9.3 | 7.5 | 8.0 | 19.5 | 41.4 |
| 80 | 24.7 | 22.4 | 11.5 | 10.0 | 7.7 | 6.4 | 5.7 | 7.1 | 8.5 | 7.2 | 10.5 | 28.9 |
| 90 | 16.4 | 15.1 | 12.4 | 8.5 | 7.1 | 4.1 | 3.4 | 3.4 | 3.4 | 3.4 | 5.0 | 16.0 |
| 100 | 5.9 | 4.2 | 3.1 | 2.3 | 1.9 | 3.5 | 1.0 | 1.9 | 1.3 | 1.0 | 5.9 | 10.7 |
| 110 | 37.3 | 32.2 | 19.0 | 17.4 | 16.8 | 14.9 | 7.8 | 8.7 | 6.9 | 7.0 | 22.1 | 44.6 |
| 120 | 88.6 | 82.4 | 61.5 | 49.5 | 45.0 | 20.9 | 36.1 | 30.4 | 29.1 | 30.3 | 60.7 | 115.2 |
| Pixel Number | Track Number | Time Delay, Min | Chl a, mg/m3 | Quantity of Measurements in Pixel | ||
|---|---|---|---|---|---|---|
| Min | Average | Max | ||||
| 1* | 2 | 25 | 14.2 | 20.2 | 25.2 | 35 |
| 4 | 22.3 | 30.5 | 46.5 | 38 | ||
| 2* | 1 | 74 | 33.4 | 75.7 | 204.7 | 33 |
| 4 | 30.3 | 44.4 | 71.8 | 39 | ||
| 3* | 1 | 76 | 30.1 | 52.8 | 65.3 | 41 |
| 4 | 25.0 | 33.1 | 41.4 | 63 | ||
| 4* | 1 | 78 | 35.5 | 45.8 | 70.5 | 77 |
| 4 | 28.8 | 49.5 | 91.3 | 66 | ||
| 5* | 1 | 80 | 32.9 | 39.9 | 44.7 | 36 |
| 4 | 24.9 | 32.8 | 40.2 | 34 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Molkov, A.; Fedorov, S.; Pelevin, V. Toward Atmospheric Correction Algorithms for Sentinel-3/OLCI Images of Productive Waters. Remote Sens. 2022, 14, 3663. https://doi.org/10.3390/rs14153663
Molkov A, Fedorov S, Pelevin V. Toward Atmospheric Correction Algorithms for Sentinel-3/OLCI Images of Productive Waters. Remote Sensing. 2022; 14(15):3663. https://doi.org/10.3390/rs14153663
Chicago/Turabian StyleMolkov, Aleksandr, Sergei Fedorov, and Vadim Pelevin. 2022. "Toward Atmospheric Correction Algorithms for Sentinel-3/OLCI Images of Productive Waters" Remote Sensing 14, no. 15: 3663. https://doi.org/10.3390/rs14153663
APA StyleMolkov, A., Fedorov, S., & Pelevin, V. (2022). Toward Atmospheric Correction Algorithms for Sentinel-3/OLCI Images of Productive Waters. Remote Sensing, 14(15), 3663. https://doi.org/10.3390/rs14153663