
Experimental and Numerical Investigations of Mixing Performance of Mixing Agitators of Deep Cement Mixing Ships
 ,
,
Abstract
:1. Introduction
2. Physical Model Tests
2.1. Experimental Set-Up
2.1.1. Drill Bits, Drill Pipes, Blades, Power Head
2.1.2. Torque Measurement Device
2.2. Test Procedures
2.2.1. Soil Sample Preparations
2.2.2. Stirring Test
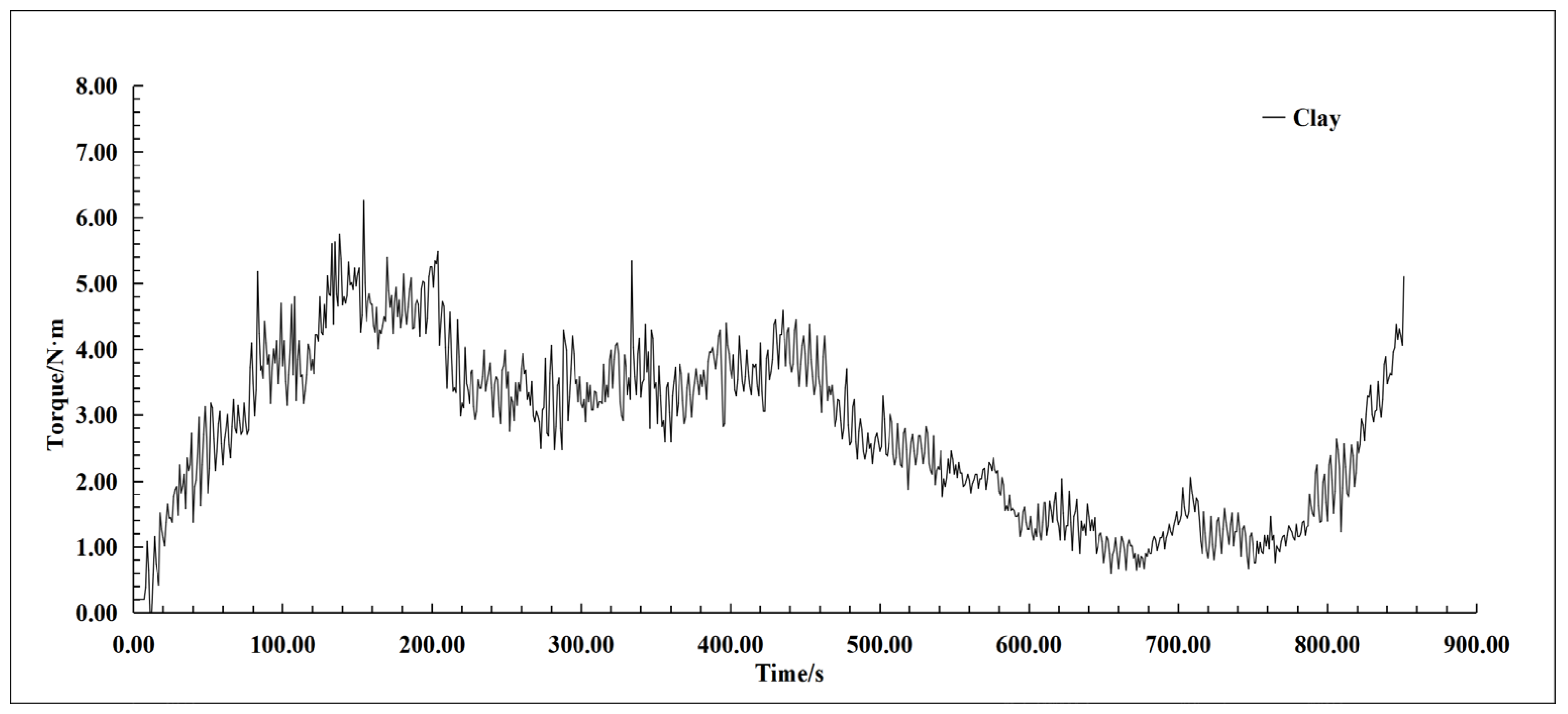
2.3. Test Results
3. Numerical Simulations
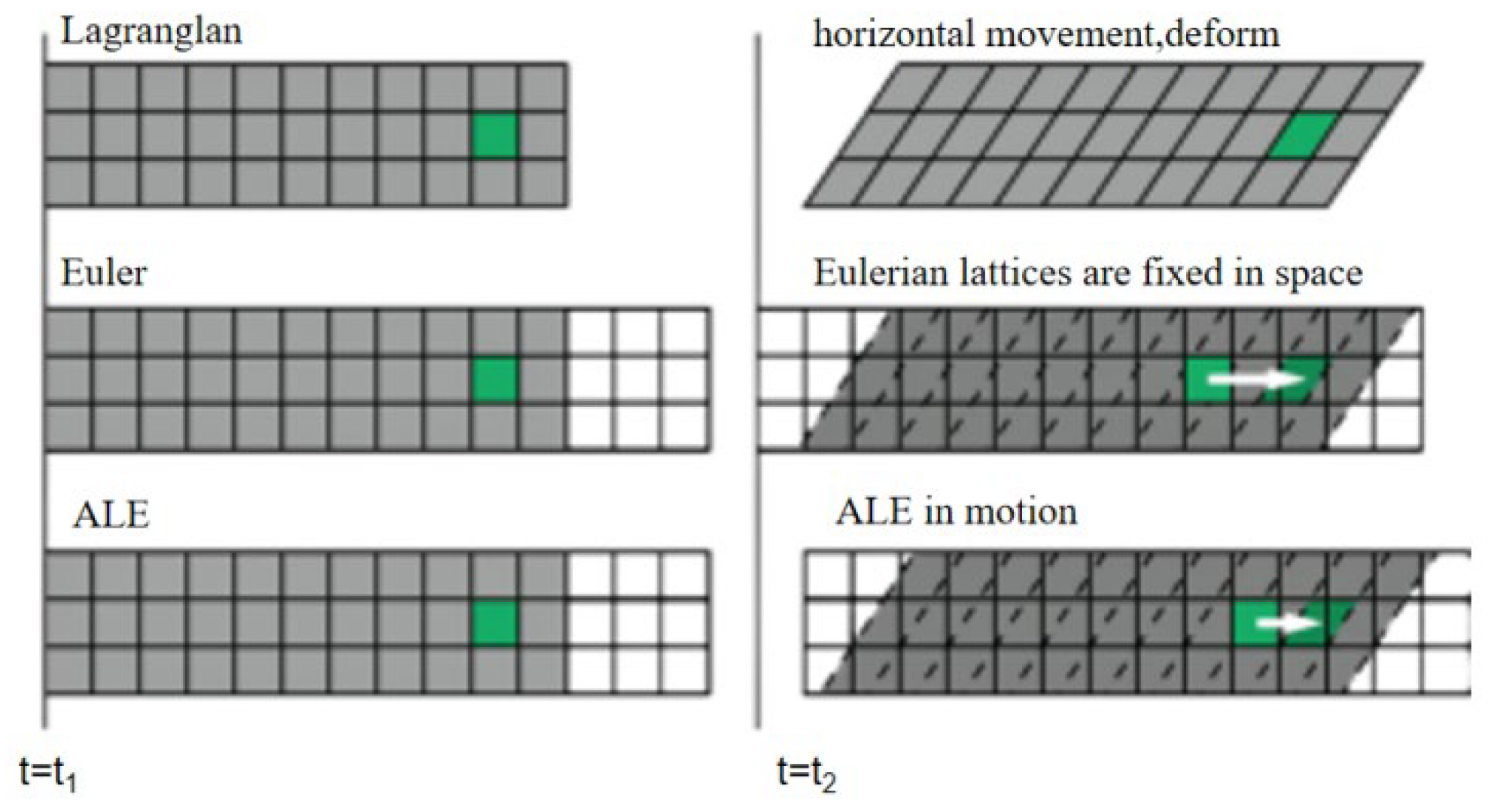
3.1. ALE Method
- The equation of conservation of mass can be expressed as:
- 2.
- The equation of conservation of mass can be expressed as:
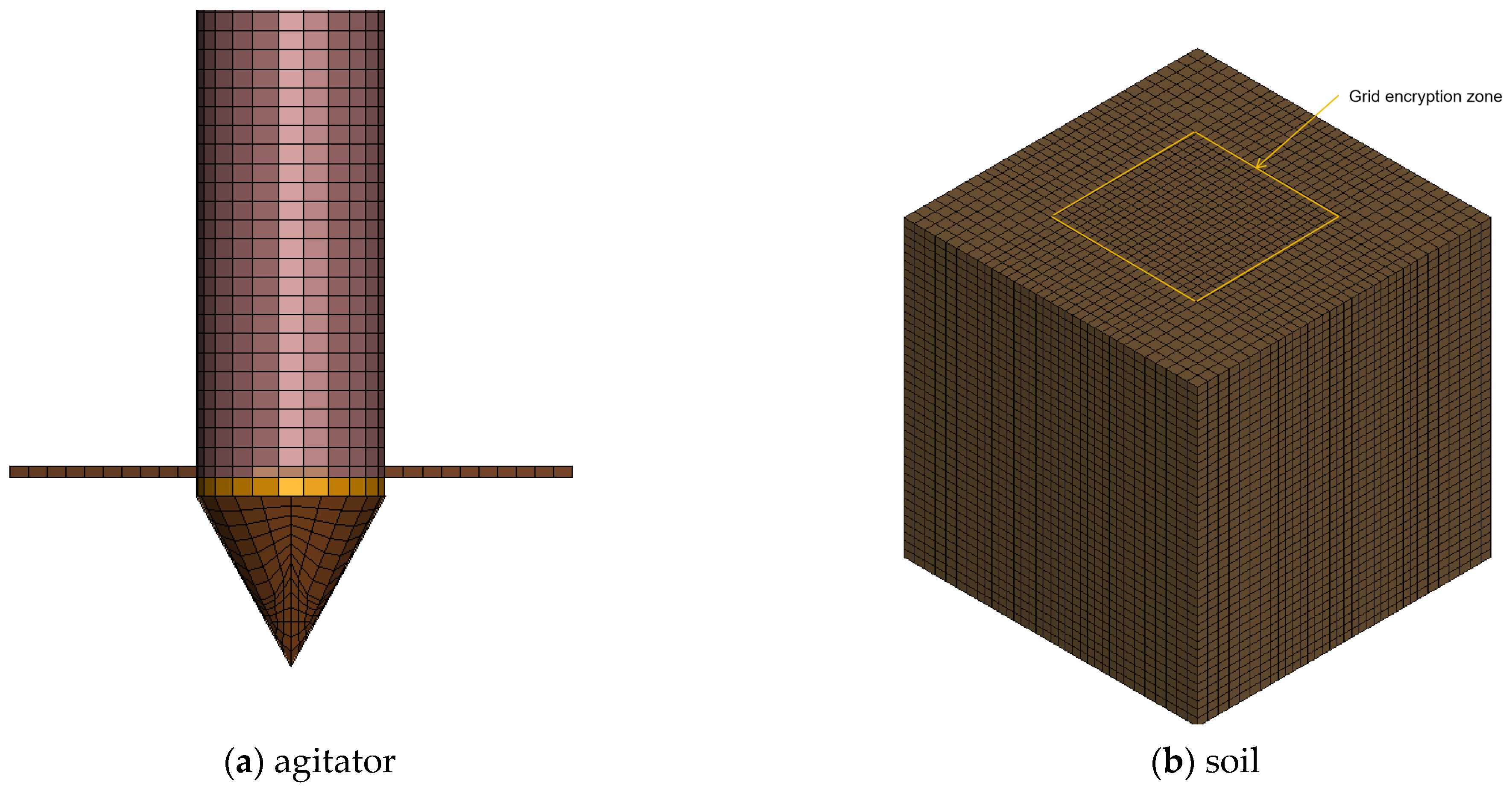
3.2. Numerical Model
3.3. Numerical Cases and Results
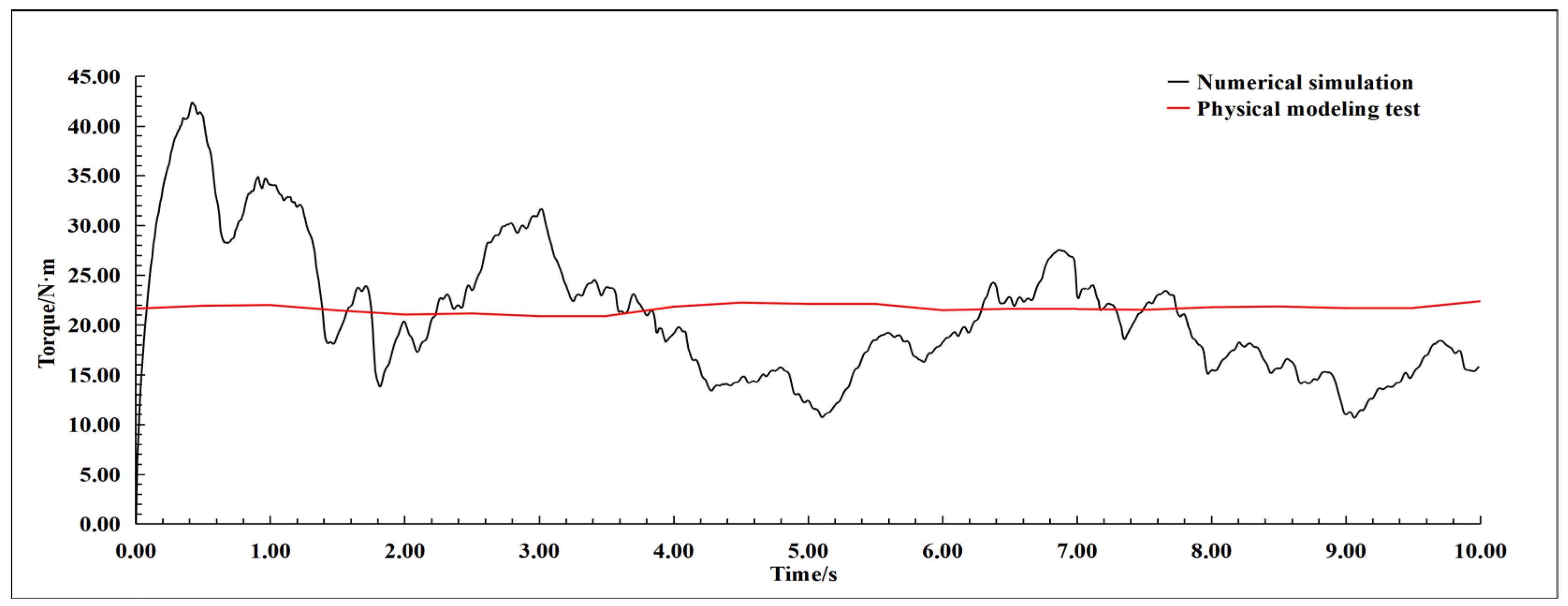
3.3.1. Torque Data for the Three-Blade Mixing Agitator
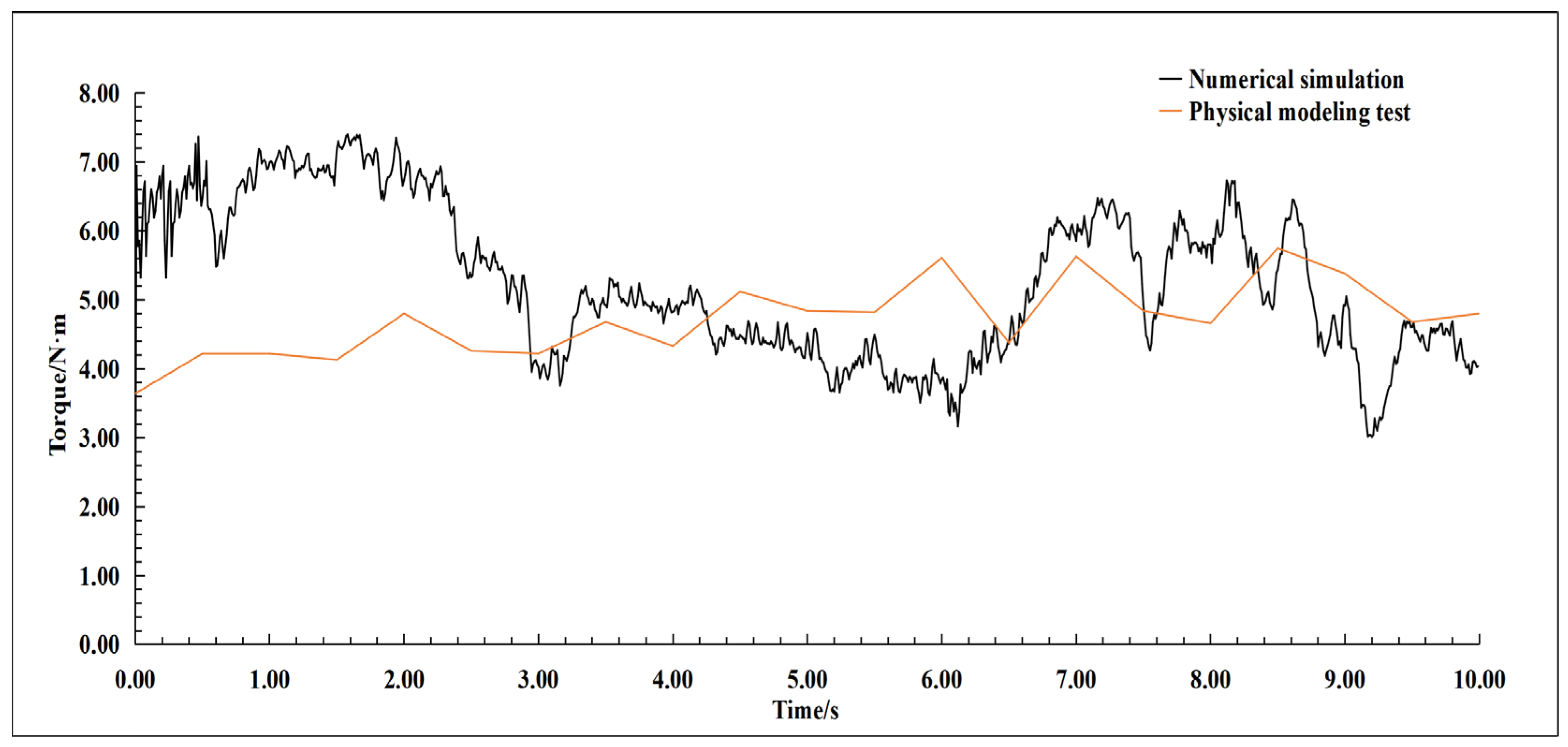
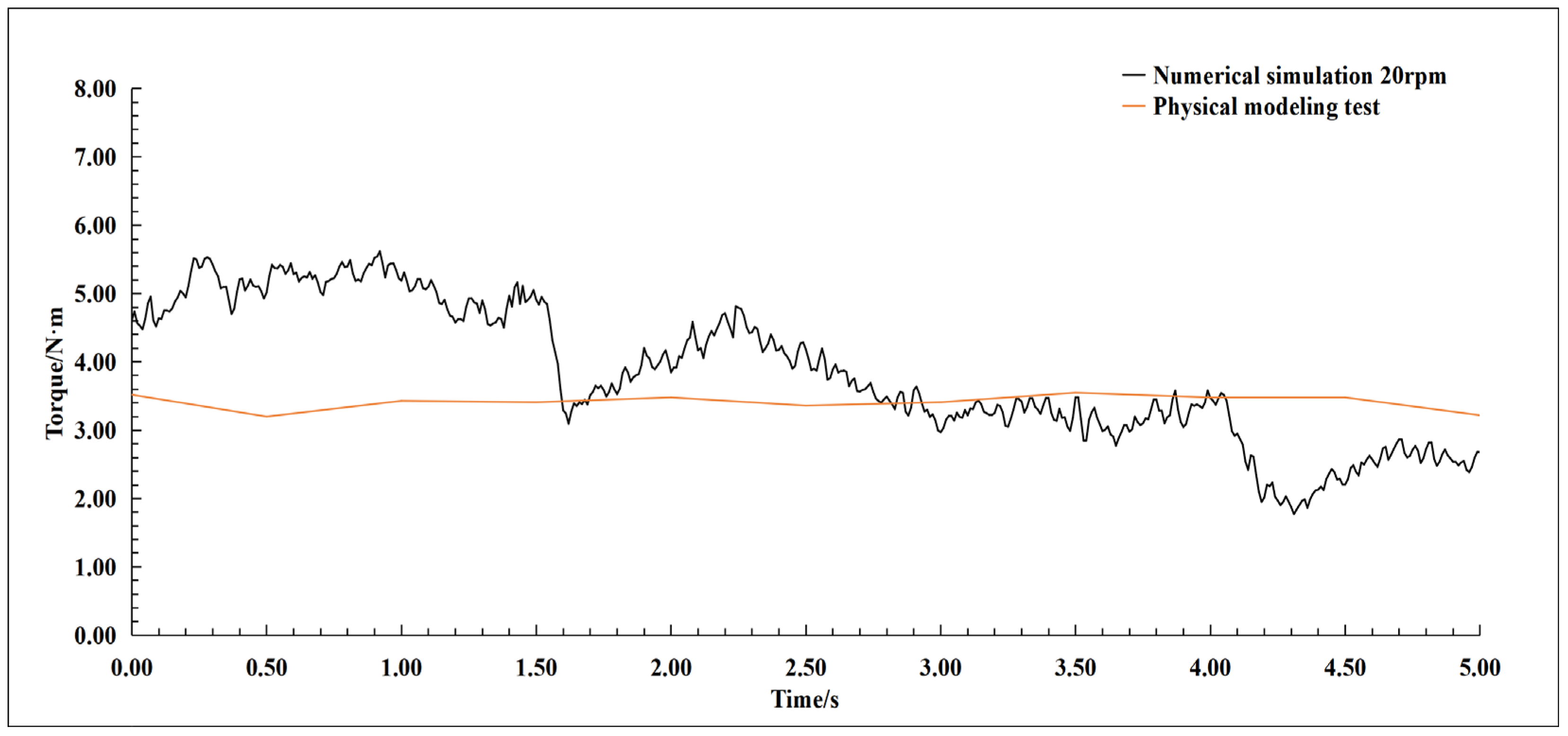
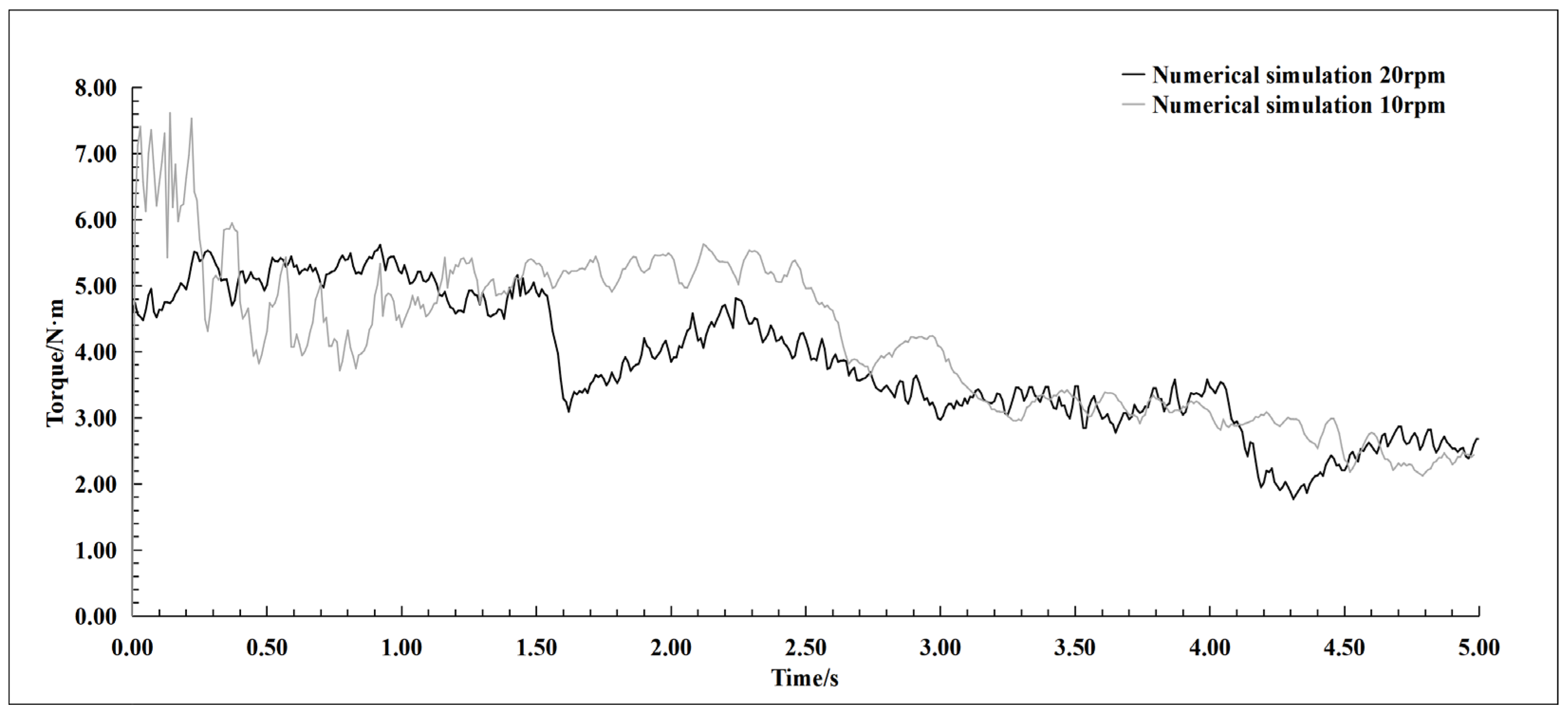
3.3.2. Torque Data for the Two-Blade Mixing Agitator
3.3.3. Discrepancy Analysis
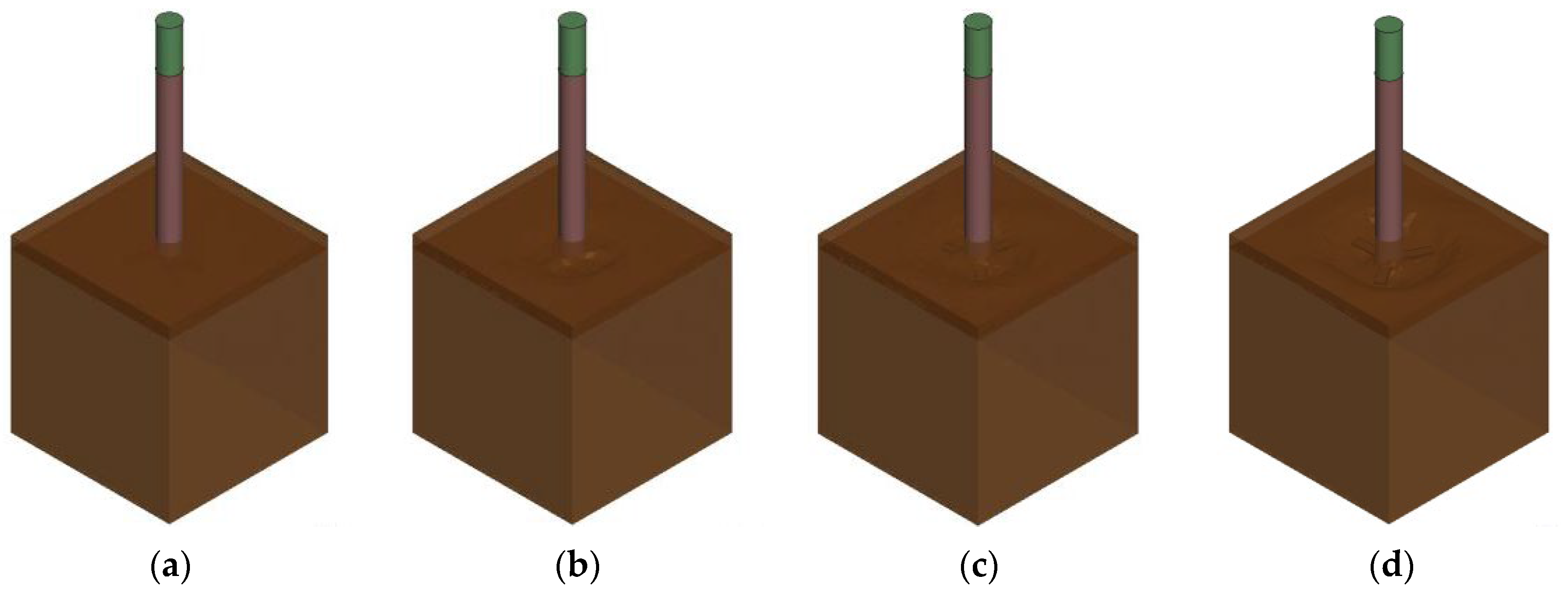
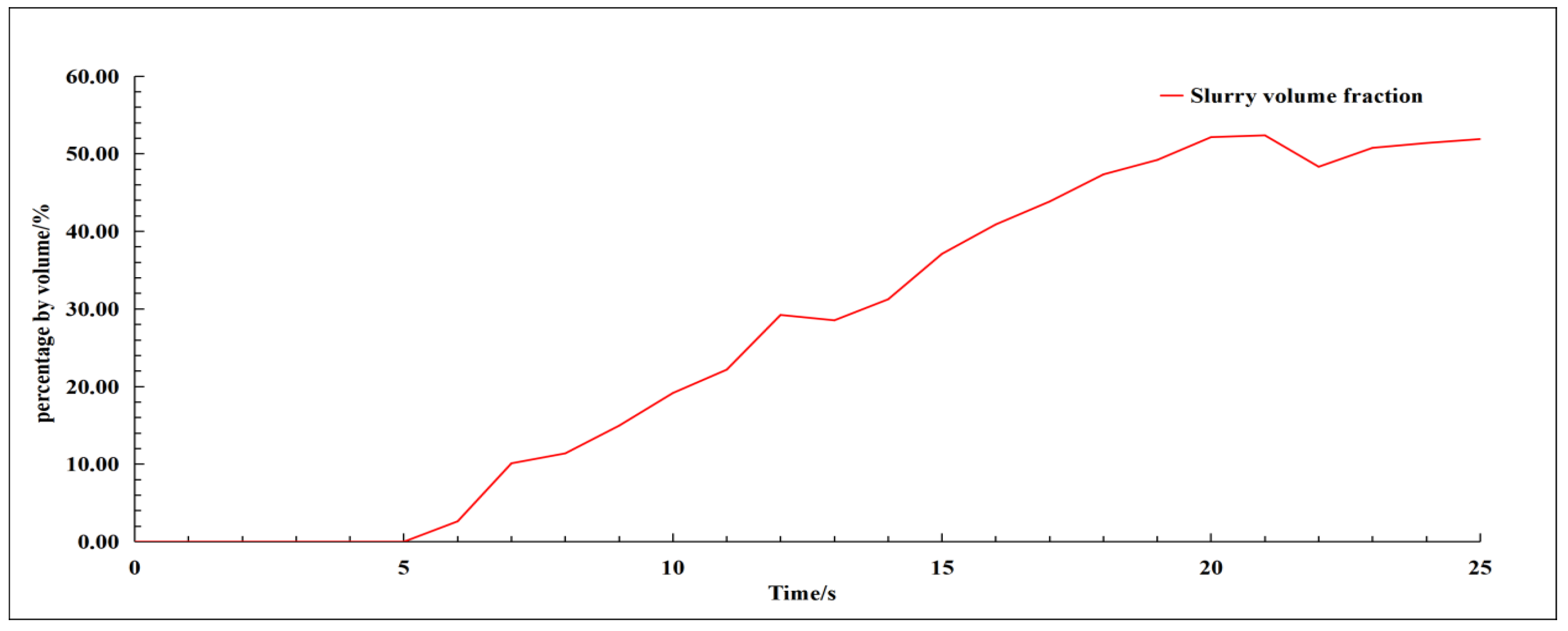
3.3.4. Simulations of Mixing Uniformity
4. Conclusions
- (1)
- In the model test experiments, when we stir the clay using two- and three-blade agitators, we find that the torque required for the two-blade agitator is slightly larger than that for the three-blade one. The difference between the two is around 1.302 N·m. This difference is not significant, indicating that although the number of blades has an effect on the mixing torque, this effect may not constitute a decisive factor in practice.
- (2)
- By comparing experimental and simulation results, the capacity of the introduced ALE method in simulating the mixing behaviors of agitators has been demonstrated, but there are some errors. The numerical results show that the average torque value is smaller at a higher rotational speed when the clay is mixed using a two-blade mixer. The difference between the two is 0.415 N·m. The rotational speed has a smaller effect on the torque history.
- (3)
- In simulating the mixing behavior of two different materials, the homogeneity of the mixing of the two materials can be effectively described using the volume fraction of each material within elements.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Shu, B.; Gong, H.; Chen, S.; Ren, Y.; Li, Y.; Yang, T.; Zeng, G.; Zhou, M.; Barbieri, D.M.; Li, Y. Case study of solid waste based soft soil solidifying materials applied in deep mixing pile. Buildings 2022, 12, 1193. [Google Scholar] [CrossRef]
- Su, G.; Liu, H.; Dai, G.; Chen, X.; Deng, Y. Dynamic Analysis of a Concrete-Cored Deep Cement Mixing Pile under Horizontal Dynamic Loads. Buildings 2023, 13, 1378. [Google Scholar] [CrossRef]
- Bao, H.; Peng, J.; Cheng, Z.; Hong, J.; Gao, Y. Experimental Study on Inner Interface Mechanical Properties of the ESDCM Pile with Steel Core. Buildings 2023, 13, 486. [Google Scholar] [CrossRef]
- Zhou, M.; Li, Z.; Han, Y.; Ni, P.; Wang, Y. Experimental study on the vertical bearing capacity of stiffened deep cement mixing piles. Int. J. Geomech. 2022, 22, 04022043. [Google Scholar] [CrossRef]
- Ter-Martirosyan, A.; Sidorov, V.; Sobolev, E. Dynamic Properties of Soil Cements for Numerical Modelling of the Foundation’s Basis Transformed under the Technology of Deep Soil Mixing: A Determination Method. Buildings 2022, 12, 1028. [Google Scholar] [CrossRef]
- Lee, H.; Kim, S.; Kang, B.; Lee, K. Long-Term Settlement Prediction of Ground Reinforcement Foundation Using a Deep Cement Mixing Method in Reclaimed Land. Buildings 2022, 12, 1279. [Google Scholar] [CrossRef]
- Wang, N.; Zhang, W. Centrifuge model test of pier ground improved by CDM. Chin. J. Geotech. Eng. 2001, 23, 634–638. [Google Scholar]
- Hu, Y.; Luo, Q.; Zhang, L.; Huang, J.; Chen, Y. Deformation characteristics analysis of slope soft soil foundation treatment with mixed-in-place pile by centrifugal model tests. Rock Soil Mech. 2010, 31, 2207–2213. [Google Scholar]
- Zhu, N.; Liu, C.; Wang, W.; Zhao, X. Centrifugal model test on reinforcement methods and consolidation settlement of marshy and lacustrine soft soils. J. Yangtze River Sci. Res. Inst. 2019, 36, 84–89, 97. [Google Scholar]
- Chi, L.; Kushwaha, R. A non-linear 3-D finite element analysis of soil failure with tillage tools. J. Terramech. 1990, 27, 343–366. [Google Scholar] [CrossRef]
- Fielke, J. Finite element modelling of the interaction of the cutting edge of tillage implements with soil. J. Agric. Eng. Res. 1999, 74, 91–101. [Google Scholar] [CrossRef]
- Mouazen, A.; Nemenyi, M. Tillage tool design by the finite element method: Part 1. Finite element modelling of soil plastic behaviour. J. Agric. Eng. Res. 1999, 72, 37–51. [Google Scholar] [CrossRef]
- Bentaher, H.; Ibrahmi, A.; Hamza, E.; Hbaieb, M.; Kantchev, G.; Maalej, A.; Arnold, W. Finite element simulation of moldboard-soil interaction. Soil Tillage Res. 2013, 134, 11–16. [Google Scholar] [CrossRef]
- Karmakar, S.; Kushwaha, R. Dynamic modeling of soil-tool interaction: An overview from a fluid flow perspective. J. Terramech. 2006, 43, 411–425. [Google Scholar] [CrossRef]
- Zhu, L.; Ge, J.; Cheng, X.; Peng, S.; Qi, Y.; Zhang, S.; Zhu, D. Modeling of share/soil interaction of a horizontally reversible plow using computational fluid dynamics. J. Terramech. 2017, 72, 1–8. [Google Scholar] [CrossRef]
- Shoop, S.; Affleck, R.; Janoo, V.; Haehnel, R.; Barrett, B. Constitutive Model for a Thawing, Frost-Susceptible Sand; U.S. Army Corps of Engineers: Washington, DC, USA, 2005. [Google Scholar]
- Donéa, J.; Fasoli-Stella, P.; Giuliani, S. Lagrangian and Eulerian finite element techniques for transient fluid-structure interaction problems. In Structural Mechanics in Reactor Technology; CRC Press: Boca Raton, FL, USA, 1977. [Google Scholar]
- Belytschko, T.; Kennedy, J. Computer models for subassembly simulation. Nucl. Eng. Des. 1978, 49, 17–38. [Google Scholar] [CrossRef]
- Belytschko, T.; Kennedy, J.M.; Schoeberle, D.F. Quasi-Eulerian finite element formulation for fluid-structure interaction. J. Press. Vessel Technol. 1980, 102, 62–69. [Google Scholar] [CrossRef]
- Hambleton, J.; Drescher, A. On modeling a rolling wheel in the presence of plastic deformation as a three-or two-dimensional process. Int. J. Mech. Sci. 2009, 51, 846–855. [Google Scholar] [CrossRef]
- Bekakosa, C.; Papazafeiropoulosb, G.; O’Boya, D.; Prinsc, J.; Mavrosd, G. Dynamic response of rigid wheels on deformable terrains. J. Adv. Veh. Eng. 2016, 2, 210–218. [Google Scholar]
- Bekakos, C.; Papazafeiropoulos, G.; O’Boy, D.; Prins, J. Finite element modelling of a pneumatic tyre interacting with rigid road and deformable terrain. Int. J. Veh. Perform. 2017, 3, 142–166. [Google Scholar] [CrossRef]
- Zhang, L.; Cai, Z.; Liu, H. A novel approach for simulation of soil-tool interaction based on an arbitrary Lagrangian–Eulerian description. Soil Tillage Res. 2018, 178, 41–49. [Google Scholar] [CrossRef]
- Li, J. Study on 3D-Dynamic Simulation of Shield Cutter. Ph.D. Dissertation, Tianjin University, Tianjin, China, 2019. [Google Scholar]
- Ding, J.; Jin, X.; Guo, Y.; Tang, H.; Yang, H. Study on 3-D Numerical simulation for soil cutting with large deformation. Trans. Chin. Soc. Agric. Mach. 2007, 38, 118–121. [Google Scholar]
- Shen, J.; Jin, X.; Yang, J.; Ling, Y. Dynamic Numerical Simulation of Excavation in Shield Tunnelling. J. Shanghai Jiaotong Univ. 2009, 43, 1017–1020. [Google Scholar]
- Shen, J.; Jin, X.; Li, Y.; Wang, J. Numerical simulation of cutterhead and soil interaction in slurry shield tunneling. Eng. Comput. 2009, 226, 985–1005. [Google Scholar] [CrossRef]
- Soulaimani, A.; Saad, Y. An arbitrary Lagrangian-Eulerian finite element method for solving three-dimensional free surface flows. Comput. Methods Appl. Mech. Eng. 1998, 162, 79–106. [Google Scholar] [CrossRef]
- Souli, M.; Ouahsine, A.; Lewin, L. ALE formulation for fluid–structure interaction problems. Comput. Methods Appl. Mech. Eng. 2000, 190, 659–675. [Google Scholar] [CrossRef]
- Lewis, A. Manual for LS-DYNA Soil Material Model 147 (No. FHWA-HRT-04-095); Federal Highway Administration: Washington, DC, USA, 2004. [Google Scholar]
- Reid, J.; Coon, B.; Lewis, B.; Sutherland, S.; Murray, Y. Evaluation of LS-DYNA Soil Material Model 147 (No. FHWA-HRT-04-094); Federal Highway Administration: Washington, DC, USA, 2004. [Google Scholar]
- MANUAL, K.U.S. LS-DYNA Keyword User’s Manual; LSTC Co.: Livermore, CA, USA, 2007. [Google Scholar]
- Huynh, V.H.; Nguyen, T.; Nguyen, D.P.; Nguyen, T.S.; Nguyen, T.C. A novel direct SPT method to accurately estimate ultimate axial bearing capacity of bored PHC nodular piles with 81 case studies in Vietnam. Soils Found. 2022, 62, 101163. [Google Scholar] [CrossRef]
- Nguyen, T.; Ly, K.D.; Nguyen-Thoi, T.; Nguyen, B.P.; Doan, N.P. Prediction of axial load bearing capacity of PHC nodular pile using Bayesian regularization artificial neural network. Soils Found. 2022, 62, 101203. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Density, kg/m3 | Gravity | Bulk Modulus/Pa | Shear Modulus/Pa | Cohesion/Pa | Angle of Internal Friction/° | Water Content/% |
|---|---|---|---|---|---|---|---|
| Clay | 1840 | 2.74 | 5.6 × 106 | 1.9 × 106 | 5.20 × 103 | 6.9 | 39.8 |
| Silty soil | 1560 | 2.69 | 1.2 × 106 | 0.9 × 106 | 7.6 × 103 | 1.8 | 53.8 |
| Type | Density, kg/m3 | Young’s Modulus/Pa | Poisson’s Ratio |
|---|---|---|---|
| Steels | 7800 | 2.1 × 1011 | 0.3 |
| Type | Density, kg/m3 | Upper Dynamic Viscosity Limit/Pa·s | Lower Dynamic Viscosity Limit/Pa·s | Yield Stress/Pa | Consistency Factor/Pa·Sn |
|---|---|---|---|---|---|
| cement paste | 0.00183 | 40 | 10 | 0.1 | 0.449 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, P.; Teng, C.; Wang, H.; Wan, Y.; Chen, S.; Cao, D.; Zang, M. Experimental and Numerical Investigations of Mixing Performance of Mixing Agitators of Deep Cement Mixing Ships. Buildings 2024, 14, 1809. https://doi.org/10.3390/buildings14061809
Chen P, Teng C, Wang H, Wan Y, Chen S, Cao D, Zang M. Experimental and Numerical Investigations of Mixing Performance of Mixing Agitators of Deep Cement Mixing Ships. Buildings. 2024; 14(6):1809. https://doi.org/10.3390/buildings14061809
Chicago/Turabian StyleChen, Pingshan, Chao Teng, Haiyang Wang, Yuyang Wan, Shunhua Chen, Dingfeng Cao, and Mengyan Zang. 2024. "Experimental and Numerical Investigations of Mixing Performance of Mixing Agitators of Deep Cement Mixing Ships" Buildings 14, no. 6: 1809. https://doi.org/10.3390/buildings14061809