
Crawling Magnetic Robot to Perform a Biopsy in Tubular Environments by Controlling a Magnetic Field



Abstract
1. Introduction
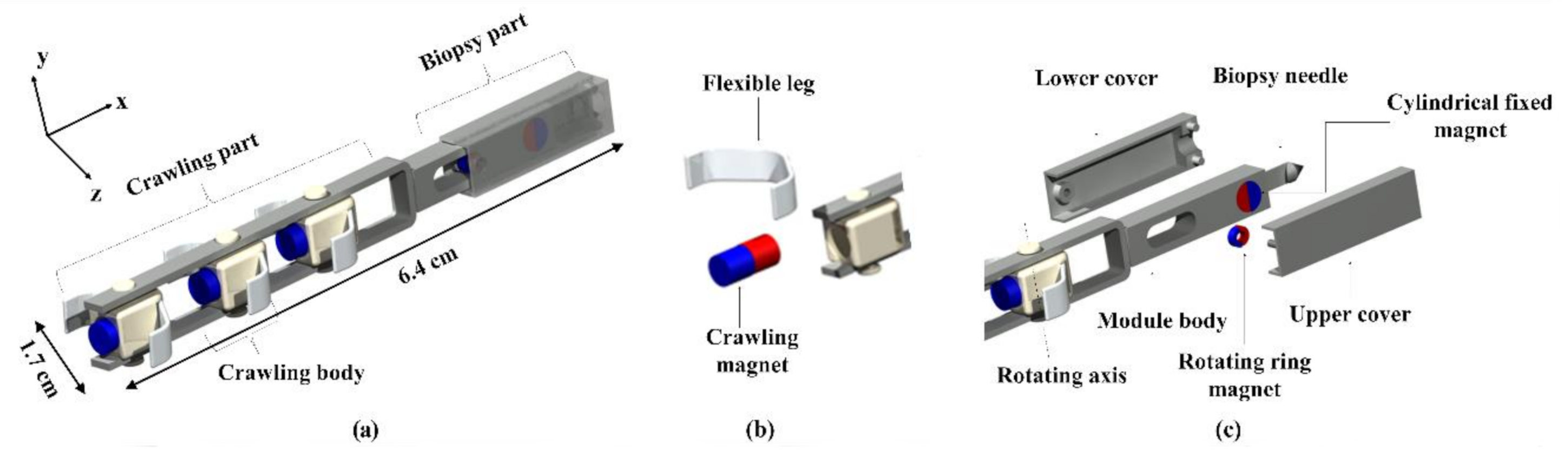
2. Structure of the CMR
3. Actuating Principle of the CMR
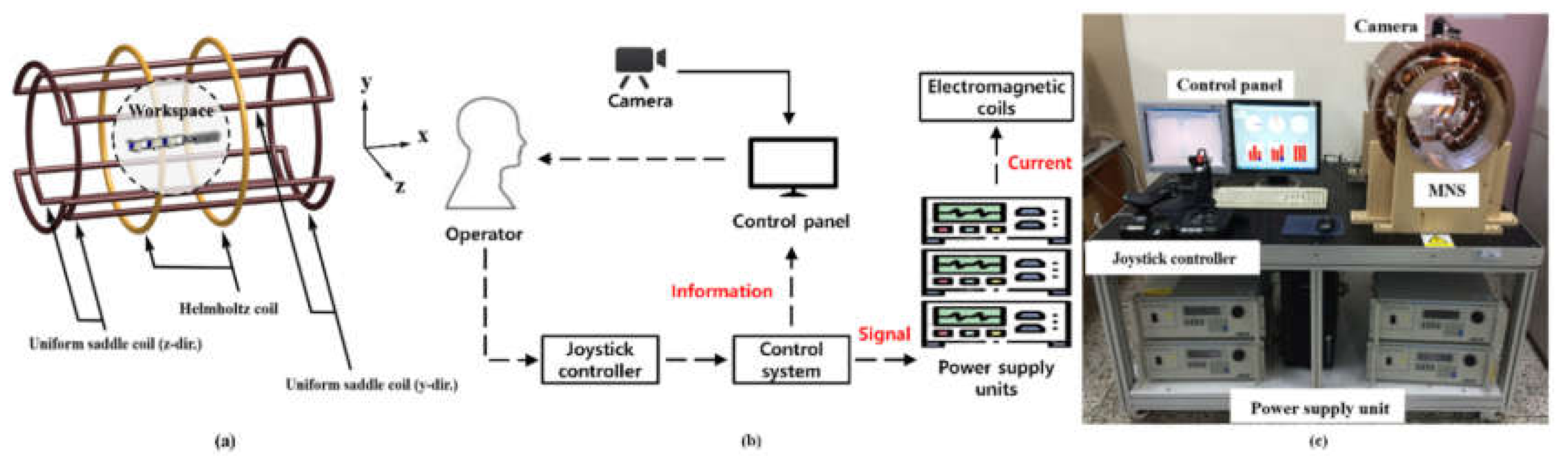
3.1. Magnetic Navigation System
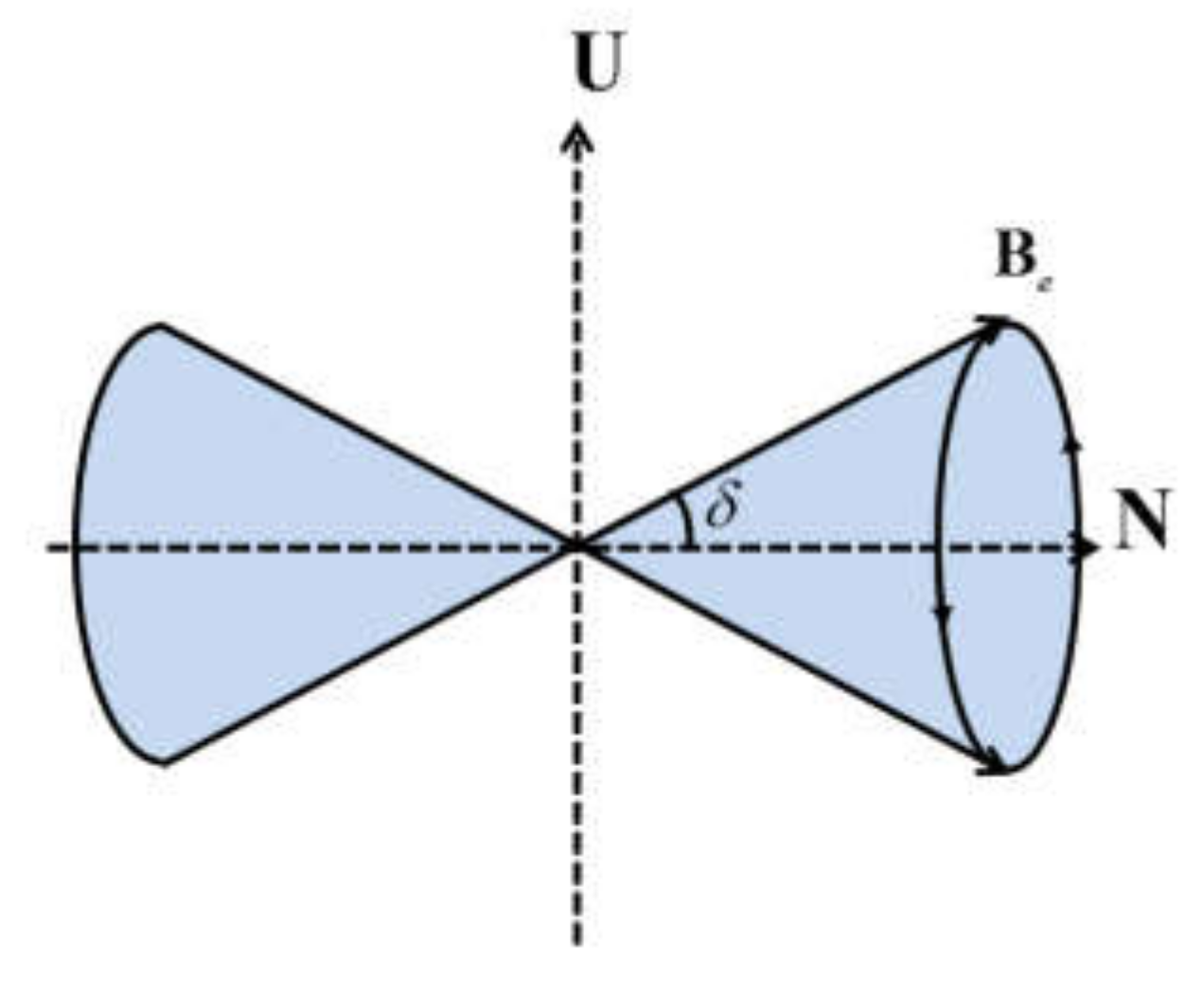
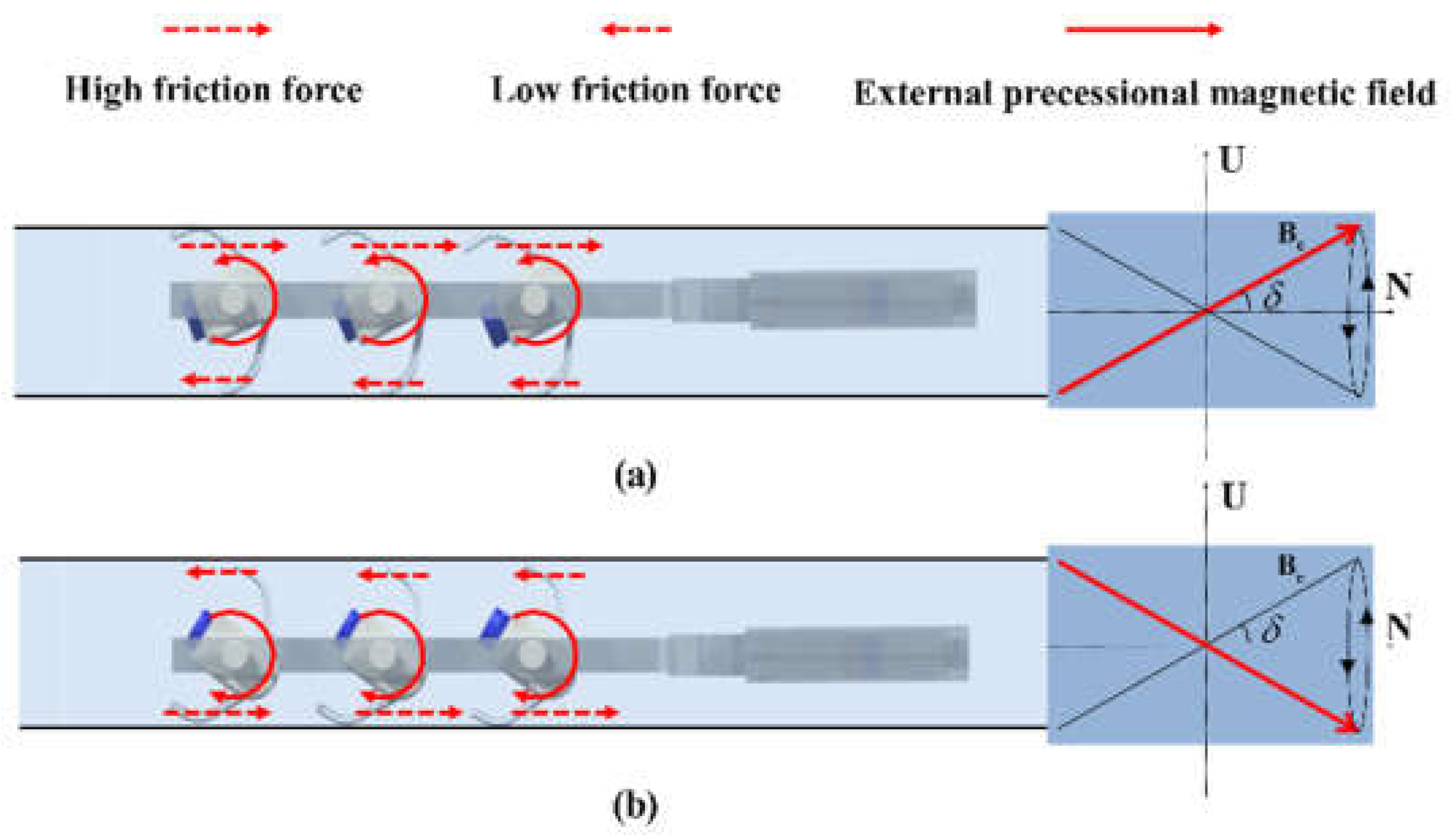
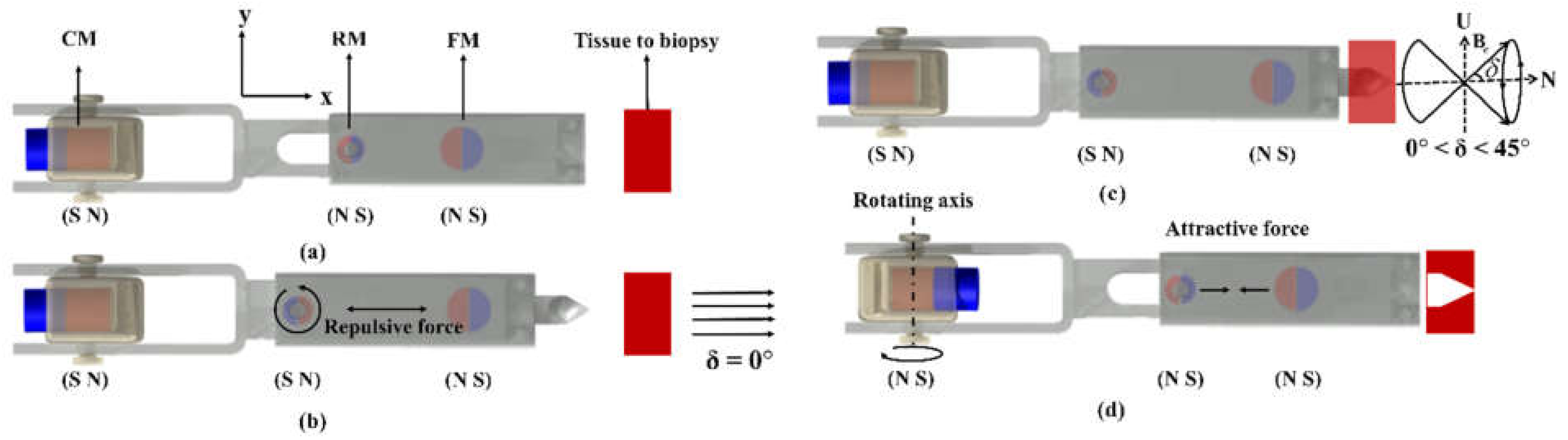
3.2. Crawling Motion under External Precessional Magnetic Field
3.3. Uncovering and Covering Motion of a Biopsy Needle
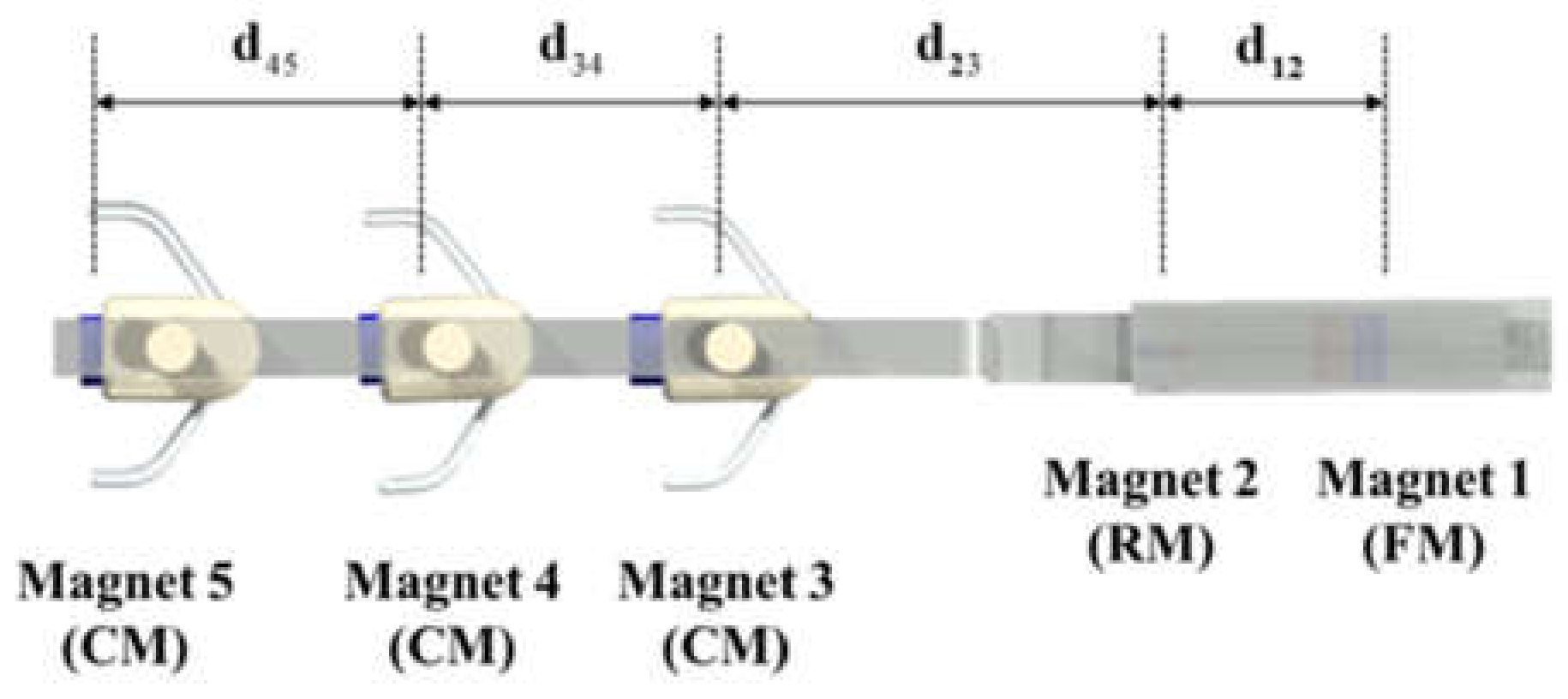
4. Design and Fabrication of the CMR
4.1. Design of the Crawling Part
4.2. Design of the Biopsy Part
4.3. Assembly of the CMR
5. Experiment and Verification
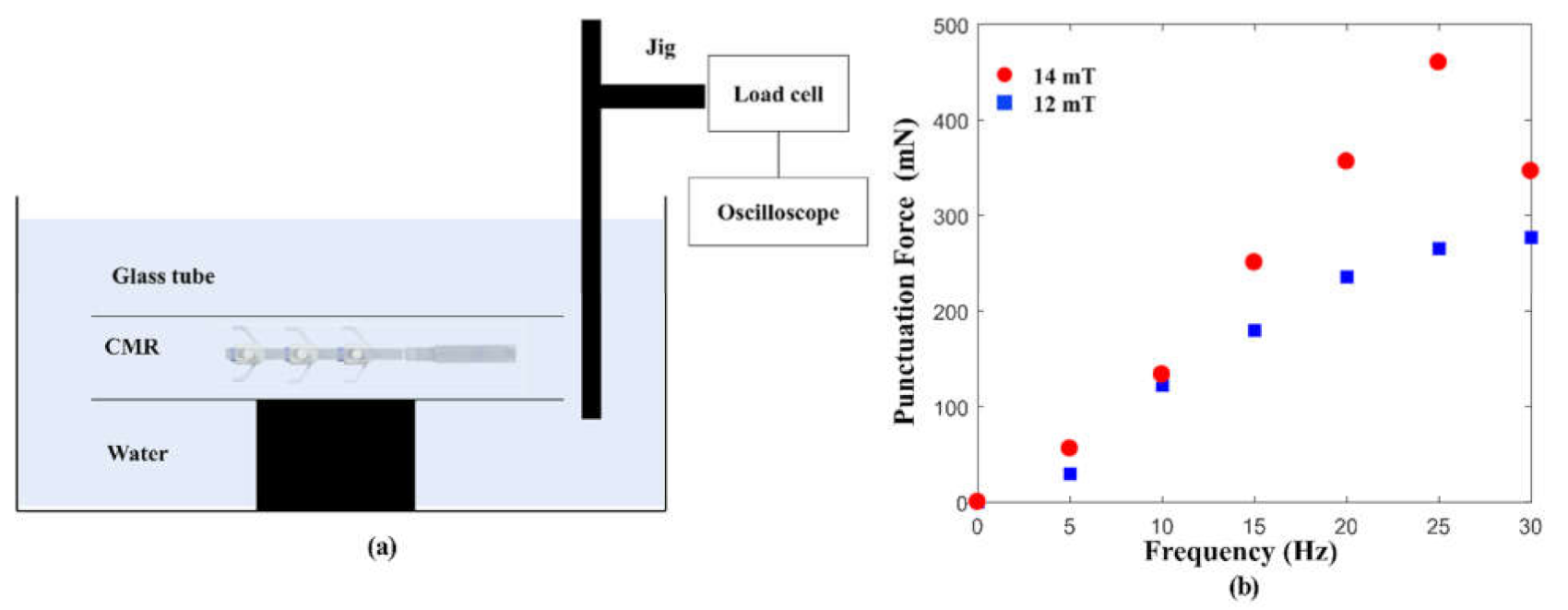
5.1. Verification of Puncturing Force
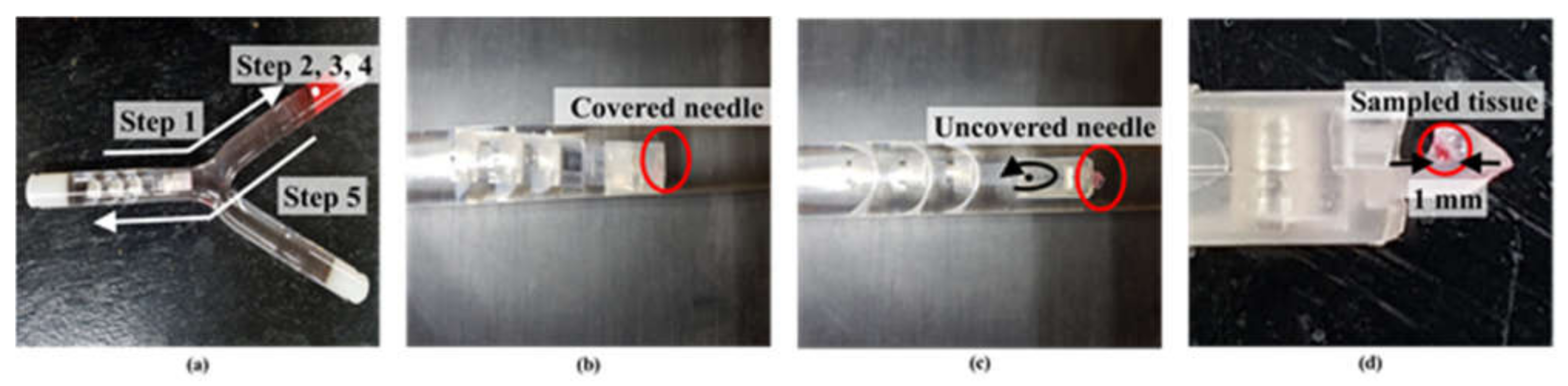
5.2. Verification of Uncovering and Covering Motions for Selective Biopsy
5.3. Experiment in Y-Shaped, Water-Filled Tubular Environment
6. Concluding Remarks
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Rizzo, J.; Bernstein, D.; Gress, F. A performance, safety and cost comparison of reusable and disposable endoscopic biopsy forceps: A prospective, randomized trial. Gastrointest. Endosc. 2000, 51, 257–261. [Google Scholar] [CrossRef]
- Marr, K.A. Catheter-related bacteremia and outcome of attempted catheter salvage in patients undergoing hemodialysis. Ann. Intern. Med. 1997, 127, 275. [Google Scholar] [CrossRef] [PubMed]
- Brun-Buisson, C.; Doyon, F.; Carlet, J. Bacteremia and severe sepsis in adults: A multicenter prospective survey in ICUs and wards of 24 hospitals. French bacteremia-sepsis study group. Am. J. Respir. Crit. Care Med. 1996, 154, 617–624. [Google Scholar] [CrossRef] [PubMed]
- Samore, M.H.; Wessolossky, M.A.; Lewis, S.M.; Shubrooks, S.J., Jr.; Karchmer, A.W. Frequency, risk factors, and outcome for bacteremia after percutaneous transluminal coronary angioplasty. Am. J. Cardiol. 1997, 79, 873–877. [Google Scholar] [CrossRef]
- Park, S.; Koo, K.; Bang, S.M.; Park, J.Y.; Song, S.Y.; Cho, D. ‘Dan’ A novel microactuator for microbiopsy in capsular endoscopes. J. Micromech. Microeng. 2008, 18, 025032. [Google Scholar] [CrossRef]
- Pan, G.; Wang, L. Swallowable wireless capsule endoscopy: Progress and technical challenges. Gastroenterol. Res. Pract. 2011, 2012, e841691. [Google Scholar] [CrossRef]
- Moglia, A.; Menciassi, A.; Schurr, M.O.; Dario, P. Wireless capsule endoscopy: From diagnostic devices to multipurpose robotic systems. Biomed. Microdevices 2007, 9, 235–243. [Google Scholar] [CrossRef]
- Microrobots for minimally invasive medicine. Annu. Rev. Biomed. Eng. 2010, 12, 55–85. [CrossRef]
- Sitti, M.; Ceylan, H.; Hu, W.; Giltinan, J.; Turan, M.; Yim, S.; Diller, E. Biomedical applications of untethered mobile milli/microrobots. Proc. IEEE 2015, 103, 205–224. [Google Scholar] [CrossRef]
- Choi, H.; Choi, J.; Jang, G.; Park, J.; Park, S. Two-dimensional actuation of a microrobot with a stationary two-pair coil system. Smart Mater. Struct. 2009, 18, 055007. [Google Scholar] [CrossRef]
- Wen, L.; Wang, T.; Wu, G.; Liang, J.; Wang, C. Novel method for the modeling and control investigation of efficient swimming for robotic fish. IEEE Trans. Ind. Electron. 2012, 59, 3176–3188. [Google Scholar] [CrossRef]
- Jeon, S.M.; Jang, G.H.; Choi, H.C.; Park, S.H.; Park, J.O. Magnetic navigation system for the precise helical and translational motions of a microrobot in human blood vessels. J. Appl. Phys. 2012, 111, 07E702. [Google Scholar] [CrossRef]
- Kim, S.H.; Hashi, S.; Ishiyama, K. Hybrid magnetic mechanism for active locomotion based on inchworm motion. Smart Mater. Struct. 2013, 22, 027001. [Google Scholar] [CrossRef]
- Fukushi, T.; Kim, S.H.; Hashi, S.; Ishiyama, K. Preliminary validation of Sm–Fe–N magnetic silicone rubber for a flexible magnetic actuator. Smart Mater. Struct. 2014, 23, 067001. [Google Scholar] [CrossRef]
- Yim, S.; Goyal, K.; Sitti, M. Magnetically actuated soft capsule with the multimodal drug release function. IEEE/ASME Trans. Mechatron. 2013, 18, 1413–1418. [Google Scholar] [CrossRef]
- Choi, H.; Cha, K.; Jeong, S.; Park, J.; Park, S. 3-D locomotive and drilling microrobot using novel stationary EMA system. IEEE/ASME Trans. Mechatron. 2013, 18, 1221–1225. [Google Scholar] [CrossRef]
- Nam, J.; Jeon, S.; Kim, S.; Jang, G. Crawling microrobot actuated by a magnetic navigation system in tubular environments. Sens. Actuators A Phys. 2014, 209, 100–106. [Google Scholar] [CrossRef]
- Jeon, S.; Jang, G. Precise manipulation of a microrobot in the pulsatile flow of human blood vessels using magnetic navigation system. J. Appl. Phys. 2011, 109, 07B316. [Google Scholar] [CrossRef]
- Lee, W.; Jeon, S.; Nam, J.; Jang, G. Dual-body magnetic helical robot for drilling and cargo delivery in human blood vessels. J. Appl. Phys. 2015, 117, 17B314. [Google Scholar] [CrossRef]
- Lee, W.; Nam, J.; Kim, J.; Jung, E.; Jang, G. Effective locomotion and precise unclogging motion of an untethered flexible-legged magnetic robot for vascular diseases. IEEE Trans. Ind. Electron. 2018, 65, 1388–1397. [Google Scholar] [CrossRef]
- Kim, S.; Jang, G.; Jeon, S.; Nam, J. A crawling and drilling microrobot driven by an external oscillating or precessional magnetic field in tubular environments. J. Appl. Phys. 2015, 117, 17A703. [Google Scholar] [CrossRef]
- Lee, W.; Nam, J.; Jang, B.; Jang, G. Selective motion control of a crawling magnetic robot system for wireless self-expandable stent delivery in narrowed tubular environments. IEEE Trans. Ind. Electron. 2017, 64, 1636–1644. [Google Scholar] [CrossRef]
- Jeon, S.; Jang, G.; Choi, H.; Park, S. Magnetic navigation system with gradient and uniform saddle coils for the wireless manipulation of micro-robots in human blood vessels. IEEE Trans. Magn. 2010, 46, 1943–1946. [Google Scholar] [CrossRef]
- Yang, H.; Liu, P.X.; Zhang, J. Modelling of needle insertion forces for surgical simulation. In Proceedings of the IEEE International Conference Mechatronics and Automation, Niagara Falls, ON, Canada, 29 July–1 August 2005; Volume 2, pp. 592–595. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Variable | Value |
|---|---|---|
| Distance between magnets | d12 | 8.0 mm |
| d23 | 18.5 mm | |
| d34 | 13.0 mm | |
| d45 | 13.0 mm | |
| Fixed cylindrical magnet | Diameter | 3.0 mm |
| Length | 3.0 mm | |
| Grade | N52 | |
| Magnetic moment | 0.0245 | |
| Rotating ring magnet | Outer diameter | 2.0 mm |
| Inner diameter | 1.0 mm | |
| Length | 0.8 mm | |
| Grade | N52 | |
| Magnetic moment | 0.0022 | |
| Crawling magnet | Diameter | 3.0 mm |
| Length | 6.0 mm | |
| Grade | N52 | |
| Magnetic moment | 0.0490 | |
| Flexible leg | Length | 25 mm |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jung, E.; Nam, J.; Lee, W.; Kim, J.; Jang, G. Crawling Magnetic Robot to Perform a Biopsy in Tubular Environments by Controlling a Magnetic Field. Appl. Sci. 2021, 11, 5292. https://doi.org/10.3390/app11115292
Jung E, Nam J, Lee W, Kim J, Jang G. Crawling Magnetic Robot to Perform a Biopsy in Tubular Environments by Controlling a Magnetic Field. Applied Sciences. 2021; 11(11):5292. https://doi.org/10.3390/app11115292
Chicago/Turabian StyleJung, Eunsoo, Jaekwang Nam, Wonseo Lee, Jongyul Kim, and Gunhee Jang. 2021. "Crawling Magnetic Robot to Perform a Biopsy in Tubular Environments by Controlling a Magnetic Field" Applied Sciences 11, no. 11: 5292. https://doi.org/10.3390/app11115292
APA StyleJung, E., Nam, J., Lee, W., Kim, J., & Jang, G. (2021). Crawling Magnetic Robot to Perform a Biopsy in Tubular Environments by Controlling a Magnetic Field. Applied Sciences, 11(11), 5292. https://doi.org/10.3390/app11115292