1. Introduction
The automobile is a typical complex system. Many parts of a vehicle are involved in the research of vehicle dynamics, and the performance of each part affects the performance of the whole vehicle in varying degrees [
1]. An automobile system can be divided into several small systems. Overall vehicle performance can be improved by enhancing each small system from the perspective of reductionism. For cars, they should be regarded as a large system, and all their parts should be analyzed in a unified way. Moreover, a unified and global implementation scheme should be proposed and subsequently implemented to each subsystem holistically. The chassis system is an important assembly in automobiles that involves suspension, steering, braking, driving, and other subsystems with coupling relationship.
The extensive use of underlying controllers may lead to functional conflicts between different chassis controllers and result in unnecessary expenses and the reduction of the control effect in the wide use of control systems and control technologies. Active control technology can greatly improve the control performance of all parts of the chassis system [
2]. In 2006, a nonlinear constrained optimal allocation control method was proposed on the basis of the tire force distribution method and concept of friction circle [
3]. Wang et al. studied a hierarchical integrated control method for vehicle dynamics in which a sliding mode controller is used to obtain the total longitudinal force, total lateral force, and total yaw moment of a vehicle in the upper control layer; this approach distributes the force and torque of the body to the longitudinal slip ratio and side slip angle of the four tires [
4]. Roshanbin A and Naraghi M studied and designed a vehicle integrated control framework that comprehensively considers the control actuators of each system and proposed the concept of vehicle dynamics integrated control. The concept skips the traditional idea of electronic control system design and involves function based on control structure [
5]. A logic control of active front wheel steering (AFS) and electronic stability system was studied by Hwang et al. in 2008 [
6]. Tin Lun Lam et al. established a coordinated control method for four-wheel driving force that is mainly used in four-wheel independent driving and four-wheel independent steering structures to minimize the energy loss of vehicle systems while improving their overall stability [
7]. Tin Lun Lam et al. also studied a new four-wheel angle assignment method for four-wheel independent steering electric vehicles by minimizing tire slip [
8]. Tjonnas Johannes and Johansen Tor A used a hierarchical control system in which the maximum friction coefficient between the wheel and the road surface is adaptively controlled to minimize the output force of the controller [
9]. A nonlinear vehicle dynamics model integrated with AFS, electronic stability control (ESC), and variable torque distribution was established by Elmarakbi Ahmed et al. [
10]. A chassis control algorithm based on differential braking, front/rear traction torque, and active yaw moment control was proposed by Her Hyundong et al. The results indicate that the control effect of the chassis control system is better than that of a sole bottom plate control system and that it can maximize speed and vehicle steering lateral stability [
11,
12]. Through coordinated control with AFS, ESC, and active rear-wheel steering, Yim Seongjin observed the interaction among systems by using a variety of combinations and distributed wheel tire control force on the basis of inverse weighted pseudo control allocation. The Plackett–Burman method was used to analyze the sensitivity and check the influence of variable weights [
13].
In the field of chassis control, suspension has been used to improve comfort. However, with the emergence of semiactive suspension and active suspension, the need to establish the status of suspension control with consideration of ride comfort and stability has increased. Passive suspension control cannot be adjusted in real time, hence the availability of active and semiactive suspension control in the field of suspension control. Semiactive suspension can achieve ride comfort control similar to that of active suspension but with minimal power consumption [
14,
15]; it is thus the most widely used and applicable controllable suspension system [
16]. The concept of sky-hook damping “on-off” control with semiactive suspension was first proposed by Karnopp in 1974. Sky-hook control can improve ride comfort but handling stability inevitably deteriorates [
17]. In 1983, Toyota developed a semiactive suspension vehicle (Toyota Soarer 280GT) equipped with three adjustable working conditions. In 1989, semiactive control was combined with active control in Ford’s Thunderbird, and the combination surpassed passive suspension in terms of ride comfort and handling stability [
18]. In 1997, VALÁŠEK M et al. proposed a ground-hook control algorithm to improve handling stability further [
19]. Continuous damping control (CDC) technology of ZF Sachs is based on proportional valve control. Damping control is achieved by changing the damper aperture at a high corresponding frequency with CDC [
20]. The new Audi A6 allroad Quattro technology combines CDC technology with air suspension technology to realize adaptive control. A similar adaptive control technology is Hydractive, which was proposed by Citroen [
21].
With the maturity of semiactive suspension technology, semiactive control has been integrated into chassis systems. The linear quadratic Gaussian (LQG) method for integrated control of suspension and steering system was adopted by Harada m et al. to analyze lateral stability of vehicle [
22]. Yoshimura and Emoto developed a hierarchical integrated control of steering and active suspension systems; the strategy effectively solves the problem of steering effect on the active suspension actuator force and significantly improves the ride comfort and handling performance of vehicles [
23]. Gaspar P et al. designed a robust controller for active suspension by using the hybrid μ synthesis method [
24]. Fan Yu added a central differential brake to the integrated control of active yaw and active traction distribution to study the effects of front and rear axle load transfer on lateral stability [
25]. In 2008, an experiment on a hybrid vehicle console frame was performed on dSPACE [
26]. Yoon et al. designed an index called RI to prevent rollover, characterize rollover risk, and reduce the use of ESC [
27]. On the basis of this RI, a model-based state estimator was designed and used to suppress roll motion caused by maneuvers and road disturbances [
28]. In 2009, Kangwon Lee presented a method involving the use of the derivative of yaw rate to control CDC and thereby integrate ESC and CDC [
29]. A double-layer control strategy between suspension, steering, and braking systems was proposed to improve the performance of vehicles under different driving conditions. On the basis of integral sliding mode control theory, the control modes under different working conditions were switched according to the monitoring and identification of states [
30,
31]. Zhang Xinjie et al. regarded the ride comfort and handling stability of vehicles as functions of vehicle speed and road driving conditions and proposed the control principle of hybrid suspension based on vehicle speed and road conditions [
32]. Her Hyundong et al. proposed a three-step integrated chassis control algorithm with braking force, active rolling moment, and damping coefficient distributed [
33]. Mazlan Saiful Amri et al. used linear quadratic regulator and LQG optimal control theory to design an active lateral stabilizer bar to reduce vehicle roll angle and roll angle rate [
34].
Vehicle dynamics management (VDM) offers great advantages, including the reduction of sensors and system complexity. It can also eliminate interference conflicts between various systems while achieving global optimal performance. Given the complexity of centralized control models, design difficulties, and low universality, the coordinated control method is mainly used for integrated design in VDM. The control of a chassis system should be based on system theory, and the design of the subsystem controller should be combined with the design of the whole chassis controller to obtain the best control performance for the chassis system. Considering the complexity of the vehicle chassis system, the current work takes CDC suspension as the research object on the basis of VDM to improve and optimize the overall control performance for vehicle chassis systems.
This paper comprises five parts: introduction, basic handling stability control strategy of electronic stability program (ESP), design of multi-objective fuzzy continuous damping controller, simulation and result analysis, and conclusion. In
Section 1, the research background and research status are introduced, and a brief overview of the overall layout of the paper is presented.
In
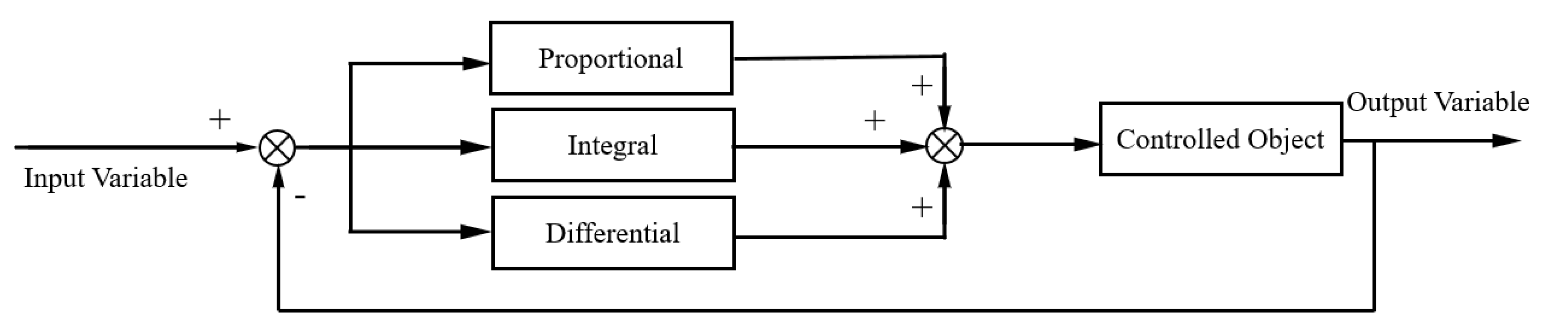
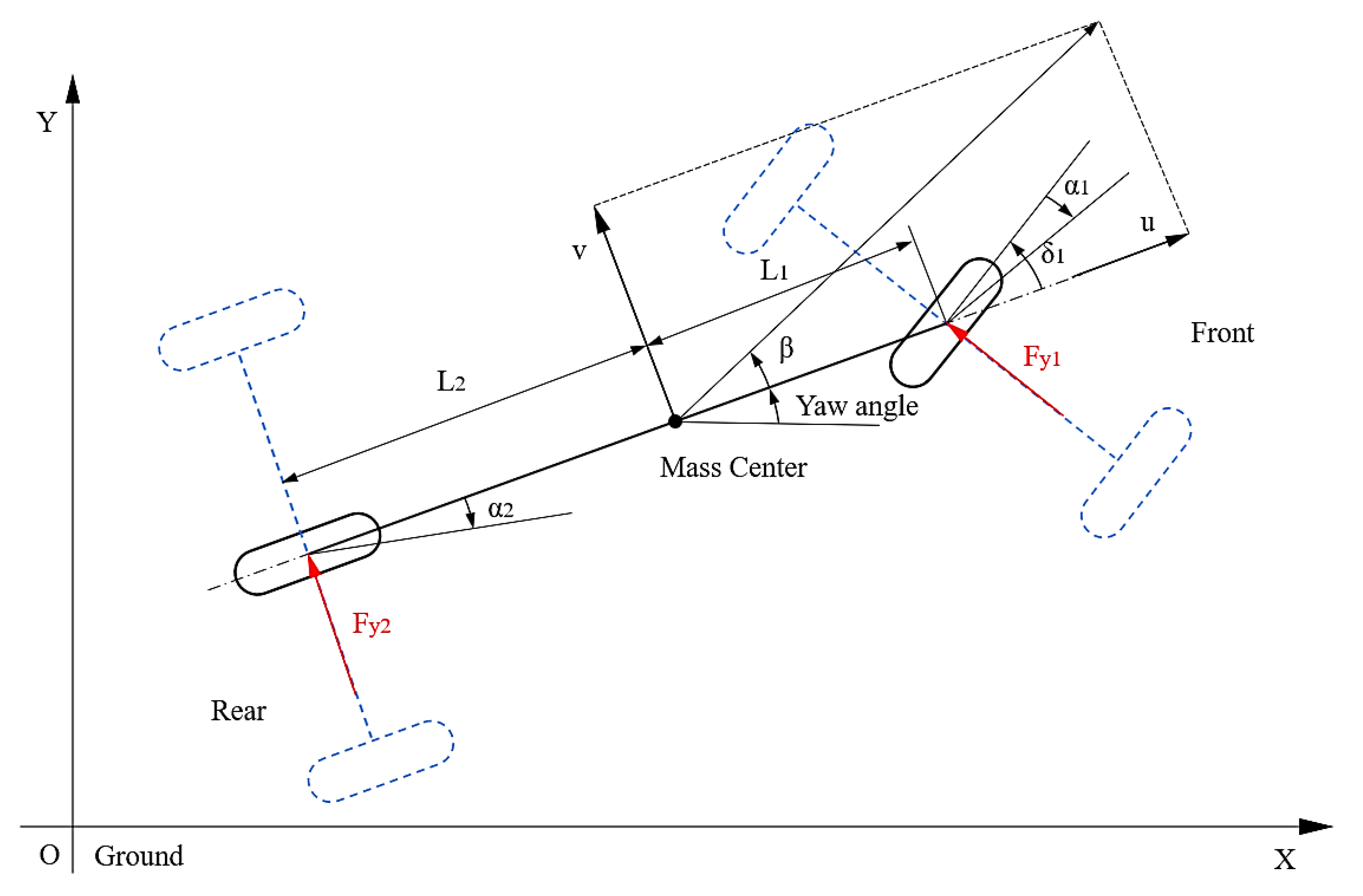
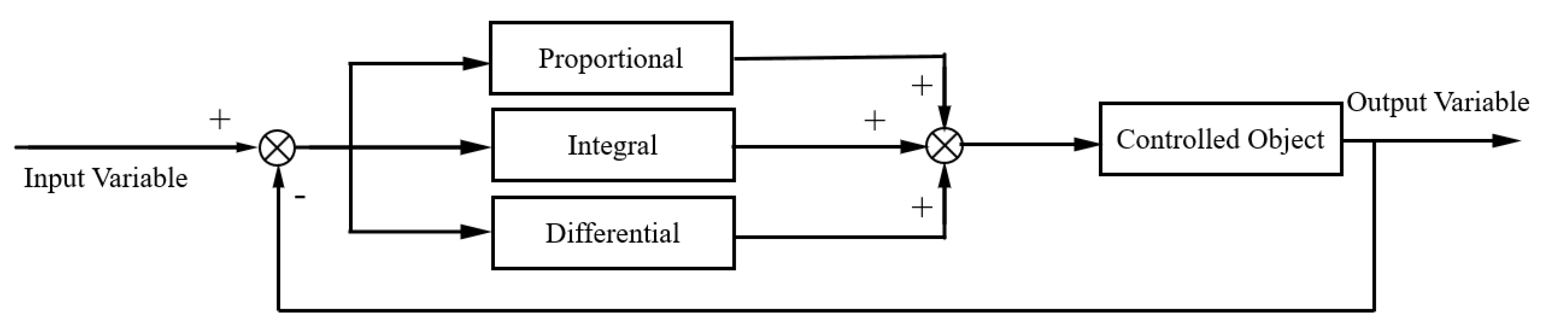
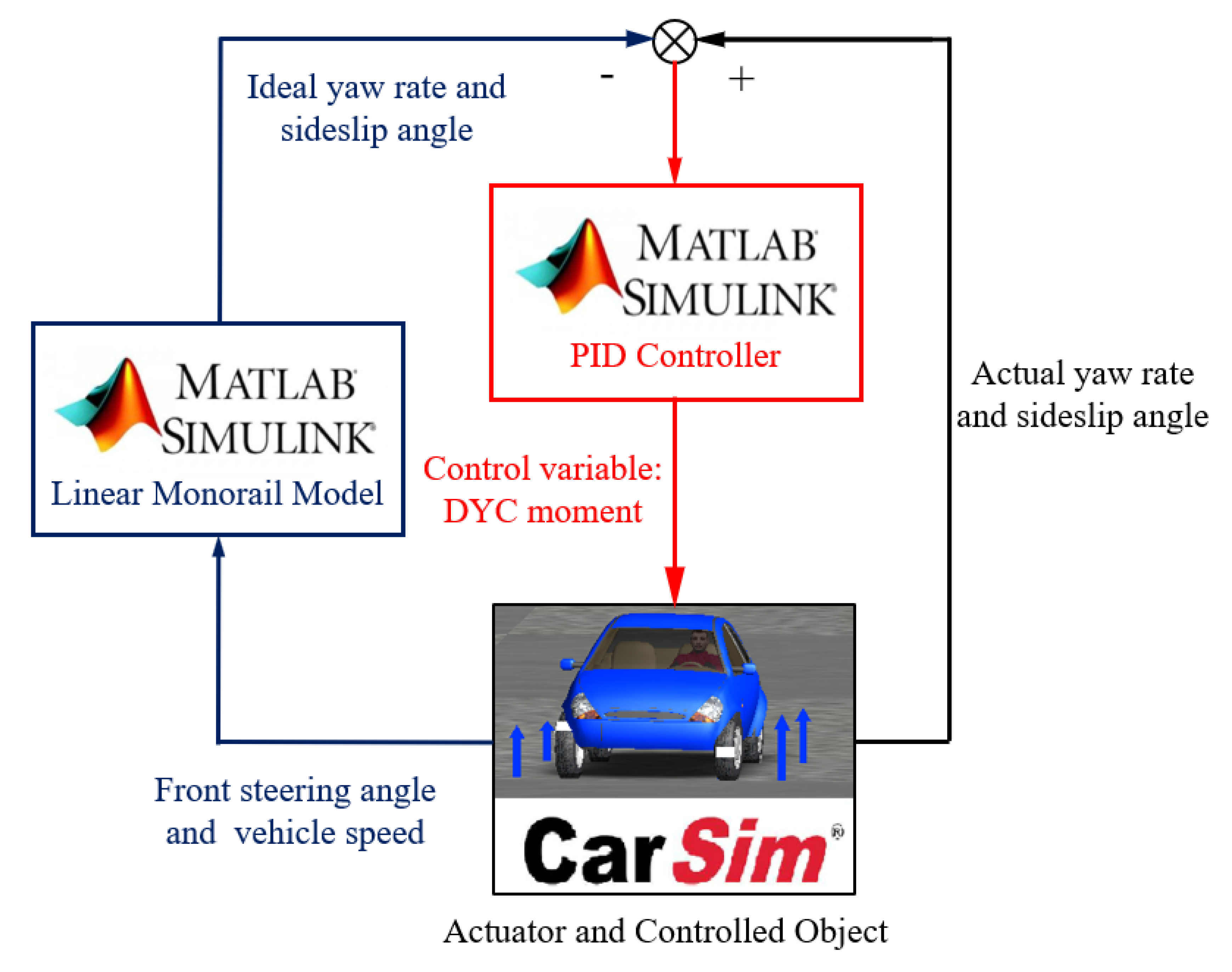
Section 2, the state space expression of lateral stability control is given by studying the control mechanism of the ESP. The ideal yaw angle rate and sideslip angle of the mass center are calculated by deriving the ideal monorail model with two degrees freedom. Finally, a direct yaw moment proportional–integral–differential (PID) control strategy based on yaw rate and centroid sideslip angle is proposed.
In
Section 3, the multi-objective fuzzy continuous damping controller based on ESP is proposed to achieve sky-hook control and thereby ensure passenger comfort while preventing rollover. The effect of the ESP can be improved by redistributing the vertical force at the same time.
In
Section 4 and
Section 5, the effect of the multi-objective fuzzy continuous damping control strategy is analyzed and verified through a sine wave steer input test, double line change (DLC) test, and fishhook test. The simulation results show that the multi-objective fuzzy control strategy is successful. The strategy can ensure the comfort of passengers under good driving conditions while ensuring strong adaptability and control effect under dangerous and extreme working conditions.
3. Design of Multi-Objective Fuzzy Continuous Damping Controller
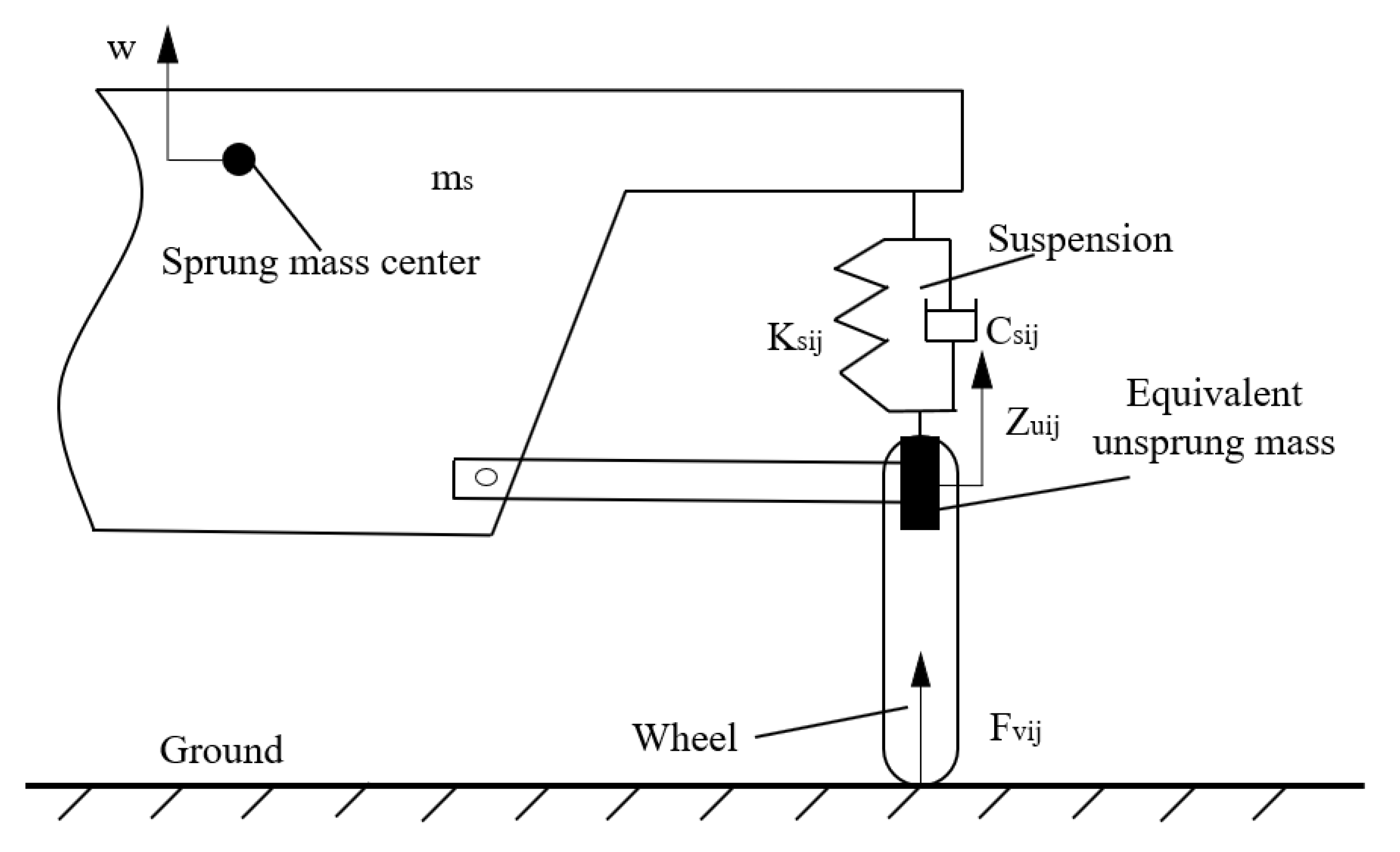
CDC suspension can guarantee the comfort of passengers under good level road conditions. The damping forces in the suspension can be changed through the control function of CDC suspension. This step can reduce the vehicle roll degree and change the vertical load distribution of the vehicle so as to aid the ESP. The vertical force on the suspension of each wheel can be expressed by the following equations, and the suspension model is shown in
Figure 4.
where
Fvij is the vertical force of each wheel;
p, q are the roll angle rate and pitch angle rate of the vehicle, respectively;
w is the vertical speed of the vehicle;
φ, θ are the roll angle and pitch angle of the vehicle;
Ksij, Kuij are the stiffness coefficients of spring and wheel of each wheel, respectively;
Csij, Cuij are the damping coefficients of the shock absorber and wheel, respectively;
Zuij is the unsprung mass displacement of each wheel;
Bj is the wheel distance of each axle; subscript
i (
l or r) indicates the left or right side.
The DYC moment can be written as:
where
Fbij is the braking force of each wheel (direction back is positive).
The braking force is constrained by the adhesion of the ground:
where
Fyij is the lateral force of each wheel.
The previous equations indicate that CDC can change the adhesion by changing the vertical force of the ground, thereby increasing the threshold range of the braking force.
3.1. Control Objectives and Strategies
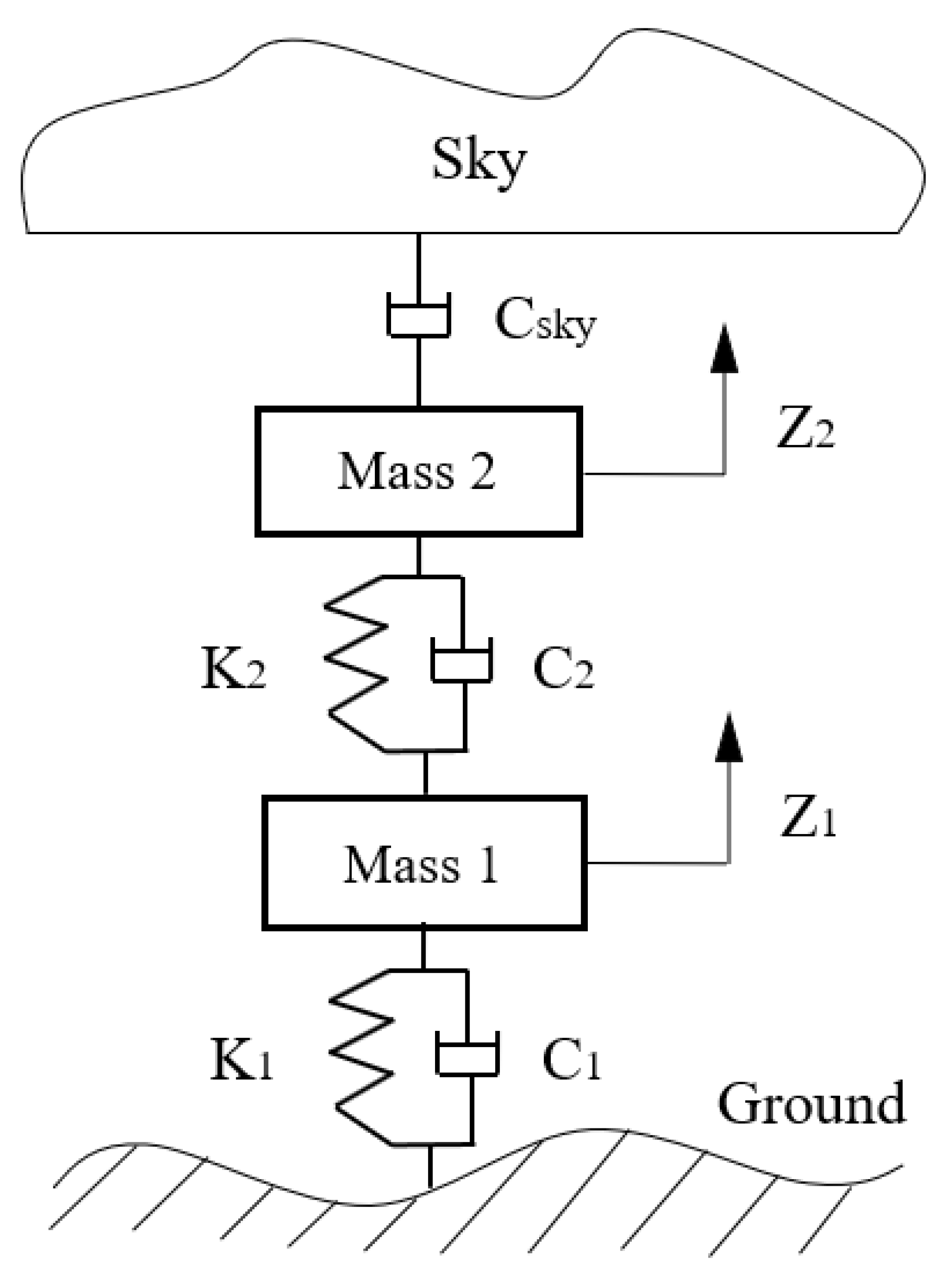
3.1.1. Sky-Hook Control
Sky-hook control assumes that two ends of the damper are not fixed between two masses; instead, it assumes that one end is fixed on one mass and that the other end is fixed in the sky. In this way, the sky-hook shock absorber does not have the opposite effect on both masses at the same time (
Figure 5).
CDC is a semiactive suspension with real-time control of damping force. The power of the CDC shock absorber must be positive under the theory of semiactive suspension. Given the absence of an external energy injection in semiactive suspension, the form of CDC energy transfer can only be from mechanical energy into thermal energy; it can be written as
where the function Sign(
x) is described as:
where
PDij-CDC is the power of the CDC shock absorber of each wheel,
FDij-CDC is the force of the CDC shock absorber of each wheel,
CDij-roll is the damping coefficient of the CDC shock absorber of each wheel,
ZDij is the displacement of the shock absorber of each wheel, and
x is a variable.
Sky-hook damping control provides a damping force opposite to the sprung mass speed in real time. Hence, it can produce minimal spring mass vibration and ensure the comfort of passengers to the maximum extent.
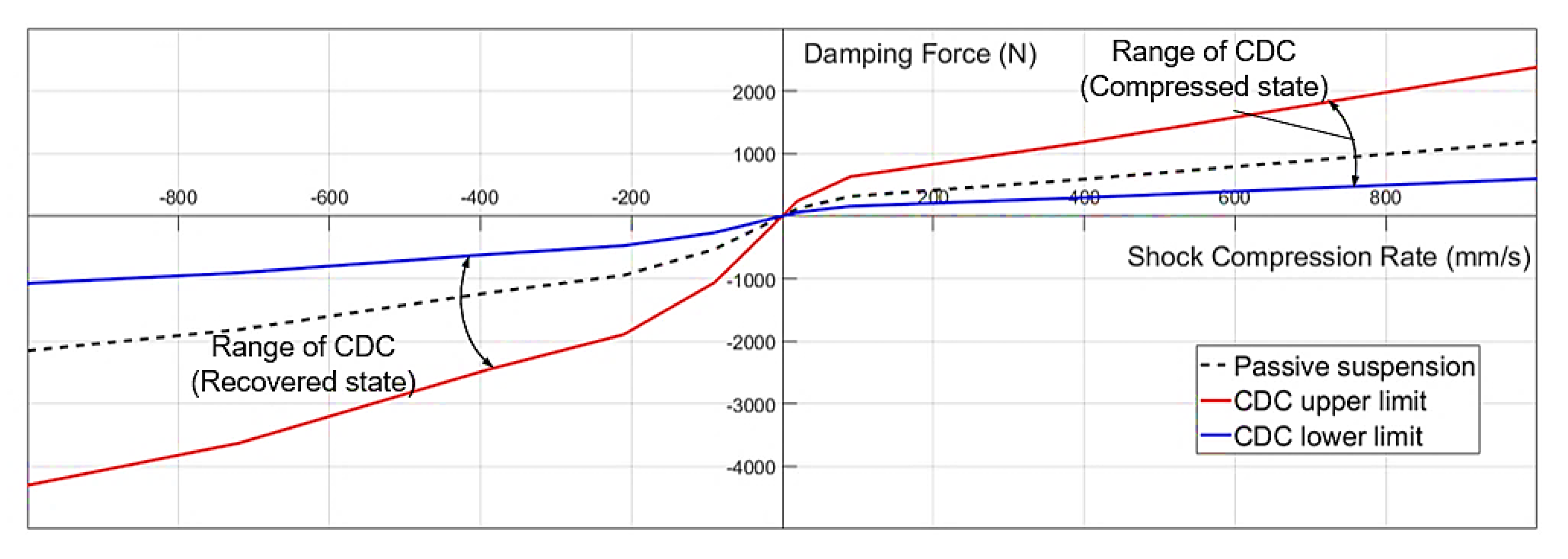
In addition to the fact that CDC has no external energy constraint, it is affected by its own external characteristics, and it has maximum and minimum damping force limits (
Figure 6).
3.1.2. Antirollover Control
When a vehicle is rolling, its lateral load transfer ratio (LTR) can be expressed by the vertical force; it is given by [
37]
LTR is an indicator of vehicle rollover risk and is defined as the proportion of the difference between the vertical load of the left and right wheels in the total vehicle mass. LTR varies from −1 to 1 regardless of the working condition of the vehicle. When the vehicle runs in a straight line, the vertical loads of the left and right wheels are the same, and the LTR is equal to 0. When the vehicle turns, the vertical force of one wheel transfers to the other side, and the LTR value gradually increases or decreases. When one side of the wheel is off the road, the LTR value reaches 1 or −1. This rollover evaluation method can achieve accurate rollover prediction when one side of the wheel leaves the ground at the same time.
3.2. Multi-Objective Fuzzy Continuous Damping Controller
Fuzzy control has a weak dependence on mathematical model, so it is widely used in uncertain or nonlinear control systems [
38,
39,
40]. Compared with some traditional control techniques, it has a certain degree of intelligence and has strong robustness to parameter changes. In recent years, there are many researches on fuzzy control in the field of damping control [
41,
42,
43]. A multi-objective fuzzy continuous damping controller is constructed to realize vehicle stability control under constraint control with stability and antirollover control.
The damping forces of the sky-hook damping control are calculated under any working condition. When other conditions requiring control arise, the force generated by fuzzy control is added to the damping force of sky-hook damping control.
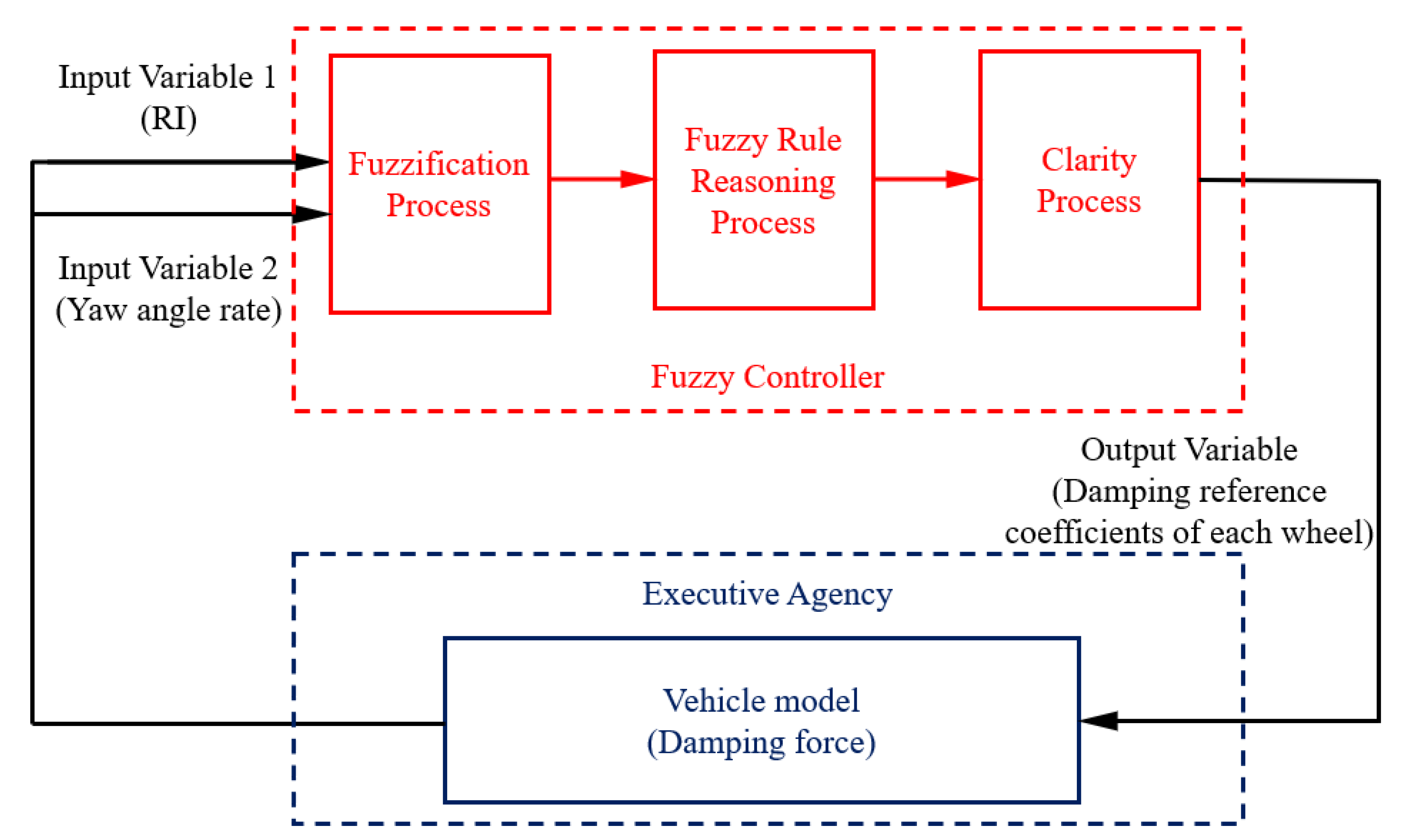
Fuzzy inference controller is mainly divided into three parts: fuzzification process, fuzzy rule reasoning process, and clarity process [
44]. The fuzzy control structure of this work is shown in
Figure 7.
3.2.1. Fuzzification Process
The main function of fuzzification is to process accurate variables and transform them into corresponding universe to form fuzzy variables.
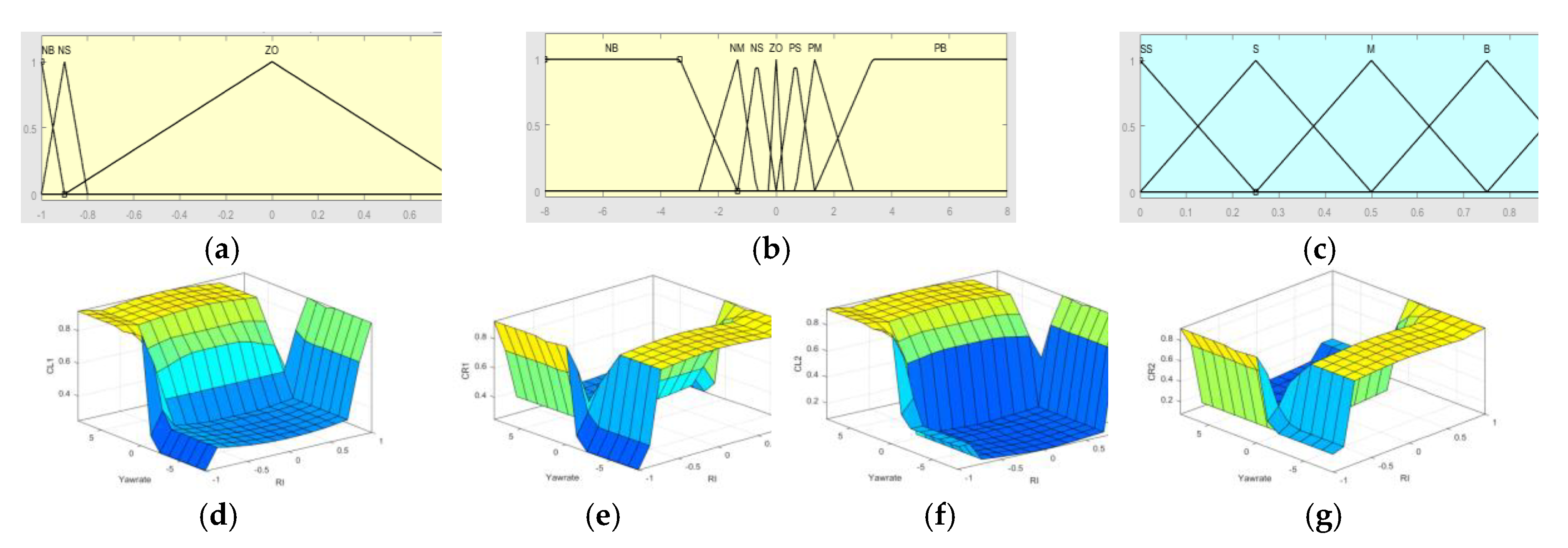
The inputs of fuzzy control are rollover index (RI; i.e., the value of the LTR mentioned previously) and yaw angle rate. The outputs are the damping reference coefficients of each wheel that generates a corresponding damping force through PID control. The objective is to reduce the vibration of passengers under normal driving conditions and to achieve stability and rollover control in the case of rollover or instability.
The process of fuzzification needs to complete the operation of accurate clear quantity into fuzzy quantity. The fuzzy universe of each variable should be defined at first, which can realize the transformation from physical clarity to fuzziness by quantization factors. The fuzzy universe of RI is defined as [−1, +1], the fuzzy universe of yaw angle rate is defined as [−8, +8] and the fuzzy universes of the damping reference coefficients of each wheel are defined as [0, +1]. In order to correspond the actual variables to the normalized universe, the quantization factors are defined as NRI = 1, Nyaw = 8/|rmax|, Nu = 1.
Taking RI as an example, the fuzzy language variable is used to describe the input variable RI [
45]. After fuzzifying, the fuzzy set
T(RI) of the RI can be expressed as
Similarly, fuzzy sets of the yaw angle rate and the damping reference coefficient can be obtained.
The fuzzy set
T(r) of the yaw angle rate can be expressed as
The fuzzy set
U(dc) of the damping reference coefficient of each wheel can be expressed as
3.2.2. Fuzzy Rule Reasoning Process
The triangular membership function is easy to operate on the premise of meeting the accuracy requirements and it is more conducive to simulation; the language variables are almost all triangular membership functions (NB and PB of the yaw angle rate are trapezoidal membership functions).
The expression of triangular membership function is
where
a2 is the vertex coordinate value of the triangle;
a1 and
a3 are the intersection coordinates of the left and right sides of the triangle and the bottom edge, respectively.
The input and output variables and the rules of fuzzy control are shown in
Figure 8.
The basic idea of multi-objective fuzzy continuous damping control is described as follows. Under good road conditions (RI and yaw rate values are extremely small), the additional damping force generated by fuzzy control should be as small as possible to prevent any impact on sky-hook control. When the RI reaches a relatively large degree, the compressed and damping reaction should be increased to prevent excessive roll moment and thereby produce a damping force with a compensation effect to resist rollover. When the RI value is relatively small and the yaw rate is large, the prevention of instability should be the top consideration, and the ground adhesion should be increased by boosting the damping force of relevant wheels so as to aid the ESP in producing satisfactory effects. When the RI and yaw rate are large but show opposite effects (this state is rare and is generally caused by tripped rollover), a moderate damping force can be considered to build a certain complementary relationship between stability and rollover.
The fuzzy implication relation that consists of a series of “if… then…” is composed of linguistic fuzzy rules, which can be converted into tabular fuzzy rules [
46]. The tabular fuzzy rules are intuitive, simple, and easy to check, which are often used in the design of fuzzy controllers. The fuzzy rule tables can be established as shown in the following
Table 1,
Table 2,
Table 3 and
Table 4 (CL1/CR1/CL2/CR2: damping reference coefficient of front left/front right/rear left/rear right wheel, respectively).
3.2.3. Clarity Process
After the fuzzy logic reasoning, the output conclusion is a fuzzy variable which cannot directly drive the actuator to control and needs to be changed into a clear variable. The process of transforming fuzzy variable into clear variable is called clarity. The method of calculating the curve of membership function of fuzzy set and the center of area surrounded by abscissa is centroid method [
42]. The solution
x0 and the mathematical expression of centroid method is as follows:
The quantization factors are defined as Nu = 1. The actual damping forces of suspension are calculated by the range of CDC and the damping reference coefficients of fuzzy control.
4. Simulation and Result Analysis
A real vehicle model is constructed in the software CarSim, and a control model is constructed in MATLAB/Simulink. The simulation analysis is performed through cosimulation in MATLAB/Simulink and CarSim. Passive suspension without any control (abbreviated as NC) and passive suspension with ESP (abbreviated as P-ESP) are compared with the multi-objective fuzzy continuous damping control strategy with ESP (abbreviated as MFCDC-ESP) to illustrate the effect. The main parameters of vehicle model and control model are shown in
Table 5 and
Table 6, respectively.
The real vehicle selected for the funding project is an A0 class high centroid vehicle. Although it has a high centroid, its mass is not large, and it is more prone to sideslip than to rollover in the absence of an ESC system when driving. Therefore, the selection of its parameters is the critical condition obtained via repeated simulations, and it can show the effect of vehicle control under the limited state.
To verify the MFCDC-ESP effect of stability and antirollover, this work compares and simulates three test conditions, namely, sine wave steer input test, DLC test, and fishhook test.
4.1. Sine Wave Steer Input Test
The sine wave steer input test is the most frequently used condition for verifying driver control stability. The basic parameters of the simulation analysis of the sine wave steer input test are shown in
Table 7.
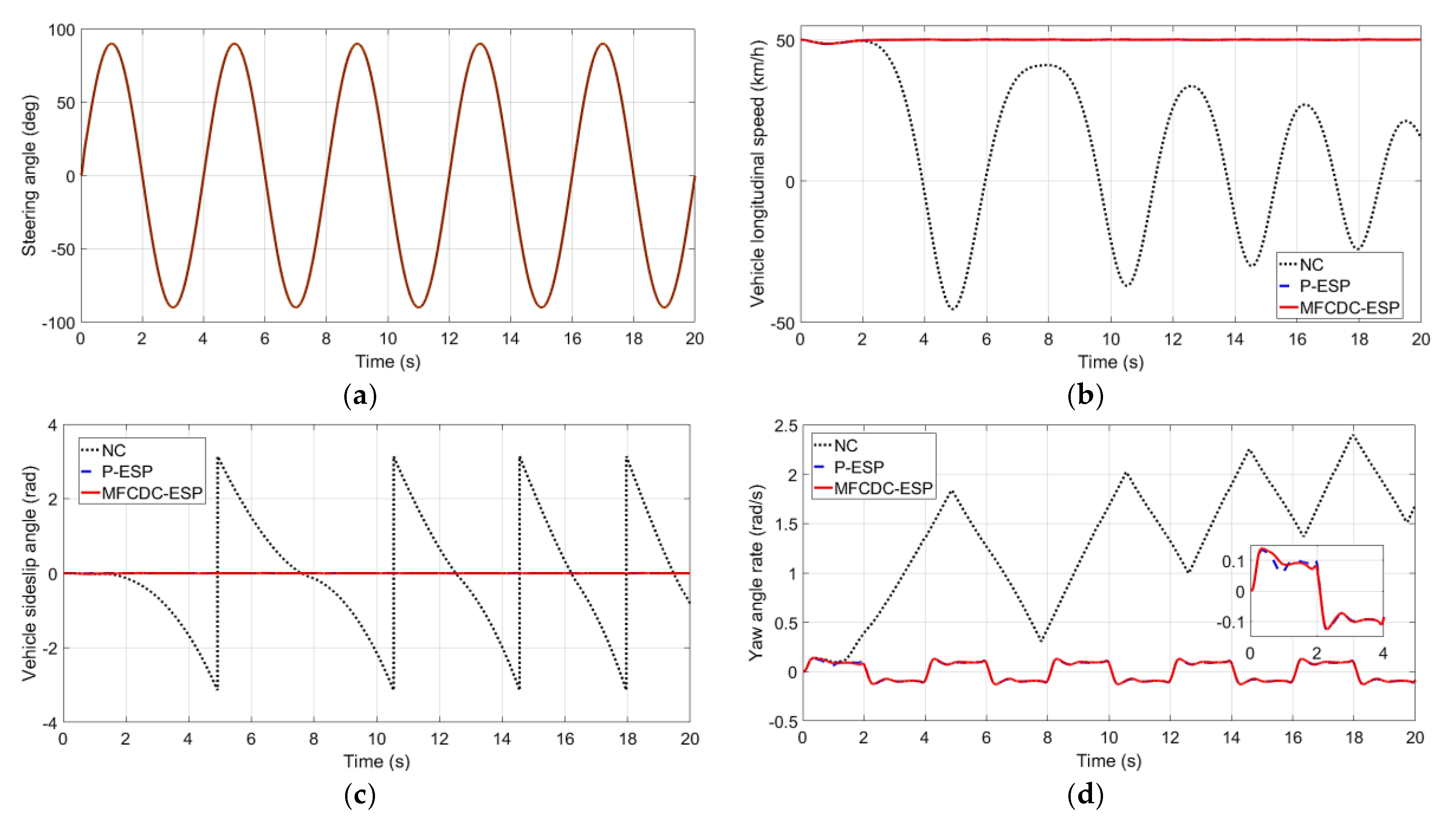
The results of simulation are shown in
Figure 9.
As shown in
Figure 9, the longitudinal speed of NC decreases rapidly at 2 s, and the sideslip angle of the mass center and the yaw angle rate increase at the same time. Then, violent vibration occurs, and the frequency of the oscillation cycle increases. In terms of vehicle speed, the speed of the vehicle with P-ESP and MFCDC-ESP is only slightly reduced at the beginning due to the respective effects of lateral force and braking force; then the vehicle maintains a stable target speed. With regard to the sideslip angle of the mass center and yaw rate, the range of variations is relatively small. These comparisons show that the vehicle without control loses stability and that the vehicles with P-ESP and MFCDC-ESP present a good control effect on vehicle stability.
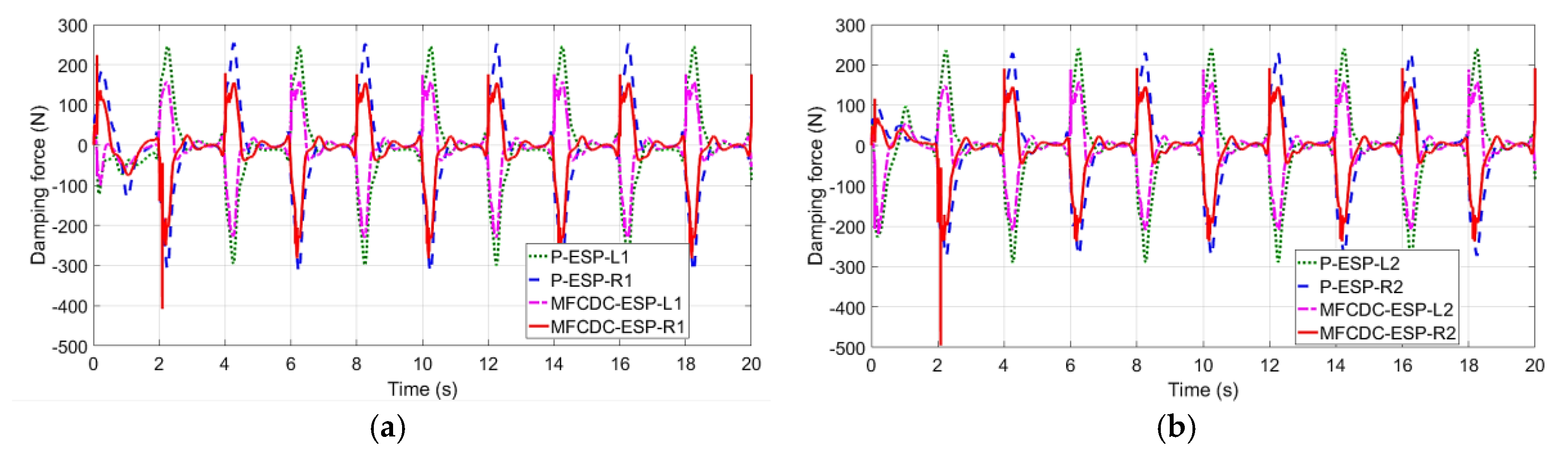
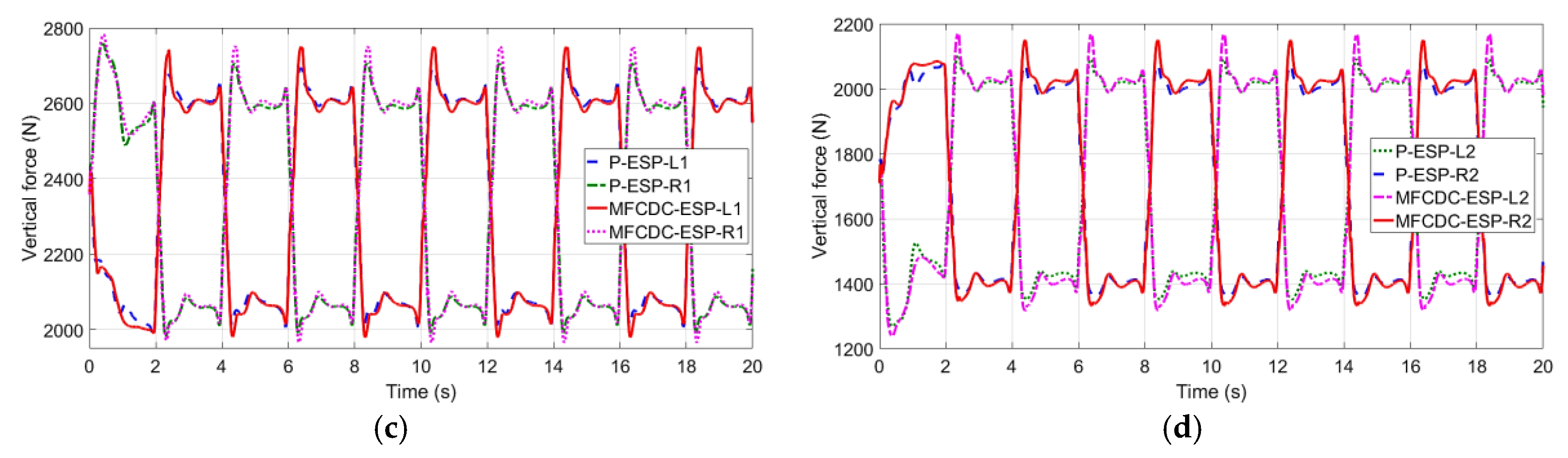
In illustrating the control effect of MFCDC-ESP, this work shows the vertical force and damping force in
Figure 10 and the simulation data results in
Table 8.
The average value of MFCDC-ESP’s yaw angle rate is far less than that of P-ESP in the whole control action (
Figure 10 and
Table 8). Hence, the whole vehicle is in a relatively stable state in the whole process of motion. As for the vertical force, the maximum vertical force of each wheel of MFCDC-ESP is greater than that of P-ESP while the minimum value of the former is less than that of the latter; the difference for the rear axle wheels is even greater. These results show that MFCDC-ESP can maximize the rear axle, which lacks lateral force, for stability control. From the point of view of the damping force of each wheel, the damping forces of the front and rear axles on the right side of MFCDC-ESP increase suddenly at about 2 s. As shown in
Figure 8, the moment at 2 s is the critical moment of lateral stability control (the vehicle with NC suddenly becomes unstable around this moment). The compensation effect of MFCDC-ESP also makes the vehicle establish good dynamic control. The standard deviation of the damping force of MFCDC-ESP is much smaller than that of P-ESP because of the sky-hook control effect after the vehicle enters the stationary period. This result also shows that the force on the vehicle body is reduced and that the passengers experience enhanced comfort. In practical application, MFCDC-ESP can automatically identify and switch the state between stability and comfort in real time due to its fuzzy control characteristics, so as to achieve the best driving effect.
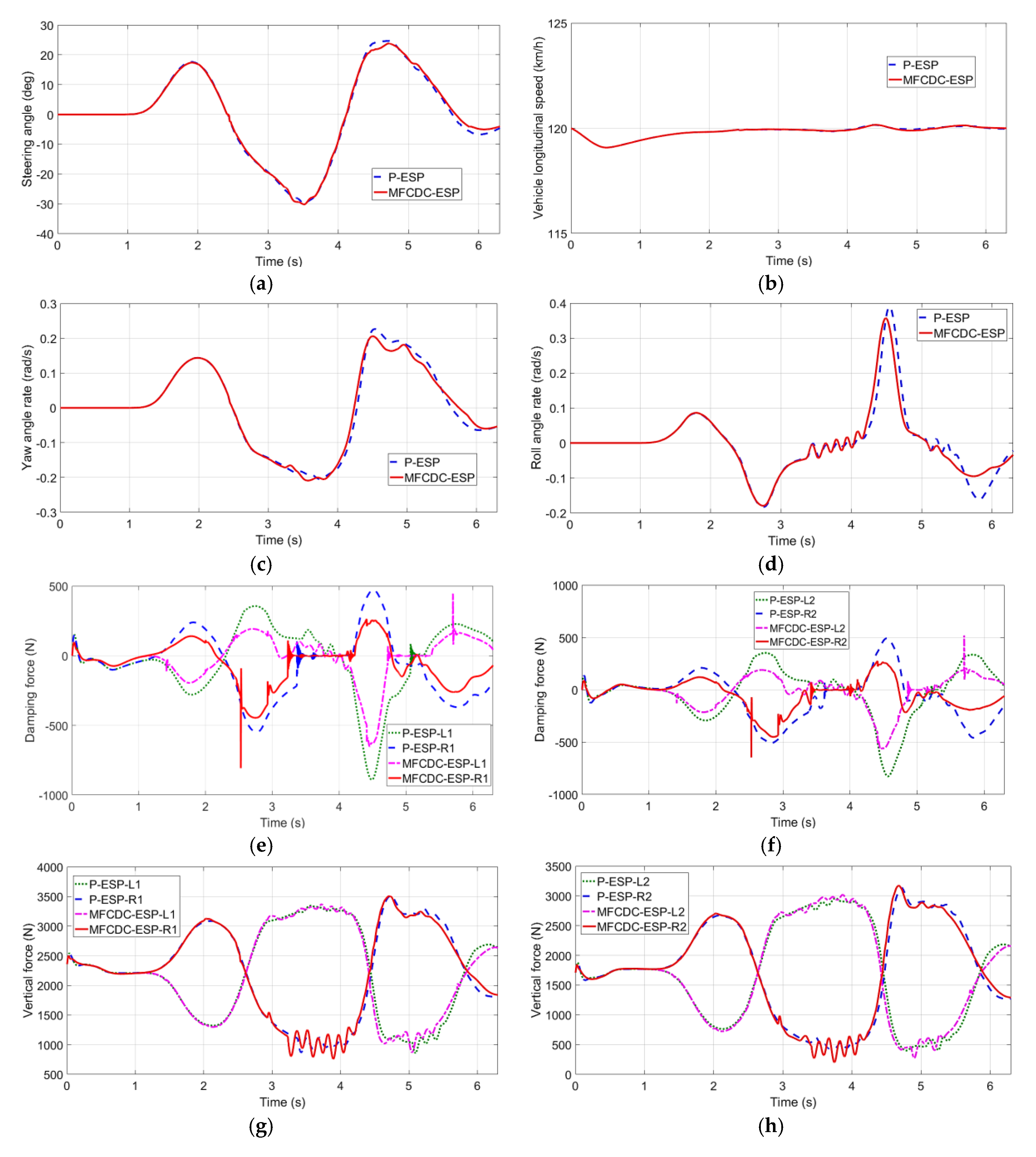
4.2. DLC Test
The DLC test is often used to measure the function effect of ESP. The DLC test in this work only compares P-ESP with MFCDC-ESP to show the superiority of the latter, especially given the result of the sine wave input test emphasizing that a vehicle without control can easily lose stability. The basic parameters of the DLC test simulation analysis are shown in
Table 9.
The results of the simulation are shown in
Figure 11.
The simulation curve shows that the vehicle maintains good stability under the two control strategies because of the ESP. In comparison with those of P-ESP, the roll angle rate of MFCDC-ESP is smaller, and the comfort felt by passengers is better. Given the influence of the sky-hook control of MFCDC-ESP, the damping force of MFCDC-ESP is generally less than that of P-ESP when driving in a stable state. However, at 2.5 and 5.7 s, the damping force of MFCDC-ESP suddenly increases. Combined with the steering angle, these two positions are the critical moment for the change of the steering angle and are the most vulnerable periods for the vehicle to lose stability (this point of view can be also clearly reflected in the previous sine wave steer input test). Moreover, the vertical forces are redistributed. The rear axle with great braking potential undertakes heavy load distribution without lateral force; the same effect is desired for vehicle control. Therefore, the control strategy of MFCDC-ESP can change the distribution of vertical forces and quickly compensate for the occurrence of instability; it even exerts a certain predictive effect. In addition, CDC plays an important role in driving stability with auxiliary effects. The simulation data are reported in
Table 10.
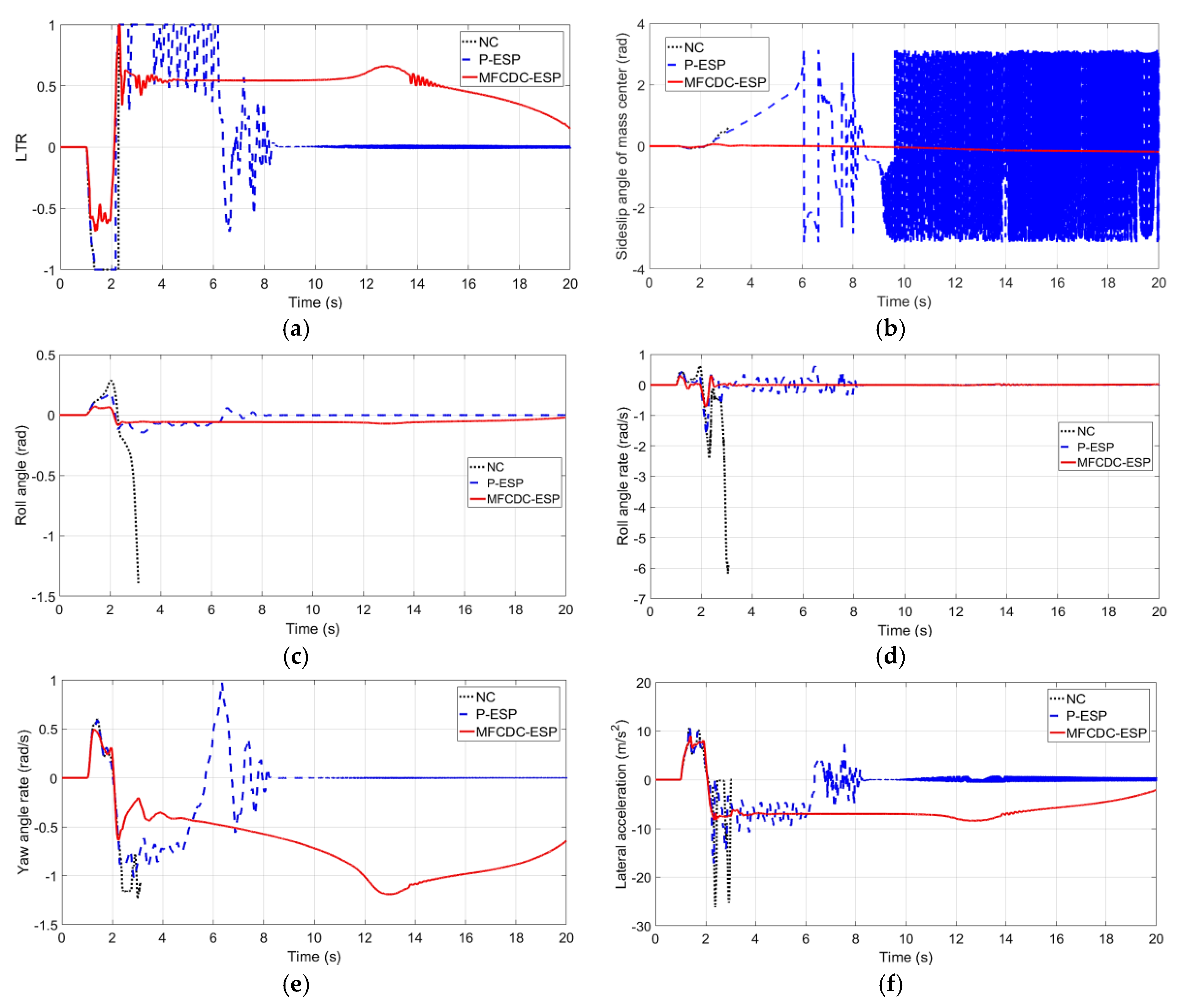
4.3. Fishhook Test
The fishhook test is used to verify the effect of MFCDC-ESP on rollover. The basic parameters of the fishhook test simulation analysis are shown in
Table 11.
The main parameters of the fishhook test simulation are shown in
Figure 12.
The LTR of the NC vehicle has a step at 3 s, with the roll angle and roll angle rate increasing sharply and resulting in serious rollover. Despite the many cases in which one side wheel is off the ground (LTR reaches 1 or −1), no rollover occurs with P-ESP. The main reason is that the lateral acceleration of the vehicle is reduced due to the action of the ESP. From the yaw angle rate and sideslip angle of the mass center, the whole vehicle vibrates from 6 s to 8 s. Although the yaw angle rate is controlled in a small range after 8 s, the continuous oscillation of the side slip angle of the mass center indicates that the vehicle has entered an unstable state. The vehicle with MFCDC-ESP has no instability phenomenon in the whole movement process, and all parameters are within the controllable range. Because the damping forces of CDC are controlled by electrical signal, the sudden changes of damping forces often lead to the sudden change of control current. The damping force current signal can be collected and identified by appropriate methods, and the driver can be given a corresponding real-time rollover warning, which improves the rollover prediction effect.

 ,
, 













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}