
NDVI Prediction of Mediterranean Permanent Grasslands Using Soil Moisture Products



Abstract
1. Introduction
2. Materials and Methods
2.1. Study Area
2.2. Soil Moisture Model
2.3. Soil Moisture Model Calibration and Validation
2.4. NDVI Forecasting Models
3. Results
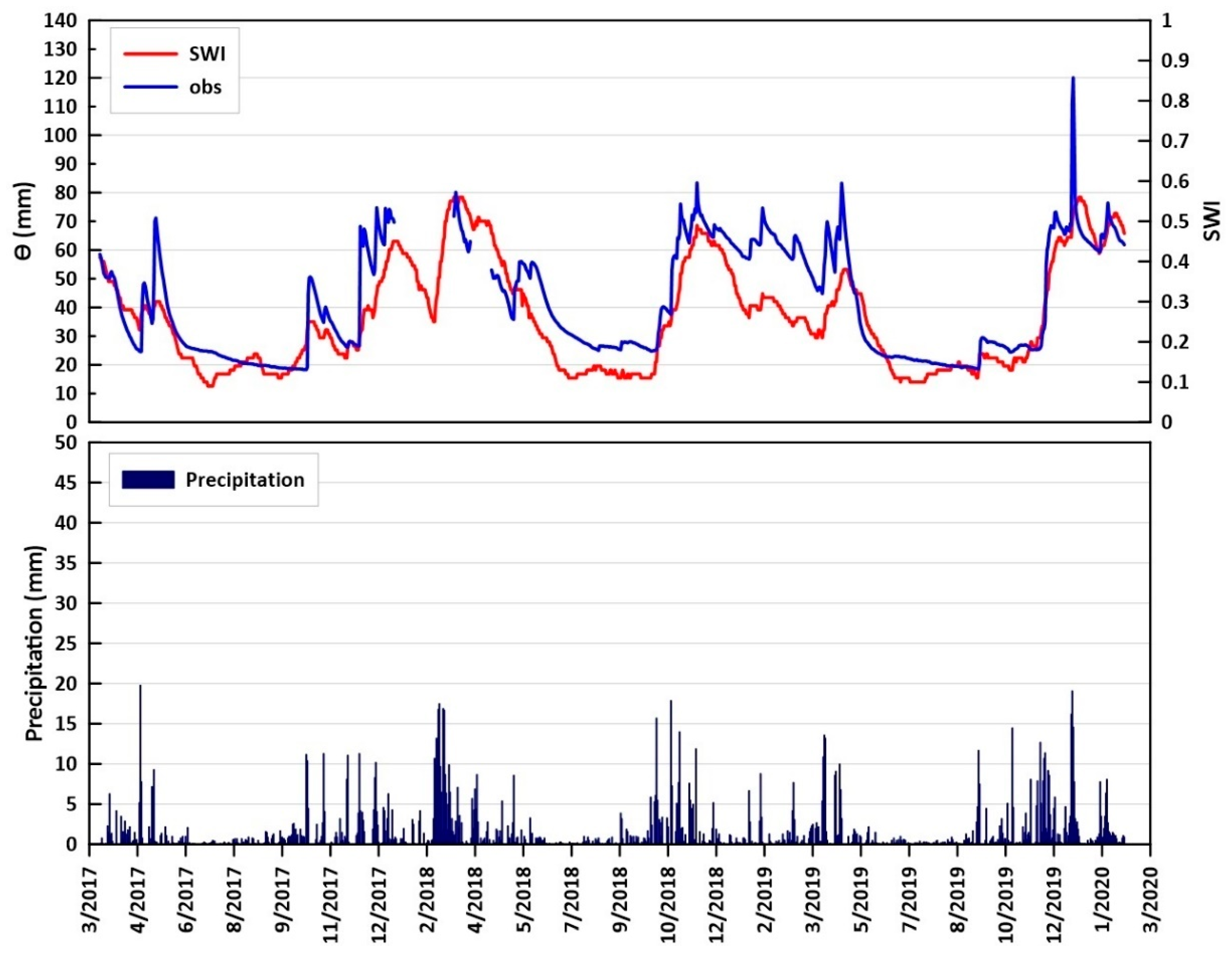
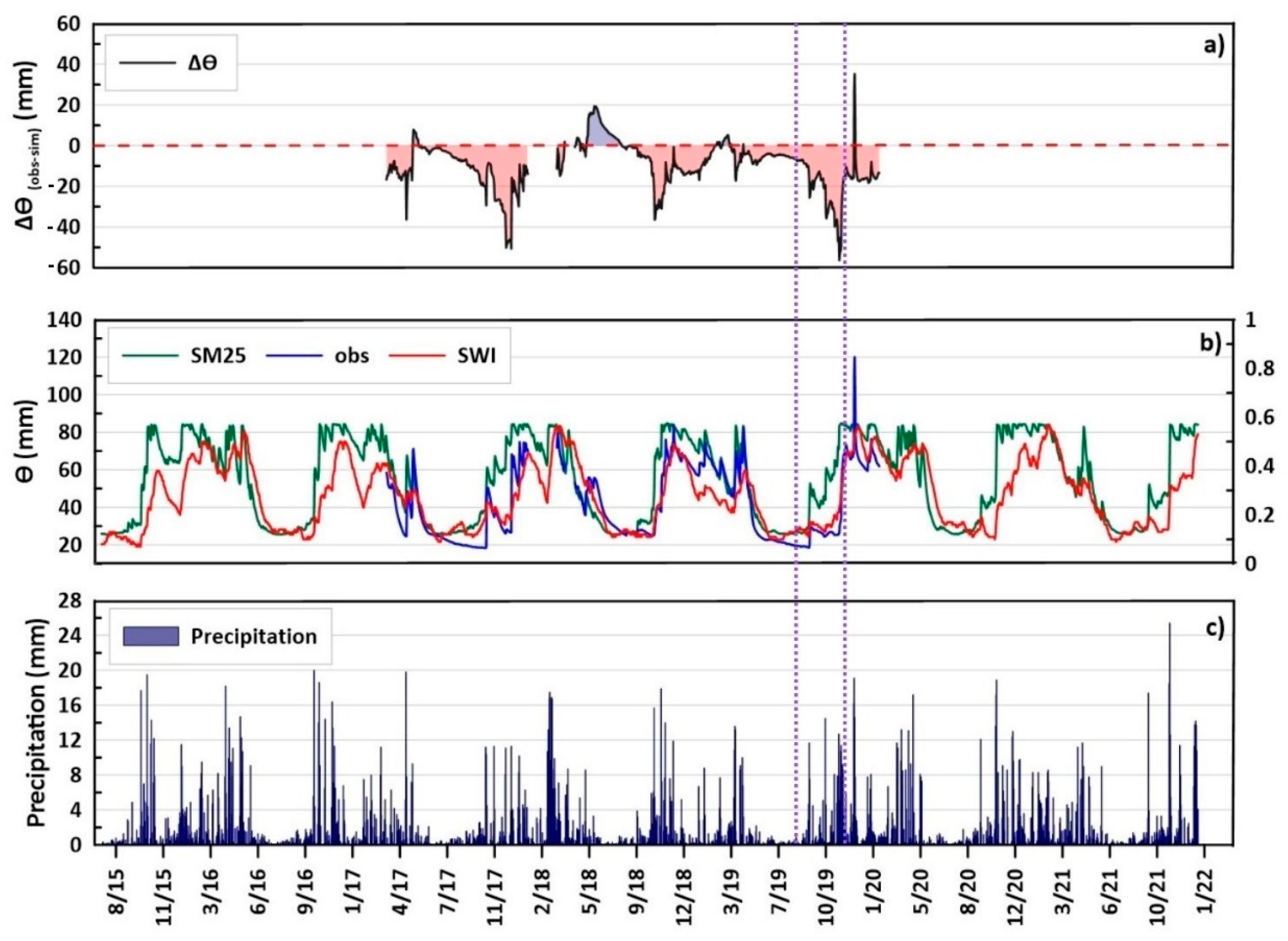
3.1. Soil Moisture Dynamics
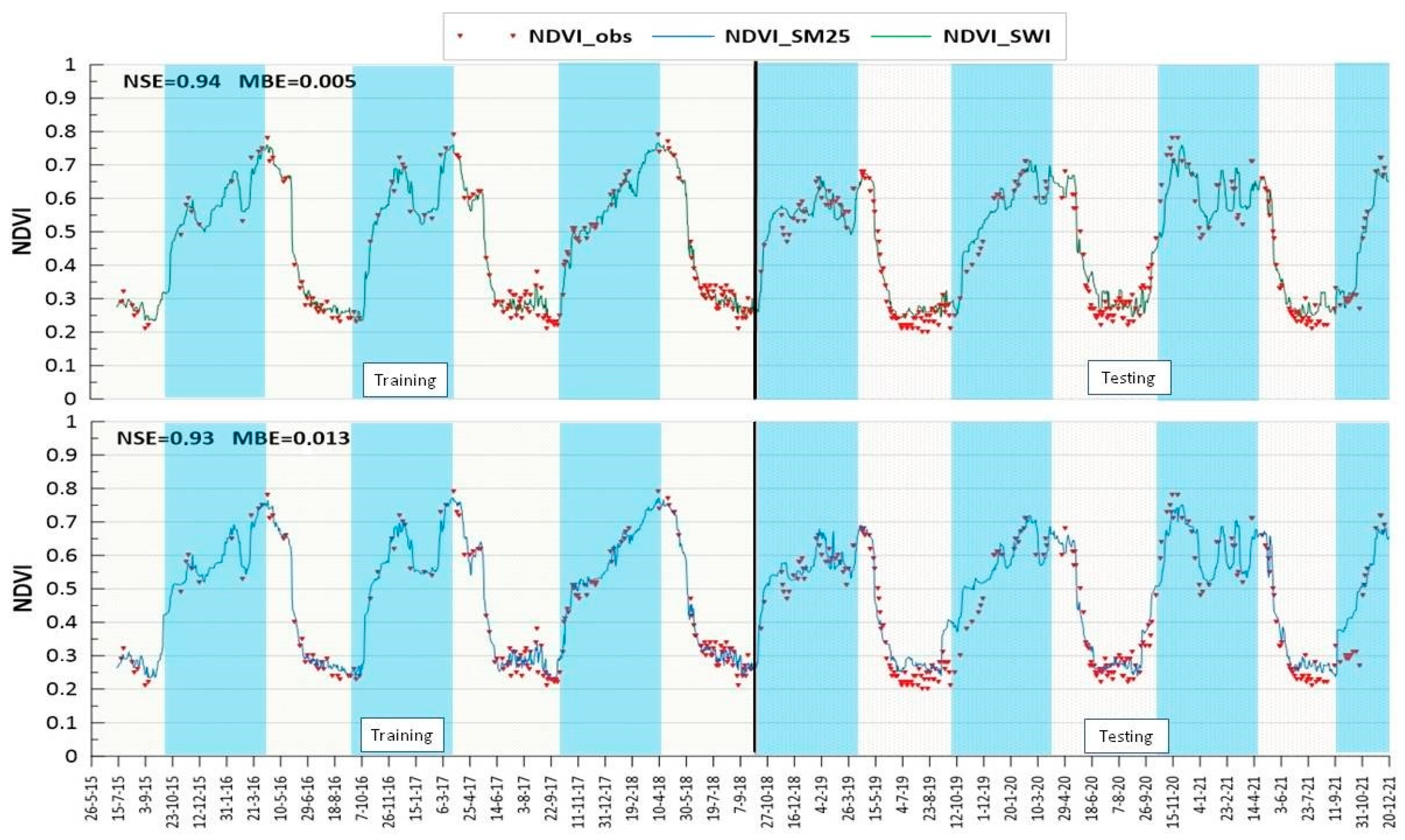
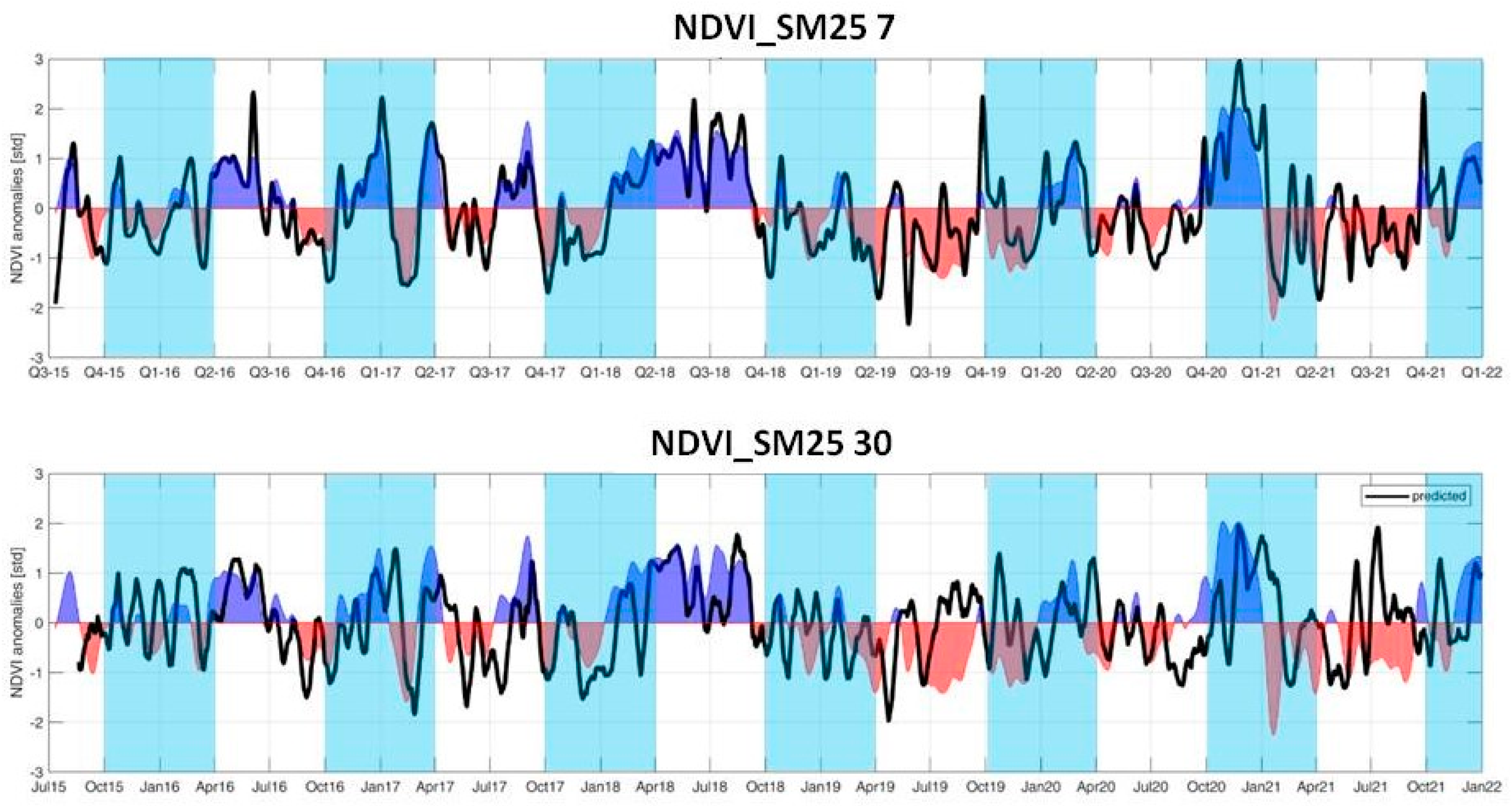
3.2. NDVI Forecasting Models Results
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bugalho, M.N.; Caldeira, M.C.; Pereira, J.S.; Aronson, J.; Pausas, J.G. Mediterranean Cork Oak Savannas Require Human Use to Sustain Biodiversity and Ecosystem Services. Front. Ecol. Environ. 2011, 9, 278–286. [Google Scholar] [CrossRef] [PubMed]
- Pulido, F.J.; Díaz, M.; Hidalgo de Trucios, S.J. Size Structure and Regeneration of Spanish Holm Oak Quercus Ilex Forests and Dehesas: Effects of Agroforestry Use on Their Long-Term Sustainability. For. Ecol. Manag. 2001, 146, 1–13. [Google Scholar] [CrossRef]
- Schils, R.L.M.; Bufe, C.; Rhymer, C.M.; Francksen, R.M.; Klaus, V.H.; Abdalla, M.; Milazzo, F.; Lellei-Kovács, E.; Berge, H.T.; Bertora, C.; et al. Permanent Grasslands in Europe: Land Use Change and Intensification Decrease Their Multifunctionality. Agric. Ecosyst. Environ. 2022, 330, 107891. [Google Scholar] [CrossRef]
- Shujun, G. The Meteorological Disaster Risk Assessment Based on the Diffusion Mechanism. J. Risk Anal. Crisis Response 2012, 2, 124. [Google Scholar]
- Zhao, A.; Yu, Q.; Feng, L.; Zhang, A.; Pei, T. Evaluating the Cumulative and Time-Lag Effects of Drought on Grassland Vegetation: A Case Study in the Chinese Loess Plateau. J. Environ. Manag. 2020, 261, 110214. [Google Scholar] [CrossRef]
- Chang, S.; Chen, H.; Wu, B.; Nasanbat, E.; Yan, N.; Davdai, B. A Practical Satellite-Derived Vegetation Drought Index for Arid and Semi-Arid Grassland Drought Monitoring. Remote Sens. 2021, 13, 414. [Google Scholar] [CrossRef]
- Warter, M.M.; Singer, M.B.; Cuthbert, M.O.; Roberts, D.; Caylor, K.K.; Sabathier, R.; Stella, J. Drought Onset and Propagation into Soil Moisture and Grassland Vegetation Responses during the 2012–2019 Major Drought in Southern California. Hydrol. Earth Syst. Sci. 2021, 25, 3713–3729. [Google Scholar] [CrossRef]
- Kowalski, K.; Okujeni, A.; Hostert, P. A Generalized Framework for Drought Monitoring across Central European Grassland Gradients with Sentinel-2 Time Series. Remote Sens. Environ. 2023, 286, 113449. [Google Scholar] [CrossRef]
- Oukaddour, K.; Le Page, M.; Fakir, Y. Toward a Redefinition of Agricultural Drought Periods—A Case Study in a Mediterranean Semi-Arid Region. Remote Sens. 2024, 16, 83. [Google Scholar] [CrossRef]
- Essa, Y.H.; Hirschi, M.; Thiery, W.; El-Kenawy, A.M.; Yang, C. Drought Characteristics in Mediterranean under Future Climate Change. Npj Clim. Atmos. Sci. 2023, 6, 133. [Google Scholar] [CrossRef]
- Almeida-Ñauñay, A.F.; Villeta, M.; Quemada, M.; Tarquis, A.M. Assessment of Drought Indexes on Different Time Scales: A Case in Semiarid Mediterranean Grasslands. Remote Sens. 2022, 14, 565. [Google Scholar] [CrossRef]
- He, X.; Estes, L.; Konar, M.; Tian, D.; Anghileri, D.; Baylis, K.; Evans, T.P.; Sheffield, J. Integrated Approaches to Understanding and Reducing Drought Impact on Food Security across Scales. Curr. Opin. Environ. Sustain. 2019, 40, 43–54. [Google Scholar] [CrossRef]
- Rasheed, M.W.; Tang, J.; Sarwar, A.; Shah, S.; Saddique, N.; Khan, M.U.; Imran Khan, M.; Nawaz, S.; Shamshiri, R.R.; Aziz, M.; et al. Soil Moisture Measuring Techniques and Factors Affecting the Moisture Dynamics: A Comprehensive Review. Sustainability 2022, 14, 11538. [Google Scholar] [CrossRef]
- Peng, J.; Loew, A. Recent Advances in Soil Moisture Estimation from Remote Sensing. Water 2017, 9, 530. [Google Scholar] [CrossRef]
- Chen, Q.; Miao, F.; Wang, H.; Xu, Z.-X.; Tang, Z.; Yang, L.; Qi, S. Downscaling of Satellite Remote Sensing Soil Moisture Products Over the Tibetan Plateau Based on the Random Forest Algorithm: Preliminary Results. Earth Space Sci. 2020, 7, e2020EA001265. [Google Scholar] [CrossRef]
- Rahimzadeh-Bajgiran, P.; Berg, A.A.; Champagne, C.; Omasa, K. Estimation of Soil Moisture Using Optical/Thermal Infrared Remote Sensing in the Canadian Prairies. ISPRS J. Photogramm. Remote Sens. 2013, 83, 94–103. [Google Scholar] [CrossRef]
- Zhang, J.; Zhou, Z.; Yao, F.; Yang, L.; Hao, C. Validating the Modified Perpendicular Drought Index in the North China Region Using In Situ Soil Moisture Measurement. IEEE Geosci. Remote Sens. Lett. 2015, 12, 542–546. [Google Scholar] [CrossRef]
- Efremova, N.; Seddik, M.E.A.; Erten, E. Soil Moisture Estimation Using Sentinel-1/-2 Imagery Coupled with CycleGAN for Time-Series Gap Filing. IEEE Trans. Geosci. Remote Sens. 2022, 60, 4705111. [Google Scholar] [CrossRef]
- Yu, W.; Li, J.; Liu, Q.; Zhao, J.; Dong, Y.; Wang, C.; Lin, S.; Zhu, X.; Zhang, H. Spatial–Temporal Prediction of Vegetation Index With Deep Recurrent Neural Networks. IEEE Geosci. Remote Sens. Lett. 2022, 19, 1–5. [Google Scholar] [CrossRef]
- Geng, X.; Li, H.; Yao, Z.; Chen, X.; Yang, Z.; Li, S.; Wu, L.; Cui, Y. Potential of ANN for Prolonging Remote Sensing-Based Soil Moisture Products for Long-Term Time Series Analysis. IEEE Geosci. Remote Sens. Lett. 2022, 19, 1–5. [Google Scholar] [CrossRef]
- Tong, C.; Wang, H.; Magagi, R.; Goïta, K.; Wang, K. Spatial Gap-Filling of SMAP Soil Moisture Pixels Over Tibetan Plateau via Machine Learning Versus Geostatistics. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 9899–9912. [Google Scholar] [CrossRef]
- McDonnell, J.; Brophy, C.; Ruelle, E.; Shalloo, L.; Lambkin, K.; Hennessy, D. Weather Forecasts to Enhance an Irish Grass Growth Model. Eur. J. Agron. 2019, 105, 168–175. [Google Scholar] [CrossRef]
- Trnka, M.; Eitzinger, J.; Gruszczynski, G.; Buchgraber, K.; Resch, R.; Schaumberger, A. A Simple Statistical Model for Predicting Herbage Production from Permanent Grassland. Grass Forage Sci. 2006, 61, 253–271. [Google Scholar] [CrossRef]
- Krueger, E.S.; Ochsner, T.E.; Levi, M.R.; Basara, J.B.; Snitker, G.J.; Wyatt, B.M. Grassland Productivity Estimates Informed by Soil Moisture Measurements: Statistical and Mechanistic Approaches. Agron. J. 2021, 113, 3498–3517. [Google Scholar] [CrossRef]
- Wang, J.; Rich, P.M.; Price, K.P.; Kettle, W.D. Relations between NDVI, Grassland Production, and Crop Yield in the Central Great Plains. Geocarto Int. 2005, 20, 5–11. [Google Scholar] [CrossRef]
- Xue, J.; Su, B. Significant Remote Sensing Vegetation Indices: A Review of Developments and Applications. J. Sens. 2017, 2017, e1353691. [Google Scholar] [CrossRef]
- BOLETÍN OFICIAL DEL ESTADO. BOE.Es-BOE-A-2022-6738 Orden APA/355/2022; de 18 de Abril; 2022; Available online: https://www.boe.es/boe/dias/2022/04/26/pdfs/BOE-A-2022-6738.pdf (accessed on 12 August 2024).
- Han, Y.; Wang, Y.; Zhao, Y. Estimating Soil Moisture Conditions of the Greater Changbai Mountains by Land Surface Temperature and NDVI. IEEE Trans. Geosci. Remote Sens. 2010, 48, 2509–2515. [Google Scholar] [CrossRef]
- Chen, T.; de Jeu, R.A.M.; Liu, Y.Y.; van der Werf, G.R.; Dolman, A.J. Using Satellite Based Soil Moisture to Quantify the Water Driven Variability in NDVI: A Case Study over Mainland Australia. Remote Sens. Environ. 2014, 140, 330–338. [Google Scholar] [CrossRef]
- García-Gamero, V.; Peña, A.; Laguna, A.M.; Giráldez, J.V.; Vanwalleghem, T. Factors Controlling the Asymmetry of Soil Moisture and Vegetation Dynamics in a Hilly Mediterranean Catchment. J. Hydrol. 2021, 598, 126207. [Google Scholar] [CrossRef]
- Wang, X.; Xie, H.; Guan, H.; Zhou, X. Different Responses of MODIS-Derived NDVI to Root-Zone Soil Moisture in Semi-Arid and Humid Regions. J. Hydrol. 2007, 340, 12–24. [Google Scholar] [CrossRef]
- Insua, J.R.; Utsumi, S.A.; Basso, B. Estimation of Spatial and Temporal Variability of Pasture Growth and Digestibility in Grazing Rotations Coupling Unmanned Aerial Vehicle (UAV) with Crop Simulation Models. PLoS ONE 2019, 14, e0212773. [Google Scholar] [CrossRef]
- Bounouh, O.; Tarquis, A.M.; Farah, I.R. Novel Method for Combining NDVI Time Series Forecasting Models. In Proceedings of the IGARSS 2022-2022 IEEE International Geoscience and Remote Sensing Symposium, Kuala Lumpur, Malaysia, 17–22 July 2022; pp. 2355–2357. [Google Scholar]
- Iwasaki, H. NDVI Prediction over Mongolian Grassland Using GSMaP Precipitation Data and JRA-25/JCDAS Temperature Data. J. Arid. Environ. 2009, 73, 557–562. [Google Scholar] [CrossRef]
- Ahmad, R.; Yang, B.; Ettlin, G.; Berger, A.; Rodríguez-Bocca, P. A Machine-Learning Based ConvLSTM Architecture for NDVI Forecasting. Int. Trans. Oper. Res. 2020, 30, 2025–2048. [Google Scholar] [CrossRef]
- Berger, A.; Ettlin, G.; Quincke, C.; Rodríguez-Bocca, P. Predicting the Normalized Difference Vegetation Index (NDVI) by Training a Crop Growth Model with Historical Data. Comput. Electron. Agric. 2019, 161, 305–311. [Google Scholar] [CrossRef]
- Casanova, J.J.; O’Shaughnessy, S.A.; Evett, S.R.; Rush, C.M. Development of a Wireless Computer Vision Instrument to Detect Biotic Stress in Wheat. Sensors 2014, 14, 17753–17769. [Google Scholar] [CrossRef]
- Hadria, R.; Benabdelouahab, T.; Elmansouri, L.; Gadouali, F.; Ouatiki, H.; Lebrini, Y.; Boudhar, A.; Salhi, A.; Lionboui, H. Derivation of Air Temperature of Agricultural Areas of Morocco from Remotely Land Surface Temperature Based on the Updated Köppen-Geiger Climate Classification. Model. Earth Syst. Environ. 2019, 5, 1883–1892. [Google Scholar] [CrossRef]
- Htitiou, A.; Boudhar, A.; Lebrini, Y.; Hadria, R.; Lionboui, H.; Benabdelouahab, T. A Comparative Analysis of Different Phenological Information Retrieved from Sentinel-2 Time Series Images to Improve Crop Classification: A Machine Learning Approach. Geocarto Int. 2022, 37, 1426–1449. [Google Scholar] [CrossRef]
- Rehman, T.U.; Mahmud, M.d.S.; Chang, Y.K.; Jin, J.; Shin, J. Current and Future Applications of Statistical Machine Learning Algorithms for Agricultural Machine Vision Systems. Comput. Electron. Agric. 2019, 156, 585–605. [Google Scholar] [CrossRef]
- Pereira, L.A.M.; Nakamura, R.Y.M.; de Souza, G.F.S.; Martins, D.; Papa, J.P. Aquatic Weed Automatic Classification Using Machine Learning Techniques. Comput. Electron. Agric. 2012, 87, 56–63. [Google Scholar] [CrossRef]
- Haghverdi, A.; Leib, B.G.; Washington-Allen, R.A.; Ayers, P.D.; Buschermohle, M.J. Perspectives on Delineating Management Zones for Variable Rate Irrigation. Comput. Electron. Agric. 2015, 117, 154–167. [Google Scholar] [CrossRef]
- Boydell, B.; McBratney, A.B. Identifying Potential Within-Field Management Zones from Cotton-Yield Estimates. Precis. Agric. 2002, 3, 9–23. [Google Scholar] [CrossRef]
- Liu, S.; Cossell, S.; Tang, J.; Dunn, G.; Whitty, M. A Computer Vision System for Early Stage Grape Yield Estimation Based on Shoot Detection. Comput. Electron. Agric. 2017, 137, 88–101. [Google Scholar] [CrossRef]
- Park, J.Y.; Ale, S.; Teague, W.R.; Dowhower, S.L. Simulating Hydrologic Responses to Alternate Grazing Management Practices at the Ranch and Watershed Scales. J. Soil Water Conserv. 2017, 72, 102–121. [Google Scholar] [CrossRef]
- Xia, J.; Yuan, W.; Lienert, S.; Joos, F.; Ciais, P.; Viovy, N.; Wang, Y.; Wang, X.; Zhang, H.; Chen, Y.; et al. Global Patterns in Net Primary Production Allocation Regulated by Environmental Conditions and Forest Stand Age: A Model-Data Comparison. J. Geophys. Res. Biogeosci. 2019, 124, 2039–2059. [Google Scholar] [CrossRef]
- Dokic, K.; Blaskovic, L.; Mandusic, D. From Machine Learning to Deep Learning in Agriculture—The Quantitative Review of Trends. IOP Conf. Ser. Earth Environ. Sci. 2020, 614, 012138. [Google Scholar] [CrossRef]
- Xie, S.; Du, J.; Zhou, X.; Zhang, X.; Feng, X.; Zheng, W.; Li, Z.; Xu, C.-Y. A Progressive Segmented Optimization Algorithm for Calibrating Time-Variant Parameters of the Snowmelt Runoff Model (SRM). J. Hydrol. 2018, 566, 470–483. [Google Scholar] [CrossRef]
- Li, X.; Yuan, W.; Dong, W. A Machine Learning Method for Predicting Vegetation Indices in China. Remote Sens. 2021, 13, 1147. [Google Scholar] [CrossRef]
- Roy, B. Optimum Machine Learning Algorithm Selection for Forecasting Vegetation Indices: MODIS NDVI & EVI. Remote Sens. Appl. Soc. Environ. 2021, 23, 100582. [Google Scholar] [CrossRef]
- Wang, Y.; Wu, G.; Deng, L.; Tang, Z.; Wang, K.; Sun, W.; Shangguan, Z. Prediction of Aboveground Grassland Biomass on the Loess Plateau, China, Using a Random Forest Algorithm. Sci. Rep. 2017, 7, 6940. [Google Scholar] [CrossRef] [PubMed]
- Yin, J.; Feng, Q.; Liang, T.; Meng, B.; Yang, S.; Gao, J.; Ge, J.; Hou, M.; Liu, J.; Wang, W.; et al. Estimation of Grassland Height Based on the Random Forest Algorithm and Remote Sensing in the Tibetan Plateau. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 178–186. [Google Scholar] [CrossRef]
- Catorci, A.; Lulli, R.; Malatesta, L.; Tavoloni, M.; Tardella, F.M. How the Interplay between Management and Interannual Climatic Variability Influences the NDVI Variation in a Sub-Mediterranean Pastoral System: Insight into Sustainable Grassland Use under Climate Change. Agric. Ecosyst. Environ. 2021, 314, 107372. [Google Scholar] [CrossRef]
- Peel, M.C.; Finlayson, B.L.; McMahon, T.A. Updated World Map of the Köppen-Geiger Climate Classification. Hydrol. Earth Syst. Sci. 2007, 11, 1633–1644. [Google Scholar] [CrossRef]
- Campbell Scientific Operational Specifications. Available online: https://help.campbellsci.com/cs650-cs655/cs650-cs655/specifications/operational-specifications.htm?Highlight=Accurancy (accessed on 28 July 2024).
- Walker, J.P.; Willgoose, G.R.; Kalma, J.D. In Situ Measurement of Soil Moisture: A Comparison of Techniques. J. Hydrol. 2004, 293, 85–99. [Google Scholar] [CrossRef]
- Brocca, L.; Hasenauer, S.; Lacava, T.; Melone, F.; Moramarco, T.; Wagner, W.; Dorigo, W.; Matgen, P.; Martínez-Fernández, J.; Llorens, P.; et al. Soil Moisture Estimation through ASCAT and AMSR-E Sensors: An Intercomparison and Validation Study across Europe. Remote Sens. Environ. 2011, 115, 3390–3408. [Google Scholar] [CrossRef]
- Brocca, L.; Filippucci, P.; Hahn, S.; Ciabatta, L.; Massari, C.; Camici, S.; Schüller, L.; Bojkov, B.; Wagner, W. SM2RAIN–ASCAT (2007–2018): Global Daily Satellite Rainfall Data from ASCAT Soil Moisture Observations. Earth Syst. Sci. Data 2019, 11, 1583–1601. [Google Scholar] [CrossRef]
- Bauer-Marschallinger, B.; Paulik, C.; Hochstöger, S.; Mistelbauer, T.; Modanesi, S.; Ciabatta, L.; Massari, C.; Brocca, L.; Wagner, W. Soil Moisture from Fusion of Scatterometer and SAR: Closing the Scale Gap with Temporal Filtering. Remote Sens. 2018, 1019, 1030. [Google Scholar] [CrossRef]
- Wagner, W.; Lemoine, G.; Borgeaud, M.; Rott, H. A Study of Vegetation Cover Effects on ERS Scatterometer Data. IEEE Trans. Geosci. Remote Sens. 1999, 37, 938–948. [Google Scholar] [CrossRef]
- Paulik, C.; Dorigo, W.; Wagner, W.; Kidd, R. Validation of the ASCAT Soil Water Index Using in Situ Data from the International Soil Moisture Network. Int. J. Appl. Earth Obs. Geoinf. 2014, 30, 1–8. [Google Scholar] [CrossRef]
- Sheikh, V.; Visser, S.; Stroosnijder, L. A Simple Model to Predict Soil Moisture: Bridging Event and Continuous Hydrological (BEACH) Modelling. Environ. Model. Softw. 2009, 24, 542–556. [Google Scholar] [CrossRef]
- Morgan, R.P.C.; Duzant, J.H. Modified MMF (Morgan–Morgan–Finney) Model for Evaluating Effects of Crops and Vegetation Cover on Soil Erosion. Earth Surf. Process. Landf. 2008, 33, 90–106. [Google Scholar] [CrossRef]
- Braden, H.; Deutscher, W. The Model AMBETI; Berichte des Deutschen Wetterdienstes: Offenbach am Main, Germany, 1995.
- Arnold, J.G.; Moriasi, D.N.; Gassman, P.W.; Abbaspour, K.C.; White, M.J.; Srinivasan, R.; Santhi, C.; Harmel, R.D.; Van Griensven, A.; Van Liew, M.W.; et al. SWAT: Model Use, Calibration, and Validation. Trans. ASABE 2012, 55, 1491–1508. [Google Scholar] [CrossRef]
- Manfreda, S.; Fiorentino, M.; Iacobellis, V. DREAM: A Distributed Model for Runoff, Evapotranspiration, and Antecedent Soil Moisture Simulation. Adv. Geosci. 2005, 2, 31–39. [Google Scholar] [CrossRef]
- Kroese, D.P.; Brereton, T.; Taimre, T.; Botev, Z.I. Why the Monte Carlo Method Is so Important Today. WIREs Comput. Stat. 2014, 6, 386–392. [Google Scholar] [CrossRef]
- Singh, V.P. Computer Models of Watershed Hydrology; Water Resources Publications: Littleton, CO, USA, 1995. [Google Scholar]
- Raes, D.; Geerts, S.; Kipkorir, E.; Wellens, J.; Sahli, A. Simulation of Yield Decline as a Result of Water Stress with a Robust Soil Water Balance Model. Agric. Water Manag. 2006, 81, 335–357. [Google Scholar] [CrossRef]
- Nash, J.E.; Sutcliffe, J.V. River Flow Forecasting through Conceptual Models Part I—A Discussion of Principles. J. Hydrol. 1970, 10, 282–290. [Google Scholar] [CrossRef]
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Zaimes, G.N.; Gounaridis, D.; Symenonakis, E. Assessing the Impact of Dams on Riparian and Deltaic Vegetation Using Remotely-Sensed Vegetation Indices and Random Forests Modelling. Ecol. Indic. 2019, 103, 630–641. [Google Scholar] [CrossRef]
- Li, Z.; Rahman, S.M.; Vega, R.; Dong, B. A Hierarchical Approach Using Machine Learning Methods in Solar Photovoltaic Energy Production Forecasting. Energies 2016, 9, 55. [Google Scholar] [CrossRef]
- Kogan, F.; Gitelson, A.; Zakarin, E.; Spivak, L.; Lebed, L. AVHRR-Based Spectral Vegetation Index for Quantitative Assessment of Vegetation State and Productivity. Photogramm. Eng. Remote Sens. 2003, 69, 899–906. [Google Scholar] [CrossRef]
- Gruber, A.; Dorigo, W.A.; Zwieback, S.; Xaver, A.; Wagner, W. Characterizing Coarse-Scale Representativeness of in Situ Soil Moisture Measurements from the International Soil Moisture Network. Vadose Zone J. 2013, 12, vzj2012.0170. [Google Scholar] [CrossRef]
- Deng, Y.; Wang, S.; Bai, X.; Wu, L.; Cao, Y.; Li, H.; Wang, M.; Li, C.; Yang, Y.; Hu, Z.; et al. Comparison of Soil Moisture Products from Microwave Remote Sensing, Land Model, and Reanalysis Using Global Ground Observations. Hydrol. Process. 2020, 34, 836–851. [Google Scholar] [CrossRef]
- Chelli, S.; Canullo, R.; Campetella, G.; Schmitt, A.O.; Bartha, S.; Cervellini, M.; Wellstein, C. The Response of Sub-Mediterranean Grasslands to Rainfall Variation Is Influenced by Early Season Precipitation. Appl. Veg. Sci. 2016, 19, 611–619. [Google Scholar] [CrossRef]
- Zavaleta, E.S.; Shaw, M.R.; Chiariello, N.R.; Thomas, B.D.; Cleland, E.E.; Field, C.B.; Mooney, H.A. Grassland Responses to Three Years of Elevated Temperature, Co2, Precipitation, and N Deposition. Ecol. Monogr. 2003, 73, 585–604. [Google Scholar] [CrossRef]
- Gómez-Giráldez, P.J.; Pérez-Palazón, M.J.; Polo, M.J.; González-Dugo, M.P. Monitoring Grass Phenology and Hydrological Dynamics of an Oak–Grass Savanna Ecosystem Using Sentinel-2 and Terrestrial Photography. Remote Sens. 2020, 12, 600. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Period | SWI7 | SM257 | SWI30 | SM2530 |
|---|---|---|---|---|
| Calibration | 0.94 | 0.90 | 0.91 | 0.91 |
| Validation | 0.73 | 0.66 | 0.60 | 0.61 |
| Period | SWI7 | SM257 | SWI30 | SM2530 |
|---|---|---|---|---|
| Overall | 0.92 | 0.92 | 0.54 | 0.60 |
| GS | 0.93 | 0.92 | 0.56 | 0.62 |
| GS17-18 | 0.93 | 0.93 | 0.59 | 0.65 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Milazzo, F.; Brocca, L.; Vanwalleghem, T. NDVI Prediction of Mediterranean Permanent Grasslands Using Soil Moisture Products. Agronomy 2024, 14, 1798. https://doi.org/10.3390/agronomy14081798
Milazzo F, Brocca L, Vanwalleghem T. NDVI Prediction of Mediterranean Permanent Grasslands Using Soil Moisture Products. Agronomy. 2024; 14(8):1798. https://doi.org/10.3390/agronomy14081798
Chicago/Turabian StyleMilazzo, Filippo, Luca Brocca, and Tom Vanwalleghem. 2024. "NDVI Prediction of Mediterranean Permanent Grasslands Using Soil Moisture Products" Agronomy 14, no. 8: 1798. https://doi.org/10.3390/agronomy14081798
APA StyleMilazzo, F., Brocca, L., & Vanwalleghem, T. (2024). NDVI Prediction of Mediterranean Permanent Grasslands Using Soil Moisture Products. Agronomy, 14(8), 1798. https://doi.org/10.3390/agronomy14081798