1. Introduction
Electric vehicles (EVs), as a promising way to reduce the greenhouse effect and alleviate the problem of climate change, have been extensively studied [
1]. As a key component of EVs, the drive system has a direct impact on the energy efficiency of EVs. Therefore, it is extremely important to improve the efficiency of the drive system while satisfying vehicle performance standards [
2].
Studies have demonstrated that integrating a multi-speed gearbox into the drive system can effectively help to utilize the high-efficiency range, improve motor efficiency, and reduce energy consumption [
3,
4]. Continuously variable transmission (CVT), and dual-clutch transmission (DCT) have multiple gears, but they have complex structures and high manufacturing costs [
5,
6]. By contrast, automatic mechanical transmission (AMT) has a simple structure, low manufacturing cost, and high transmission efficiency [
7,
8]. Owing to the working characteristics of the motor, EVs do not need many gears. Therefore, a two-speed AMT can serve as an economical and effective solution to improve the efficiency of the EV drive system. In [
9], a novel two-speed planetary AMT (PAMT) was proposed, which used a synchronizer and a brake band to achieve two-gear switching. In [
10], a two-speed uninterrupted mechanical transmission (UMT) composed of a planetary gear set, brake belt, and centrifugal clutch that realized seamless switching between two gears was proposed. In [
11], a fork-less two-speed AMT (I-AMT) with a dry clutch was proposed, without torque interruption during gear shifting.
In addition, to shorten the distance of the transmission chain, reduce the energy loss of the transmission joint, and further improve the efficiency of the drive system, various scholars and manufacturers have conducted extensive research on distributed in-wheel drive systems [
12,
13]. Protean proposed the concept of integrating the motor and brake and connecting the motor directly to drive the wheels [
14]. Schaeffler developed the E-Wheel Drive system by further integrating the drive motor, electrical equipment, and braking and cooling systems [
15]. However, the use of in-wheel motors significantly increases the unsprung mass of a vehicle, which degrades vehicle handling and ride quality. Moreover, an in-wheel motor is less efficient when the vehicle is operated under diverse conditions. By installing a miniaturized high-speed motor in the wheel to match a two-speed transmission drive scheme, the work efficiency of the motor can increase, and EV performance can be improved. In [
16], a wheel-mounted two-speed configuration composed of two independent high-speed motors and two planetary gear sets was introduced. It was possible to smoothly switch between the two gears. NSK Ltd. optimized the above structure and successfully manufactured a test vehicle [
17]. However, the problem of additional unsprung mass due to the dual-motor design was not effectively solved. In [
18], a new configuration composed of one motor and an electromechanical shift actuator to achieve two gears in the wheel was proposed. This configuration effectively reduced the unsprung mass and improved system reliability.
Furthermore, to develop an efficient and compact drive system, a new clutch solution is needed [
19]. With the advancement of mechatronics technology, a variety of new actuators are being used in drive systems to improve transmission efficiency [
20]. General Motors has replaced the original one-way clutch (OWC) and low/reverse friction clutch with a selectable one-way clutch (SOWC) in its GF9 gearbox product series to avoid the use of friction clutches, reduce weight and cost, and improve transmission efficiency [
21]. The SOWC has higher efficiency and torque density compared to the OWC, and it requires less packaging space [
22]. Moreover, Ford and Honda have used the SOWC in their AT applications owing to its compact dimensions and high-efficiency [
23,
24]. In addition, Means Industry has introduced a new type of static SOWC for use in hybrid power systems to improve transmission efficiency [
25]. It allows for the controllable locking of two independent components and performs motor actions to achieve precise synchronization.
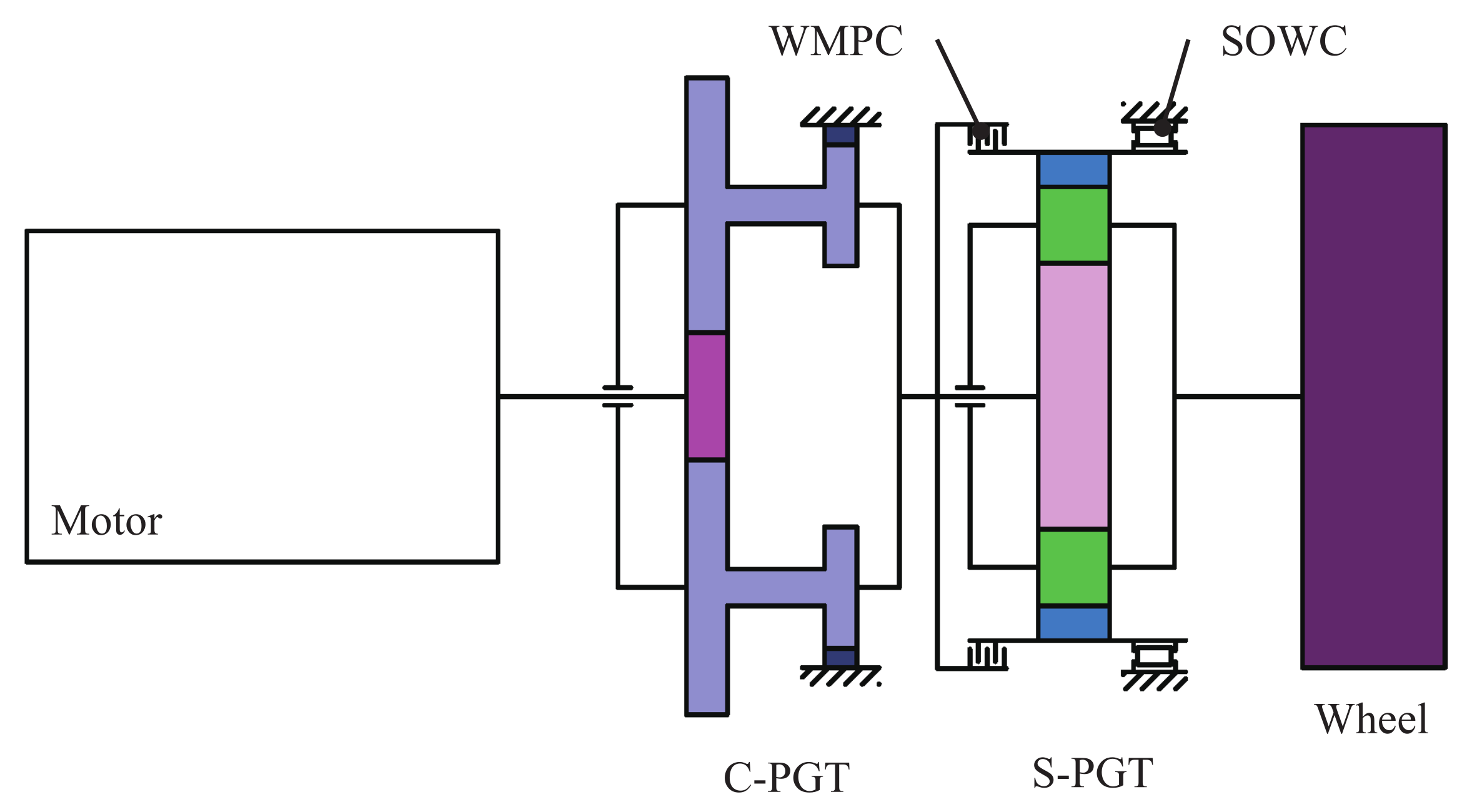
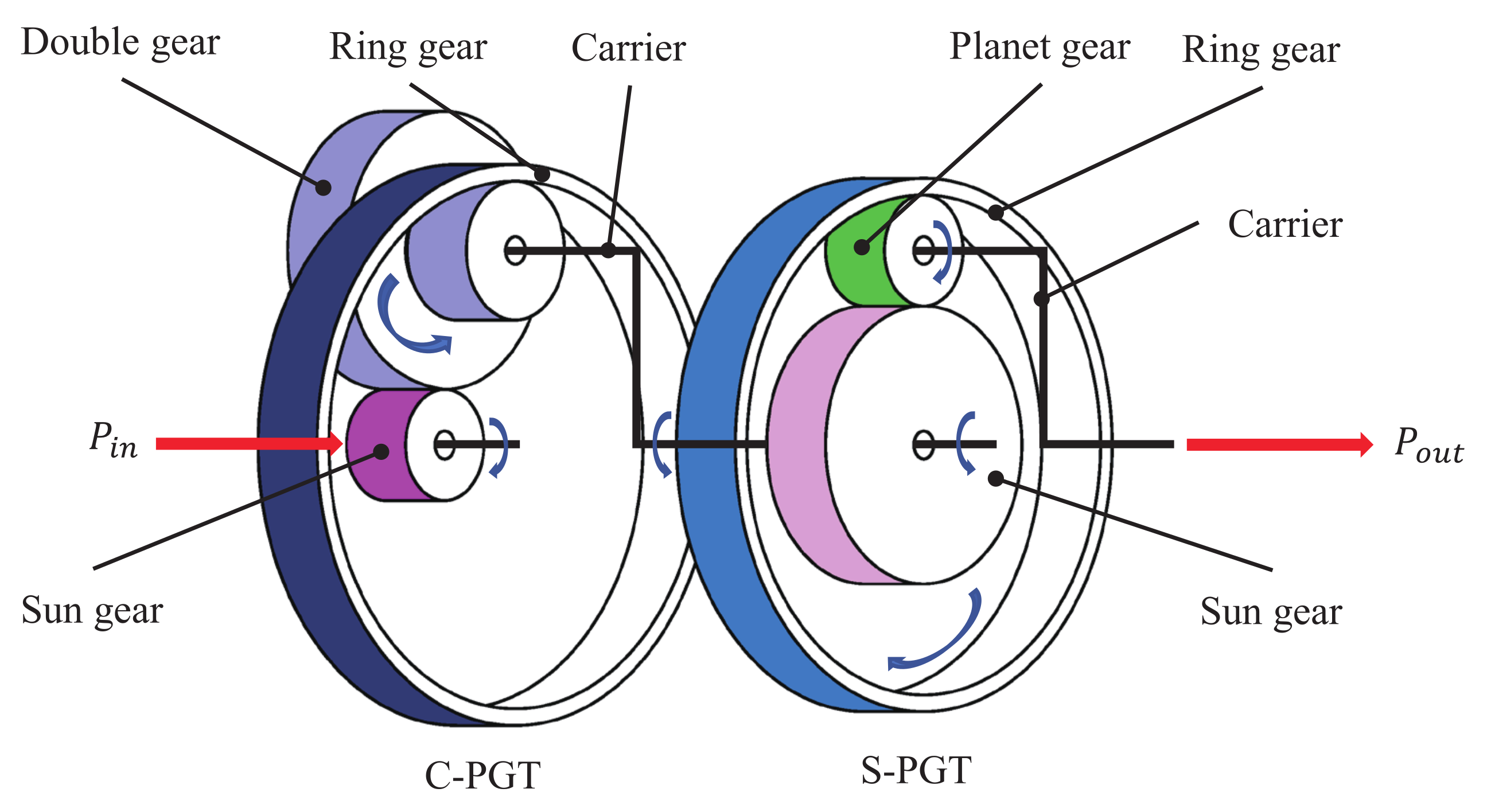
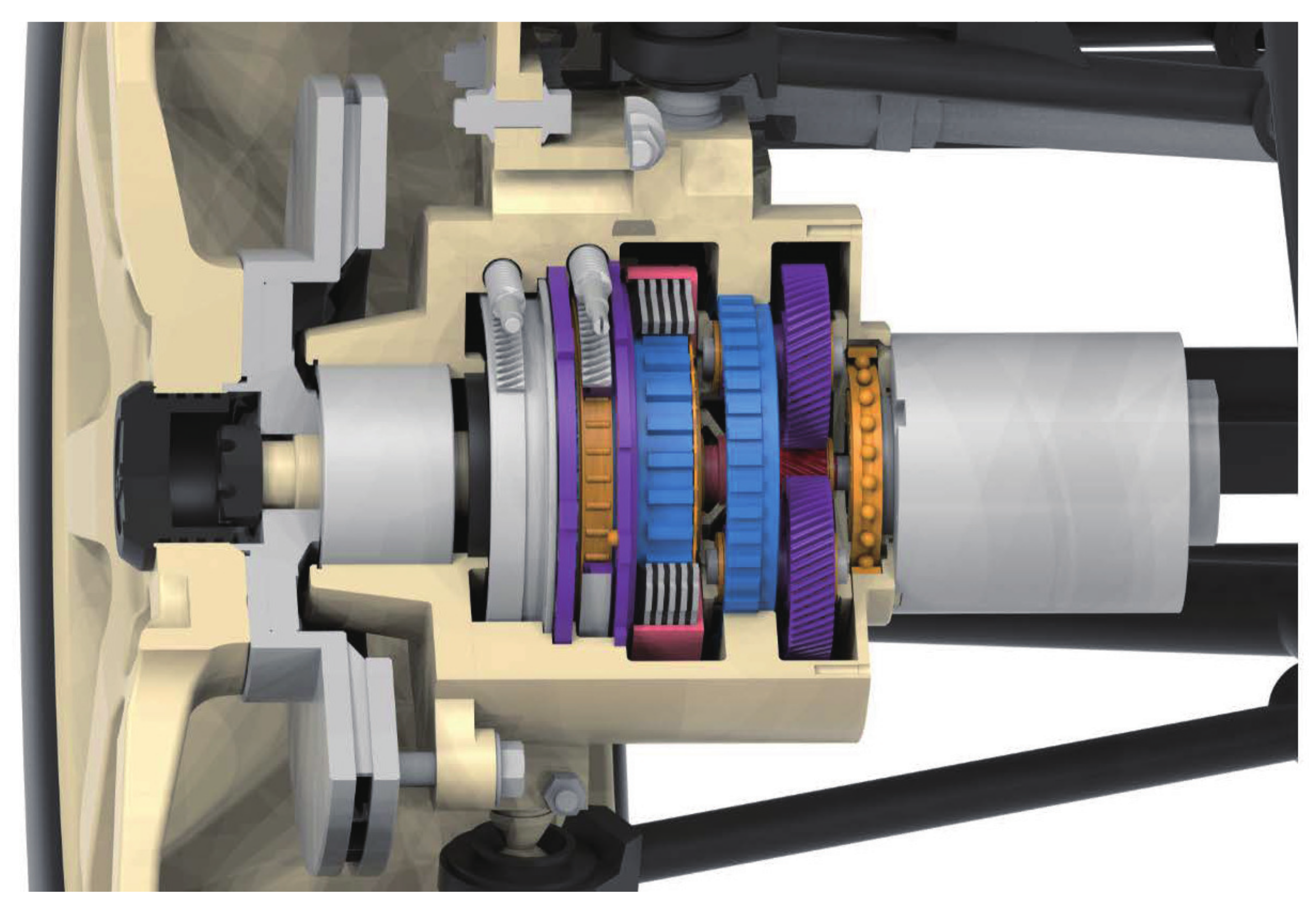
In this paper, we describe an in-wheel two-speed AMT (IW-AMT) that uses the SOWC. Moreover, the proposed IW-AMT unit also consists of two planetary gear sets and a wet multi-plate clutch (WMPC) unit. The IW-AMT uses a single motor that cooperates with a mechanical shift actuator to realize the change of the two gears without power interruption, which effectively reduces the unsprung mass and motor technical specifications, in addition to improving vehicle performance. To demonstrate the proposed IW-AMT with the SOWC shifting process and evaluate the quality of shifting, we perform a simulation by using a virtual prototype simulation model of IW-AMT and improve the WMPC combination curve and the SOWC structure based on the simulation results to achieve superior shift quality.
In
Section 2, we describe the structure and characteristics of IW-AMT with the SOWC. In
Section 3, the ideal shifting process of IW-AMT is analyzed, which includes the upshift/downshift process. In
Section 4, a virtual prototype simulation model of IW-AMT with the SOWC is established to demonstrate the changes in key parameters during gear shifting. In
Section 5, the simulation results are discussed. Finally, our conclusions and future work are provided in
Section 6.
3. Gear Shifting Process
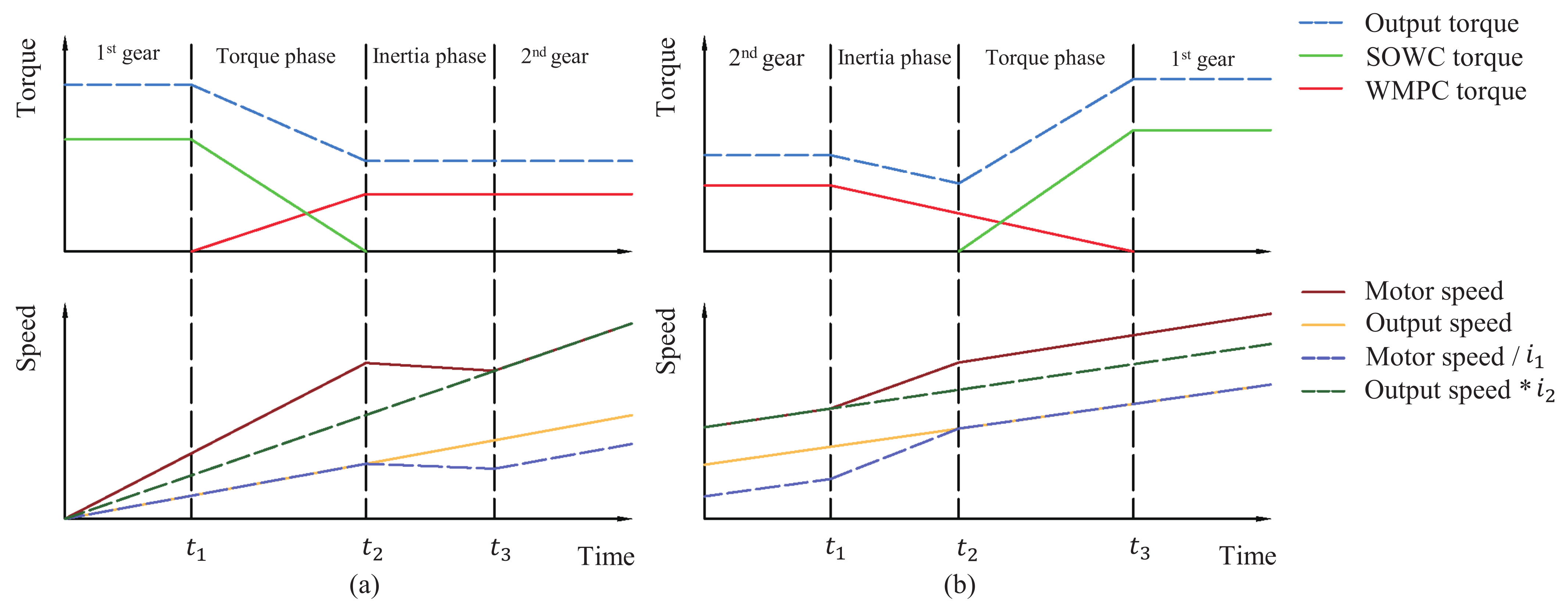
The IW-AMT entire gear shifting process includes the torque and the inertia phases [
18]. The torque phase represents the phase of torque exchange during gear shifting. In the torque phase, the motor speed does not change suddenly, and the torque transmitted by each component is mutually exchanged. The torque phase ends when the torque synchronization is completed. The inertia phase represents the synchronization phase of the drive and driven components during the shifting process. In the inertia phase, there is no mutual exchange of torque, and the speed difference between the driving and the driven part of the clutch is gradually synchronized. The inertia phase ends when there is no speed difference in the clutch. The ideal shifting process of IW-AMT is shown in
Figure 9.
During upshifting, the WMPC starts to combine, marking the start of the torque phase. With the gradual combination of the WMPC, the torque transmitted increases gradually, and the torque that the SOWC transmits decreases gradually. When the torque transmitted by the SOWC decreases to zero, the torque phase ends, and the inertia phase starts. At this time, the selector plate rotates, and the forward and reverse struts of the SOWC are raised sequentially. When the inertia phase starts, there is a speed difference between the driving part and the driven part of the WMPC. As the sliding grinding process continues, when the speed difference between the driving and the driven parts gradually decreases to zero, the inertia phase ends, and the EV starts to drive stably in the second gear.
During downshifting, the IW-AMT first enters the inertia phase, WMPC starts to separate gradually and enters a slipping state, and its transmission torque gradually decreases. As the speed difference between the driving and the driven parts of the WMPC gradually increases, the ring gear of the S-PGT decelerates gradually by the resistance torque. The inertia phase ends when the rotational speed of the ring gear is zero. At this time, the selector plate rotates and the SOWC forward and reverse struts are dropped sequentially, and the drive system enters the torque phase. As the WMPC continues to separate, its transmission torque further decreases, and the SOWC transmission torque gradually increases. The torque phase ends when the WMPC transmission torque decreases to zero, and the EV starts to drive stably in the first gear.
4. Simulation Model and Results
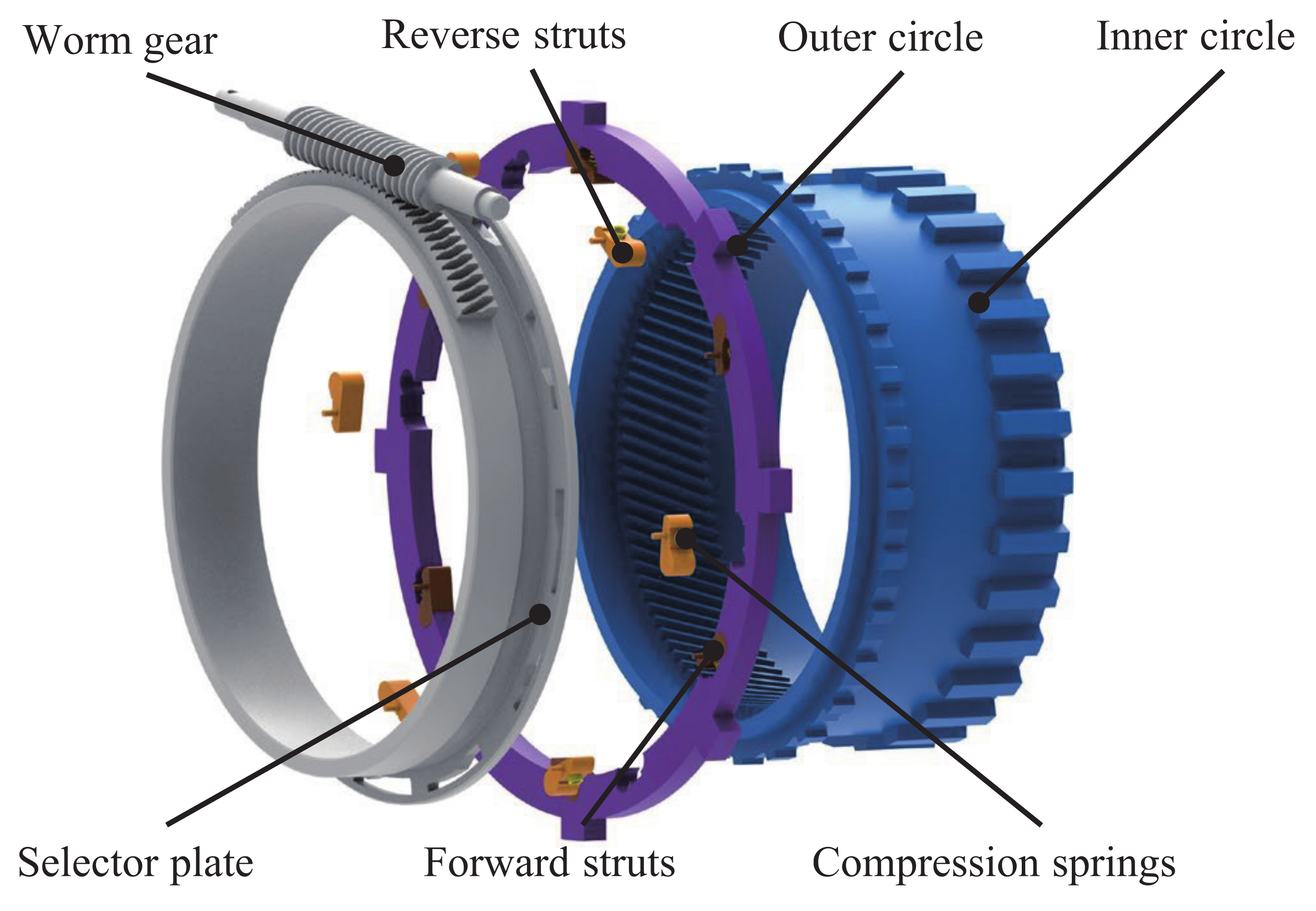
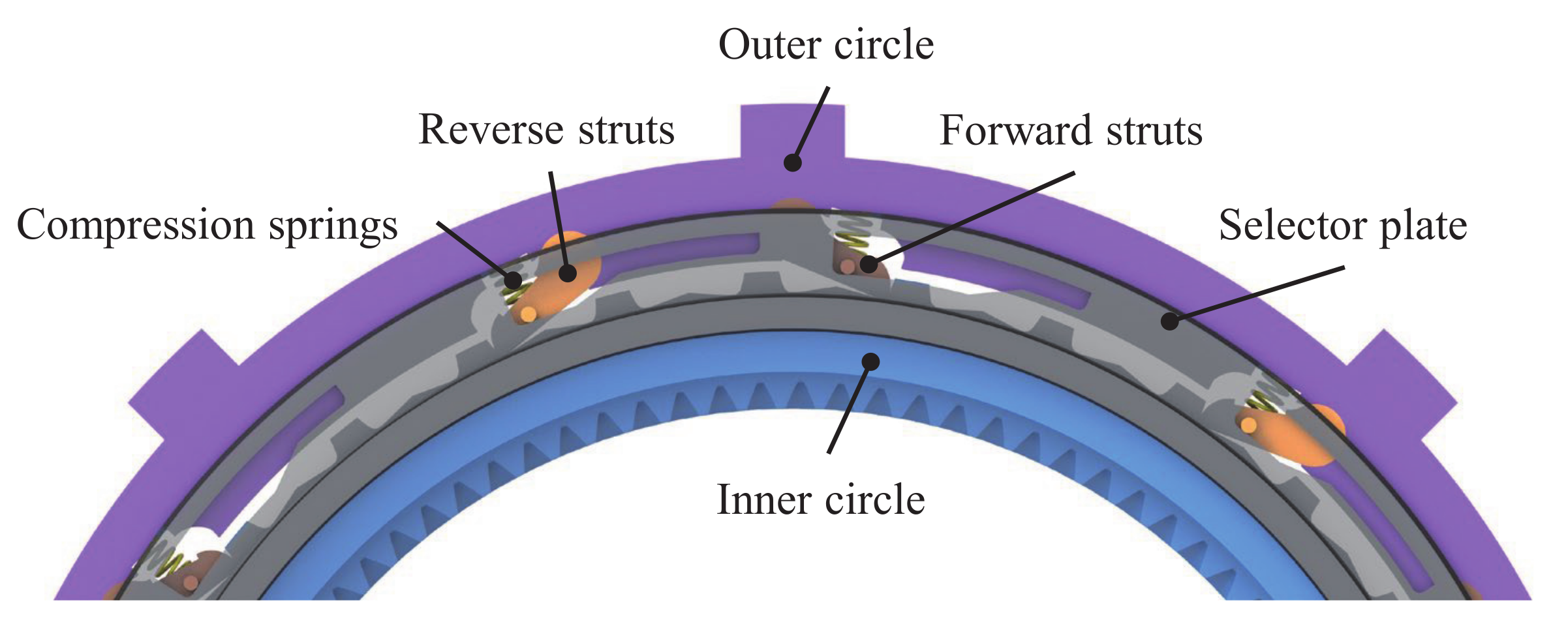
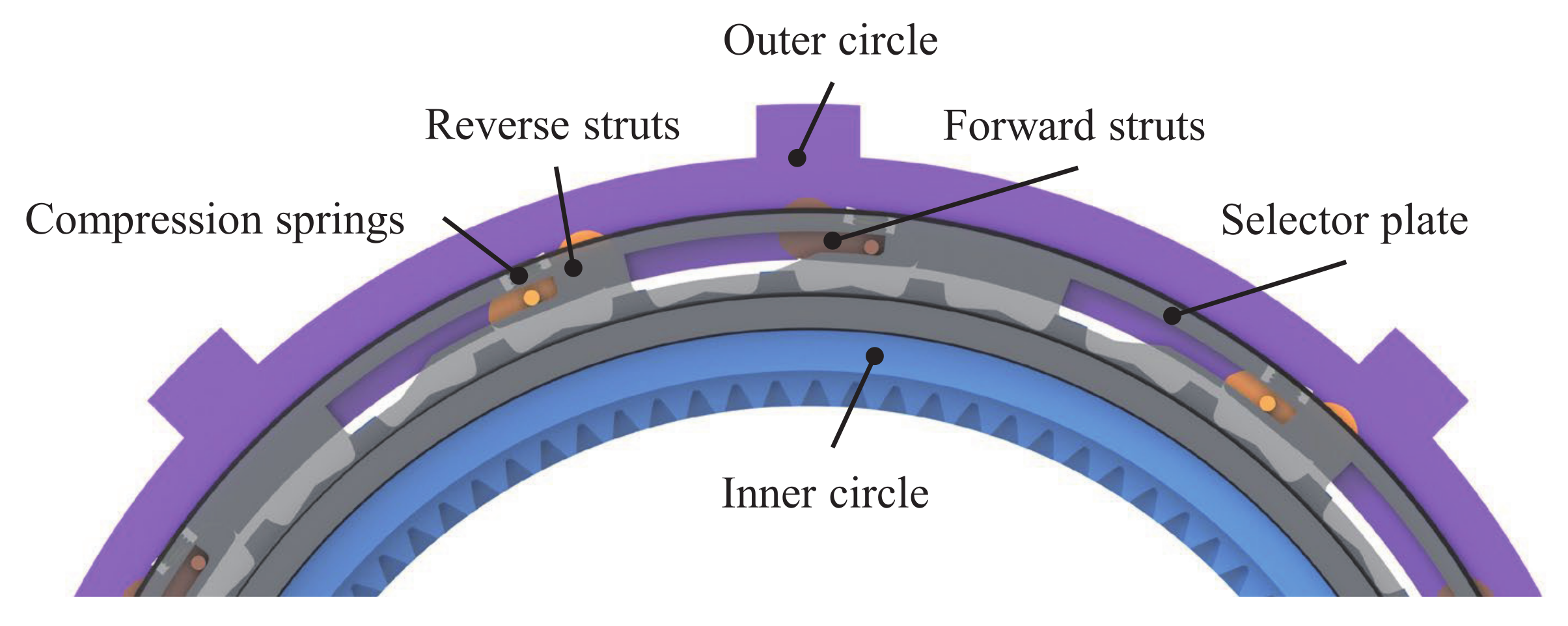
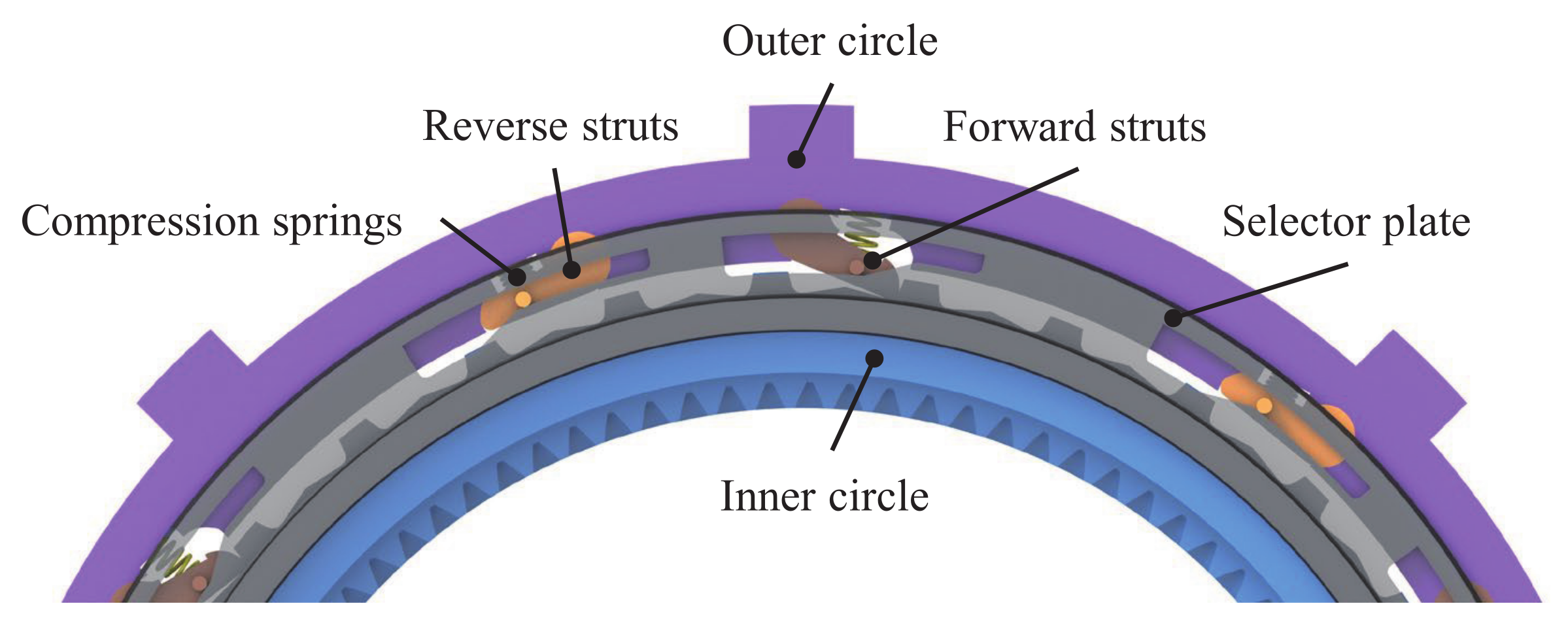
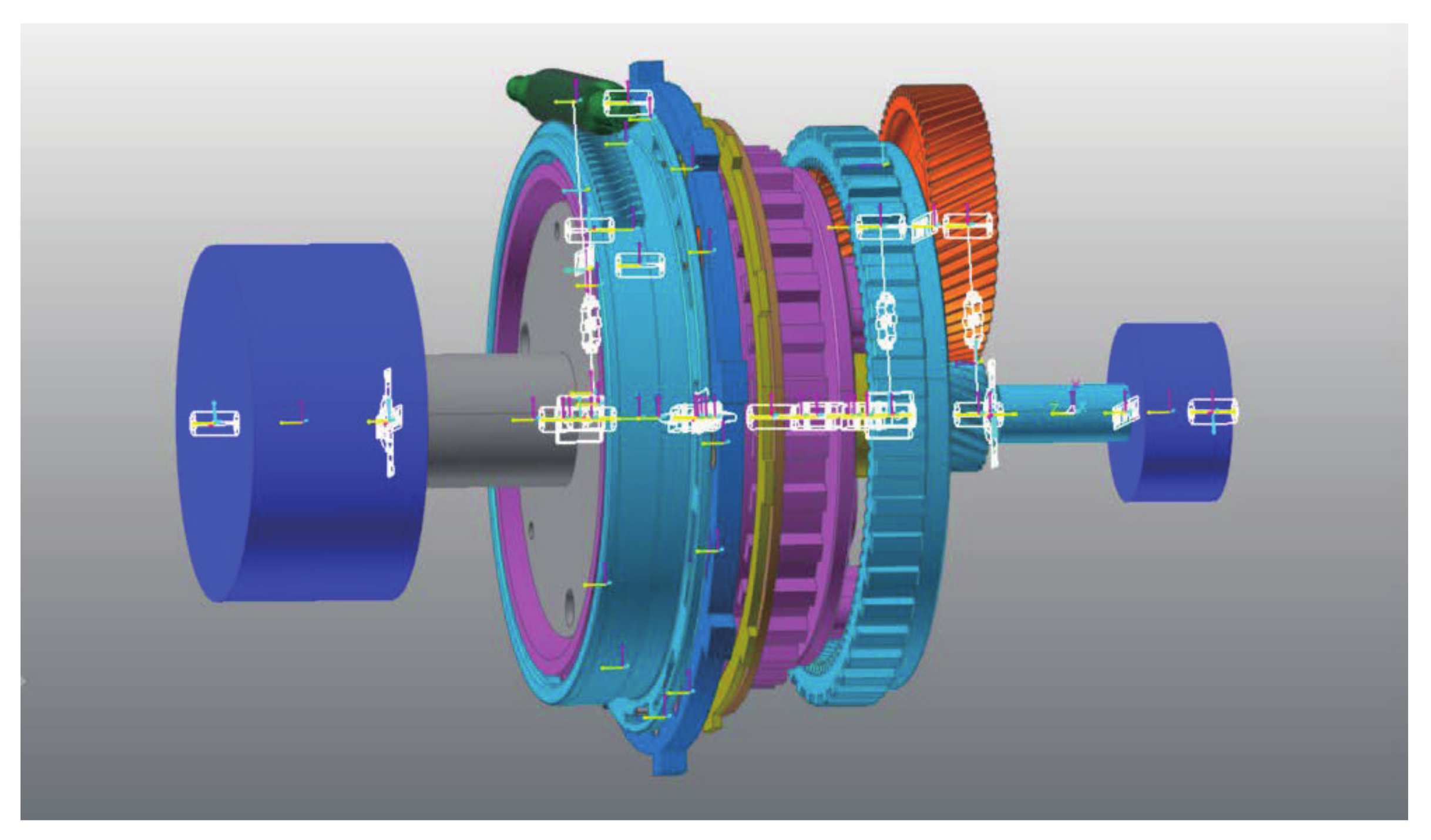
To clearly depict the changes in the torque and speed of each component of the IW-AMT system with the SOWC during the gear shifting process and evaluate the quality of shifting, we established a virtual prototype simulation model of the IW-AMT. The simulation model was composed of the motor and vehicle equivalent model, two-stage planetary gear train model, and SOWC model, including outer circle, inner circle, worm gear, selector plate, struts, and compression springs. The virtual prototype simulation model is shown in
Figure 10, and the main parameters are summarized in
Table 3.
In the virtual prototype simulation model, we modeled the motor as a rigid body whose rotational inertia is
. At the output end of the simulation model, we constructed a cylindrical rigid body to simulate the equivalent inertia of the vehicle. The vehicle resistance torque
includes the rolling resistance torque
, air resistance torque
, acceleration resistance torque
, and ramp resistance torque
. The vehicle resistance torque was applied to the output terminal to simulate changes in the resistance torque during driving.
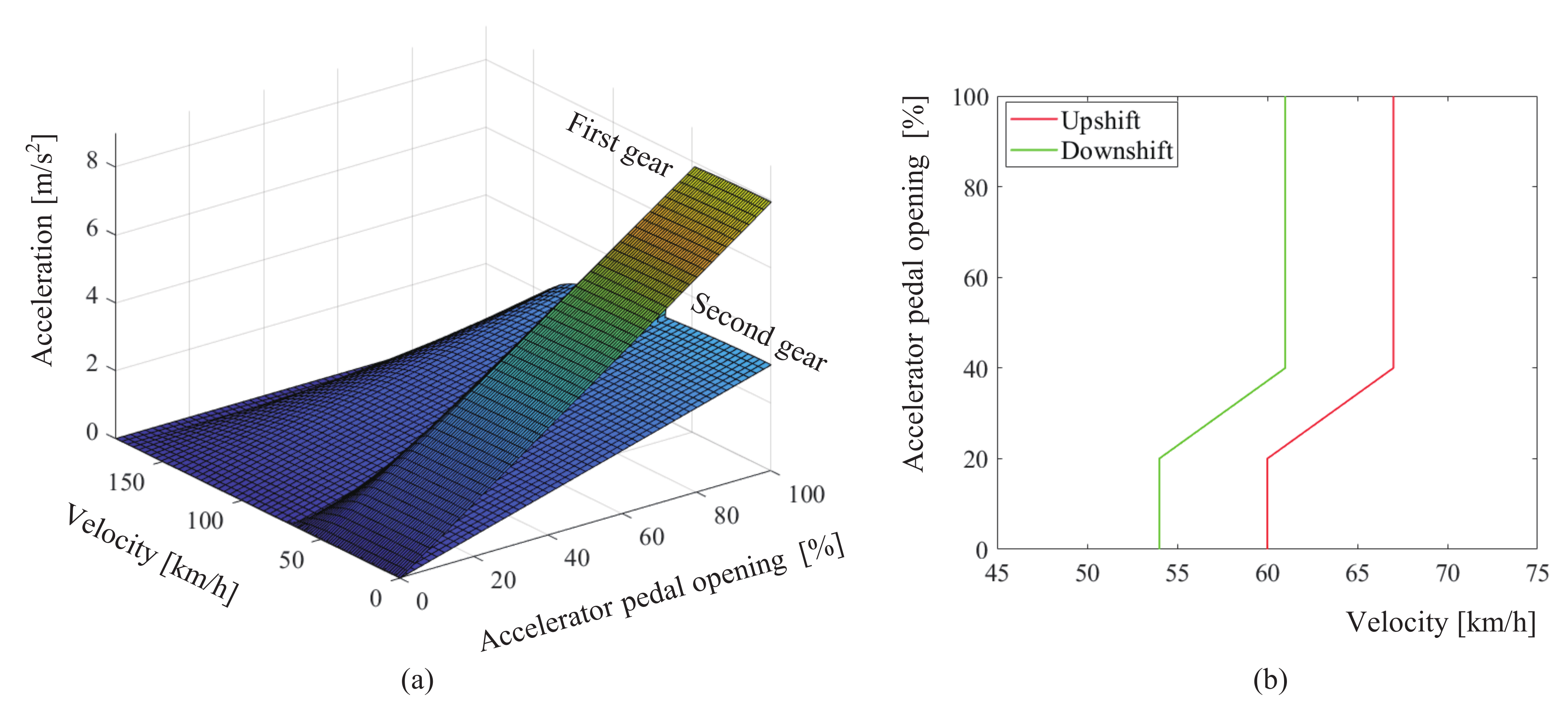
To improve vehicle dynamics and make full use of motor power. We designed a dynamic dual-parameter shifting schedule, as shown in
Figure 11, taking the intersection of the vehicle acceleration curves at different accelerator pedal openings in two adjacent gears as the shifting point. To avoid frequent shifts near the shift speed, we delayed the downshift curve by 6 km/h.
The jerk of the vehicle
j is an important indicator for evaluating ride comfort, and the recommended value of Germany is
10 m/s
[
27]. In IW-AMT, the SOWC is used to transmit torque in the first and reverse gears, which does not have the gradual engaging process that a friction clutch does.Therefore, we select the jerk as a criterion to evaluate the quality of shifting. During the shifting process, the jerk
j can be expressed as:
where
a and
v denote the longitudinal acceleration and velocity of the vehicle.
Because we focus on the parameter changes of IW-AMT during the shifting process, the period time of the shifting process is intercepted and displayed in the simulation results.
4.1. Upshifting Process
In the initial stage of the upshifting process, the SOWC forward and reverse struts are dropped to lock the ring gear of the S-PGT. With the gradual combination of the WMPC, the upshifting process starts. The simulation results are as follows:
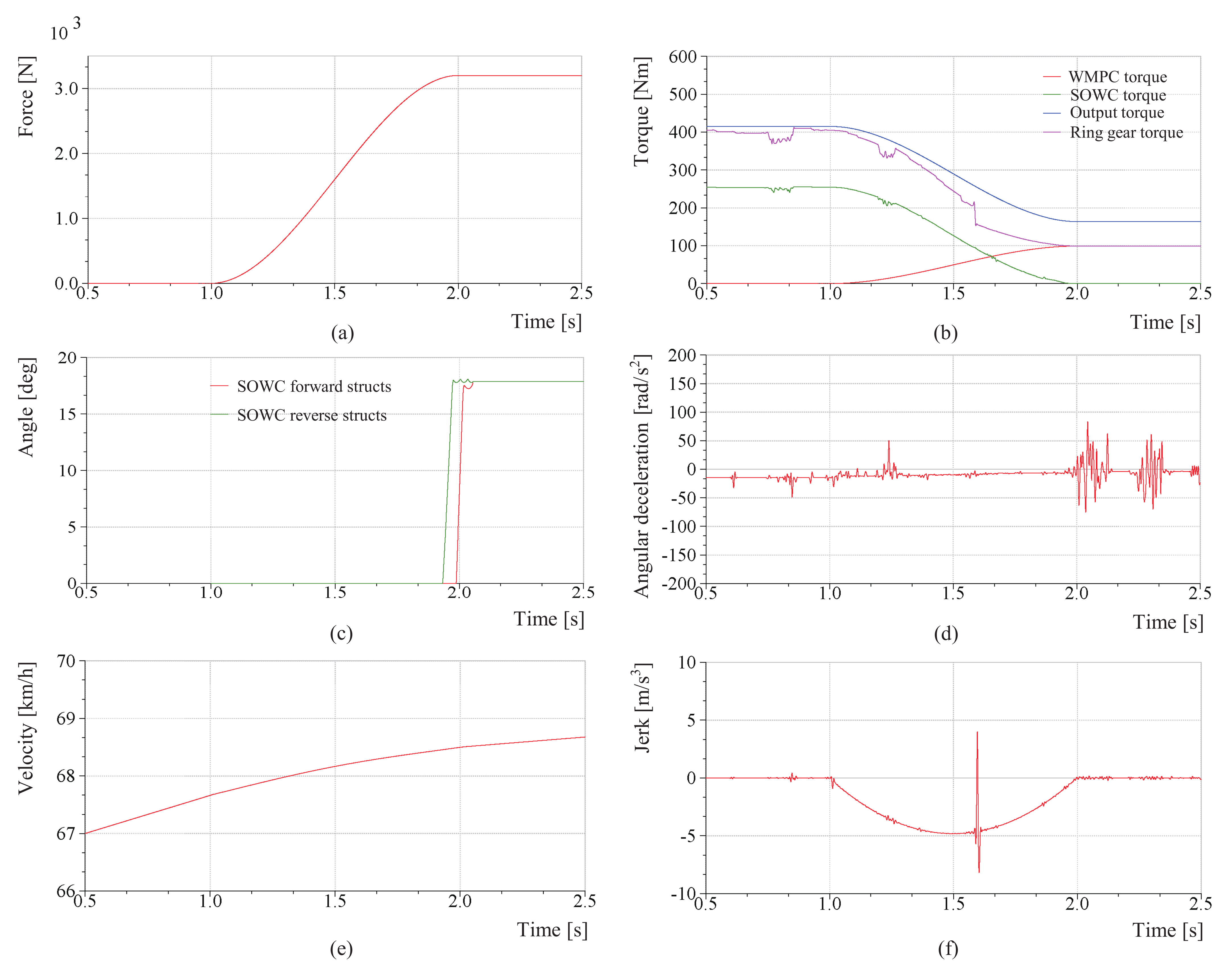
As shown in
Figure 12, when the upshifting process starts at 1 s, as the WMPC compression force gradually increases, its transmission torque increases gradually, and the transmission torque of the SOWC forward struts decreases gradually. At approximately 2 s, the SOWC transmission torque decreases to zero, forward and reverse struts are controlled to rise sequentially. The struts can be raised smoothly when the transmission torque of the ring gear is not decreased to zero, the switching time of the struts is about 0.04 s, and the forward strut’s lag behind the reverse struts is about 0.05 s. Throughout the upshifting process, the torque and the vehicle velocity change smoothly, without torque interruption, and the maximum jerk is less than 10 m/s
.
4.2. Downshifting Process
The downshifting process is basically the opposite of the upshifting process. In the initial stage of the downshifting process, the SOWC is overrunning, its forward and reverse struts are raised, and the WMPC is in a stable combined state. With the gradual separation of the WMPC, the downshifting process commences. To simulate the power downshift of the vehicle, we increase the ramp resistance torque to simulate the vehicle climbing condition for fulfilling the power downshift condition. The simulation results are as follows:
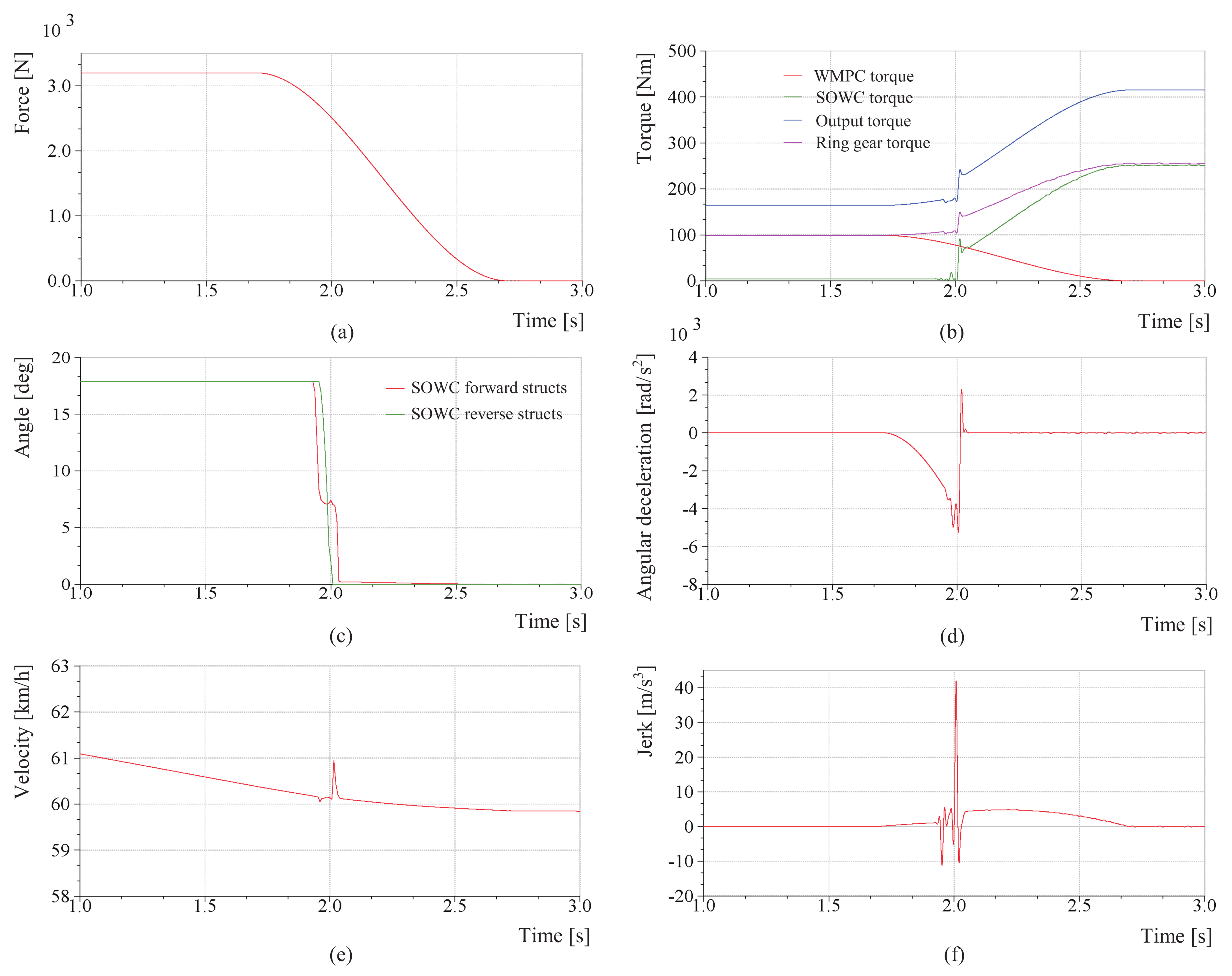
As shown in
Figure 13, the downshifting process starts at approximately 1.7 s, and as the WMPC compression force decreases, the transmission torque gradually decreases. This causes the S-PGT ring gear to gradually reduce its rotational speed under the action of the resistance torque, and there is a tendency for reverse rotation. When the rotational speed of the ring gear decreases to zero, the SOWC forward and reverse struts are dropped sequentially. When the forward struts come into contact with the ring gear, the rotation angle curve fluctuates; at this time, the forward struts have locked the ring gear and then the reverse struts dropped smoothly. The reverse struts dropped behind the forward struts at about 0.05 s but dropped completely about 0.05 s earlier than the forward struts. At approximately 2.7 s, the WMPC is completely separated, all of the torque is transmitted by the SOWC. The torque fluctuation during the entire downshifting process is greater than that during the upshifting process. The maximum jerk is approximately 41 m/s
, and part of the reason may be that the ring gear has a higher deceleration when the struts dropped.
4.3. Improvement of Jerk
To reduce the peak jerk of the vehicle during downshifting and improve ride comfort, we analyze the momentary state of the SOWC forward struts that are dropped during downshifting.
As can be seen from the previous simulation results, when the SOWC forward struts are dropped for approximately 2 s during the downshifting process, the vehicle torque fluctuates considerably. One of the reasons for this fluctuation is that the ring gear of the S-PGT decelerates to a greater extent when the WMPC gradually separates. When the SOWC forward struts are dropped, it resists deceleration and produces a jerk. Therefore, we start by reducing the deceleration of the ring gear to reduce the jerk when the struts are dropped. The IW-AMT shift process indicates that if the WMPC continues to transmit torque during the sliding process, the deceleration of the ring gear under the action of the resistance torque can be decreased, and in this manner, the jerk induced when the forward struts are dropped can be reduced. The improved WMPC compression force curve and downshift simulation results are as follows:
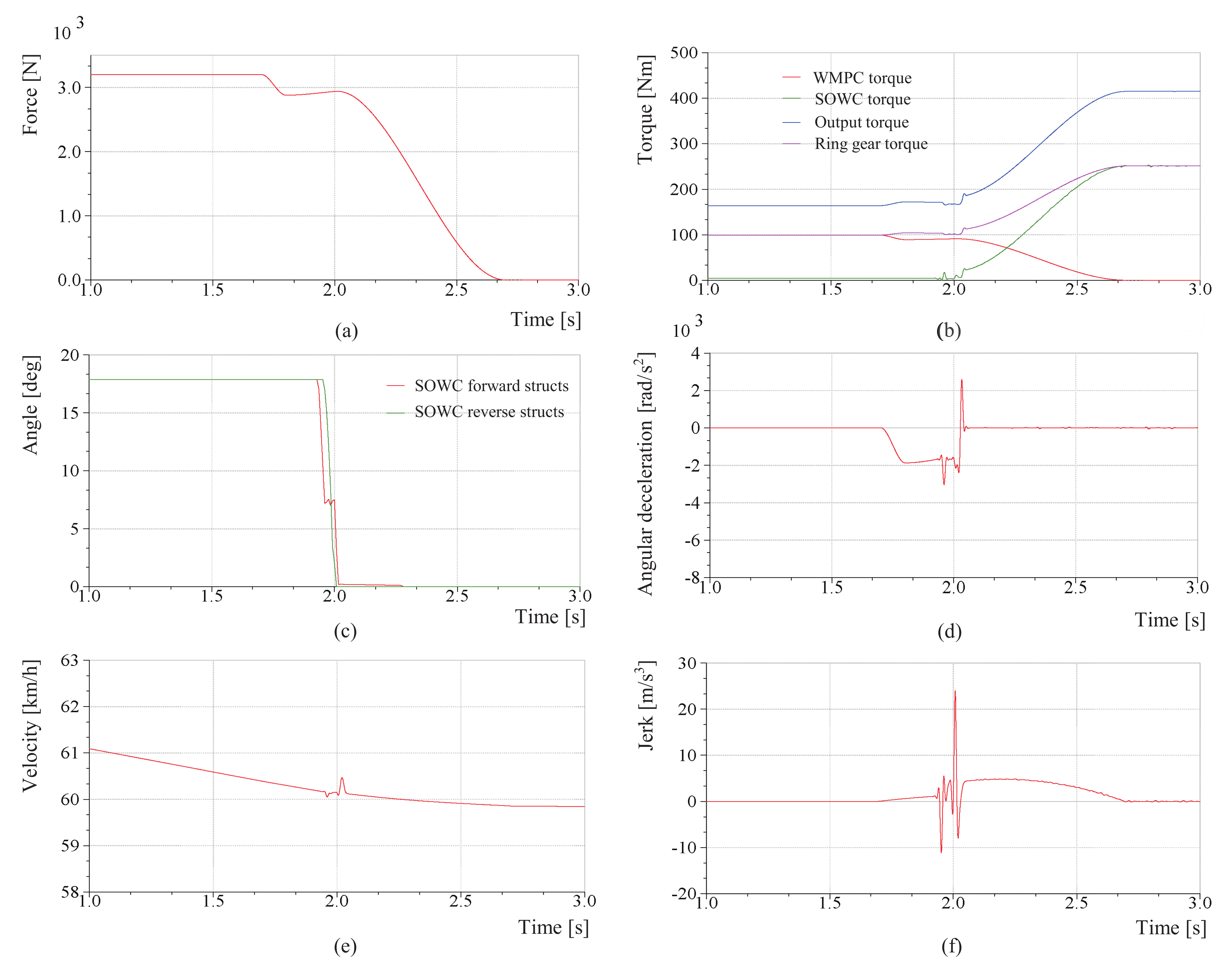
As shown in
Figure 14, after the improvement of the WMPC combined curve, the jerk caused by the falling of the SOWC forward struts decreased. The torque and velocity of the vehicle during the downshifting process were relatively stable, and the peak jerk was significantly reduced. The maximum jerk was approximately 23 m/s
. Furthermore, we started with the SOWC structure and attempted to improve it to reduce the jerk.
Many studies have indicated that reducing the freeway angle of the SOWC is beneficial for reducing the jerk when the struts are dropped [
28], but owing to the size limitation of the SOWC structure, the potential for improvement of the freeway angle is small. The SOWC freeway angle designed in this paper was 2°.
where
is the freeway angle,
a the number of struts grouping,
n the number of struts, and
z the number of teeth in the inner circle.
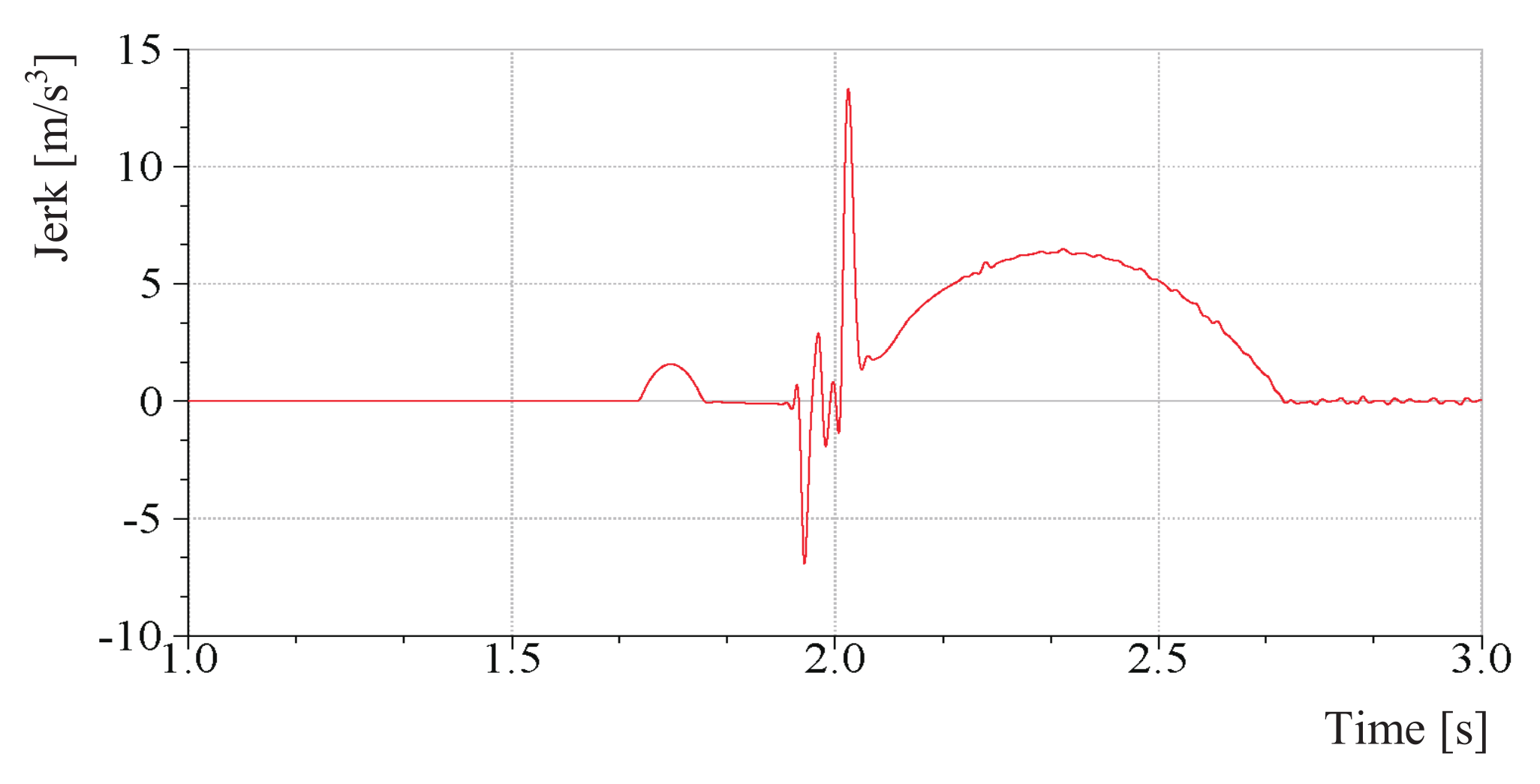
Furthermore, we refer to the principle of engine corner cushion cushioning and try to arrange a cushion with a certain stiffness and damping on the outer circle of the SOWC to alleviate the instantaneous impact when the SOWC forward struts are dropped. The stiffness coefficient of the cushion is 693.595 N/mm, and the damping coefficient is 0.466 N/(mm/s). The simulation results are shown in
Figure 15, where the maximum jerk is approximately 13 m/s
. The simulation results show that the placement of cushions has a significant effect on reducing impact.
5. Discussion
The simulation results of the upshifting process indicated that the vehicle speed and torque changed smoothly, and the jerk was less than 10 m/s. The was ascribed to the fact that the SOWC struts do not drop instantly during the upshifting process, and the magnitude of jerk is strongly related to the WMPC combination curve. The simulation results of the downshifting process indicated that when the WMPC separation curve was opposite to the combined curve, the impact of the jerk was approximately 41 m/s, and the shift impact was obvious. This is because the SOWC forward struts must drop during the downshifting process to instantly lock the ring gear of the S-PGT. Then, we start from the instantaneous state of the SOWC. After we improved the WMPC separation curve, the vehicle torque, and speed changed more smoothly, and the jerk was approximately 23 m/s, which represented a certain decrease but was nevertheless higher than the 10 m/s recommended value of Germany. Furthermore, we improved the SOWC structure by imitating the principle of engine corner pads and evenly arranged cushion rubber pads on the SOWC outer circle. Thereafter, the simulation results indicated that the jerk due to downshifting was approximately 13 m/s, since the SOWC does not follow a continuous process of combination and separation as in the case of the WMPC.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}