
Study of Void Detection Beneath Concrete Pavement Panels through Numerical Simulation

Abstract
:1. Introduction
2. Principles of GprMax Numerical Simulation
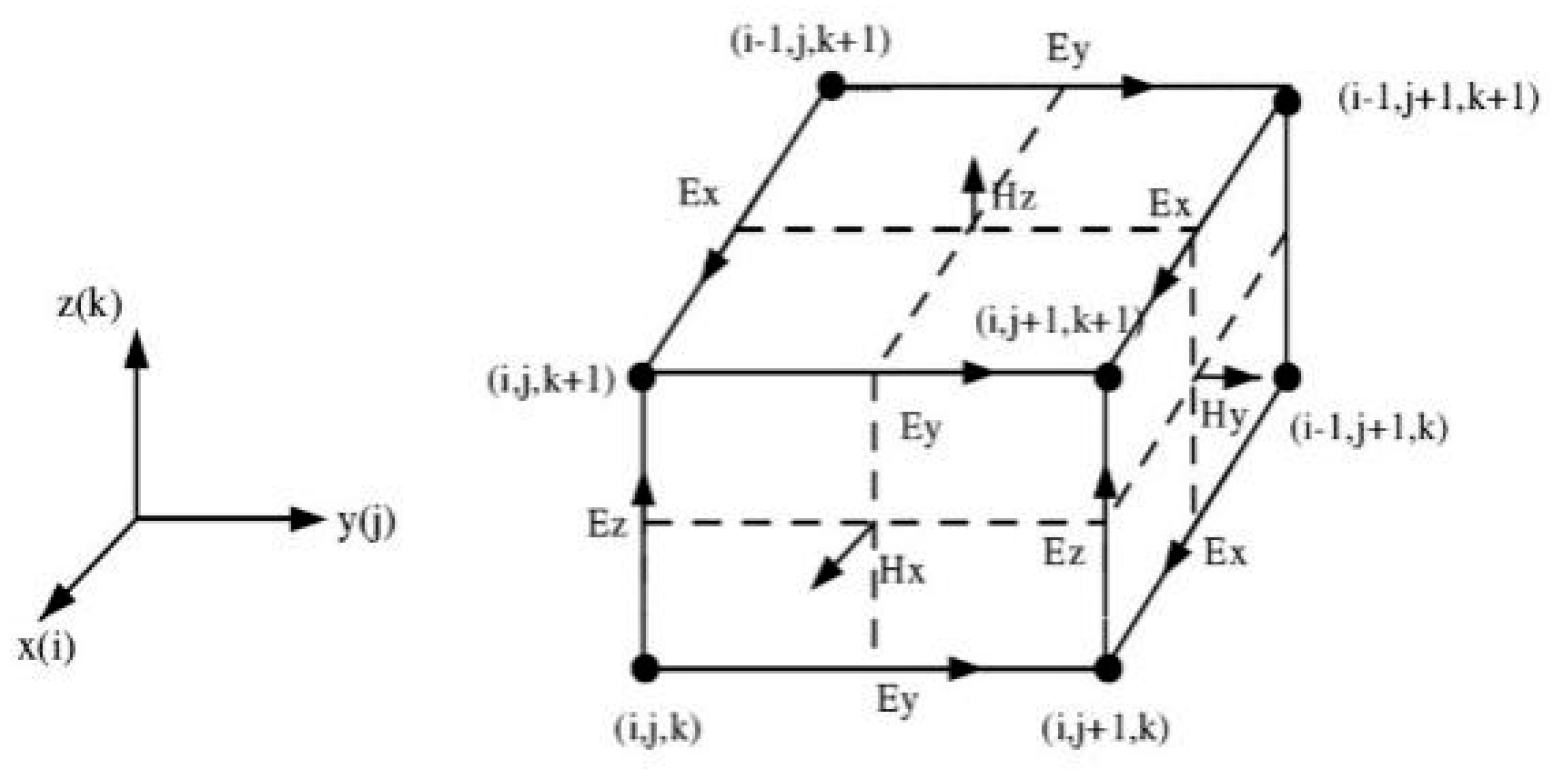
2.1. Discretization Format of Maxwell’s Equations
2.2. Numerical Stability and Numerical Dispersion
2.3. Absorbing Boundary Conditions
3. Building Numerical Simulation Model Based on GprMax
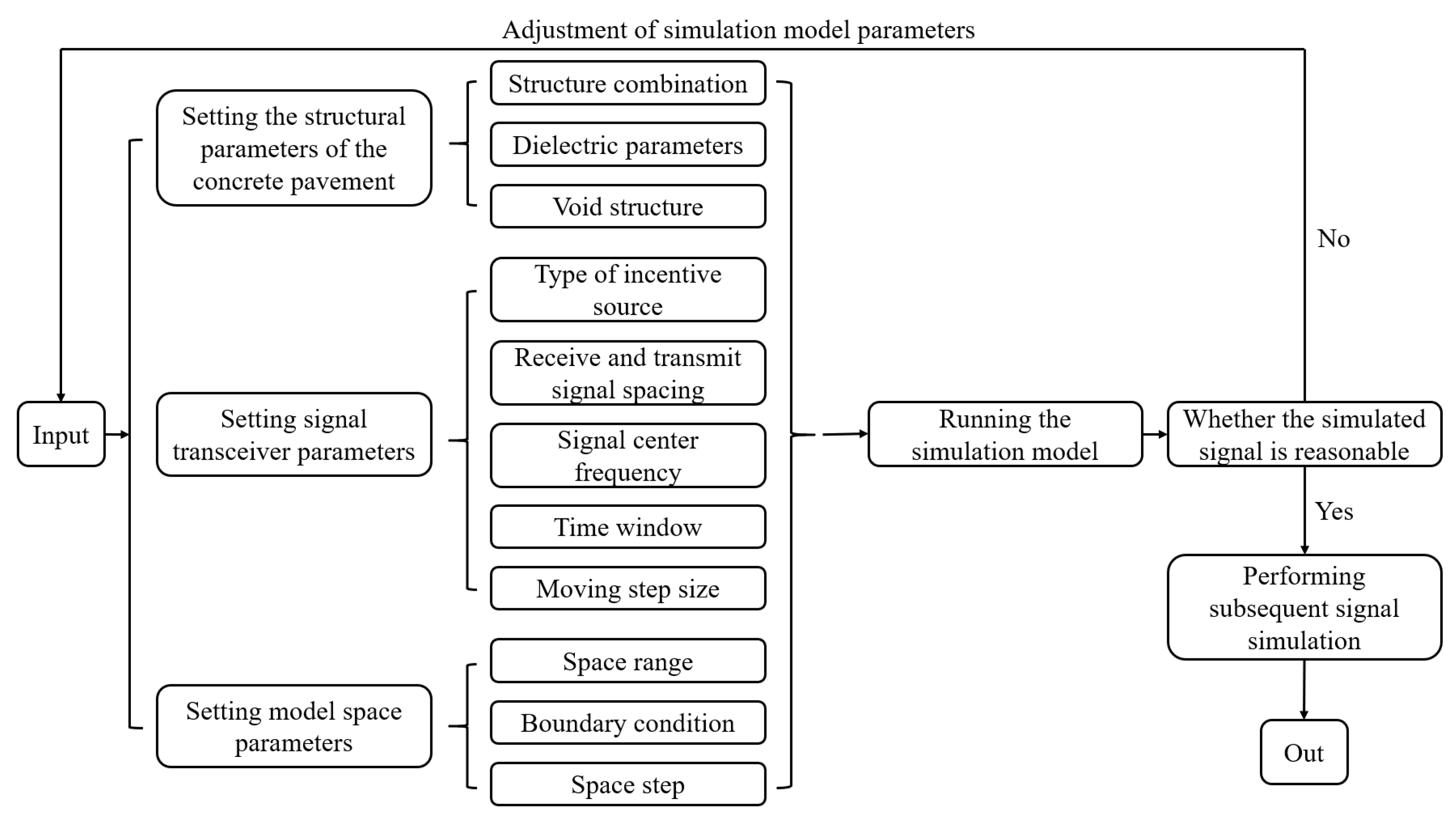
3.1. Modeling Process
3.2. Modeling Parameters
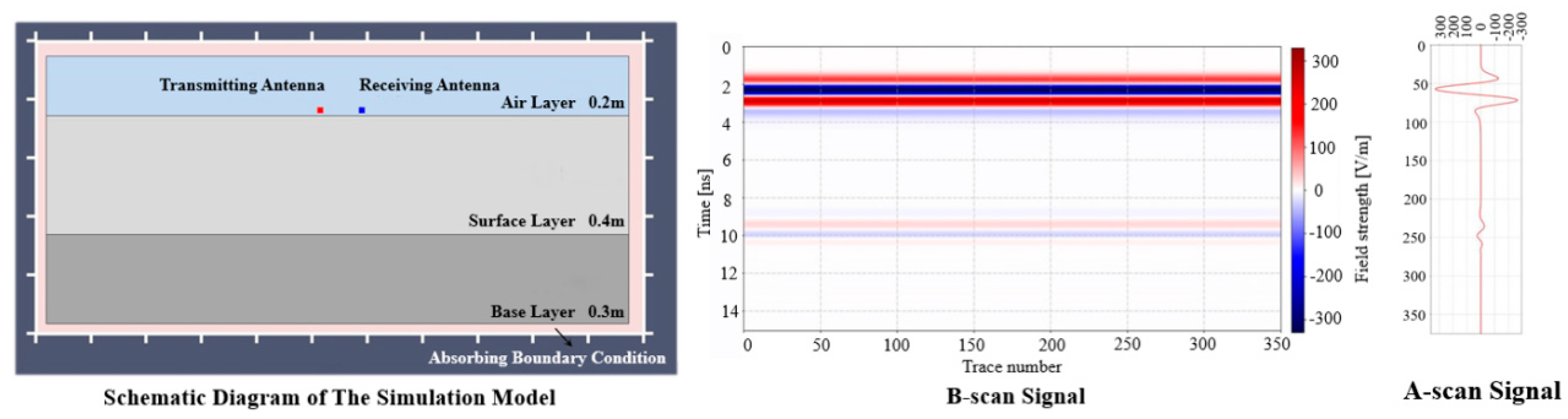
3.2.1. Pavement Structural Parameters
3.2.2. Ground-Penetrating Radar Signal Parameters
3.2.3. Spatial Parameters
4. Numerical Simulation Model Field Verification
4.1. Basic Information of the Test Site
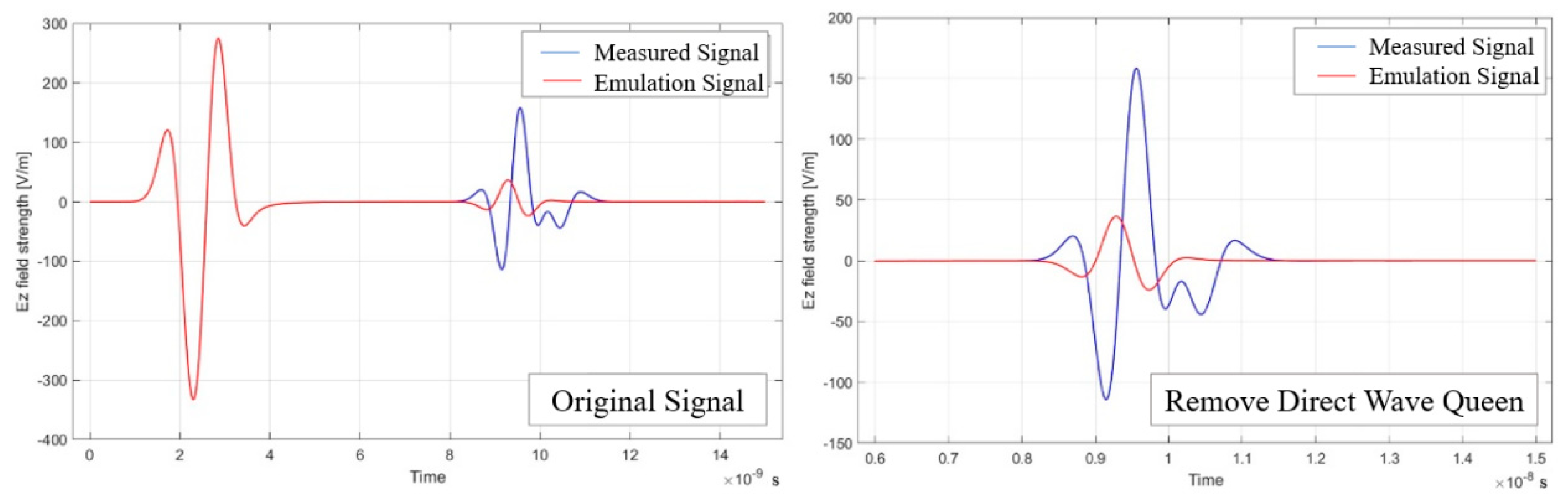
4.2. Analysis of Echo Signal Verification
5. Analysis of Echo Signal Forms in Numerical Simulation Model
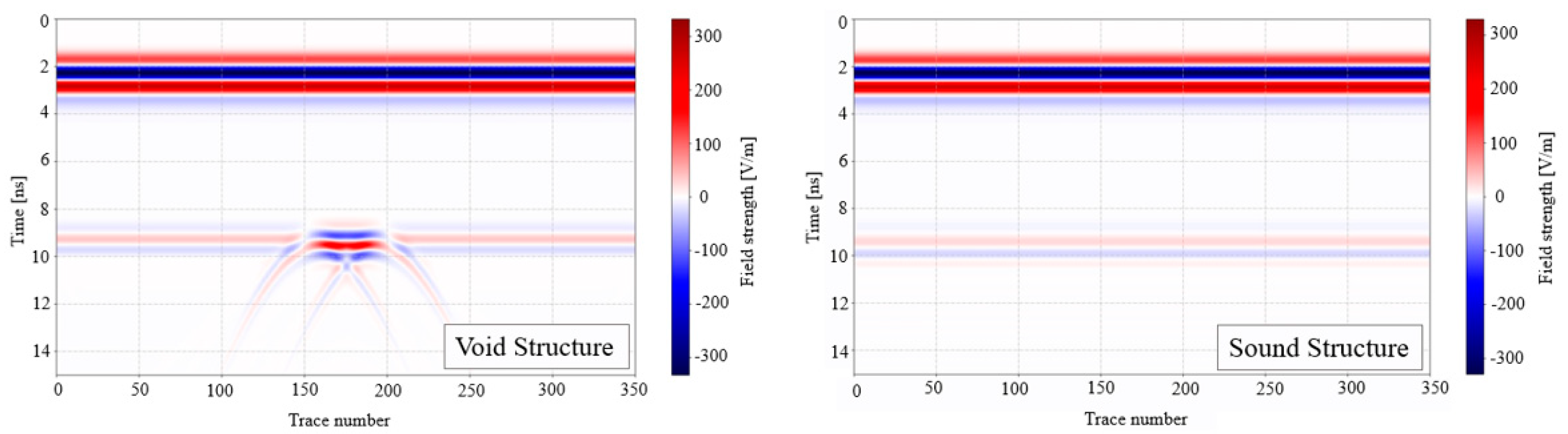
5.1. Analysis of Echo Signal Forms for Void and Intact Structures
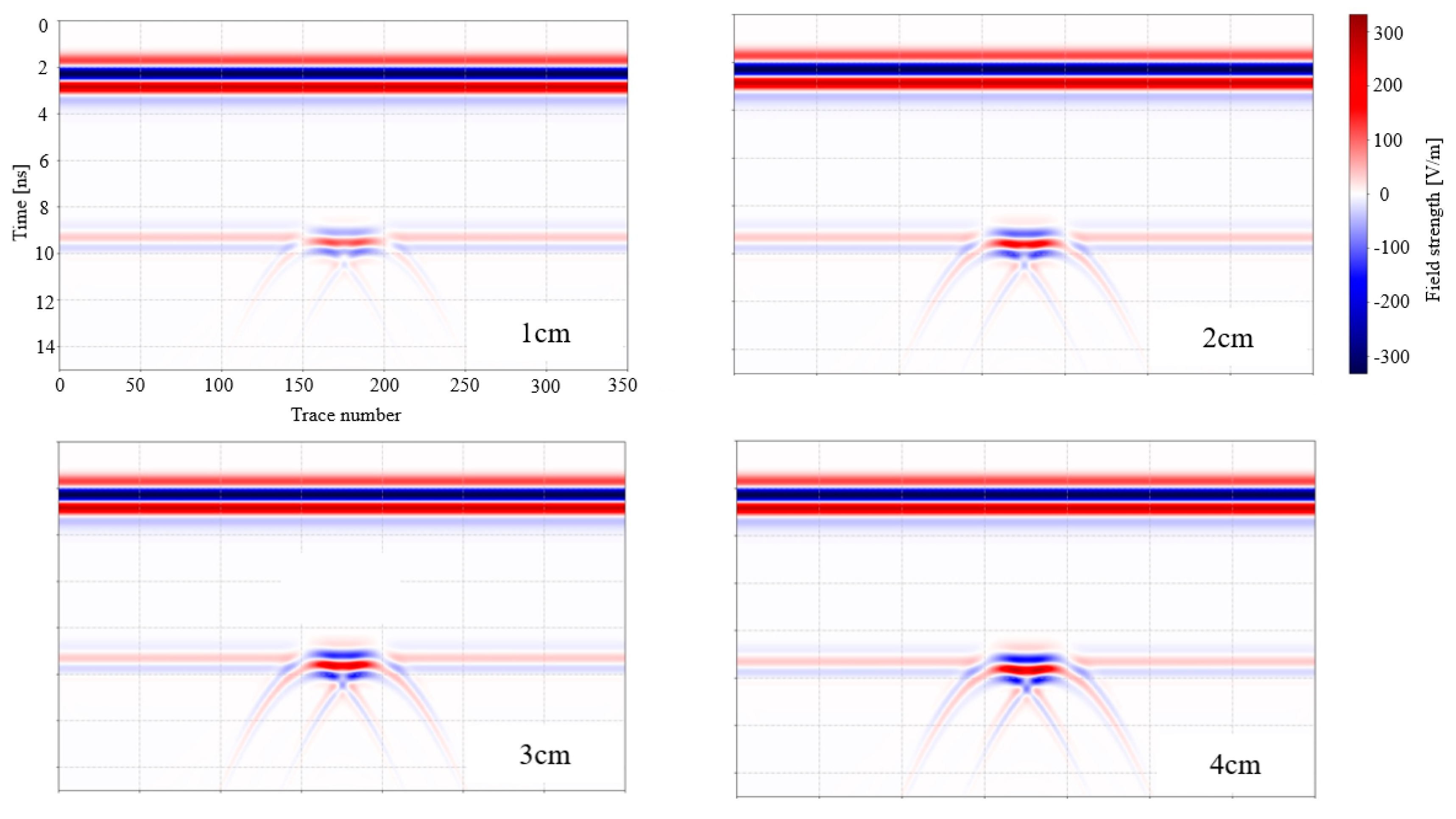
5.2. Analysis of Echo Signal Forms at Different Thicknesses of Voids
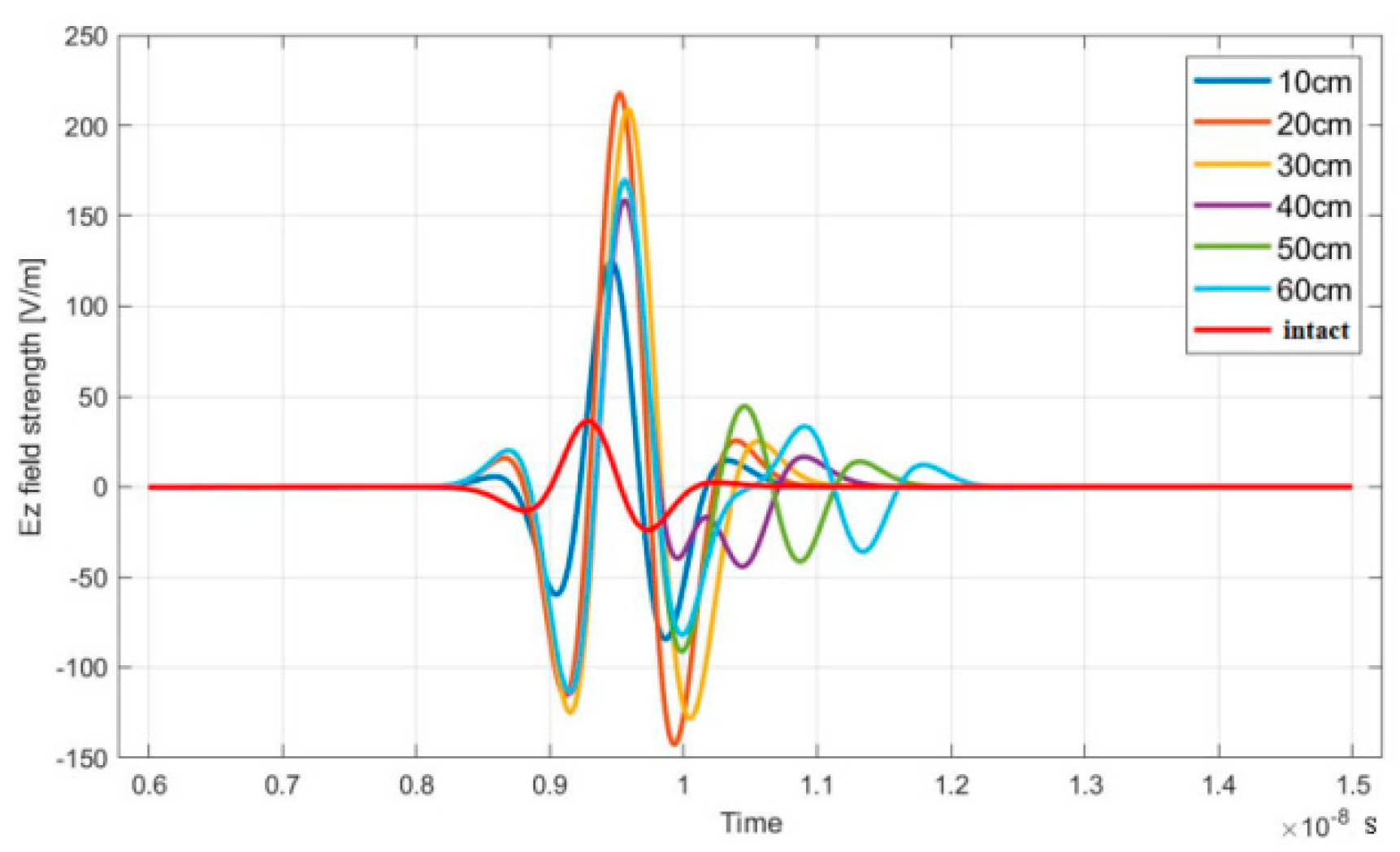
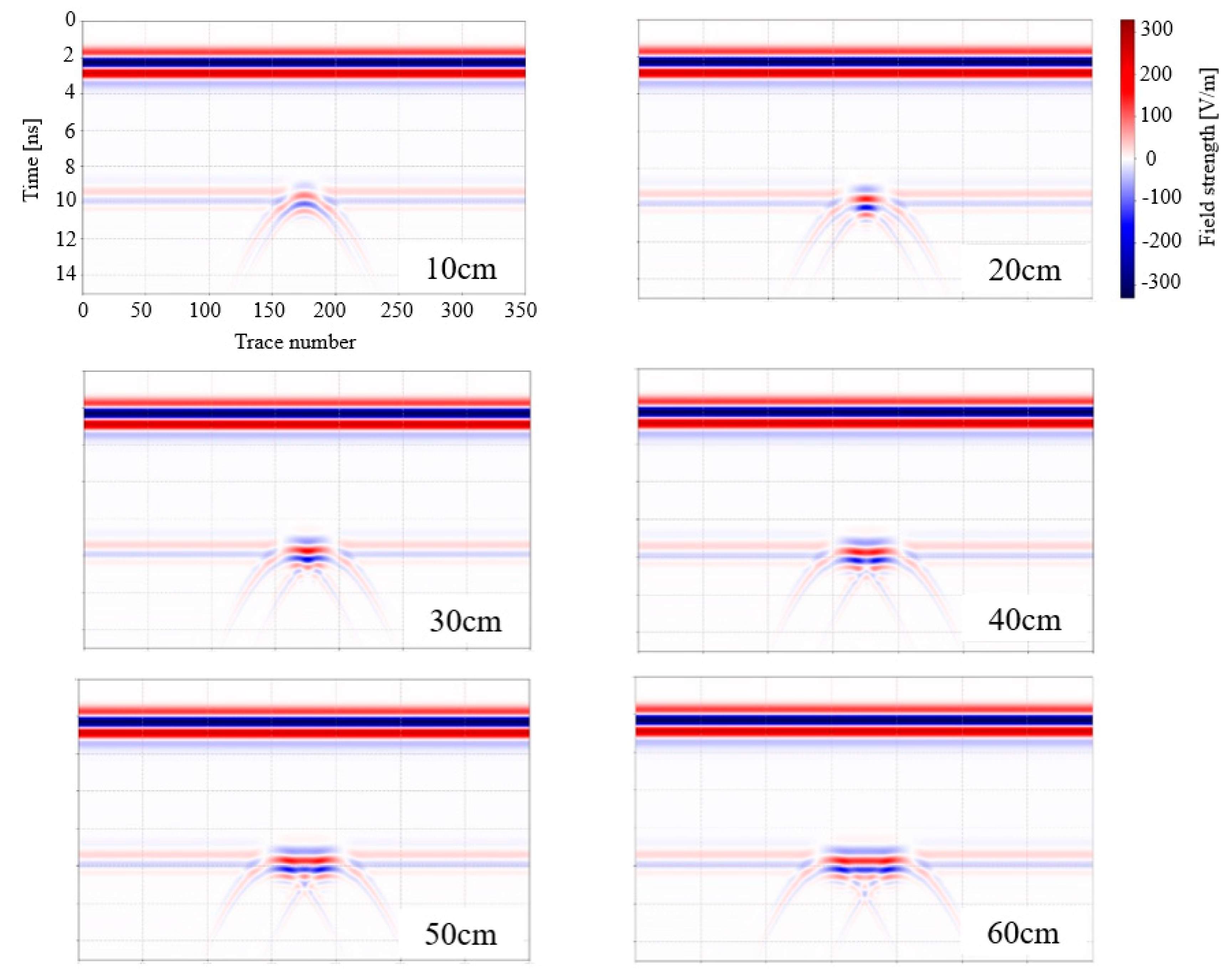
5.3. Analysis of Echo Signal Forms at Different Void Sizes
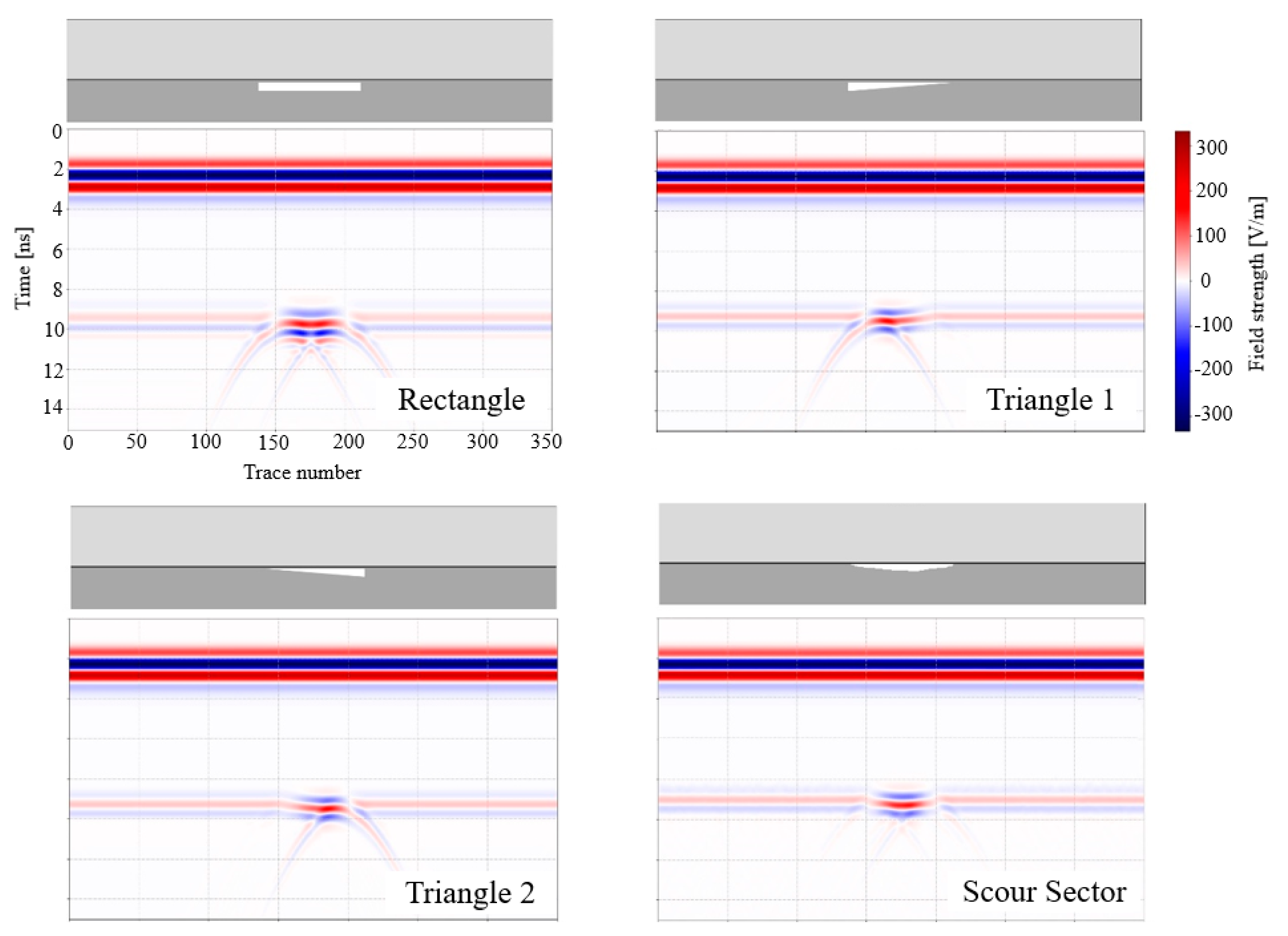
5.4. Analysis of Echo Signal Forms at Different Void Shapes
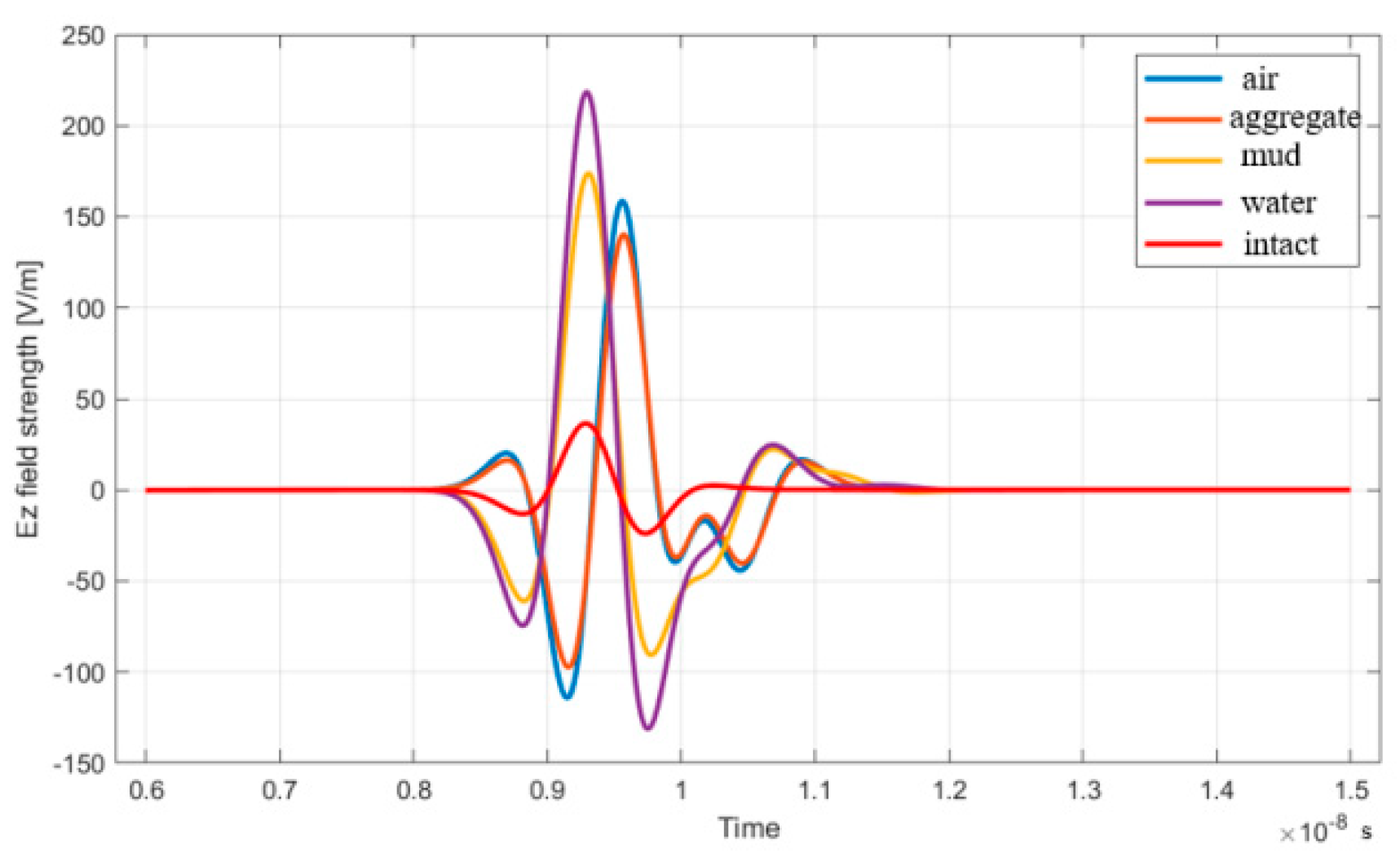
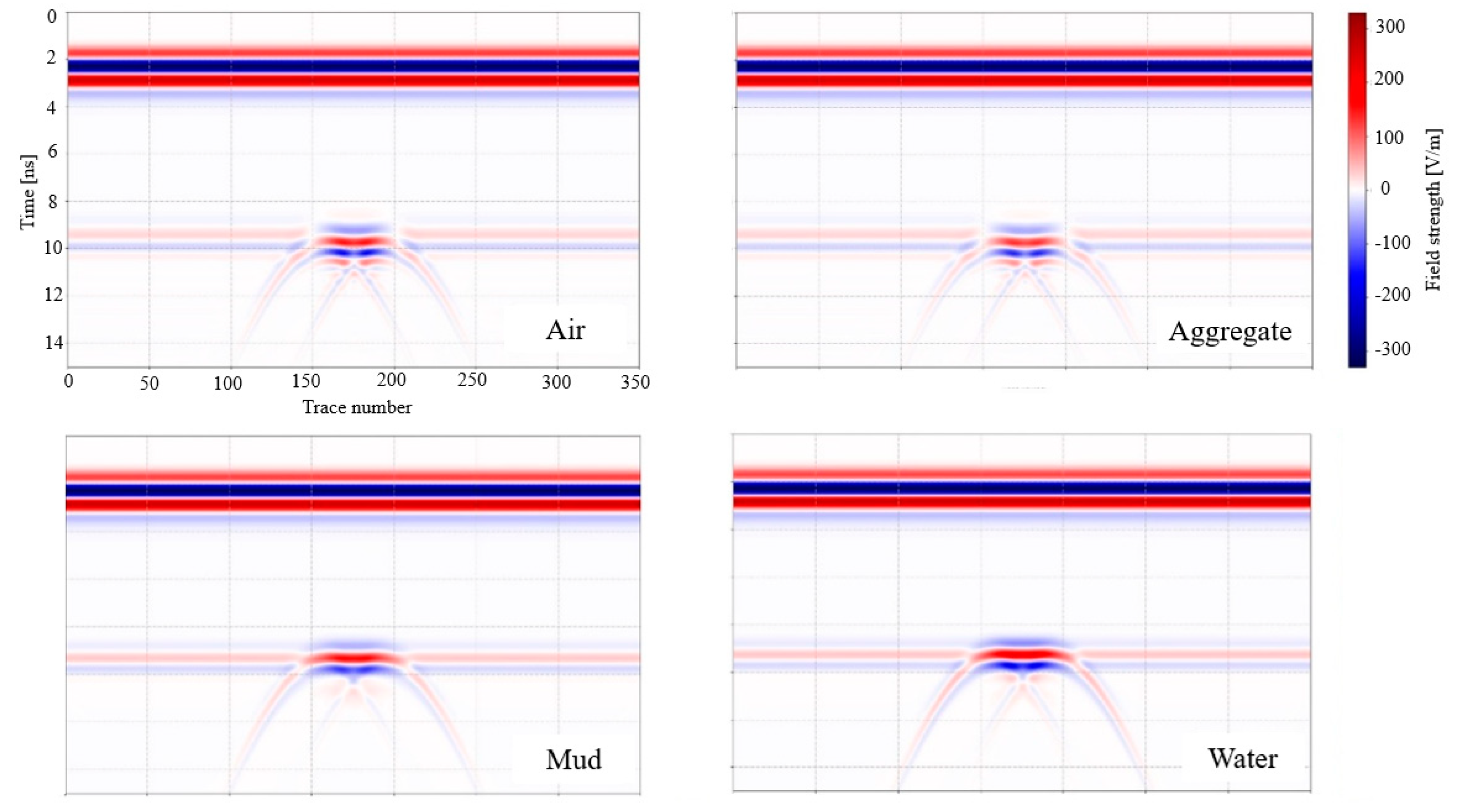
5.5. Analysis of Echo Signal Forms in Different Void-Filling Media
6. Conclusions
- (1)
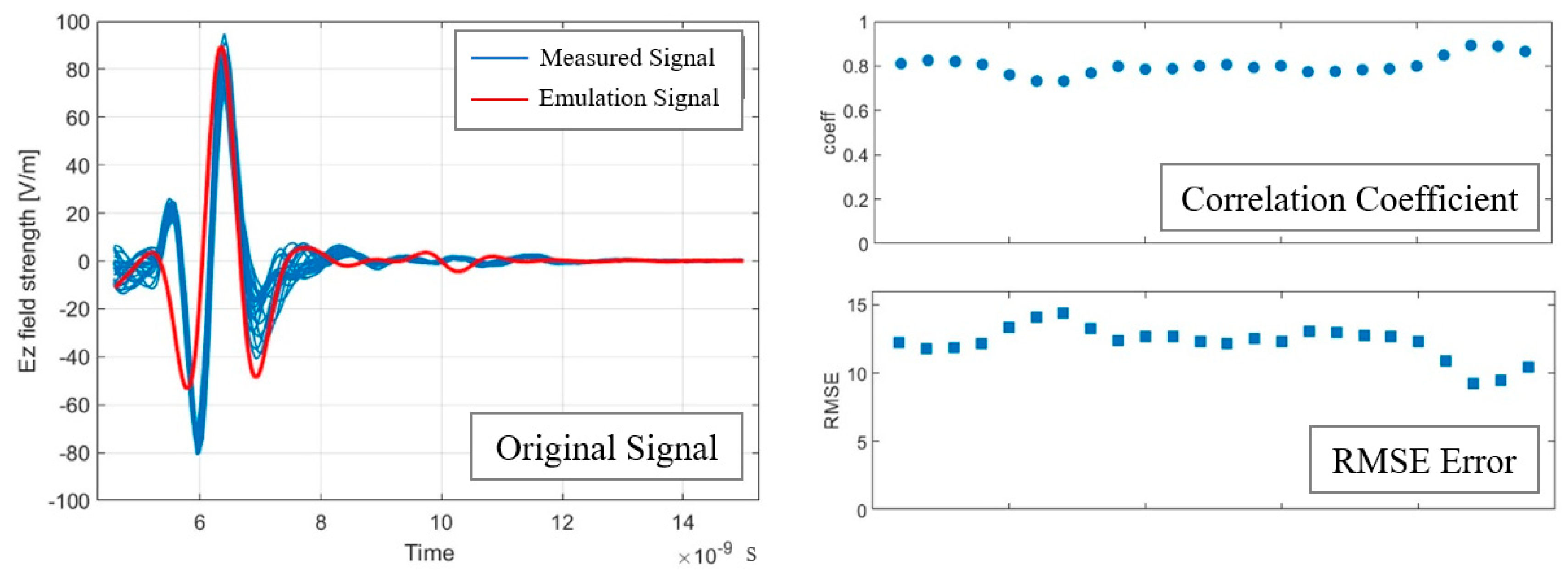
- The parameterization process of constructing the numerical simulation model for ground-penetrating radar under void conditions in cement concrete pavement was achieved by writing input files. By comparing ground-penetrating radar test data from the actual full-scale void test site with the numerical simulation model under void conditions, differences between the simulated signals and the measured signal samples were analyzed. The results showed outstanding performance of the numerical simulation model in signal morphology and root mean square error, and the correlation coefficient is above 0.8, verifying the accuracy and reasonableness of the numerical simulation model;
- (2)
- The analysis explored the impact of various void structures and composition parameters on the echo signal morphology. Clear distinctions were observed between echo signals from intact and void structures. Different void thicknesses and sizes showed minimal differences in signal phase and time delay, with only the amplitude intensity of the A-scan signal and the brightness of the B-scan signal representing the morphologies of different void thicknesses and sizes, but with limited capability to characterize void sizes;
- (3)
- The signal morphologies and cross-sectional maps for the different void shapes were generally consistent, primarily manifesting differences in void thickness at various measurement points. Mud slurry and water, compared to air and loose granular material, exhibited opposing phase characteristics and significant differences in amplitude and time delay due to their different dielectric properties.
7. Research Limitations
- (1)
- Although the amplitude and brightness of the signals can distinguish between different void thicknesses and sizes, the ability to precisely characterize specific dimensions is limited.
- (2)
- Different void shapes, despite having similar echo signal forms, may obscure the potential impacts of subtle shape differences on the signals.
8. Future Prospects
- (1)
- Research and develop more advanced signal processing algorithms or models to improve the accuracy of recognizing void sizes and shapes;
- (2)
- Expand the simulation model to include the composite effects of multiple media to further study the impact of different media combinations on GPR signals.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Lu, H.; Zhao, C.; Yuan, J.; Yin, W.; Wang, Y.; Xiao, R. Study on the Properties and Benefits of a Composite Separator Layer in Airport Cement Concrete Pavement. Buildings 2022, 12, 2190. [Google Scholar] [CrossRef]
- Zhang, Y.; Bao, F.; Tong, Z.; Ma, T.; Zhang, W.G.; Fan, J.W.; Huang, X.M. Radar Response of Heterogeneous Airport Cement Pavement Panel Void. J. Southeast Univ. (Nat. Sci. Ed.) 2023, 53, 137–148. [Google Scholar]
- Tan, Y.; Ling, J.; Yuan, J.; Xu, Z.J. Influence of Voids on Stress in Airport Cement Concrete Pavement. J. Tongji Univ. (Nat. Sci. Ed.) 2010, 38, 552–556+568. [Google Scholar]
- Khudoyarov, S.; Kim, N.; Lee, J.J. Three-dimensional convolutional neural network–based underground object classification using three-dimensional ground penetrating radar data. Struct. Health Monit. 2020, 19, 1884–1893. [Google Scholar] [CrossRef]
- Liu, X.; Dong, X.; Leskovar, D.I. Ground penetrating radar for underground sensing in agriculture: A review. Int. Agrophys. 2016, 30, 533–543. [Google Scholar] [CrossRef]
- Yu, Q.; Li, Y.; Luo, T.; Zhang, J.; Tao, L.; Zhu, X.; Zhang, Y.; Luo, L.; Xu, X. Cement pavement void detection algorithm based on GPR signal and continuous wavelet transform method. Sci. Rep. 2023, 13, 19710. [Google Scholar] [CrossRef]
- Xiao, X.Z.; Li, Q.S. Study of method for identify void beneath cement concrete pavement slabs: A case study of meiguan expressway. J. Highw. Transp. Res. Dev. 2016, 33, 39–45. [Google Scholar]
- Spears, M.; Hedjazi, S.; Taheri, H. An Evaluation of ASTM Standards for Implementation of Ground Penetrating Radar for Pavement and Bridge Deck Evaluations. J. Test. Eval. 2024, 52, 1234–1247. [Google Scholar] [CrossRef]
- Li, C.; Li, X. Ground Penetrating Radar Image Inversion Based on Improved Attention Mechanism. J. Radio Sci. 2023, 38, 825–834. [Google Scholar]
- Qiu, Z.; Zeng, J.; Tang, W.; Yang, H.; Lu, J.; Zhao, Z. Research on Real-Time Automatic Picking of Ground-Penetrating Radar Image Features by Using Machine Learning. Horticulturae 2022, 8, 1116. [Google Scholar] [CrossRef]
- Jiang, H. Research on Detection of Underground Cavity Targets by Ground Penetrating Radar. Master’s Thesis, Institute of Technology, Harbin, China, 2017. [Google Scholar]
- Kang, M.S.; Kim, N.; Lee, J.J.; An, Y.K. Deep learning-based automated underground cavity detection using three-dimensional ground penetrating radar. Struct. Health Monit. 2020, 19, 173–185. [Google Scholar] [CrossRef]
- Bao, Y.W.; Gao, R.X.; Guo, D.; Bai, S.S.; Xin, X.J. Forward Modelling and Detection of GPR in Urban Road Base Disease. Chem. Eng. Trans. 2015, 46, 445–450. [Google Scholar]
- He, B.; Zhang, H. Frequency Dispersion Suppression and Absorbing Boundary Improvement in Geological Radar Forward Modeling. Geol. Explor. 2000, 59–63. [Google Scholar]
- Feng, D.; Dai, Q.; Weng, J. Application of Time Domain Multiresolution Method in Three-Dimensional Ground Penetrating Radar Forward Simulation. J. Cent. South Univ. (Sci. Technol.) 2007, 975–980. [Google Scholar]
- Shu, Z. Research on Detection and Inversion of Tunnel Lining Cavity by Ground Penetrating Radar. Ph.D. Thesis, Chongqing University, Chongqing, China, 2011. [Google Scholar]
- Zhang, J.W.; Liu, B.F.; Li, X.; Zhu, Q.B.; Ren, Y.Q. Fine Detection Method of Underground Pipeline Based on GPRMax2D. Geophys. Geochem. Explor. 2019, 43, 435–440. [Google Scholar]
- Chen, H. Image Recognition of Underground Cavity Targets by Ground Penetrating Radar Based on Machine Learning. Master’s Thesis, Institute of Technology, Harbin, China, 2020. [Google Scholar]
- Liu, Z.; Yeoh, J.K.; Gu, X.; Dong, Q.; Chen, Y.; Wu, W.; Wang, L.; Wang, D. Automatic pixel-level detection of vertical cracks in asphalt pavement based on GPR investigation and improved mask R-CNN. Autom. Constr. 2023, 146, 104689. [Google Scholar] [CrossRef]
- Faize, A.; Lahalal, F.; Atounti, M. Study and simulation of soil salinity evolution by Reflexw and GprMax. Ann. Univ. Craiova-Math. Comput. Sci. Ser. 2019, 46, 426–432. [Google Scholar]
- Wang, Z.L. On the expanded Maxwell’s equations for moving charged media system–General theory, mathematical solutions and applications in TENG. Mater. Today 2022, 52, 348–363. [Google Scholar] [CrossRef]
- Gao, H.; Wen, M. Dynamic Characteristics of Semi-Saturated Viscoelastic Soil-Tunnel Lining System. Eng. Mech. 2013, 30, 90–96. [Google Scholar]
- Liao, H.; Xu, Z.; Zeng, X.J.; Merigó, J.M. Qualitative decision making with correlation coefficients of hesitant fuzzy linguistic term sets. Knowl.-Based Syst. 2015, 76, 127–138. [Google Scholar] [CrossRef]
- Karunasingha, D.S.K. Root mean square error or mean absolute error? Use their ratio as well. Inf. Sci. 2022, 585, 609–629. [Google Scholar] [CrossRef]
- Zeng, B.; Liu, S.; Yang, J.; Feng, D.S.; Yuan, Z.M.; Liu, J.; Wang, X. Influence of Surface Undulation on Underground Pipeline GPR Detection. Geophys. Geochem. Explor. 2023, 47, 1064–1070. [Google Scholar]
- Liu, H.; Shi, Z.; Li, J.; Liu, C.; Meng, X.; Du, Y.; Chen, J. Detection of road cavities in urban cities by 3D ground-penetrating radar. Geophysics 2021, 86, WA25–WA33. [Google Scholar] [CrossRef]
- Xie, Y.Y.; Liao, H.J.; Zan, Y.W. Two-dimensional forward simulation of railway subgrade disease detection by ground penetrating radar. J. Zhejiang Univ. (Eng. Technol.) 2010, 44, 1907–1911. [Google Scholar]
- Schlaich, A.; Knapp, E.W.; Netz, R.R. Water dielectric effects in planar confinement. Phys. Rev. Lett. 2016, 117, 048001. [Google Scholar] [CrossRef]
- Lu, D.; Huo, Y.; Jiang, Z.; Zhong, J. Carbon nanotube polymer nanocomposites coated aggregate enabled highly conductive concrete for structural health monitoring. Carbon 2023, 206, 340–350. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Layer | Material | Thickness | Relative Dielectric Constant | Electrical Conductivity |
|---|---|---|---|---|
| Air Layer | Air | 20 cm | 1 | 0 |
| Surface | Cement Concrete | 40 cm | 8 | 0.005 |
| Base | Cement-Stabilized Crushed Stone | 30 cm | 12 | 0.05 |
| Parameter Type | Model Signal Parameters |
|---|---|
| Excitation Source | Ricker Signal |
| Center Frequency | 800 MHz |
| Tx-Rx Antenna Spacing | 10 cm |
| Time Window | 15 ns |
| Step Size | 1 cm |
| Parameter Type | Model Signal Parameters |
|---|---|
| Spatial Range | 4 m ∗ 0.9 m |
| Boundary Condition | PML |
| Spatial Step | 0.002 m |
| Filling Medium | Relative Permittivity | Electrical Conductivity | Simulation Scene |
|---|---|---|---|
| Air | 1 | 0 | Complete void condition |
| Loose fine | 2 | 0.01 | Inter-layer non-compaction, degradation of panel bottom support |
| Mud slurry | 40 | 2 | Seepage and mud flushing after joint damage |
| Water | 81 | 5 | Rainy conditions with water pooling between layers |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yuan, J.; Jiao, H.; Wu, B.; Liu, F.; Li, W.; Du, H.; Li, J. Study of Void Detection Beneath Concrete Pavement Panels through Numerical Simulation. Buildings 2024, 14, 1956. https://doi.org/10.3390/buildings14071956
Yuan J, Jiao H, Wu B, Liu F, Li W, Du H, Li J. Study of Void Detection Beneath Concrete Pavement Panels through Numerical Simulation. Buildings. 2024; 14(7):1956. https://doi.org/10.3390/buildings14071956
Chicago/Turabian StyleYuan, Jie, Huacheng Jiao, Biao Wu, Fei Liu, Wenhao Li, Hao Du, and Jie Li. 2024. "Study of Void Detection Beneath Concrete Pavement Panels through Numerical Simulation" Buildings 14, no. 7: 1956. https://doi.org/10.3390/buildings14071956