Automated Parking Space Allocation during Transition with both Human-Operated and Autonomous Vehicles

Abstract
:1. Introduction
1.1. Motivation for Research
1.2. Organization and Contributions of This Paper
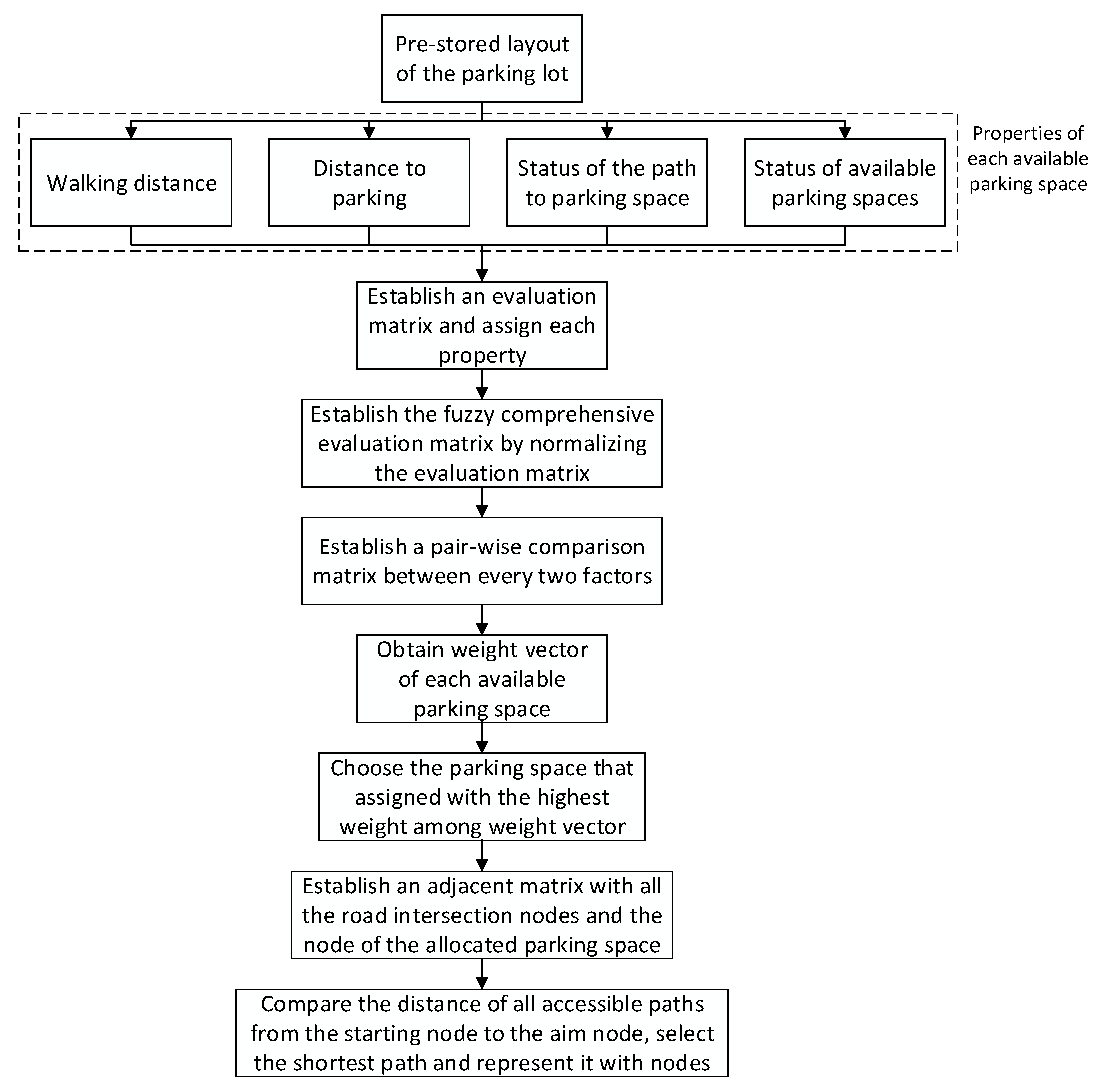
- In this paper, a fuzzy comprehensive evaluation method is used to first predict the parking preference of a driver based on four main factors that influence their choice of parking spaces. This procedure prevents conflict of allocation of parking space to the AV with that chosen by the HV.
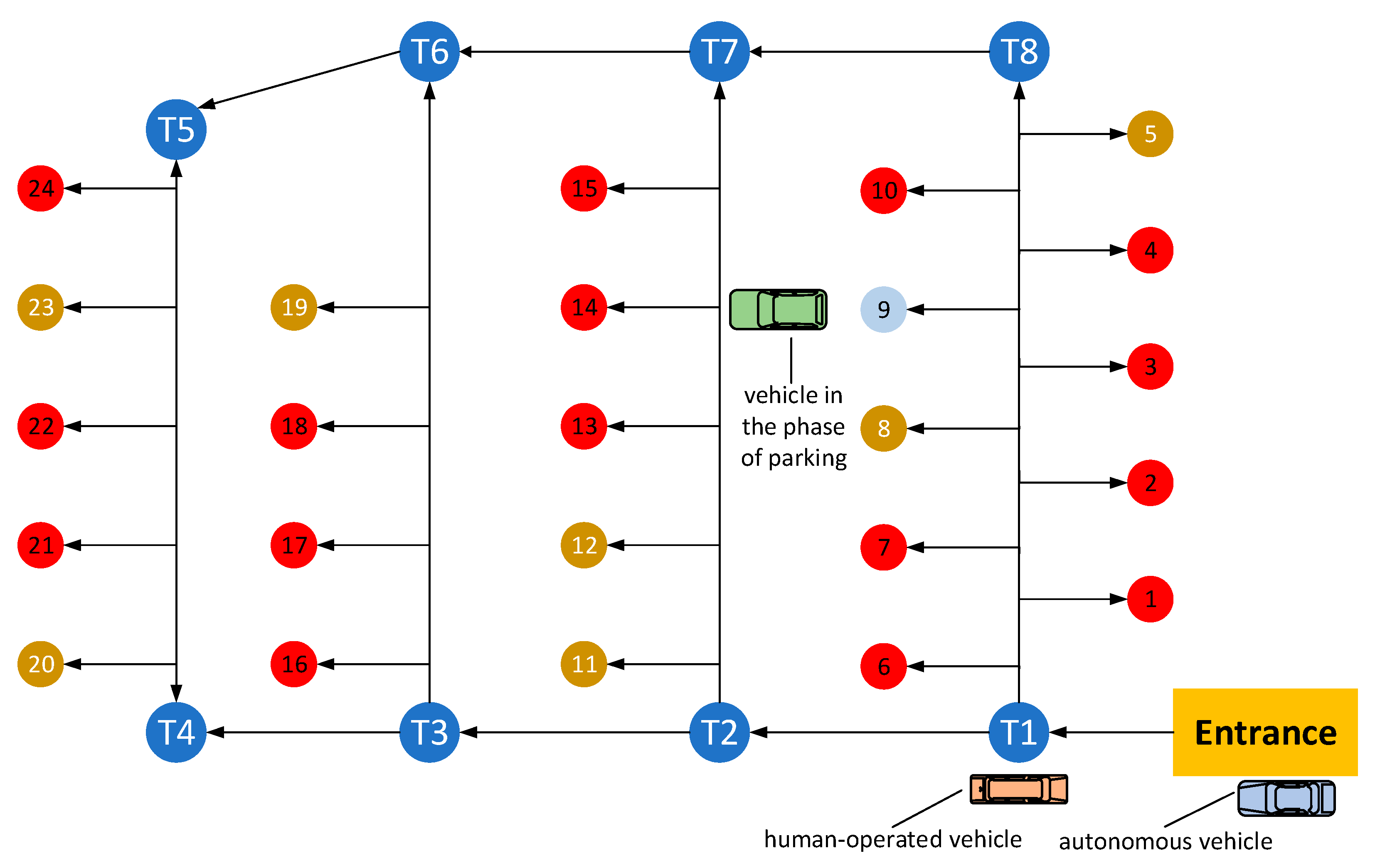
- Based on the node information in a parking infrastructure, the Floyd algorithm is used to provide path navigation for the AVs.
- The proposed methodology, combining fuzzy theory and the Floyd algorithm, provides a novel scheme for a central command station to assign parking spaces for AVs in the presence of HVs. The merit of this work thus provides a foundation for future work to investigate the problem of automated parking for multiple vehicles.
2. Review of Related Work
3. Factors for Choosing Optimal Parking Spaces
- Walking distance
- Distance to parking
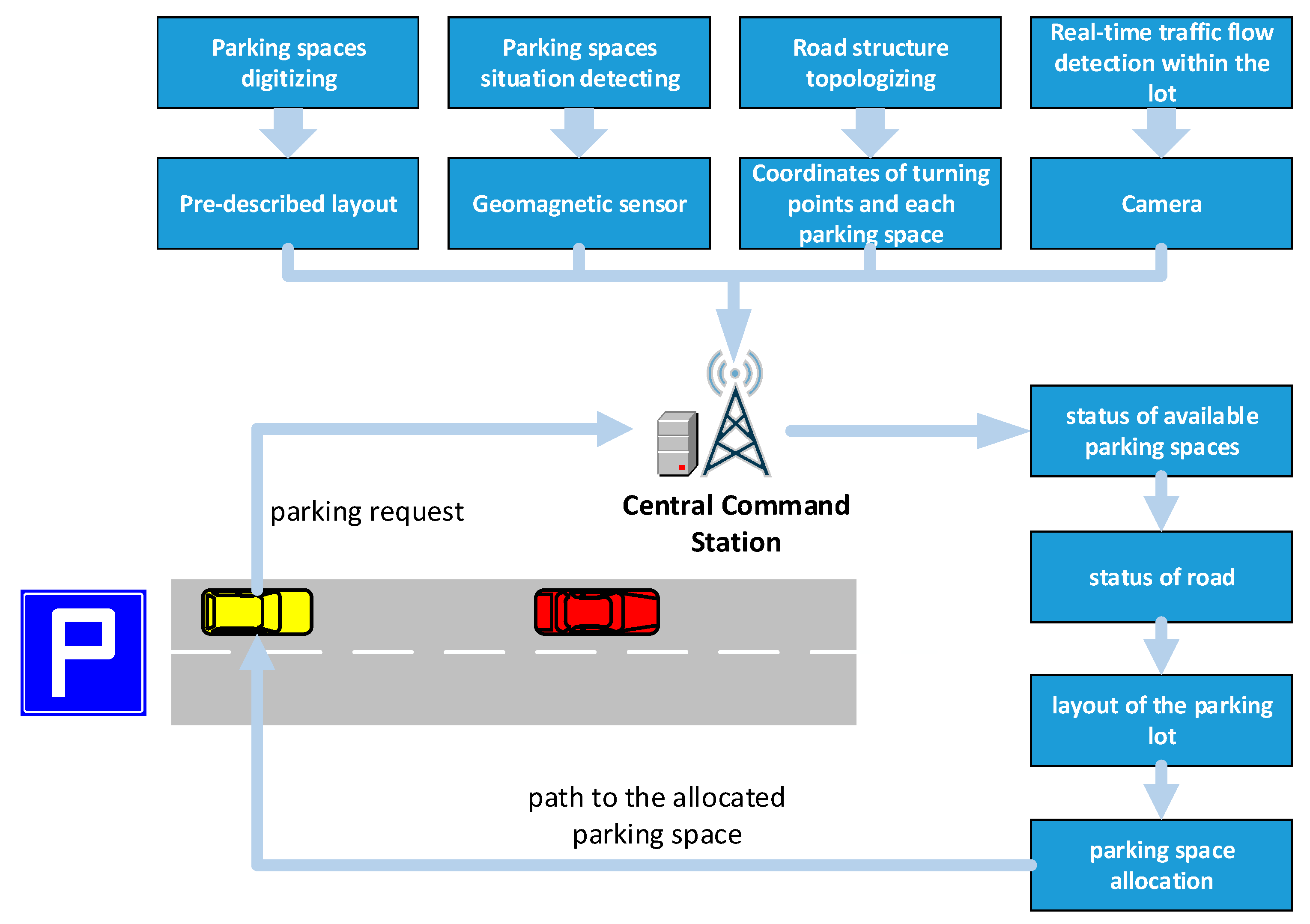
- Status of the path to the parking spaces
- Status of available parking spaces
4. Optimal Parking Space Selection Model
- (1)
- Establish a factor vector where is the factor that affects the parking selection. These factors usually have varying degrees of fuzziness.In this paper, the factor vector for evaluating parking preference is , where represents “walking distance”, “distance to parking”, “status of lane to the parking spaces” and “status of available parking spaces”.
- (2)
- Establish an evaluation matrix whose -th row, , is the evaluation vector for the -th available parking space, and is the evaluation value for the factor in .In this paper, the evaluation vector for evaluating each factor in the vector is for the i-th parking space, where are defined as the actual values of “walking distance” and “distance to parking” for evaluating and , respectively; and are the scores under the evaluation standard discussed in Section 3 for evaluating the “status of lane to the parking spaces” and “status of available parking spaces” , respectively.
- (3)
- Establish the fuzzy comprehensive evaluation matrix by normalizing , where is the total number of targeted parking spaces that need to be evaluated and is the number of factors.
- (1)
- According to [29], to eliminate a potentially large number of combinatorial comparisons due to a large dimension of the factor vector, it is necessary to evaluate the independent relationship between every two factors by the pair-wise comparison matrix which is defined by drivers with different driving experiences, where , , and . represent the value of factor compared to the preference to factor , represents the value of a factor compared to the preference to itself.In this paper, we have collected opinions from twenty drivers to form the pair-wise comparison matrix. Our sample included five males and five females, with ages varying from 20 to 55 years old and with driving experiences ranging from less than one month to more than 35 years. This set of samples represents sufficiently broad variability.
- (2)
- Define the weight vector of the factors: , where can be calculated by the least variance method (LVM) for further ranking priority of the factors based on the pair-wise comparison matrix. [30]:
- (3)
- According to Equations (1)–(3) we established a priority vector , which can be described as follows:where, is the weighted arithmetic average operator. The higher the weight value of a certain parking space in , the more likely it would be selected by the driver [31].
5. Optimal Route Selection
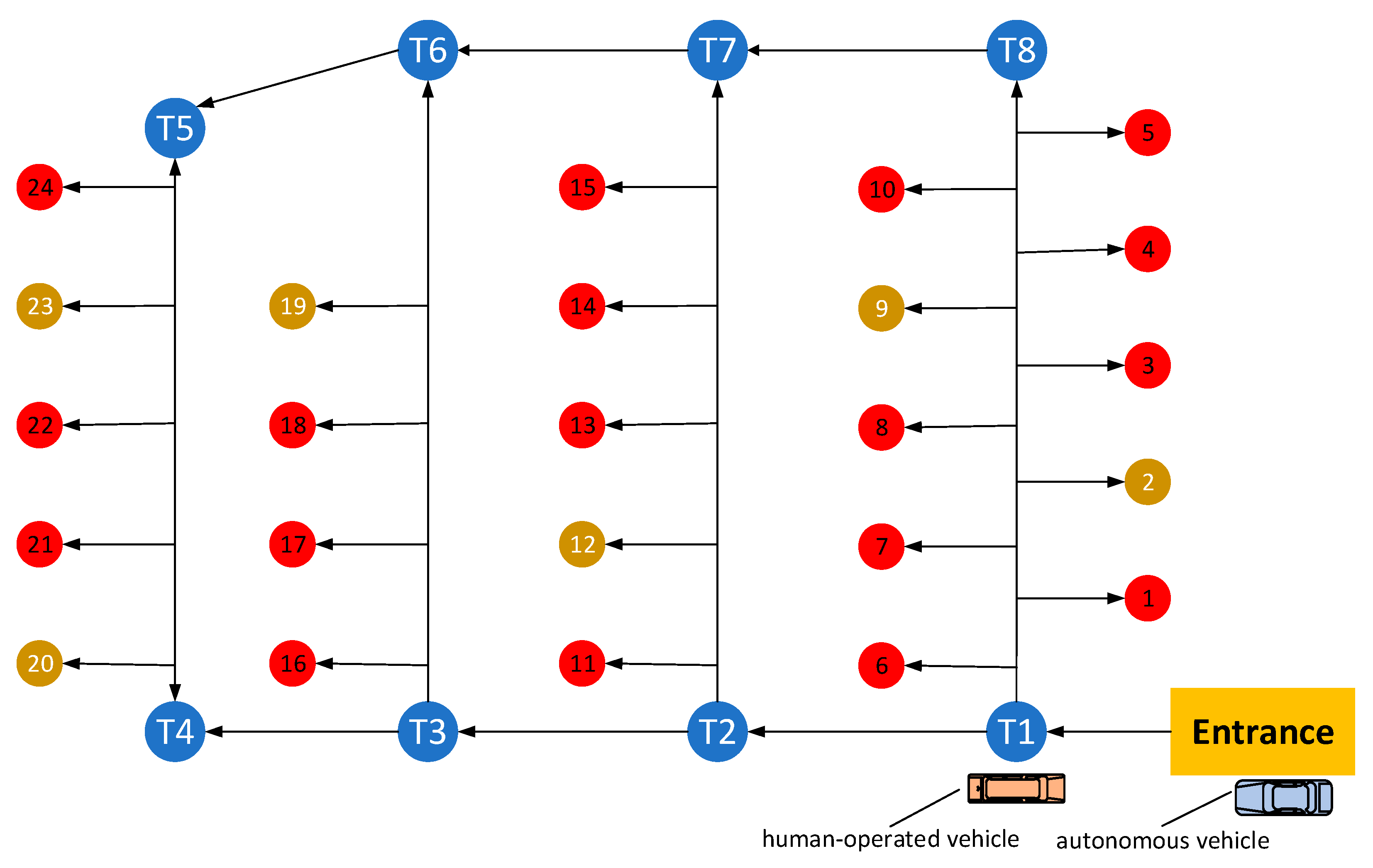
- (1)
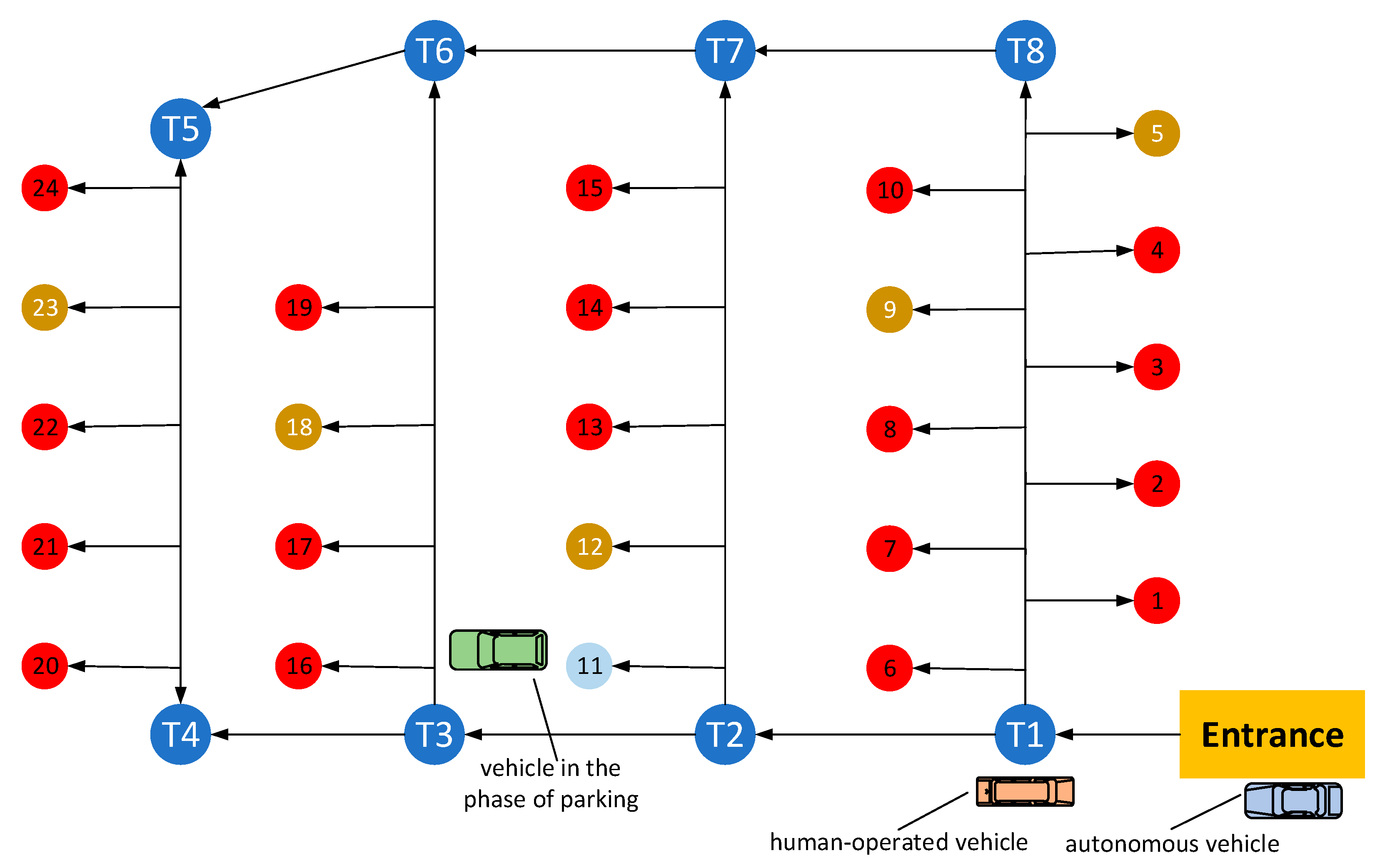
- Number each parking location in the map as a node;
- (2)
- Initialize an adjacent matrix , where represents the distance between node and ; if and are not adjacent, will be assigned with ; if , the value of will be .
- (3)
- Update the transfer function. For example, consider three nodes ,, and in the map, where is an intermediate node of and , and and represents the start point and the end point, respectively. The transfer function is updated by to select the smaller of the two distances from to and from to to . The Floyd algorithm finds an intermediate node to determine whether there is a shorter distance through this node .
6. Example: Results and Discussion
7. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kim, O.T.T.; Tran, N.H.; Pham, C.; Leanh, T.; Thai, M.T.; Hong, C.S. Parking Assignment: Minimizing Parking Expenses and Balancing Parking Demand among Multiple Parking Lots. IEEE Trans. Autom. Sci. Eng. 2020, 17, 1320–1331. [Google Scholar]
- Nawaz, S.; Efstratiou, C.; Mascolo, C. ParkSense: A Smartphone Based Sensing System for On-Street Parking. In Proceedings of the 19th International Conference on Mobile Computing & Networking, Miami, FL, USA, 30 Sepetember–4 October 2013. [Google Scholar]
- Jang, C.; Kim, C.; Lee, S.; Kim, S.; Lee, S.; Sunwoo, M. Re-Plannable Automated Parking System with a Standalone around View Monitor for Narrow Parking Lots. IEEE Trans. Intell. Transp. Syst. 2020, 21, 777–790. [Google Scholar] [CrossRef]
- Li, C.X. Research on Automatic Vertical Parking System Based on Intelligent Recognition Technology of Parking Space Scene. Ph.D. Thesis, Jiangsu University, Zhenjiang, China, 2016. [Google Scholar]
- Schwarz, S.; Zochmann, E.; Muller, M.; Guan, K. Dependability of Directional Millimeter Wave Vehicle-to-Infrastructure Communications. IEEE Access 2020, 8, 53162–53171. [Google Scholar] [CrossRef]
- Sedighi, S.; Nguyen, D.V.; Kuhnert, K.D. Guided Hybrid A-star Path Planning Algorithm for Valet Parking Applications. In Proceedings of the 5th IEEE International Conference on Control, Automation and Robotics (ICCAR), Beijing, China, 19–22 April 2019. [Google Scholar]
- Shih, S.; Tsai, W. A Convenient Vision-Based System for Automatic Detection of Parking Spaces in Indoor Parking Lots Using Wide-Angle Cameras. IEEE Trans. Veh. Technol. 2014, 63, 2521–2532. [Google Scholar] [CrossRef] [Green Version]
- Mohandes, M.; Deriche, M.; Abuelma’atti, M.T.; Tasadduq, N. Preference-based smart parking system in a university campus. IET Intell. Transp. Syst. 2019, 13, 417–423. [Google Scholar] [CrossRef]
- Liang, W.; Hu, J.M.; Zhang, Y.; Zhang, Z.; Wang, Z.W. Modeling and empirical analyses of parking space choices based on individual preferences. Tsinghua Univ. (Sci. Technol.) 2017, 57, 100–106. [Google Scholar]
- Leephakpreeda, T. Car-parking guidance with fuzzy knowledge-based decision making. Build. Environ. 2007, 42, 803–809. [Google Scholar] [CrossRef]
- Marina, D.; Vladislav, L.; Inna, S.; Igor, K. Parking Guide Service for Large Urban Areas. In Proceedings of the 10th IEEE International Conference on Intelligent Data Acquisition and Advanced Computing Systems: Technology and Applications (IDAACS), Metz, France, 18–21 September 2019. [Google Scholar]
- Nesic, Z.; Ljubic, L.; Radojicic, M.; Vasovic, J.V. Some considerations on improvement of parking service information system. In Proceedings of the 24th Telecommunications Forum (TELFOR), Belgrade, Serbia, 22–23 November 2016. [Google Scholar]
- Dijkstra, E.W. A Note on Two Problems in Connexion with Graphs. Numer. Math. 1959, 1, 269–271. [Google Scholar] [CrossRef] [Green Version]
- Floyd, R.W. Algorithm 97: Shortest path. Commun. ACM 1962, 5, 345. [Google Scholar] [CrossRef]
- Shi, W.; Wang, K. Floyd algorithm for the shortest path planning of mobile robot. Chin. J. Sci. Instrum. 2009, 10, 2088–2092. [Google Scholar]
- Ji, Y.J.; Wang, W.; Deng, W. Micro-level parking behaviors within parking facilities and optimal parking space choice model. J. Southeast Univ. (Nat. Sci. Ed.) 2009, 2, 399–403. [Google Scholar]
- Banzhaf, H.; Nienhuser, D.; Knoop, S.; Zollner, J.M. The future of parking: A survey on automated valet parking with an outlook on high density parking. Proceeding of the IEEE Intelligent Vehicles Symposium (IV), Los Angeles, CA, USA, 11–14 June 2017. [Google Scholar]
- Dou, Y.X.; Zhang, M.M.; Zhang, J.; Fan, X.Y. Study on Dynamic Distribution Algorithm in Parking. J. Zhenzhou Univ. Light Ind. 2012, 6, 24–27. [Google Scholar]
- Audi Industrial Group. Audi Technology Portal. Available online: https://www.audi-technology-portal.de/en/electrics-electronics/driver-assistant-systems/parking-assist (accessed on 10 September 2020).
- Alfatihi, S.; Chihab, S.; Alj, Y.S. Intelligent Parking System for Car Parking Guidance and Damage Notification. In Proceedings of the International Conference on Intelligent Systems Modelling & Simulation, Bangkok, Thailand, 29–31 January 2013. [Google Scholar]
- Kotb, A.O.; Shen, Y.C.; Zhu, X.; Huang, Y. iParker—A New Smart Car-Parking System Based on Dynamic Resource Allocation and Pricing. IEEE Trans. Intell. Transp. Syst. 2016, 17, 2637–2647. [Google Scholar] [CrossRef] [Green Version]
- Tcheumadjeu, L.C.T.; Andert, F.; Tang, Q.; Sohr, A.; Stürzl, W. Integration of an Automated Valet Parking Service into an Internet of Things Platform. In Proceedings of the 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018. [Google Scholar]
- Yu, L.Y.; Jiang, H.B.; Hua, L. Anti-Congestion Route Planning Scheme Based on Dijkstra Algorithm for Automatic Valet Parking System. Appl. Sci. 2019, 9, 5016. [Google Scholar] [CrossRef] [Green Version]
- Xiao, W.; Zhang, L.; Qiu, Z.H.; Zhong, Y.; Zhang, T.N. Design of Parking Lot Path Guidance System Based on Multi-objective Point A* Algorithm. Comput. Mod. 2020, 6, 40–45. [Google Scholar]
- Chen, M.; Hu, C.; Chang, T. The Research on Optimal Parking Space Choice Model in Parking Lots. In Proceedings of the 3th International Conference on Computer Research and Development (ICCRD), Shanghai, China, 11–13 March 2011. [Google Scholar]
- Ma, J. Design and Implementation of Parking Space Recommendation System Considering User Preference. Master’s Thesis, Henan University, Henan, China, 2018. [Google Scholar]
- Chen, J. Study on Urban Parking Facilities’ Planning Methods. Ph.D. Thesis, Southeast University, Nanjing, China, 2000. [Google Scholar]
- Zadeh, L.A. Fuzzy sets. Inf. Control 1965, 8, 338–353. [Google Scholar] [CrossRef] [Green Version]
- Xu, Z.S. Uncertain Multiple Attribute Decision Making: Methods and Applications; Tsinghua University Press: Beijing, China, 2004. [Google Scholar]
- Xu, Z.S. The Least Variance Priority Method (LVM) for Fuzzy Complementary Judgement Matrix. Syst. Eng. Theory Pract. 2001, 21, 93–96. [Google Scholar]
- Waerden, P.; Borgers, A.; Timmermans, H. Travelers Micro-Behavior at Parking Lots: A Model of Parking Choice Behavior. In Proceedings of the 82nd Annual Meeting of the Transportation Research Board, Washington, DC, USA, 12–16 January 2003. [Google Scholar]
- Sathyaraj, B.M.; Jain, L.C.; Finn, A.; Drake, S. Multiple UAVs path planning algorithms: A comparative study. Fuzzy Optim. Decis. Mak. 2008, 7, 257–267. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parking Space | Walking Distance (m) | Distance to Parking (m) | Status of Parking | Status of Available Parking Spaces |
|---|---|---|---|---|
| 5 | 51.0 | 36.7 | clear | adjacent to the road |
| 9 | 44.3 | 30.0 | clear | both sides are occupied |
| 12 | 27.8 | 36.5 | occupied | both sides are occupied |
| 18 | 41.8 | 27.5 | clear | both sides are occupied |
| 23 | 11.1 | 63.6 | clear | both sides are occupied |
| Parking Space | Walking Distance (m) | Distance to Parking (m) | Status of Parking | Status of Available Parking Spaces |
|---|---|---|---|---|
| 2 | 43.5 | 29.2 | clear | both sides are occupied |
| 9 | 44.3 | 30.0 | clear | both sides are occupied |
| 12 | 27.8 | 36.5 | clear | both sides are occupied |
| 19 | 21.8 | 42.5 | clear | adjacent to the road |
| 20 | 3.2 | 55.7 | clear | adjacent to the road |
| 23 | 11.1 | 63.6 | clear | both sides are occupied |
| Parking Space | Walking Distance (m) | Distance to Parking (m) | Status of Parking | Status of Available Parking Spaces |
|---|---|---|---|---|
| 5 | 51.0 | 36.7 | clear | adjacent to the road |
| 8 | 41.8 | 27.5 | clear | both sides are occupied |
| 11 | 25.3 | 34.0 | clear | adjacent to the road |
| 12 | 27.8 | 36.5 | clear | one adjacent space unoccupied |
| 19 | 21.8 | 42.5 | clear | adjacent to the road |
| 20 | 3.2 | 55.7 | clear | adjacent to the road |
| 23 | 11.1 | 63.6 | clear | both sides are occupied |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, M.; Jiang, H.; Tan, C.-A. Automated Parking Space Allocation during Transition with both Human-Operated and Autonomous Vehicles. Appl. Sci. 2021, 11, 855. https://doi.org/10.3390/app11020855
Wu M, Jiang H, Tan C-A. Automated Parking Space Allocation during Transition with both Human-Operated and Autonomous Vehicles. Applied Sciences. 2021; 11(2):855. https://doi.org/10.3390/app11020855
Chicago/Turabian StyleWu, Mingkang, Haobin Jiang, and Chin-An Tan. 2021. "Automated Parking Space Allocation during Transition with both Human-Operated and Autonomous Vehicles" Applied Sciences 11, no. 2: 855. https://doi.org/10.3390/app11020855
APA StyleWu, M., Jiang, H., & Tan, C.-A. (2021). Automated Parking Space Allocation during Transition with both Human-Operated and Autonomous Vehicles. Applied Sciences, 11(2), 855. https://doi.org/10.3390/app11020855