A Sample Weight and AdaBoost CNN-Based Coarse to Fine Classification of Fruit and Vegetables at a Supermarket Self-Checkout


Abstract
:1. Introduction
2. Literature Review
2.1. Robotic Harvesting
2.2. Quality Grading
2.3. Vision-Based Retail
3. Data Acquisition and Pre-Processing
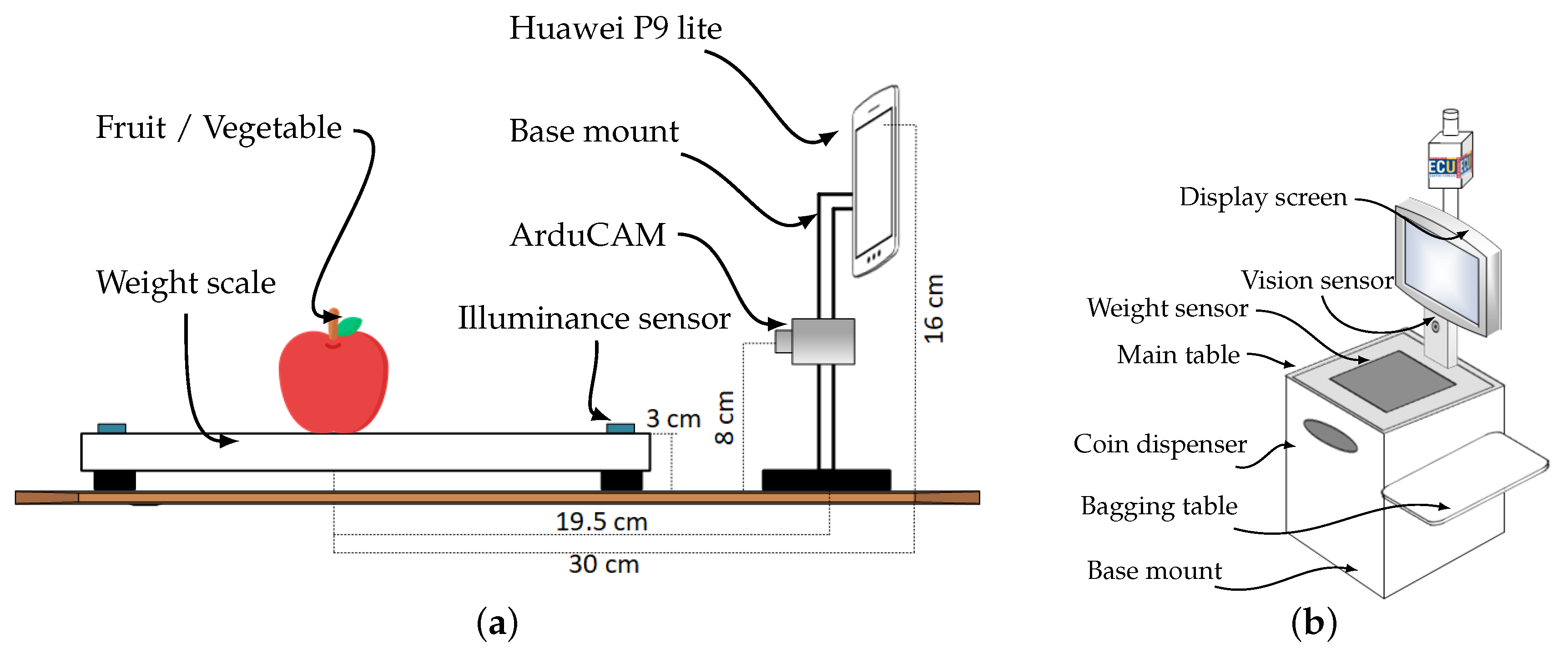
3.1. Prototype Design
3.2. Image Acquisition
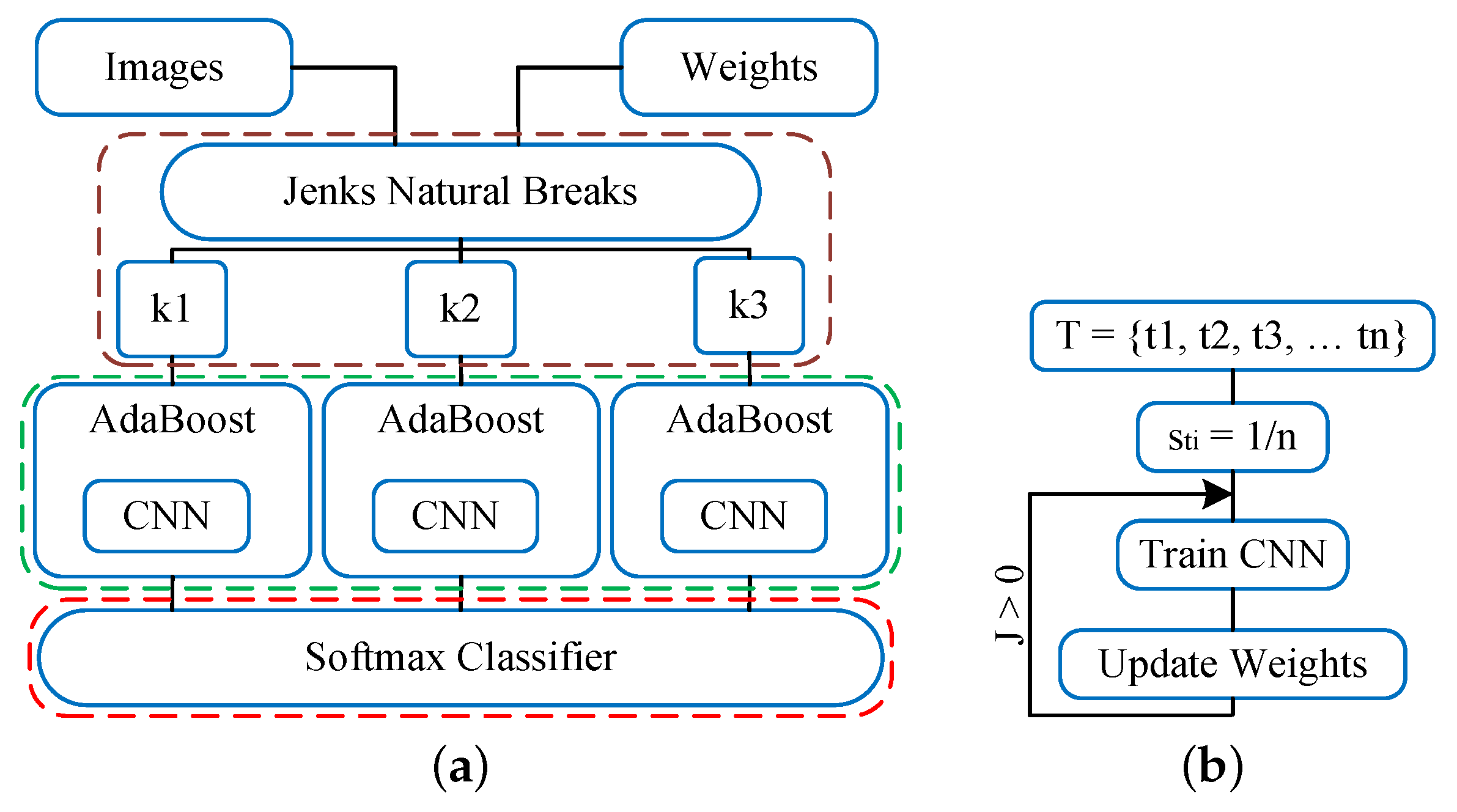
4. Methodology
4.1. Coarse Classification
4.2. Fine Classification
4.3. Testing the Proposed Approach
5. Implementation and Results
5.1. Implementation
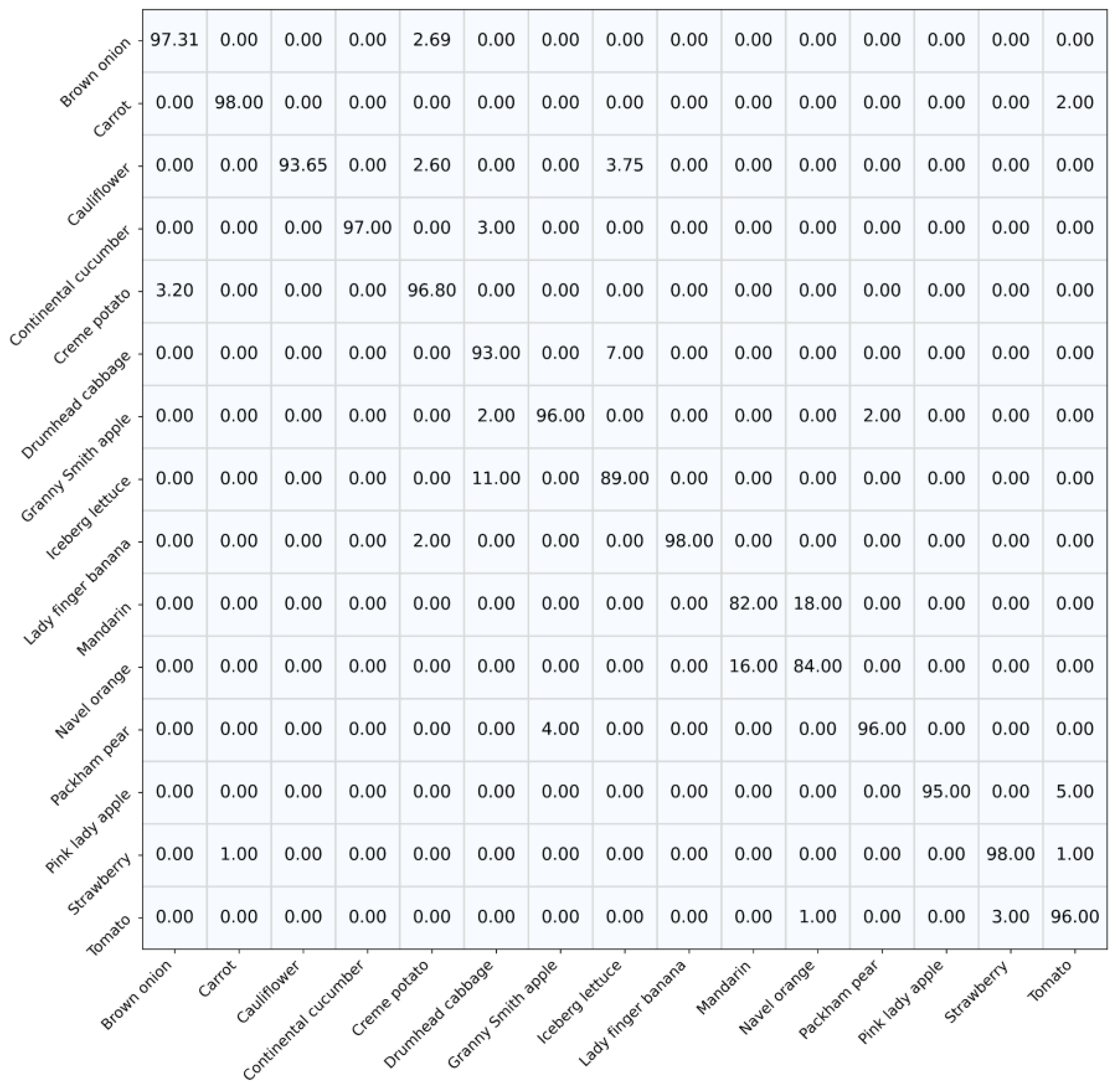
5.2. Experimental Results
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Nakos, N. Coles Market Share in Australia Has Declined. Australian Food News. Available online: https://www.ausfoodnews.com.au/2017/10/18/coles-market-share-in-australia-has-declined.html (accessed on 13 November 2020).
- Hogan, A. Supermarkets Dominate IBISWorld Top 1000 Australian Companies List. Available online: https://www.ausfoodnews.com.au/2017/03/10/supermarkets-dominate-ibisworld-top-1-000-australian-companies-list.html (accessed on 13 November 2020).
- O’Farrell, K. Australian Plastics Recycling Survey National Report; Department of Environment and Energy Australia: Sydney, Australia, 2017. [Google Scholar]
- Geyer, R.; Jambeck, J.R.; Law, K.L. Production, use, and fate of all plastics ever made. Sci. Adv. 2017, 3, e1700782. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Herwig, N.C. Method and Apparatus for Reducing Recognition Times in an Image-Based Product Recognition System. U.S. Patent 9,135,789, 15 September 2015. [Google Scholar]
- Walter, J.; Morrison, J.; Lin, H.J. Self-Checkout System. U.S. Patent 6,990,463, 24 January 2006. [Google Scholar]
- Iizuka, H. Information Processing Apparatus and Print Control Method. U.S. Patent 8,553,251, 8 October 2013. [Google Scholar]
- Dhankhar, M. Automated Object Recognition Kiosk for Retail Checkouts. U.S. Patent 10,366,445, 30 July 2019. [Google Scholar]
- Chung, C.L.; Huang, K.J.; Chen, S.Y.; Lai, M.H.; Chen, Y.C.; Kuo, Y.F. Detecting Bakanae disease in rice seedlings by machine vision. Comput. Electron. Agric. 2016, 121, 404–411. [Google Scholar] [CrossRef]
- Ganganagowder, N.V.; Kamath, P.R. Intelligent classification models for food products basis on morphological, colour and texture features. Acta Agronómica 2017, 66, 486–494. [Google Scholar] [CrossRef]
- Sun, Y.; Gu, X.; Sun, K.; Hu, H.; Xu, M.; Wang, Z.; Tu, K.; Pan, L. Hyperspectral reflectance imaging combined with chemometrics and successive projections algorithm for chilling injury classification in peaches. Lwt 2017, 75, 557–564. [Google Scholar] [CrossRef]
- Zhang, J.; Wang, N.; Yuan, L.; Chen, F.; Wu, K. Discrimination of winter wheat disease and insect stresses using continuous wavelet features extracted from foliar spectral measurements. Biosyst. Eng. 2017, 162, 20–29. [Google Scholar] [CrossRef]
- Liu, S.; Cossell, S.; Tang, J.; Dunn, G.; Whitty, M. A computer vision system for early stage grape yield estimation based on shoot detection. Comput. Electron. Agric. 2017, 137, 88–101. [Google Scholar] [CrossRef]
- Fernández, R.; Montes, H.; Surdilovic, J.; Surdilovic, D.; Gonzalez-De-Santos, P.; Armada, M. Automatic Detection of Field-Grown Cucumbers for Robotic Harvesting. IEEE Access 2018, 6, 35512–35527. [Google Scholar] [CrossRef]
- Altaheri, H.; Alsulaiman, M.; Muhammad, G. Date Fruit Classification for Robotic Harvesting in a Natural Environment Using Deep Learning. IEEE Access 2019, 7, 117115–117133. [Google Scholar] [CrossRef]
- SepúLveda, D.; Fernández, R.; Navas, E.; Armada, M.; González-De-Santos, P. Robotic Aubergine Harvesting Using Dual-Arm Manipulation. IEEE Access 2020, 8, 121889–121904. [Google Scholar] [CrossRef]
- Birrell, S.; Hughes, J.; Cai, J.Y.; Iida, F. A field-tested robotic harvesting system for iceberg lettuce. J. Field Robot. 2020, 37, 225–245. [Google Scholar] [CrossRef] [Green Version]
- Yamamoto, K.; Guo, W.; Yoshioka, Y.; Ninomiya, S. On plant detection of intact tomato fruits using image analysis and machine learning methods. Sensors 2014, 14, 12191–12206. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, B.; Long, Y.; Song, H. Detection of green apples in natural scenes based on saliency theory and Gaussian curve fitting. Int. J. Agric. Biol. Eng. 2018, 11, 192–198. [Google Scholar] [CrossRef] [Green Version]
- Barnea, E.; Mairon, R.; Ben-Shahar, O. Colour-agnostic shape-based 3D fruit detection for crop harvesting robots. Biosyst. Eng. 2016, 146, 57–70. [Google Scholar] [CrossRef]
- Bhargava, A.; Bansal, A. Fruits and vegetables quality evaluation using computer vision: A review. J. King Saud-Univ. Comput. Inf. Sci. 2018, 1, 1–15. [Google Scholar] [CrossRef]
- Zhang, H.; Wu, J.; Zhao, Z.; Wang, Z. Nondestructive firmness measurement of differently shaped pears with a dual-frequency index based on acoustic vibration. Postharvest Biol. Technol. 2018, 138, 11–18. [Google Scholar] [CrossRef]
- Rachmawati, E.; Supriana, I.; Khodra, M.L. Toward a new approach in fruit recognition using hybrid RGBD features and fruit hierarchy property. In Proceedings of the International Conference on Electrical Engineering, Computer Science and Informatics (EECSI), Yogyakarta, Indonesia, 19–21 September 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Zhang, Z.; Cao, R.; Peng, C.; Liu, R.; Sun, Y.; Zhang, M.; Li, H. Cut-Edge Detection Method for Rice Harvesting Based on Machine Vision. Agronomy 2020, 10, 590. [Google Scholar] [CrossRef]
- Chen, M.; Tang, Y.; Zou, X.; Huang, K.; Huang, Z.; Zhou, H.; Wang, C.; Lian, G. Three-dimensional perception of orchard banana central stock enhanced by adaptive multi-vision technology. Comput. Electron. Agric. 2020, 174, 105508. [Google Scholar] [CrossRef]
- Tang, Y.C.; Wang, C.; Luo, L.; Zou, X.; Chen, M.; LI, J. Recognition and localization methods for vision-based fruit picking robots: A review. Front. Plant Sci. 2020, 11, 510. [Google Scholar] [CrossRef]
- Tian, H.; Wang, T.; Liu, Y.; Qiao, X.; Li, Y. Computer vision technology in agricultural automation A review. Inf. Process. Agric. 2020, 7, 1–19. [Google Scholar] [CrossRef]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. Imagenet classification with deep convolutional neural networks. In Advances in Neural Information Processing Systems; The MIT Press: Cambridge, MA, USA, 2012; pp. 1097–1105. [Google Scholar]
- Nasiri, A.; Taheri-Garavand, A.; Zhang, Y.D. Image-based deep learning automated sorting of date fruit. Postharvest Biol. Technol. 2019, 153, 133–141. [Google Scholar] [CrossRef]
- Farooq, M.; Sazonov, E. Feature extraction using deep learning for food type recognition. In Proceedings of the International Conference on Bioinformatics and Biomedical Engineering (ICBBE), Seoul, Korea, 12–14 November 2017; pp. 464–472. [Google Scholar] [CrossRef]
- Srivastava, S.; Vani, B.; Sadistap, S. Machine-vision based handheld embedded system to extract quality parameters of citrus cultivars. J. Food Meas. Charact. 2020, 14, 2746–2759. [Google Scholar] [CrossRef]
- Habib, M.T.; Majumder, A.; Jakaria, A.; Akter, M.; Uddin, M.S.; Ahmed, F. Machine vision based papaya disease recognition. J. King Saud-Univ. Inf. Sci. 2020, 32, 300–309. [Google Scholar] [CrossRef]
- Zanatta da Costa, A.; da Costa, A.Z.; Figueroa, H.E.; Fracarolli, J.A. Computer vision based detection of external defects on tomatoes using deep learning. Biosyst. Eng. 2020, 190, 131–144. [Google Scholar] [CrossRef]
- Bhargava, A.; Bansal, A. Quality evaluation of Mono & Bi-Colored Apples with computer vision and multispectral imaging. Multimed. Tools Appl. 2020, 79, 7857–7874. [Google Scholar] [CrossRef]
- Kumar, S.D.; Esakkirajan, S.; Bama, S.; Keerthiveena, B. A Microcontroller based Machine Vision Approach for Tomato Grading and Sorting using SVM Classifier. Microprocess. Microsyst. 2020, 76, 103090. [Google Scholar] [CrossRef]
- Femling, F.; Olsson, A.; Alonso-Fernandez, F. Fruit and Vegetable Identification Using Machine Learning for Retail Applications. In Proceedings of the International Conference on Signal-Image Technology Internet-Based Systems (SITIS), Las Palmas de Gran Canaria, Spain, 26–29 November 2018; pp. 9–15. [Google Scholar] [CrossRef] [Green Version]
- Hossain, M.S.; Al-Hammadi, M.; Muhammad, G. Automatic Fruit Classification Using Deep Learning for Industrial Applications. IEEE Trans. Ind. Inform. 2019, 15, 1027–1034. [Google Scholar] [CrossRef]
- Licht, Y.Z.; Saker, R.D. Reinforcement Machine Learning for Item Detection. U.S. Patent 20,200,042,491, 6 February 2020. [Google Scholar]
- Schögel, M.; Lienhard, S.D. Cashierless Stores the New Way to the Customer. Mark. Rev. St. Gall. 2020, 30, 1–5. [Google Scholar]
- Patil, A.R.; Paolella, M.; Palella, M.; Trivelpiece, S.E. Self-Service Product Return Using Computer Vision and Artificial Intelligence. U.S. Patent 20,200,151,735, 14 May 2020. [Google Scholar]
- Rojas-Aranda, J.L.; Nunez-Varela, J.I.; Cuevas-Tello, J.; Rangel-Ramirez, G. Fruit Classification for Retail Stores Using Deep Learning. In Pattern Recognition, Mexican Conference on Pattern Recognition (MCPR); Elsevier: Amsterdam, The Netherlands, 2020; pp. 3–13. [Google Scholar]
- Srivastava, M.M. Bag of Tricks for Retail Product Image Classification. In Image Analysis and Recognition; Springer: Berlin, Germany, 2020; pp. 71–82. [Google Scholar]
- Liu, C.; Liang, Y.; Xue, Y.; Qian, X.; Fu, J. Food and Ingredient Joint Learning for Fine-Grained Recognition. IEEE Trans. Circuits Syst. Video Technol. 2020, 1, 1051–8215. [Google Scholar] [CrossRef]
- Hameed, K.; Chai, D.; Rassau, A. A progressive weighted average weight optimisation ensemble technique for fruit and vegetable classification. In Proceedings of the International Conference on Control, Automation, Robotics and Vision (ICARCV), Shenzhen, China, 13–15 December 2020; pp. 1–6. [Google Scholar]
- Hameed, K.; Chai, D.; Rassau, A. A comprehensive review of fruit and vegetable classification techniques. Image Vis. Comput. 2018, 80, 24–44. [Google Scholar] [CrossRef]
- Rehman, T.U.; Mahmud, M.S.; Chang, Y.K.; Jin, J.; Shin, J. Current and future applications of statistical machine learning algorithms for agricultural machine vision systems. Comput. Electron. Agric. 2019, 156, 585–605. [Google Scholar] [CrossRef]
- Tripathi, M.K.; Maktedar, D.D. A role of computer vision in fruits and vegetables among various horticulture products of agriculture fields: A survey. Inf. Process. Agric. 2020, 7, 183–203. [Google Scholar] [CrossRef]
- Recommended Lighting Levels. Available online: https://decrolux.com/news/2017/recommended-lighting-levels (accessed on 18 September 2020).
- Grocery Store Lighting Guide for Making Food Look Fresh. Available online: https://www.standardpro.com/grocery-store-lighting/ (accessed on 18 September 2020).
- Light Level Recommendations for Safe, Healthy & Comfortable Lighting. Available online: https://www.rexellighting.co.nz/uploads/attachments/Light-Level-Recommendations.pdf (accessed on 18 September 2020).
- Supermarket Lighting Design Guide. Available online: https://www.contechlighting.com/en/docs/contechsupermarketlightingguide2018_0.pdf (accessed on 18 September 2020).
- Quartier, K.; Christiaans, H.; Van Cleempoel, K. Retail design: Lighting as an atmospheric tool, creating experiences which influence consumers’ mood and behaviour in commercial spaces. In Proceedings of the Design Research Society Conference (DRSC), Sheffield, UK, 16–19 July 2008; pp. 1–17. [Google Scholar]
- Alvi, M.B.; Hameed, K.; Alvi, M.; Javed, W.; Afzal, M. Algorithmic State Machine and Data Based Modeling of Superscalar Processor of Order 2. In Proceedings of the International Conference on Software Technology and Engineering (ICSTE), Kuala Lumpur, Malaysia, 12–14 August 2011; pp. 1–5. [Google Scholar] [CrossRef]
- Jenks, G. Optimal Data Classification for Choropleth Maps Occasional Paper No. 2; Department of Geography, University of Kansas: Lawrence, Kansas, 1977. [Google Scholar]
- Freund, Y.; Schapire, R.; Abe, N. A short introduction to boosting. J.-Jpn. Soc. Artif. Intell. 1999, 14, 1612. [Google Scholar] [CrossRef]
- Hastie, T.; Rosset, S.; Zhu, J.; Zou, H. Multi-class adaboost. Stat. Interface 2009, 2, 349–360. [Google Scholar] [CrossRef] [Green Version]
- Zeiler, M.D.; Fergus, R. Visualizing and understanding convolutional networks. In Proceedings of the European Conference on Computer Vision (ECCV), Zurich, Switzerland, 6–12 September 2014; pp. 818–833. [Google Scholar] [CrossRef] [Green Version]
- Szegedy, C.; Liu, W.; Jia, Y.; Sermanet, P.; Reed, S.; Anguelov, D.; Erhan, D.; Vanhoucke, V.; Rabinovich, A. Going deeper with convolutions. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015; pp. 1–9. [Google Scholar] [CrossRef] [Green Version]
- Sandler, M.; Howard, A.; Zhu, M.; Zhmoginov, A.; Chen, L.C. Mobilenetv2: Inverted residuals and linear bottlenecks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Salt Lake City, UT, USA, 18–23 June 2018; pp. 4510–4520. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.D.; Dong, Z.; Chen, X.; Jia, W.; Du, S.; Muhammad, K.; Wang, S.H. Image based fruit category classification by 13-layer deep convolutional neural network and data augmentation. Multimed. Tools Appl. 2017, 78, 3613–3632. [Google Scholar] [CrossRef]
- Glorot, X.; Bengio, Y. Understanding the difficulty of training deep feedforward neural networks. In Proceedings of the International Conference on Artificial Intelligence and Statistics (ICAIS), Las Vegas, NV, USA, 12–15 July 2010; pp. 249–256. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. | Year | Fruit/Vegetable | Features | ML Technique | Accuracy (%) |
|---|---|---|---|---|---|
| [9] | 2016 | Rice Crop | Morphology, height, length | KNN | 87.9 |
| [10] | 2017 | FoodCast dataset | Colour mean and variance | Naive Bayes | 73.0 |
| [11] | 2017 | Radish | Spectral features | Discriminant Analysis | 74.4 |
| [12] | 2017 | Wheat | Texture approximation | Discriminant Analysis | 77.0 |
| [13] | 2017 | Grapes | Correlation similarity matrix | K-Means | 86.8 |
| [14] | 2018 | Cucumber | Blob centroid | Pixel SVM | 85.6 |
| [15] | 2019 | Date fruit | Deep texture feature | AlexNet | 92.3 |
| [16] | 2020 | Fruit and vegetables | HSV colour transforms | SVM | 92.7 |
| [17] | 2020 | Lettuce | Deep CNN features | DarkNet | 93.0 |
| This paper | Fruit and vegetables | Sample weight Deep CNN features | Jenks Natural Breaks AdaBoost Optimised CNN | 93.9 | |
| Vision Sensors | |||||
|---|---|---|---|---|---|
| Brand Name | Resolution | Sensor | Height | Distance | |
| 1 | ArduCAM MT9F001 | 4384 × 3288 | 1/2.3 inch CMOS | 8 cm | 19.5 cm |
| 2 | Huawei P9 Lite | 3120 × 4160 | Sony IMX214 Exmor RS | 16 cm | 30 cm |
| Weight sensor | |||||
| 3 | AccuPost PP-70N | 10 g–32 kg, USB 2.0/3.0 supported Windows 10 | |||
| Illuminance sensor | |||||
| 4 | Ambient light sensor | Arduino BH1750 ambient light sensor | |||
| Controlling embedded system | |||||
| 5 | Embedded system | Arduino Uno (ATmega-328), 8-bit, 16 MHz | |||
| Fruit/Vegetable | Nomenclature | Avg. Weight (kg) | Average Illuminance (LS1–LS4) Lux | ||||
|---|---|---|---|---|---|---|---|
| 1 | Brown onion | ONIBRXXXX | 0.212 | 526.17 | 524.84 | 523.56 | 522.57 |
| 2 | Carrot | CARROXXXX | 0.064 | 525.02 | 527.20 | 522.95 | 524.39 |
| 3 | Cauliflower | CABCAXXXX | 0.419 | 526.34 | 525.12 | 525.35 | 523.08 |
| 4 | Continental cucumber | CUCCOXXXX | 0.014 | 533.08 | 525.70 | 529.26 | 525.94 |
| 5 | Creme potato | POTCRXXXX | 0.140 | 527.94 | 523.90 | 525.08 | 527.10 |
| 6 | Drumhead cabbage | CABDRXXXX | 0.833 | 534.03 | 528.22 | 523.58 | 529.09 |
| 7 | Granny Smith apple | APPGSXXXX | 0.164 | 523.79 | 522.65 | 525.75 | 526.06 |
| 8 | Iceberg lettuce | LETICXXXX | 0.432 | 531.46 | 525.87 | 530.42 | 526.30 |
| 9 | Lady finger banana | BANLFXXXX | 0.125 | 523.67 | 522.55 | 523.45 | 526.62 |
| 10 | Mandarin | MANDAXXXX | 0.138 | 525.85 | 526.88 | 529.81 | 526.49 |
| 11 | Navel orange | ORANAXXXX | 0.138 | 524.97 | 526.92 | 528.67 | 523.33 |
| 12 | Packham pear | PEAPAXXXX | 0.150 | 529.43 | 530.63 | 530.13 | 535.69 |
| 13 | Pink lady apple | APPPLXXXX | 0.326 | 529.32 | 523.56 | 522.13 | 535.77 |
| 14 | Strawberry | BERSTXXXX | 0.012 | 525.81 | 525.63 | 522.00 | 527.37 |
| 15 | Tomato | TOMFIXXXX | 0.132 | 523.55 | 523.56 | 526.91 | 532.98 |
| Layer | Kernel Size | No. of Nodes | Stride | Padding | Layer Weights | Layer Bias | Output Size | |
|---|---|---|---|---|---|---|---|---|
| 1 | Input | - | - | - | - | - | - | 512 × 512 × 3 |
| 2 | Conv | 7 × 7 | 40 | 3 × 3 | 0 × 0 | 7 × 7 × 3 × 40 | 1 × 1 × 40 | 170 × 170 × 40 |
| 3 | Pooling | 3 × 3 | - | 3 × 3 | 0 × 0 | - | - | 56 × 56 × 40 |
| 4 | Conv | 7 × 7 | 80 | 3 × 3 | 2 × 2 | 7 × 7 × 40 × 80 | 1 × 1 × 80 | 18 × 18 × 80 |
| 5 | Pooling | 3 × 3 | - | 1 × 1 | 1 × 1 | - | - | 18 × 18 × 80 |
| 6 | Conv | 3 × 3 | 120 | 1 × 1 | 1 × 1 | 3 × 3 × 80 × 120 | 1 × 1 × 120 | 18 × 18 × 120 |
| 7 | Pooling | 3 × 3 | - | 1 × 1 | 1 × 1 | - | - | 18 × 18 × 120 |
| 8 | Conv | 3 × 3 | 80 | 1 × 1 | 1 × 1 | 3 × 3 × 120 × 80 | 1 × 1 × 80 | 18 × 18 × 80 |
| 9 | Pooling | 3 × 3 | - | 1 × 1 | 1 × 1 | - | - | 18 × 18 × 80 |
| 10 | Conv | 1 × 1 | 80 | 1 × 1 | 1 × 1 | 1 × 1 × 80 × 80 | 1 × 1 × 80 | 20 × 20 × 80 |
| 11 | Pooling | 3 × 3 | - | 1 × 1 | 1 × 1 | - | - | 20 × 20 × 80 |
| 12 | FC | - | 40 | - | - | - | - | 1 × 1 × 40 |
| 13 | FC | - | 15 | - | - | - | - | 1 × 1 × 15 |
| 14 | Softmax | - | - | - | - | - | - | 1 × 1 × 15 |
| 15 | Output | - | - | - | - | - | - | 1 × 1 × 15 |
| Fruit/Vegetables | Avg. Weight (kg) | Weight. Dev | Class | % of Dataset | |
|---|---|---|---|---|---|
| 1 | Strawberry | 0.012 | 0.02 | Class 1 | 46.66 |
| 2 | Continental cucumber | 0.014 | 0.07 | ||
| 3 | Carrot | 0.064 | 0.02 | ||
| 4 | Lady finger banana | 0.125 | 0.02 | ||
| 5 | Tomato | 0.132 | 0.02 | ||
| 6 | Mandarin | 0.138 | 0.03 | ||
| 7 | Navel orange | 0.138 | 0.03 | ||
| 8 | Creme potato | 0.140 | 0.03 | Class 2 | 26.66 |
| 9 | Packham pear | 0.150 | 0.03 | ||
| 10 | Granny Smith apple | 0.164 | 0.03 | ||
| 11 | Brown onion | 0.212 | 0.04 | ||
| 12 | Pink lady apple | 0.326 | 0.19 | Class 3 | 26.66 |
| 13 | Cauliflower | 0.419 | 0.05 | ||
| 14 | Iceberg lettuce | 0.432 | 0.03 | ||
| 15 | Drumhead cabbage | 0.833 | 0.06 | ||
| Epochs | Network | Training Accuracy (%) | Test Accuracy (%) | Network | Training Accuracy (%) | Test Accuracy (%) |
|---|---|---|---|---|---|---|
| 10 | Pre-trained GoogleNet | 81.90 | 78.56 | Pre-trained MobileNet | 78.69 | 71.52 |
| 15 | 93.45 | 82.71 | 81.23 | 78.86 | ||
| 20 | 94.65 | 81.78 | 89.98 | 80.23 | ||
| 25 | 96.45 | 83.56 | 94.87 | 81.44 | ||
| 30 | 95.67 | 82.10 | 95.56 | 83.15 | ||
| 10 | AdaBoost GoogleNet | 81.86 | 72.96 | AdaBoost MobileNet | 86.56 | 81.45 |
| 12 | 87.10 | 81.24 | 92.63 | 87.21 | ||
| 14 | 89.74 | 78.58 | 94.44 | 88.45 | ||
| 16 | 93.25 | 76.63 | 95.50 | 91.33 | ||
| 18 | 96.21 | 76.00 | 94.88 | 87.56 |
| Epochs | Training Accuracy (%) | Test Accuracy (%) |
|---|---|---|
| 10 | 93.10 | 80.13 |
| 15 | 94.17 | 83.43 |
| 20 | 96.42 | 88.69 |
| 22 | 95.67 | 93.97 |
| 25 | 97.14 | 85.11 |
| Fruit/Vegetable | Accuracy (%) | ER (%) | PPV (%) | TNR (%) | TPR (%) | F1 Score | |
|---|---|---|---|---|---|---|---|
| 1 | Brown onion | 99.47 | 0.53 | 96.00 | 99.71 | 96.00 | 0.960 |
| 2 | Carrot | 99.73 | 0.27 | 98.00 | 99.86 | 98.00 | 0.980 |
| 3 | Cauliflower | 99.47 | 0.53 | 100.00 | 100.00 | 92.00 | 0.958 |
| 4 | Continental cucumber | 99.73 | 0.27 | 100.00 | 100.00 | 96.00 | 0.980 |
| 5 | Creme potato | 99.07 | 0.93 | 90.57 | 99.29 | 96.00 | 0.932 |
| 6 | Drumhead cabbage | 98.40 | 1.60 | 85.19 | 98.86 | 92.00 | 0.885 |
| 7 | Granny Smith apple | 99.47 | 0.53 | 96.00 | 99.71 | 96.00 | 0.960 |
| 8 | Iceberg lettuce | 98.53 | 1.47 | 88.24 | 99.14 | 90.00 | 0.891 |
| 9 | Lady finger banana | 99.87 | 0.13 | 100.00 | 100.00 | 98.00 | 0.990 |
| 10 | Mandarin | 97.73 | 2.27 | 83.67 | 98.86 | 82.00 | 0.828 |
| 11 | Navel orange | 97.60 | 2.40 | 80.77 | 98.57 | 84.00 | 0.824 |
| 12 | Packham pear | 99.60 | 0.40 | 97.96 | 99.86 | 96.00 | 0.970 |
| 13 | Pink lady apple | 99.60 | 0.40 | 100.00 | 100.00 | 94.00 | 0.969 |
| 14 | Strawberry | 99.60 | 0.40 | 97.96 | 99.86 | 96.00 | 0.970 |
| 15 | Tomato | 99.70 | 0.93 | 90.57 | 99.29 | 96.00 | 0.932 |
| Device Type | Memory | Execution Unit | |
|---|---|---|---|
| 1 | CPU | 16 GB | Intel Xenon (8-cores) |
| 2 | GPU | 32 GB | Tesla K80 (4992-cores) |
| Model | CPU (ms) | GPU (ms) | |
|---|---|---|---|
| 1 | GoogleNet | 1954.32 | 723.82 |
| 2 | MobileNet | 1889.56 | 674.84 |
| 3 | Custom CNN | 1647.65 | 588.44 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hameed, K.; Chai, D.; Rassau, A. A Sample Weight and AdaBoost CNN-Based Coarse to Fine Classification of Fruit and Vegetables at a Supermarket Self-Checkout. Appl. Sci. 2020, 10, 8667. https://doi.org/10.3390/app10238667
Hameed K, Chai D, Rassau A. A Sample Weight and AdaBoost CNN-Based Coarse to Fine Classification of Fruit and Vegetables at a Supermarket Self-Checkout. Applied Sciences. 2020; 10(23):8667. https://doi.org/10.3390/app10238667
Chicago/Turabian StyleHameed, Khurram, Douglas Chai, and Alexander Rassau. 2020. "A Sample Weight and AdaBoost CNN-Based Coarse to Fine Classification of Fruit and Vegetables at a Supermarket Self-Checkout" Applied Sciences 10, no. 23: 8667. https://doi.org/10.3390/app10238667
APA StyleHameed, K., Chai, D., & Rassau, A. (2020). A Sample Weight and AdaBoost CNN-Based Coarse to Fine Classification of Fruit and Vegetables at a Supermarket Self-Checkout. Applied Sciences, 10(23), 8667. https://doi.org/10.3390/app10238667