Torque and Battery Distribution Strategy for Saving Energy of an Electric Vehicle with Three Traction Motors


Abstract
:1. Introduction
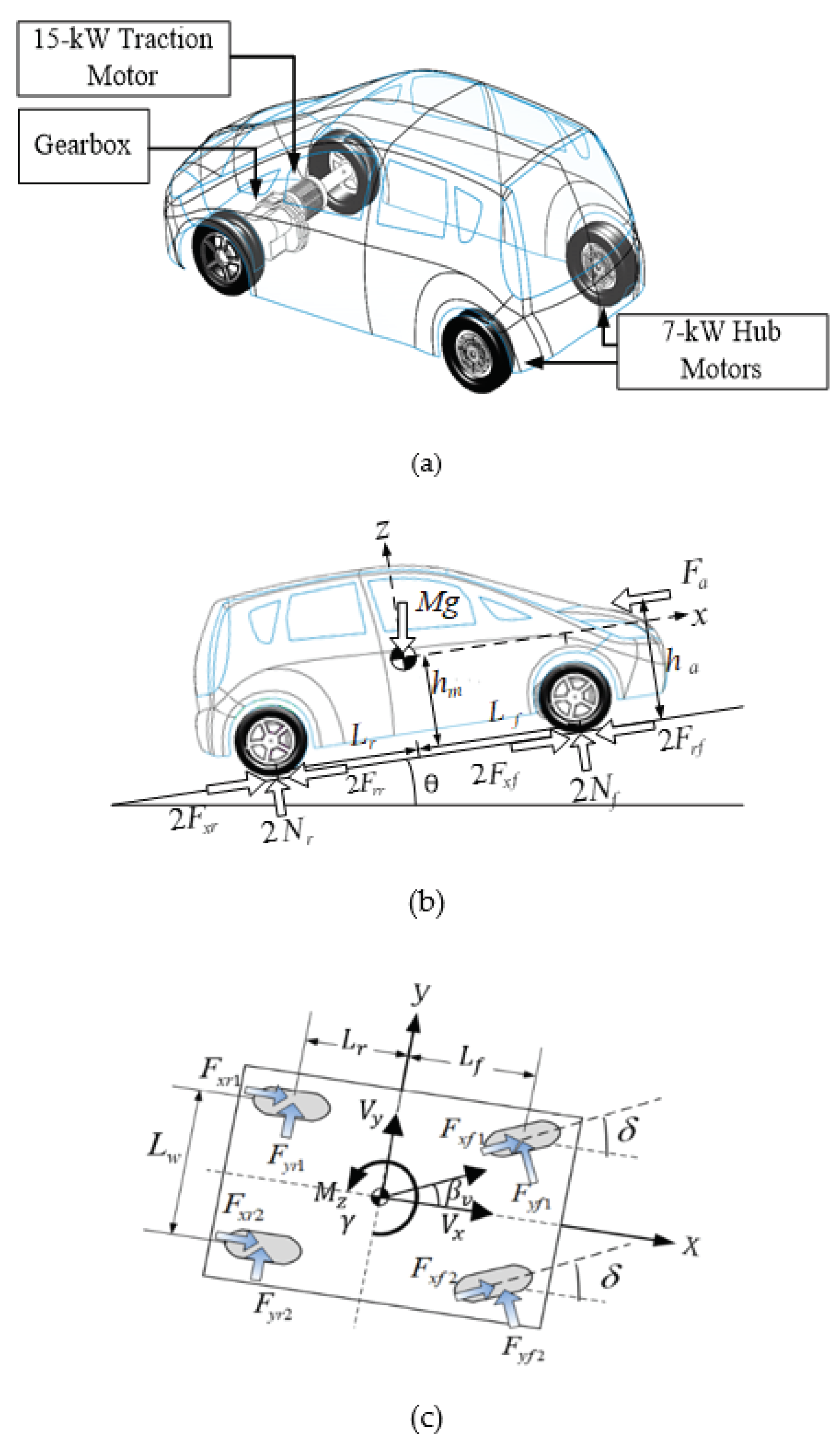
2. Vehicle Configuration
2.1. Longitudinal Vehicle Dynamics Model
2.2. Lateral Vehicle Dynamics Model
2.3. Tire Model
2.4. Transmission Model
- The rotor mass is so small compared with the vehicle mass that the rotational inertias of the three traction motors are neglected.
- The viscous and Coulomb frictions of motors and differentials in the transmission are all neglected.
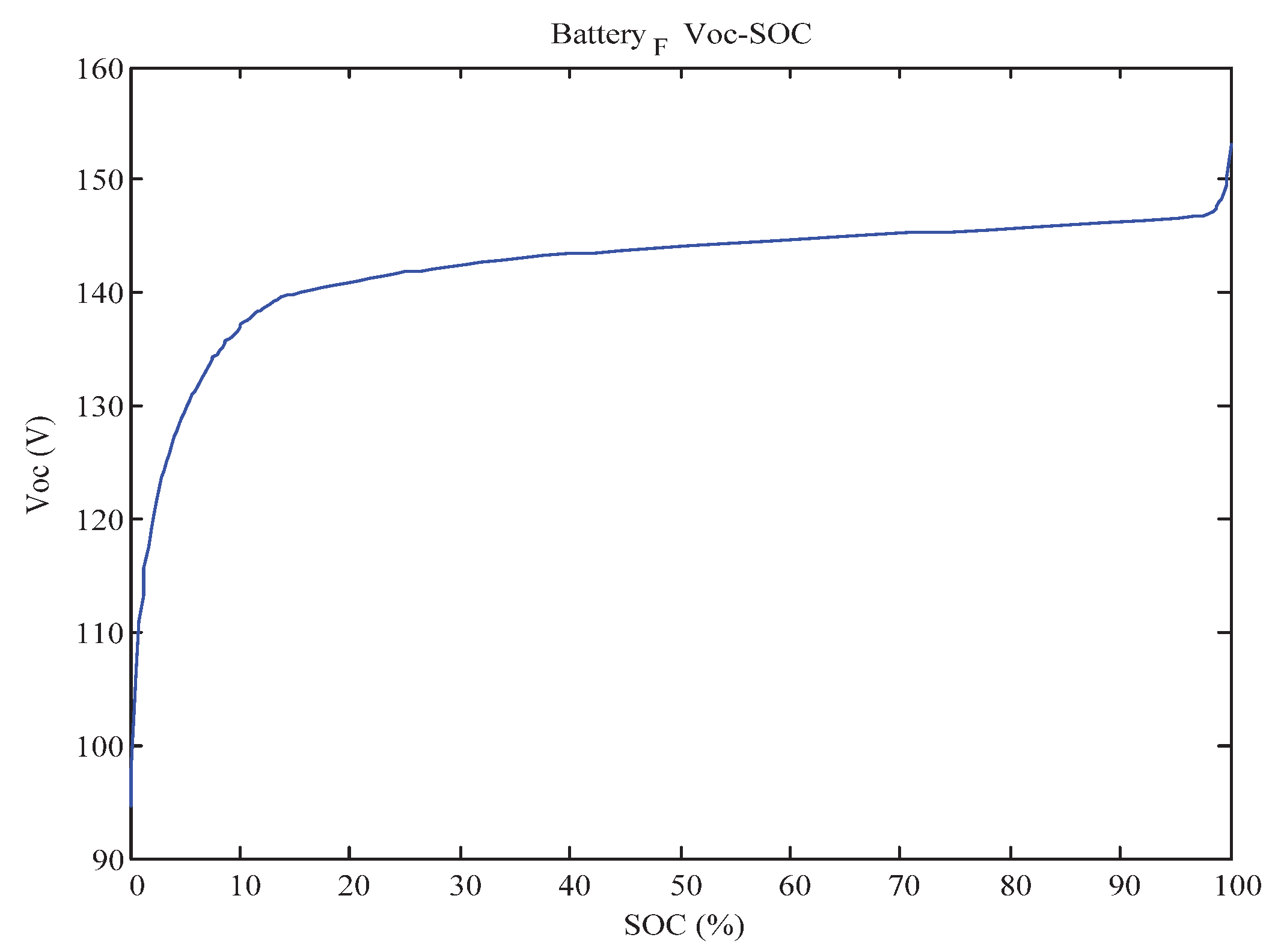
2.5. Battery State of Charge Model
3. Torque and Battery Distribution Strategy
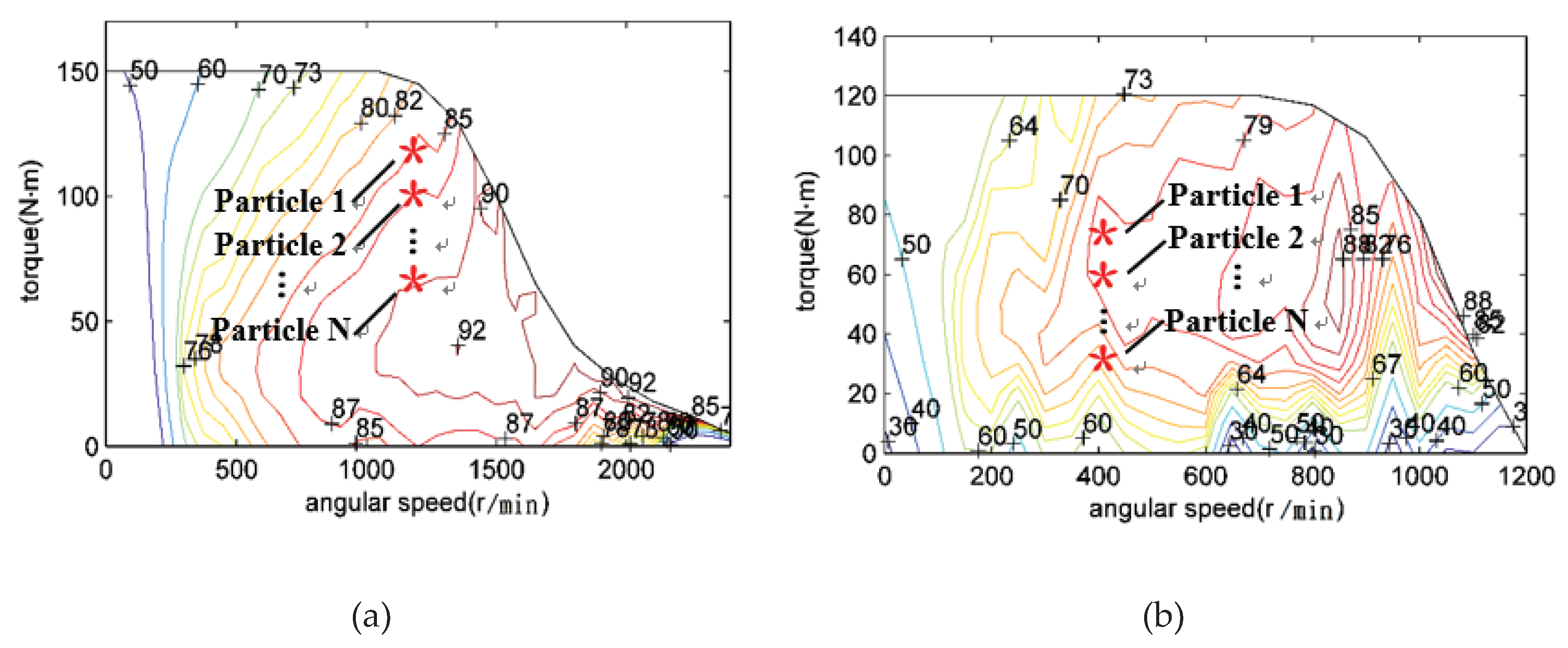
3.1. Torque Distribution Strategy: Particle Swarm Optimization
3.2. Torque Distribution Strategy: Priority Torque Ratio in Front and Rear Motors
3.3. Battery Energy Consumption
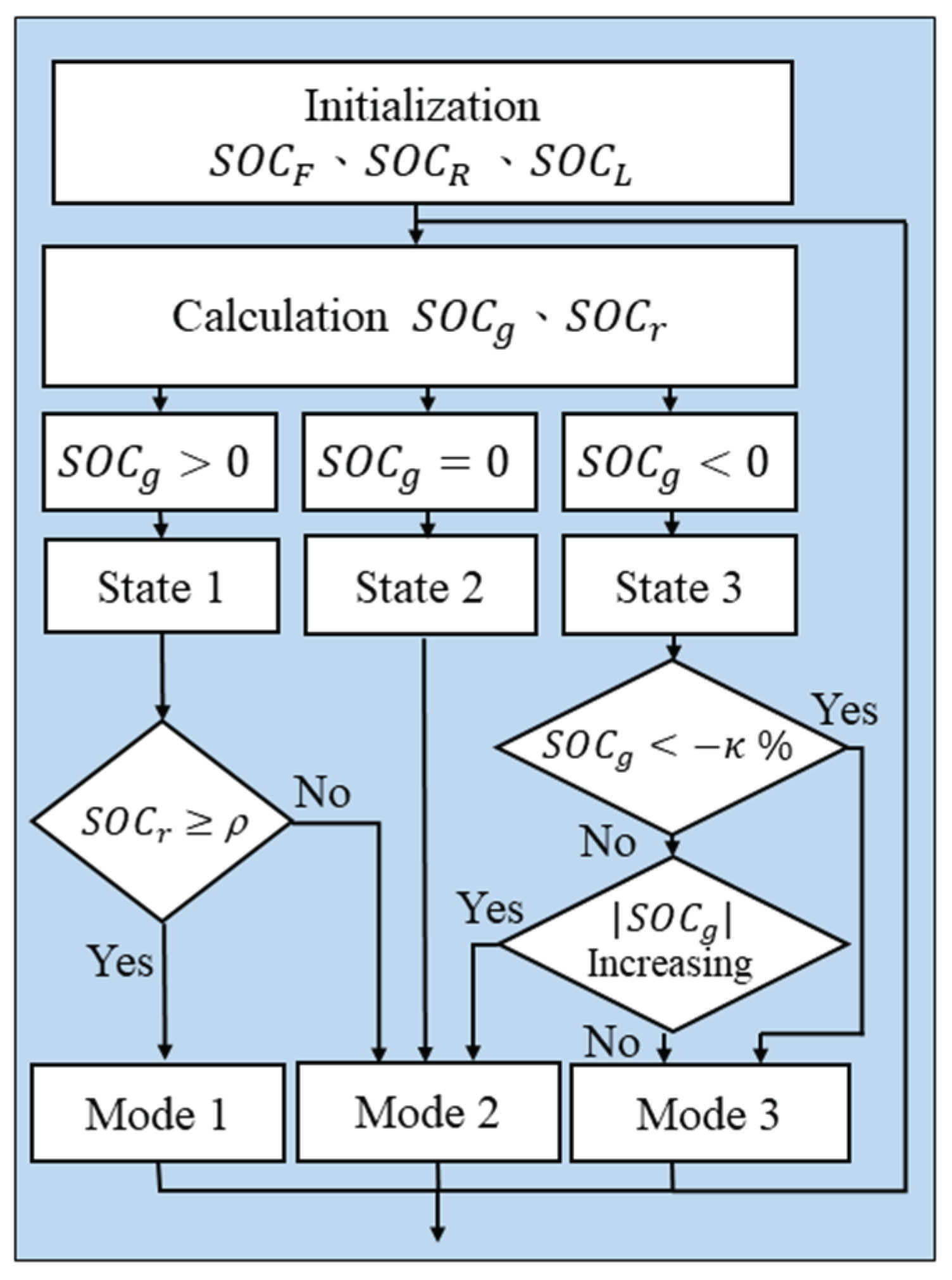
3.4. Torque and Battery Distribution (TBD) Strategy
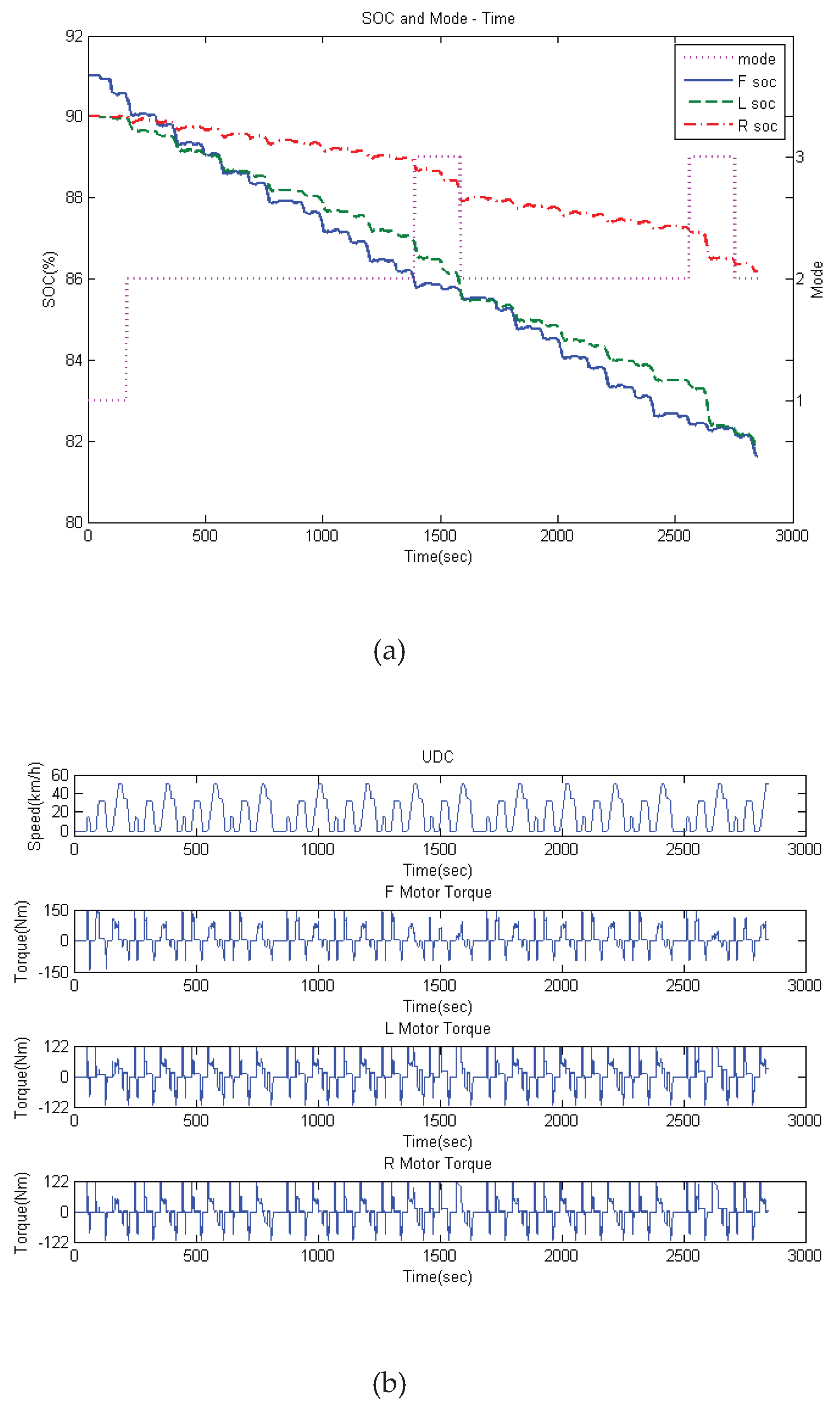
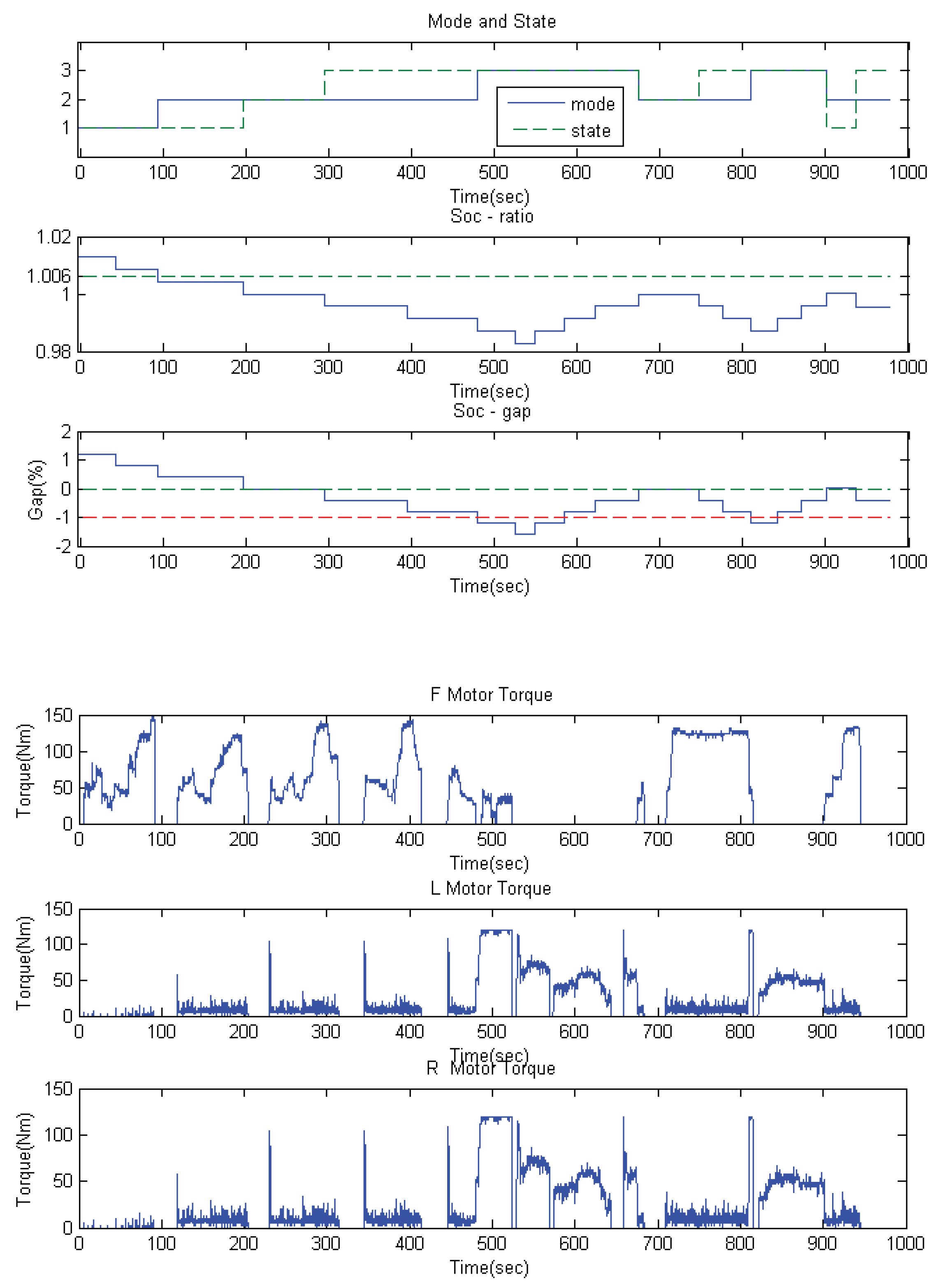
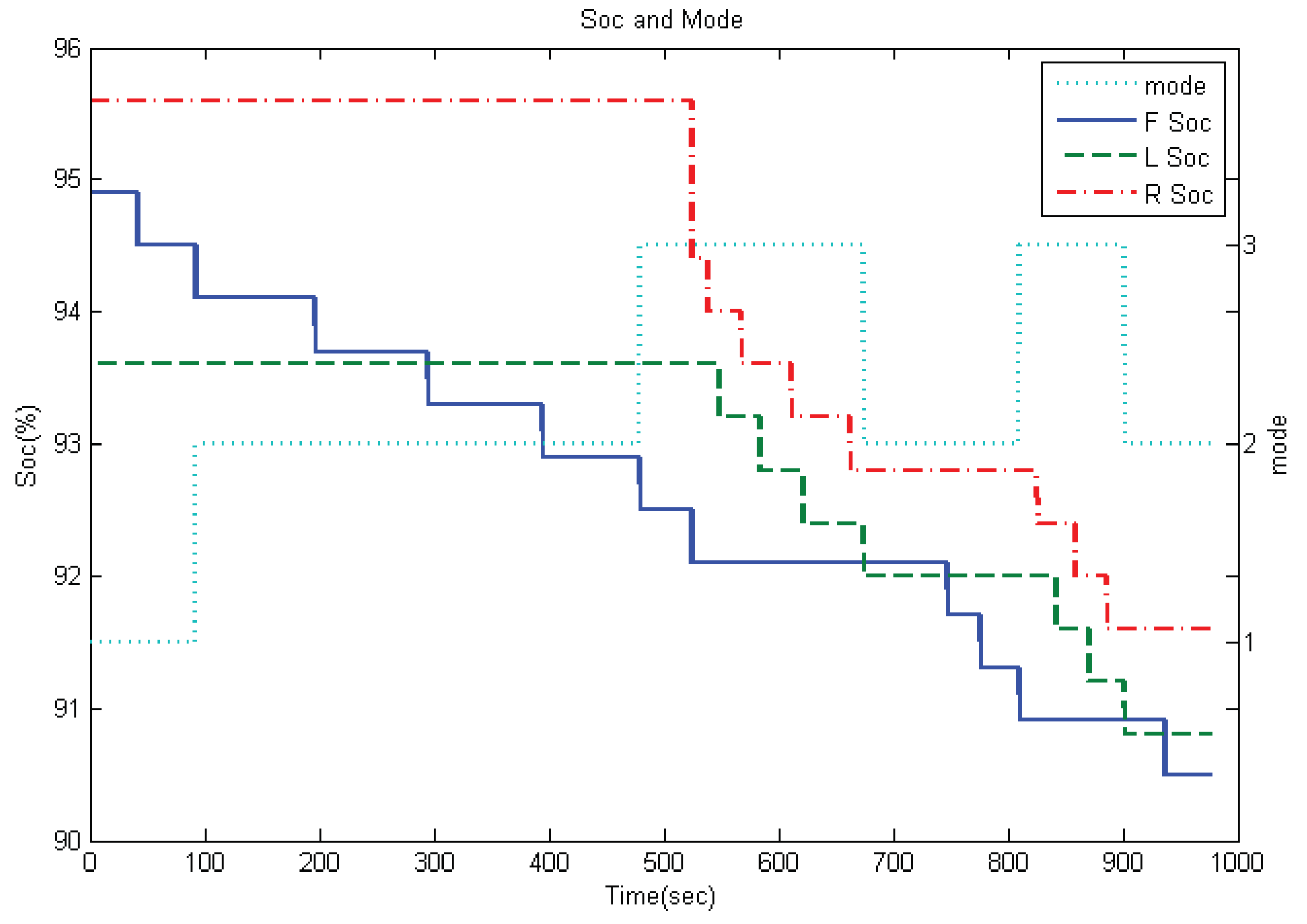
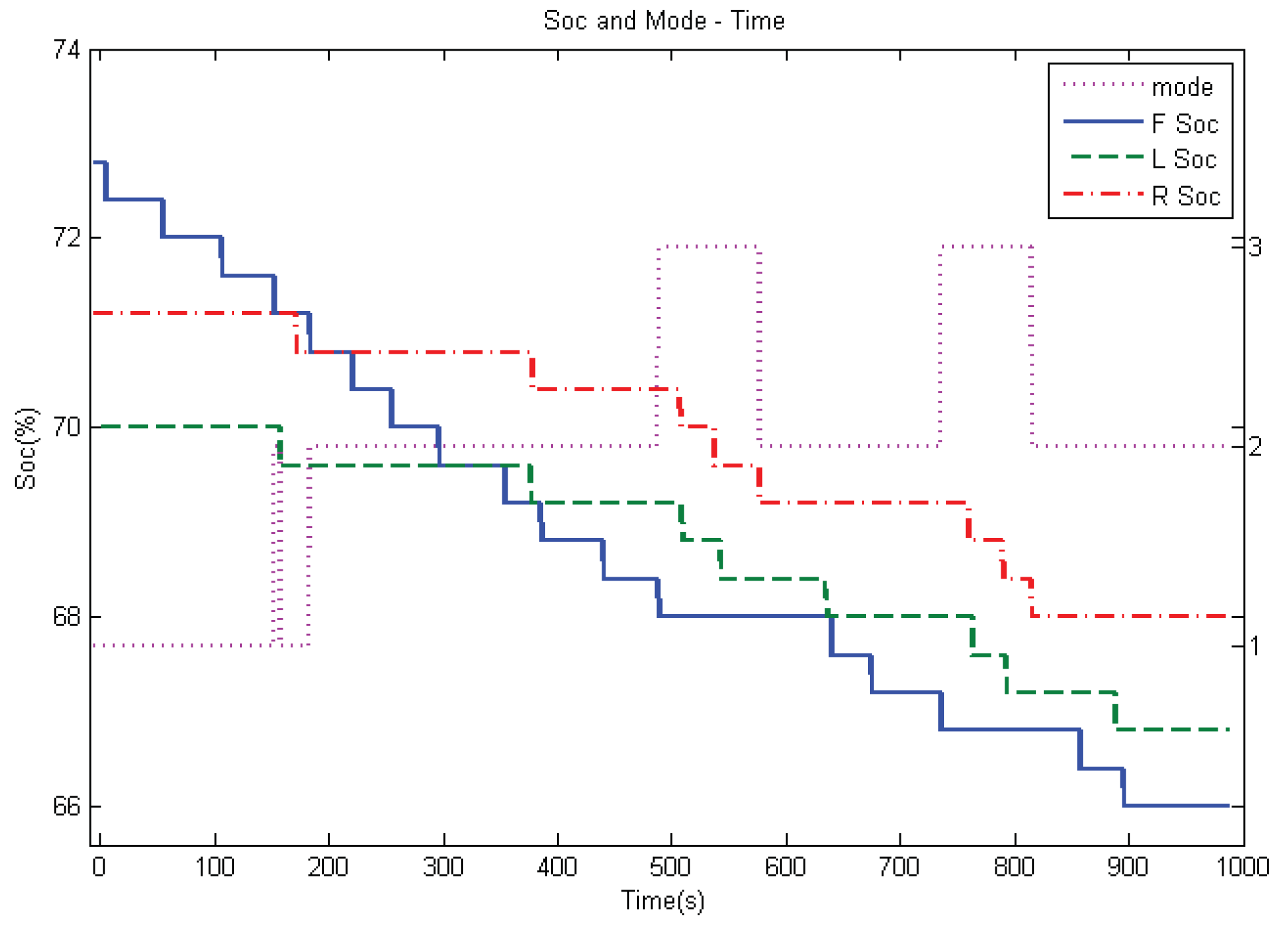
- SOC gap (SOCg): The SOC gap was defined as the difference between the SOC of the front battery pack and the lower SOC of the two rear battery packs. It was negative when the front battery had less power remaining than the rear batteries, and it was positive when the front battery had more power than the rear batteries. In applications, a default value SOCg % () can be assigned to determine the torque distribution mode (Figure 4).
- SOC ratio (SOCr): The SOC ratio was defined as the ratio of energy consumption in terms of the SOC between the front battery pack and the two rear battery packs. On the basis of the simulation of straight road driving under the PSO strategy, as indicated in Table 2, the SOCr converged to 2.94 for the long-term operation of the UDCs. In applications, a default value, ρ (), was assigned to determine the torque distribution mode under the TBD strategy.
- State 1: The SOC of the front battery pack was higher than that of any of the rear battery packs.
- State 2: The SOC of the front battery pack was equal to that of any of the two rear battery packs.
- State 3: The SOC of the front battery pack was lower than that of the rear battery pack.
- Mode 1: was proposed when the front motor had the first priority for delivering the torque under the condition of SOCg and SOCr .
- 2.
- Mode 2: The PSO strategy was prescribed when there was not much difference in the SOC of the three battery packs under the following conditions: SOCg or (SOCg and SOCr ) or ( SOCg −% and |SOCg| was increasing).
- 3.
- Mode 3: was proposed when the rear motors took top priority for delivering more the torque than the front motor under the following conditions: SOCg or (SOCg and |SOCg| was decreasing).
4. Experiments
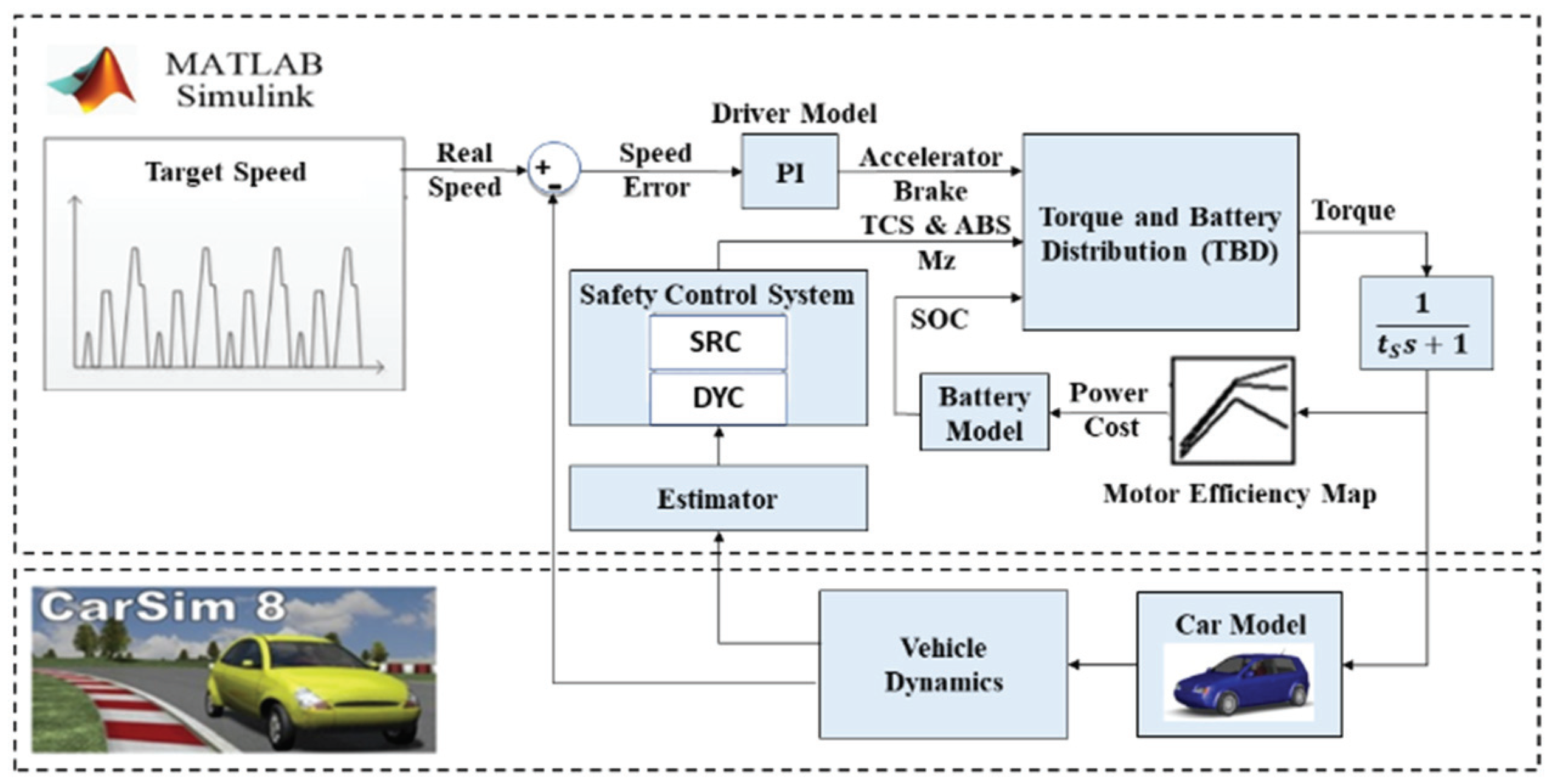
4.1. Model-in-the-Loop Simulations
4.2. Hardware-in-the-Loop Simulations
4.3. Road Tests
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Li, W.; Fu, Y.; Liu, T.; Chu, P.; Wang, J.; Chen, H. Battery equalization based on state of charge. In Proceedings of the 2nd International Conference on Systems and Informatics, Shanghai, China, 15–17 November 2014; pp. 159–163. [Google Scholar]
- Gallardo-Lozano, J.; Romero-Cadaval, E.; Jalakas, T.; Hõimojaet, H. A battery cell balancing method with linear mode bypass current control. In Proceedings of the 14th Biennial Baltic Electronic Conference, Tallinn, Estonia, 6–8 October 2014; pp. 245–248. [Google Scholar]
- Huang, W.; Abu Qahouq, J.A. Energy sharing control scheme for state-of-charge balancing of distributed battery energy storage system. IEEE Trans. Ind. Electron. 2015, 62, 2764–2776. [Google Scholar] [CrossRef]
- Pham, V.L.; Tung, N.T.; Tran, D.H.; Vu, B.; Choi, W. A new cell-to-cell fast balancing circuit for lithium-ion batteries in electric vehicles and energy storage system. In Proceedings of the IEEE 8th International Power Electronics and Motion Control Conference, Hefei, China, 22–26 May 2016; pp. 2461–2465. [Google Scholar]
- Dung, L.R.; Lin, C.T.; Yuan, H.F. An anti-racing PWM-based battery pack equalization. In Proceedings of the 14th International Conference on Control, Automation and Systems, Seoul, Korea, 22–25 October 2014; pp. 1244–1248. [Google Scholar]
- Jin, F.; Wang, M.; Hu, C. A fuzzy logic based power management strategy for hybrid energy storage system in hybrid electric vehicles considering battery degradation. In Proceedings of the IEEE Transportation Electrification Conference and Expo, Dearborn, MI, USA, 26–29 June 2016; pp. 1–7. [Google Scholar]
- Akar, F.; Tavlasoglu, Y.; Vural, B. An energy management strategy for a concept battery/ultracapacitor electric vehicle with improved battery life. IEEE Trans. Transport. Electrific. 2017, 3, 191–200. [Google Scholar] [CrossRef]
- Menon, R.; Azeez, N.A.; Kadam, A.H.; Williamson, S.S. Carrier based power balancing in three-level open-end drive for electric vehicles. In Proceedings of the IEEE 12th International Conference on Compatibility, Power Electronics and Power Engineering, Doha, Qatar, 10–12 April 2018; pp. 1–6. [Google Scholar]
- Tanaka, Y.; Tsuruta, Y.; Nozaki, T.; Kawamura, A. Proposal of ultra high efficient energy conversion system (HEECS) for electric vehicle power train. In Proceedings of the IEEE International Conference on Mechatronics, Nagoya, Japan, 6–8 March 2015; pp. 703–708. [Google Scholar]
- Rossi, C.; Pontara, D.; Bertoldi, M.; Casadei, D. Two-motor, two-axle traction system for full electric vehicle. World Electr. Veh. J. 2016, 8, 25. [Google Scholar] [CrossRef] [Green Version]
- Yin, D.; Shan, D.; Chen, B.C. A torque distribution approach to electronic stability control for in-wheel motor electric vehicles. In Proceedings of the International Conference on Applied System Innovation, Okinawa, Japan, 28 May–1 June 2016; pp. 1–4. [Google Scholar]
- Zhai, L.; Sun, T.; Wang, J. Electronic stability control based on motor driving and braking torque distribution for a four in-wheel motor drive electric vehicle. IEEE Trans. Veh. Technol. 2016, 65, 4726–4739. [Google Scholar] [CrossRef]
- Dizqah, A.M.; Lenzo, B.; Sorniotti, A.; Gruber, P.; Fallah, S.; Smet, D.J. A fast and parametric torque distribution strategy for four-wheel-drive energy-efficient electric vehicles. IEEE Trans. Ind. Electron. 2016, 63, 4367–4376. [Google Scholar] [CrossRef] [Green Version]
- Fujimoto, H.; Harada, S. Model based range extension control system for electric vehicles with front and rear driving braking force distributions. IEEE Trans. Ind. Electron. 2015, 62, 3245–3254. [Google Scholar] [CrossRef]
- Sun, H.; Wang, H.; Zhao, X. Line braking torque allocation scheme for minimal braking loss of four-wheel-drive electric vehicles. IEEE Trans. Veh. Technol. 2019, 68, 180–192. [Google Scholar] [CrossRef]
- Yang, Y.P.; Shih, Y.C.; Chen, J.M. Real-time torque-distribution strategy for a pure electric vehicle with multiple traction motors by particle swarm optimization. IET Elect. Syst. Transp. 2015, 6, 76–87. [Google Scholar] [CrossRef]
- Yang, Y.P.; Chen, W.C. Coupled energy-saving and safe-driving strategy for an electric vehicle driven by multiple motors. In Proceedings of the 30st International Electric Vehicle Symposium & Exhibition, Stuttgart, Germany, 9–11 October 2017; pp. 1–10. [Google Scholar]
- Tseng, Y.H.; Yang, Y.P. An energy saving strategy of torque and battery distribution for an electric vehicle driven by multiple traction motors. In Proceedings of the Electric Vehicles International Conference & Show, Bucharest, Romania, 3–4 October 2019. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Vehicle Property | Symbol | Value |
|---|---|---|
| Frontal area of vehicle [m2] | 1.6 | |
| Aerodynamic coefficient | 0.28 | |
| Cornering stiffness of the front tire [N/rad] | 51,091 | |
| Cornering stiffness of the rear tires [N/rad] | 72,802 | |
| Rolling resistance between tire and ground | 0.01 | |
| Height of equivalent aerodynamic point [m] | 1 | |
| Height of mass center [m] | 0.56 | |
| Yaw inertia of vehicle [kg∙m2] | 1200 | |
| Distance from mass center to front tire [m] | 1.433 | |
| Distance from mass center to rear tire [m] | 1.067 | |
| Distance between two rear wheels [m] | 1.46 | |
| Total mass of vehicle [kg] | 1813 | |
| Sprung mass of vehicle [kg] | 1753 | |
| Gear ratio | 3 | |
| Tire radius [m] | 0.288 |
| Strategy | Battery Energy Consumption [Wh] | ||||
|---|---|---|---|---|---|
| Front | Rear Right | Rear Left | Total | ||
| UDC on a Straight Road | |||||
| PSO | 223.2 | 37.76 | 37.76 | 298.72 | |
| PTR | 44.00 | 158.4 | 158.4 | 361.16 | |
| 55.20 | 150.8 | 150.4 | 356.68 | ||
| 91.60 | 123.2 | 123.2 | 338.44 | ||
| 338.8 | −11.88 | −11.88 | 315.12 | ||
| 351.2 | −19.72 | −19.72 | 311.92 | ||
| UDC Clockwise along a Circular Path (Radius 100 m) | |||||
| PSO | 285.6 | 96.00 | 35.36 | 417.08 | |
| PTR | 93.20 | 216.8 | 158.0 | 467.92 | |
| 113.2 | 205.2 | 146.0 | 464.28 | ||
| 179.2 | 166.4 | 107.6 | 453.44 | ||
| 429.2 | 32.32 | −14.28 | 447.36 | ||
| 447.2 | 22.20 | −16.08 | 453.40 | ||
| Strategy | Energy Consumption (kWh) | Travel Distance (km) | Energy Consumption Rate (Wh/km) | Energy Consumption Efficiency (%) |
|---|---|---|---|---|
| Clockwise UDC along a Circular Path (Radius 100 m) | ||||
| TBD | 16.52 | 142.6 | 115.9 | 88.0 |
| PSO | 13.89 | 132.4 | 104.9 | 73.5 |
| 10.11 | 85.9 | 117.7 | 53.3 | |
| 11.10 | 90.6 | 122.5 | 58.6 | |
| 12.76 | 111.9 | 114.1 | 67.4 | |
| 9.91 | 88.2 | 112.4 | 52.2 | |
| 9.64 | 84.5 | 114.0 | 50.8 | |
| UDC on a Straight Road | ||||
| TBD | 18.75 | 214.4 | 87.4 | 99.9 |
| PSO | 12.59 | 167.6 | 75.1 | 67.1 |
| 10.66 | 117.4 | 90.8 | 56.8 | |
| 11.08 | 123.5 | 89.7 | 59.0 | |
| 12.85 | 151.0 | 85.1 | 68.5 | |
| 8.74 | 110.3 | 79.3 | 46.6 | |
| 8.35 | 106.4 | 78.4 | 44.5 | |
| Battery | Front | Rear Left | Rear Right |
|---|---|---|---|
| Energy capacity (kWh) @ 100% SOC | 10.45 | 5.2 | 5.2 |
| Initial SOC (%) | 90 | 90 | 90 |
| Final SOC (%) | 0 | 1.75 | 1.75 |
| Initial battery energy (kWh) | A = (10.45)(0.9) + (5.2)(0.9)(2) = 18.77 | ||
| Total energy consumption (kWh) | B = (10.45)(0.9−0) + (5.2)(0.9-0.0175)(2) = 18.75 | ||
| Energy consumption efficiency | A/B = 18.75/18.77 = 99.89% | ||
| Strategy | Battery Energy Consumption [Wh] | Driving Range (m) | Energy Consumption Rate [Wh/km] | ||
|---|---|---|---|---|---|
| F | RL | RR | |||
| TBD | 797 | 149 | 149 | 5464 | 200 |
| 179 | 515 | 510 | 5424 | 222 | |
| 1318 | 14 | 18 | 5470 | 247 | |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tseng, Y.-H.; Yang, Y.-P. Torque and Battery Distribution Strategy for Saving Energy of an Electric Vehicle with Three Traction Motors. Appl. Sci. 2020, 10, 2653. https://doi.org/10.3390/app10082653
Tseng Y-H, Yang Y-P. Torque and Battery Distribution Strategy for Saving Energy of an Electric Vehicle with Three Traction Motors. Applied Sciences. 2020; 10(8):2653. https://doi.org/10.3390/app10082653
Chicago/Turabian StyleTseng, Yi-Hsiang, and Yee-Pien Yang. 2020. "Torque and Battery Distribution Strategy for Saving Energy of an Electric Vehicle with Three Traction Motors" Applied Sciences 10, no. 8: 2653. https://doi.org/10.3390/app10082653
APA StyleTseng, Y.-H., & Yang, Y.-P. (2020). Torque and Battery Distribution Strategy for Saving Energy of an Electric Vehicle with Three Traction Motors. Applied Sciences, 10(8), 2653. https://doi.org/10.3390/app10082653