

Magnetic Flux Concentration Technology Based on Soft Magnets and Superconductors



Abstract
:1. Introduction
2. Simulation and Results
2.1. Soft Magnetic Flux Concentrators
2.1.1. Principles and Simulation Model
2.1.2. Simulation Results
2.2. Superconducting FC
2.2.1. Principle and Simulation Model
2.2.2. Simulation Results
3. Experimental Results and Discussion
4. Conclusions
- 1
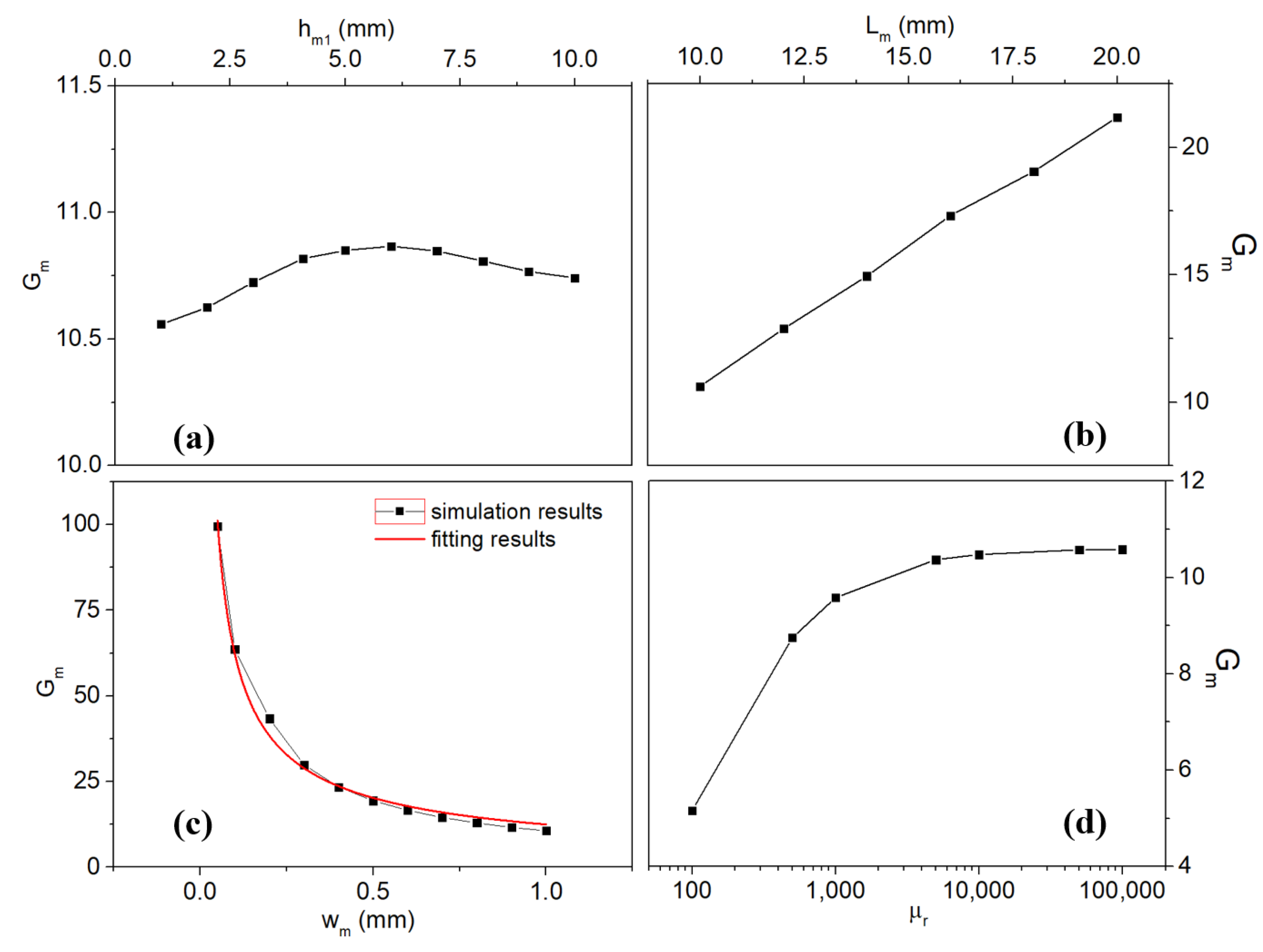
- The main factors affecting the magnetic field amplification performance of the soft magnetic FC include permeability, demagnetizing factor, and gap width. First, the magnetic field amplification factor of the soft magnetic FC increases with the addition in permeability and starts to saturate when the permeability exceeds 5000. Secondly, enlarging the aspect ratio of the soft magnetic FC can effectively reduce the demagnetization factor and improve the magnetic field gain factor. Finally, the air gap should be minimized to reduce magnetic leakage. In practical applications, the size and gap width of the soft magnetic FC should be reasonably designed according to the size requirements of the sensor and the magnetic-sensitive element.
- 2
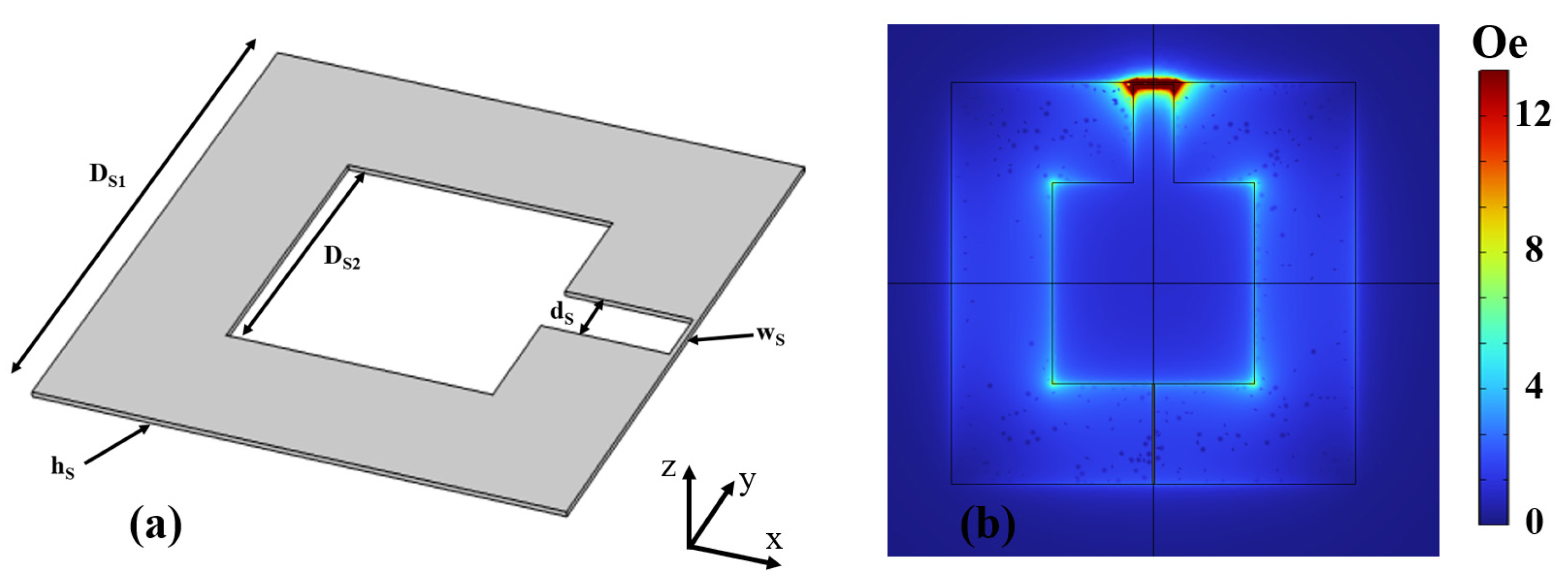
- The main factors affecting the magnetic field amplification performance of the superconducting FC include the effective area, the self-inductance of the superconducting loop, and the width of the constriction. With the external dimensions of the superconducting FC determined, the ratio of the inner to outer radii of the superconducting loop should be set to 1:2, while minimizing the width of the constriction as much as possible. It should be noted that reducing the width of the constriction decreases the magnetic field amplification area and reduces the magnetic field range. In practical applications, the width of the constriction and other parameters should be reasonably designed according to the size requirements of the sensor and the magnetic-sensitive element (e.g., the size of the TMR junction region).
- 3
- At the same size, the superconducting FC exhibits superior magnetic field amplification performance. Additionally, since the superconducting FC operates in a low-temperature environment, the thermal noise of the magnetic-sensitive element (TMR) can be effectively reduced, thereby enhancing magnetic field resolution. However, it is important to note that the superconducting FC requires low-temperature cooling equipment (such as refrigerators or liquid nitrogen). Therefore, in practical applications, the choice of flux concentrator should be made based on the specific application scenarios.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Lenz, J.; Edelstein, A.S. Magnetic sensors and their applications. IEEE Sens. J. 2006, 6, 631–649. [Google Scholar] [CrossRef]
- Diaz-Michelena, M. Small Magnetic Sensors for Space Applications. Sensors 2009, 9, 2271–2288. [Google Scholar] [CrossRef]
- Zhou, L.; Wu, F.; Jolfaei, M.A.; Hobson, S.; Davis, C.L. Non-destructive characterisation of pearlitic steel microstructure at room temperature and in-situ microstructure development during heat treatment using electromagnetic sensors. NDT E Int. 2024, 147, 103199. [Google Scholar] [CrossRef]
- Li, W.; Wang, J.L. Magnetic Sensors for Navigation Applications: An Overview. J. Navigation. 2014, 67, 263–275. [Google Scholar] [CrossRef]
- Chiang, C.Y.; Jeng, J.T.; Lai, B.L.; Luong, V.S.; Lu, C. Tri-axis magnetometer with in-plane giant magnetoresistance sensors for compass application. J. Appl. Phys. 2015, 177, 17A321. [Google Scholar] [CrossRef]
- Petrenko, M.V.; Pazgalev, A.S.; Vershovskii, A.K. All-Optical Nonzero-Field Vector Magnetic Sensor for Magnetoencephalography. Phys. Rev. Appl. 2023, 20, 024001. [Google Scholar] [CrossRef]
- Morgan, W.M. Colloquium: Quantum limits to the energy resolution of magnetic field sensors. Rev. Mod. Phys. 2020, 92, 021001. [Google Scholar]
- Deeter, M.N. Fiber-Optic Faraday-Effect Magnetic-Field Sensor Based on Flux Concentrators. Appl. Opt. 1996, 35, 154–157. [Google Scholar] [CrossRef]
- Schneider, M.; Castagnetti, R.; Allen, M.; Baltes, H. Integrated Flux Concentrator Improves CMOS Magnetotransistors. In Proceedings of the IEEE Micro Electro Mechanical Systems, Amsterdam, The Netherlands, 29 January–2 February 1995; pp. 151–156. [Google Scholar]
- Drljaca, P.M.; Vincent, F.; Besse, P.A.; Popović, R.S. Design of Planar Magnetic Concentrators for High Sensitivity Hall Device. Sens. Actuators A 2002, 97, 10–14. [Google Scholar] [CrossRef]
- Zheng, C.; Zhu, K.; De Freitas, S.C.; Chang, J.Y.; Davies, J.E.; Eames, P.; Freitas, P.P.; Kazakova, O.; Kim, C.G.; Leung, C.W.; et al. Magnetoresistive Sensor Development Roadmap. IEEE Trans. Magn. 2019, 10, 1109. [Google Scholar]
- He, G.; Zhang, Y.; Qian, L.; Xiao, G.; Zhang, Q.; Santamarina, J.C.; Patzek, T.W.; Zhang, X. Pico Tesla magnetic tunneling junction sensors integrated with double staged magnetic flux concentrators. Appl. Phys. Lett. 2018, 113, 242401. [Google Scholar] [CrossRef]
- Edelstein, A.S.; Fischer, G.A.; Pedersen, M.; Nowak, E.; Cheng, S.F.; Nordman, C.A. Progress toward a thousandfold reduction in 1/f noise in magnetic sensors using an ac microelectromechanical system flux concentrator. J. Appl. Phys. 2006, 99, 08B317. [Google Scholar] [CrossRef]
- Guedes, A.; Almeida, J.M.; Cardoso, S.; Ferreira, R.; Freitas, P.P. Improving magnetic field detection limits of spin valve sensors using magnetic flux guide concentrators. IEEE Trans. Magn. 2007, 43, 2376–2378. [Google Scholar] [CrossRef]
- Manceau, S.; Brun, T.; Fischer, J.; Ducruet, C.; Sabon, P.; Cavoit, C.; Jannet, G.; Pinçon, J.-L.; Prejbeanu, I.L.; Kretzschmar, M.; et al. Large amplification of the sensitivity of symmetric-response magnetic tunnel junctions with a high gain flux concentrator. Appl. Phys. Lett. 2023, 123, 082405. [Google Scholar] [CrossRef]
- Lamichhane, S.; Yang, Y.; Sokolov, A.; Yin, X.L.; Liu, Y.F.; Liou, S.H. Half bridge configurated magneto-resistive sensors with flux guide structure for enhancing sensitivity. Appl. Phys. Lett. 2024, 124, 212401. [Google Scholar] [CrossRef]
- Chaves, R.C.; Freitas, P.P.; Ocker, B.; Maass, W. Low frequency picotesla field detection using hybird MgO based tunnel sensors. Appl. Phys. Lett. 2007, 91, 102504. [Google Scholar] [CrossRef]
- Robbes, D.; Dolabdjian, C.; Saez, S.; Monfort, Y.; Kaiser, G.; Ciureanu, P. High sensitivity magnetic sensors. IEEE Trans. Appl. Supercond. 2001, 11, 629. [Google Scholar] [CrossRef]
- Pannetier, M.; Fermon, C.; Le Goff, G.; Simola, J.; Kerr, E. Femtotesla magnetic field measurement with magnetoresistive sensors. Science 2004, 304, 1648–1650. [Google Scholar] [CrossRef]
- Pannetier, M.; Polovy, H.; Sergeeva, C.N.; Cannies, G.; Fermon, C.; Parkkonen, L. Magnetocardiography with GMR-based sensors. J. Phys. Conf. Ser. 2011, 303, 012054. [Google Scholar] [CrossRef]
- Pannetier-Lecoeur, M.; Parkkonen, L.; Sergeeva-Chollet, N.; Polovy, H.; Fermon, C.; Fowley, C. Magnetocardiography with sensors based on giant magnetoresistance. Appl. Phys. Lett. 2011, 98, 153705. [Google Scholar] [CrossRef]
- Campiglio, P.; Caruso, L.; Paul, E.; Demonti, A.; Azizi-Rogeau, L.; Parkkonen, L.; Fermon, C.; Pannetier-Lecoeur, M. GMR-based sensors arrays for biomagnetic source imaging applications. Magnetics. IEEE Trans. Magn. 2012, 48, 3501–3504. [Google Scholar] [CrossRef]
- Sinibaldi, R.; De Luca, C.; Nieminen, J.O.; Galante, A.; Pizzella, V.; Sebastiani, P.; Pannetier-Lecoeur, M.; Manna, A.; Chiacchiaretta, P.; Tamburro, G.; et al. NMR detection at 8.9 mT with a GMR based sensor coupled to a superconducting Nb flux transformer. Prog. Electromagn. Res. 2013, 142, 389–408. [Google Scholar] [CrossRef]
- Dyvorne, H.; Fermon, C.; Pannetier, M.; Polovy, H.; Walliang, A.L. NMR with superconducting-GMR mixed sensors. IEEE Trans. Appl. Supercond. 2010, 19, 819. [Google Scholar] [CrossRef]
- Wu, Y.; Xiao, L.Y.; Hou, S.Z.; Gao, Z.S.; Han, L. High Tc TMR-Superconducting Mixed Sensor: Fabrication and Performance. IEEE Trans. Appl. Supercond. 2019, 29, 1800105. [Google Scholar] [CrossRef]
- Sun, K.; Yang, L.; Li, P.; Tao, J.; Zhang, X.; Ji, M.; Qiu, W.; Zhang, Q.; Hu, Y. A superconductor/TMR composite magnetic sensor for pico-Tesla magnetic field detection. AIP Adv. 2022, 12, 105003. [Google Scholar] [CrossRef]
- Yang, L.; Sun, K.; Tao, J.; Zhang, X.; Huang, D.; Pan, M.; Hu, J.; Qiu, W.; Ji, M.; Hu, Y.; et al. Superconducting magnetic flux transformation amplifier for the superconductor/magnetoresistance mixed magnetic sensor: Finite element simulation method and experimental verification study. Sens. Actuators A 2022, 342, 113658. [Google Scholar] [CrossRef]
- Yang, L.; Sun, K.; Pan, M.; Zhang, X.; Peng, J.; Hu, Y.; Qiu, W.; Li, P. The In-Plane Magnetic Field Measurement Method of SC/MR Mixed Sensor and Its Three-Axis Magnetic Sensor with Integrated Magnetic Concentrator. IEEE. Sens. J. 2023, 23, 240–246. [Google Scholar] [CrossRef]
- Sun, K.; Tao, J.; Yang, L.; Peng, J.; Li, P.; Pan, M.; Chen, D.; Huang, D.; Zhang, X.; Qiu, W.; et al. Vertical Magnetic Flux Concentrators for High-Sensitivity Superconductor/Magnetoresistance Composite Sensors. IEEE Sens. J. 2022, 22, 8460–8465. [Google Scholar] [CrossRef]
- Wu, Y.; Han, S.Y.; Xiao, L.Y.; Chen, J.M. TMR-high-temperature superconductor composite magnetic sensor and its performance optimization. Cryogenics 2024, 139, 103810. [Google Scholar] [CrossRef]
- Han, S.Y.; Wu, Y.; Xiao, L.Y.; Chen, J.M. Fabrication and performance enhancement of TMR-Superconducting composite magnetic sensors for weak magnetic field detection. Cryogenics 2024, 138, 103803. [Google Scholar] [CrossRef]
- Douine, B.; Male, G.; Lubin, T.; Mezani, S.; Leveque, J.; Berger, K. Improvement of YBCO superconductor magnetic shielding by using multiple bulks. J. Supercond. Novel Magn. 2014, 27, 903–990. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Dm1 | Dm2 | Lm | hm1 | hm2 | wm |
|---|---|---|---|---|---|---|
| Unit (mm) | 20 | 2 | 10 | 1 | 1 | 1 |
| Parameters | DS1 | DS2 | hs | ds | ws |
|---|---|---|---|---|---|
| Unit (mm) | 20 | 10 | 0.001 | 2 | 1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, Y.; Xiao, L.; Han, S.; Chen, J. Magnetic Flux Concentration Technology Based on Soft Magnets and Superconductors. Crystals 2024, 14, 747. https://doi.org/10.3390/cryst14080747
Wu Y, Xiao L, Han S, Chen J. Magnetic Flux Concentration Technology Based on Soft Magnets and Superconductors. Crystals. 2024; 14(8):747. https://doi.org/10.3390/cryst14080747
Chicago/Turabian StyleWu, Yue, Liye Xiao, Siyuan Han, and Jiamin Chen. 2024. "Magnetic Flux Concentration Technology Based on Soft Magnets and Superconductors" Crystals 14, no. 8: 747. https://doi.org/10.3390/cryst14080747
APA StyleWu, Y., Xiao, L., Han, S., & Chen, J. (2024). Magnetic Flux Concentration Technology Based on Soft Magnets and Superconductors. Crystals, 14(8), 747. https://doi.org/10.3390/cryst14080747