Hybrid Framework for Simulating Building Collapse and Ruin Scenarios Using Finite Element Method and Physics Engine


Abstract
:1. Introduction
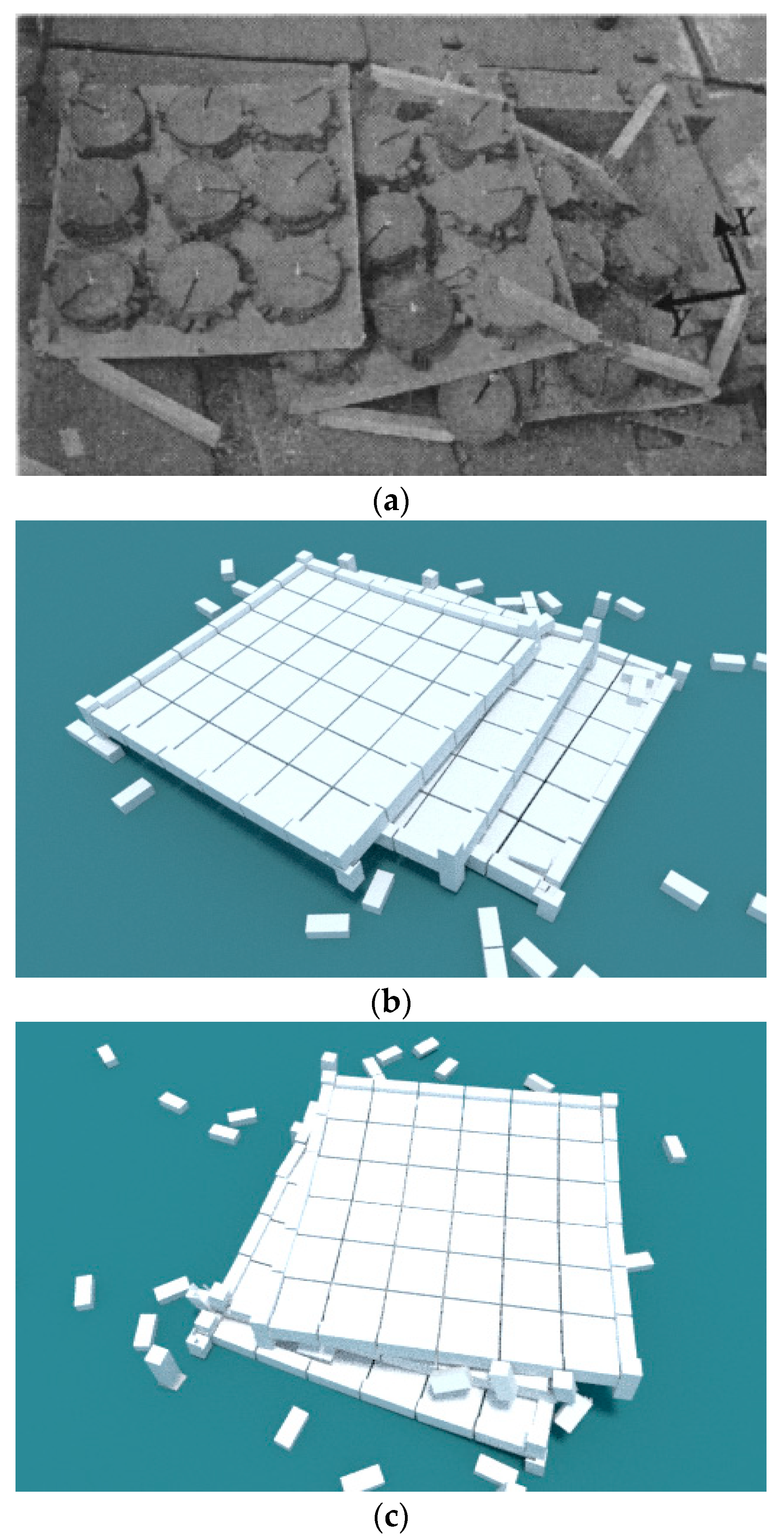
- Shaking table testShaking table tests have been used to study the ruin distribution in many studies [16,17,18,19,20]. For example, Huang [20] analyzed the collapse process and distribution of ruins using a ¼-scale shaking table test of a three-story reinforced concrete frame. In general, the structures used in such tests are highly simplified approximations of real-world structures. Owing to the high cost and limited experimental capacity of shaking table tests, small-scale models are often required, thereby limiting the reliability of the results.
- Numerical simulation methodsThe discrete element method (DEM) [21,22], applied element method (AEM) [15,23] and physics engines are the most common numerical simulation methods for ruin simulations. A physics engine is a piece of computer software, based on Newton’s laws of dynamics, that provides an approximate simulation of complex physical behaviors, such as rigid body dynamics (including collision detection), soft body dynamics and fluid dynamics. [24]. Some physics engines have a relatively low computational demand [25]. In recent years, physics engines have been widely used to simulate structural collapse and ruin distributions [26,27,28,29,30,31]. For example, Xu et al. [28] simulated seismic damage in urban areas, based on a multi-story concentrated-mass shear model and PhysX. Bullet Constraints Builder (BCB) [29] is a building collapse simulation software, which is developed based on the open-source physics engine Bullet [32] and Blender Python script. Bullet [32] is an open-source, real-time physics engine developed by Erwin Couman in 2003, which can simulate collision detection, and soft and rigid body dynamics. The BCB can simulate the dynamic behavior of structures at the large-deformation stage, and the distribution of ruins. Furthermore, the simulation results are generally consistent with ruin scenarios in real-world earthquake events [30].
2. Hybrid Framework Based on FE Method and Physics Engine
- Module 1: FE model establishment and conversionThe FE model of the target structure is established using the FE software MSC.Marc [33]. The geometric model is then converted into the rigid body model in Blender, using the geometry mapping function that is integrated into the Blender Python script “Finite Element Method to Rigid Body Dynamics (FEM2RBD)”. In the rigid body model, the elements are rigid bodies, and no internal stresses and strains are considered. The deformations of the reinforced concrete structures are considered via the constraints/springs among different rigid bodies [29].
- Module 2: Small deformation analysis and initial collapse moment determinationA nonlinear time history analysis is conducted using the FE model of the target building, to analyze the structural behavior during the small-deformation stage. Subsequently, the initial moment of collapse is determined, and the displacement and velocity data of each time step at, and before, the moment of initial collapse are extracted from the FE model. These data will be used in the large-deformation simulation based on the physics engine in Module 3 and the collapse process visualization in Module 4.
- Module 3: Data mapping and large deformation analysisBased on the mapping method of the FE results proposed in Section 3, the displacement and velocity data from the moment of initial collapse are mapped into the BCB geometric model, using the displacement and velocity mapping functions of FEM2RBD. Subsequently, this model is modified using several BCB processing functions, in the following order: (1) establish the rigid body ground; (2) remove the overlapping portions of rigid bodies; (3) map the remaining ground motion; (4) define the constraint parameters; and (5) build the constraints among rigid bodies. The analysis model used for the physics engine simulation can then be established [29]. After establishing this model, simulations are performed using the Bullet physics engine to determine the structural dynamic behavior during the large-deformation stage.
- Module 4: Data integration, rendering and visualizationAfter the large-deformation stage simulation, the render engines of Blender are used to render the data of the small and large-deformation stages. Subsequently, the rendered videos are integrated to visualize the entire structural collapse process.
3. Key Techniques
- Conversion of the geometric model from the FE method to the physics engine. The model in the physics engine-based simulation component is a rigid body spring model, the elements of which are significantly different from the elements of the FE model. Therefore, it is necessary to propose a method for converting the geometric data from the FE model to the physics engine
- Determination of the initial moment of collapse. To achieve the proposed hybrid framework, the switching moment (collapse keyframe) from the FE simulation to physics engine simulation needs to be determined based on the results of the FE simulation.
- Mapping the FE simulation data. After the FE simulation, the data computed for the small-deformation stage need to be mapped into the physics engine.
3.1. Geometric Model and Material Mapping Method
3.1.1. Solid Model Establishment Method in Blender
- Step 1: Shape and position transformation (including translation and rotation).The shape and position transformations are performed on the cube mesh provided in Blender [43], to create geometric objects with the same shapes and positions as the elements in the FE model. The rotation method shown in Figure 3 is used to model inclined elements in FE models. Specifically, the rotation angle is obtained by first determining the endpoint coordinates of the longest edge of an FE element (line segment l1) and the projection of l1 in the XOY plane in the global coordinate system (line segment l2). The angle α between l2 and the X axis, and the angle β between l2 and l1, are then calculated using these endpoint coordinates. Subsequently, the shape-transformed object is rotated by angle α around the Z axis in the global coordinate system. The object is then rotated by angle β around the Y’ axis in the rotated coordinate system. The rotated coordinate system is the local coordinate system of the cube after the first rotation, where the X’O’ axis is parallel to l2.
- Step 2: Add rigid bodies to the cubes.Convert the cubes into rigid bodies after the shape and position transformations to obtain the rigid body model for the Bullet physics engine simulation.
3.1.2. Material Mapping Method in the BCB
3.2. Determination of the Initial Moment of Collapse
3.3. FE Simulation Data Mapping Method
3.3.1. Displacement Mapping Method
- Step 1. Extract the FE model data. After the FE simulation, the displacement data of each vertex at each time step are extracted, and then the deformed coordinates of each vertex are calculated from the displacement data and the initial coordinates. The deformed centroid coordinates of each object at each time step can be calculated from the deformed vertex coordinates of each object.
- Step 2. Insert the displacement keyframe. Initially, the keyframe that corresponds to the first time step in the FE model on the Blender timeline is selected. The deformed centroid coordinates obtained from the FE results for one object are then calculated. Subsequently, the deformed centroid coordinates are inserted as the displacement keyframe. When all the objects in the structure have been processed, the simulation moves to the next time step, and the aforementioned procedure is repeated until the initial moment of collapse Tc.
- Step 3: Change the kinematic type. After Step 2, the kinematic type of each object needs to be converted to the animation system, otherwise the object motions will be controlled by the physics engine simulation, rather than by the FE result.
3.3.2. Velocity Mapping Method
- Step 1: Extract the FE results at time step tj, including velocity vj and displacement xj.
- Step 2: Obtain xvirtual using Equations (4) and (5), and set the displacement of the frame k to xvirtual.
- Step 3: At frame k, convert the kinematic type to the animation system, and then insert the displacement and kinematic type keyframes for each object. Convert the frame from frame k to frame j after the keyframe insertion at frame k. At frame j, convert the kinematic type to the physics engine system, and then insert the displacement and kinematic type keyframes for each object.
4. Validation and Case Study
4.1. Validation Using a 3D Shaking Table Test of a Three-Story Reinforced Concrete Frame
4.1.1. Basic Information
4.1.2. Comparison of Simulation Results
- For FE models, a convergence problem occurs during the collapse simulation; therefore, the distribution of ruins cannot be easily obtained.
- The BCB simulation method is not sufficiently accurate for the small-deformation stage. Therefore, the collapse mode and the distribution of ruins differ substantially from the test results.
- The proposed hybrid method achieves the most satisfactory simulation of the structural collapse mode and the distribution of ruins.
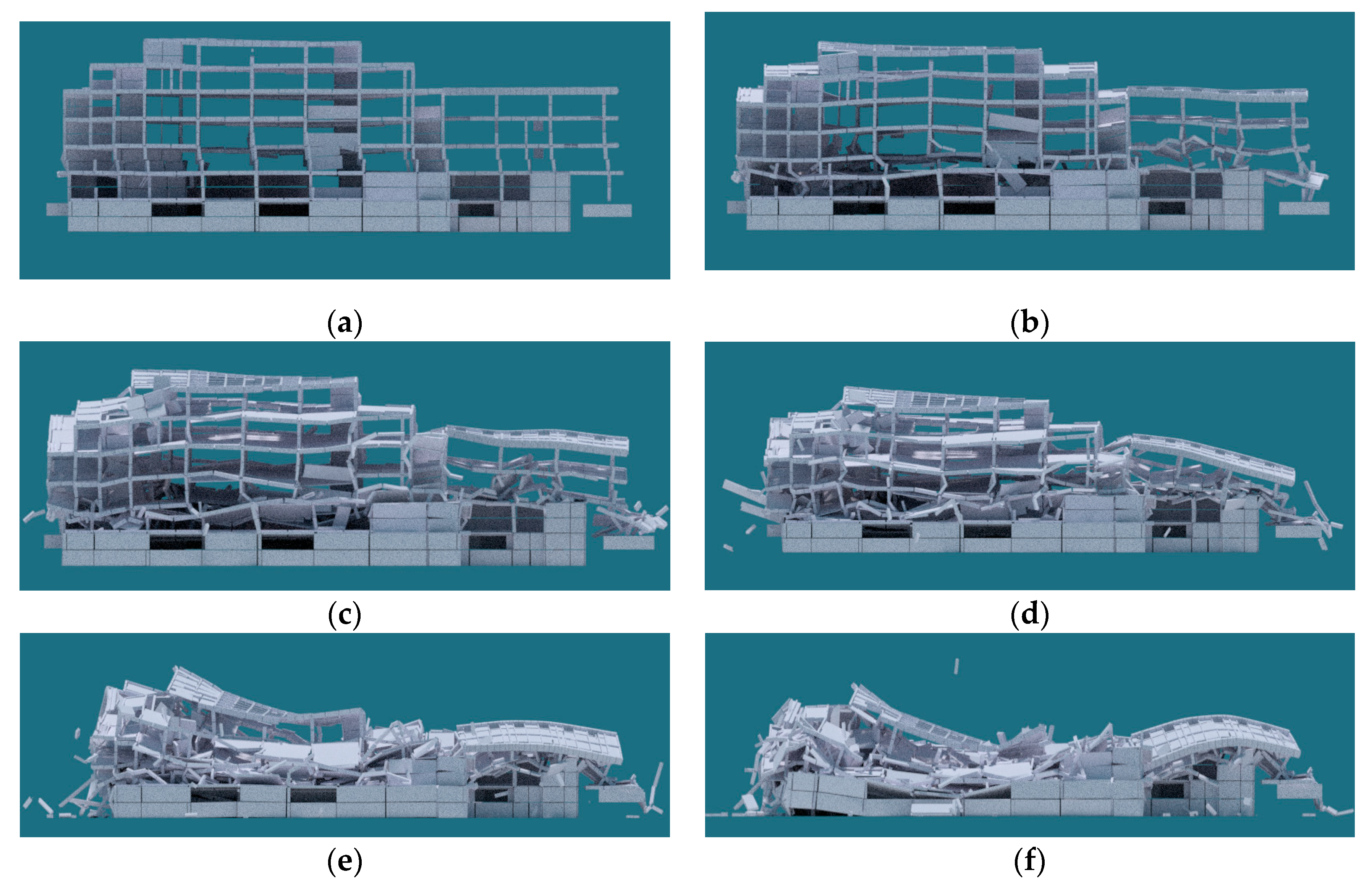
4.2. Collapse and Ruins Simulation of a Real-World Library Building
5. Conclusions
- In the proposed hybrid framework, the FE method simulates structural behaviors during the small-deformation stage, and the physics engine simulates structural behaviors during the large-deformation stage. The proposed framework efficiently combines the advantages of the FE method and the physics engine.
- Using a shaking table test of a three-story reinforced concrete frame, the proposed hybrid simulation method is demonstrated to be more accurate than an approach based on the physics engine alone. The case study of a real-world complex library building shows the high-fidelity of the collapse simulation.
- The collision of structural components and the distribution of ruins after the collapse are considered in the proposed hybrid method. The proposed framework has great significance for simulating building collapse and ruin scenarios for post-earthquake rescue training.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- de Bruycker, M.; Greco, D.; Annino, I.; Stazi, M.A.; de Ruggiero, N.; Triassi, M.; de Kettenis, Y.P.; Lechat, M.F. The 1980 earthquake in southern Italy: Rescue of trapped victims and mortality. Bull. World Heal. Organ. 1983, 61, 1021–1025. [Google Scholar]
- So, E.; Baker, H.; Spence, R. Casualty estimation through assessment of volume loss and external debris spread in building collapse. In Proceedings of the 16th European Conference on Earthquake Engineering, Thessaloniki, Greece, 18–21 June 2018. [Google Scholar]
- Tang, B.; Chen, Q.; Chen, X.; Glik, D.; Liu, X.; Liu, Y.; Zhang, L. Earthquake-related injuries among survivors: A systematic review and quantitative synthesis of the literature. Int. J. Disaster Risk Reduct. 2017, 21, 159–167. [Google Scholar] [CrossRef]
- Sun, X.; Liu, H.; Yang, C.; Wang, N. Virtual simulation-based scene modeling of helicopter earthquake search and rescue. In Proceedings of the AIP Conference Proceedings; AIP Publishing: New York, NY, USA, 2017; Volume 1839, p. 020140. [Google Scholar]
- Li, Y.; Lu, X.; Guan, H.; Ye, L. Progressive Collapse Resistance Demand of RC Frames under Catenary Mechanism. ACI Struct. J. 2014, 111. [Google Scholar] [CrossRef] [Green Version]
- Lu, X.; Lin, K.; Li, Y.; Guan, H.; Ren, P.; Zhou, Y. Experimental investigation of RC beam-slab substructures against progressive collapse subject to an edge-column-removal scenario. Eng. Struct. 2017, 149, 91–103. [Google Scholar] [CrossRef]
- Yang, T.; Han, Z.; Deng, N.; Chen, W. Collapse Responses of Concrete Frames Reinforced with BFRP Bars in Middle Column Removal Scenario. Appl. Sci. 2019, 9, 4436. [Google Scholar] [CrossRef] [Green Version]
- Chen, X.; Xie, W.; Xiao, Y.; Chen, Y.; Li, X. Progressive Collapse Analysis of SRC Frame-RC Core Tube Hybrid Structure. Appl. Sci. 2018, 8, 2316. [Google Scholar] [CrossRef] [Green Version]
- Feng, D.-C.; Kolay, C.; Ricles, J.M.; Li, J. Collapse simulation of reinforced concrete frame structures. Struct. Des. Tall Spéc. Build. 2015, 25, 578–601. [Google Scholar] [CrossRef]
- Lu, X.; Lu, X.; Guan, H.; Zhang, W.; Ye, L. Earthquake-induced collapse simulation of a super-tall mega-braced frame-core tube building. J. Constr. Steel Res. 2013, 82, 59–71. [Google Scholar] [CrossRef] [Green Version]
- Lu, X.; Lu, X.; Zhang, W.; Ye, L. Collapse simulation of a super high-rise building subjected to extremely strong earthquakes. Sci. China Ser. E Technol. Sci. 2011, 54, 2549–2560. [Google Scholar] [CrossRef]
- Xie, L.; Lu, X.; Guan, H.; Lu, X. Experimental Study and Numerical Model Calibration for Earthquake-Induced Collapse of RC Frames with Emphasis on Key Columns, Joints, and the Overall Structure. J. Earthq. Eng. 2015, 19, 1–25. [Google Scholar] [CrossRef]
- Lu, X.; Tian, Y.; Cen, S.; Guan, H.; Xie, L.; Wang, L. A High-Performance Quadrilateral Flat Shell Element for Seismic Collapse Simulation of Tall Buildings, and Its Implementation in OpenSees. J. Earthq. Eng. 2017, 22, 1662–1682. [Google Scholar] [CrossRef]
- Hartmann, D.; Breidt, M.; Nguyen, V.V.; Stangenberg, F.; Höhler, S.; Schweizerhof, K.; Mattern, S.; Blankenhorn, G.; Möller, B.; Liebscher, M. Structural collapse simulation under consideration of uncertainty—Fundamental concept and results. Comput. Struct. 2008, 86, 2064–2078. [Google Scholar] [CrossRef]
- Grunwald, C.; Khalil, A.; Schaufelberger, B.; Ricciardi, E.M.; Pellecchia, C.; de Iuliis, E.; Riedel, W. Reliability of collapse simulation—Comparing finite and applied element method at different levels. Eng. Struct. 2018, 176, 265–278. [Google Scholar] [CrossRef]
- Gu, X.-L.; Yu, Q.-Q.; Li, Y.; Lin, F. Collapse Process Analysis of Reinforced Concrete Super-Large Cooling Towers Induced by Failure of Columns. J. Perform. Constr. Facil. 2017, 31, 04017037. [Google Scholar] [CrossRef]
- Lignos, D.G.; Hikino, T.; Matsuoka, Y.; Nakashima, M. Collapse Assessment of Steel Moment Frames Based on E-Defense Full-Scale Shake Table Collapse Tests. J. Struct. Eng. 2013, 139, 120–132. [Google Scholar] [CrossRef]
- Wu, C.L.; Loh, C.H.; Yang, Y.S. Shake Table Tests on Gravity Load Collapse of Low-Ductility RC Frames Under near-Fault Earthquake Excitation. Adv. Exp. Struct. Eng. 2006, 725–732. Available online: http://www.cc.ntut.edu.tw/~ysyang/publications/aese2005/T087.PDF (accessed on 22 May 2020).
- Lu, Z.; Chen, X.; Lu, X.; Yang, Z. Shaking table test and numerical simulation of an RC frame-core tube structure for earthquake-induced collapse. Earthq. Eng. Struct. Dyn. 2016, 45, 1537–1556. [Google Scholar] [CrossRef]
- Huang, Q. Study on Spatial Collapse Responses of Reinforced Concrete Frame Structures under Earthquake. Ph.D. Thesis, Tongji University, Shanghai, China, 2006. [Google Scholar]
- Gu, X.; Wang, X.; Yin, X.; Lin, F.; Hou, J. Collapse simulation of reinforced concrete moment frames considering impact actions among blocks. Eng. Struct. 2014, 65, 30–41. [Google Scholar] [CrossRef]
- Lu, Z.; He, X.; Zhou, Y. Discrete element method-based collapse simulation, validation, and application to frame structures. Struct. Infrastruct. Eng. 2017, 14, 538–549. [Google Scholar] [CrossRef]
- Salem, H.; El-Fouly, A.; Tagel-Din, H. Toward an economic design of reinforced concrete structures against progressive collapse. Eng. Struct. 2011, 33, 3341–3350. [Google Scholar] [CrossRef]
- Millington, I. Game Physics Engine Development; Informa UK Limited: London, UK, 2007. [Google Scholar]
- He, H.; Zheng, J.; Sun, Q.; Li, Z. Simulation of Realistic Particles with Bullet Physics Engine. In Proceedings of the E3S Web of Conferences; EDP Sciences: Les Ulis, France, 2019; Volume 92, p. 14004. [Google Scholar]
- Xu, Z.; Lu, X.; Guan, H.; Ren, A. Physics engine-driven visualization of deactivated elements and its application in bridge collapse simulation. Autom. Constr. 2013, 35, 471–481. [Google Scholar] [CrossRef] [Green Version]
- Zhou, B.; Jia, Q.; Chen, Z. The Research and Development of the Earthquake Ruins Computer Aided Design System for Rescue Training. In Proceedings of the 2017 4th International Conference on Information Science and Control Engineering (ICISCE); Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2017; pp. 1303–1307. [Google Scholar]
- Xu, Z.; Lu, X.; Guan, H.; Han, B.; Ren, A. Seismic damage simulation in urban areas based on a high-fidelity structural model and a physics engine. Nat. Hazards 2013, 71, 1679–1693. [Google Scholar] [CrossRef] [Green Version]
- Oliver, W.; Kostack, K. Final Release of the Blender and Bullet Physics Engine Based on Fast On-Site Assessment Tool. Available online: https://inachuslaurea.files.wordpress.com/2019/07/inachus_d3.5_luas_v1.0.pdf. (accessed on 23 May 2020).
- Kostack Studio. Christchurch Earthquake Simulation & Pyne Gould Building Collapse (Inachus). Available online: https://www.youtube.com/watch?v=TCJq_2-q34k&t=24s. (accessed on 23 May 2020).
- Hamano, T.; Onosato, M.; Tanaka, F. Performance comparison of physics engines to accelerate house-collapsing simulations. In Proceedings of the 2016 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Lausanne, Switzerland, 23–27 October 2016; pp. 358–363. [Google Scholar] [CrossRef]
- Boeing, A.; Bräunl, T. Evaluation of real-time physics simulation systems. In Proceedings of the 5th International Conference on Technological Ecosystems for Enhancing Multiculturality—TEEM 2017; Association for Computing Machinery (ACM): New York, NY, USA, 2007; pp. 281–288. [Google Scholar]
- MSCSoftware. Marc. Available online: https://www.mscsoftware.com/product/marc (accessed on 23 May 2020).
- Lin, X.; Kato, M.; Zhang, L.; Nakashima, M. Quantitative investigation on collapse margin of steel high-rise buildings subjected to extremely severe earthquakes. Earthq. Eng. Eng. Vib. 2018, 17, 445–457. [Google Scholar] [CrossRef]
- Lu, X.; Guan, H.; Ye, L. Collapse simulation of reinforced concrete high-rise building induced by extreme earthquakes. Earthq. Eng. Struct. Dyn. 2012, 42, 705–723. [Google Scholar] [CrossRef] [Green Version]
- Jeng, V.; Tzeng, W. Assessment of seismic pounding hazard for Taipei City. Eng. Struct. 2000, 22, 459–471. [Google Scholar] [CrossRef]
- Bazan, E.; Bielak, J. Earthquake Response of Nonlinear Building-Foundation Systems. Soil-Struct. Interact. 1987, 43, 13–24. [Google Scholar] [CrossRef]
- Anajafi, H.; Medina, R.A. Lessons Learned from Evaluating the Responses of Instrumented Buildings in the United States: The Effects of Supporting Building Characteristics on Floor Response Spectra. Earthq. Spectra 2019, 35, 159–191. [Google Scholar] [CrossRef]
- Léger, P.; Dussault, S. Seismic? Energy Dissipation in MDOF Structures. J. Struct. Eng. 1992, 118, 1251–1269. [Google Scholar] [CrossRef]
- Anajafi, H.; Medina, R.A.; Santini-Bell, E. Effects of the improper modeling of viscous damping on the first-mode and higher-mode dominated responses of base-isolated buildings. Earthq. Eng. Struct. Dyn. 2019, 49, 51–73. [Google Scholar] [CrossRef]
- Charney, F.A. Unintended Consequences of Modeling Damping in Structures. J. Struct. Eng. 2008, 134, 581–592. [Google Scholar] [CrossRef]
- Chopra, A.K.; McKenna, F. Modeling viscous damping in nonlinear response history analysis of buildings for earthquake excitation. Earthq. Eng. Struct. Dyn. 2015, 45, 193–211. [Google Scholar] [CrossRef]
- Blender. Blender 2.82 Manual. Available online: https://docs.blender.org/manual/en/latest/index.html (accessed on 23 May 2020).
- National Standard of the People’s Republic of China. Code for Seismic Design of Building (GB50011-2010); China Architecture and Building: Beijing, China, 2010.
- Federal Emergency Management Agency. Prestandard and Commentary for the Seismic Rehabilitation of Buildings (FEMA 356); Federal Emergency Management Agency: Washington, DC, USA, 2000.
- Zhao, P.; Yu, X.; Lu, X. Collapse capacity assessment of RC frame structures using explicit algorithm. Eng. Mech. 2020, 37, 77–87. [Google Scholar] [CrossRef]
- Lu, X.; Jiang, Q.; Miao, Z. Elasto-Plastic Analysis of Buildings Against Earthquake, 2nd ed.; China Architecture & Building Press: Beijing, China, 2015. [Google Scholar]
- Shi, W.; Ye, L.; Lu, X.; Tang, D.Y. Study on the collapse-resistant capacity of RC frames with different seismic fortification levels. Eng. Mech. 2011, 28, 41–48. [Google Scholar]
- Villaverde, R. Methods to Assess the Seismic Collapse Capacity of Building Structures: State of the Art. J. Struct. Eng. 2007, 133, 57–66. [Google Scholar] [CrossRef] [Green Version]
- Erwin, C. Bullet Physics Simulation Introduction to Rigid Body Dynamics and Collision Detection. Available online: https://docs.google.com/presentation/d/1-UqEzGEHdskq8blwNWqdgnmUDwZDPjlZUvg437z7XCM/edit?usp=sharing (accessed on 23 May 2020).
- Lu, X.; Li, M.; Guan, H.; Lu, X.; Ye, L. A comparative case study on seismic design of tall RC frame-core-tube structures in China and USA. Struct. Des. Tall Spéc. Build. 2015, 24, 687–702. [Google Scholar] [CrossRef] [Green Version]
- Asce Minimum Design Loads for Buildings and Other Structures. Minimum Design Loads for Buildings and Other Structures; American Society of Civil Engineers: Reston, VA, USA, 2013. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Floor No. | Ec (GPa) | fc (MPa) |
|---|---|---|
| 1 | 25 | 22.5 |
| 2 | 27 | 23.9 |
| 3 | 23 | 15.6 |
| Table | Es (GPa) | fs (MPa) |
|---|---|---|
| 16# | 200 | 486.4 |
| 10# | 200 | 457.7 |
| Load Case | Peak Ground Acceleration (PGA) (Unit: g) | ||
|---|---|---|---|
| X-Direction | Y-Direction | Z-Direction | |
| 1 | 0.10 | 0.08 | 0.06 |
| 2 | 0.36 | 0.32 | 0.28 |
| 3 | 0.84 | 0.55 | 0.54 |
| 5 | 0.93 | 1.19 | 0.57 |
| Element | Member Location | Strength of Concrete (MPa) | Size of Elements (m) |
|---|---|---|---|
| Walls | 1st floor | 40 | 8 × 2.25~2 × 2.25 |
| 2nd floor | 40 | 8 × 2.07~2 × 2.07 | |
| Others | 35 | 8 × 2~2.5 × 2 | |
| Beams | 1st floor | 40 | 4~1.25 |
| 2nd floor | 40 | 4~0.707 | |
| Others | 35 | 4~0.707 | |
| Columns | 1st floor | 40 | 2.25 |
| 2nd floor | 40 | 2.07 | |
| Others | 35 | 2 | |
| Slabs | All floors | elastic | 8 × 7.45~2 × 1.5 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zheng, Z.; Tian, Y.; Yang, Z.; Lu, X. Hybrid Framework for Simulating Building Collapse and Ruin Scenarios Using Finite Element Method and Physics Engine. Appl. Sci. 2020, 10, 4408. https://doi.org/10.3390/app10124408
Zheng Z, Tian Y, Yang Z, Lu X. Hybrid Framework for Simulating Building Collapse and Ruin Scenarios Using Finite Element Method and Physics Engine. Applied Sciences. 2020; 10(12):4408. https://doi.org/10.3390/app10124408
Chicago/Turabian StyleZheng, Zhe, Yuan Tian, Zhebiao Yang, and Xinzheng Lu. 2020. "Hybrid Framework for Simulating Building Collapse and Ruin Scenarios Using Finite Element Method and Physics Engine" Applied Sciences 10, no. 12: 4408. https://doi.org/10.3390/app10124408