



A Coordinated Control Strategy of Multi-Type Flexible Resources and Under-Frequency Load Shedding for Active Power Balance



Abstract
1. Introduction
2. Materials and Methods
2.1. Controllable Resources Participating in Frequency Response
2.1.1. Inertia Analysis
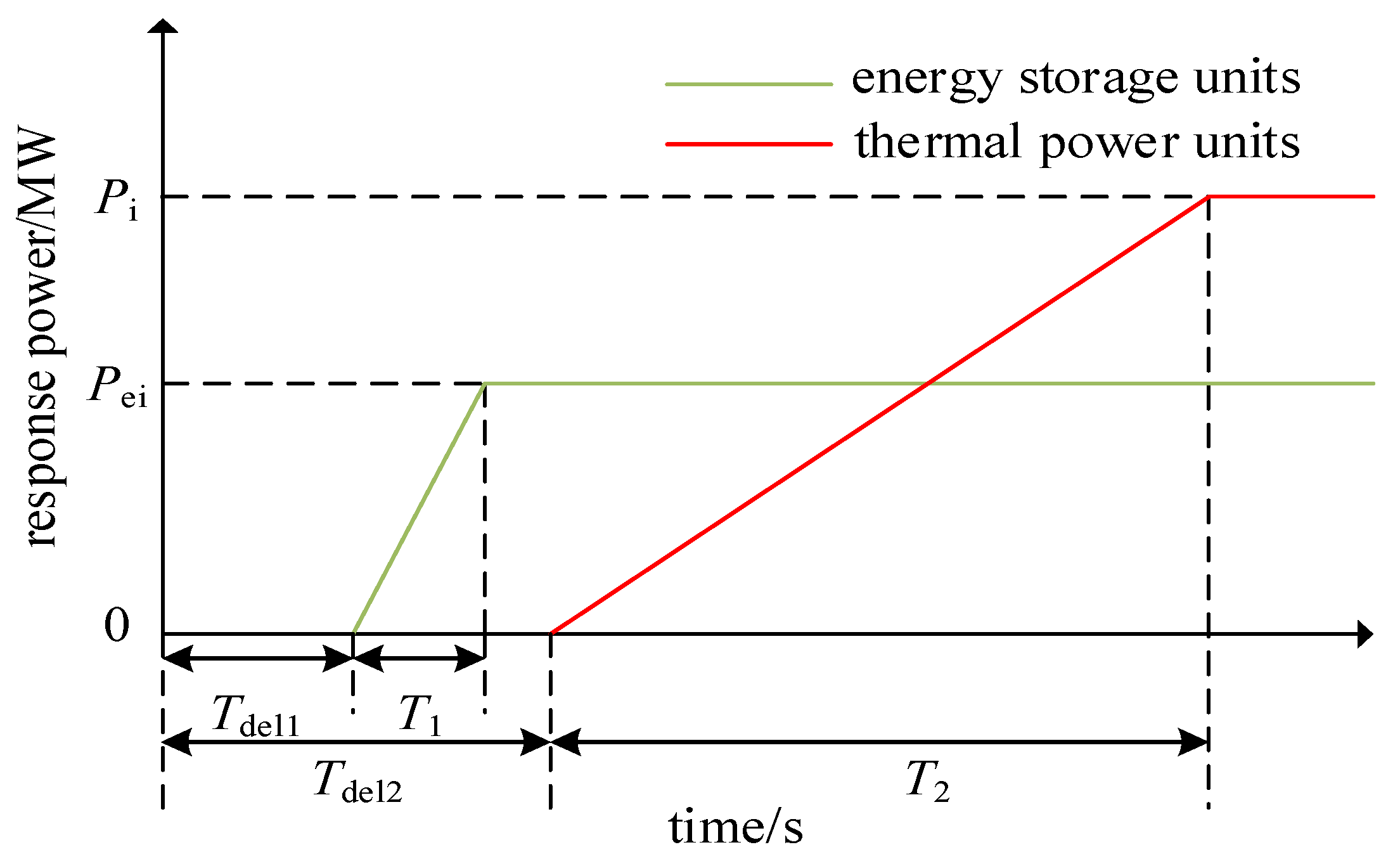
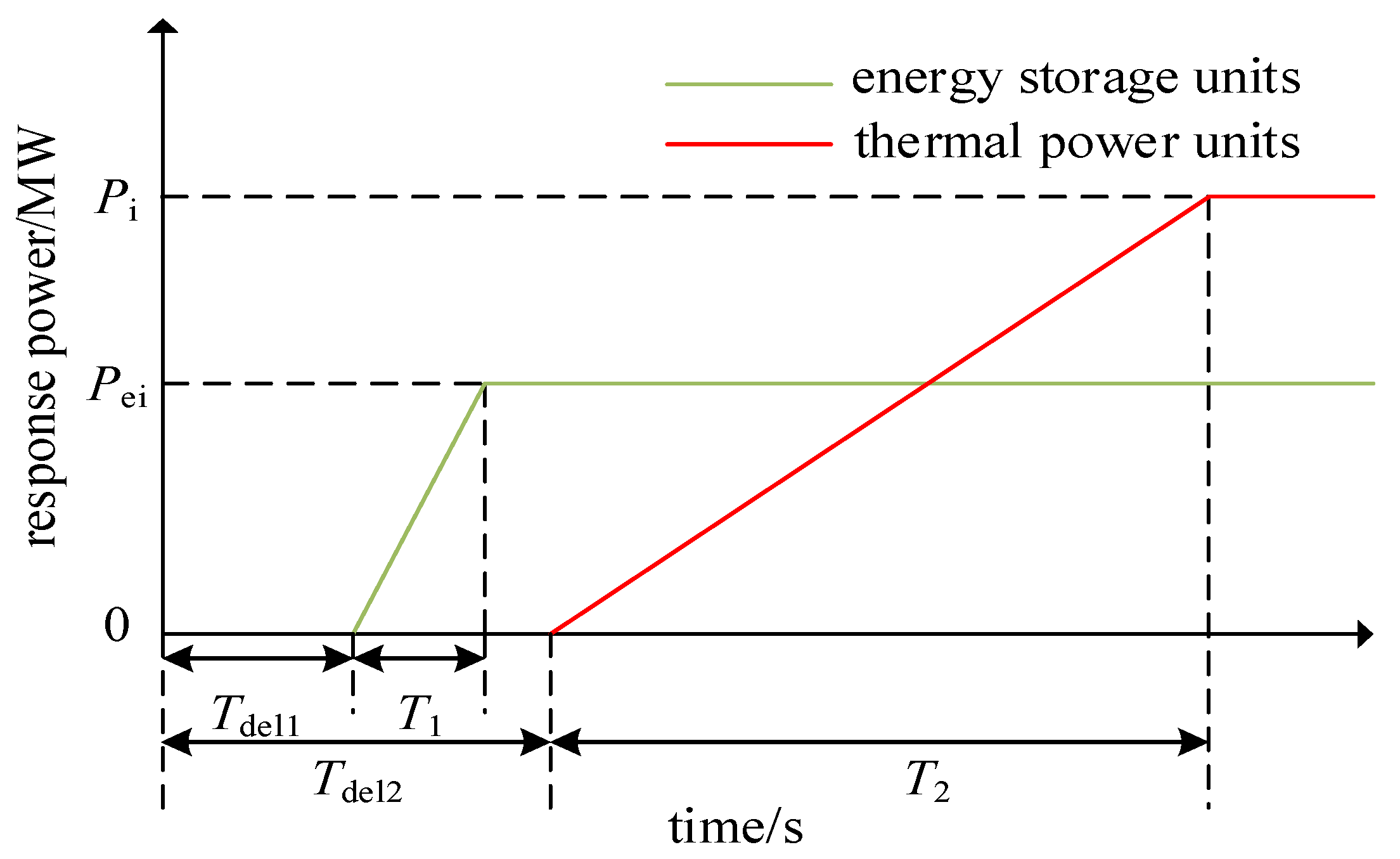
2.1.2. Comparison of Frequency Regulation Capability
2.1.3. Emergency Load Shedding Based on the Differential Evolution Algorithm
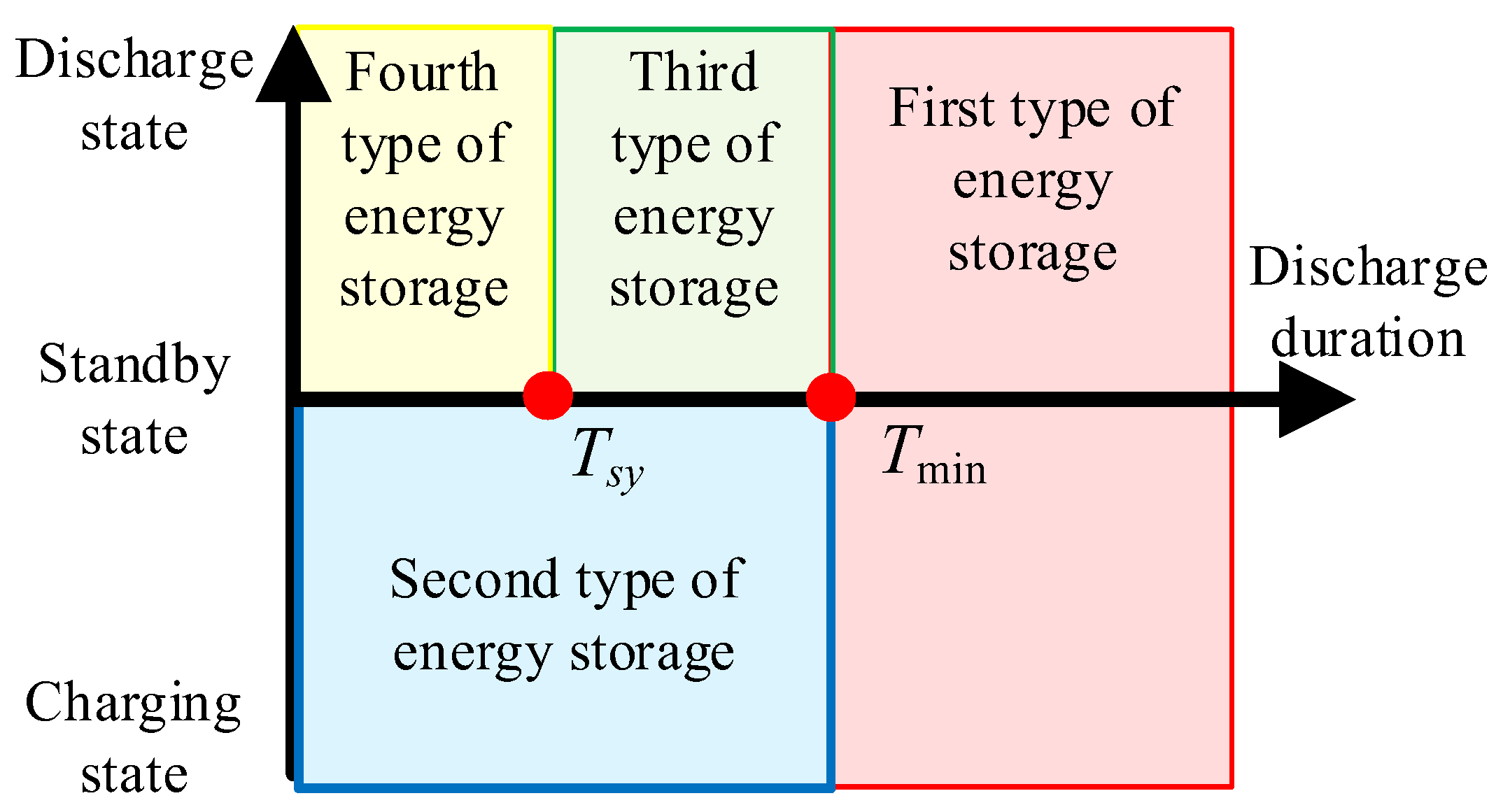
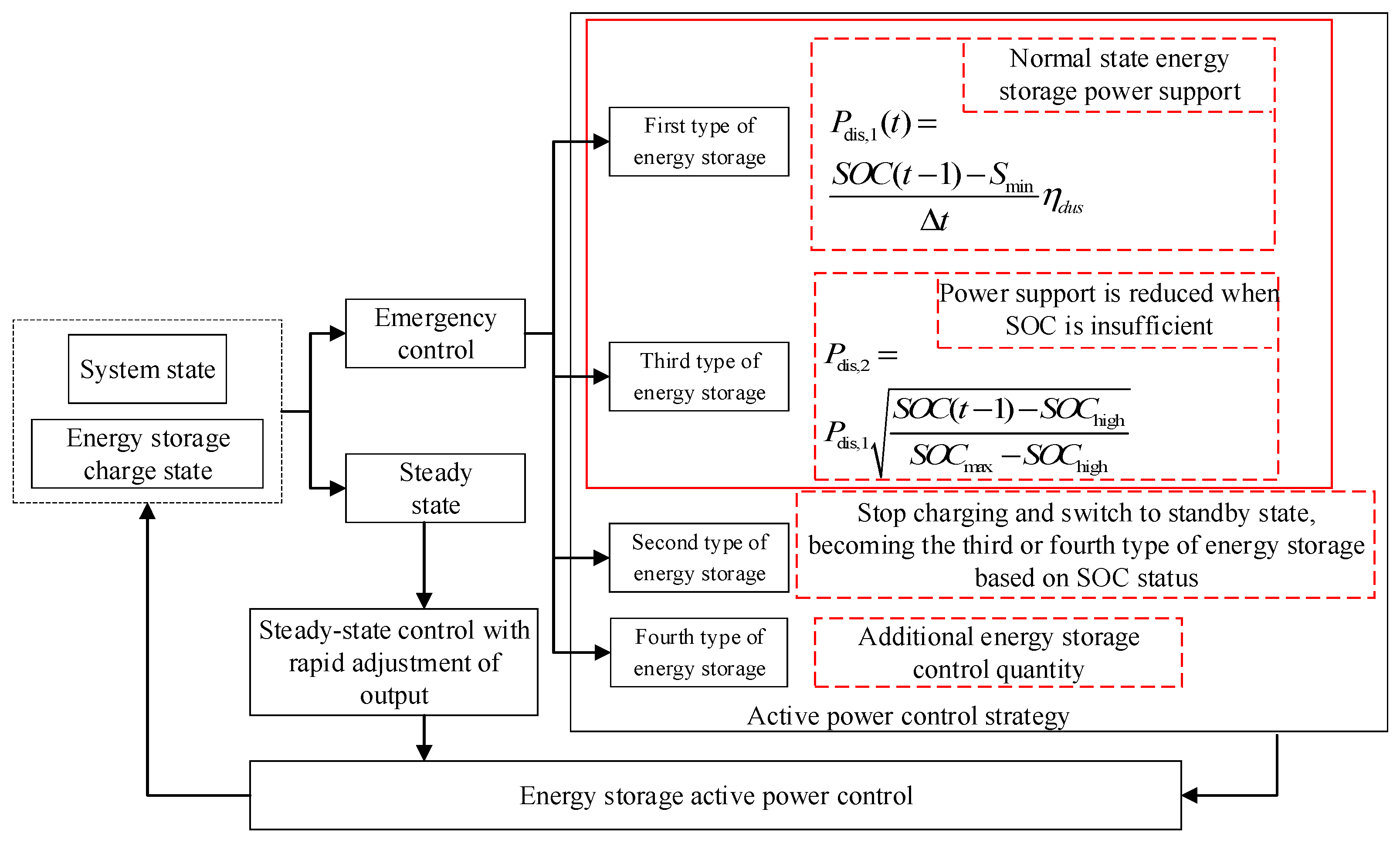
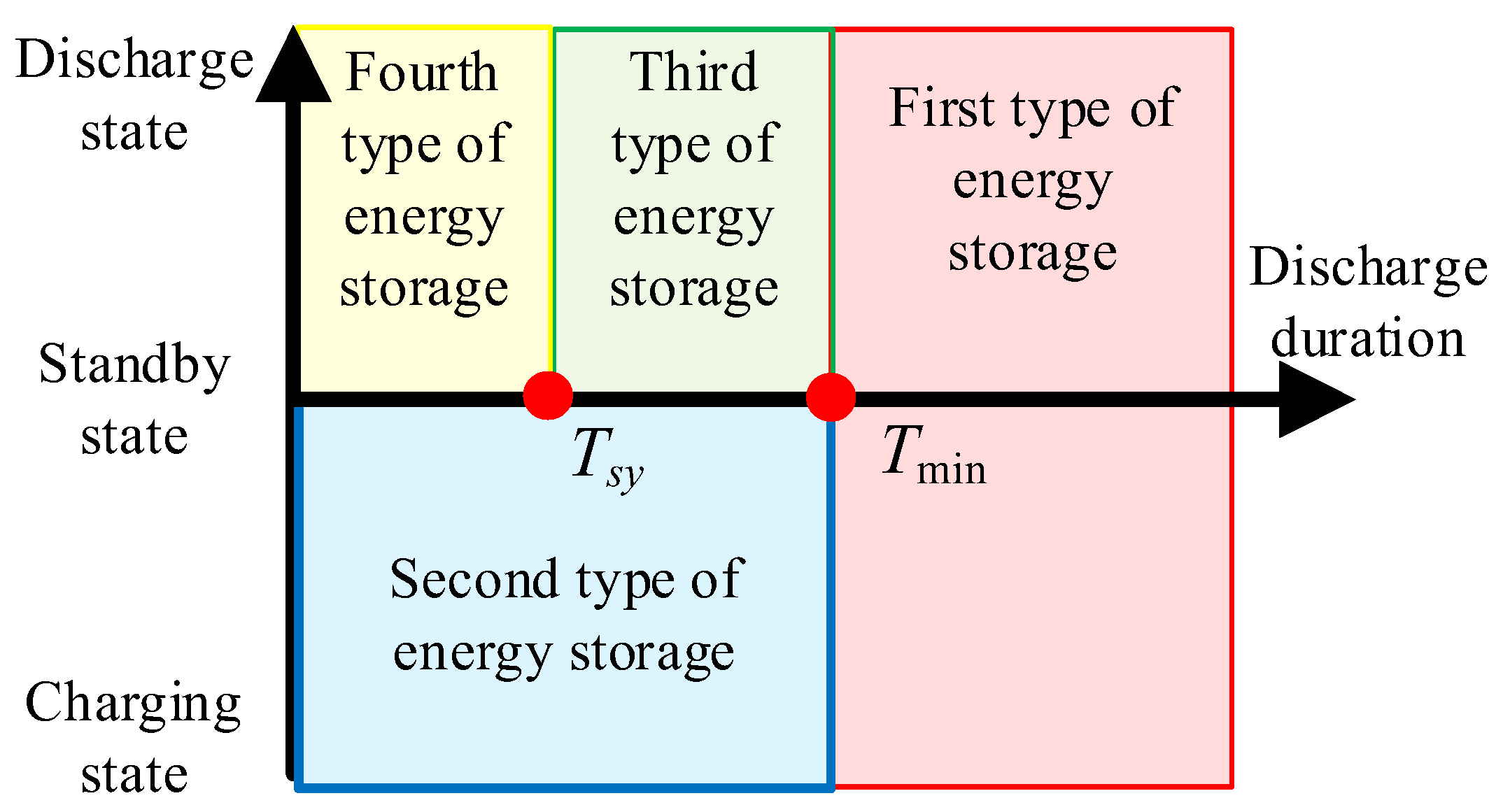
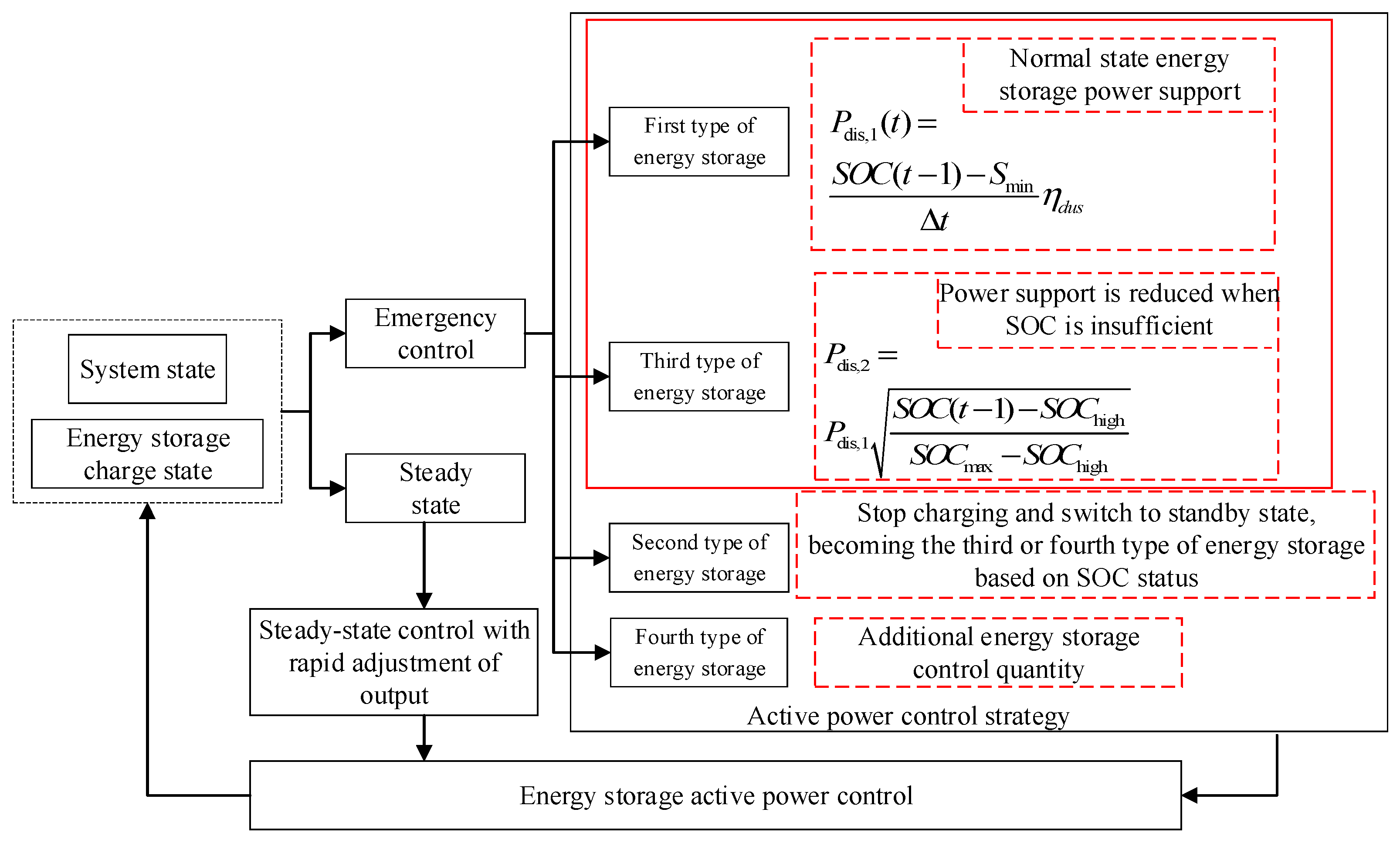
2.2. Considering Different Operating States of Energy Storage Control Strategies
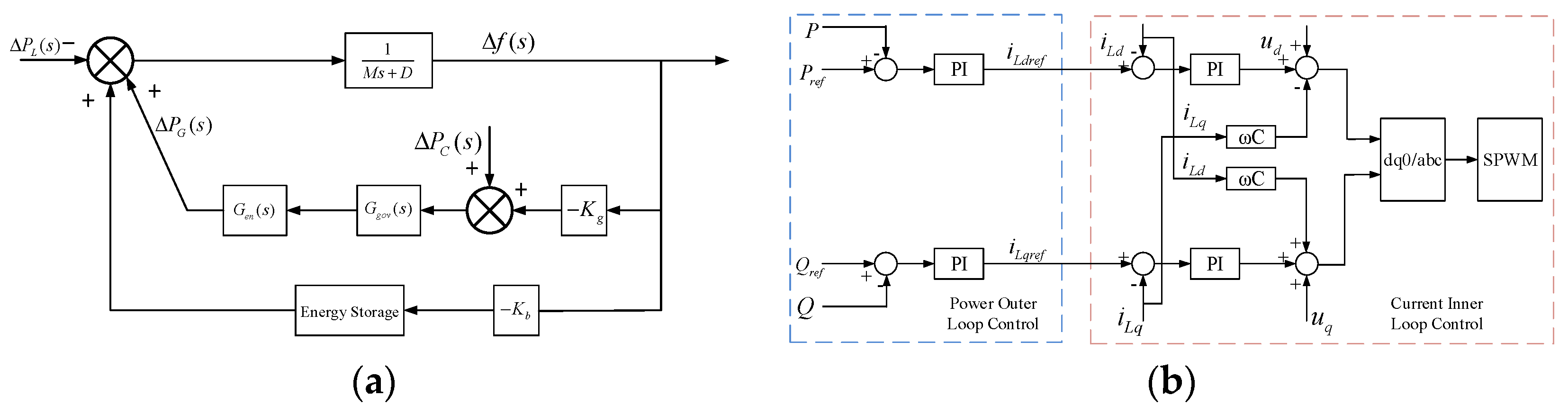
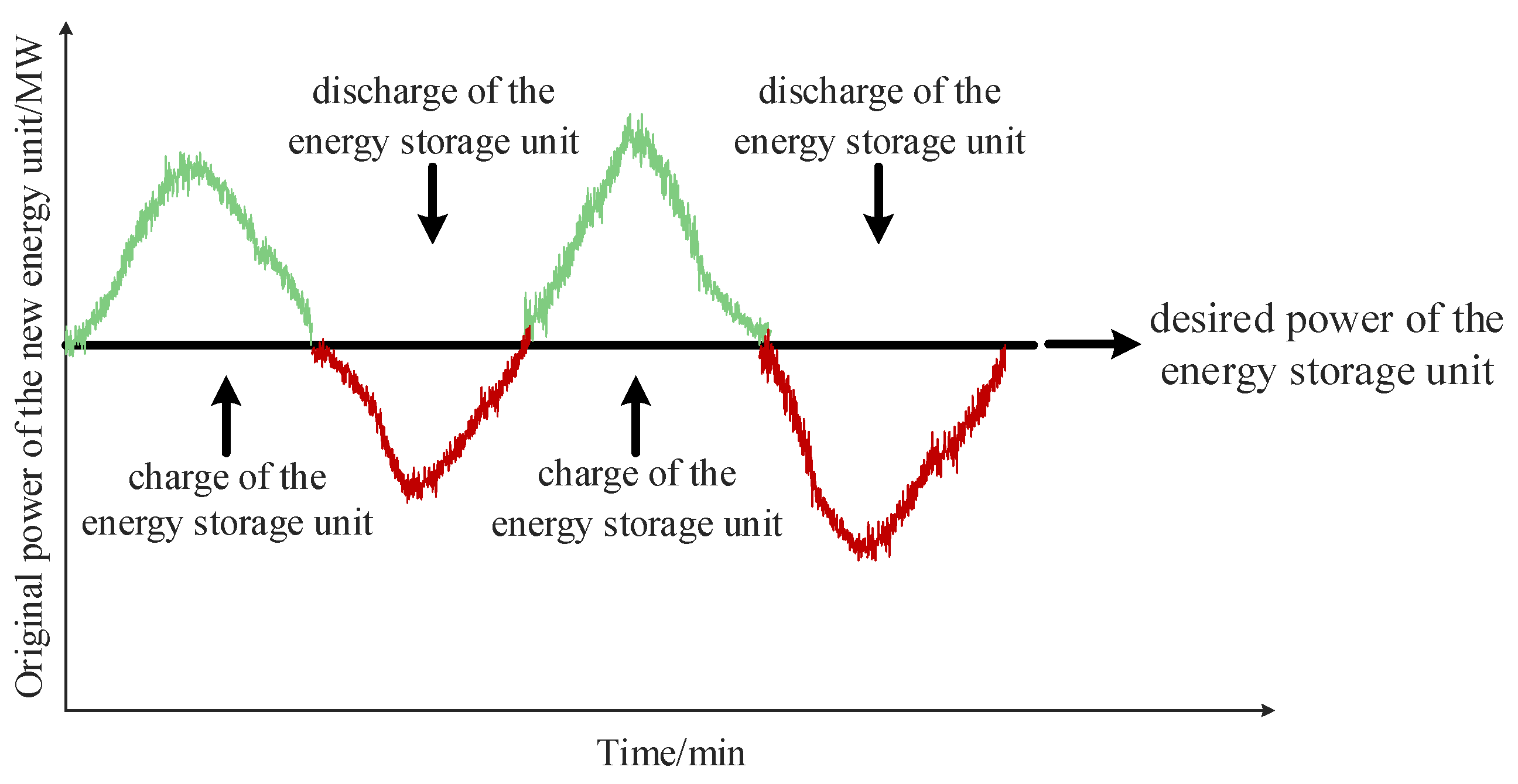
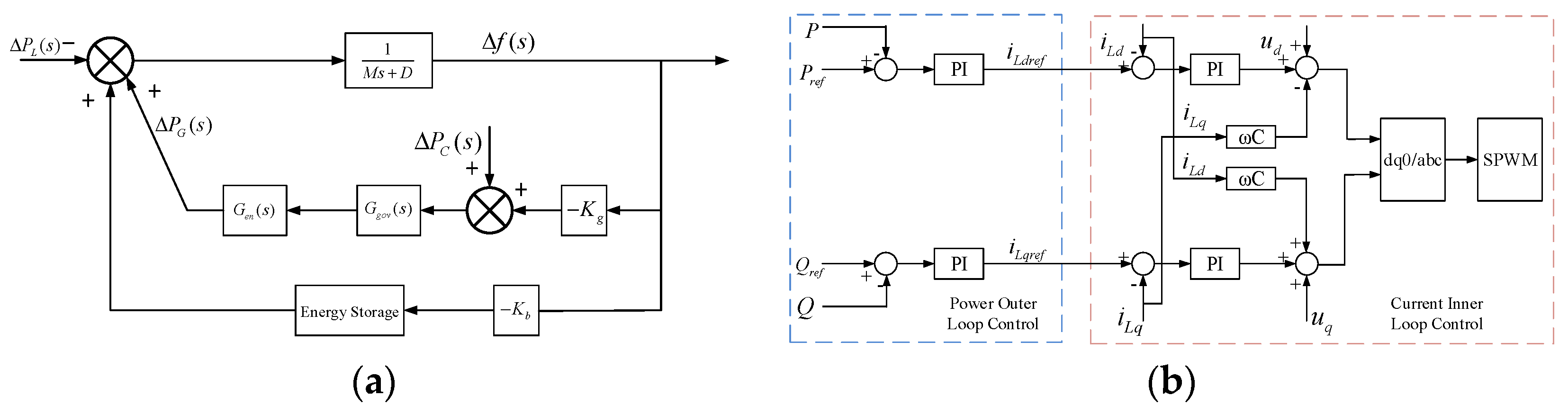
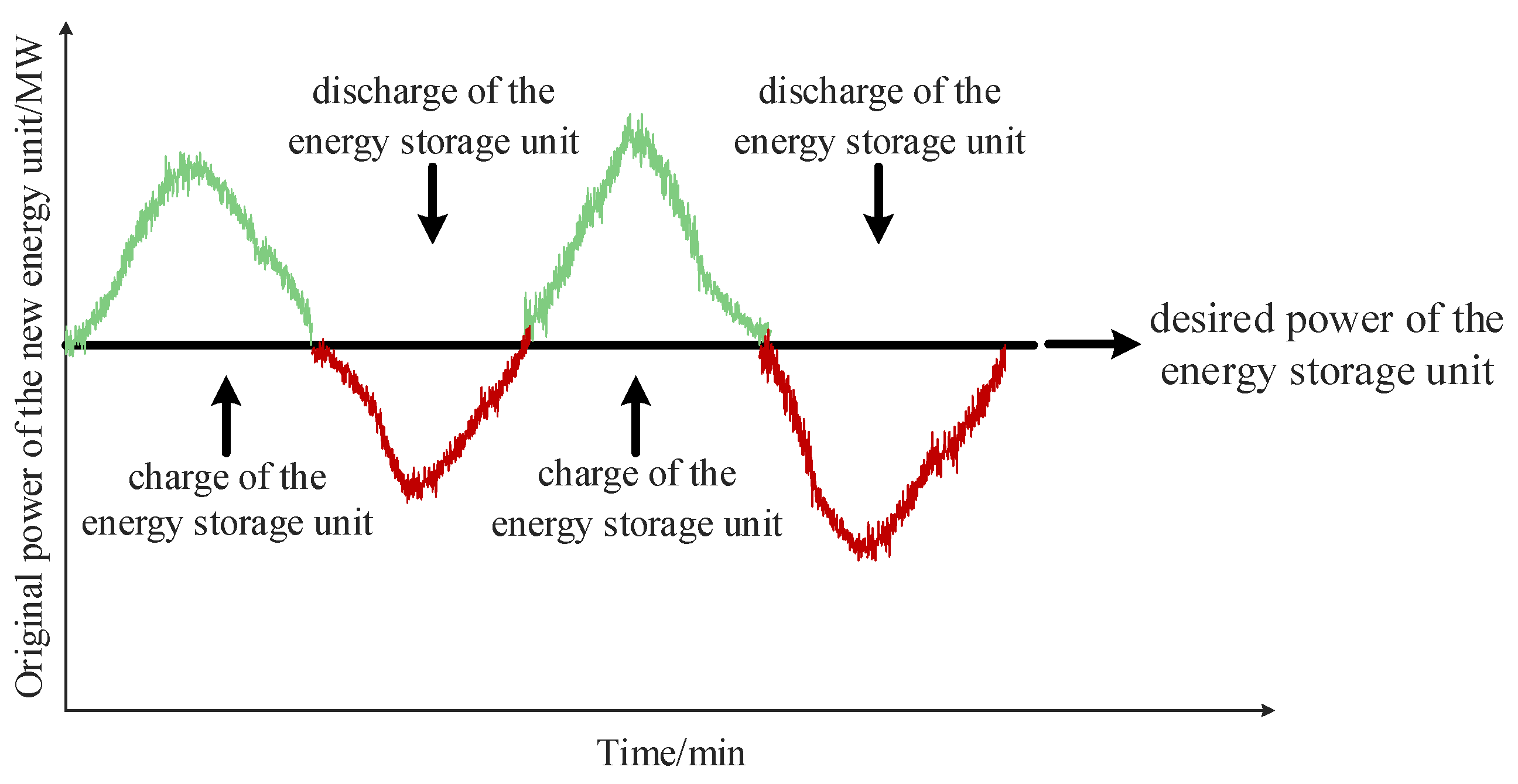
2.2.1. Energy Output Control Strategies
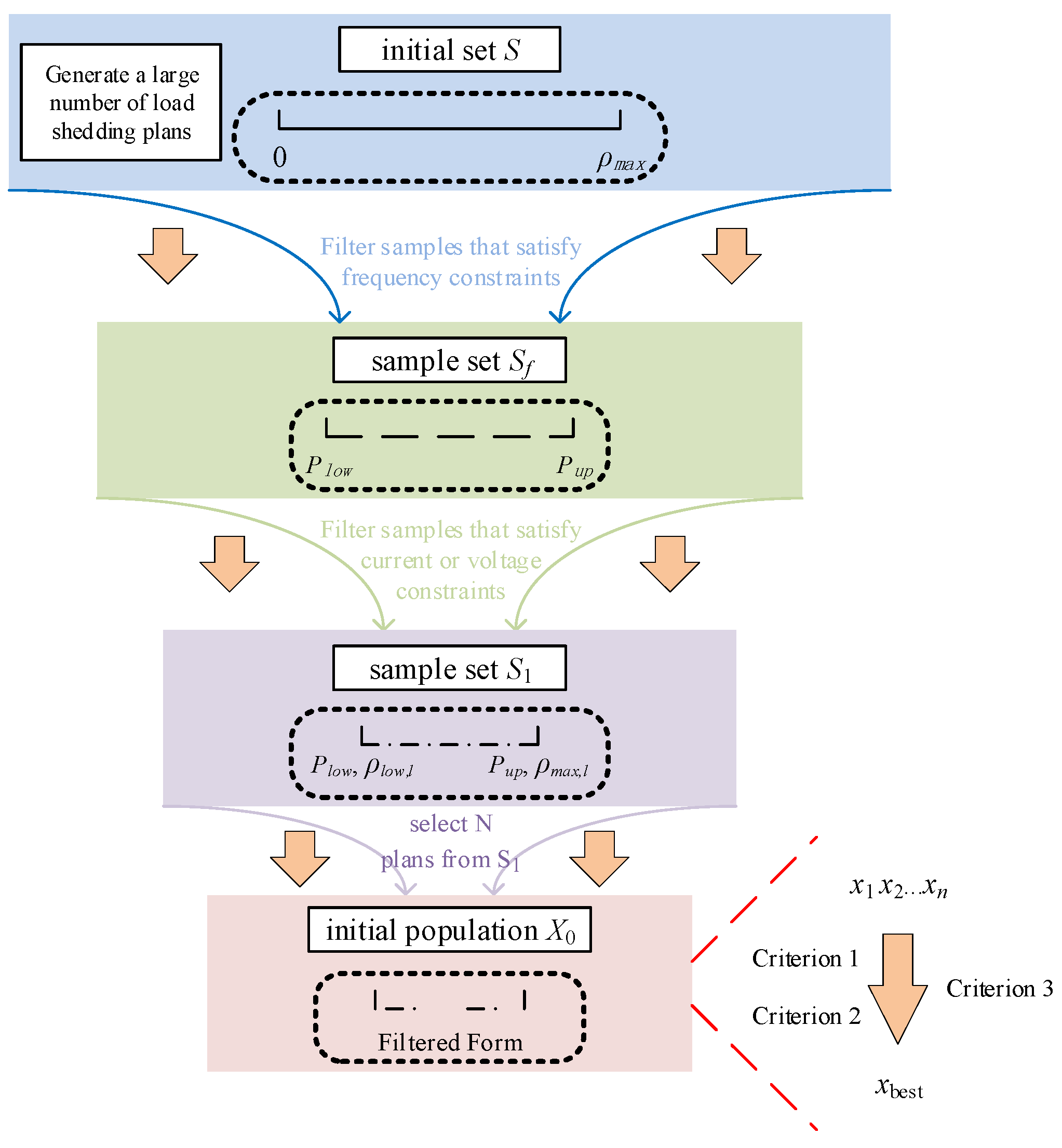
2.2.2. Adaptive Constraint Handling in Under-Frequency Load Shedding Optimization Strategy
- (1)
- Generate a large number of load-shedding plans randomly within the [0, ρmax] space, serving as the initial set S.
- (2)
- Filter samples that satisfy frequency constraints. Utilize a uniform removal approach to explore and determine approximate lower (Plow) and upper (Pup) limits of load-shedding amounts. Choose plans in S that meet Plow < Pup to compose the sample set Sf.
- (3)
- Filter samples that satisfy current or voltage constraints. Calculate the sensitivity of all load-shedding stations and identify the station Ls with the maximum sensitivity. Explore and determine its approximate lower limit with the maximum sensitivity. Explore and determine its approximate lower limit (Plow,L). Choose plans in the sample set Sf that meet the requirements to form the sample set S1.
- (4)
- Randomly select N plans from S1 to form the initial population X0.
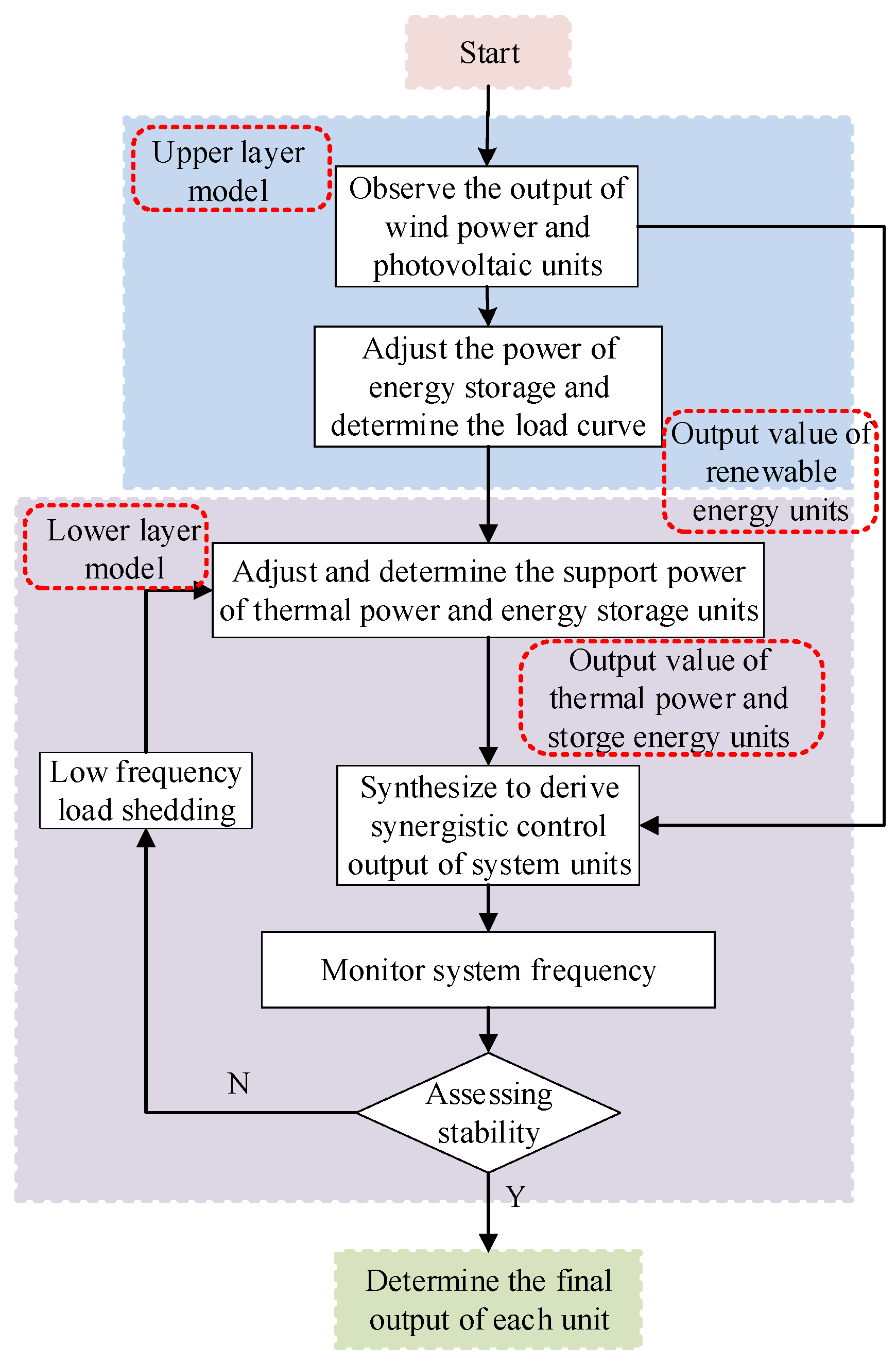
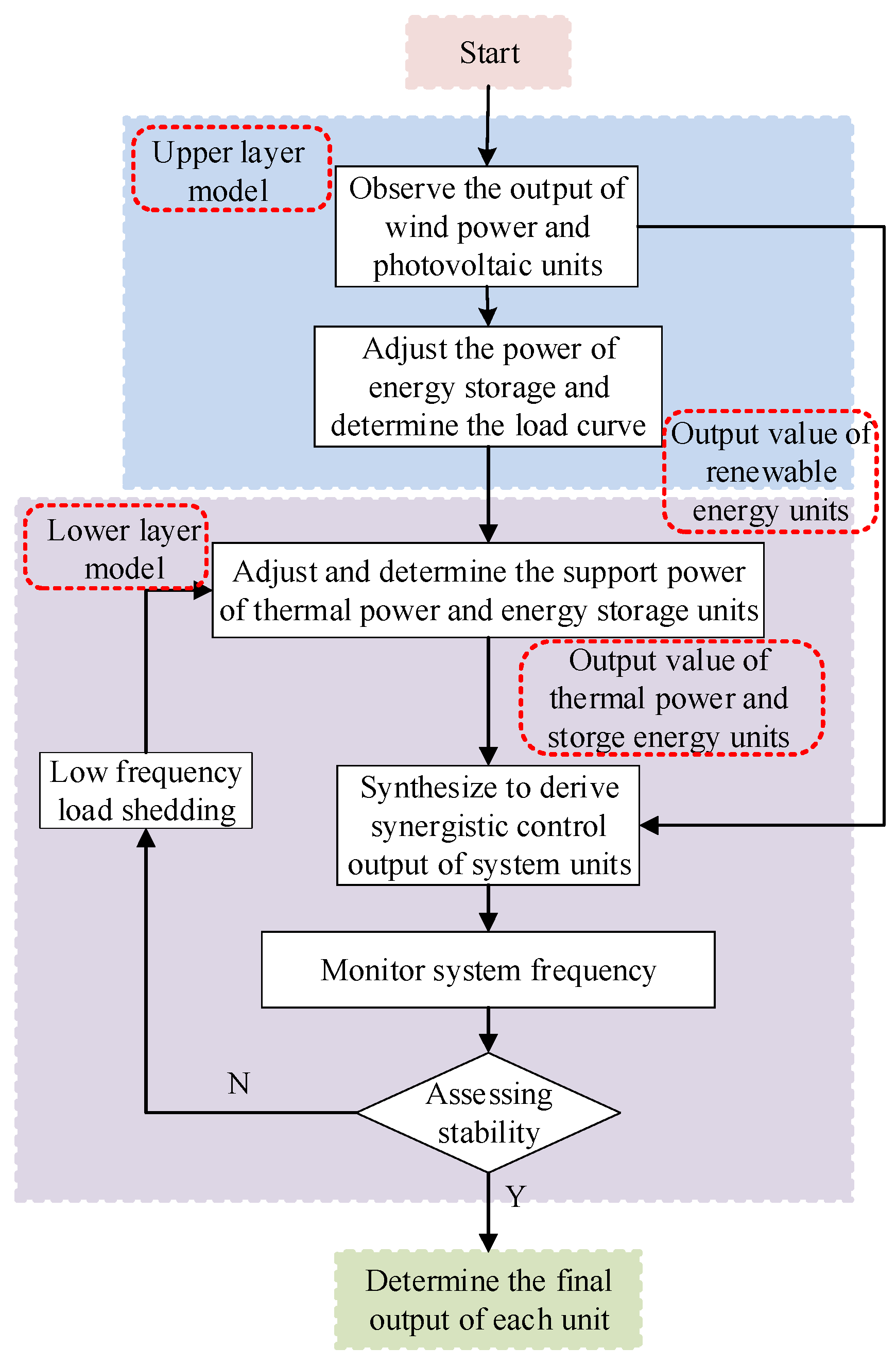
2.3. Hierarchical Coordinated Control Method for Systems with a High Proportion of Renewable Energy Sources
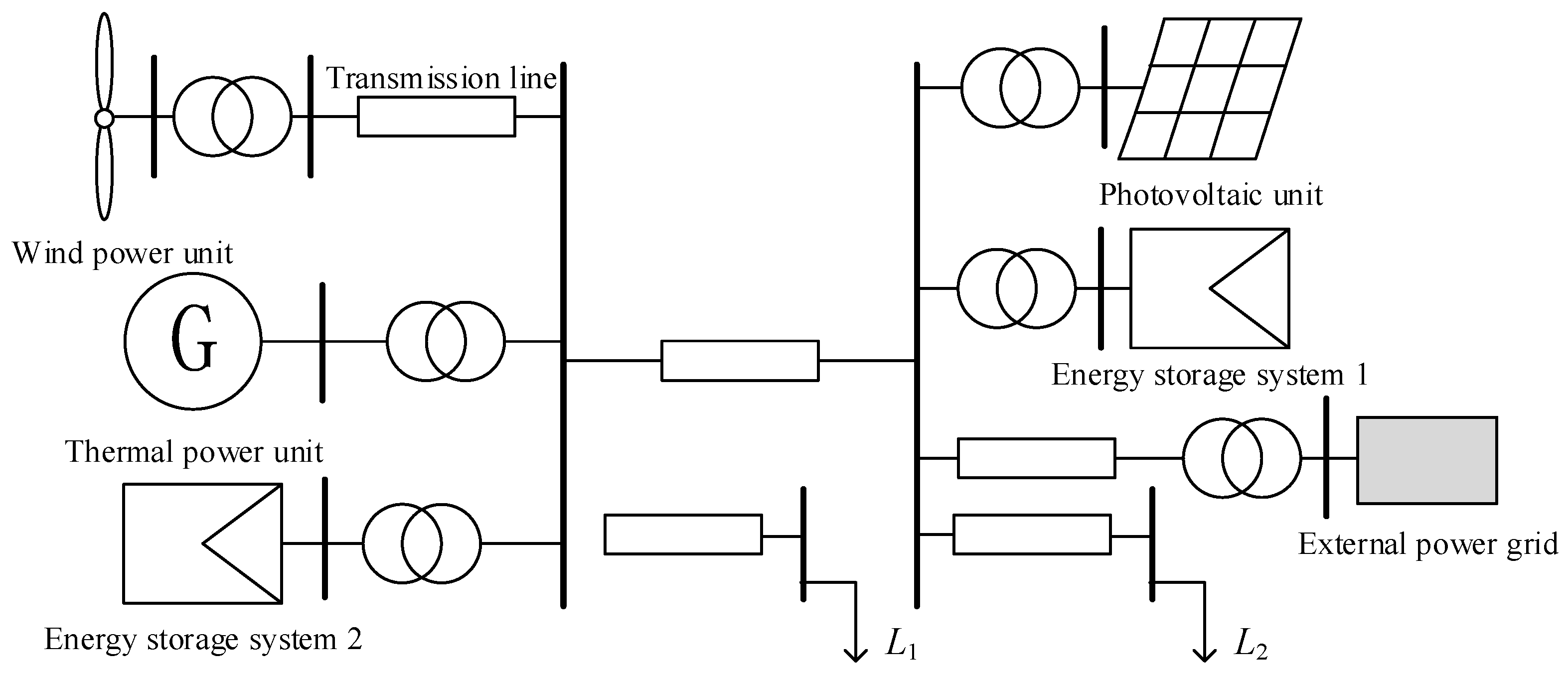
3. Case Studies
3.1. Introduction to the Algorithm
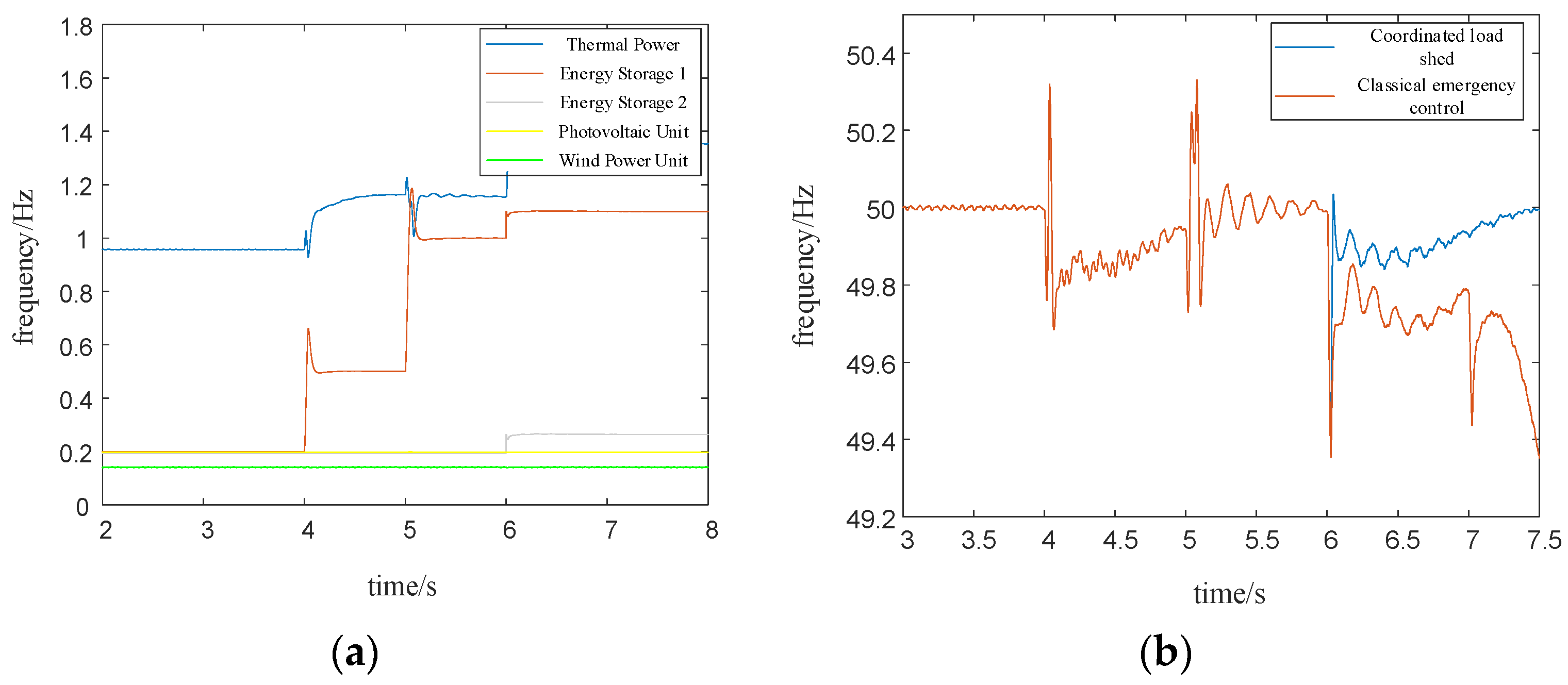
3.2. Analysis of Different Scenarios
4. Discussion
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| SOC | State of charge |
| AGC | Automatic generation control |
| ES | Energy storage |
| BESS | Battery energy storage system |
| PV | Photovoltaic system |
| DE | Differential evolution |
| DC | Direct current |
| Tmin | Shortest discharge time |
| Tsy | Remaining discharge time |
References
- Wu, M.; Ma, D.; Xiong, K.; Yuan, L. Deep Reinforcement Learning for Load Frequency Control in Isolated Microgrids: A Knowledge Aggregation Approach with Emphasis on Power Symmetry and Balance. Symmetry 2024, 16, 322. [Google Scholar] [CrossRef]
- Cao, Y.; Zhang, H.; Shi, X.; Xu, Q.W.; Li, C.G.; Li, W. Preliminary Study on Participation Mechanism of Large-scale Distributed Energy Resource in Security and Stability Control of Large Power Grid. Autom. Electr. Power Syst. 2021, 18, 1–8. [Google Scholar]
- Wu, D.; Wu, L.; Wen, T.; Li, L. Microgrid Operation Optimization Method Considering Power-to-Gas Equipment: An Improved Gazelle Optimization Algorithm. Symmetry 2024, 1, 83. [Google Scholar] [CrossRef]
- Cao, Y.; Wu, Q.; Zhang, H.; Li, C. Optimal Sizing of Hybrid Energy Storage System Considering Power Smoothing and Transient Frequency Regulation. Int. J. Electr. Power Energy Syst. 2022, 142, 108227. [Google Scholar] [CrossRef]
- Li, Q.; Wang, D.; Liang, X.; Qin, Y.; Zhang, Y.; Ma, C. An Iteratively-Nested Modeling Method for Stability Analysis of the Multirate Power System. IEEE Trans. Ind. Inform. 2024, 3, 3070–3081. [Google Scholar] [CrossRef]
- Zhou, Y.; Zhao, J.; Wu, Z. A Review of Symmetry-Based Open-Circuit Fault Diagnostic Methods for Power Converters. Symmetry 2024, 2, 204. [Google Scholar] [CrossRef]
- Cao, Y.; Wu, Q.; Zhang, H.; Li, C. Multi-Objective Optimal Siting and Sizing of BESS Considering Transient Frequency Deviation and Post-Disturbance Line Overload. Int. J. Electr. Power Energy Syst. 2023, 144, 108575. [Google Scholar] [CrossRef]
- Li, B.; Sun, Y.; Li, Y.; Lu, T.; Yu, T.; Pang, Y. Research on coordinated control of AC/DC system considering energy storage power limitation. Energy Rep. 2022, 8, 1168–1175. [Google Scholar] [CrossRef]
- Nimalsiri, N.; Ratnam, E.; Smith, D.; Mediwaththe, C.; Halgamuge, S. A Distributed Coordination Approach for the Charge and Discharge of Electric Vehicles in Unbalanced Distribution Grids. IEEE Trans. Ind. Inform. 2024, 3, 3551–3562. [Google Scholar] [CrossRef]
- Alpízar-Castillo, J.; Ramirez-Elizondo, L.; Bauer, P. Assessing the Role of Energy Storage in Multiple Energy Carriers toward Providing Ancillary Services: A Review. Energies 2023, 1, 379. [Google Scholar] [CrossRef]
- Tushar, M.; Zeineddine, A.; Assi, C. Demand-Side Management by Regulating Charging and Discharging of the EV, ESS, and Utilizing Renewable Energy. IEEE Trans. Ind. Inform. 2018, 1, 117–126. [Google Scholar] [CrossRef]
- Petrollese, M.; Cascetta, M.; Tola, V.; Cocco, D.; Cau, G. Pumped thermal energy storage systems integrated with a concentrating solar power section: Conceptual design and performance evaluation. Energy 2022, 247, 123516. [Google Scholar] [CrossRef]
- Hunt, J.D.; Nascimento, A.; Zakeri, B.; Jurasz, J.; Dąbek, P.B.; Barbosa, P.S.F.; Brandão, R.; de Castro, N.J.; Filho, W.L.; Riahi, K. Lift Energy Storage Technology: A solution for decentralized urban energy storage. Energy 2022, 254, 124102. [Google Scholar] [CrossRef]
- Rekioua, D. Energy Storage Systems for Photovoltaic and Wind Systems: A Review. Energies 2023, 9, 3893. [Google Scholar] [CrossRef]
- Zhang, H.; Li, Y.; Gao, D.W.; Zhou, J. Distributed Optimal Energy Management for Energy Internet. IEEE Trans. Ind. Inform. 2017, 6, 3081–3097. [Google Scholar] [CrossRef]
- Dowling, J.-A.; Lewis, N.-S. Long-duration energy storage for reliable renewable electricity: The realistic possibilities. Bull. At. Sci. 2021, 6, 281–284. [Google Scholar] [CrossRef]
- Sarker, M.R.; Saad, M.H.M.; Riaz, A.; Lipu, M.S.H.; Olazagoitia, J.L. Micro Energy Storage Systems in Energy Harvesting Applications: Analytical Evaluation towards Future Research Improvement. Micromachines 2022, 4, 512. [Google Scholar] [CrossRef] [PubMed]
- Zhao, J.; Wen, F.; Dong, Z.Y.; Xue, Y.; Wong, K.P. Optimal Dispatch of Electric Vehicles and Wind Power Using Enhanced Particle Swarm Optimization. IEEE Trans. Ind. Inform. 2012, 8, 889–899. [Google Scholar] [CrossRef]
- Lin, H.; Liang, T.; Chen, S.M. Estimation of Battery State of Health Using Probabilistic Neural Network. IEEE Trans. Ind. Inform. 2013, 2, 679–685. [Google Scholar] [CrossRef]
- Cao, Y.; Wu, Q.; Zhang, H.; Li, C.; Zhang, X. Chance-Constrained Optimal Configuration of BESS Considering Uncertain Power Fluctuation and Frequency Deviation Under Contingency. IEEE Trans. Sustain. Energy 2022, 13, 2291–2303. [Google Scholar] [CrossRef]
- Khan, M.-I.; Asfand, F.; Al-Ghamdi, S.-G. Progress in research and technological advancements of thermal energy storage systems for concentrated solar power. J. Energy Storage 2022, 55, 105860. [Google Scholar] [CrossRef]
- Majidi, M.; Parvania, M.; Byrne, R. Risk-based stochastic scheduling of centralised and distributed energy storage systems. IET Smart Grid 2023, 6, 596–608. [Google Scholar] [CrossRef]
- Adewumi, O.B.; Fotis, G.; Vita, V.; Nankoo, D.; Ekonomou, L. The Impact of Distributed Energy Storage on Distribution and Transmission Networks’ Power Quality. Appl. Sci. 2022, 13, 6466. [Google Scholar] [CrossRef]
- Serra, F.; Lucariello, M.; Petrollese, M.; Cau, G. Optimal Integration of Hydrogen-Based Energy Storage Systems in Photovoltaic Microgrids: A Techno-Economic Assessment. Energies 2020, 16, 4149. [Google Scholar] [CrossRef]
- Kubankova, E.-A.; Arkharov, I.-A. A Review of Energy Storage Systems. Chem. Pet. Eng. 2023, 11, 936–942. [Google Scholar] [CrossRef]
- Trahey, L.; Brushett, F.R.; Balsara, N.P.; Ceder, G.; Cheng, L.; Chiang, Y.-M.; Hahn, N.T.; Ingram, B.J.; Minteer, S.D.; Moore, J.S.; et al. Energy storage emerging: A perspective from the Joint Center for Energy Storage Research. Proc. Natl. Acad. Sci. USA 2020, 23, 12550–12557. [Google Scholar] [CrossRef] [PubMed]
- Liu, T.; Yang, Z.; Duan, Y. Short- and long-duration cooperative energy storage system: Optimizing sizing and comparing rule-based strategies. Energy 2023, 281, 128273. [Google Scholar] [CrossRef]
- Luerssen, C.; Verbois, H.; Gandhi, O.; Reindl, T.; Sekhar, C.; Cheong, D. Global sensitivity and uncertainty analysis of the levelised cost of storage (LCOS) for solar-PV-powered cooling. Appl. Energy 2021, 286, 116533. [Google Scholar] [CrossRef]
- Dai, R.; Esmaeilbeigi, R.; Charkhgard, H. The Utilization of Shared Energy Storage in Energy Systems: A Comprehensive Review. IEEE Trans. Smart Grid 2021, 4, 3163–3174. [Google Scholar] [CrossRef]
- Gabbar, H.-A.; Othman, A.-M.; Abdussami, M.R. Review of Battery Management Systems (BMS) Development and Industrial Standards. Technologies 2021, 2, 28. [Google Scholar] [CrossRef]
- Lai, C.-S.; Locatelli, G. Economic and financial appraisal of novel large-scale energy storage technologies. Energy 2021, 214, 118954. [Google Scholar] [CrossRef]
- Kandari, R.; Neeraj, N.; Micallef, A. Review on Recent Strategies for Integrating Energy Storage Systems in Microgrids. Energies 2023, 1, 317. [Google Scholar] [CrossRef]
- Lin, Y.; Lin, W.; Wu, W.; Zhu, Z. Optimal Scheduling of Power Systems with High Proportions of Renewable Energy Accounting for Operational Flexibility. Energies 2023, 14, 5537. [Google Scholar] [CrossRef]
- Ai, C.; Zhang, L.; Gao, W.; Yang, G.; Wu, D.; Chen, L.; Chen, W.; Plummer, A. A review of energy storage technologies in hydraulic wind turbines. Energy Convers. Manag. 2022, 264, 115584. [Google Scholar] [CrossRef]
- Bakirci, K.; Yuksel, B. Simulation study of solar-source heat pump system with sensible energy storage. J. Therm. Anal. Calorim. 2021, 4, 1853–1864. [Google Scholar] [CrossRef]
- Guo, J.; Chen, T.; Chaudhuri, B.; Hui, S.Y.R. Stability of Isolated Microgrids with Renewable Generation and Smart Loads. IEEE Trans. Sustain. Energy 2020, 11, 2845–2854. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Aspect | Synchronous Machine Inertia | Energy Storage Virtual Inertia |
|---|---|---|
| Inertia Continuity | Fixed and discrete | Continuous and designable |
| Inertial Response Time | Instantaneous action | Some inherent delay |
| Source of Response Energy | Mechanical energy from synchronous machines | Electrical energy from energy storage |
| Aspect | Synchronous Machine Frequency Regulation | Energy Storage Frequency Regulation |
|---|---|---|
| Response Delay | Not more than 3 s | Not more than 0.5 s |
| Complete Response Time | 10~20 s | Not more than 2 s |
| Output Power Coupling | Mechanical energy from synchronous machines should not exceed governor response limits | Theoretically full power range adjustment, generally with certain limits |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, J.; Wang, J.; Cao, Y.; Li, B.; Li, C. A Coordinated Control Strategy of Multi-Type Flexible Resources and Under-Frequency Load Shedding for Active Power Balance. Symmetry 2024, 16, 479. https://doi.org/10.3390/sym16040479
Zhang J, Wang J, Cao Y, Li B, Li C. A Coordinated Control Strategy of Multi-Type Flexible Resources and Under-Frequency Load Shedding for Active Power Balance. Symmetry. 2024; 16(4):479. https://doi.org/10.3390/sym16040479
Chicago/Turabian StyleZhang, Jian, Jiaying Wang, Yongji Cao, Baoliang Li, and Changgang Li. 2024. "A Coordinated Control Strategy of Multi-Type Flexible Resources and Under-Frequency Load Shedding for Active Power Balance" Symmetry 16, no. 4: 479. https://doi.org/10.3390/sym16040479
APA StyleZhang, J., Wang, J., Cao, Y., Li, B., & Li, C. (2024). A Coordinated Control Strategy of Multi-Type Flexible Resources and Under-Frequency Load Shedding for Active Power Balance. Symmetry, 16(4), 479. https://doi.org/10.3390/sym16040479