
Development of Pipeline Transient Mixed Flow Model with Smoothed Particle Hydrodynamics Based on Preissmann Slot Method

 ,
,
Abstract
:1. Introduction
2. Numerical Methods
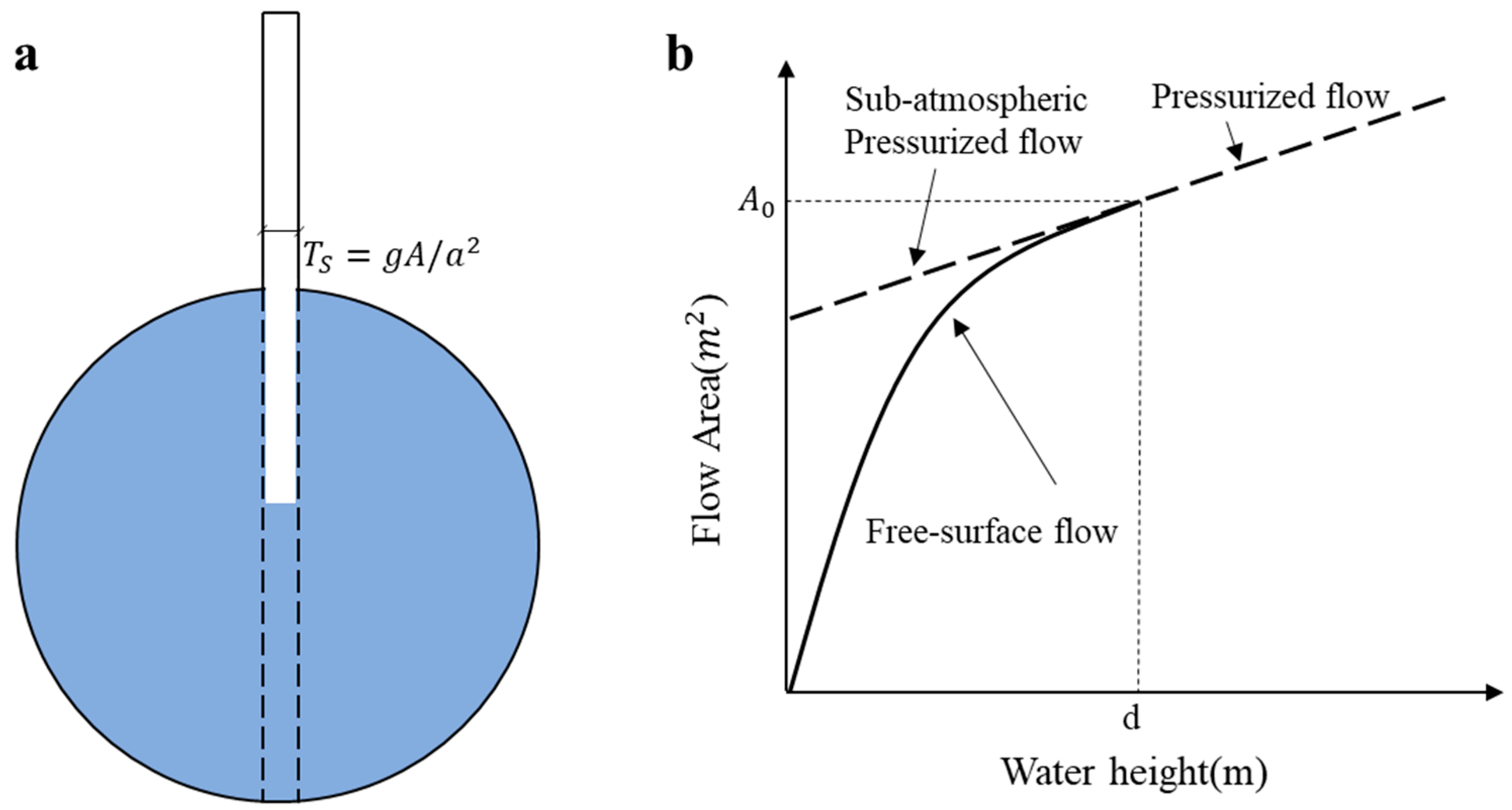
2.1. The Preissmann Slot Model
2.2. Smoothed Particle Hydrodynamics Method
2.3. Discretization of the PSM with SPH
2.4. Time Integration Scheme
2.5. Boundary Treatments
3. Test Results and Discussions
3.1. SPH-PSM Model Parameter Optimization
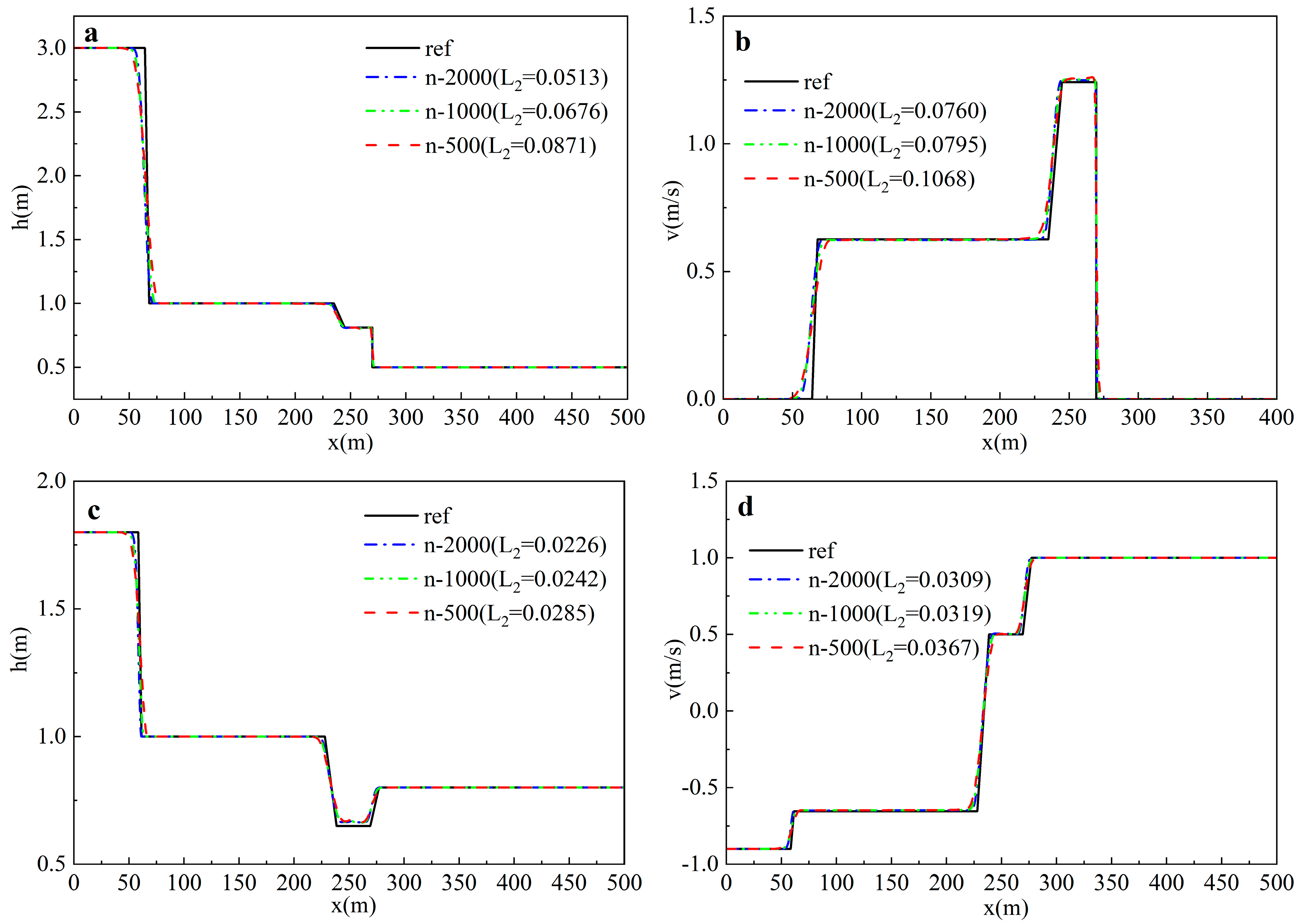
3.1.1. SPH-Related Parameters
- (1)
- The initial particle number
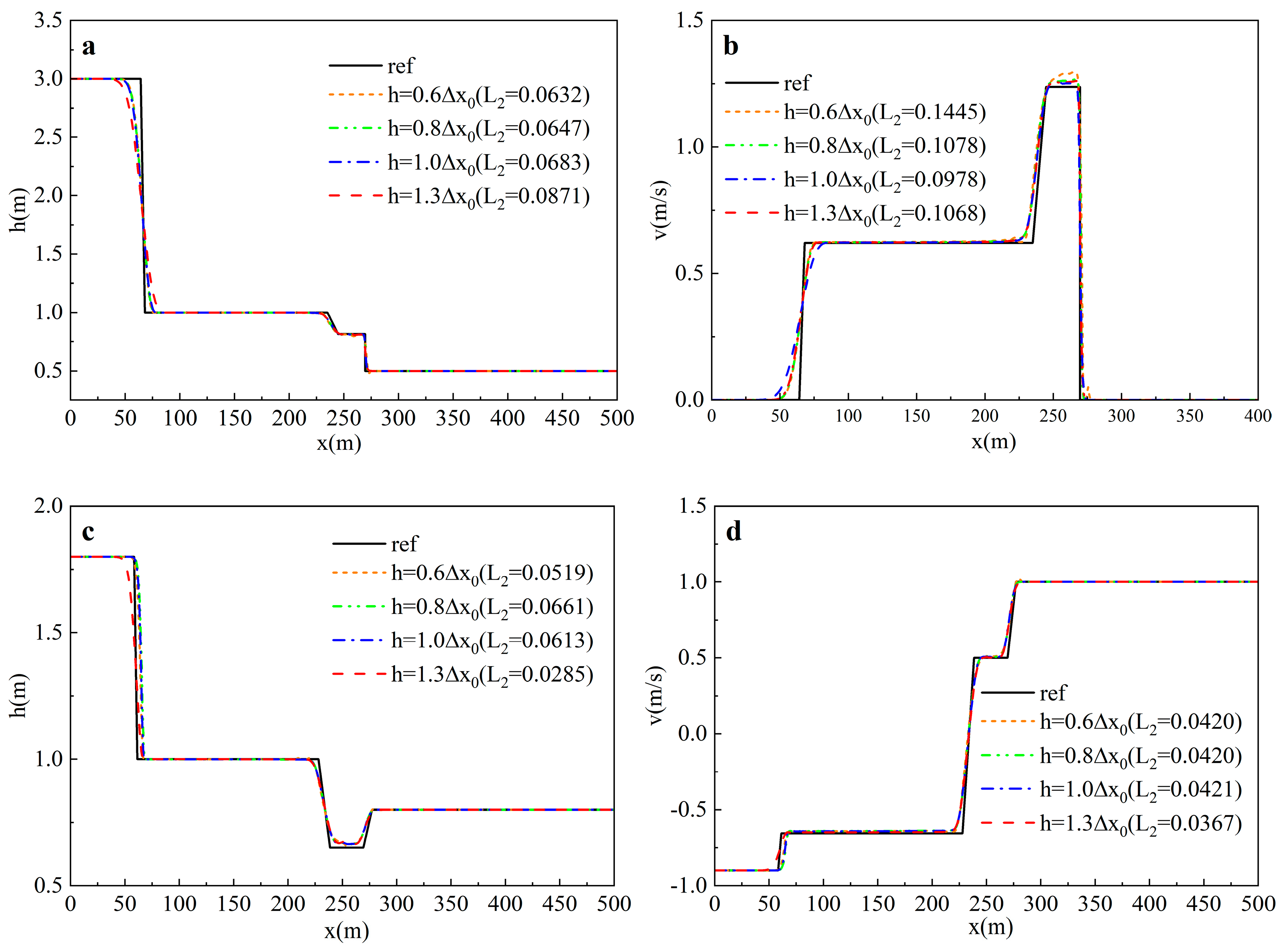
- (2)
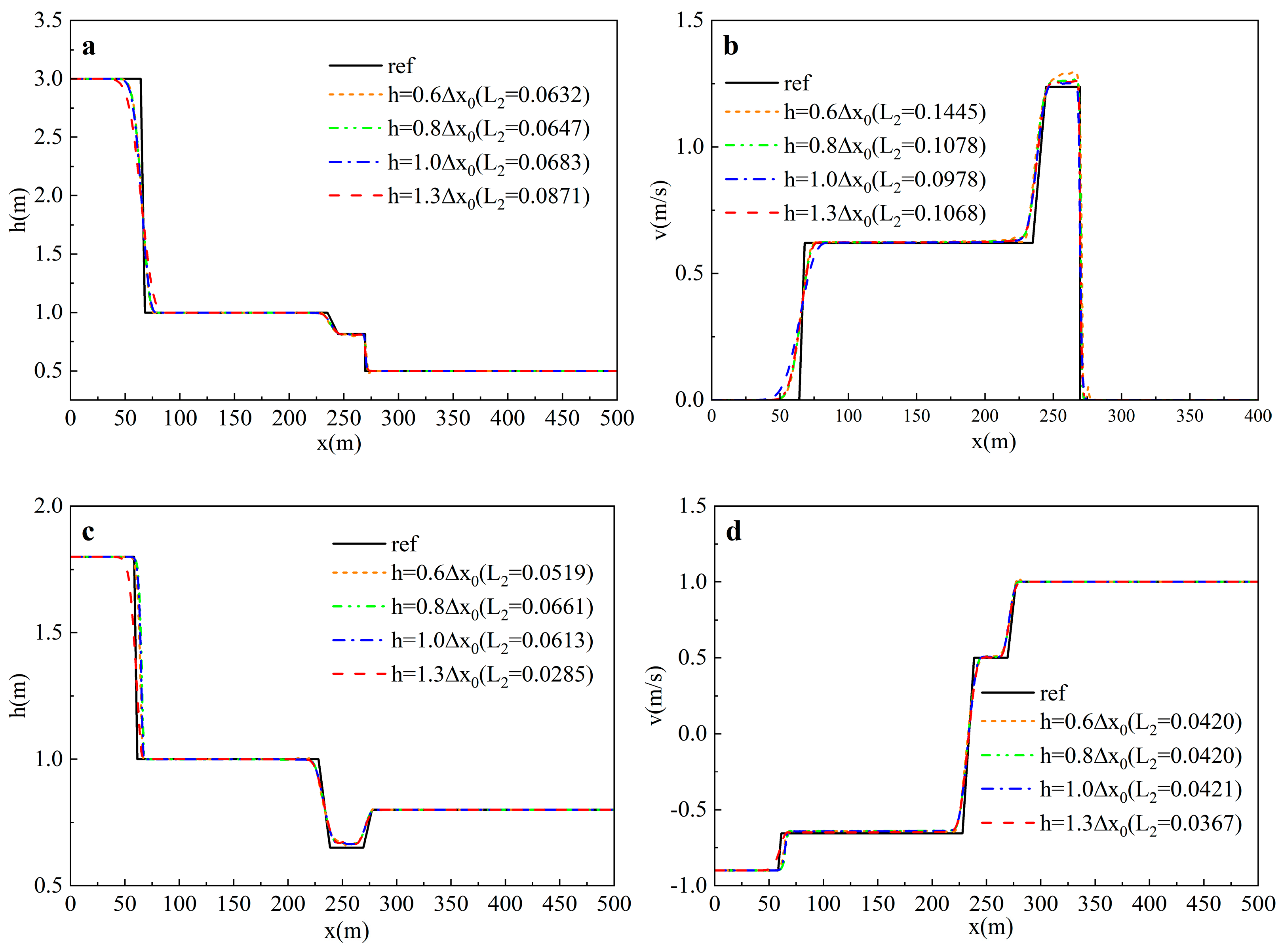
- Smoothing Length
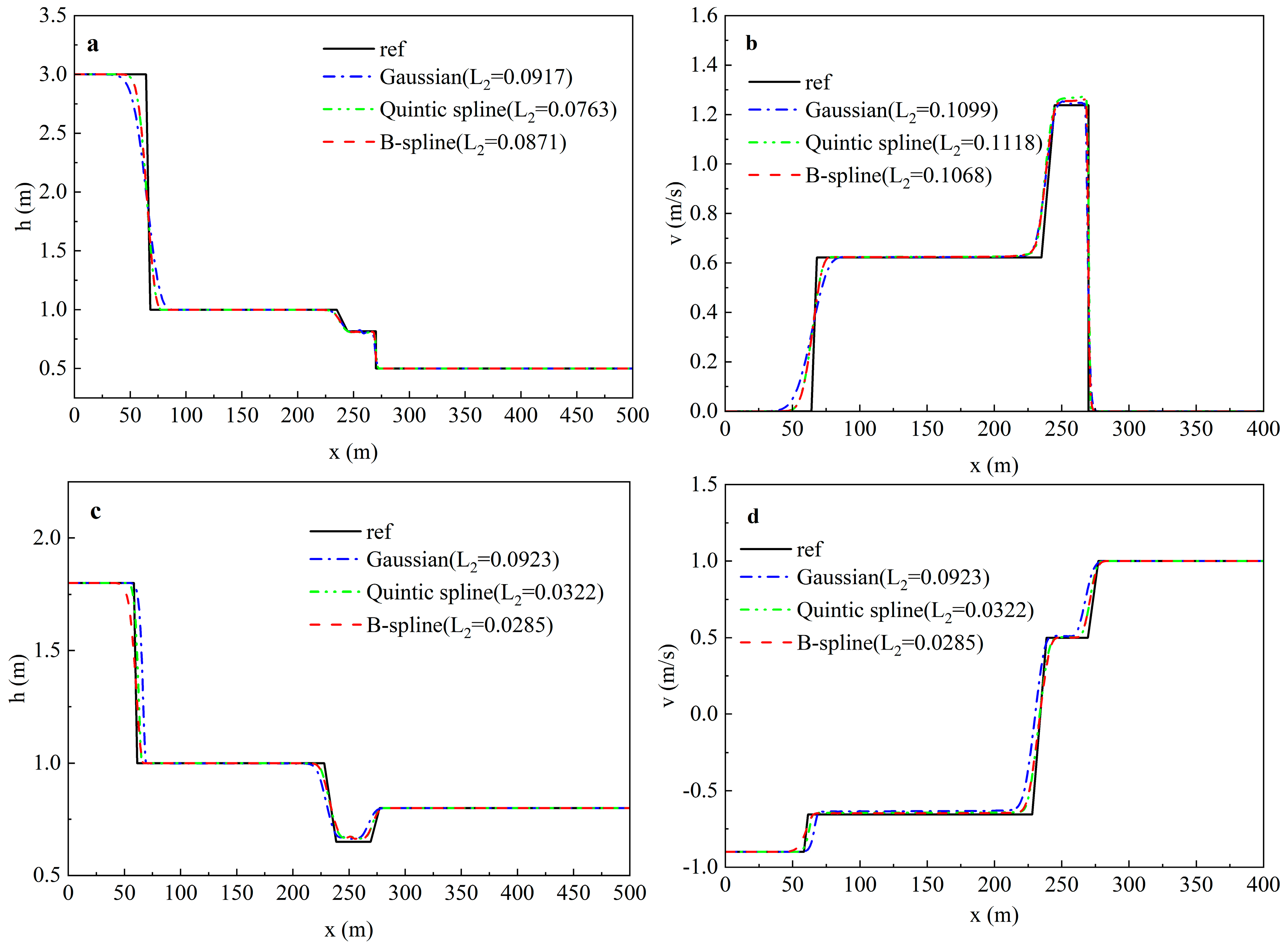
- (3)
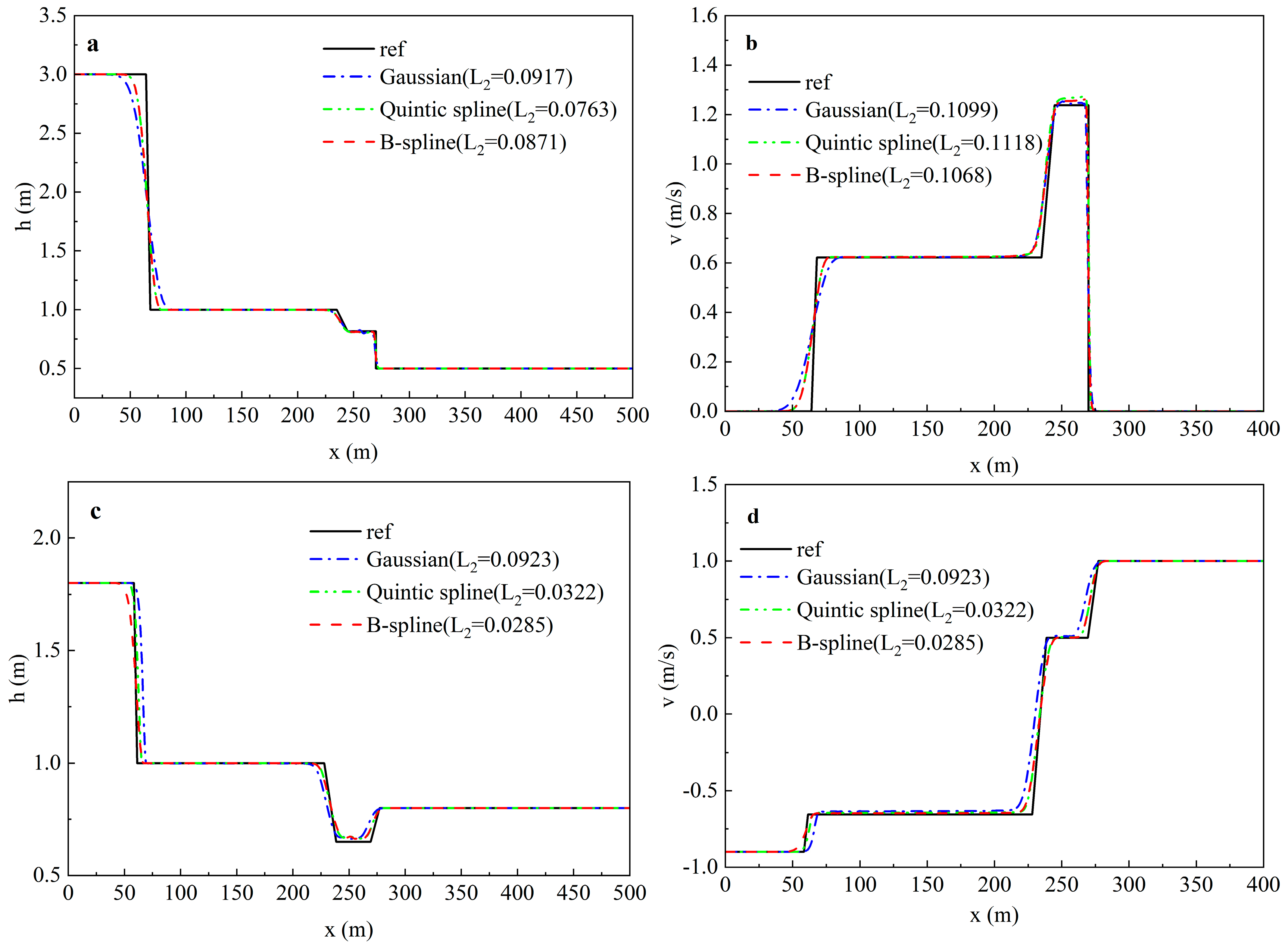
- Smoothing Kernel Function
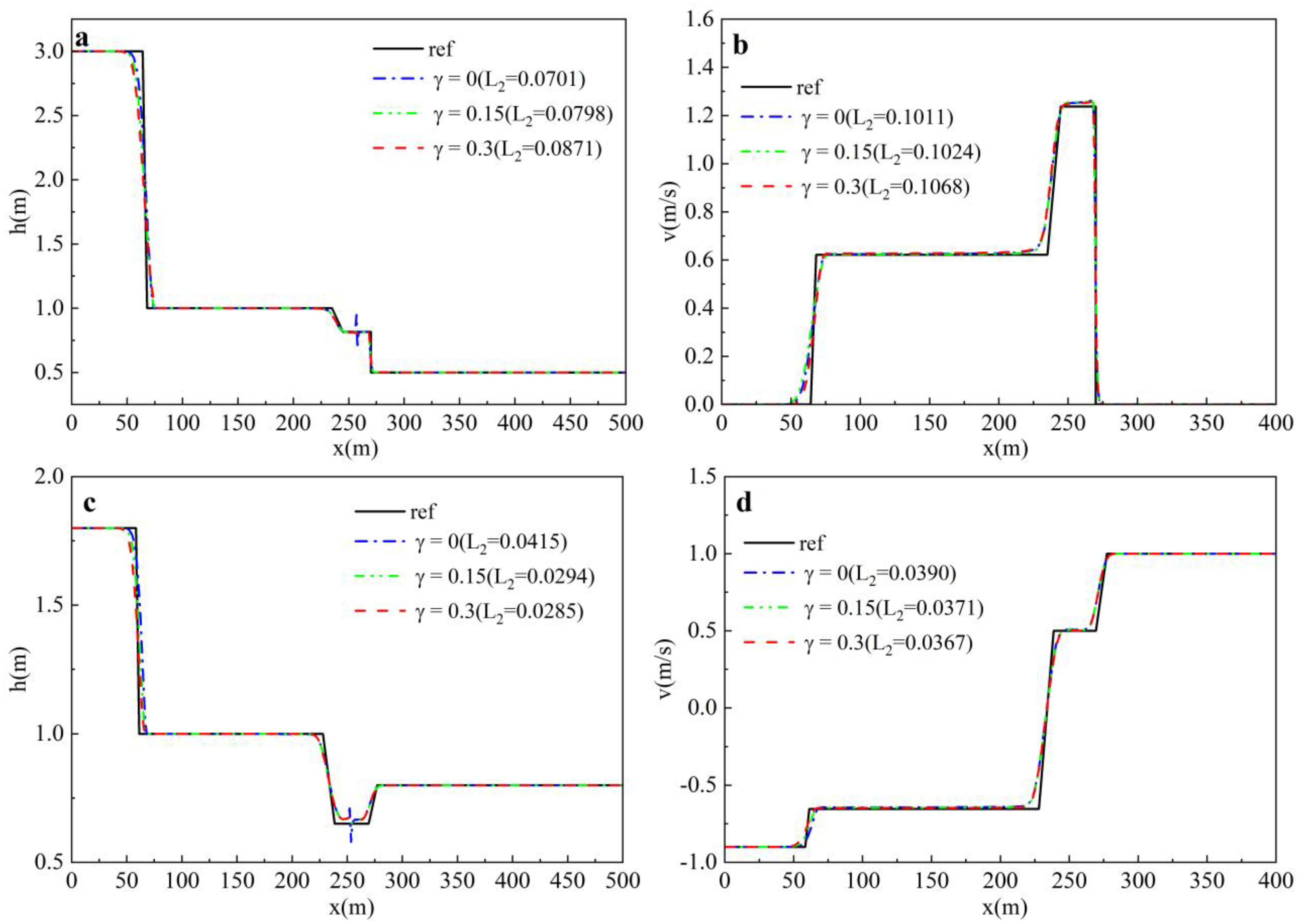
- (4)
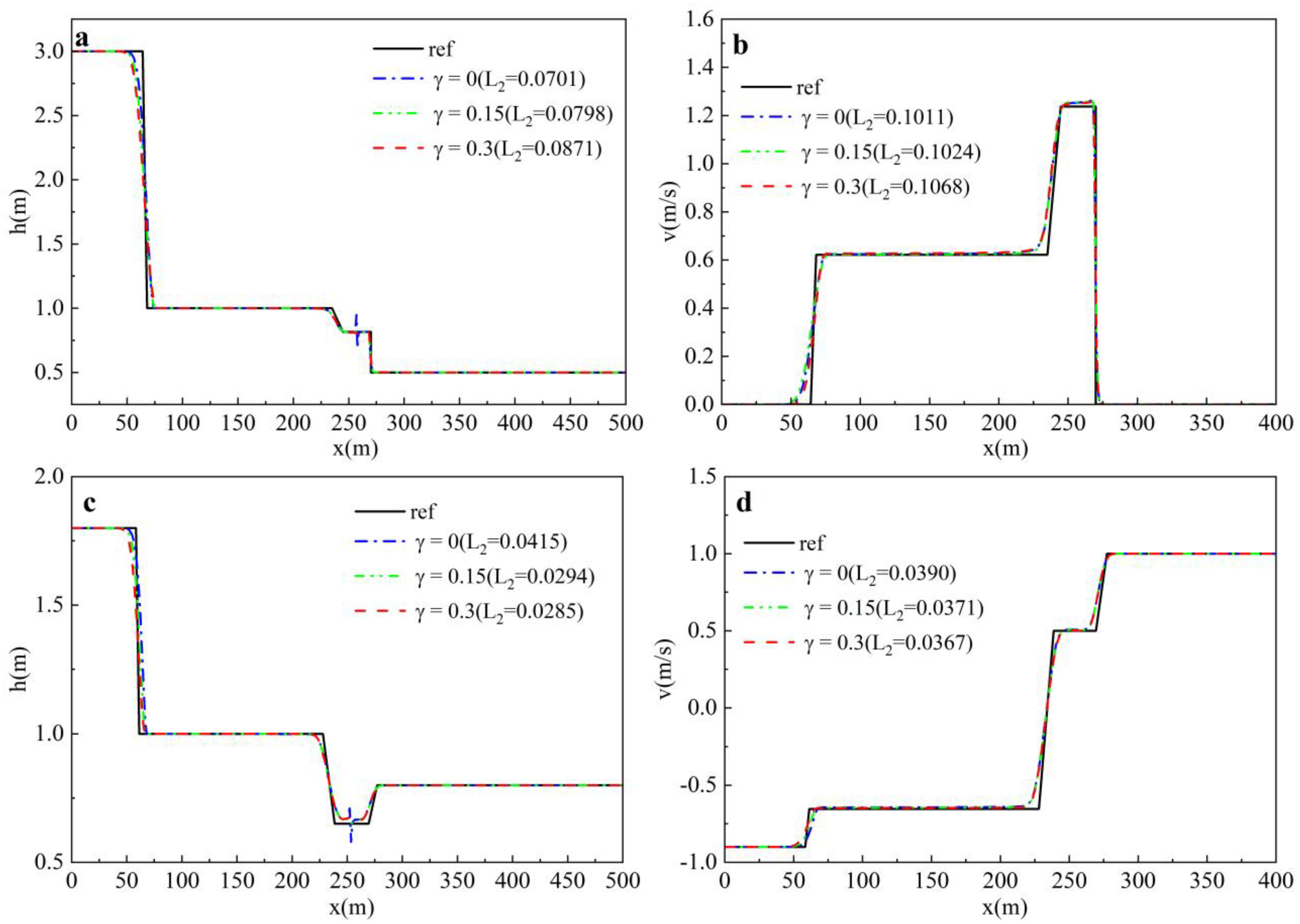
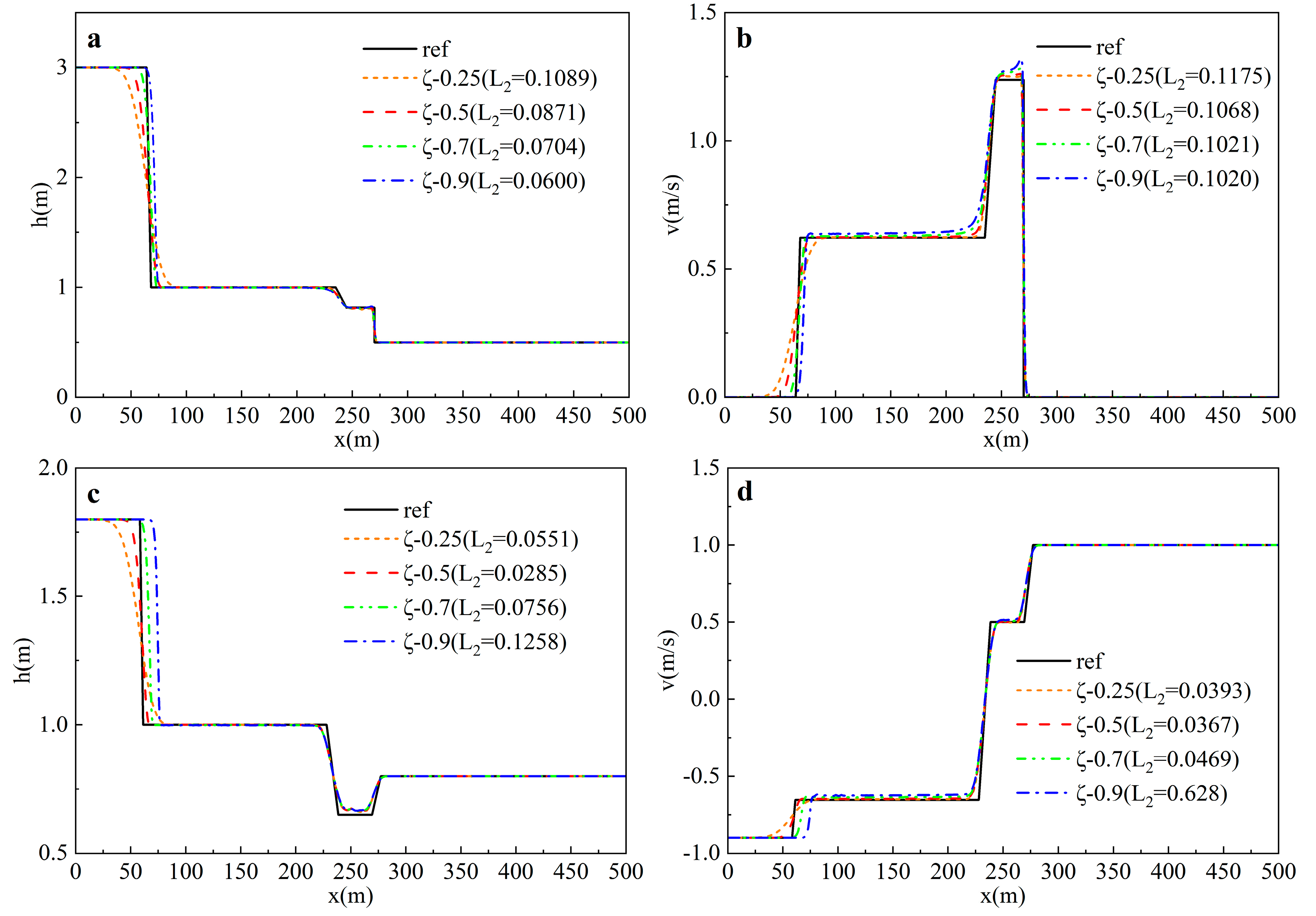
- Density Diffusion Coefficient
- (5)
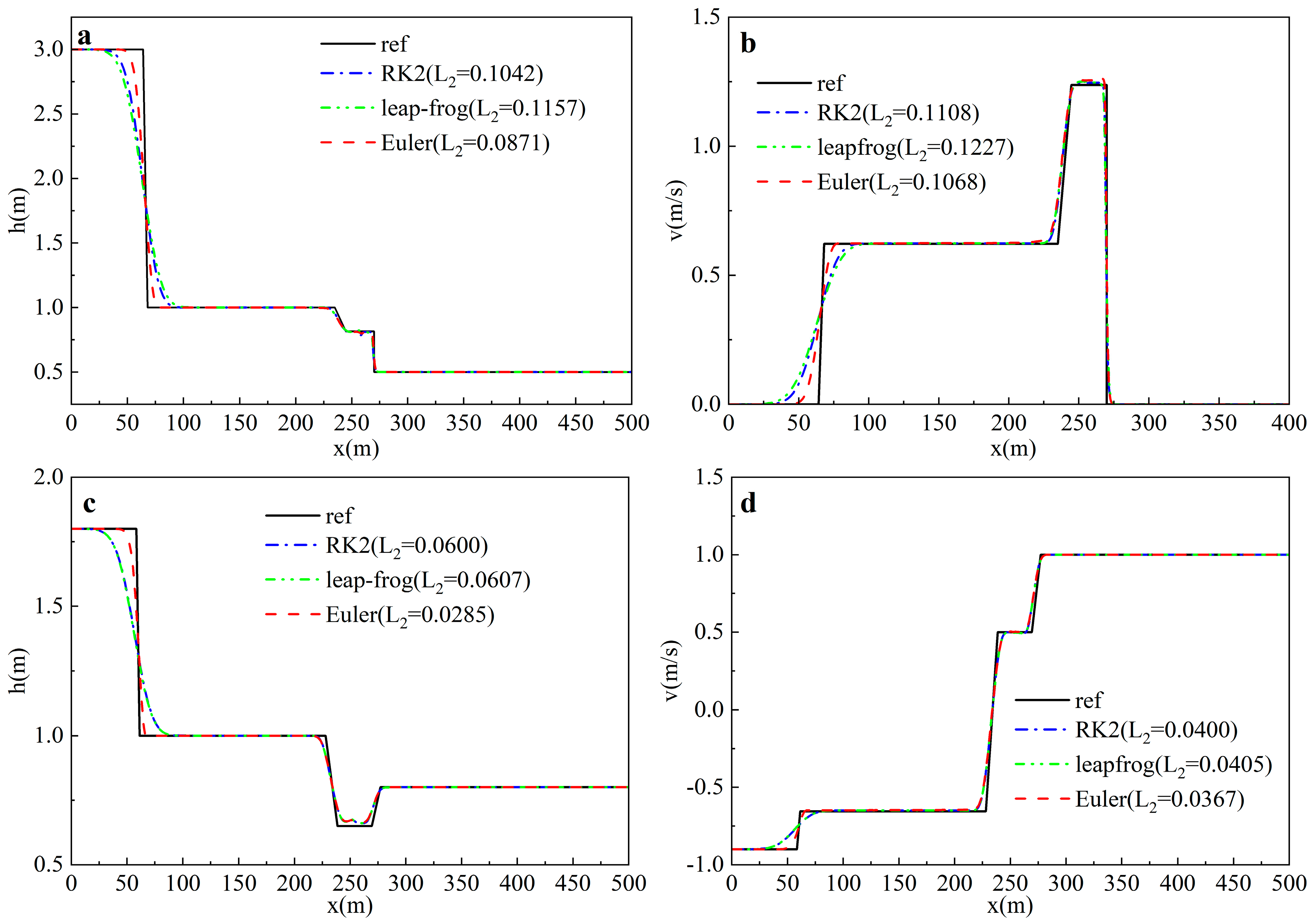
- Time integration scheme
- (6)
- Courant number
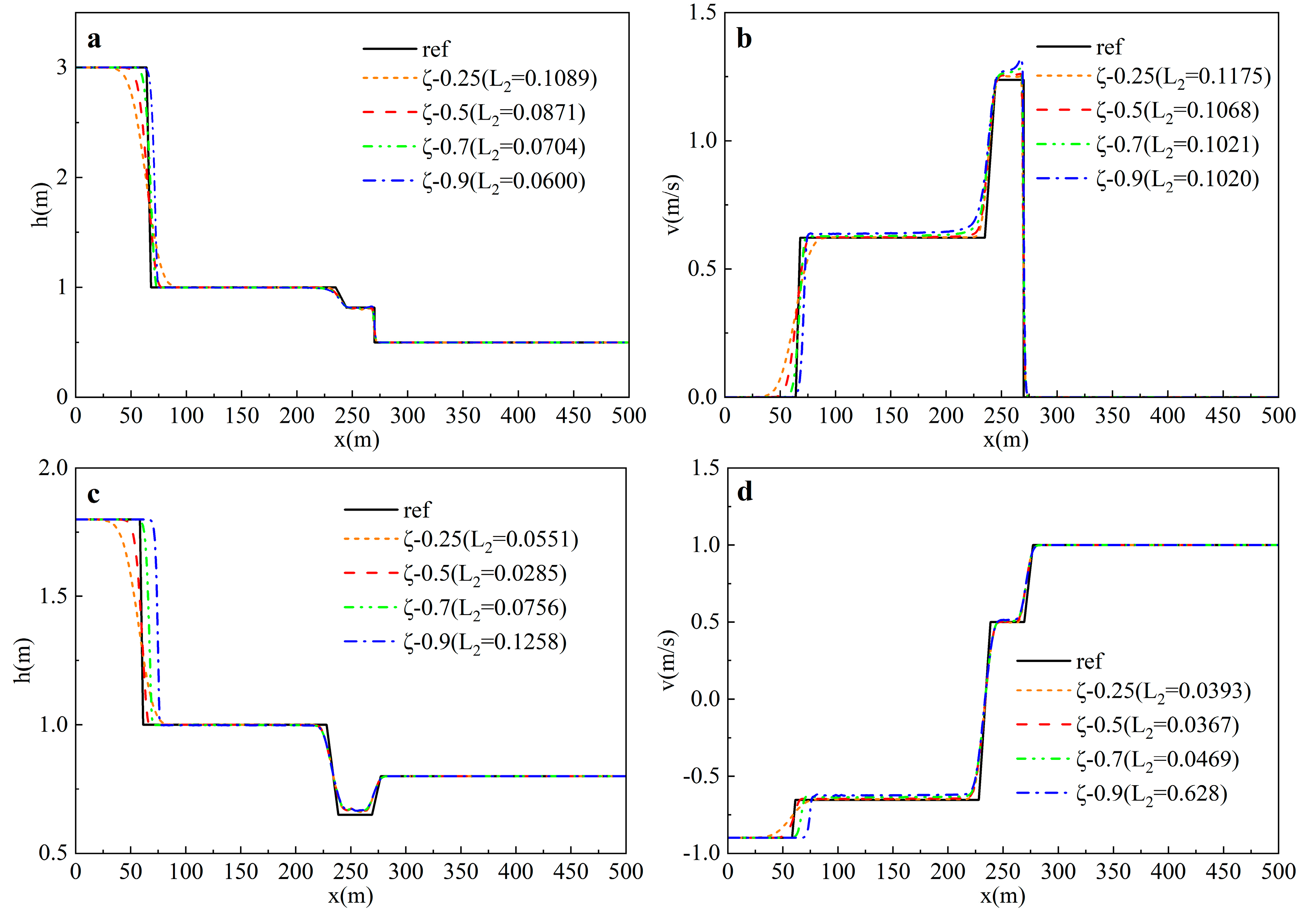
3.1.2. PSM-Related Parameters
3.2. Numerical Case Validation
3.2.1. Case 1: Dam-Break Case
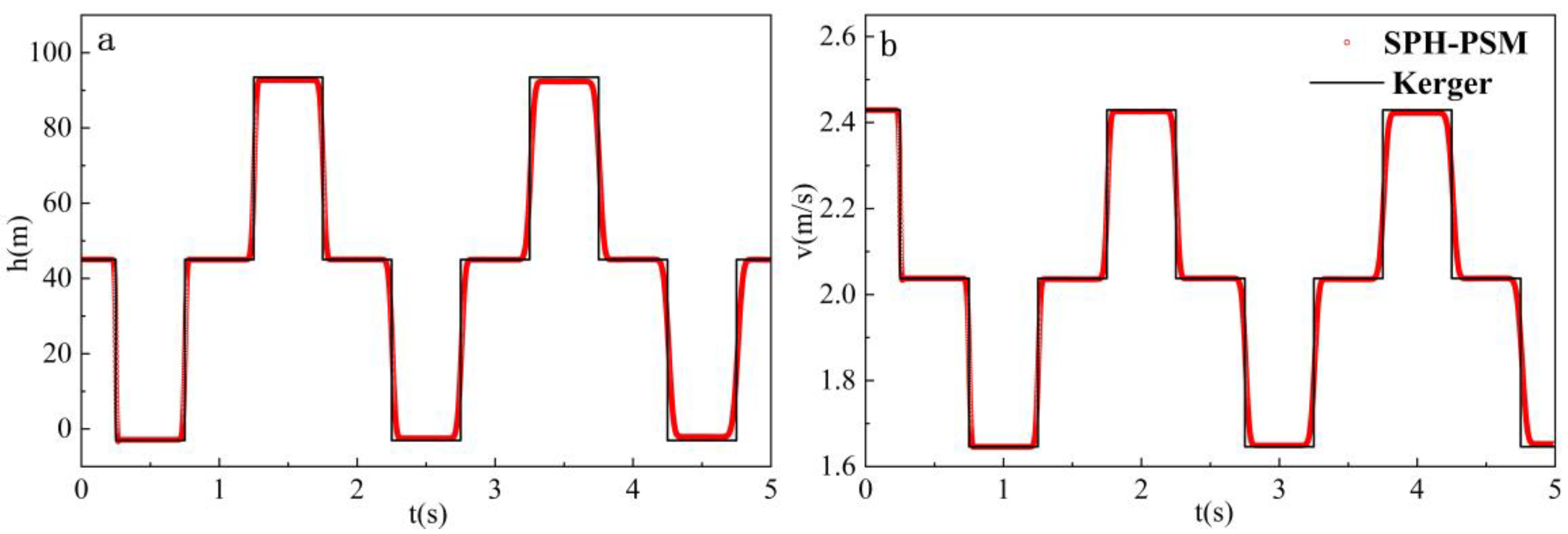
3.2.2. Case 2: Water Hammer Cases
3.2.3. Mixed Flow Cases
- (1)
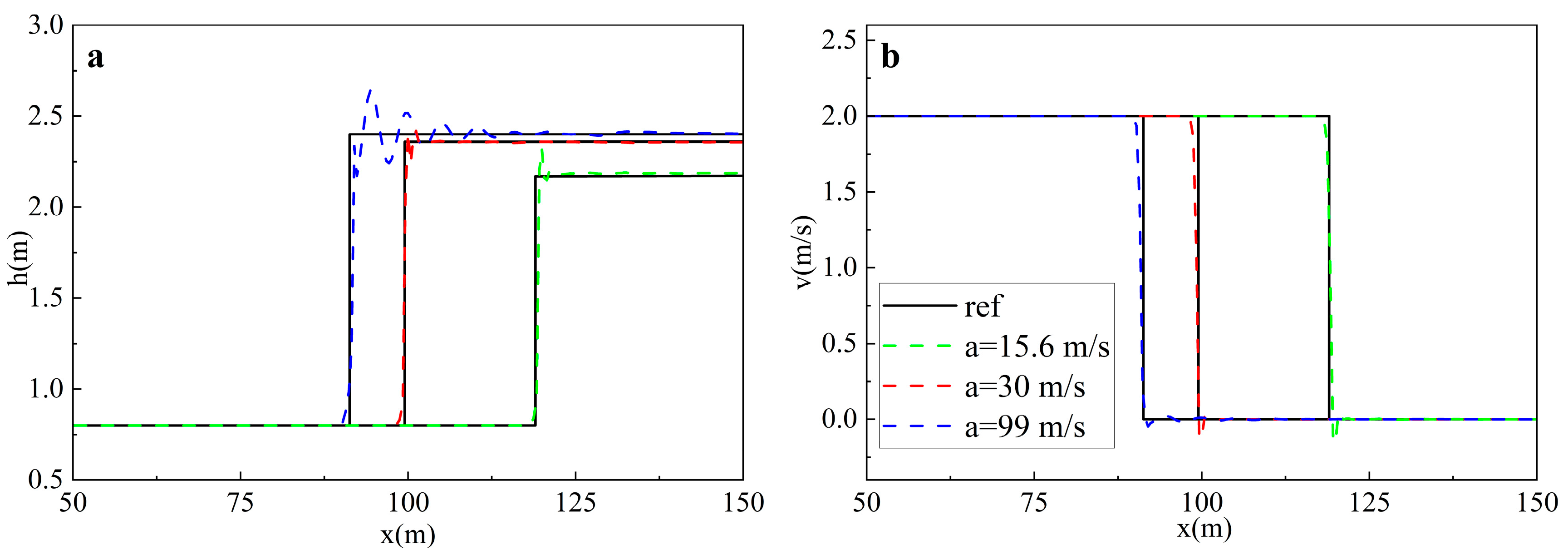
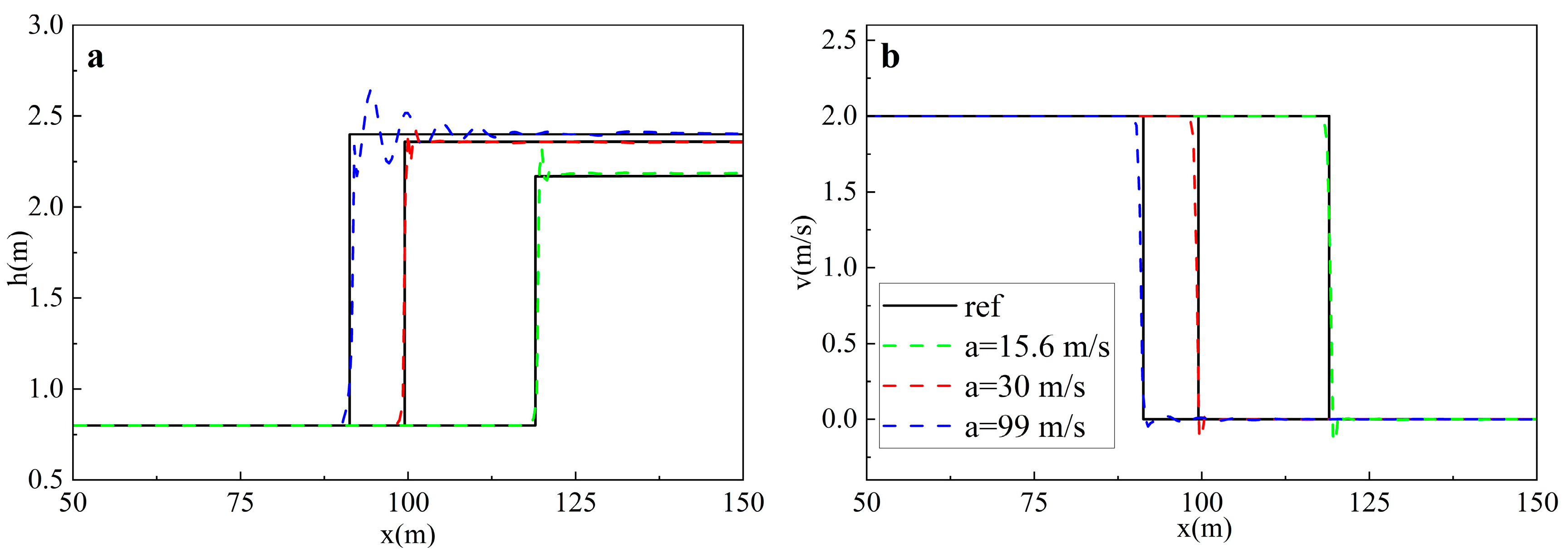
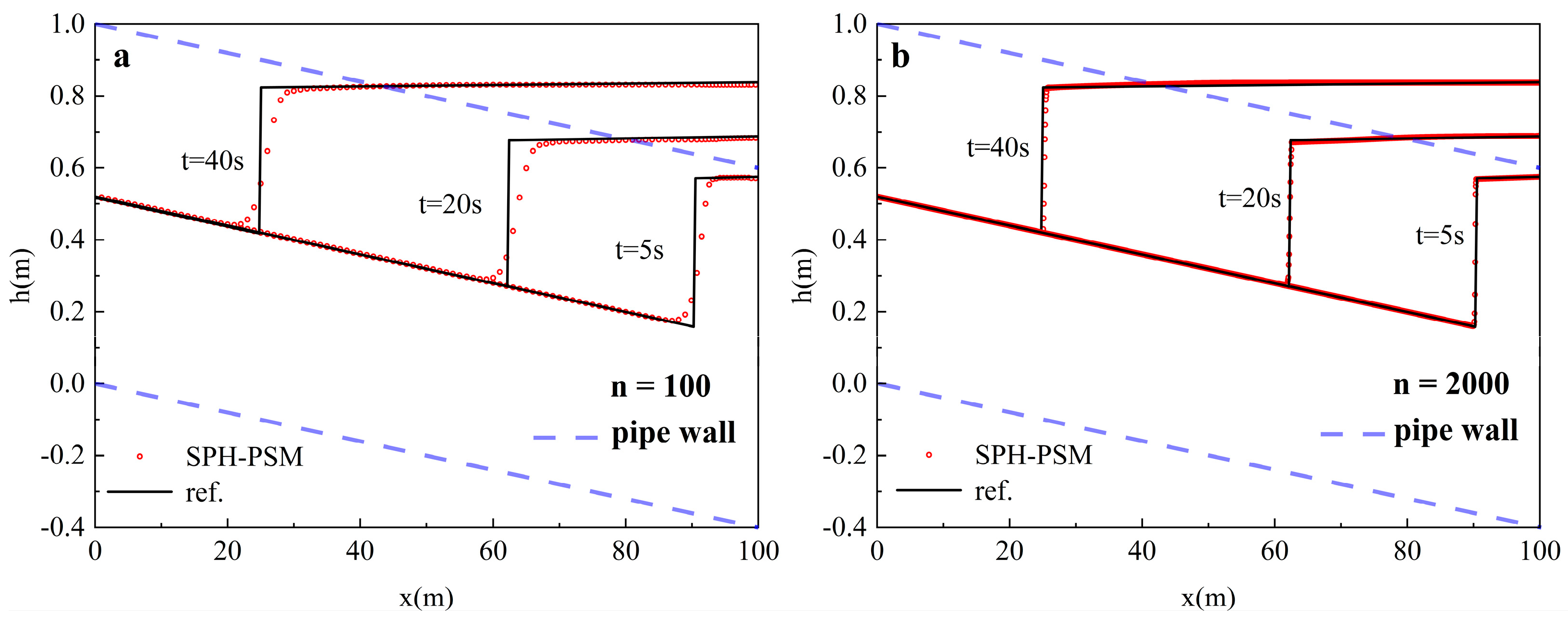
- Case 3: Pipeline Valve Rapid Closure Case
- (2)
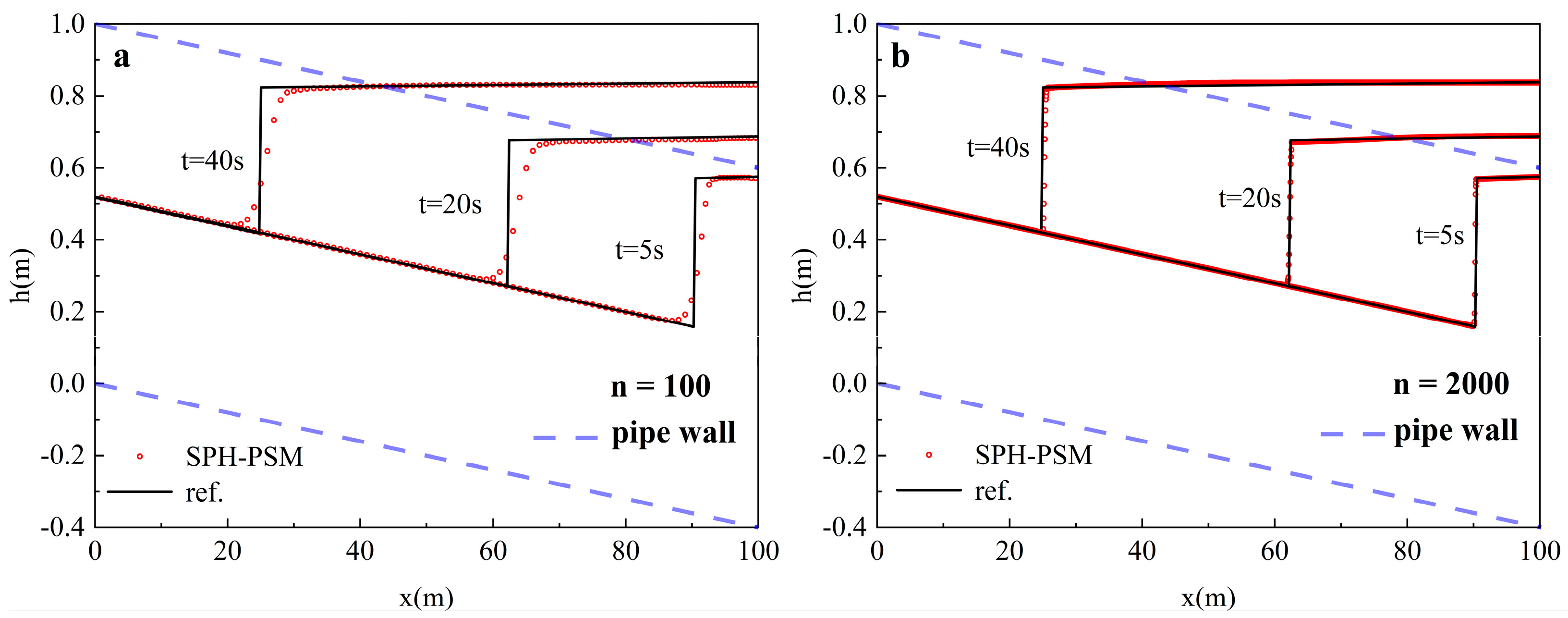
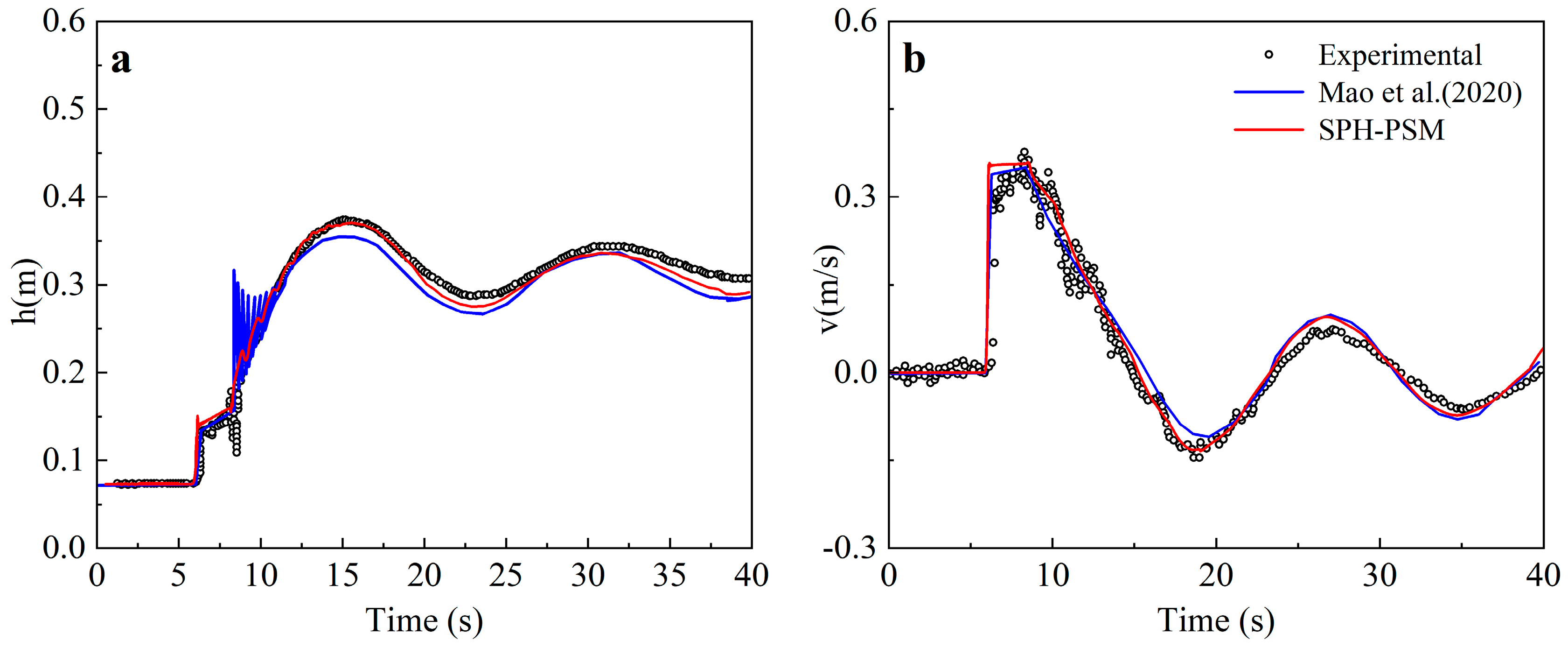
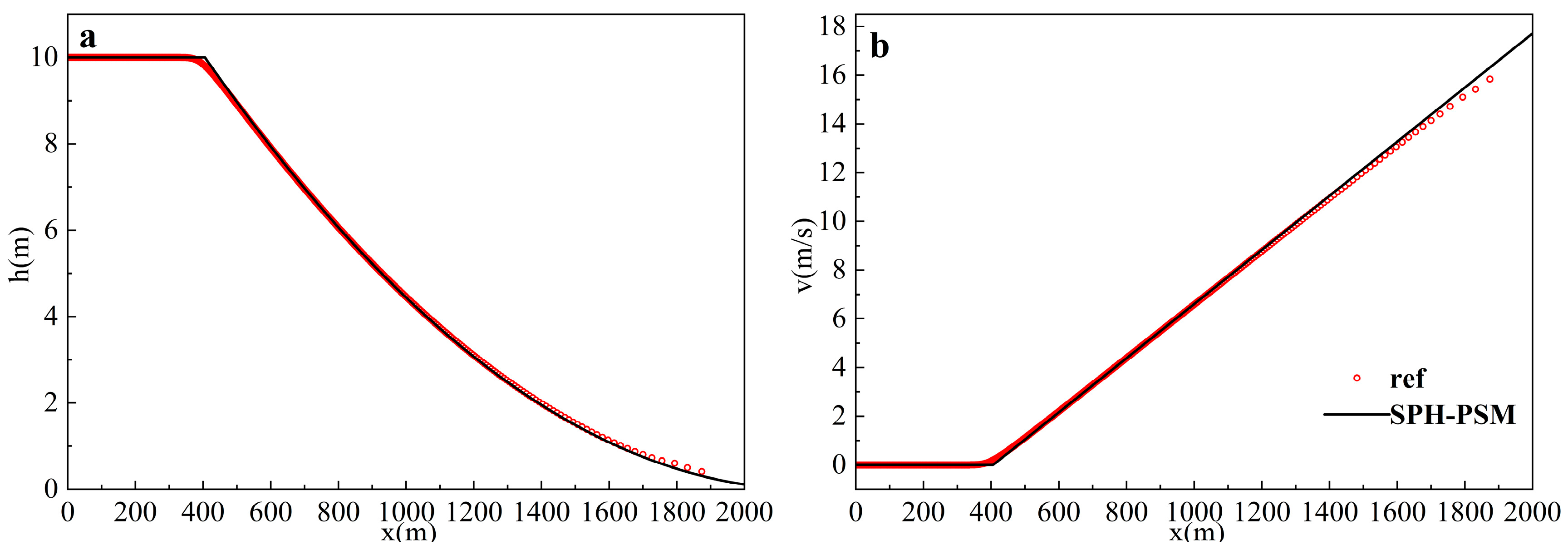
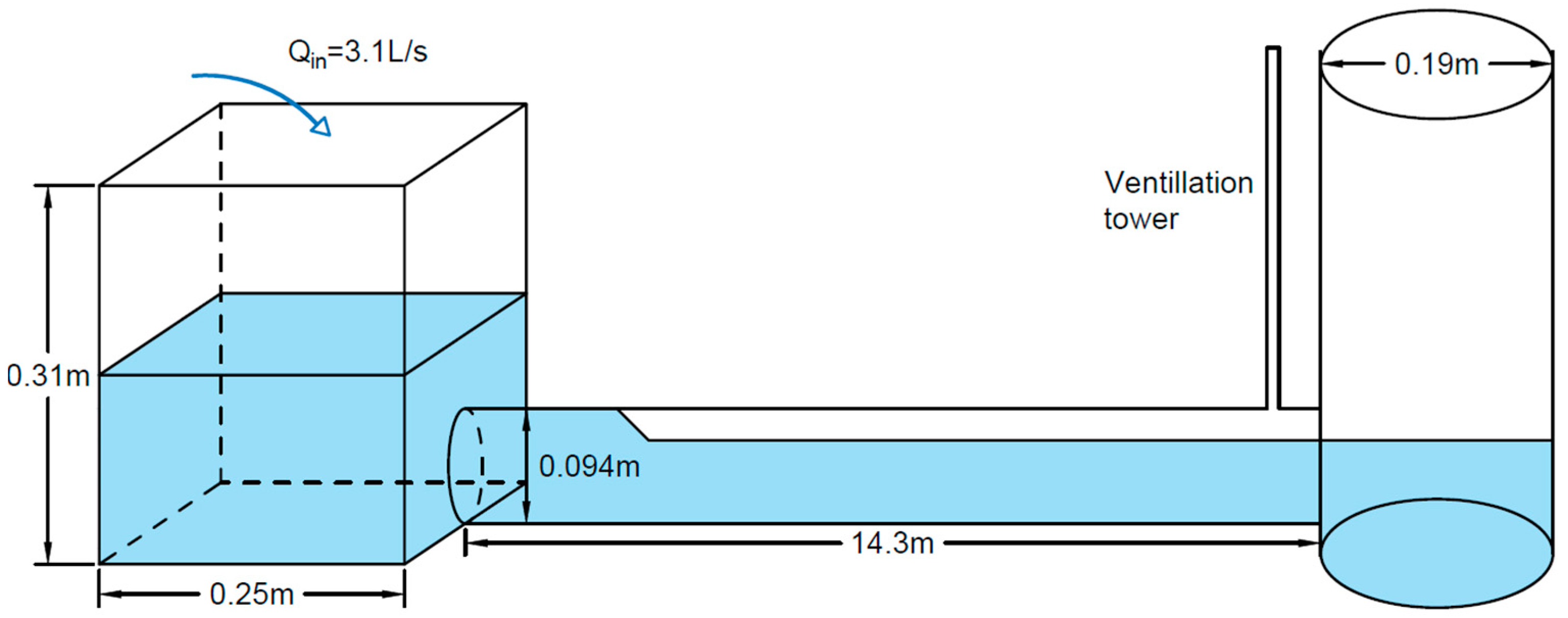
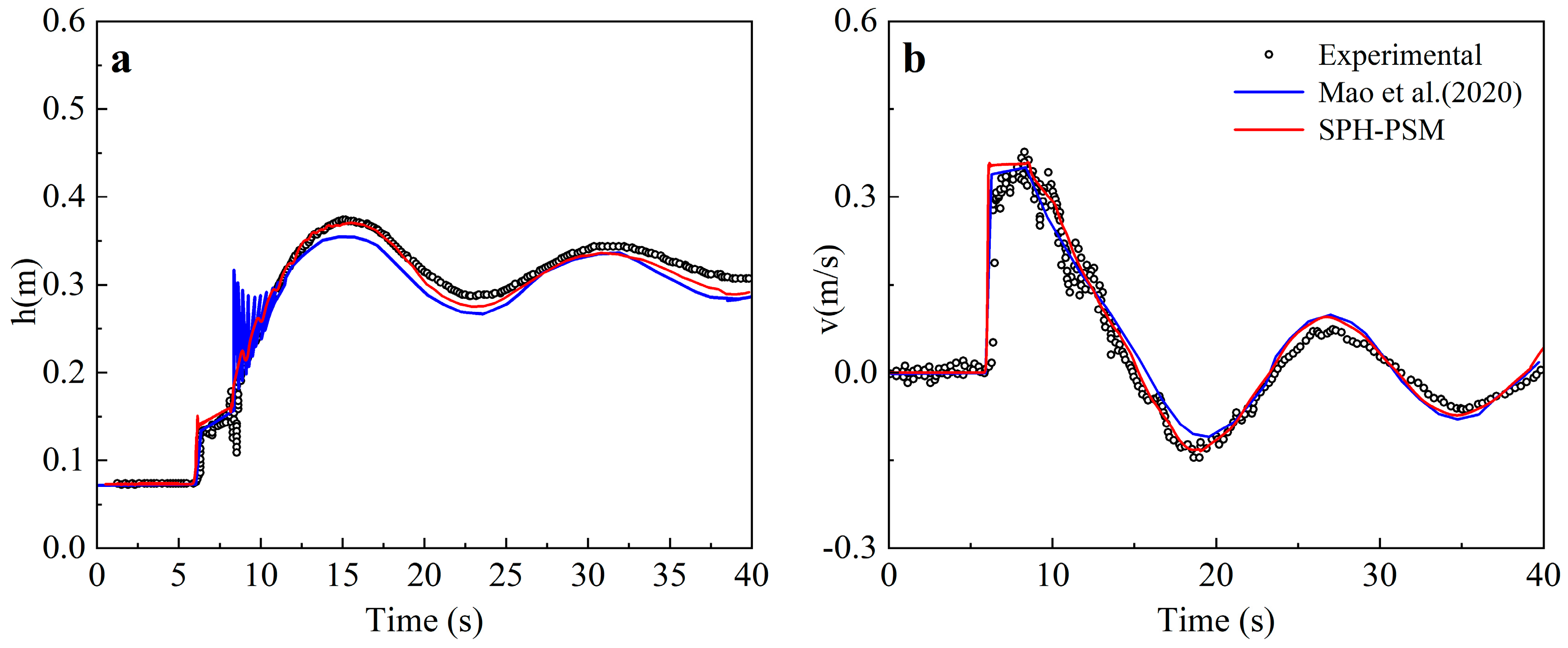
- Case 4: Single Drainage Pipe Case
4. Conclusions
- (1)
- The newly proposed SPH-PSM model demonstrates its effectiveness in accurately simulating complex transient flow regimes.
- (2)
- The recommended model parameters for SPH-PSM are specified as follows: (a) the B-spline kernel function is more appropriate in the SPH-PSM model; (b) the recommended smoothing length is (1.1–1.5) to balance stability and accuracy; (c) the density diffusion coefficient can suppress the numerical oscillations while potentially compromising mass conservation, which is recommended as 0.1–0.3, while a larger is recommended for intense mixed flows; (d) among different numerical integration methods, the Euler method proves to be superior in terms of computation time and accuracy; (e) to maintain a balance between stability, accuracy, and efficiency, a Courant number less than 0.5 is recommended; (f) the choice of pressure wave celerity affects not only the numerical oscillation but also the position of the shock and the piezometric head, which is recommended as 30 m/s; meanwhile, in the pure pressurized flow, the true acoustic velocity should be chosen to ensure accuracy.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| Latin letters: | |
| Pressure wave celerity | |
| Flow area | |
| Cross-sectional area | |
| Pipe inner diameter | |
| Gravitational acceleration | |
| Smoothing length | |
| Additional head of the pipe | |
| Local head loss term | |
| Hydrostatic pressure term | |
| Accuracy evaluate norm formula | |
| The initial particle number | |
| Flow discharge rate | |
| The bottom slope | |
| Friction slope | |
| Time | |
| Slot width | |
| Velocity vector | |
| Kernel function | |
| The first-order gradient of kernel function | |
| Corrected kernel function | |
| The first-order corrected gradient of kernel function | |
| Initial spacing between particles | |
| Bottom elevation | |
| Greek letters: | |
| Angle between the free surface and the center of the pipe | |
| The density diffusion coefficient | |
| Artificial viscosity | |
| Courant number | |
| Local head loss term coefficient | |
| Acronyms: | |
| CFL | Courant–Friedrichs–Lewy condition |
| CSPH | The Corrective SPH |
| FDM | Finite Difference Method |
| FVM | Finite Volume Method |
| MOC | Method of Characteristics |
| PIC | Particle in cell |
| PSM | The Preissmann Slot Method |
| RK2 | The Second Order Runge–Kutta method |
| SPH | The Smoothed Particle Hydrodynamics |
| UDSs | Urban drainage systems |
References
- Aureli, F.; Dazzi, S.; Maranzoni, A.; Mignosa, P. Validation of single- and two-equation models for transient mixed flows: A laboratory test case. J. Hydraul. Res. 2015, 53, 440–451. [Google Scholar] [CrossRef]
- Trajkovic, B.; Ivetic, M.; Calomino, F.; D’Ippolito, A. Investigation of transition from free surface to pressurized flow in a circular pipe. Water Sci. Technol. 1999, 39, 105–112. [Google Scholar] [CrossRef]
- Vasconcelos, J.G.; Wright, S.J.; Roe, P.L. Improved simulation of flow regime transition in sewers: Two-component pressure approach. J. Hydraul. Eng. 2006, 132, 553–562. [Google Scholar] [CrossRef]
- Chitwatkulsiri, D.; Miyamoto, H. Real-Time Urban Flood Forecasting Systems for Southeast Asia—A Review of Present Modelling and Its Future Prospects. Water 2023, 15, 178. [Google Scholar] [CrossRef]
- Elliott, A.H.; Trowsdale, S.A. A review of models for low impact urban stormwater drainage. Environ. Modell. Softw. 2007, 22, 394–405. [Google Scholar] [CrossRef]
- Farina, A.; Di Nardo, A.; Gargano, R.; van der Werf, J.A.; Greco, R. A simplified approach for the hydrological simulation of urban drainage systems with SWMM. J. Hydrol. 2023, 623, 129757. [Google Scholar] [CrossRef]
- Bousso, S.; Daynou, M.; Fuamba, M. Numerical Modeling of Mixed Flows in Storm Water Systems: Critical Review of Literature. J. Hydraul. Eng. 2013, 139, 385–396. [Google Scholar] [CrossRef]
- Li, F.; Yan, J.; Yan, H.; Tao, T.; Duan, H.-F. 2D Modelling and energy analysis of entrapped air-pocket propagation and spring-like geysering in the drainage pipeline system. Eng. Appl. Comput. Fluid Mech. 2023, 17, 2227662. [Google Scholar] [CrossRef]
- Cunge, J.A.; Wegner, M. Numerical integration of Barré de Saint-Venant’s flow equations by means of an implicite scheme of finite differences. La Houille Blanche 1964, 50, 33–39. [Google Scholar] [CrossRef]
- Kerger, F.; Archambeau, P.; Erpicum, S.; Dewals, B.J.; Pirotton, M. A fast universal solver for 1D continuous and discotinuous steady flows in rivers and pipes. Int. J. Numer. Methods Fluids 2011, 66, 38–48. [Google Scholar] [CrossRef]
- Li, J.; McCorquodale, A. Modeling mixed flow in storm sewers. J. Hydraul. Eng. 1999, 125, 1170–1180. [Google Scholar] [CrossRef]
- Huang, B.; Zhu, D.Z. Rigid-column model for rapid filling in a partially filled horizontal pipe. J. Hydraul. Eng. 2021, 147, 06020018. [Google Scholar] [CrossRef]
- An, H.; Lee, S.; Noh, S.J.; Kim, Y.; Noh, J. Hybrid Numerical Scheme of Preissmann Slot Model for Transient Mixed Flows. Water 2018, 10, 899. [Google Scholar] [CrossRef]
- Henau, V.D.; Raithby, G. A transient two-fluid model for the simulation of slug flow in pipelines—II. Validation. Int. J. Multiph. Flow 1995, 21, 351–364. [Google Scholar] [CrossRef]
- Sharior, S.; Hodges, B.; Vasconcelos, J.G. Generalized, Dynamic, and Transient-Storage Form of the Preissmann Slot. J. Hydraul. Eng. 2023, 149, 04023046. [Google Scholar] [CrossRef]
- León, A.S.; Ghidaoui, M.S.; Schmidt, A.R.; García, M.H. Godunov-type solutions for transient flows in sewers. J. Hydraul. Eng. 2006, 132, 800–813. [Google Scholar] [CrossRef]
- Kerger, F.; Archambeau, P.; Erpicum, S.; Dewals, B.J.; Pirotton, M. An exact Riemann solver and a Godunov scheme for simulating highly transient mixed flows. J. Comput. Appl. Math. 2011, 235, 2030–2040. [Google Scholar] [CrossRef]
- Chaudhry, M.H. Open-Channel Flow; Springer: Berlin/Heidelberg, Germany, 2008; Volume 523. [Google Scholar]
- Ye, T.; Pan, D.; Huang, C.; Liu, M. Smoothed particle hydrodynamics (SPH) for complex fluid flows: Recent developments in methodology and applications. Phys. Fluids 2019, 31, 011301. [Google Scholar] [CrossRef]
- Monaghan, J.J. Simulating free surface flows with SPH. J. Comput. Phys. 1994, 110, 399–406. [Google Scholar] [CrossRef]
- Swegle, J.; Attaway, S. On the feasibility of using smoothed particle hydrodynamics for underwater explosion calculations. Comput. Mech. 1995, 17, 151–168. [Google Scholar] [CrossRef]
- Salis, N.; Luo, M.; Reali, A.; Manenti, S. Wave generation and wave-structure impact modelling with WCSPH. Ocean Eng. 2022, 266, 113228. [Google Scholar] [CrossRef]
- Chang, T.J.; Chang, K.H. SPH Modeling of One-Dimensional Nonrectangular and Nonprismatic Channel Flows with Open Boundaries. J. Hydraul. Eng. 2013, 139, 1142–1149. [Google Scholar] [CrossRef]
- Chang, K.H.; Chang, T.J. A well-balanced and positivity-preserving SPH method for shallow water flows in open channels. J. Hydraul. Res. 2021, 59, 903–916. [Google Scholar] [CrossRef]
- Pan, T.W.; Zhou, L.; Ou, C.Q.; Wang, P.; Liu, D.Y. Smoothed Particle Hydrodynamics with Unsteady Friction Model for Water Hammer Pipe Flow. J. Hydraul. Eng. 2022, 148, 04021057. [Google Scholar] [CrossRef]
- Wieth, L.; Kelemen, K.; Braun, S.; Koch, R.; Bauer, H.J.; Schuchmann, H.P. Smoothed Particle Hydrodynamics (SPH) simulation of a high-pressure homogenization process. Microfluid. Nanofluid 2016, 20, 42. [Google Scholar] [CrossRef]
- Zhou, M.J.; Shi, Z.M.; Peng, C.; Peng, M.; Cui, K.F.E.; Li, B.; Zhang, L.M.; Zhou, G.G.D. Two-phase modelling of erosion and deposition process during overtopping failure of landslide dams using GPU-accelerated ED-SPH. Comput. Geotech. 2024, 166, 105944. [Google Scholar] [CrossRef]
- Nomeritae, N.; Bui, H.H.; Daly, E. Modeling Transitions between Free Surface and Pressurized Flow with Smoothed Particle Hydrodynamics. J. Hydraul. Eng. 2018, 144, 04018012. [Google Scholar] [CrossRef]
- Song, W.K.; Yan, H.X.; Tao, T.; Guan, M.F.; Li, F.; Xin, K.L. Modeling Transient Mixed Flows in Drainage Networks With Smoothed Particle Hydrodynamics. Water Resour. Manag. 2024, 38, 861–879. [Google Scholar] [CrossRef]
- Preissmann, A. Propagation des Intumescences Dans Lescanaux et Rivieres; 1st Cong. French Assoc. for Computation: Grenoble, France, 1961. [Google Scholar]
- Liu, G.-R.; Liu, M.B. Smoothed Particle Hydrodynamics: A Meshfree Particle Method; World Scientific: Singapore, 2003. [Google Scholar]
- Bonet, J.; Lok, T.S.L. Variational and momentum preservation aspects of Smooth Particle Hydrodynamic formulations. Comput. Methods Appl. Mech. Eng. 1999, 180, 97–115. [Google Scholar] [CrossRef]
- Chen, J.K.; Beraun, J.E.; Carney, T.C. A corrective smoothed particle method for boundary value problems in heat conduction. Int. J. Numer. Methods Eng. 1999, 46, 231–252. [Google Scholar] [CrossRef]
- Monaghan, J.J.; Gingold, R.A. Shock Simulation by the Particle Method Sph. J. Comput. Phys. 1983, 52, 374–389. [Google Scholar] [CrossRef]
- Lahiri, S.K.; Bhattacharya, K.; Shaw, A.; Ramachandra, L.S. A stable SPH with adaptive B-spline kernel. J. Comput. Phys. 2020, 422, 109761. [Google Scholar] [CrossRef]
- Yang, X.F.; Peng, S.L.; Liu, M.S. A new kernel function for SPH with applications to free surface flows. Appl. Math. Model. 2014, 38, 3822–3833. [Google Scholar] [CrossRef]
- Ata, R.; Soulaïmani, A. A stabilized SPH method for inviscid shallow water flows. Int. J. Numer. Methods Fluids 2005, 47, 139–159. [Google Scholar] [CrossRef]
- Chang, K.H.; Sheu, T.W.H.; Chang, T.J. A 1D-2D coupled SPH-SWE model applied to open channel flow simulations in complicated geometries. Adv. Water Resour. 2018, 115, 185–197. [Google Scholar] [CrossRef]
- Vacondio, R.; Rogers, B.; Stansby, P. Smoothed Particle Hydrodynamics: Approximate zero-consistent 2-D boundary conditions and still shallow-water tests. Int. J. Numer. Methods Fluids 2012, 69, 226–253. [Google Scholar] [CrossRef]
- Mabssout, M.; Herreros, M.I. Runge-Kutta vs Taylor-SPH: Two time integration schemes for SPH with application to Soil Dynamics. Appl. Math. Model. 2013, 37, 3541–3563. [Google Scholar] [CrossRef]
- Federico, I.; Marrone, S.; Colagrossi, A.; Aristodemo, F.; Antuono, M. Simulating 2D open-channel flows through an SPH model. Eur. J. Mech.-B/Fluids 2012, 34, 35–46. [Google Scholar] [CrossRef]
- Song, W.K.; Yan, H.X.; Li, F.; Tao, T.; Duan, H.F.; Xin, K.L.; Li, S.P. Development of Smoothed Particle Hydrodynamics based water hammer model for water distribution systems. Eng. Appl. Comput. Fluid Mech. 2023, 17, 2171139. [Google Scholar] [CrossRef]
- Dazzi, S.; Maranzoni, A.; Mignosa, P. Local time stepping applied to mixed flow modelling. J. Hydraul. Res. 2016, 54, 145–157. [Google Scholar] [CrossRef]
- Issakhov, A.; Zhandaulet, Y.; Abylkassymova, A. Numerical Study of the Water Surface Movement during a Dam Break on a Slope with Cascade Dike from Sediment. Water Resour. Manag. 2022, 36, 3435–3461. [Google Scholar] [CrossRef]
- Sanders, B.F.; Bradford, S.F. Network implementation of the two-component pressure approach for transient flow in storm sewers. J. Hydraul. Eng. 2011, 137, 158–172. [Google Scholar] [CrossRef]
- Mao, Z.H.; Guan, G.H.; Yang, Z.H. Suppress Numerical Oscillations in Transient Mixed Flow Simulations with a Modified HLL Solver. Water 2020, 12, 1245. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test Case | (m) | (m/s) | (m) | (m/s) | Study Parameter |
|---|---|---|---|---|---|
| T1 | 3.0 | 0 | 0.5 | 0 | SPH-related |
| T2 | 1.8 | 0.9 | 0.8 | −1.0 | SPH-related |
| T3 | 0.8 | 2.0 | 0.8 | −2.0 | PSM-related |
| 0.25 | 0.5 | 0.7 | 0.9 | |
|---|---|---|---|---|
| CPU time(s) of T1 | 4.8606 | 1.3216 | 1.0365 | 0.9318 |
| CPU time(s) of T2 | 2.9158 | 0.9700 | 0.6997 | 0.6245 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, Y.; Yan, H.; Li, S.; Song, W.; Li, F.; Duan, H.; Xin, K.; Tao, T. Development of Pipeline Transient Mixed Flow Model with Smoothed Particle Hydrodynamics Based on Preissmann Slot Method. Water 2024, 16, 1108. https://doi.org/10.3390/w16081108
Yang Y, Yan H, Li S, Song W, Li F, Duan H, Xin K, Tao T. Development of Pipeline Transient Mixed Flow Model with Smoothed Particle Hydrodynamics Based on Preissmann Slot Method. Water. 2024; 16(8):1108. https://doi.org/10.3390/w16081108
Chicago/Turabian StyleYang, Yixin, Hexiang Yan, Shixun Li, Wenke Song, Fei Li, Huanfeng Duan, Kunlun Xin, and Tao Tao. 2024. "Development of Pipeline Transient Mixed Flow Model with Smoothed Particle Hydrodynamics Based on Preissmann Slot Method" Water 16, no. 8: 1108. https://doi.org/10.3390/w16081108