
Research on the Characteristics of Jacks Used to Rectify Tilted Buildings



Abstract
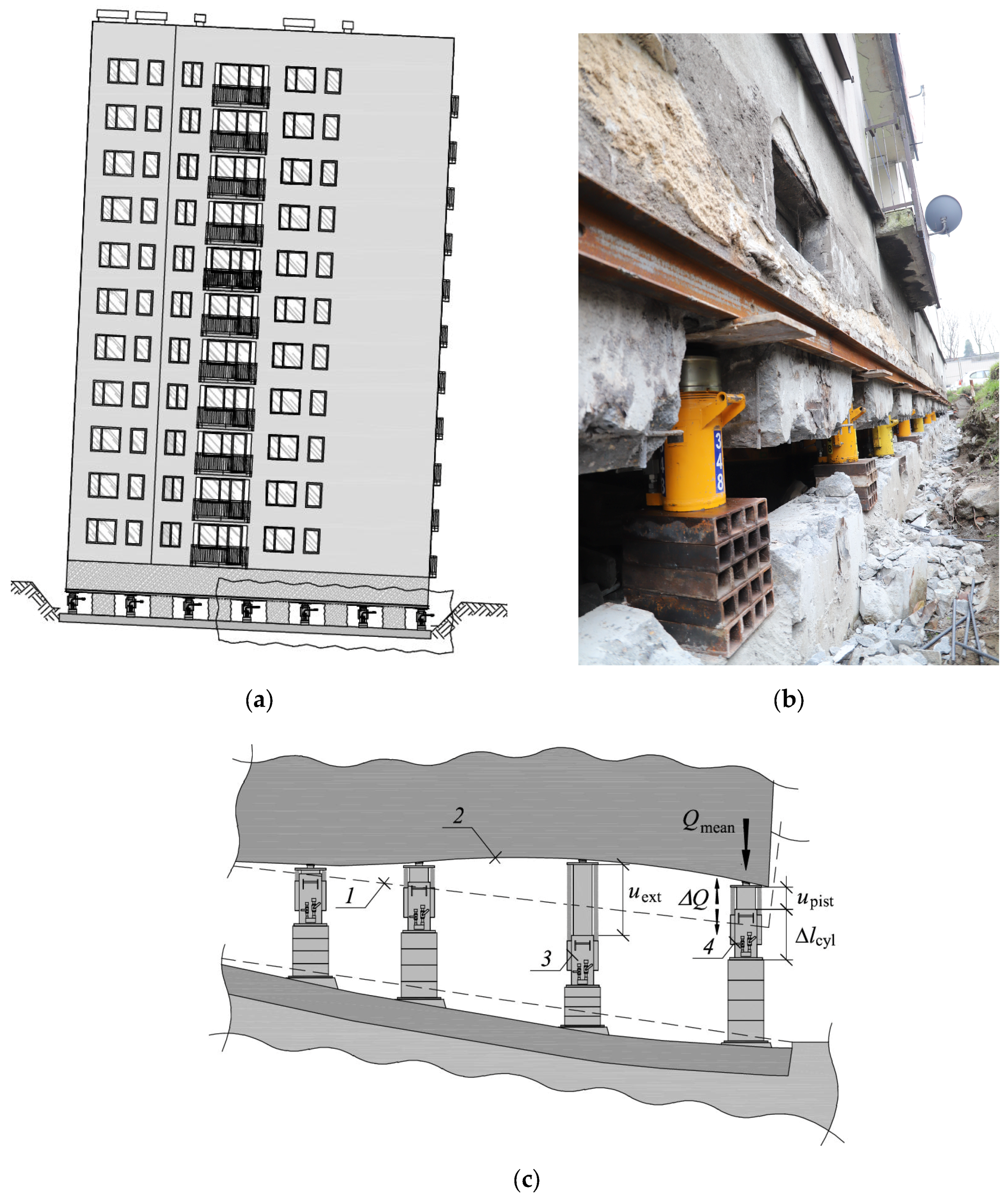
1. Introduction
2. Materials and Methods
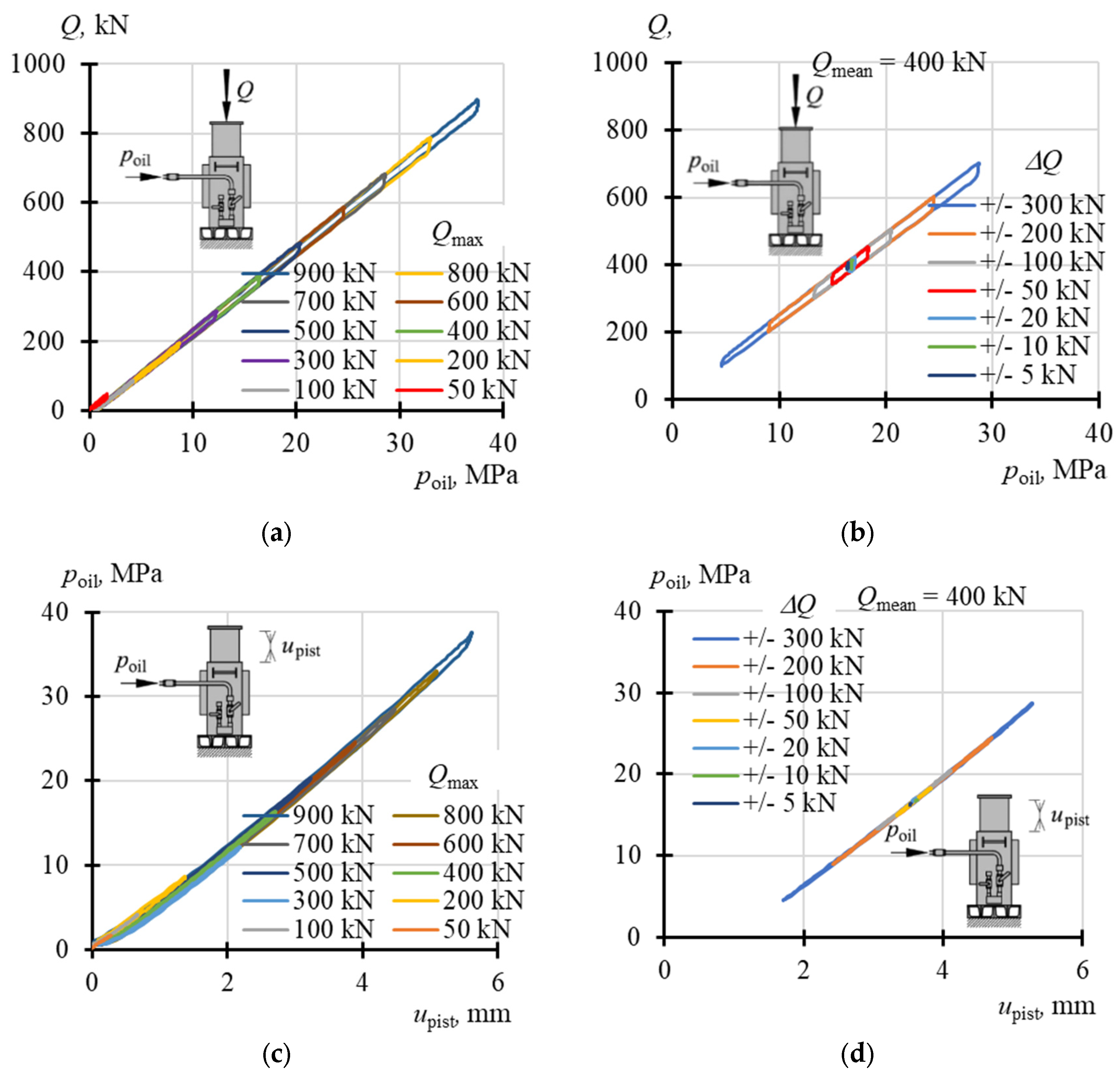
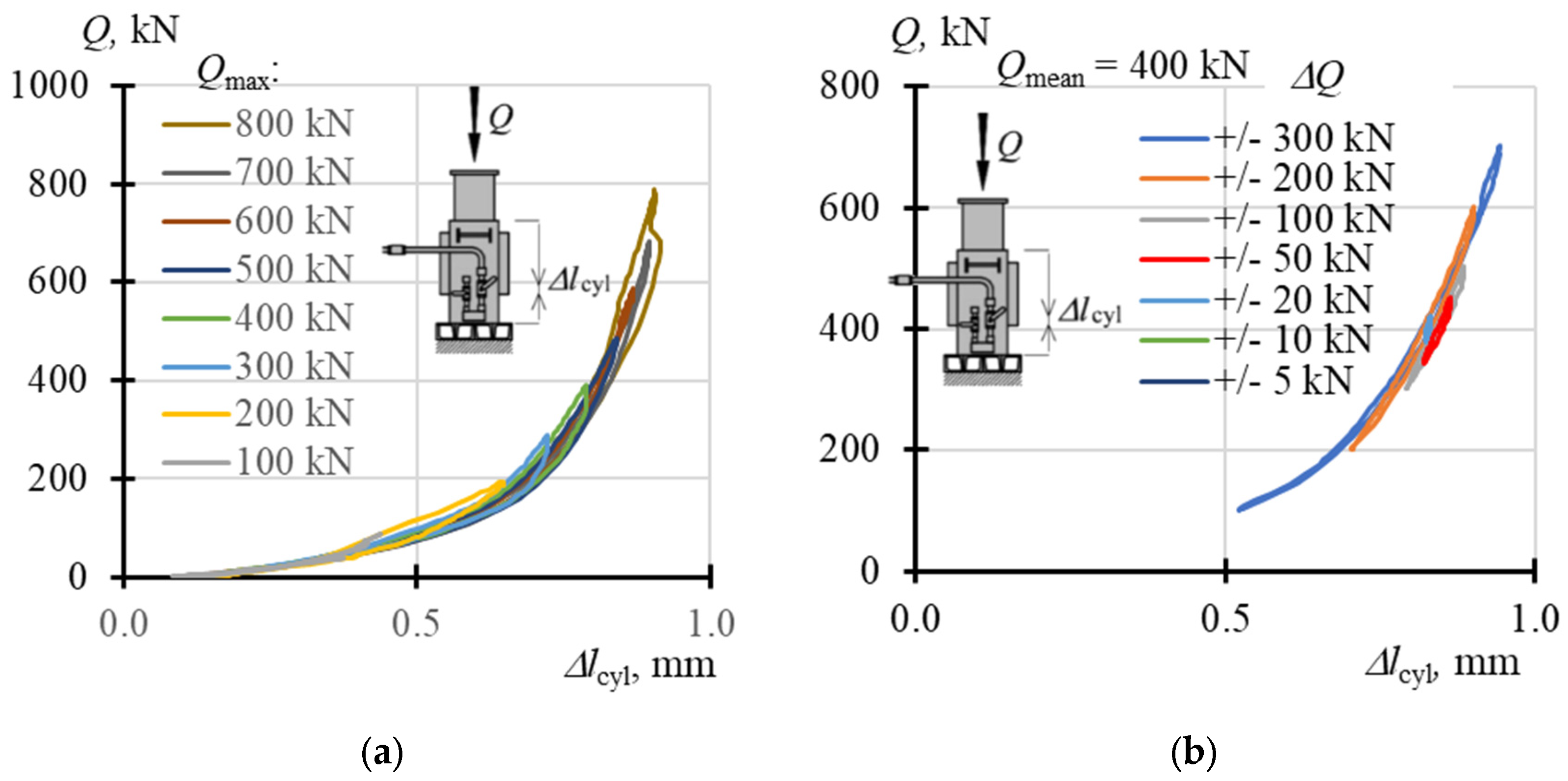
3. Results
4. Discussion
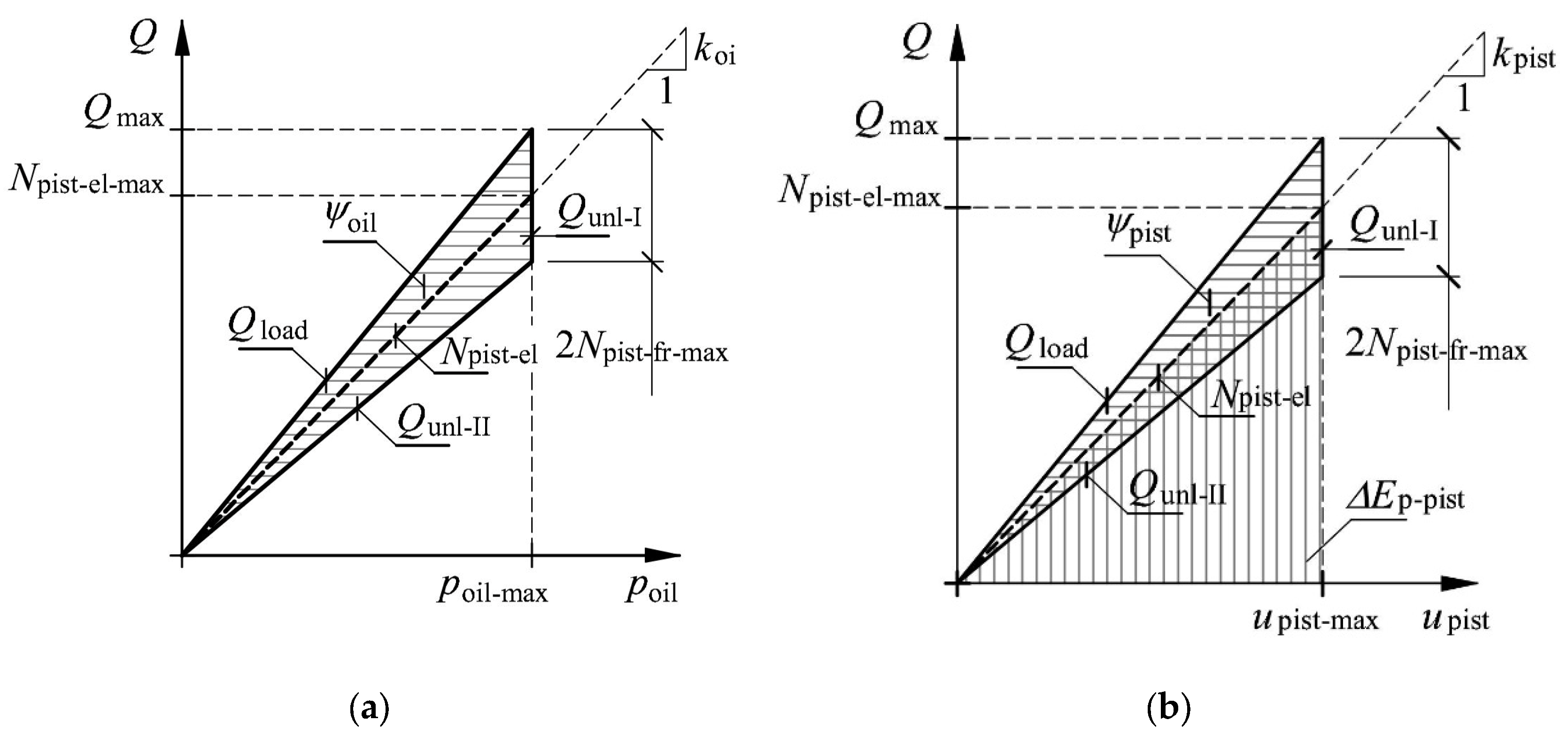
4.1. Model of the Jack
4.2. Estimating the Characteristic Values of the Jack Model
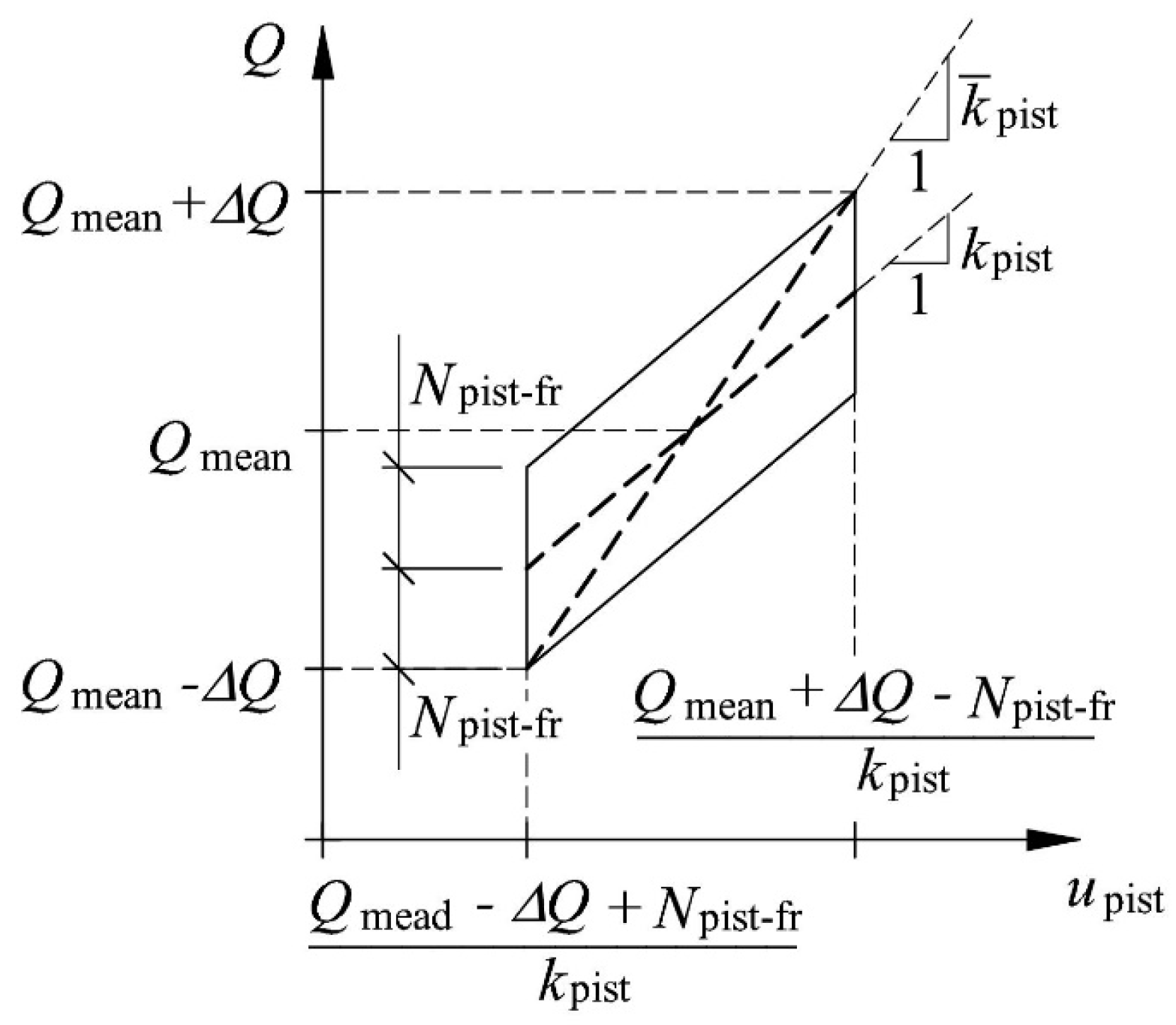
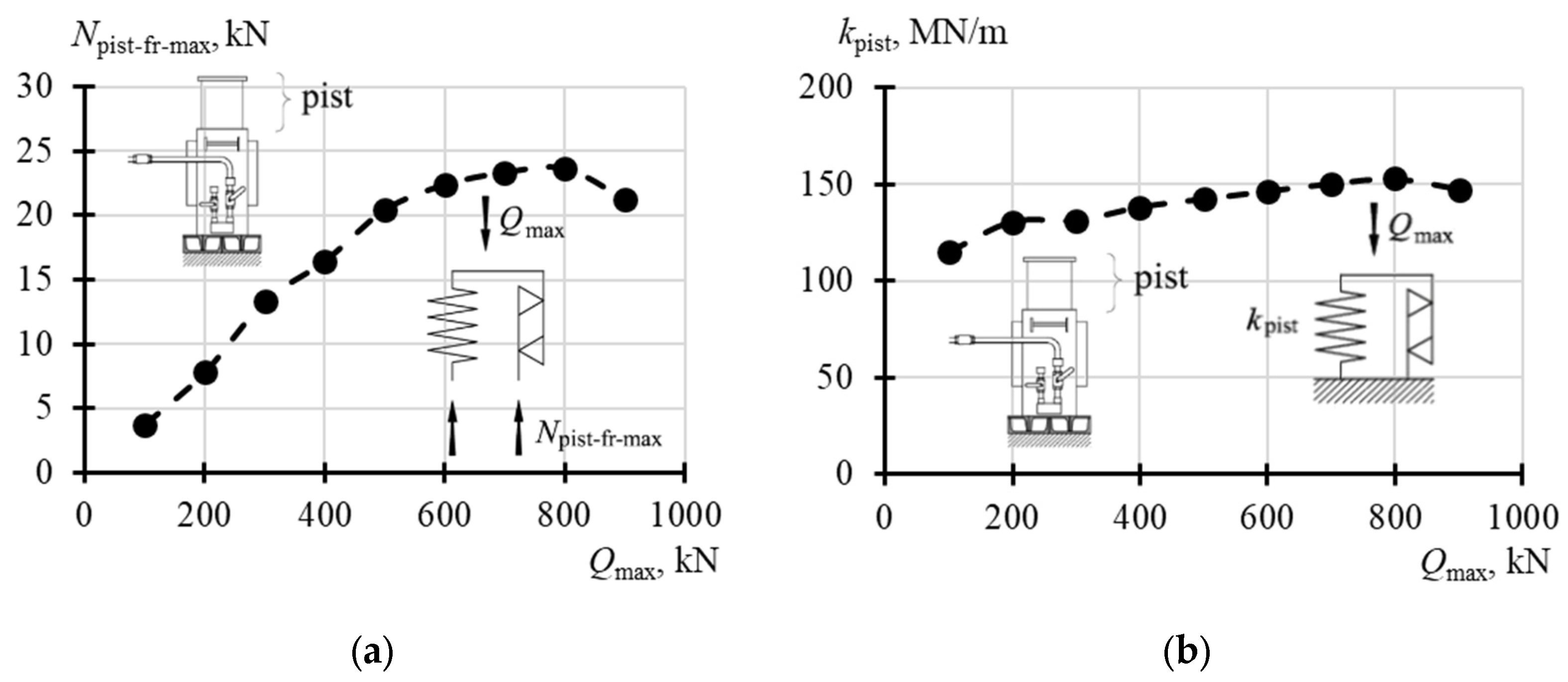
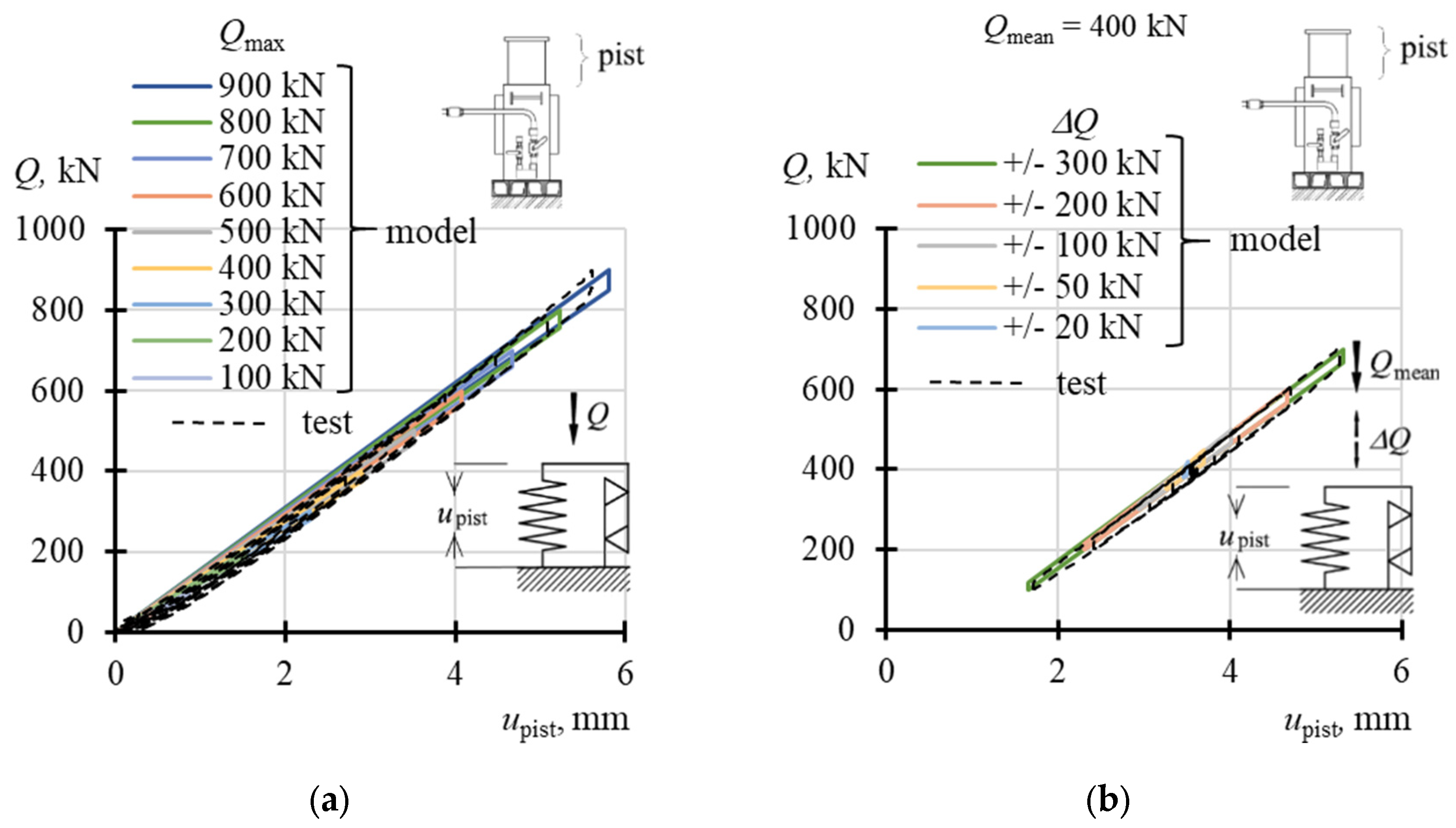
4.2.1. Stiffness kpist and Energy Dissipation Caused by Piston Slide Out
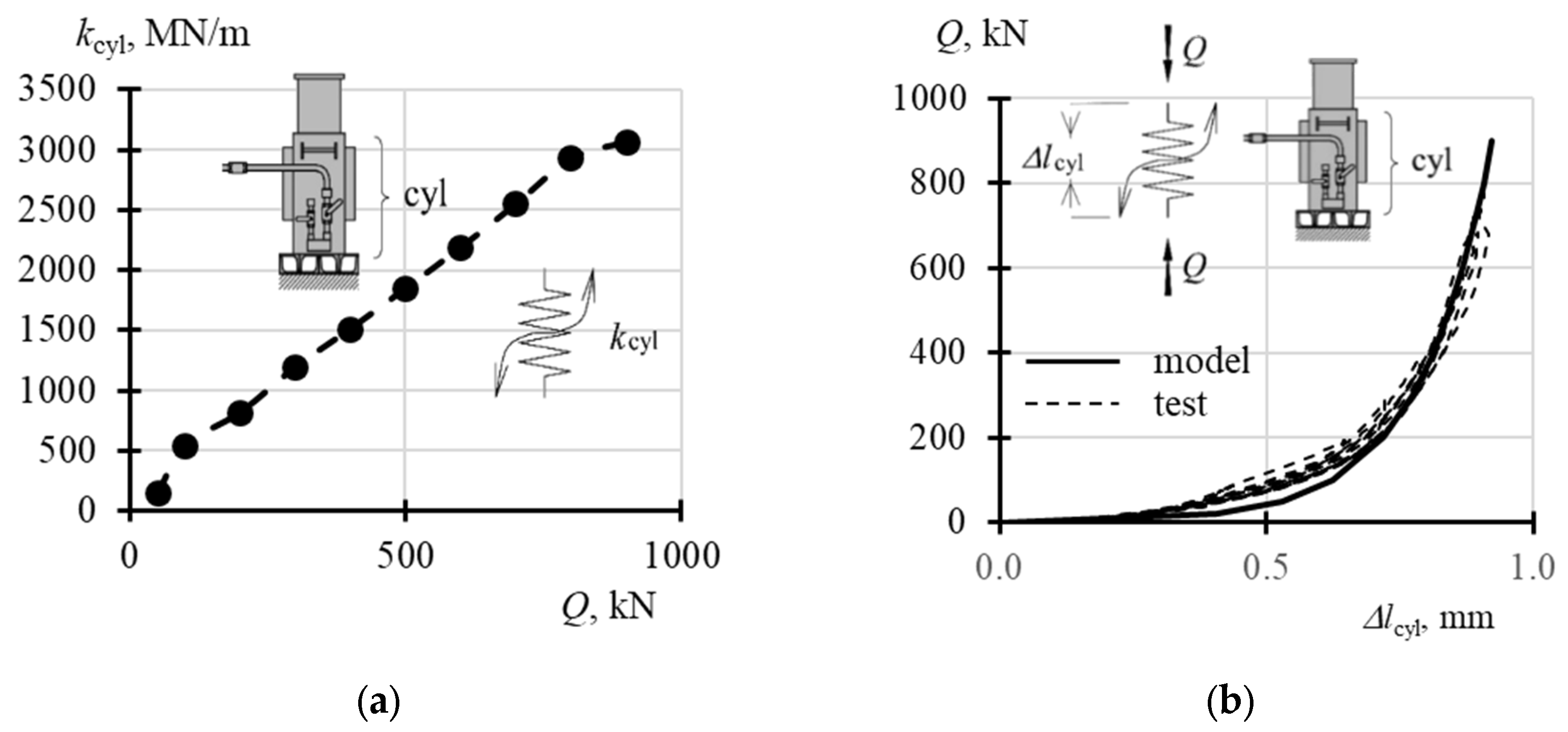
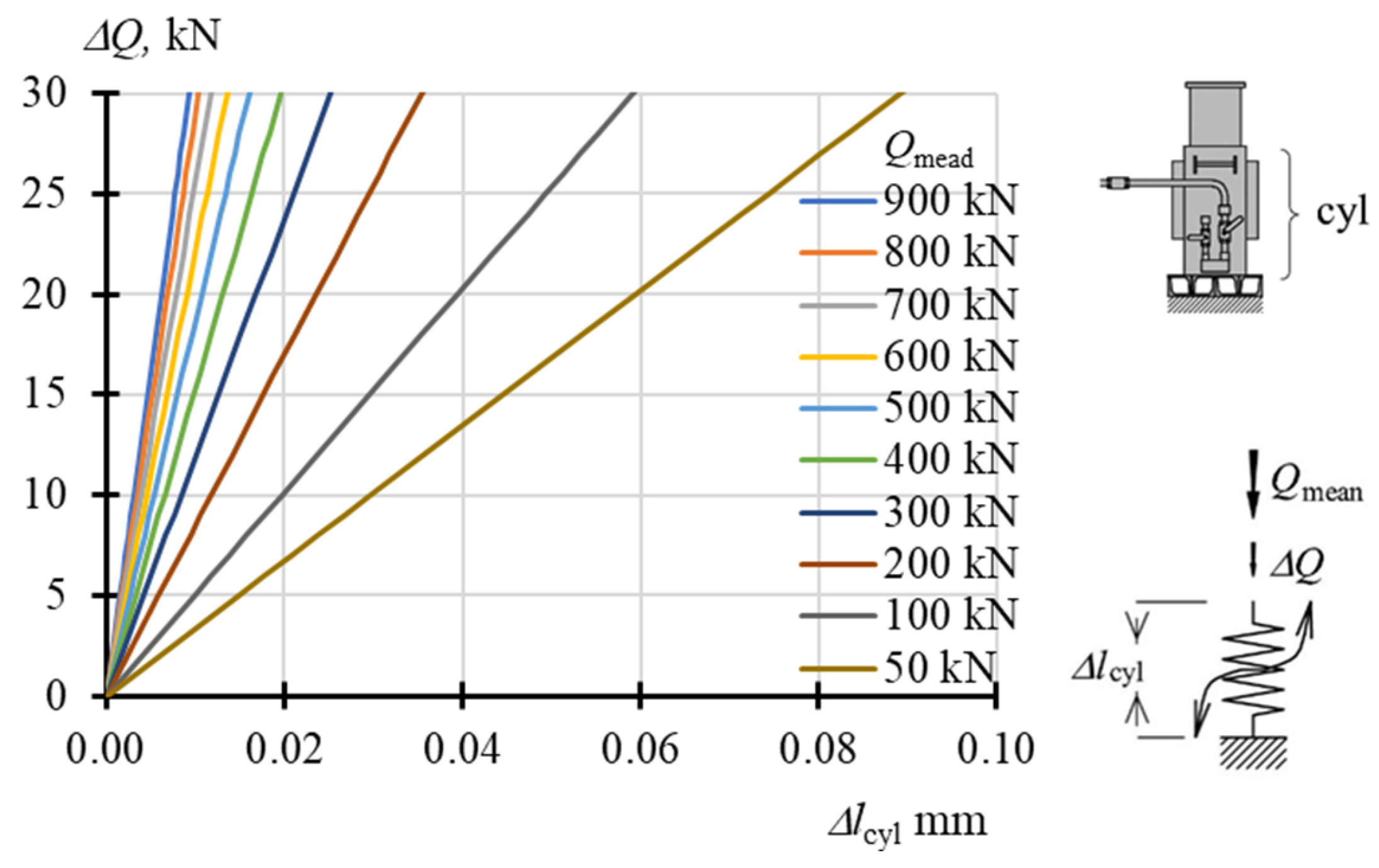
4.2.2. Stiffness kcyl
4.2.3. Jack Stiffnesses kjack
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zaretskii, Y.K.; Kapustin, V.K.; Lushnikov, V.V.; Sukanov, V.I. Predicting the Stability of the Nev’yansk Tower. Soil. Mech. Found. Eng. 1981, 18, 242–247. [Google Scholar] [CrossRef]
- Burland, J.B.; Jamiolkowski, M.; Viggiani, C. The Stabilisation of the Leaning Tower of Pisa. Soils Found. 2003, 43, 63–80. [Google Scholar] [CrossRef]
- Burland, J.; Jamiolkowski, M.; Viggiani, C. Preserving Pisa’s Treasure. Civil Eng. 2002, 72, 42–49. [Google Scholar]
- Abruzzese, D.; Miccoli, L.; Yuan, J. Mechanical Behavior of Leaning Masonry Huzhu Pagoda. J. Cult. Herit. 2009, 10, 480–486. [Google Scholar] [CrossRef]
- Yonglin, S.; Lixin, W.; Zhi, W. Identification of Inclined Buildings from Aerial LIDAR Data for Disaster Management. In Proceedings of the 2010 18th International Conference on Geoinformatics, Beijing, China, 18–20 June 2010; IEEE: New York, NY, USA, 2010; pp. 1–5. [Google Scholar]
- Tokimatsu, K.; Hino, K.; Suzuki, H.; Ohno, K.; Tamura, S.; Suzuki, Y. Liquefaction-Induced Settlement and Tilting of Buildings with Shallow Foundations Based on Field and Laboratory Observation. Soil. Dyn. Earthq. Eng. 2019, 124, 268–279. [Google Scholar] [CrossRef]
- Dudek, M.; Rusek, J.; Tajduś, K.; Słowik, L. Analysis of Steel Industrial Portal Frame Building Subjected to Loads Resulting from Land Surface Uplift Following the Closure of Underground Mine. Arch. Civil Eng. 2021, LXVII, 283–298. [Google Scholar] [CrossRef]
- Macchi, G. Stabilization of the Leaning Tower of Pisa. In Proceedings of the Structures Congress 2005, New York, NY, USA, 20–24 April 2005; American Society of Civil Engineers: New York, NY, USA, 2005; pp. 1–11. [Google Scholar]
- Gromysz, K. Revitalisation of a Vertically Deflected Historical 16th Century Bell Tower. IOP Conf. Ser. Mater. Sci. Eng. 2019, 471, 052025. [Google Scholar] [CrossRef]
- Zhang, X.; Shan, R.; Lu, M. Rectification of Jacking Method for Brick-Wooden Buildings in Deformation Analysis with CFST Reinforcement. Struct. Des. Tall Spec. Build. 2018, 27, e1439. [Google Scholar] [CrossRef]
- Kaszowska, O.; Gruchlik, P.; Mika, W. Industrial Chimney Monitoring-Contemporary Methods. E3S Web Conf. 2018, 36, 01005. [Google Scholar] [CrossRef]
- Pellegrinelli, A.; Furini, A.; Russo, P. Earthquakes and Ancient Leaning Towers: Geodetic Monitoring of the Bell Tower of San Benedetto Church in Ferrara (Italy). J. Cult. Herit. 2014, 15, 687–691. [Google Scholar] [CrossRef]
- Gromysz, K. Analysis of Parameters of a Rectified Tank on the Basis of In-Situ Tests. Materials 2021, 14, 3881. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.; Liu, Z. Study on Stabilization and Rectification Technology for Inclined Transmission Tower. Rock. Soil. Mech. 2008, 29, 173–176. [Google Scholar]
- Baracous, A. The Foundation Failure of the Transcona Grain Elevator. Eng. J. 1957, 40, 973–977. [Google Scholar]
- Maffei, C.E.M.; Gonçalves, H.H.S. Innovative Techniques Used to Plumb Two 57 m Height Concrete Buildings Leaning 3.8 and 3.1%. Innov. Infrastruct. Solut. 2016, 1, 33. [Google Scholar] [CrossRef]
- Shi, M.L.; Zhang, H.; Zhang, R.K. The Inclination of Bridge Pier Due to Neighboring Embankment Construction and Its Rectification Technique. Appl. Mech. Mater. 2013, 353–356, 79–83. [Google Scholar] [CrossRef]
- Peng, C. The Application of Dynamic Replacement Method in Deviation Rectification of Support Pile. IOP Conf. Ser. Earth Environ. Sci. 2017, 61, 012099. [Google Scholar] [CrossRef]
- Yuan, G.; Shu, Q.; Zhang, Y.; Liu, T.; Ji, Y.; Xu, G. Model Experiment on Anti-Deformation Performance of a Self-Supporting Transmission Tower in a Subsidence Area. Int. J. Min. Sci. Technol. 2012, 22, 57–61. [Google Scholar] [CrossRef]
- Rapoport, V.; Alford, J. Preloading of Independent Leg Units at Locations with Difficult Seabed Conditions. Mar. Struct. 1989, 2, 451–462. [Google Scholar] [CrossRef]
- Terracina, F. Foundations of the Tower of Pisa. Géotechnique 1962, 12, 336–339. [Google Scholar] [CrossRef]
- Pesci, A.; Casula, G.; Boschi, E. Laser Scanning the Garisenda and Asinelli Towers in Bologna (Italy): Detailed Deformation Patterns of Two Ancient Leaning Buildings. J. Cult. Herit. 2011, 12, 117–127. [Google Scholar] [CrossRef]
- Kratzsch, H. Mining Subsidence Engineeting; Springer: Berlin/Heiderberg, Germany; New York, NY, USA, 1983. [Google Scholar]
- Orwat, J. Influence of Discontinuous Linear Deformation on the Values of Continuous Deformations of a Mining Area and a Building Induced by an Exploitation of Hard Coal Seam. Appl. Sci. 2023, 13, 3549. [Google Scholar] [CrossRef]
- Yilmaz, I.; Marschalko, M. A Leaning Historical Monument Formed by Underground Mining Effect: An Example from Czech Republic. Eng. Geol. 2012, 133–134, 43–48. [Google Scholar] [CrossRef]
- Peck, R.B.; Bryant, F.G. The Bearing-Capacity Failure of the Transcona Elevator. Géotechnique 1953, 3, 201–208. [Google Scholar] [CrossRef]
- Squeglia, N.; Stacul, S.; Abed, A.A.; Benz, T.; Leoni, M. M-PISE: A Novel Numerical Procedure for Pile Installation and Soil Extraction. Application to the Case of Leaning Tower of Pisa. Comput. Geotech. 2018, 102, 206–215. [Google Scholar] [CrossRef]
- Yin, H.P.; Li, C.L.; Xie, Z.Y. Analysis on Deviation Rectification and Reinforcement of Buildings. Adv. Mater. Res. 2011, 255–260, 59–64. [Google Scholar] [CrossRef]
- Elsawwaf, A.; El Sawwaf, M.; Farouk, A.; Aamer, F.; El Naggar, H. Restoration of Tilted Buildings via Micropile Underpinning: A Case Study of a Multistory Building Supported by a Raft Foundation. Buildings 2023, 13, 422. [Google Scholar] [CrossRef]
- Gromysz, K.; Szoblik, Ł.; Cyrulik, E.; Tanistra-Różanowska, A.; Drabczyk, Z.; Jancia, S. Analysis of Stabilisation Method of Gable Walls of a Barrack Located at the Section BI of the Former KL Auschwitz II-Birkenau. MATEC Web Conf. 2019, 284, 08004. [Google Scholar] [CrossRef]
- Gromysz, K. Moving and Straightening the Building Segment. IOP Conf. Ser. Mater. Sci. Eng. 2019, 471, 052026. [Google Scholar] [CrossRef]
- Gromysz, K. A Bar Model of a Temporary Wooden Support Used to Remove Deflections of Buildings. J. Phys. Conf. Ser. 2021, 1781, 012024. [Google Scholar] [CrossRef]
- Gromysz, K. In Situ Experimental Study on the Active Support Used for Building Rectification. Materials 2020, 13, 2015. [Google Scholar] [CrossRef]
- Smolana, M.; Gromysz, K. Effect of Eccentricity of Applied Force and Geometrical Imperfections on Stiffness of Stack of Cuboidal Steel Elements. Materials 2020, 13, 3174. [Google Scholar] [CrossRef] [PubMed]
- Pichler, F.; Witteveen, W.; Fischer, P. A Complete Strategy for Efficient and Accurate Multibody Dynamics of Flexible Structures with Large Lap Joints Considering Contact and Friction. Multibody Syst. Dyn. 2017, 40, 407–436. [Google Scholar] [CrossRef]
- Zhang, D.; Scarpa, F.; Ma, Y.; Boba, K.; Hong, J.; Lu, H. Compression Mechanics of Nickel-Based Superalloy Metal Rubber. Mater. Sci. Eng. A 2013, 580, 305–312. [Google Scholar] [CrossRef]
- Beck, J.L.; Pei, J.-S. Demonstrating the Power of Extended Masing Models for Hysteresis through Model Equivalencies and Numerical Investigation. Nonlinear Dyn. 2022, 108, 827–856. [Google Scholar] [CrossRef]
- Nogueiro, P.; Silva, L.S.; Bento, R.; Simões, R. Calibration of Model Parameters for the Cyclic Response of End-Plate Beamto-Column Steel-Concrete Composite Joints. Steel Compos. Struct. 2009, 9, 39–58. [Google Scholar] [CrossRef]
- Wojewoda, J.; Stefański, A.; Wiercigroch, M.; Kapitaniak, T. Hysteretic Effects of Dry Friction: Modelling and Experimental Studies. Phil. Trans. R. Soc. A 2008, 366, 747–765. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Hysteresis Loop | Qmax, kN | Δlpist-max, mm | ψoil, MPa·mm | poil-max, MPa | Npist-fr-max, kN | koil 10−3·m2 | Npist-el-max, kN | kpist, MN/m | ψpist, kN·mm | χpist, - |
|---|---|---|---|---|---|---|---|---|---|---|
| 50 kN | 48.43 | 0.336 | 16.85 | 1.79 | 9.78 | 22.43 | 38.65 | 115 | 2.932 | 0.376 |
| 100 kN | 87.35 | 0.728 | 15.86 | 3.70 | 3.75 | 19.78 | 83.60 | 115 | 3.506 | 0.095 |
| 200 kN | 194.67 | 1.430 | 67.61 | 8.13 | 7.81 | 21.58 | 186.86 | 131 | 12.615 | 0.089 |
| 300 kN | 288.04 | 2.093 | 163.61 | 11.71 | 13.34 | 22.39 | 274.71 | 131 | 30.562 | 0.101 |
| 400 kN | 389.77 | 2.699 | 270.84 | 15.88 | 16.47 | 22.70 | 373.30 | 138 | 47.560 | 0.094 |
| 500 kN | 484.47 | 3.257 | 416.51 | 19.77 | 20.46 | 22.79 | 464.01 | 142 | 70.510 | 0.096 |
| 600 kN | 587.73 | 3.857 | 551.73 | 24.01 | 22.41 | 22.96 | 565.31 | 147 | 90.600 | 0.088 |
| 700 kN | 683.32 | 4.386 | 668.15 | 28.01 | 23.37 | 23.09 | 659.95 | 150 | 106.995 | 0.080 |
| 800 kN | 788.81 | 5.002 | 780.57 | 32.36 | 23.69 | 23.22 | 765.12 | 153 | 122.680 | 0.071 |
| 900 kN | 896.75 | 5.935 | 801.35 | 37.07 | 21.31 | 23.28 | 875.44 | 148 | 130.160 | 0.053 |
| Load Range | Ncyl-el,max, kN | Δlcyl,max, mm | βcyl, 1/mm | kcyl, MN/m |
|---|---|---|---|---|
| 0–50–0 | 48.43 | 0.553 | 3.05 | 152 |
| 0–100–0 | 87.35 | 0.356 | 5.46 | 546 |
| 0–200–0 | 194.67 | 0.557 | 4.11 | 822 |
| 0–300–0 | 288.04 | 0.616 | 4.00 | 1199 |
| 0–400–0 | 389.77 | 0.684 | 3.79 | 1516 |
| 0–500–0 | 484.47 | 0.725 | 3.71 | 1853 |
| 0–600–0 | 587.73 | 0.758 | 3.65 | 2192 |
| 0–700–0 | 683.32 | 0.777 | 3.65 | 2553 |
| 0–800–0 | 788.81 | 0.791 | 3.66 | 2930 |
| 0–900–0 | 896.75 | 0.867 | 3.41 | 3065 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gromysz, K.; Smolana, M.; Drusa, M. Research on the Characteristics of Jacks Used to Rectify Tilted Buildings. Buildings 2024, 14, 1581. https://doi.org/10.3390/buildings14061581
Gromysz K, Smolana M, Drusa M. Research on the Characteristics of Jacks Used to Rectify Tilted Buildings. Buildings. 2024; 14(6):1581. https://doi.org/10.3390/buildings14061581
Chicago/Turabian StyleGromysz, Krzysztof, Mateusz Smolana, and Marian Drusa. 2024. "Research on the Characteristics of Jacks Used to Rectify Tilted Buildings" Buildings 14, no. 6: 1581. https://doi.org/10.3390/buildings14061581
APA StyleGromysz, K., Smolana, M., & Drusa, M. (2024). Research on the Characteristics of Jacks Used to Rectify Tilted Buildings. Buildings, 14(6), 1581. https://doi.org/10.3390/buildings14061581