The vehicle stability boundary determines the intervening and exiting time of the vehicle stability control system, which is the basis of vehicle stability control. Most of the vehicle instability occurs in the nonlinear zone of the tire (that is, with the increase of the side angle of the front or rear wheels, the lateral force generated by the tire gradually tends to be saturated and the vehicle is prone to sideslip, resulting in the vehicle deviating from the driver’s expected trajectory or producing more dangerous working conditions such as tail dumping). Therefore, the stability control of the vehicle needs to focus on the stability boundary of the vehicle.
3.1. Design of Boundary Functions in Phase Plane Stability Domains
The division of stability domain in phase plane has an important influence on the stability control of vehicle, and the reasonable and accurate division of stability domain determines the time of intervention and exit of vehicle stability control system. In this paper, the phase plane of the sideslip angle-yaw rate (-) is used as a means to analyze the phase plane of the vehicle stability domain. By establishing the vehicle dynamics model and tire model, the phase plane of the sideslip angle-yaw rate (-) is drawn for analysis.
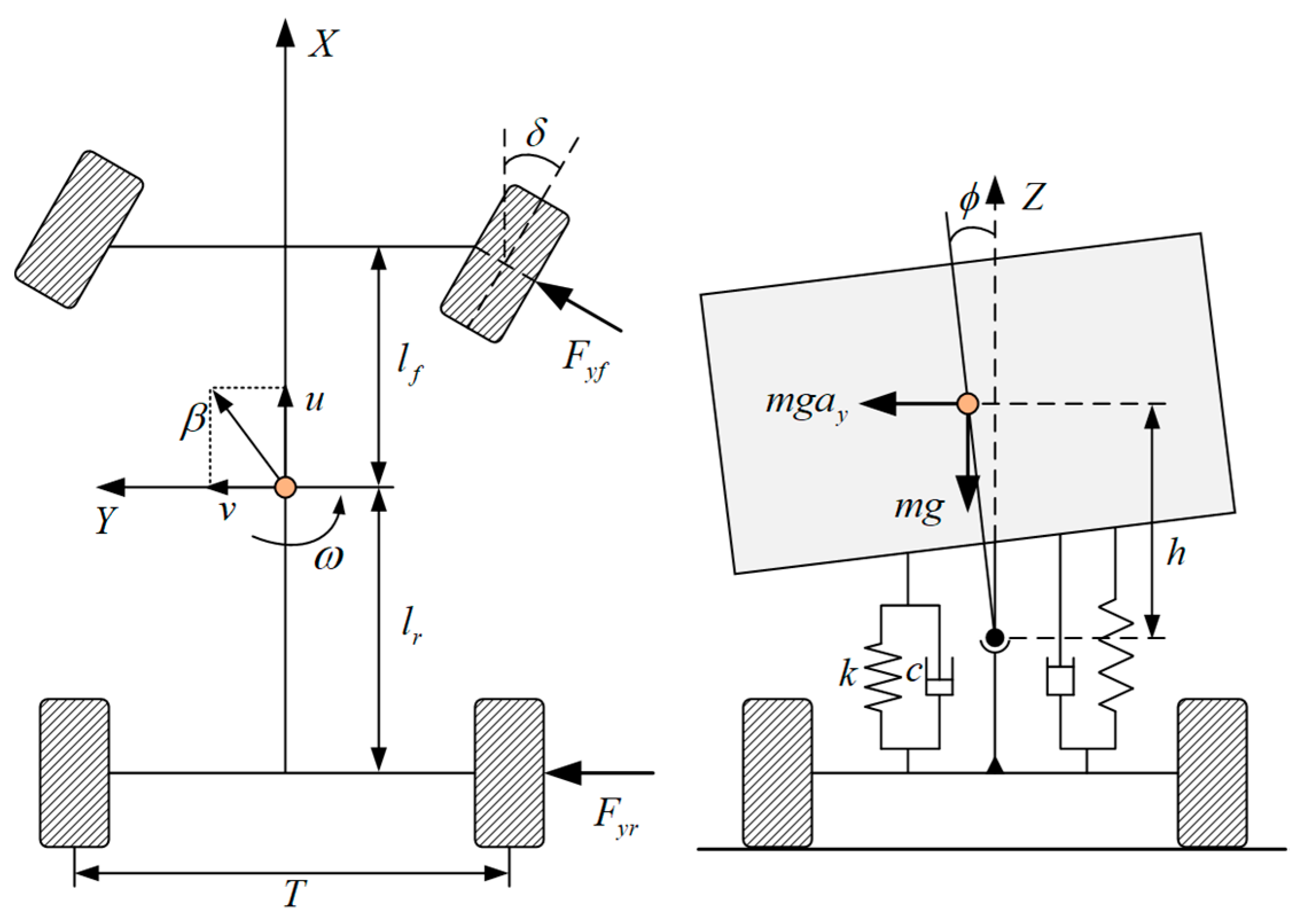
Assuming that the vehicle has a constant longitudinal velocity over a short period of time, the 2-DOF model of the vehicle with nonlinear tire force characteristics can be described by the sideslip angle-yaw rate differential equation as follows
where
and
are the lateral deflection forces of the front and rear axes, respectively.
According to Equation (28), the equilibrium point should satisfy , and Matlab can be used to solve the equilibrium point and draw the plane plan of the phase trajectory.
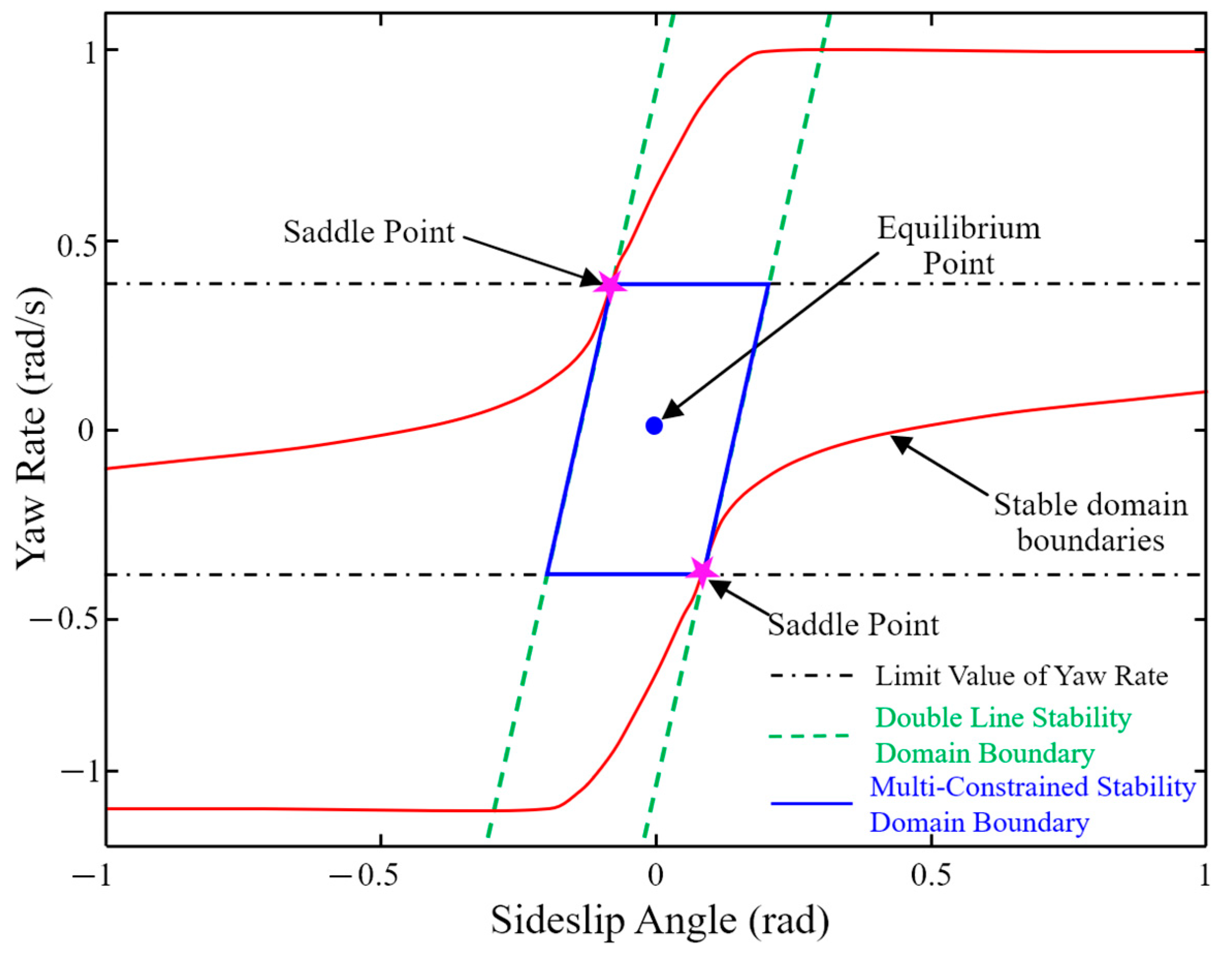
For accurate and reasonable on the phase plane stability domain, in this paper, the stability domain of the currently used classified methods such as double line method, diamond, circular and envelope method analysis summary, found that different stability domain division method has its advantages and disadvantages. Therefore, in this paper, based on double line method based on fusion the yaw rate constraint control, we put forward a kind of phase plane stability domain division method under multiple constraints, as shown in
Figure 10.
Double line method by solving a saddle point of two parallel straight lines to determine the stability domain boundaries, the two saddle points has the following characteristics: (1) symmetrical about the origin of coordinates; (2) having the closest distance from the equilibrium point. The constraint of the stability domain boundary on the sideslip angle can be determined by the following expression:
where,
and
are boundary coefficients of stability domain, which are related to longitudinal vehicle speed, front wheel angle, road adhesion coefficient and other factors. The slope of the boundary is
, the lateral width is
, and the longitudinal width is
. The specific function of the stability domain boundary can be obtained by determining the coordinate value of the saddle point and the slope of the stability domain boundary.
The data between the longitudinal velocity, front wheel angle and road adhesion coefficient and the phase plane stability domain boundary are shown in the
Table 4.
According to
Table 4, it can be seen that the longitudinal speed affects the lateral width of the boundary of the stability domain, and the two are negatively correlated. The function between the lateral width
and the longitudinal speed
can be obtained by fitting the data in the table as follows
The relationship between the stability domain boundary coefficient
and the longitudinal vehicle speed
is
According to
Table 5, the road adhesion coefficient has a great influence on the slope
and lateral width
of the stability domain boundary. Based on the data in the table, curve fitting between slope
and longitudinal vehicle speed
can be obtained
Since the slope
and the lateral width
of the boundary of the stability region are also related to the longitudinal vehicle speed
, in order to establish the function expression of the lateral width
and the longitudinal vehicle speed
in this case,
is defined as the ratio of the lateral width under different road adhesion and the lateral width when the adhesion coefficient is 0.8. According to the data in
Table 5, the relationship between
and
can be written as
In order to establish the relationship between the offset of the longitudinal boundary and the angle of the front wheel, the value of the intersection of the stability boundary on the left and the
axis in the phase plane is defined as
, and the value of the intersection of the stability boundary on the right and the
axis in the phase plane is defined as
.
is the offset of
value when the front wheel angle is 0°, and
is the offset of
value when the front wheel angle is 0°, as shown in
Table 6 and
Table 7.
According to the data in
Table 7, the offset
,
and front wheel angle
can be obtained by curve fitting
After rearranging the above formula, the boundary function expression of the phase plane stability domain under the multi-constraint method can be obtained as
where
is the lateral offset,
i = 1, 2.
3.2. Calculation of Phase Plane Stability Margin
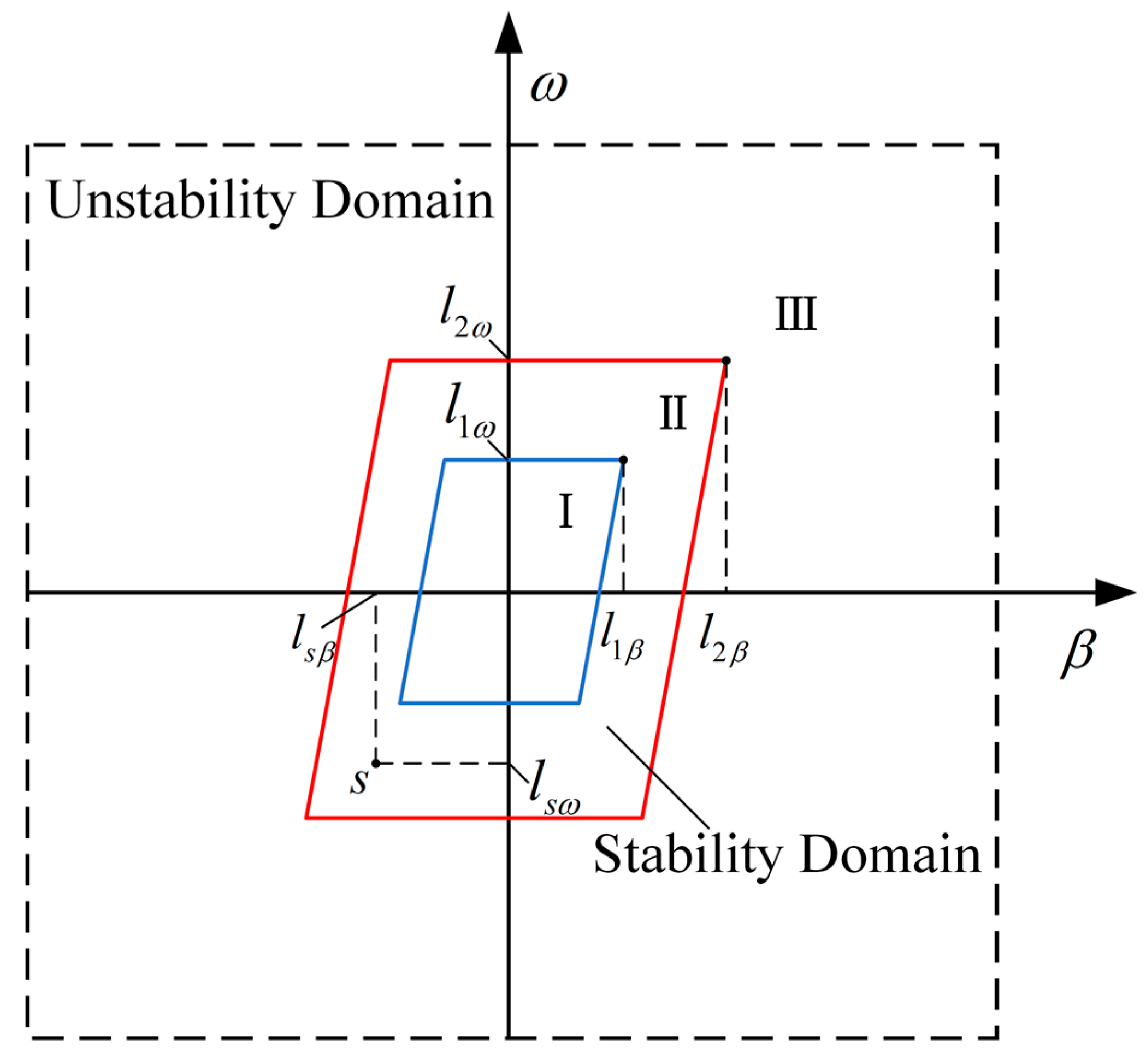
According to the above method for determining the boundary function of the stability domain of the
-
phase plane, the stability region is divided into three parts within the determined boundary of the stability domain, which are shown in
Figure 11. Any
point in the stability region represents the motion state of the vehicle at the current moment, and
and
are the yaw rate value and the sideslip angle value of the vehicle at the point
.
and
are the maximum yaw rate value and the maximum sideslip angle value of the vehicle in area I and II, respectively. In this paper, considering the positions of
and
in the phase plane stability domain, the distance between the current state of the vehicle point
and the coordinate axis is adopted as the evaluation index of the phase plane stability margin, and its value can be expressed as
According to the calculation, the value range of is (0, 1] when is in zone I, (−1, 0] when is in zone II, and (−2, −1] when is in zone III.
3.3. Multi-Objective Stability Coordination Control Strategy
The key of multi-objective optimization problem is how to coordinate each objective and make appropriate "compromise" between each other in order to obtain the overall optimal solution to achieve the expected goal. In order to realize the coordinated control of tracking accuracy, lateral stability and roll stability of intelligent commercial vehicle in the track tracking process, this paper combined LTR and - phase plane stability domain analysis on the basis of lateral track tracking control and vehicle roll stability analysis to determine the current state of the vehicle. The linear weighted control algorithm is used to coordinate the above three objectives, and the optimal control variable of the front wheel angle is output.
The linear weighting method is a common method in the multi-objective coordinated control algorithm. It divides the importance of each sub-control objective and then transforms each sub-control objective into the following function form
where,
is the weighted factor coefficient of each control objective, and its value reflects the importance of each sub-control objective to the whole coordinated optimization problem.
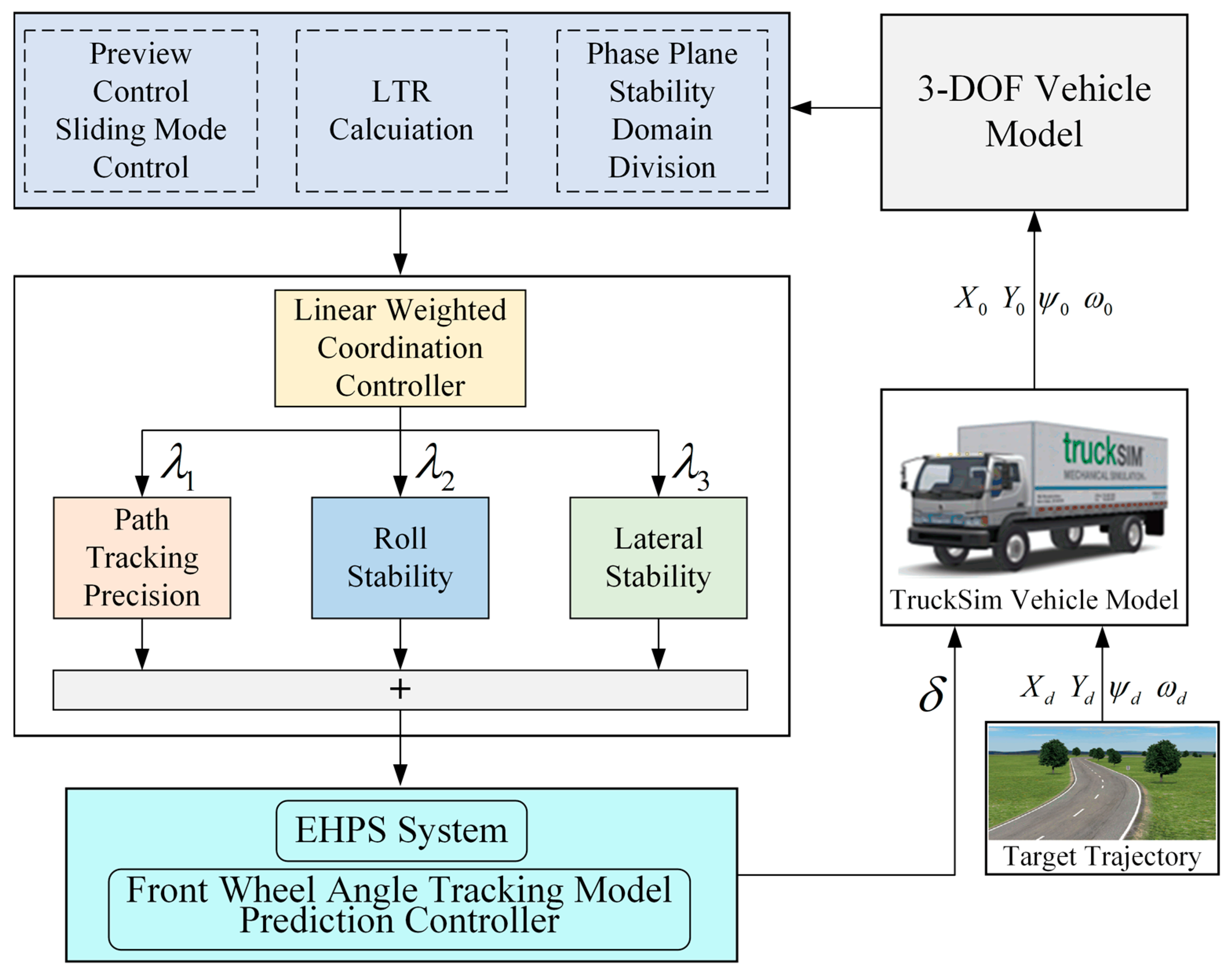
In this paper, the linear weighting algorithm is used to coordinate the control of the above three objectives, and the block diagram of the control algorithm is shown in
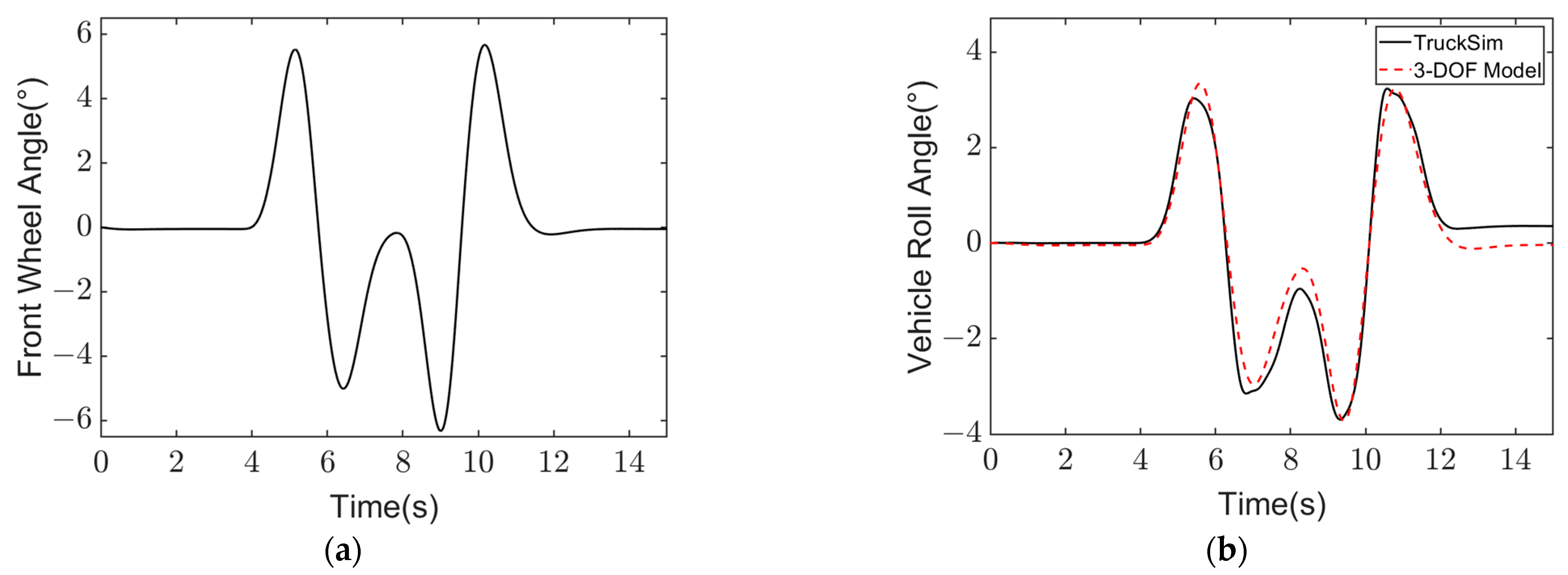
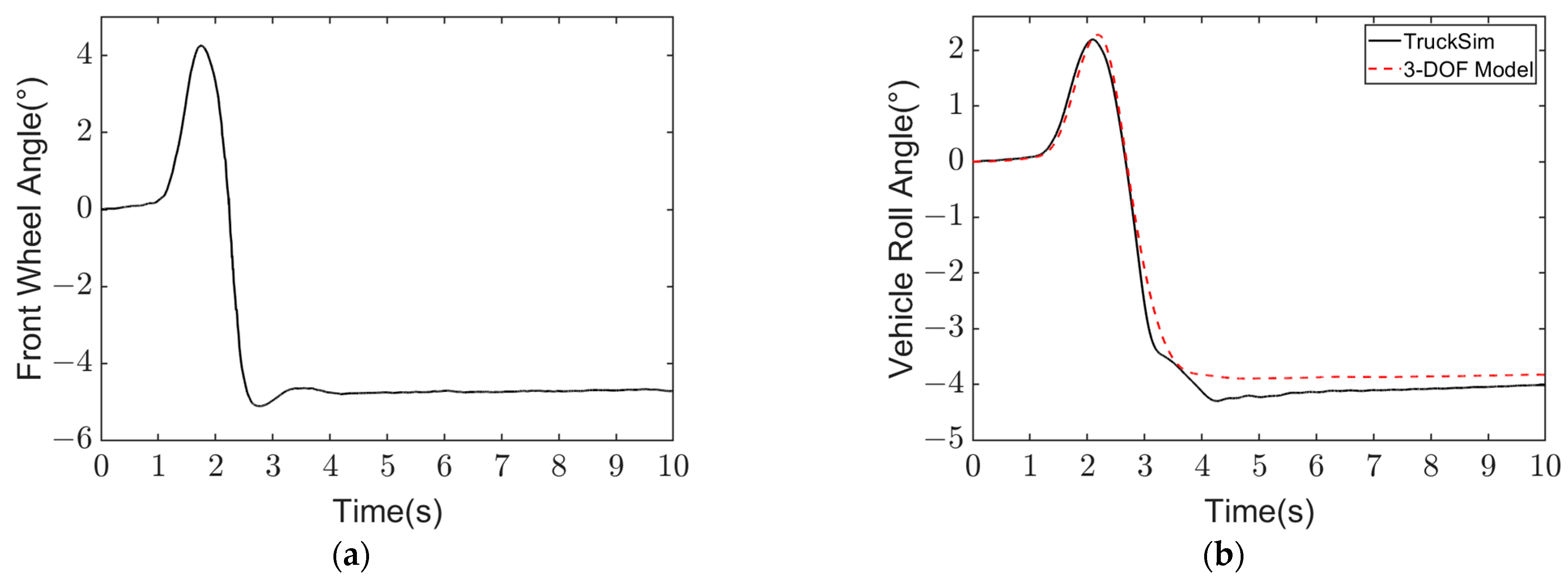
Figure 12. The accurate tracking of the target trajectory is realized by the trajectory tracking fusion controller, and then the roll angle of the vehicle in the process of trajectory tracking is estimated by the 3-DOF model, which is used to calculate the
LTR, and the lateral stability of the vehicle is calculated by using the
-
phase plane stability domain boundary function. Finally, based on the linear weighted coordination controller, the weights of each target are assigned to determine the weights of each sub-control target, and the final control target is determined. On the basis of multiple simulations, the weight coefficients of each sub-control target are obtained in this paper, as shown in
Table 8.

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}