
Study on the Vibration Isolation Performance of Sliding–Rolling Friction Composite Vibration Isolation Bearing

Abstract
:1. Introduction
2. Establishment of Structural Dynamic Equations
2.1. Relative Stationarity
2.2. Relative State of Motion
3. ABAQUS Finite Element Analysis of Seismic Isolation Bearings
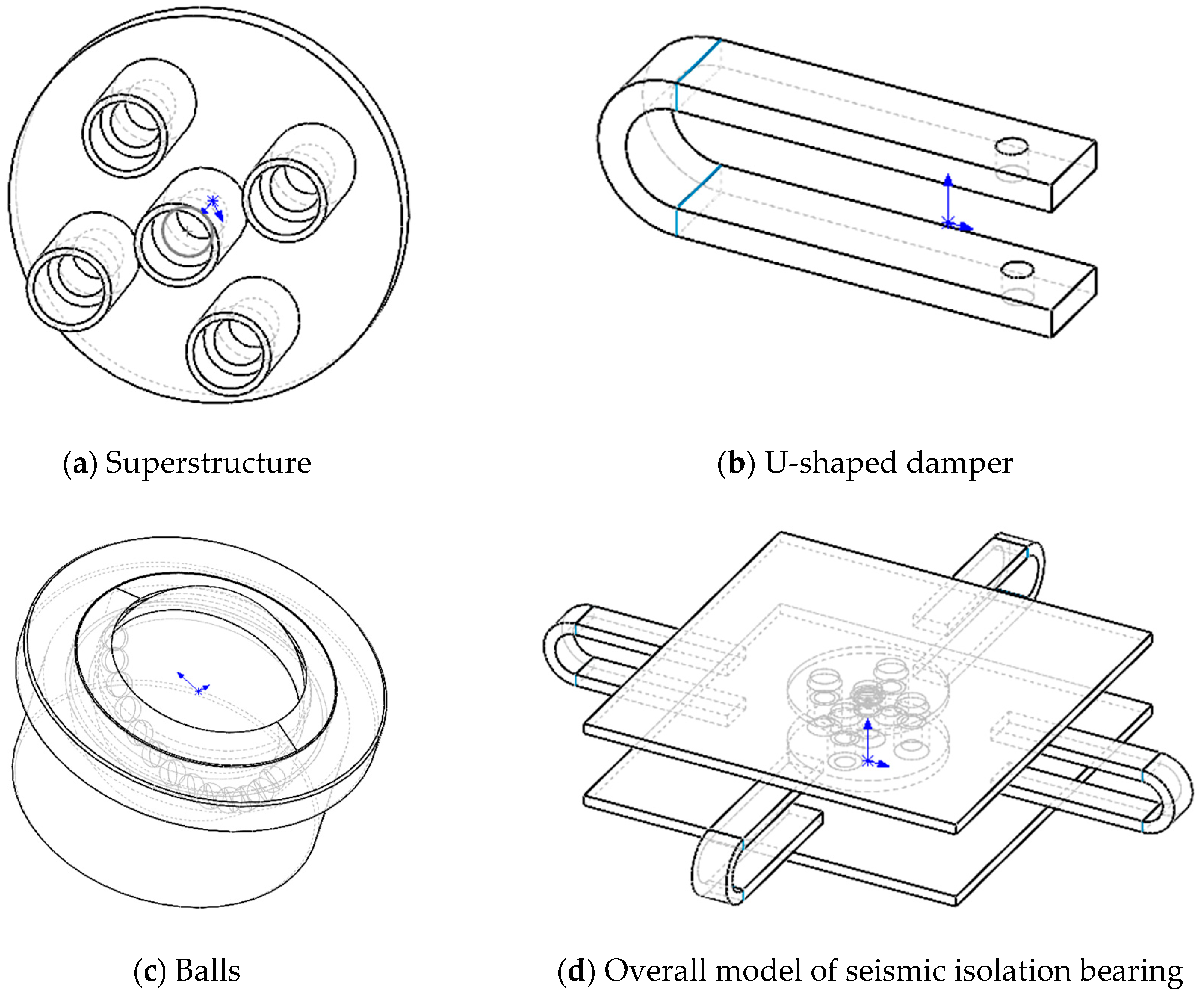
3.1. Support Structure
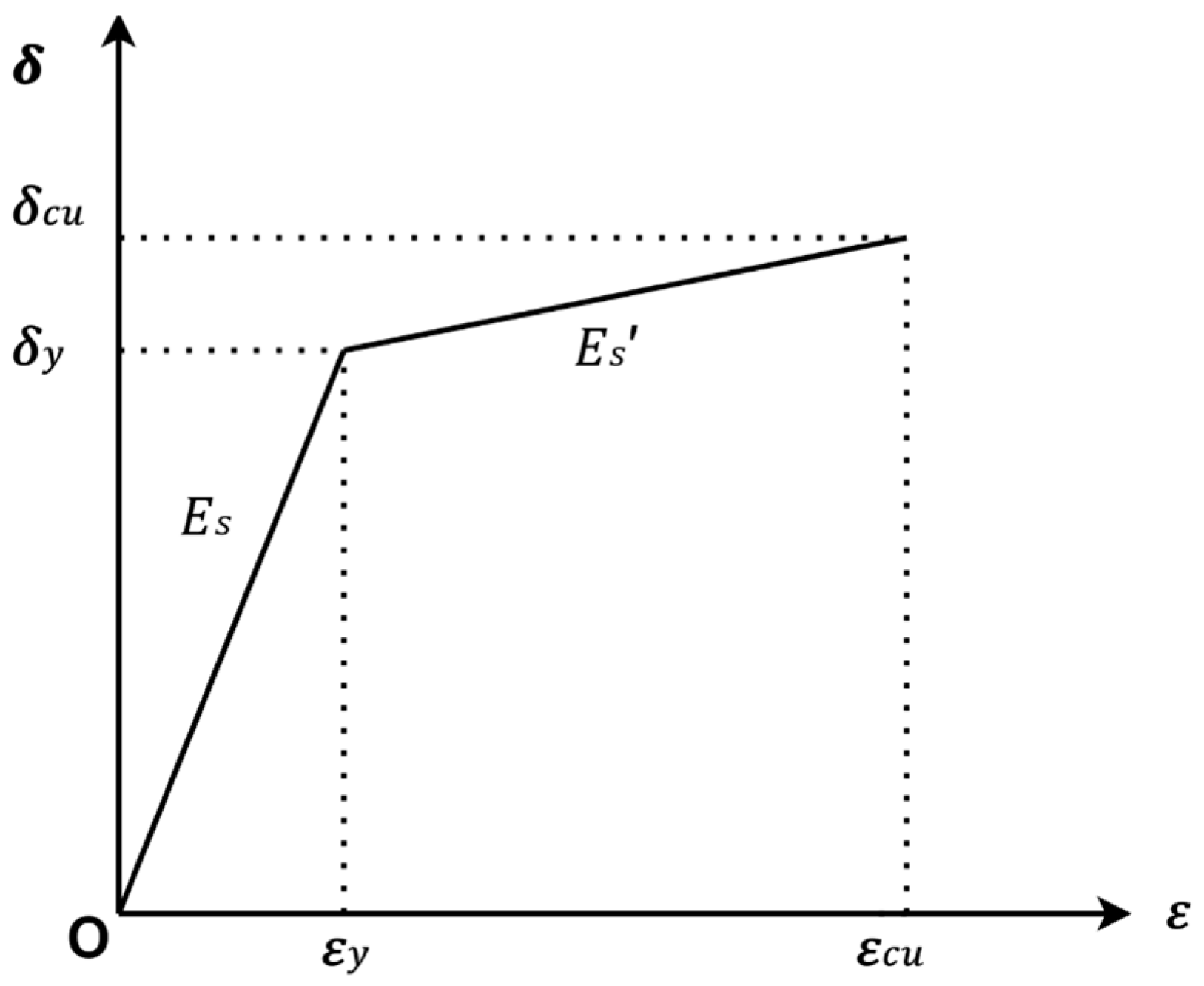
3.2. Material Intrinsic Relationship
3.3. Model Simplification Processing
3.4. Definition of Exposure
3.5. Boundary Conditions and Load Step Treatment
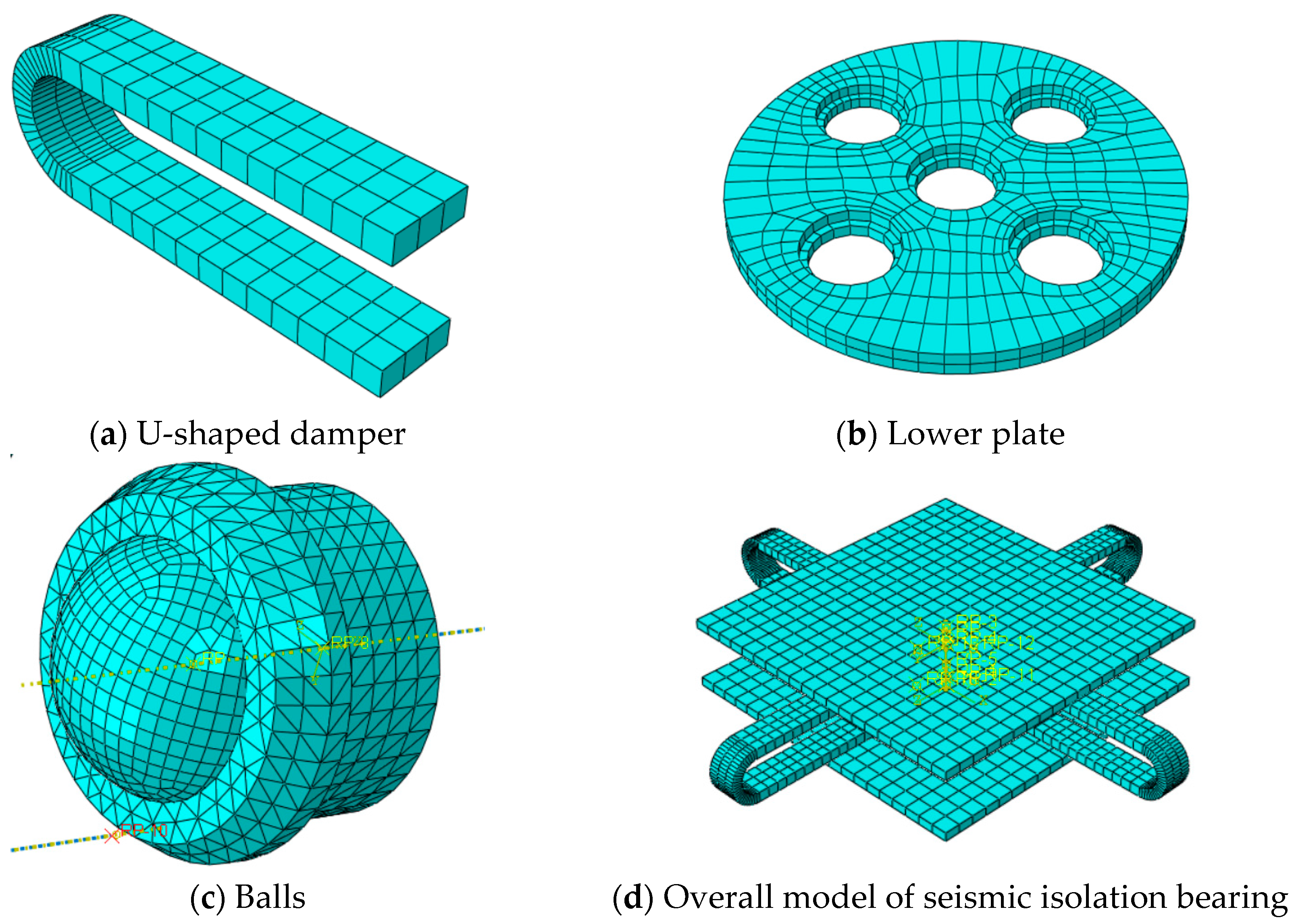
3.6. Grid Division
4. Hysteresis Curve Analysis of Sliding–Rolling Friction Composite Seismic Isolation Bearings
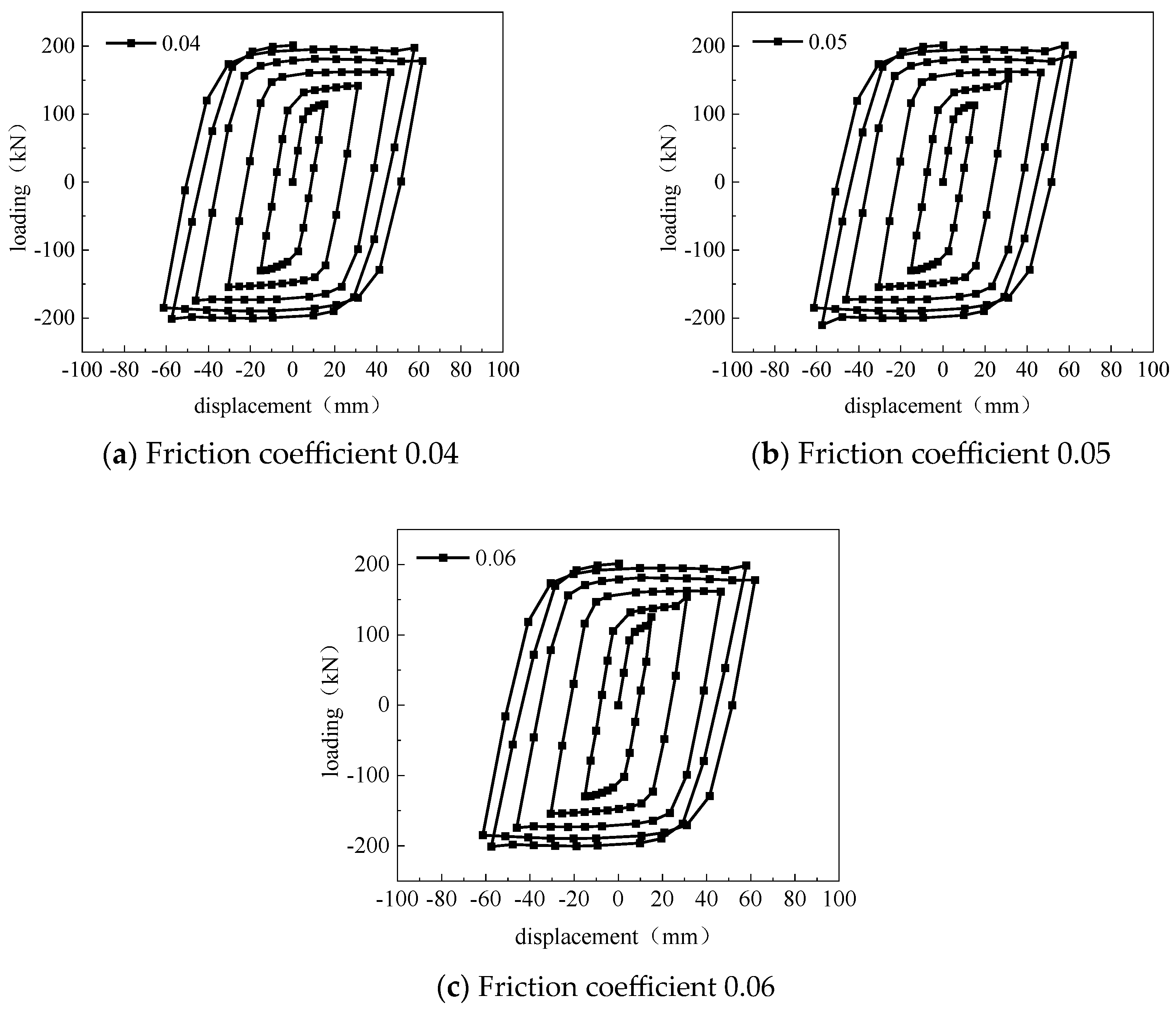
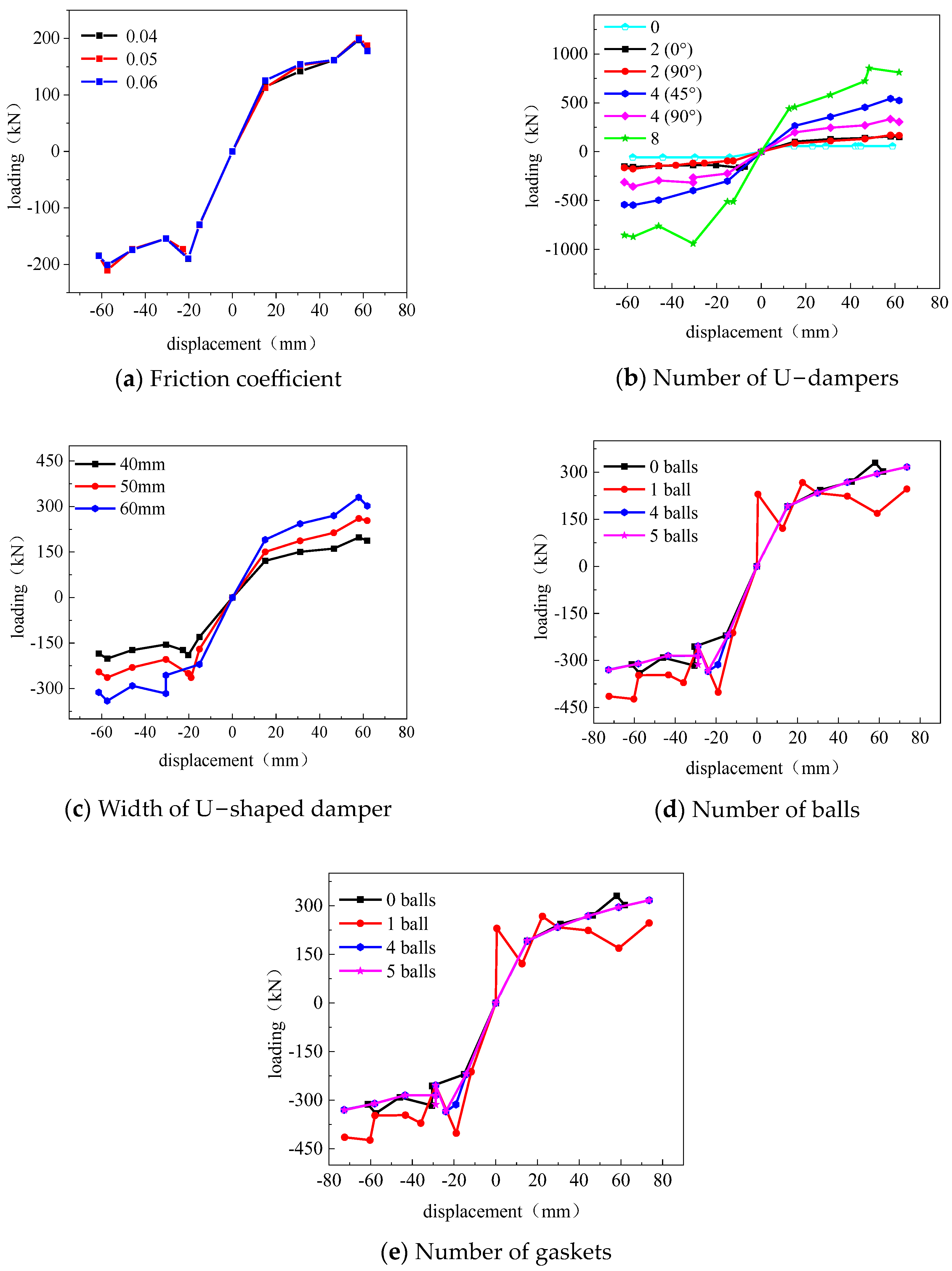
4.1. Effect of Friction Coefficient on Hysteresis Curve
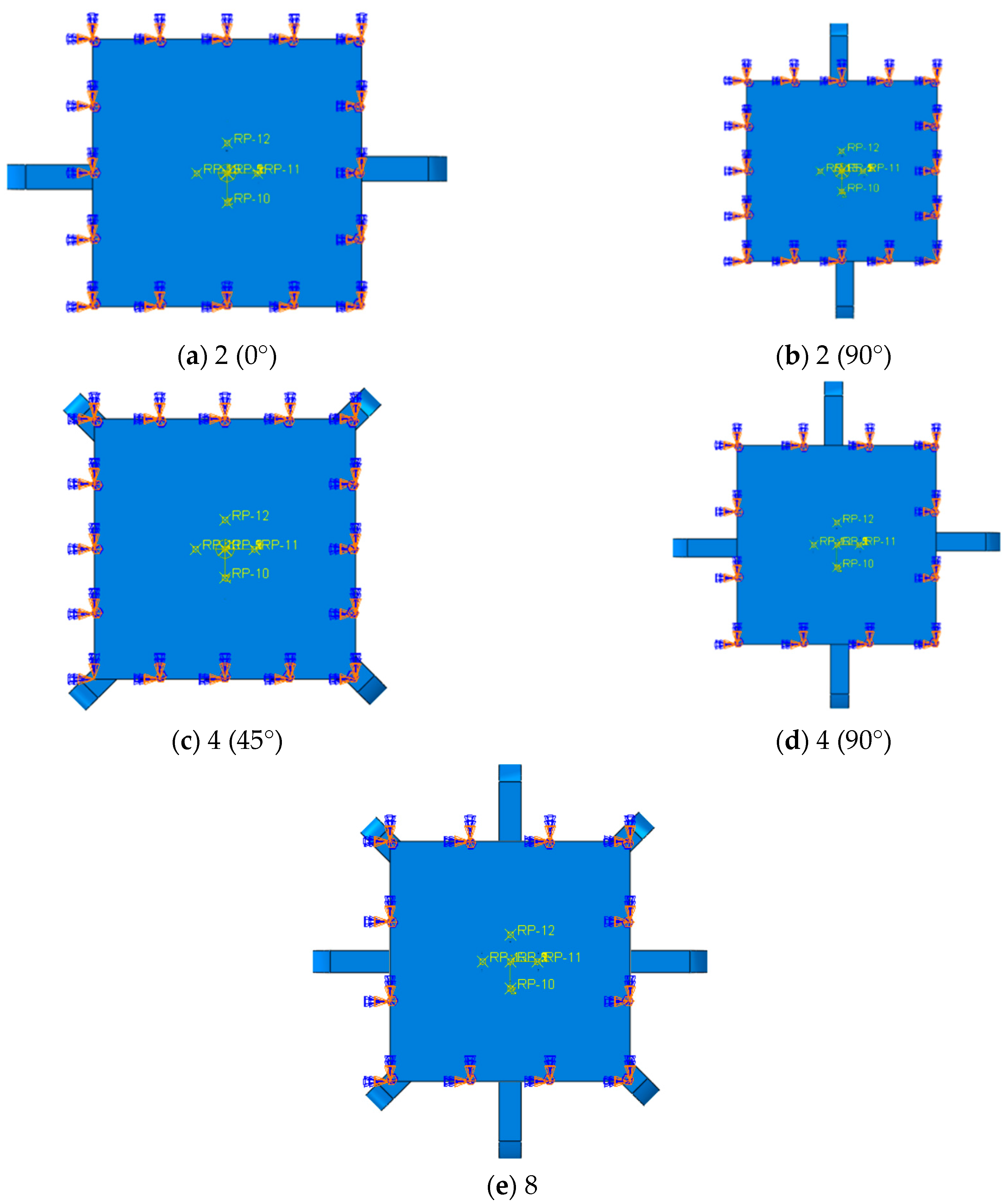
4.2. Effect of the Number of U-Dampers on the Hysteresis Curve
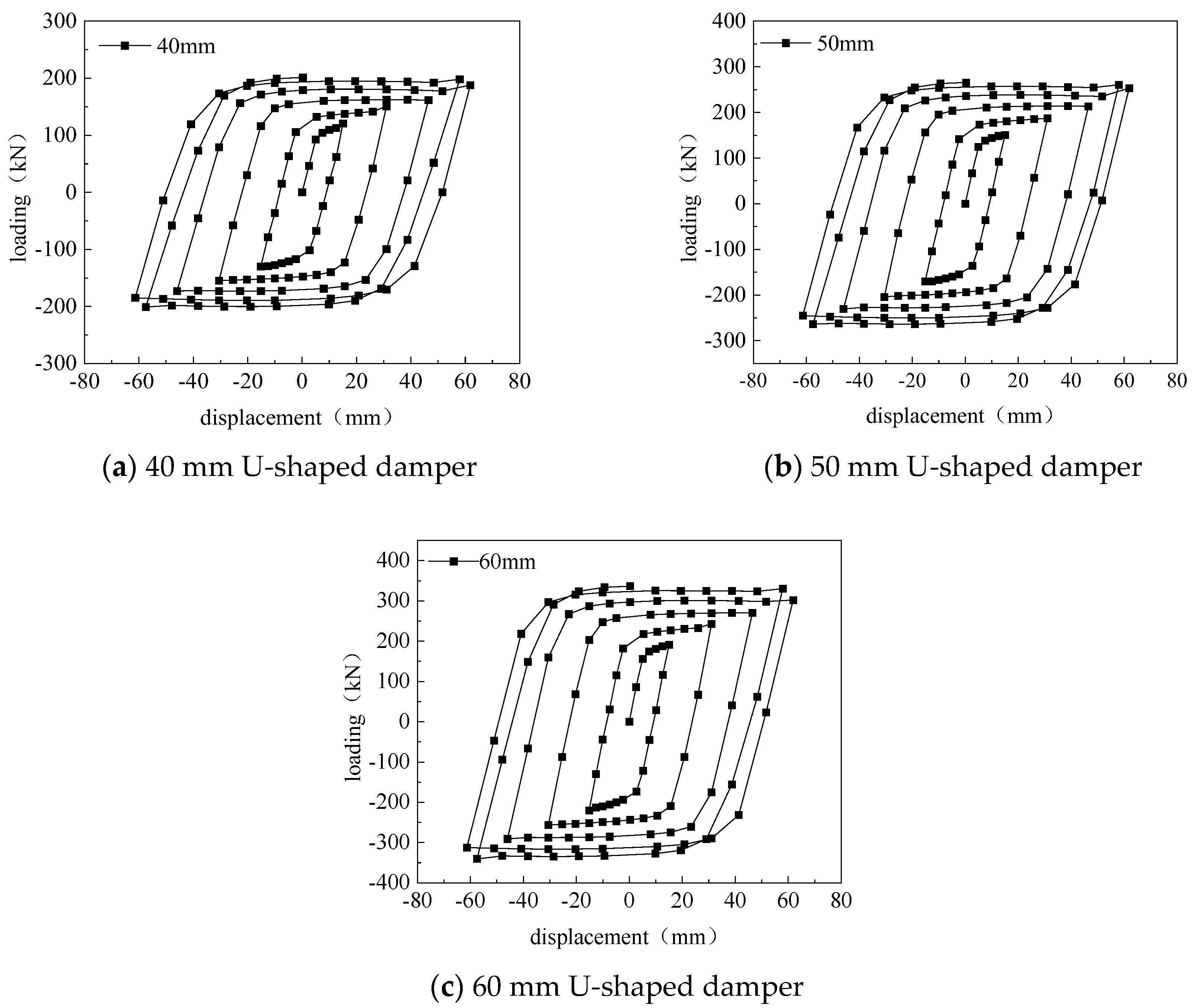
4.3. Effect of U-Damper Width on Hysteresis Curve
4.4. Effect of Number of Balls on Hysteresis Curve
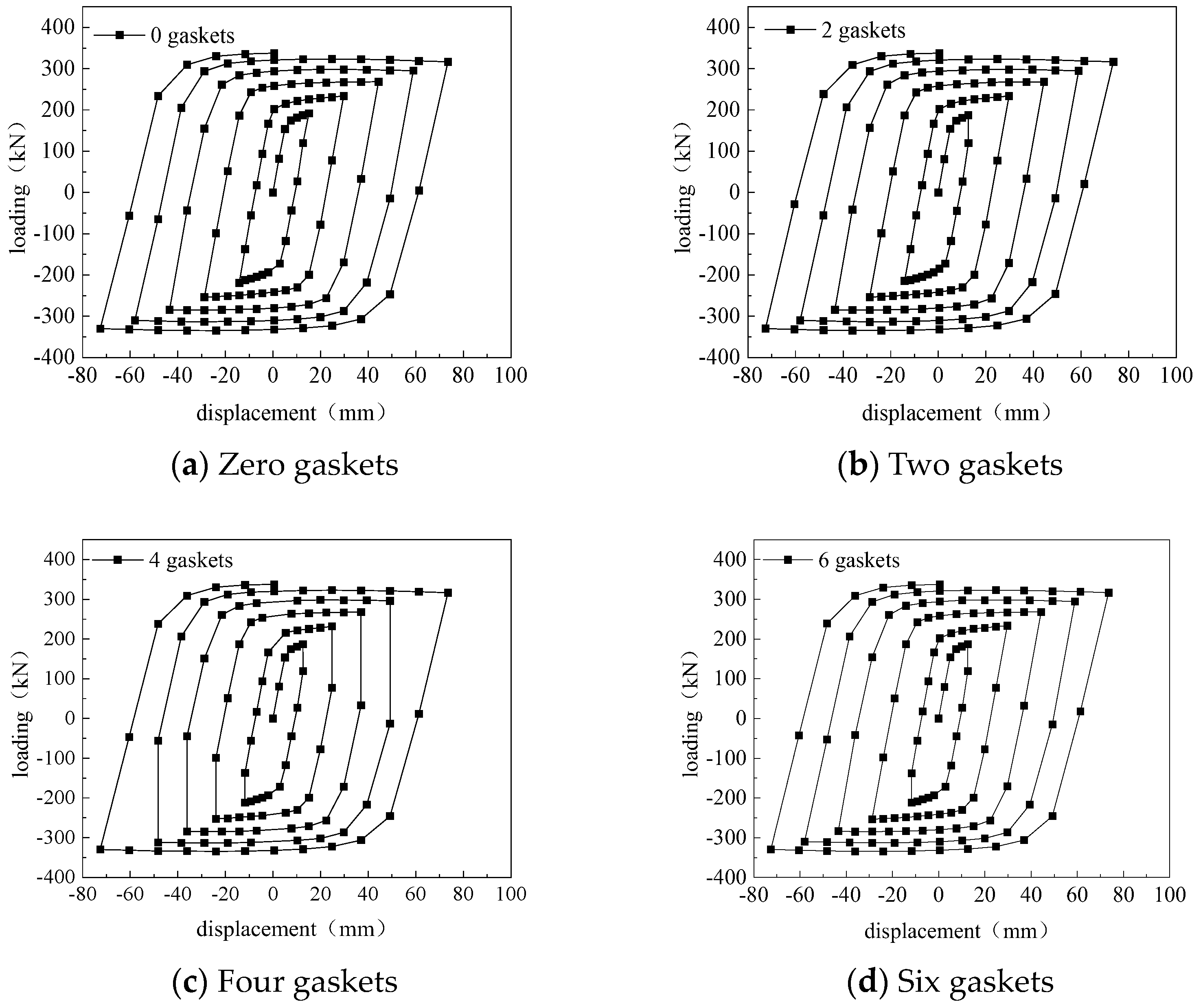
4.5. Effect of Number of Shims on Hysteresis Curve
5. Skeleton Curve Analysis of Sliding–Rolling Friction Composite Seismic Isolation Bearings
5.1. Analysis Curves for Different Parts of the Skeleton
5.2. Analysis of the Characteristic Parameters of the Skeleton Curve
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Lin, X. Seismic Performance Analysis of Frame Structures Using Seismic Isolation Technology. Master’s Thesis, Southeast University, Nanjing, China, 2019. [Google Scholar]
- Liu, W.; Zhou, F.; Zhong, X.; Bai, Y. Study on various related properties and long-term performance of lead-core laminated rubber seismic isolation pads. J. South China Constr. Inst. 1999, 12–20. [Google Scholar]
- Yang, L.; Liu, Y.; Chang, Y.; Cheng, C.; Sun, F. Global patent analysis of seismic isolation bearing technology. Eng. Seism. Reinf. Retrofit. 2018, 40, 7–12. [Google Scholar]
- Yang, L.; Sun, F.; Chang, Y.; Cheng, C. Study on the patent status of building seismic isolation bearing in China. Eng. Seism. Reinf. Retrofit. 2018, 40, 1–6. [Google Scholar]
- Li, J. Comparison of Seismic Response Analysis of Frame Structures with Different Isolation Schemes. Master’s Thesis, Shandong University of Architecture, Jinan, China, 2020. [Google Scholar]
- Jin, J.; Huang, X.; Zhong, X.; Shen, Z. Study on the value of stiffness before yielding of lead core rubber bearing (LRB) in seismic isolation design. J. Guangzhou Univ. (Nat. Sci. Ed.) 2006, 63–67. [Google Scholar]
- Wang, B.; Tan, P.; Xu, K.; Zhou, F.; Ning, L. Experimental study on mechanical properties of new fiber reinforced engineering plastic plate sandwich rubber isolation bearing. J. Civ. Eng. 2012, 45, 187–191. [Google Scholar]
- Zayas, V.A.; Low, S.S.; Mahin, S.A. A Simple Pendulum Technique for Achieving Seismic Isolation. Earthq. Spectra 1990, 6, 317–333. [Google Scholar] [CrossRef]
- Quaglini, V.; Gandelli, E.; Dubini, P. Experimental investigation of the re-centring capability of curved surface sliders. Struct. Control. Health Monit. 2017, 24, e1870. [Google Scholar] [CrossRef]
- Fenz, D.M.; Constantinou, M.C. Behaviour of the double concave Friction Pendulum bearing. Earthq. Eng. Struct. Dyn. 2006, 35, 1403–1424. [Google Scholar] [CrossRef]
- Wang, Q.T. Analysis of Vibration Damping Performance of Lead-Core Steel Pipe Seismic Isolation Bearing with Stiffening Ring. Master’s Thesis, Jilin University of Architecture, Changchun, China, 2022. [Google Scholar]
- Harvey, P.S.; Wiebe, R.; Gavin, H.P. On the chaotic response of a nonlinear rolling isolation system. Phys. D Nonlinear Phenom. 2013, 256–257, 36–42. [Google Scholar] [CrossRef]
- Zhang, J.; Jia, J. Research on the seismic isolation effect of the ring spring–friction pendulum bearing in the dakai underground subway station. Appl. Sci. 2023, 13, 7093. [Google Scholar] [CrossRef]
- Sheng, T.; Liu, G.B.; Bian, X.C.; Shi, W.X.; Chen, Y. Development of a three-directional vibration isolator for buildings subject to metro and earthquake-induced vibrations. Eng. Struct. 2022, 252, 113576. [Google Scholar] [CrossRef]
- Han, J.; Guo, Z.; Li, M.; Li, L.; Hou, B.; Du, X. Nonlinear seismic response of free-field soil under longitudinal non-uniform seismic excitations. Rock Soil Mech. 2019, 40, 2581–2592. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Makings | Modulus of Elasticity (MPa) | Poisson’s Ratio | Yield Stress (N/mm2) | Mass Density (kg/m3) |
|---|---|---|---|---|
| 45#steel | 2.11 × 1011 | 0.269 | 430 | 7890 |
| 65 Mn | 2.09 × 1011 | 0.288 | 355 | 7820 |
| GCr15 | 2.06 × 1011 | 0.3 | 1800 | 7810 |
| PTFE | 2.8 × 1011 | 0.35 | 0 | 2320 |
| Q345 | 2.11 × 1011 | 0.3 | 345 | 7890 |
| Coefficient of Friction | Hysteresis Loop Area (J) | Maximum Value of Displacement in the Cycle (mm) | Maximum Value of the Load during the Cycle (kN) | Equivalent Damping Ratio |
|---|---|---|---|---|
| 0.04 | 32,114 | 61.86 | 201.34 | 0.411 |
| 0.05 | 32,060.9 | 61.85 | 201.29 | 0.41 |
| 0.06 | 32,020 | 61.86 | 201.45 | 0.409 |
| Number of Dampers | Hysteresis Loop Area (J) | Maximum Value of Displacement in the Cycle (mm) | Maximum Value of the Load during the Cycle (KN) | Equivalent Damping Ratio |
|---|---|---|---|---|
| 0 | 10,019.85 | 58.852 | 61.110 | 0.404 |
| 2 (0°) | 25,887.50 | 61.871 | 164.545 | 0.405 |
| 2 (90°) | 28,606.36 | 61.872 | 172.237 | 0.427 |
| 4 (45°) | 96,009.74 | 61.840 | 543.278 | 0.455 |
| 4 (90°) | 54,508.73 | 61.840 | 336.369 | 0.417 |
| 8 | 150,495.98 | 61.808 | 855.845 | 0.453 |
| Damper Width (mm) | Hysteresis Loop Area (J) | Maximum Value of Displacement in the Cycle (mm) | Maximum Value of the Load during the Cycle (KN) | Equivalent Damping Ratio |
|---|---|---|---|---|
| 40 | 32,060.9 | 61.853 | 201.289 | 0.41 |
| 50 | 43,370.7 | 61.853 | 265.743 | 0.42 |
| 60 | 54,508.7 | 61.84 | 336.369 | 0.417 |
| Number of Balls | Hysteresis Loop Area (J) | Maximum Value of Displacement in the Cycle (mm) | Maximum Value of the Load during the Cycle (KN) | Equivalent Damping Ratio |
|---|---|---|---|---|
| 0 | 51,284.7 | 61.84 | 304.69 | 0.39 |
| 1 | 55,499.6 | 73.57 | 266.942 | 0.45 |
| 4 | 72,567.1 | 73.62 | 336.48 | 0.47 |
| 5 | 72,900.1 | 73.62 | 337.794 | 0.47 |
| Number of Gaskets | Hysteresis Loop Area (J) | Maximum Value of Displacement in the Cycle (mm) | Maximum Value of the Load during the Cycle (kN) | Equivalent Damping Ratio |
|---|---|---|---|---|
| 0 | 72,900.1 | 73.6209 | 307.794 | 0.467 |
| 2 | 76,806.7 | 73.5153 | 338.599 | 0.493 |
| 4 | 76,648.5 | 73.5101 | 337.618 | 0.492 |
| 6 | 76,632.2 | 73.5146 | 337.44 | 0.492 |
| Number of U-Dampers | Yield Load (kN) | Ultimate Load (kN) | Yield Displacement (mm) | Limit Displacement (mm) | Ductility Factor |
|---|---|---|---|---|---|
| 0 | 56.81 | 61.11 | 14.18 | 58.87 | 2.06 |
| 2 (0°) | 103.33 | 134.21 | 15.04 | 46.48 | 2.73 |
| 2 (90°) | 85.78 | 144.3 | 15.04 | 51.54 | 3.68 |
| 4 (45°) | 264.54 | 461.8 | 16.33 | 47.5 | 3.05 |
| 4 (90°) | 197.8 | 284.48 | 15.03 | 47.03 | 3.17 |
| 4 (45°) | 440.47 | 727.47 | 15.02 | 46.49 | 3.33 |
| Width of U-Dampers | Yield Load (kN) | Ultimate Load (kN) | Yield Displacement (mm) | Limit Displacement (mm) | Ductility Factor |
|---|---|---|---|---|---|
| 40 | 120.93 | 168.38 | 15.03 | 47.04 | 3.08 |
| 50 | 150.48 | 221.49 | 15.03 | 46.92 | 3.07 |
| 60 | 197.80 | 284.48 | 15.03 | 47.03 | 3.17 |
| Number of Balls | Yield Load (kN) | Ultimate Load (kN) | Yield Displacement (mm) | Limit Displacement (mm) | Ductility Factor |
|---|---|---|---|---|---|
| 0 | 197.80 | 284.48 | 15.03 | 47.03 | 3.17 |
| 1 | 120.88 | 209.49 | 12.63 | 43.56 | 4.16 |
| 4 | 190.83 | 269.25 | 15.07 | 44.35 | 3.00 |
| 5 | 192.04 | 269.31 | 15.07 | 44.41 | 3.00 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, Y.; Li, J.; Liu, B.; Chen, J.; Zhang, W.; Meng, Q. Study on the Vibration Isolation Performance of Sliding–Rolling Friction Composite Vibration Isolation Bearing. Buildings 2024, 14, 2053. https://doi.org/10.3390/buildings14072053
Lu Y, Li J, Liu B, Chen J, Zhang W, Meng Q. Study on the Vibration Isolation Performance of Sliding–Rolling Friction Composite Vibration Isolation Bearing. Buildings. 2024; 14(7):2053. https://doi.org/10.3390/buildings14072053
Chicago/Turabian StyleLu, Yankai, Jiayue Li, Bo Liu, Juannong Chen, Wanying Zhang, and Qingjuan Meng. 2024. "Study on the Vibration Isolation Performance of Sliding–Rolling Friction Composite Vibration Isolation Bearing" Buildings 14, no. 7: 2053. https://doi.org/10.3390/buildings14072053