Abstract
For solving the large sparse generalized absolute value equations, recently a Newton-based accelerated over-relaxation (NAOR) method was investigated. In this paper, we widen the convergence regions for the parameters and establish a new convergence theorem of the NAOR method when the system matrix is an -matrix. Numerical examples demonstrate that the NAOR method has a better convergence performance when the parameters are taken according to the proposed convergence theorem.
1. Introduction
Consider the generalized absolute value equation (GAVE)
where , and denotes the component-wise absolute value of the vector x. When with I denoting the identity matrix, the GAVE becomes the absolute value equation . The GAVE was introduced by Rohn [1] and further investigated in [2,3,4]. Many problems of scientific computing and engineering applications, such as interval linear equations [5] and linear complementarity problems [6,7,8] can be equivalently transformed into the GAVE.
There exist many efficient numerical methods for the GAVE; e.g., see [9,10,11,12,13,14,15,16,17,18], and references therein. Recently, Zhou et al. proposed a Newton-based matrix splitting (NMS) method by using the matrix technique [19]. Based on the different matrix splittings, the NMS method provides a general framework of Newton-based matrix splitting methods. As a special case of the NMS method, the Newton-based accelerated over-relaxation (NAOR) method is given as follows.
Method 1 (The NAOR method [19]). Let be a splitting of the matrix A with
where and are the diagonal, the strictly lower-triangular, and the strictly upper-triangular matrices of A, respectively. Assume that is an arbitrary initial guess. For until the iteration sequence is convergent, computing by
where is invertible and is a given matrix.
For , and , the NAOR method reduces the Newton-based successive over-relaxation (NSOR) method, the Newton-based Gauss–Seidel (NGS) method and the Newton-based Jacobi (NJ) method, respectively.
From Theorem 4.5 in [19], one can observe that the associated convergence conditions have not taken into account the choice of and the upper bounds of are smaller than 2. However, our numerical tests reveal that better performance of the NAOR method can be obtained for larger than 2. This motivates us to look for some new convergence conditions of the NAOR method, which have the following properties:
- (i)
- Based on the choice of , widen the convergence regions for the parameters and such that their optimal values can be included inside;
- (ii)
- With the above new convergence conditions, the NAOR method can obtain better convergence performance.
The rest of this paper is organized as follows. In Section 2, we introduce some notations, necessary definitions, and auxiliary results. In Section 3, an improved convergence theorem for the NAOR method is proved. Two numerical experiments and some concluding remarks are given in Section 4 and Section 5, respectively.
2. Preliminaries
Some notations, definitions, and basic results are given as follows, which can be found in [20,21].
For two real matrices and , we write if for all and . A matrix is said to be nonnegative (positive) if the entries satisfy for all and . Let be the absolute of the matrix A, and be its transpose. These notations apply to vectors in as well.
Let A be a square matrix and be its spectral radius. Its comparison matrix is defined by if and if . The matrix A is called a Z-matrix if all of its off-diagonal entries are non-positive, an M-matrix if it is a Z-matrix with , and an H-matrix if its comparison matrix is an M-matrix. An H-matrix with positive diagonal entries is called an -matrix. If A is an M-matrix and B is a Z-matrix, then implies that B is an M-matrix.
Lemma 1
([20]). Let be an H-matrix, then A is nonsingular and .
Lemma 2
([22]). Let be a Z-matrix. Then the following statements are equivalent:
- (i)
- A is an M-matrix;
- (ii)
- If the representation satisfies that , then
3. Improved Convergence Theorem
In this section, we will establish a new convergence theorem of the NAOR method.
Theorem 1.
and
Letand A be an-matrix withsatisfying, where, andare the diagonal, the strictly lower-triangular and the strictly upper-triangular matrices of A, respectively. Assume that Ω is a positive diagonal matrix, then for any initial vector,
- (i)
- the NAOR method is convergent provided that α and β satisfy
respectively.
- (ii)
- The NSOR method is convergent for α satisfying (3);
- (iii)
- Both the NGS method and the NJ method are convergent.
Proof.
We only need to verify the validity of since the others are special cases. Let
where M and N are given as in (2). From Corollary 4.1 in [19], one only needs to prove
which is a sufficient convergence condition for the NAOR method.
Firstly, we will prove that the Z-matrix is an M-matrix. By substituting (2), the matrices and can be rewritten as
A simple computation gives that with
From (3), it follows that . Obviously, and By Lemma 2, is an M-matrix if and only if . For this, we distinguish the following two cases according to (4).
Case 1: The parameter satisfies that with .
For this case, it holds that . Combining (3) and the assumption , we obtain
Case 2: The parameter satisfies that .
For this case, it follows that
Applying the monotonicity of the spectral radius of the nonnegative matrix and (3) gives
which, together with the assumption , implies that .
From Cases 1–2, we have proved that is an M-matrix for and satisfying (3) and (4). Together with the fact that , it follows that is an M-matrix, i.e., is an -matrix. This implies that
where the second inequality of (7) follows from Lemma 1. Note that and . From Lemma 2, we immediately obtain that . Moreover, the second inequality of (7) gives
from which the convergence condition (5) holds. This proof is completed. □
Remark 1.
Comparing Theorem 1 with Theorem 4.5 in [19], we give the following remarks.
- (i)
- In the proofs of the above two theorems, the key is to prove that is an M-matrix. In Theorem 4.5 in [19], is defined as , where is given by (6) and
- (ii)
- In Theorem 4.5 of [19], the convergence conditions on the parameters can be rewritten asComparing (9) with (3), (4), we see easily that Theorem 1 gives a wider convergence region for α and β than Theorem 4.5 in [19]. Thus, the NAOR method may have better performance by choosing the appropriate values of α and β according to (3) and (4). This means that Theorem 1 improves Theorem 4.5 in [19].
4. Numerical Results
In this section, we use the first two examples in [19] to examine the effectiveness of Theorem 1 for the NSOR method from three aspects: the number of iteration steps (denoted by ‘IT’), the elapsed CPU time in seconds (denoted by ‘CPU’), and the norm of the relative residual vectors (denoted by ‘RES’). Here, ‘RES’ is defined as
where is the k-th approximate solution to the GAVE. All numerical experiments were performed in a MATLAB environment with double machine precision. In our tests, all initial vectors were chosen as
and all iterations were terminated once .
Next, we tested two special linear complementarity problems (LCP), i.e., Examples 1 and 2 in [19], which was also given in [23,24]. As an important application of the GAVE, the LCP() is to find the vector z, such that
with . Set
the LCP() is equivalently transformed into the GAVE.
For simplicity, we use notations and to denote the associated block-tridiagonal and tridiagonal matrices, respectively.
Example 1
(Zhou et al. [19], Example 1). Let m be a positive integer and . Consider the LCP() with and , where
and is the unique solution of the LCP().
Example 2
(Zhou et al. [19], Example 2). Let m be a positive integer and . Consider the LCP() with and , where
and is the unique solution of the LCP().
For Examples 1 and 2 with , since both the system matrices are M-matrices, the associated LCPs have the unique solutions by [7]. Moreover, their equivalent GAVEs (1) have also the unique solutions by (10).
According to Theorem 1, the NSOR method will converge to the unique solution for and satisfying the conditions (3). In the numerical tests, we set , which naturally satisfies (3). From this case, the NSOR method converges for .
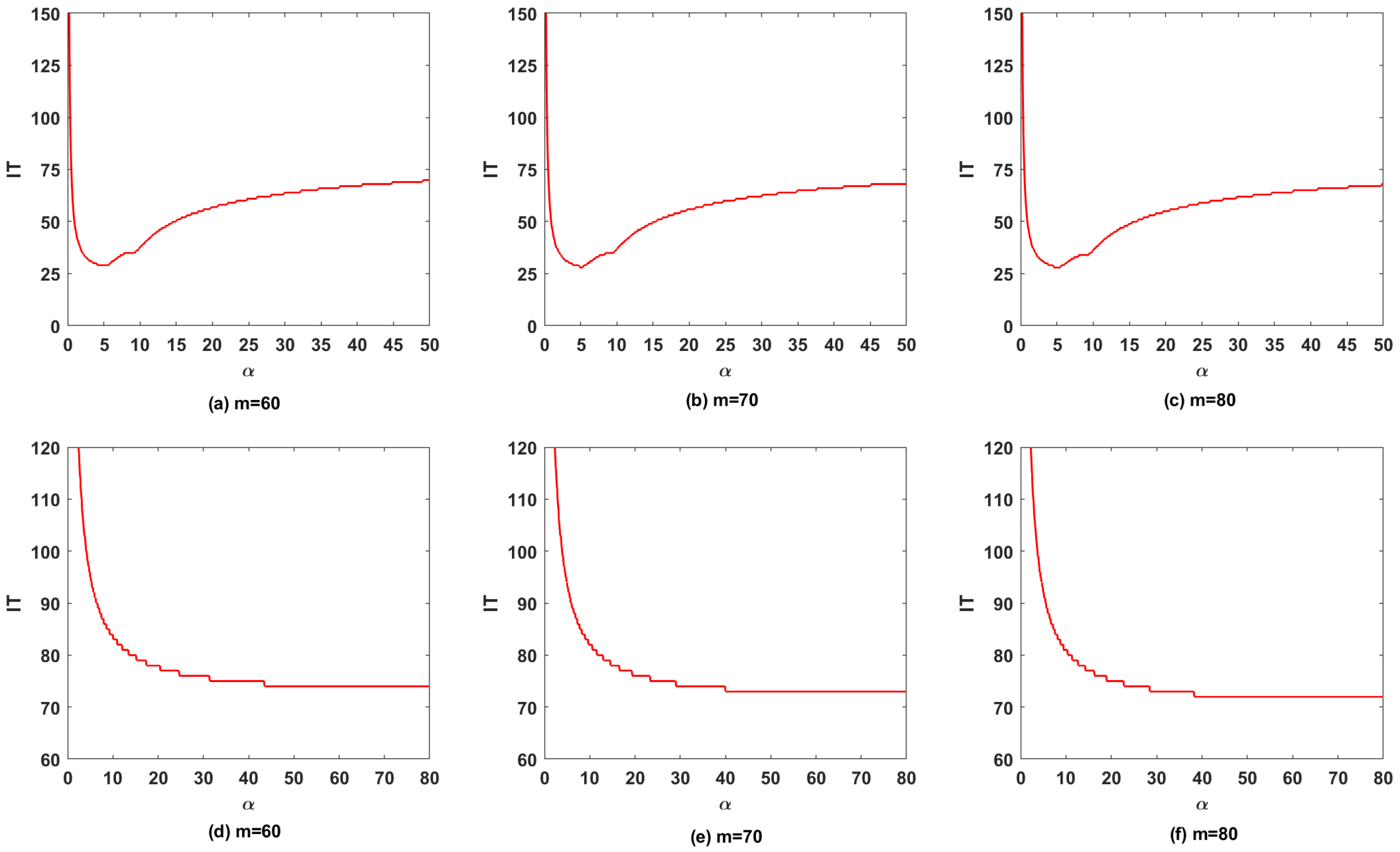
To further obtain the suitable range of , the NSOR method is applied for the different scale problems with the changed . The test results are demonstrated in Figure 1. From Figure 1, one can obverse that the iteration steps depend on the values of but are nearly independent of the sizes of the test problems. In particular, the iteration steps tend to stabilize when for Example 1 and for Example 2. On the other hand, we observe that the NSOR method can attain its minimum iteration steps with near to 5 for Example 1 and 50 for Example 2, respectively. This means that the convergence regions for by Theorem 4.5 in [19] are too small to contain its optimal values. Therefore, we will take for Example 1 and for Example 2 in the numerical test, respectively.
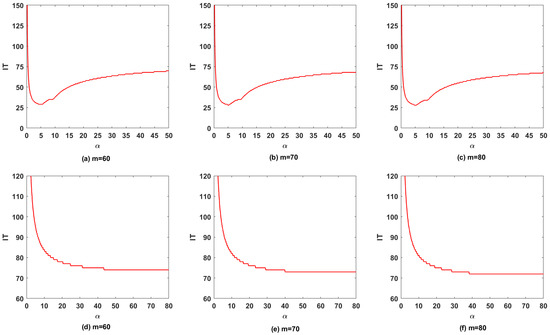
Figure 1.
The iteration steps of the NSOR method with and the different : (a–c) for Example 1 and (d–f) for Example 2 with .
The numerical results of the NSOR method with different sizes are given in Table 1, where and are obtained experimentally from the different convergence regions for by minimizing the associated iteration steps. Based on the above analysis, is chosen in the interval for Example 1 and for Example 2, respectively. For comparison, we also list the results in [19], where and are taken from the interval .

Table 1.
Numerical results of the NSOR method for Examples 1 and 2 with = −1.
- (1)
- In terms of both the CPU times and the iteration steps, the NSOR method with and is always superior to the one with and . This means that the proposed convergence theorem improves Theorem 4.5 in [19] by taking the suitable values of in a wider convergence region. In particular, the former has much less CPU time than the latter since the matrix is taken as instead of tridiagonal matrix in [19].
- (2)
- The iteration steps are nearly independent of the scale of the test problems. Hence, a strategy of choosing or involves testing the small-scale problems and using them to the larger-scale problems.
5. Concluding Remarks
In this paper, we investigated the new convergence conditions of the NAOR method for solving the GAVE. By considering the relationship between and the parameter , we widened the convergence regions for the two parameters. Numerical results show that the NAOR method can obtain faster convergence when the appropriate parameters are chosen according to Theorem 1 instead of Theorem 4.5 in [19].
In numerical tests, the NSOR method can attain the convergence rate nearly independent of the scale of problems. However, it is difficult to prove independence in theory. Moreover, determining optimal parameters is still a challenging problem. We will further study these interesting topics in the future.
Author Contributions
Investigation, R.C. and X.P.; writing—original draft preparation, R.C.; writing—review and editing, X.P. and W.Y.; supervision, X.P. All authors have read and agreed to the published version of the manuscript.
Funding
The work was supported by Guangdong Basic and Applied Basic Research Foundation, no. 2021A1515012032, 2022A1515011123, the National Natural Science Foundation of China under grant nos. 12071159, U1811464, 11801097 and Foundation of Department of Education of Guangdong Province No. 2020ZDZX3004.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The datasets generated during and/or analysed during the current study are available from the corresponding author on reasonable request.
Acknowledgments
The authors would like to thank the anonymous referees for their valuable comments and suggestions, which greatly improved the paper.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Rohn, J. A theorem of the alternative for the equation Ax + B|x| = b. Linear Multilinear Algebra 2004, 52, 421–426. [Google Scholar] [CrossRef] [Green Version]
- Mangasarian, O.L.; Meyer, R.R. Absolute value equations. Linear Algebra Appl. 2006, 419, 359–367. [Google Scholar] [CrossRef] [Green Version]
- Mangasarian, O.L. Absolute value programming. Comput. Optim. Appl. 2007, 36, 43–53. [Google Scholar] [CrossRef]
- Rohn, J. On unique solvability of the absolute value equation. Optim. Lett. 2009, 3, 603–606. [Google Scholar] [CrossRef]
- Rohn, J. System of linear interval equations. Linear Algebra Appl. 1989, 126, 39–78. [Google Scholar] [CrossRef] [Green Version]
- Cottle, R.W.; Dantzig, G. Complementary pivot theory of mathematical programming. Linear Algebra Appl. 1968, 1, 103–125. [Google Scholar] [CrossRef] [Green Version]
- Cottle, R.W.; Pang, J.-S.; Stone, R.E. The Linear Complementarity Problem; Academic Press: San Diego, CA, USA, 1992. [Google Scholar]
- Ferris, M.C.; Pang, J.-S. Engineering and economic applications of complementarity problems. SIAM Rev. 1997, 39, 669–713. [Google Scholar] [CrossRef] [Green Version]
- Mangasarian, O.L. A generalized Newton method for absolute value equations. Optim. Lett. 2009, 3, 101–108. [Google Scholar] [CrossRef]
- Hu, S.-L.; Huang, Z.-H.; Zhang, Q. A generalized Newton method for absolute value equations associated with second order cones. J. Comput. Appl. Math. 2011, 235, 1490–1501. [Google Scholar] [CrossRef]
- Rohn, J.; Hooshyarbakhsh, V.; Farhadsefat, R. An iterative method for solving absolute value equations and sufficient conditions for unique solvability. Optim. Lett. 2014, 8, 35–44. [Google Scholar] [CrossRef]
- Salkuyeh, D.K. The Picard-HSS iteration method for absolute value equations. Optim. Lett. 2014, 8, 2191–2202. [Google Scholar] [CrossRef]
- Li, C.-X. A modified generalized Newton method for absolute value equations. J. Optim. Theory. Appl. 2016, 170, 1055–1059. [Google Scholar] [CrossRef]
- Wang, A.; Cao, Y.; Chen, J.-X. Modified Newton-type iteration methods for generalized absolute value equations. J. Optim. Theory Appl. 2019, 181, 216–230. [Google Scholar] [CrossRef]
- Ke, Y.-F.; Ma, C.-F. SOR-like iteration method for solving absolute value equations. Appl. Math. Comput. 2017, 311, 195–202. [Google Scholar] [CrossRef]
- Guo, P.; Wu, S.-L.; Li, C.-X. On the SOR-like iteration method for solving absolute value equations. Appl. Math. Lett. 2019, 97, 107–113. [Google Scholar] [CrossRef]
- Dong, X.; Shao, X.-H.; Shen, H.-L. A new SOR-like method for solving absolute value equations. Appl. Numer. Math. 2020, 156, 410–421. [Google Scholar] [CrossRef]
- Huang, B.-H.; Li, W. A modified SOR-like method for absolute value equations associated with second order cones. J. Comput. Appl. Math. 2022, 400, 113745. [Google Scholar] [CrossRef]
- Zhou, H.-Y.; Wu, S.-L.; Li, C.-X. Newton-based matrix splitting method for generalized absolute value equation. J. Comput. Appl. Math. 2021, 394, 113578. [Google Scholar] [CrossRef]
- Berman, A.; Plemmons, R.J. Nonnegative Matrix in the Mathematical Sciences; Academic Press: New York, NY, USA, 1979. [Google Scholar]
- Bai, Z.-Z. On the convergence of the multisplitting methods for the linear complementarity problem. SIAM J. Matrix Anal. Appl. 1999, 21, 67–78. [Google Scholar] [CrossRef]
- Plemmons, R.J. M-matrix characterizations. I-Nonsingular M-Matrices. Linear Algebra Appl. 1977, 18, 175–188. [Google Scholar] [CrossRef] [Green Version]
- Dong, J.-L.; Jiang, M.-Q. A modified modulus method for symmetric positive-definite linear complementarity problems. Numer. Linear Algebra Appl. 2009, 16, 129–143. [Google Scholar] [CrossRef]
- Bai, Z.-Z. Modulus-based matrix splitting iteration methods for linear complementarity problems. Numer. Linear Algebra Appl. 2010, 17, 917–933. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).