
Wafer-Level Vacuum-Packaged Electric Field Microsensor: Structure Design, Theoretical Model, Microfabrication, and Characterization

 ,
,
Abstract
:1. Introduction
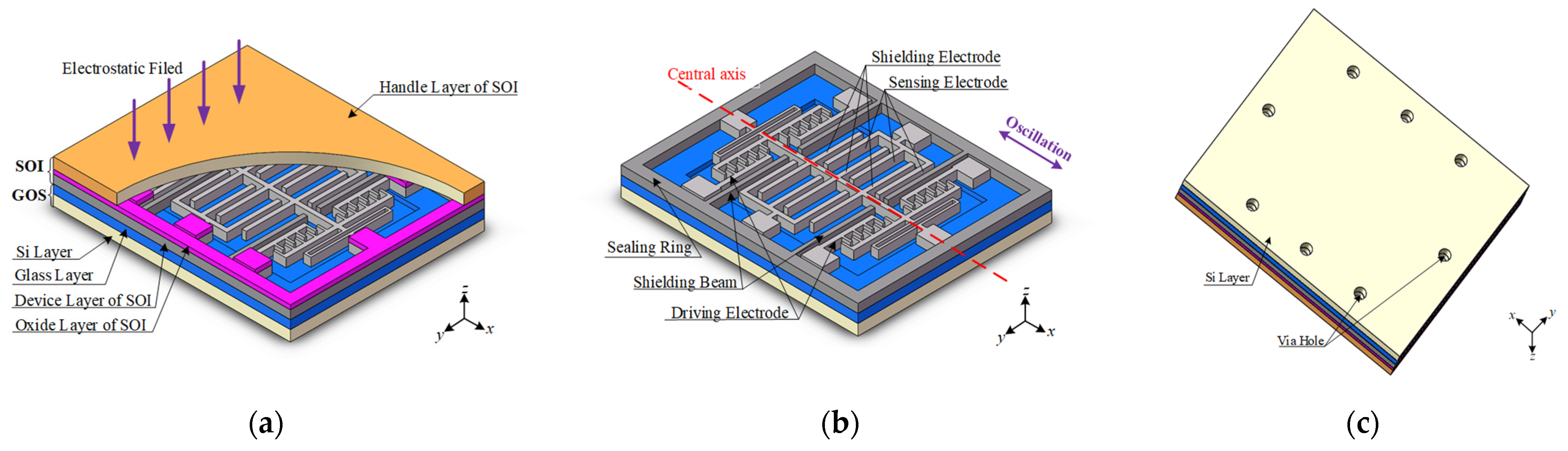
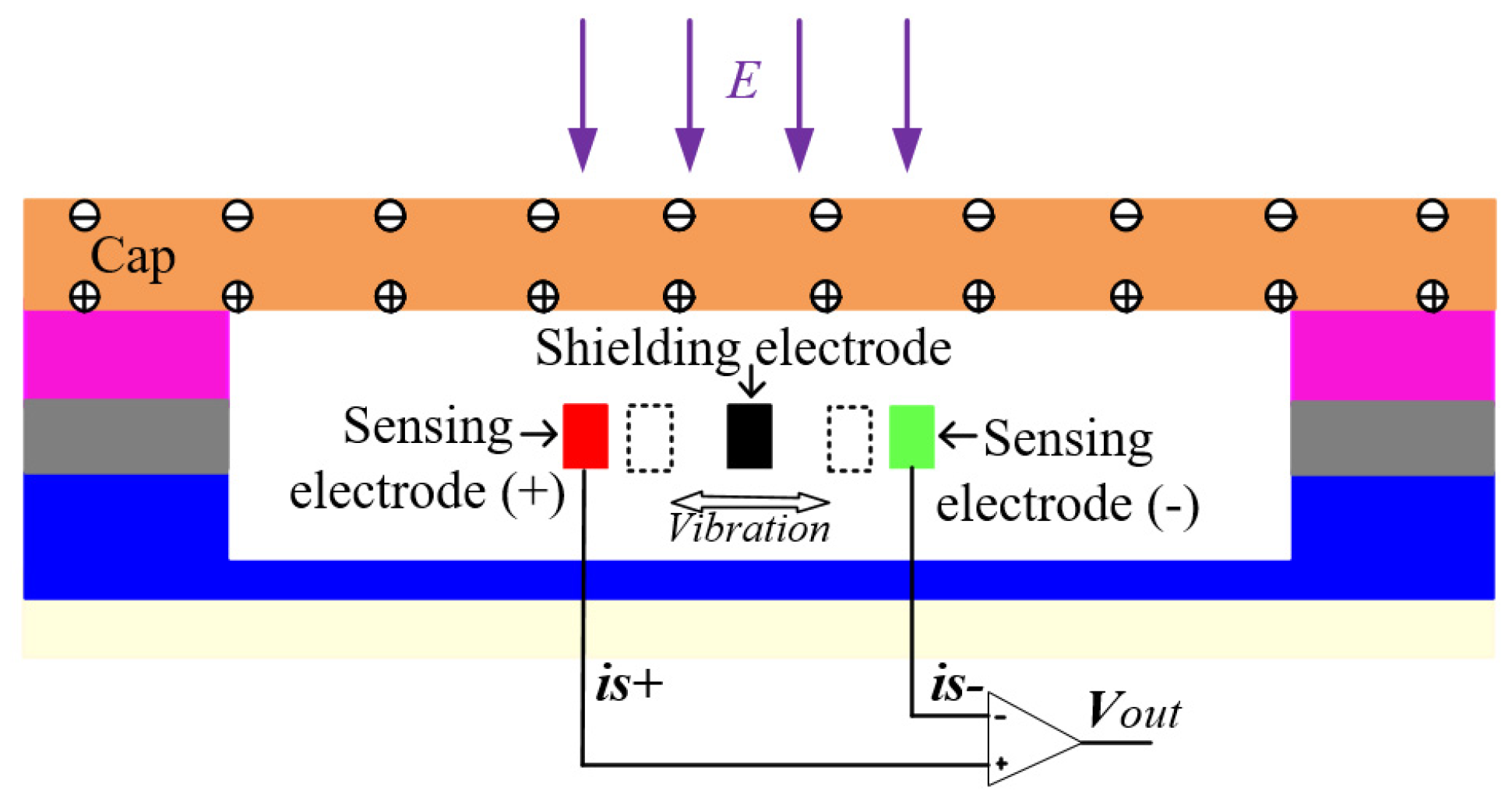
2. Structure Design and Working Principle
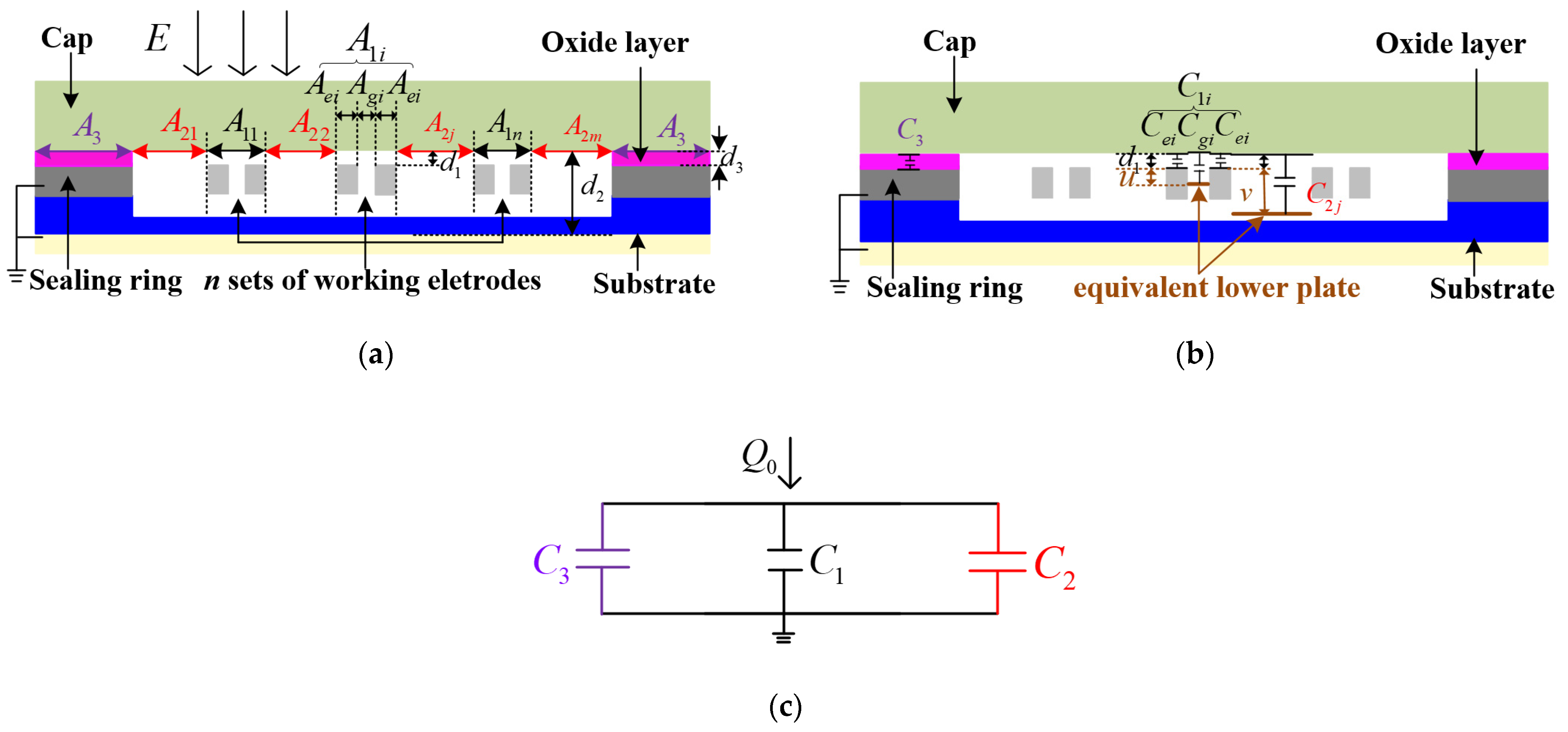
3. Theoretical Model
4. Analysis of Structural Parameters and Simulation
4.1. Gap between Cap and Working Electrodes
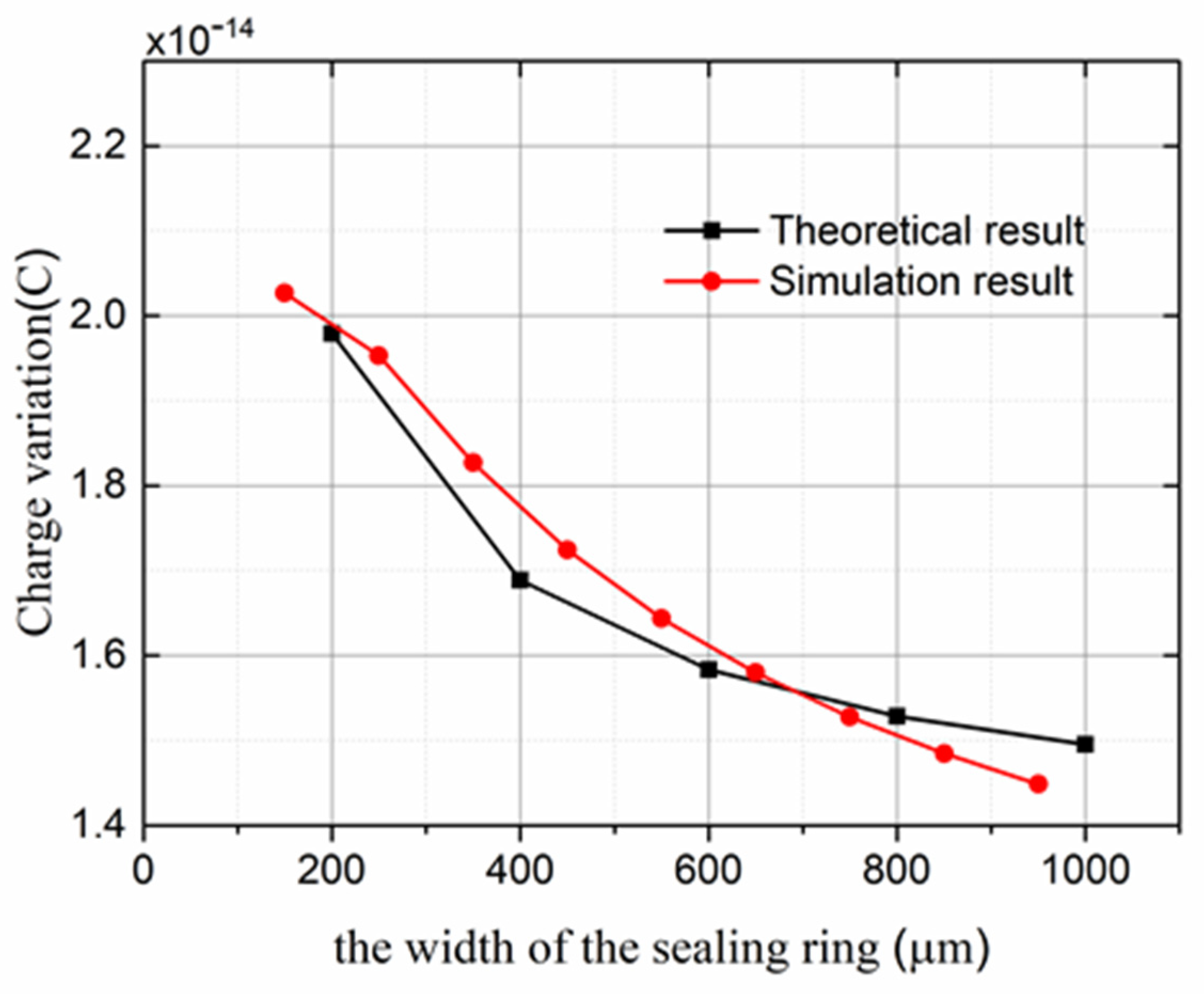
4.2. Width of the Sealing Ring
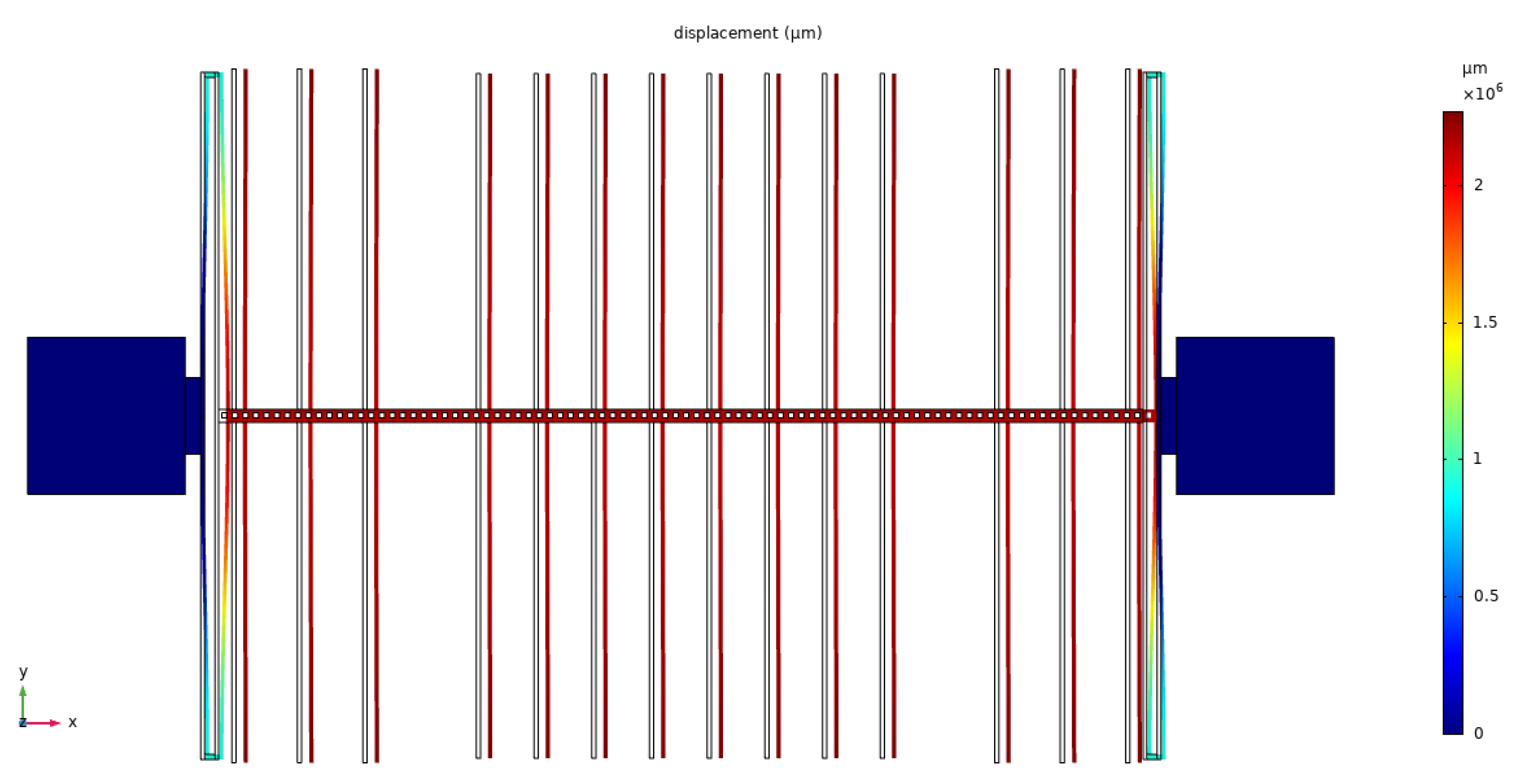
4.3. Resonant-Mode Simulation
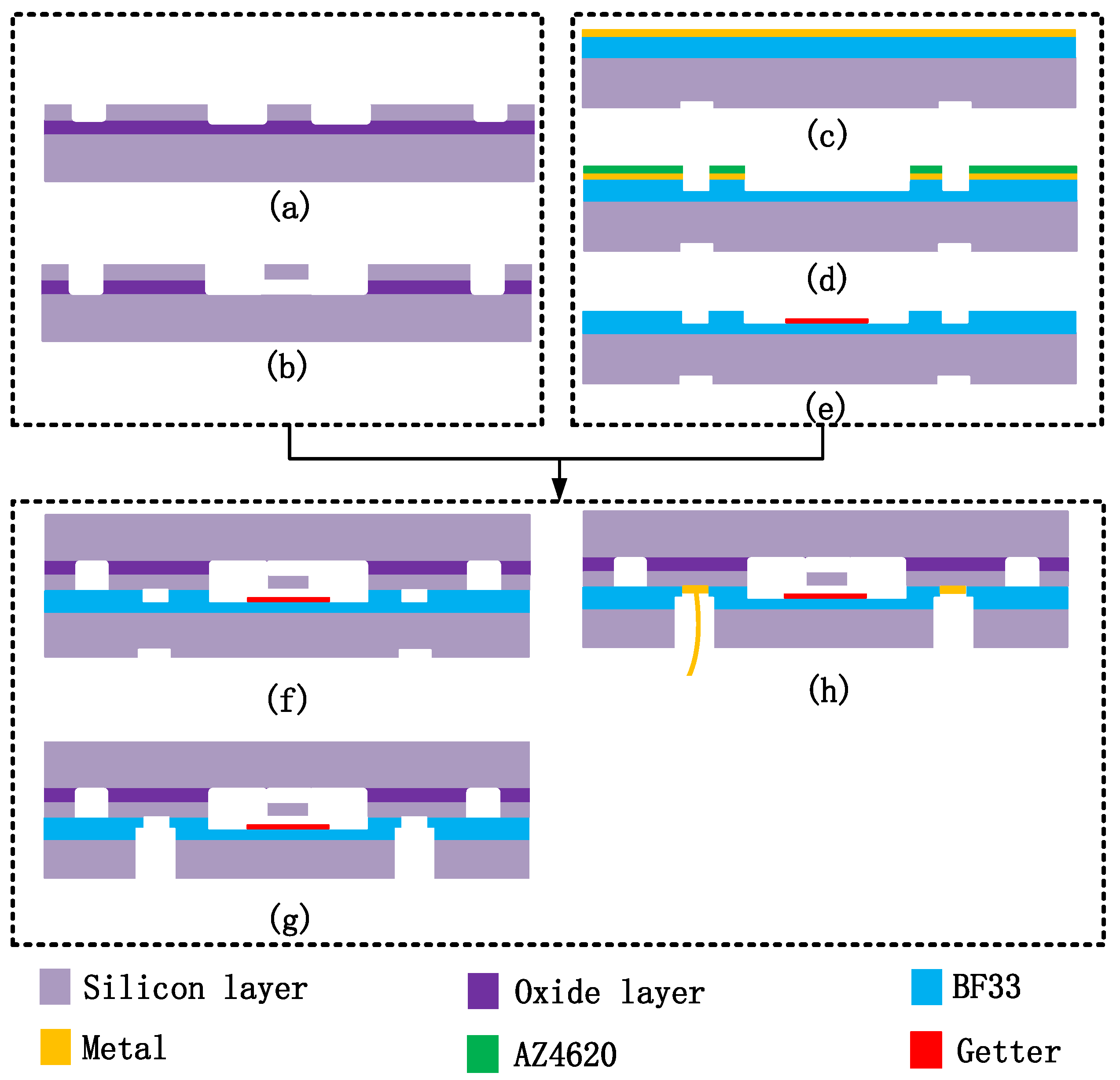
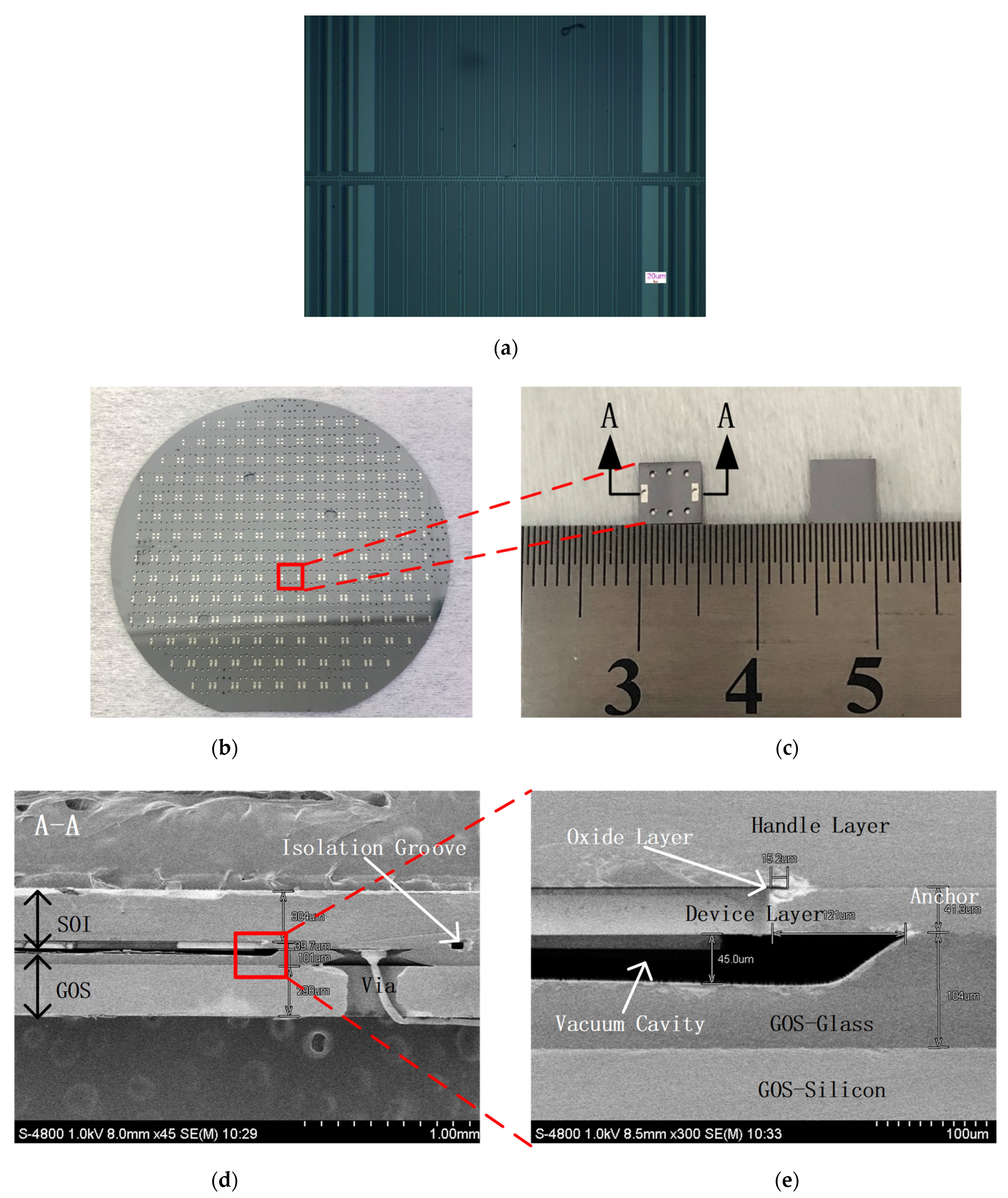
5. Device Fabrication
6. Experimental Results
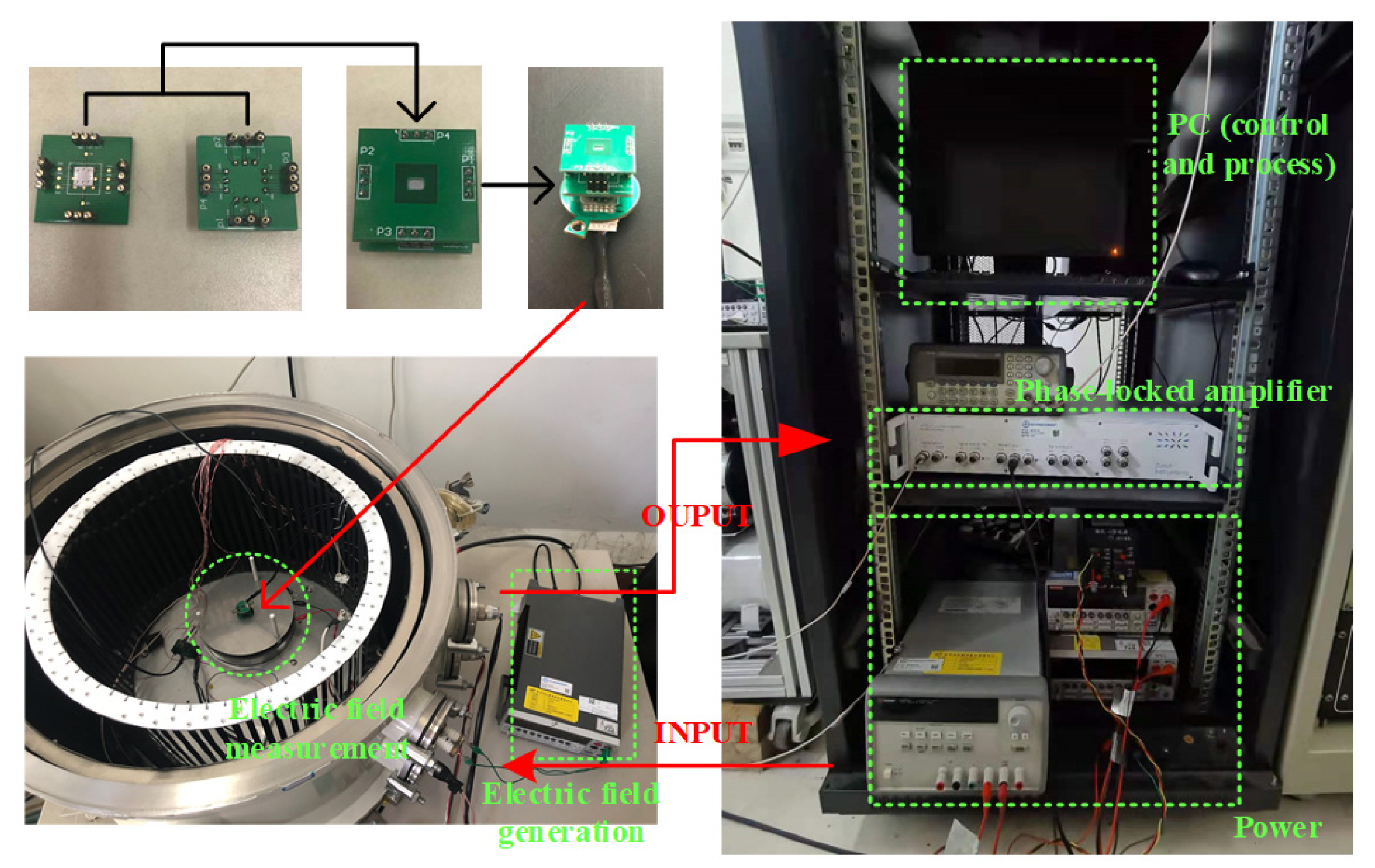
6.1. Experimental Setup
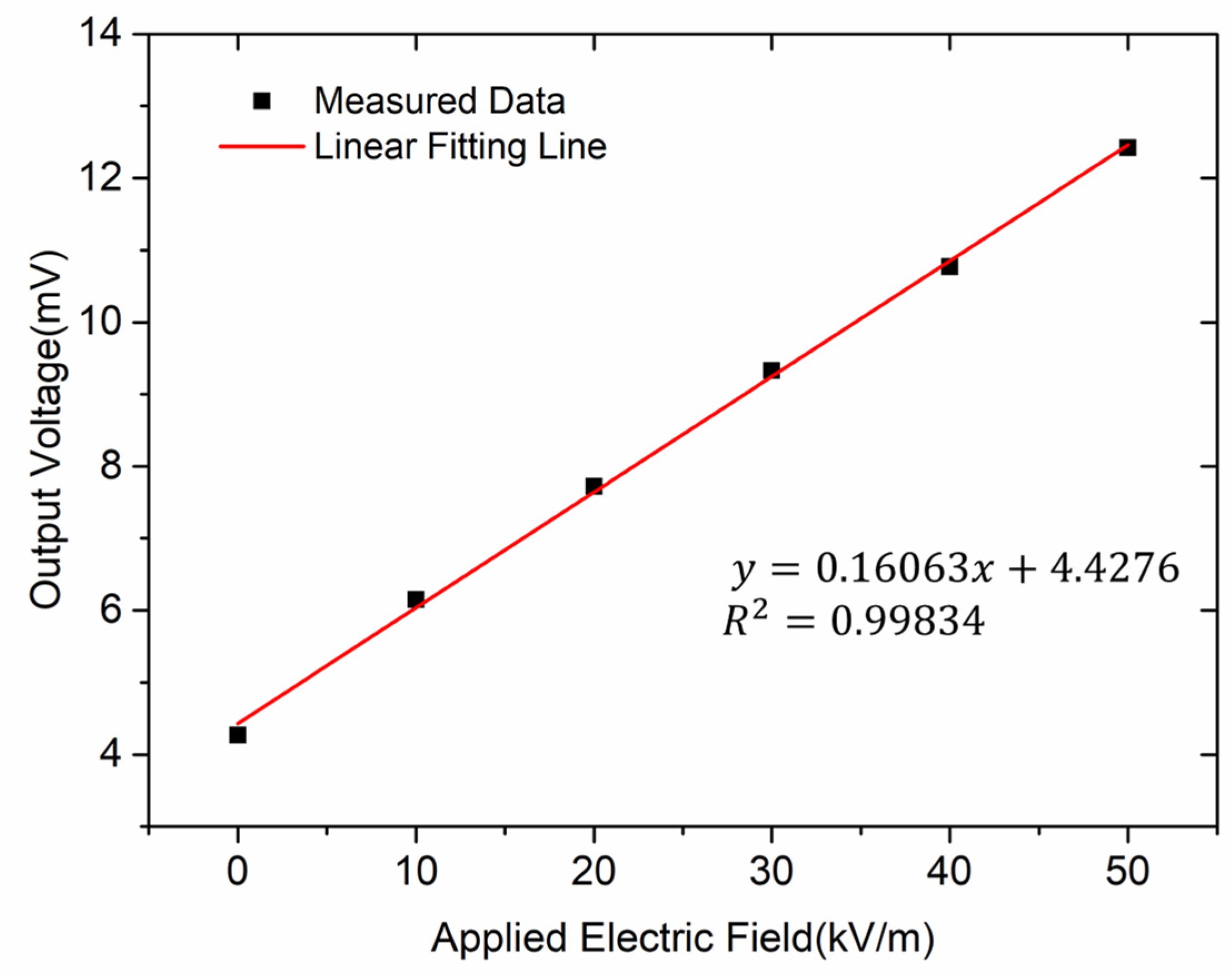
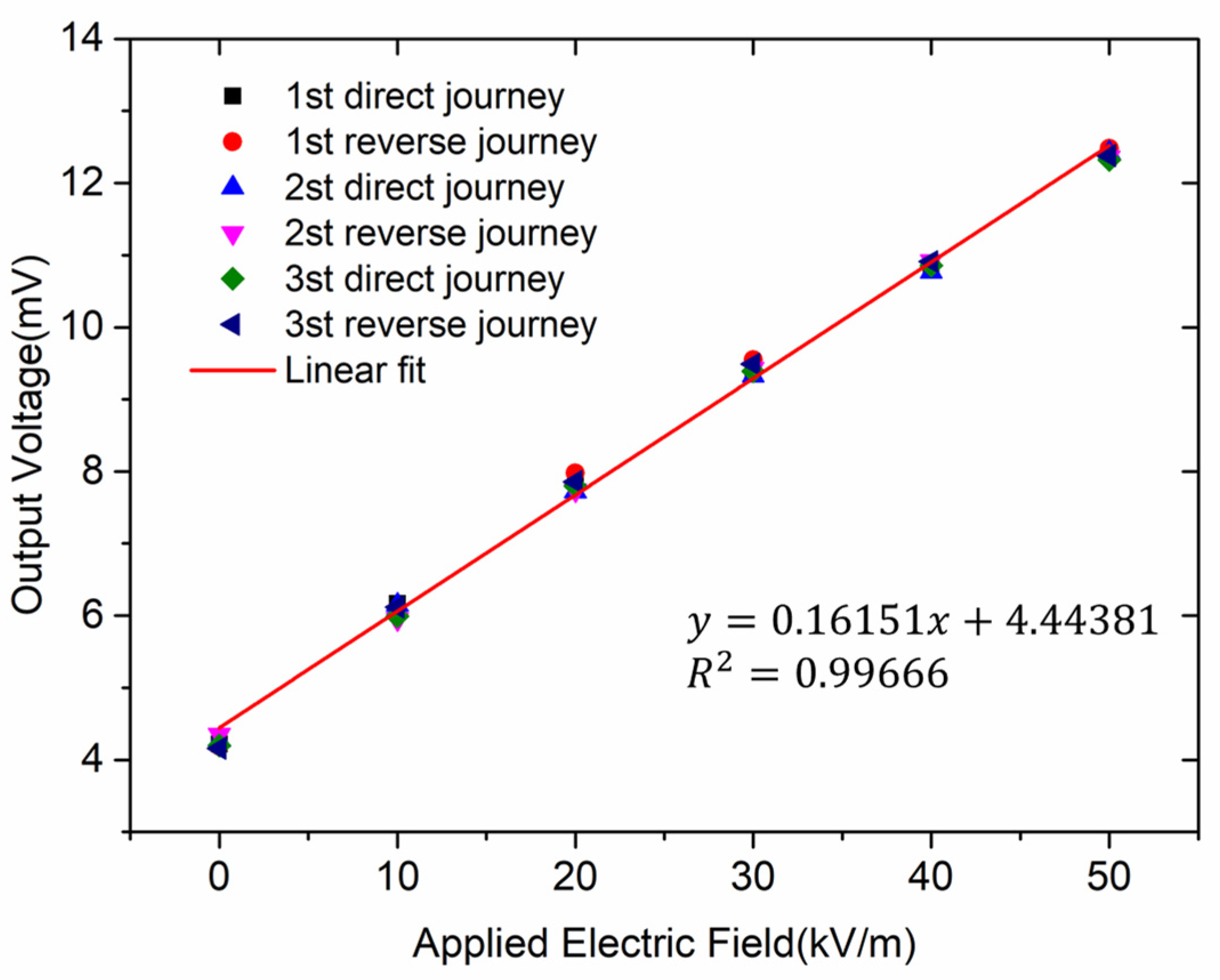
6.2. Characterization Results
7. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Vaillancourt, G.H.; Carignan, S.; Jean, C. Experience with the detection of faulty composite insulators on high-voltage power lines by the electric field measurement method. IEEE Trans. Power Deliv. 1998, 13, 661–666. [Google Scholar] [CrossRef]
- Kirkham, H. On the measurement of stationary electric fields in air. In Proceedings of the Digest Conference on Precision Electromagnetic Measurements, Ottawa, ON, Canada, 16–21 June 2002; pp. 524–525. [Google Scholar]
- Barthod, C.; Passard, M.; Bouillot, J.; Galez, C.; Farzaneh, M.C. High electric field measurement and ice detection using a safe probe near power installations. Sens. Actuators A 2004, 113, 140–146. [Google Scholar] [CrossRef]
- Montanya, J.; Bergas, J.; Hermoso, B. Electric field measurements at ground level as a basis for lightning hazard warning. J. Electrost. 2004, 60, 241–246. [Google Scholar] [CrossRef]
- Tant, P.; Bolsens, B.; Sels, T.; Dommelen, D.V.; Driesen, J.; Belmans, R. Design and Application of a Field Mill as a High-Voltage DC Meter. IEEE Trans. Instrum. Meas. 2007, 56, 1459–1464. [Google Scholar] [CrossRef]
- Yury, P.; Srinivas, S. Electric Field Encephalography as a Tool for Functional Brain Research: A Modeling Study. PLoS ONE 2013, 8, e67692. [Google Scholar]
- Hsu, C.H.; Muller, R.S. Micromechanical electrostatic voltmeter. In Proceedings of the 1991 International Conference on Solid-State Sensors and Actuators, San Francisco, CA, USA, 24–27 June 1991; pp. 659–662. [Google Scholar]
- Riehl, P.S.; Scott, K.L.; Muller, R.S.; Howe, R.T.; Yasaitis, J.A. Electrostatic charge and field sensors based on micromechanical resonators. J. Microelectromech. Syst. 2003, 12, 577–589. [Google Scholar] [CrossRef]
- Bahreyni, B.; Wijeweera, G.; Shafai, C.; Rajapakse, A. Analysis and design of a micromachined electric-field sensor. J. Microeletromech. Syst. 2008, 17, 31–36. [Google Scholar] [CrossRef]
- Yang, P.; Peng, C.; Zhang, H.; Liu, S.; Fang, D.; Xia, S. A high sensitivity soi electric-field sensor with novel comb-shaped microelectrodes. In Proceedings of the 2011 16th International Solid-State Sensors, Actuators and Microsystems Conference, Beijing, China, 5–9 June 2011; pp. 1034–1037. [Google Scholar]
- Yang, P.; Peng, C.; Fang, D.; Wen, X.; Xia, S. Design, fabrication and application of an SOI-based resonant electric field microsensor with coplanar comb-shaped electrodes. J. Micromech. Microeng. 2013, 23, 055002. [Google Scholar] [CrossRef]
- Chu, Z.; Peng, C.; Ren, R.; Ling, B.; Zhang, Z.; Lei, H.; Xia, S. A high sensitivity electric field microsensor based on torsional resonance. Sensors 2018, 18, 286. [Google Scholar] [CrossRef]
- Ling, B.; Peng, C.; Ren, R.; Chu, Z.; Zhang, Z.; Lei, H.; Xia, S. Design, fabrication and characterization of a mems-based three-dimensional electric field sensor with low cross-axis coupling interference. Sensors 2018, 18, 870. [Google Scholar] [CrossRef]
- Liu, X.; Wang, Z.; Wu, Z.; Gao, Y.; Peng, S.; Rem, R.; Zheng, F.; Lv, Y.; Yang, P.; Wen, X.; et al. Enhanced Sensitivity and Stability of a Novel Resonant MEMS Electric Field Sensor Based on Closed-Loop Feedback. IEEE Sens. J. 2021, 21, 22536–22543. [Google Scholar] [CrossRef]
- Kobayashi, T. Microelectromechanical Systems-Based Electrostatic Field Sensor Using Pb(Zr,Ti)O3 Thin Films. Jpn. J. Appl. Phys. 2014, 47, 7533–7536. [Google Scholar] [CrossRef]
- Zhang, H.; Fang, D.; Yang, P.; Peng, C.; Wen, X.; Xia, S. Humidity-induced charge leakage and field attenuation in electric field microsensors. Sensors 2012, 4, 5105–5115. [Google Scholar] [CrossRef] [PubMed]
- Wen, X.; Yang, P.; Zhang, Z.; Chu, Z.; Peng, C.; Liu, Y.; Wu, S.; Zhang, B.; Zheng, F. Resolution-Enhancing Structure for the Electric Field Microsensor Chip. Micromachines 2021, 12, 936. [Google Scholar] [CrossRef] [PubMed]
- Wen, X.; Yang, P.; Chu, Z.; Peng, C.; Liu, Y.; Wu, S. Toward atmospheric electricity research: A low-cost, highly sensitive and robust balloon-borne electric field sounding sensor. IEEE Sens. J. 2021, 21, 13405–13416. [Google Scholar] [CrossRef]
- Gooch, R.; Schimert, T.; McCardel, W.; Ritchey, B. Wafer-level vacuum packaging for MEMS. J. Vac. Sci. Technol. A Vac. Surf. Film. 1999, 17, 2295–2299. [Google Scholar] [CrossRef]
- Sparks, D.; Massoud-Ansari, S.; Najafi, N. Long-term evaluation of hermetically glass frit sealed silicon to pyrex wafers with feedthroughs. J. Micromech. Microeng. 2005, 15, 1560–1564. [Google Scholar] [CrossRef]
- Merdassi, A.; Yang, P.; Chodavarapu, V. A wafer-level vacuum encapsulated capacitive accelerometer fabricated in an unmodified commercial MEMS process. Sensors 2015, 15, 7349–7359. [Google Scholar] [CrossRef]
- Akashi, T.; Funabashi, H.; Takagi, H.; Hata, Y.; Fujiyoshi, M. Wafer-level hermetic vacuum packaging by bonding with a copper–tin thin film sealing ring. J. Micromech. Microeng. 2018, 28, 044002. [Google Scholar] [CrossRef]
- Wang, X.; Bleiker, S.J.; Antelius, M.; Stemme, G.; Niklaus, F. Wafer-level vacuum packaging enabled by plastic deformation and low-temperature welding of copper sealing rings with a small footprint. J. Microelectromech. Syst. 2017, 26, 357–365. [Google Scholar] [CrossRef]
- Luo, Z.; Chen, D.; Wang, J.; Li, Y.; Chen, J. A high-Q resonant pressure microsensor with through-glass electrical interconnections based on wafer-level MEMS vacuum packaging. Sensors 2014, 14, 24244–24257. [Google Scholar] [CrossRef] [PubMed]
- Xie, B.; Xing, Y.; Wang, Y.; Chen, J.; Chen, D.; Wang, J. A lateral differential resonant pressure microsensor based on SOI-glass wafer-level vacuum packaging. Sensors 2015, 15, 24257–24268. [Google Scholar] [CrossRef] [PubMed]
- Uppalapati, B.; Ahamed, M.J.; Chodavarapu, V.P. Design and analysis of wafer-level vacuum-encapsulated disk resonator gyroscope using a commercial MEMS process. In Proceedings of the 2017 IEEE National Aerospace and Electronics Conference (NAECON), Dayton, OH, USA, 27–30 June 2017; pp. 108–112. [Google Scholar]
- Mahmood, M.S.; Çelik-Butler, Z. Wafer-level vacuum-packaged flexible and bendable micro accelerometer. IEEE Sens. J. 2018, 18, 4089–4096. [Google Scholar] [CrossRef]
- Li, Y.; Cheng, C.; Lu, Y.; Xie, B.; Chen, J.; Wang, J.; Chen, D. A High-Sensitivity Resonant Differential Pressure Microsensor Based on Bulk Micromachining. IEEE Sens. J. 2021, 21, 8927–8934. [Google Scholar] [CrossRef]
- Llovera, P.; Molinie, P.; Soria, A.; Quijano, A. Measurements of electrostatic potentials and electric fields in some industrial applications: Basic principles. J. Electrost. 2009, 67, 457–461. [Google Scholar] [CrossRef]
- Lorrain, P. Electromagnetic Fields and Waves; Prentice Hall: Hoboken, NJ, USA, 2013. [Google Scholar]
- Yang, P.; Wen, X.; Chu, Z.; Ni, X.; Peng, C. AC/DC fields demodulation methods of resonant electric field microsensor. Micromachines 2020, 11, 511. [Google Scholar] [CrossRef]
- Xie, B.; Xing, Y.; Wang, Y.; Chen, D.; Chen, J.; Wang, J. Vacuum-packaged Resonant Pressure Sensor with Dual Resonators for High Sensitivity and Linearity. Procedia Eng. 2015, 120, 194–199. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Structural Parameters | Value |
|---|---|
| 2 µm | |
| 250 µm | |
| Thickness of the structure layer | 40 µm |
| 9 µm | |
| Length of the working electrodes | 635 µm |
| Gap between shielding electrode and | 15 µm |
| 75 µm | |
| Number of working electrodes | 8 × 2 |
| Width of driving electrodes | 9 µm |
| Length of driving electrodes | 635 µm |
| Number of driving electrodes | 6 × 2 |
| Reported EFM | Year | Driving Signals | Quality Factor | Feedthrough |
|---|---|---|---|---|
| Riehl [8] | 2003 | DC 30 V and AC 2.5 VP | - | 19.1 mV |
| Yang [11] | 2011 | DC 20 V and AC 1 VP | 60 | 13.9 mV |
| Chu [12] | 2018 | DC 30 V and AC 15 VP | 11 | - |
| Ling [13] | 2019 | DC 20 V and AC 1 VP | - | - |
| This work | 2022 | DC 5 V and AC 0.05 VP | 5738 | 4.2 mV |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, J.; Xia, S.; Peng, C.; Wu, Z.; Chu, Z.; Zhang, Z.; Lei, H.; Zheng, F.; Zhang, W. Wafer-Level Vacuum-Packaged Electric Field Microsensor: Structure Design, Theoretical Model, Microfabrication, and Characterization. Micromachines 2022, 13, 928. https://doi.org/10.3390/mi13060928
Liu J, Xia S, Peng C, Wu Z, Chu Z, Zhang Z, Lei H, Zheng F, Zhang W. Wafer-Level Vacuum-Packaged Electric Field Microsensor: Structure Design, Theoretical Model, Microfabrication, and Characterization. Micromachines. 2022; 13(6):928. https://doi.org/10.3390/mi13060928
Chicago/Turabian StyleLiu, Jun, Shanhong Xia, Chunrong Peng, Zhengwei Wu, Zhaozhi Chu, Zhouwei Zhang, Hucheng Lei, Fengjie Zheng, and Wei Zhang. 2022. "Wafer-Level Vacuum-Packaged Electric Field Microsensor: Structure Design, Theoretical Model, Microfabrication, and Characterization" Micromachines 13, no. 6: 928. https://doi.org/10.3390/mi13060928
APA StyleLiu, J., Xia, S., Peng, C., Wu, Z., Chu, Z., Zhang, Z., Lei, H., Zheng, F., & Zhang, W. (2022). Wafer-Level Vacuum-Packaged Electric Field Microsensor: Structure Design, Theoretical Model, Microfabrication, and Characterization. Micromachines, 13(6), 928. https://doi.org/10.3390/mi13060928