
Dynamic Stall Characteristics of the Bionic Airfoil with Different Waviness Ratios


Abstract
:1. Introduction
2. Materials and Methods
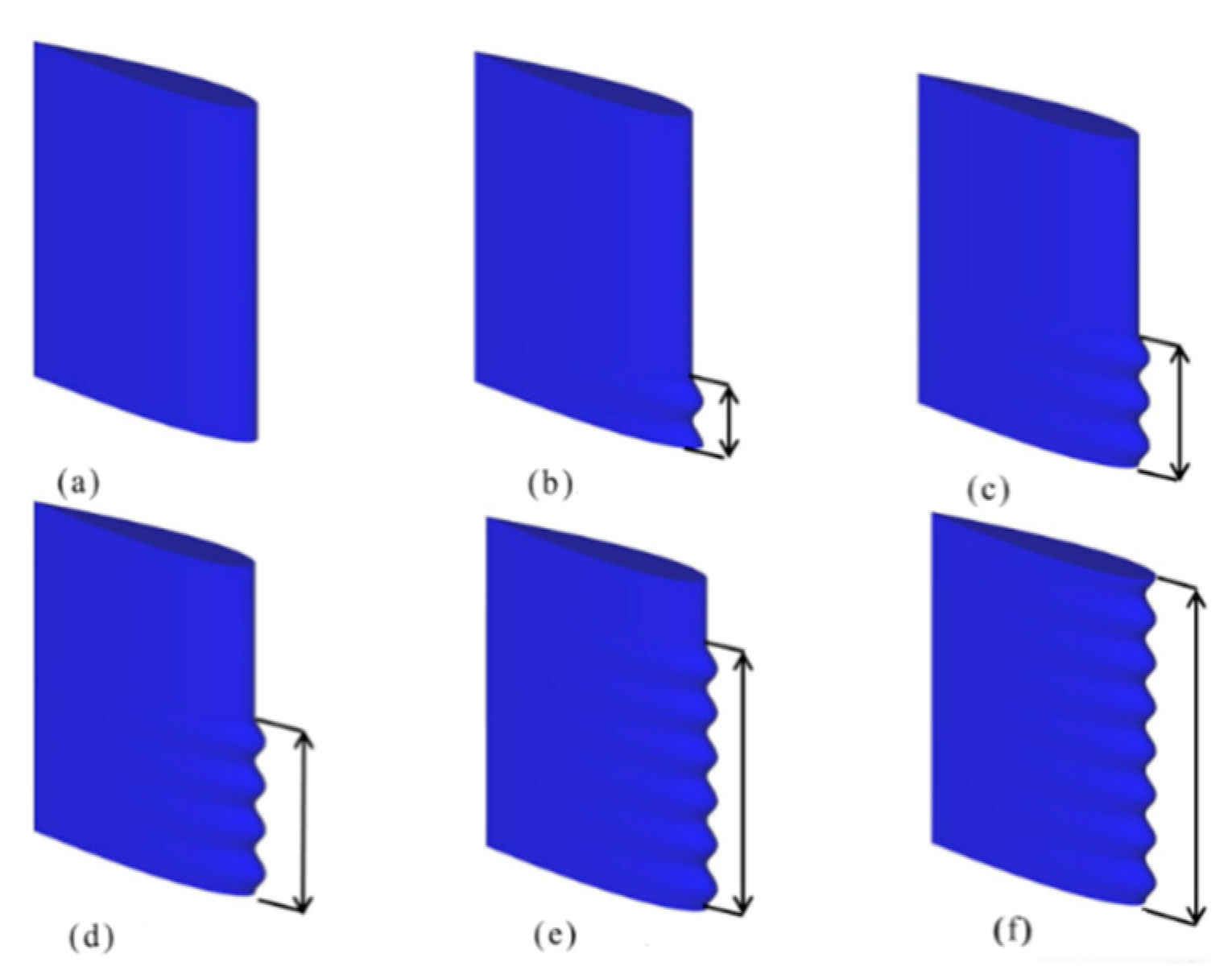
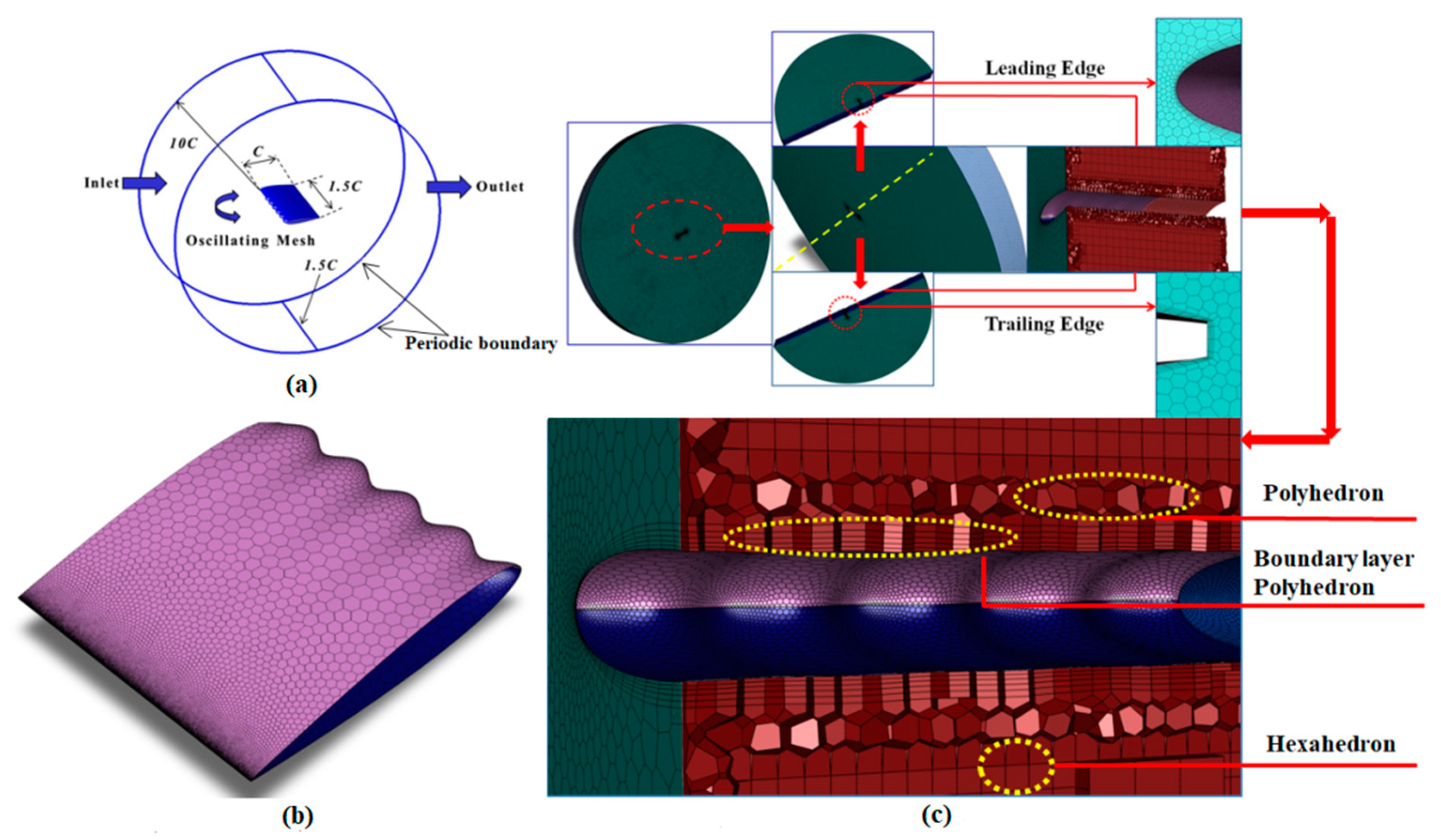
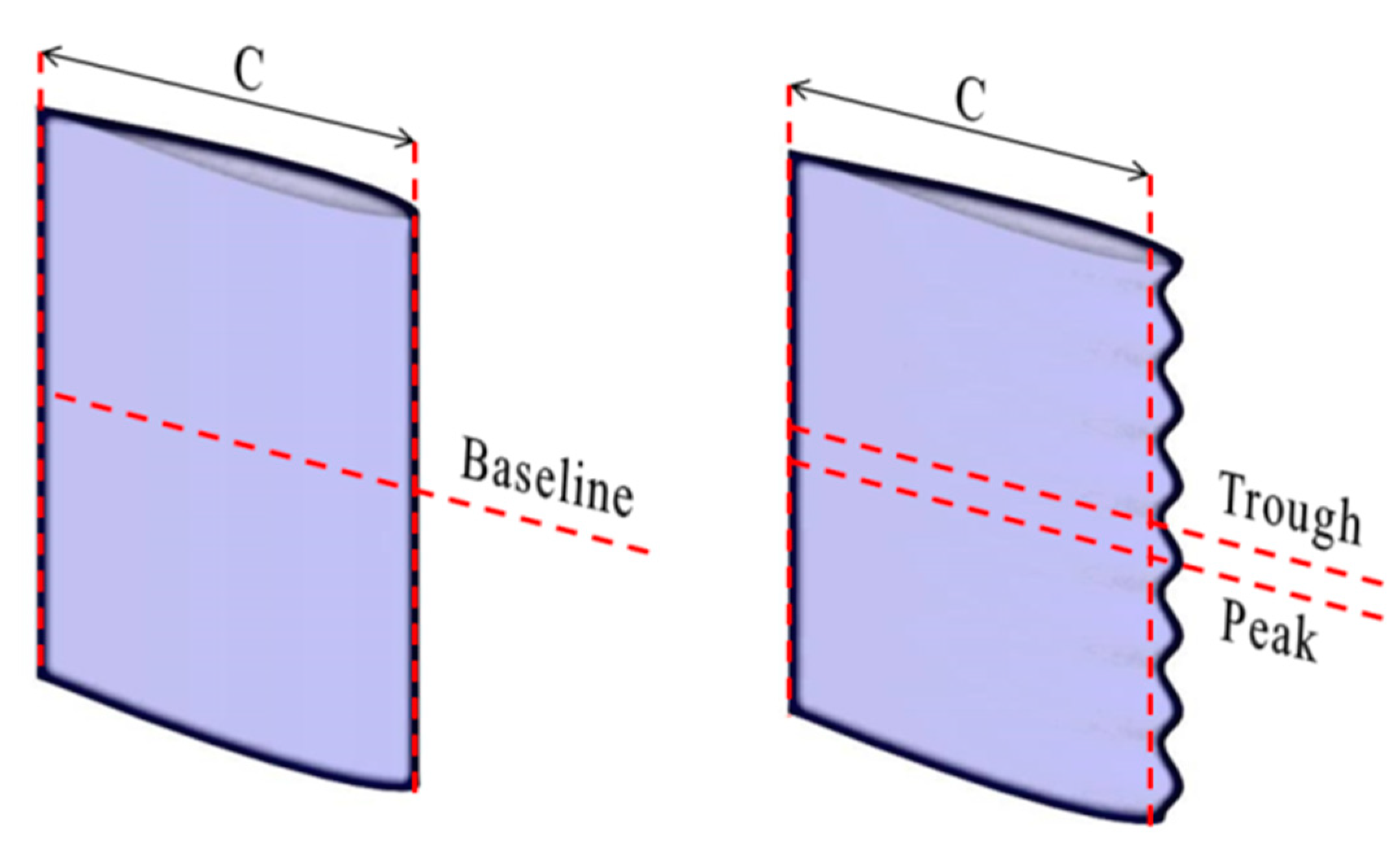
2.1. The Geometric Model and Grids
2.2. The Law of the Oscillating Airfoil
2.3. Control Equation and Turbulence Model
3. The Numerical Calculation Verification
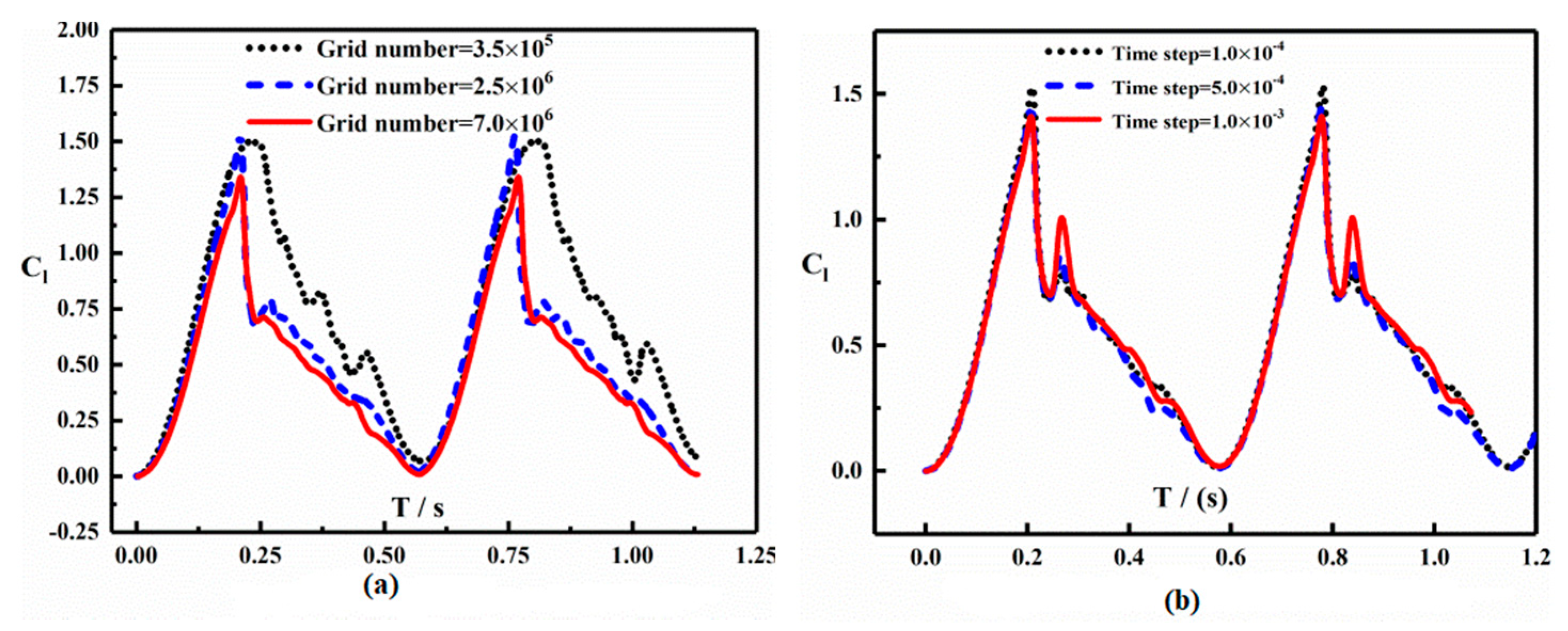
3.1. Sensitivity Analysis of Calculation Results
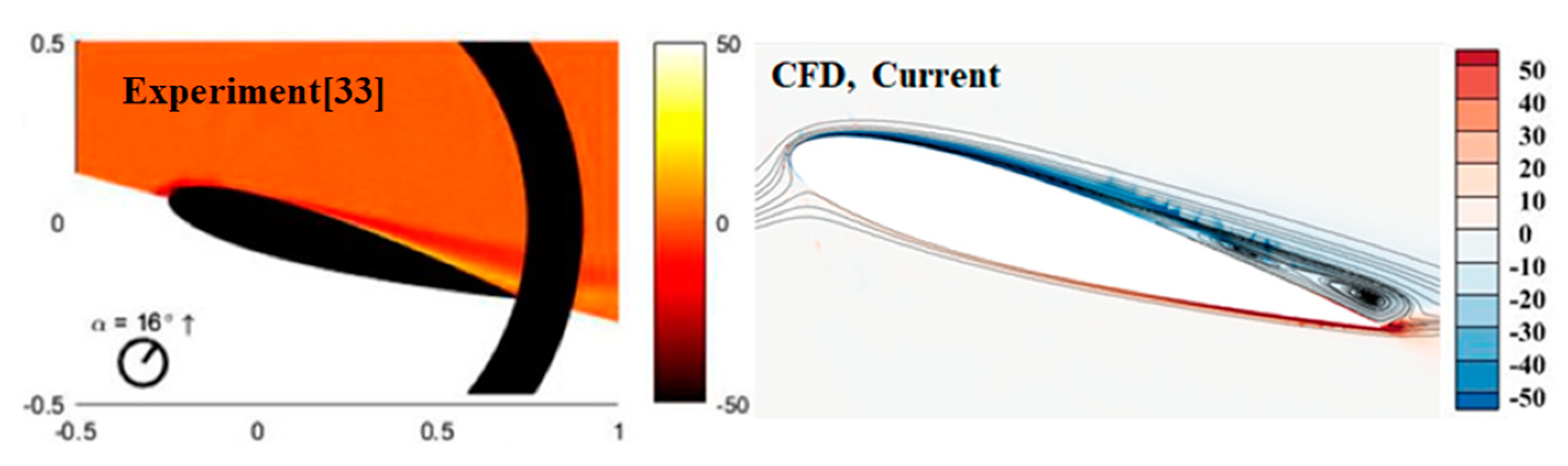
3.2. Numerical Simulation Validation
4. Results and Analysis
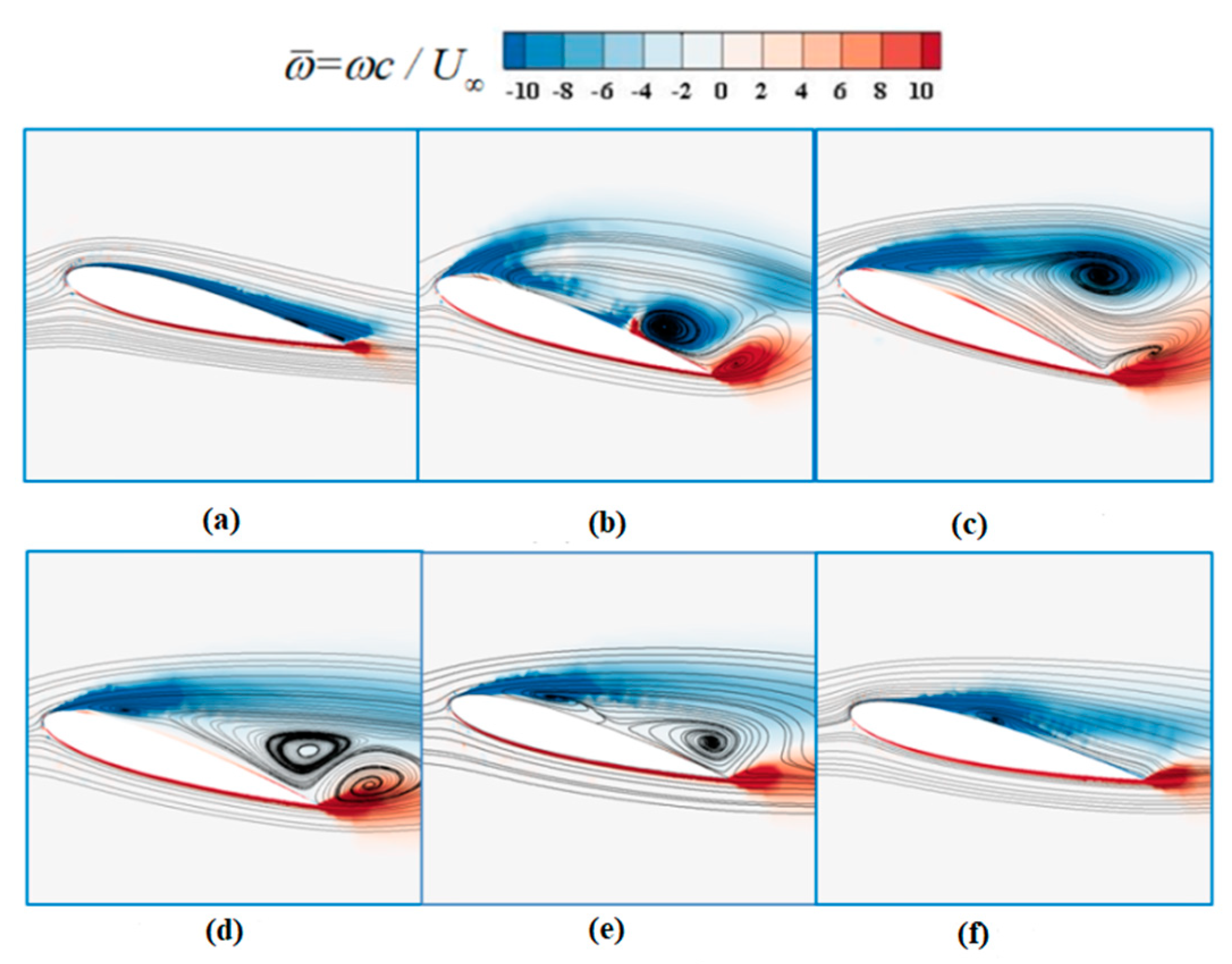
4.1. Flow Character of the Baseline Airfoil
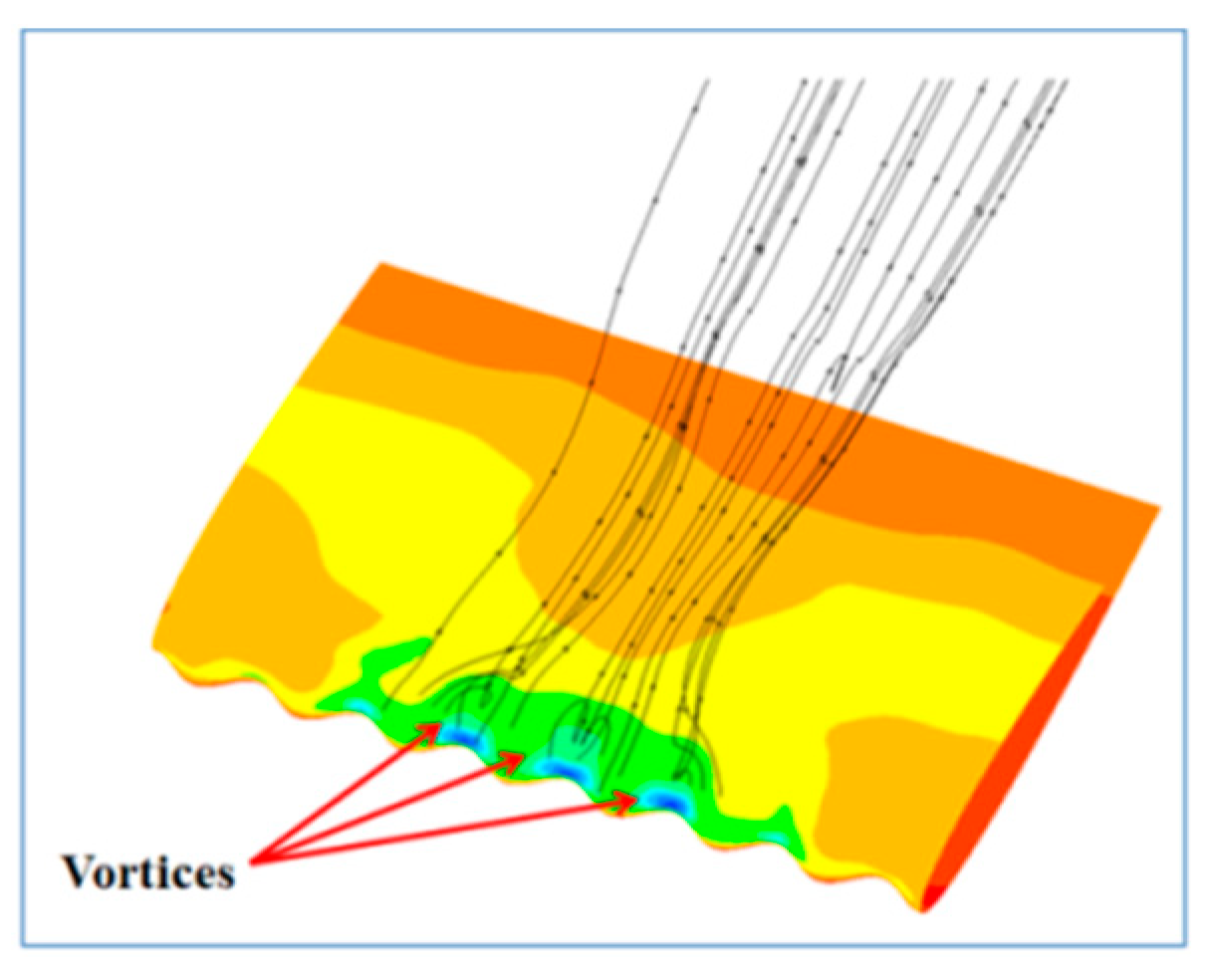
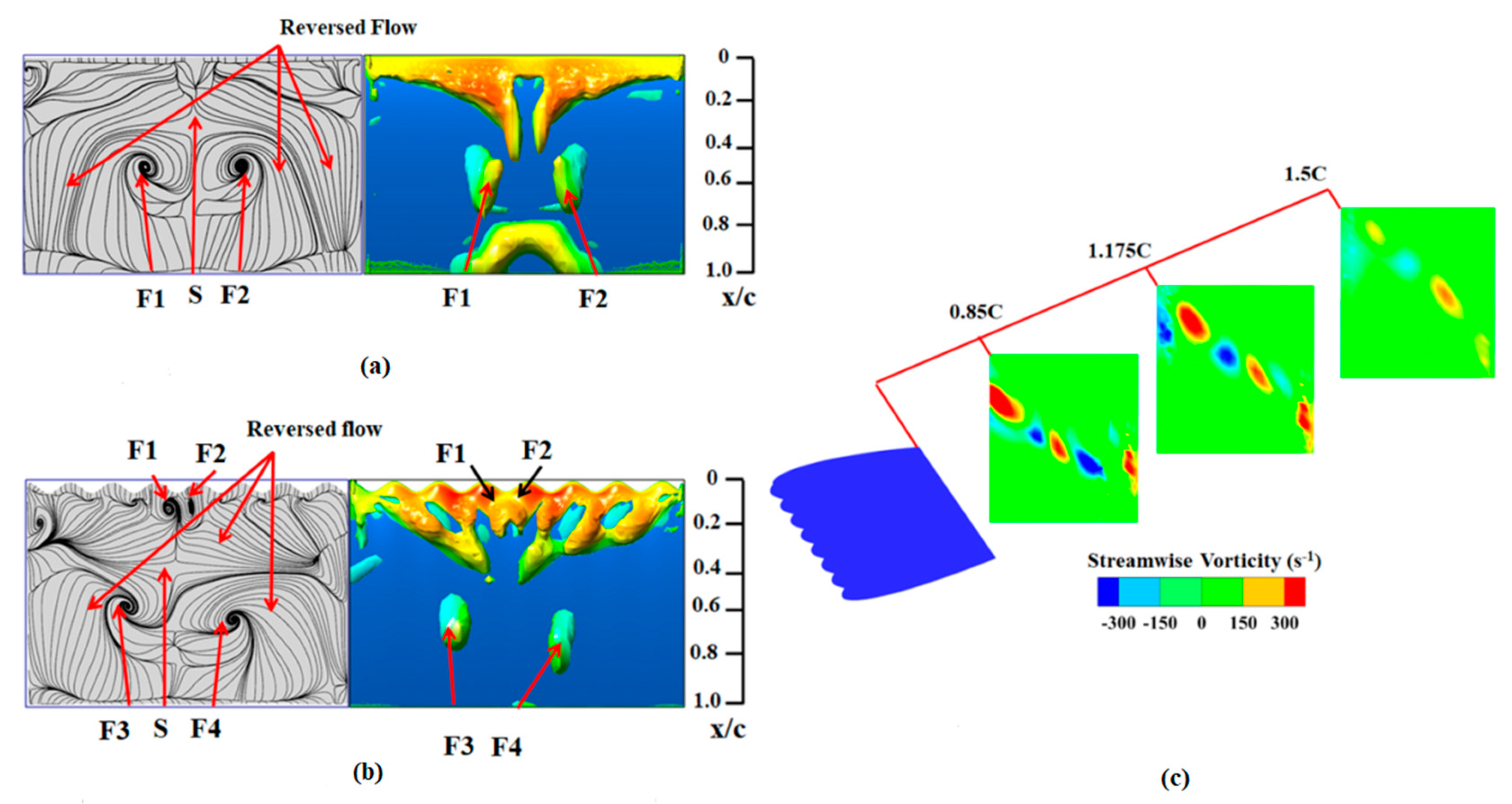
4.2. Formation of Streamwise Vorticity
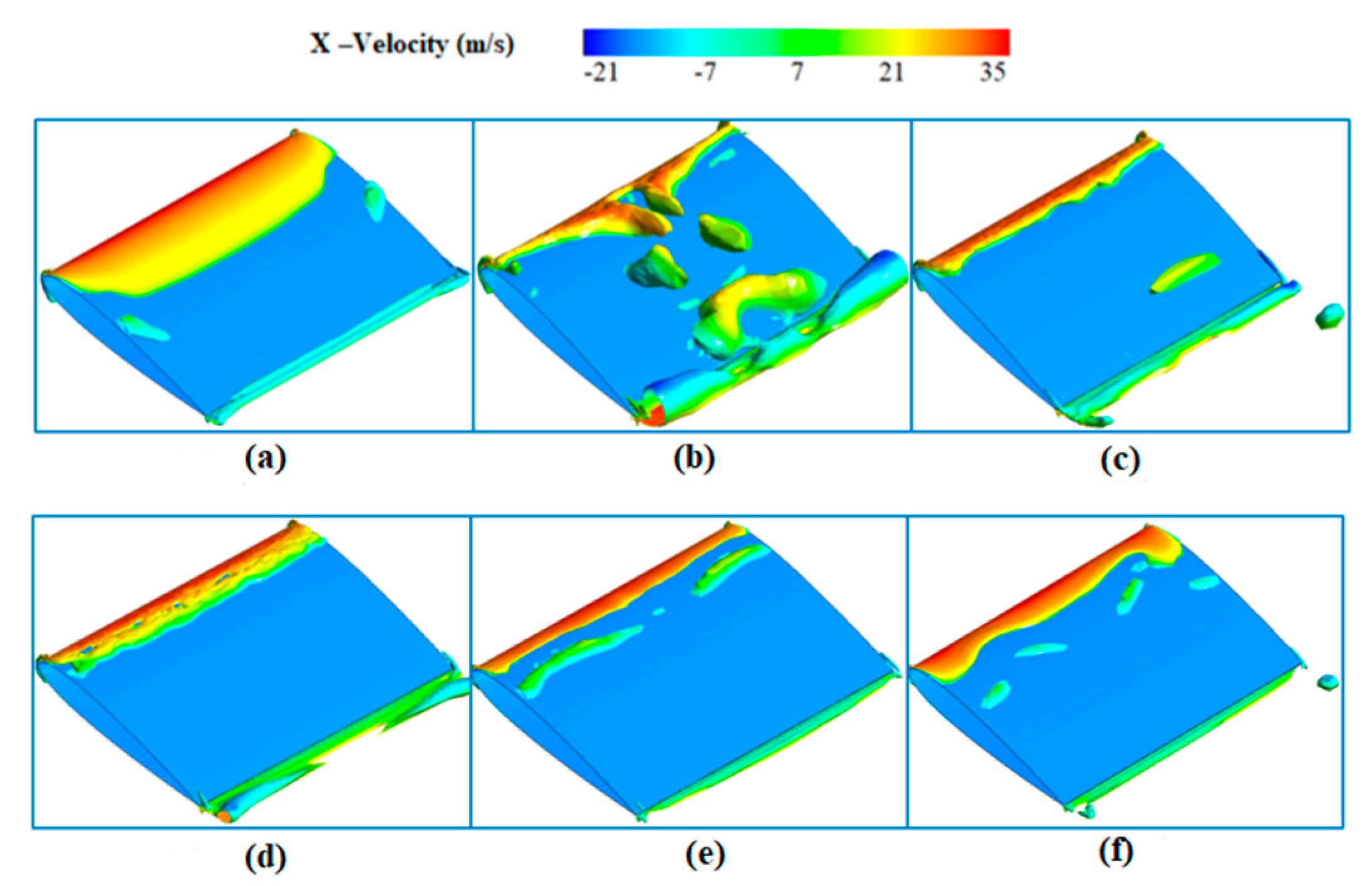
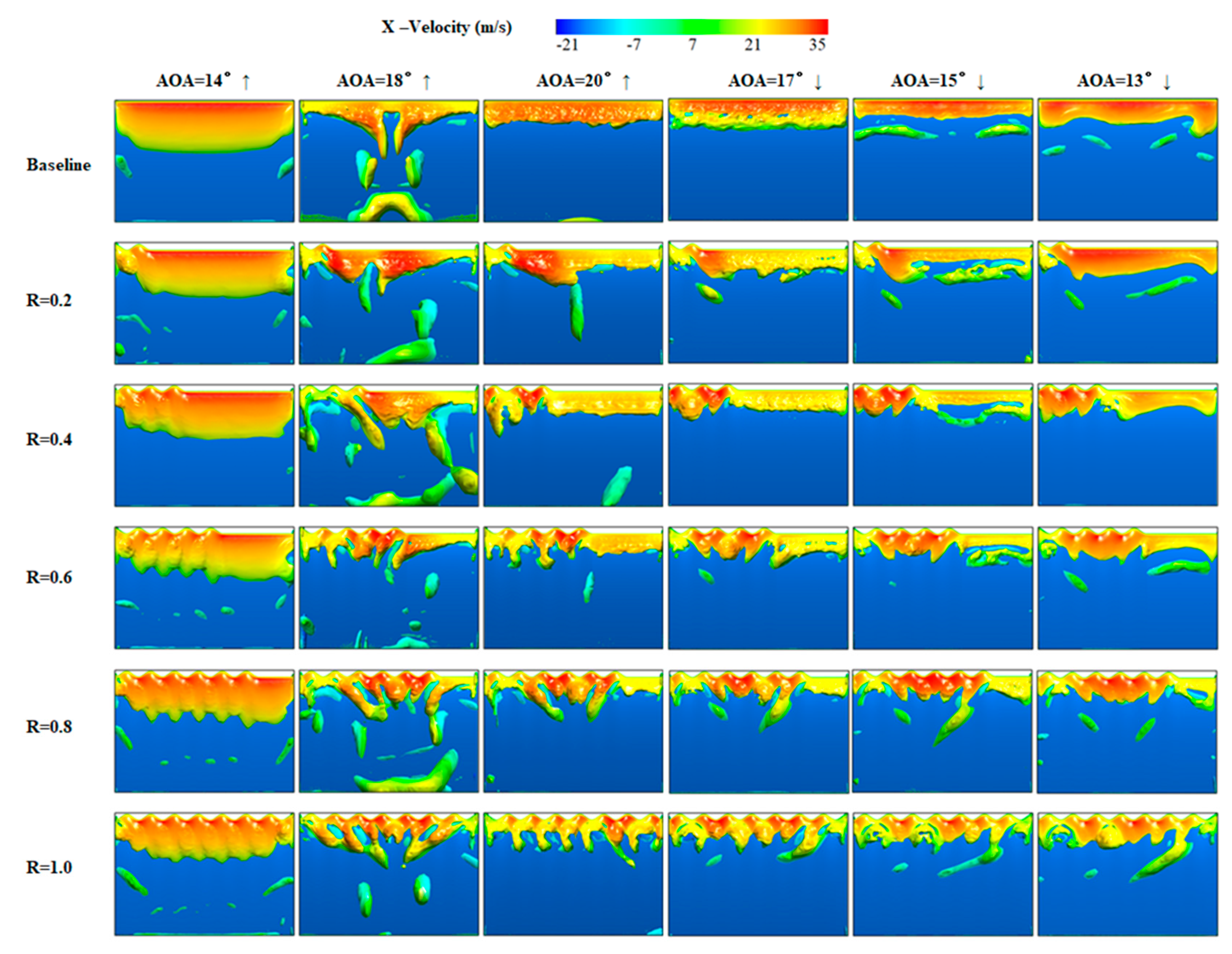
4.3. Iso-Surface of the Vorticity
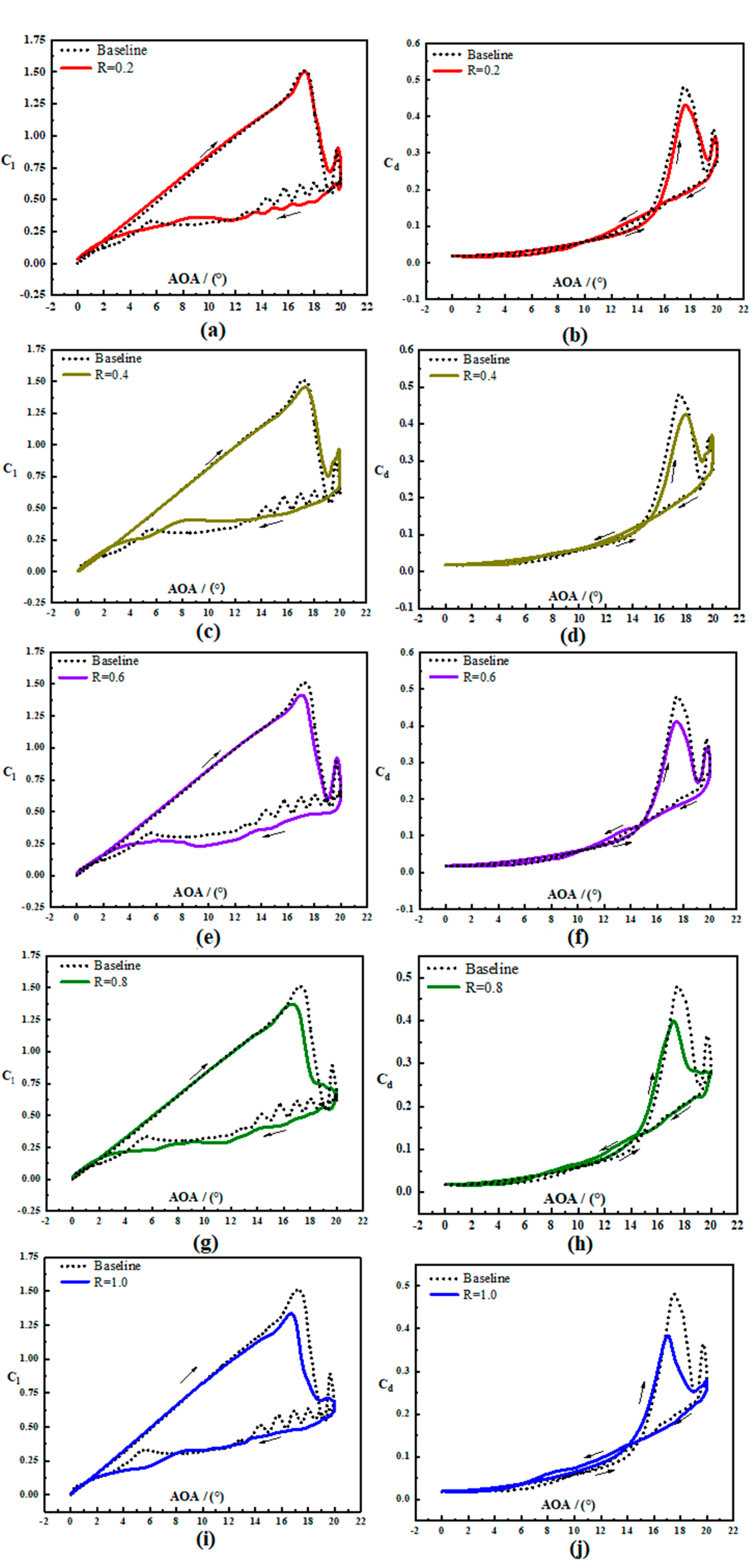
4.4. Lift and Drag Coefficients of Different Airfoils
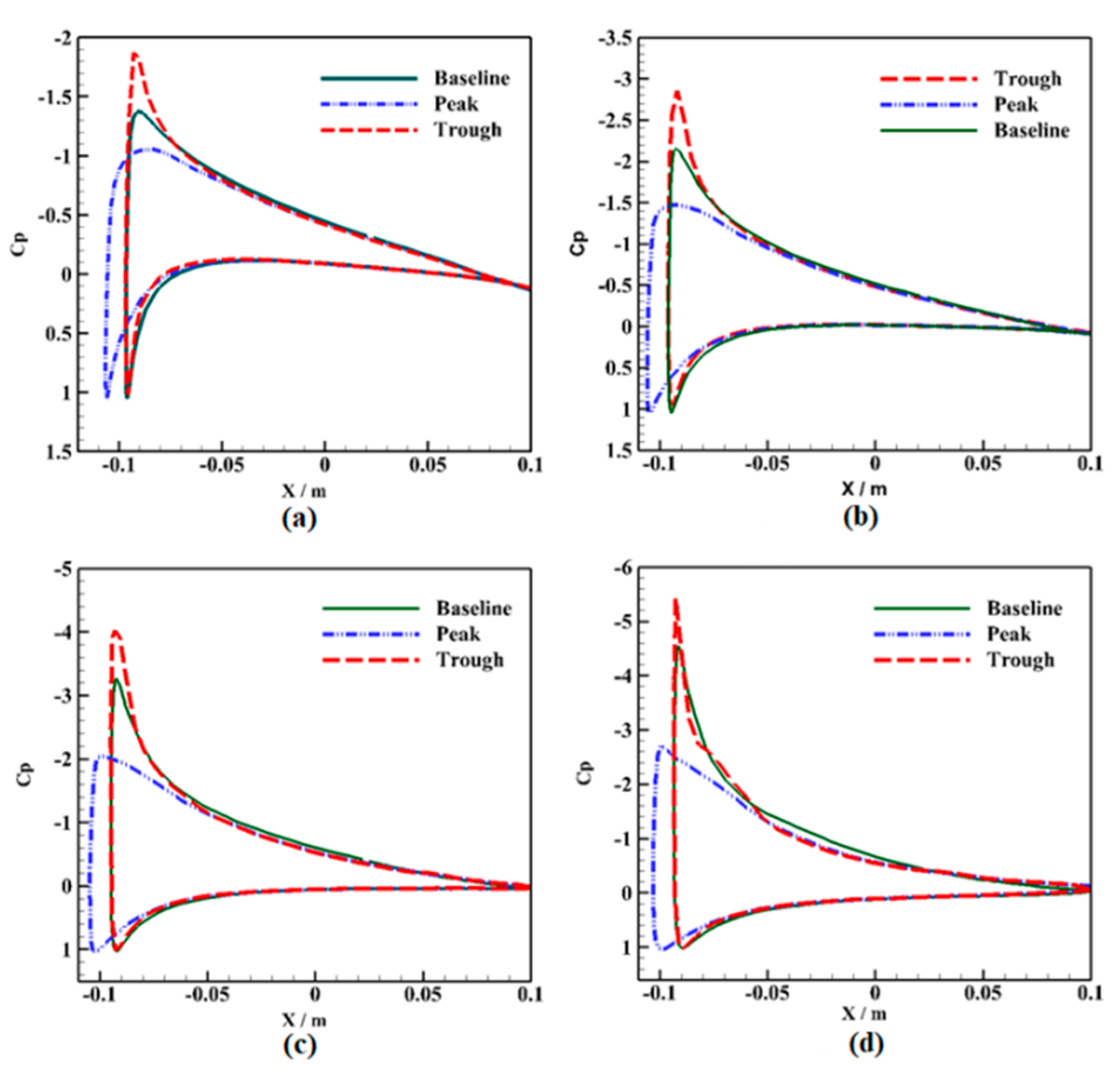
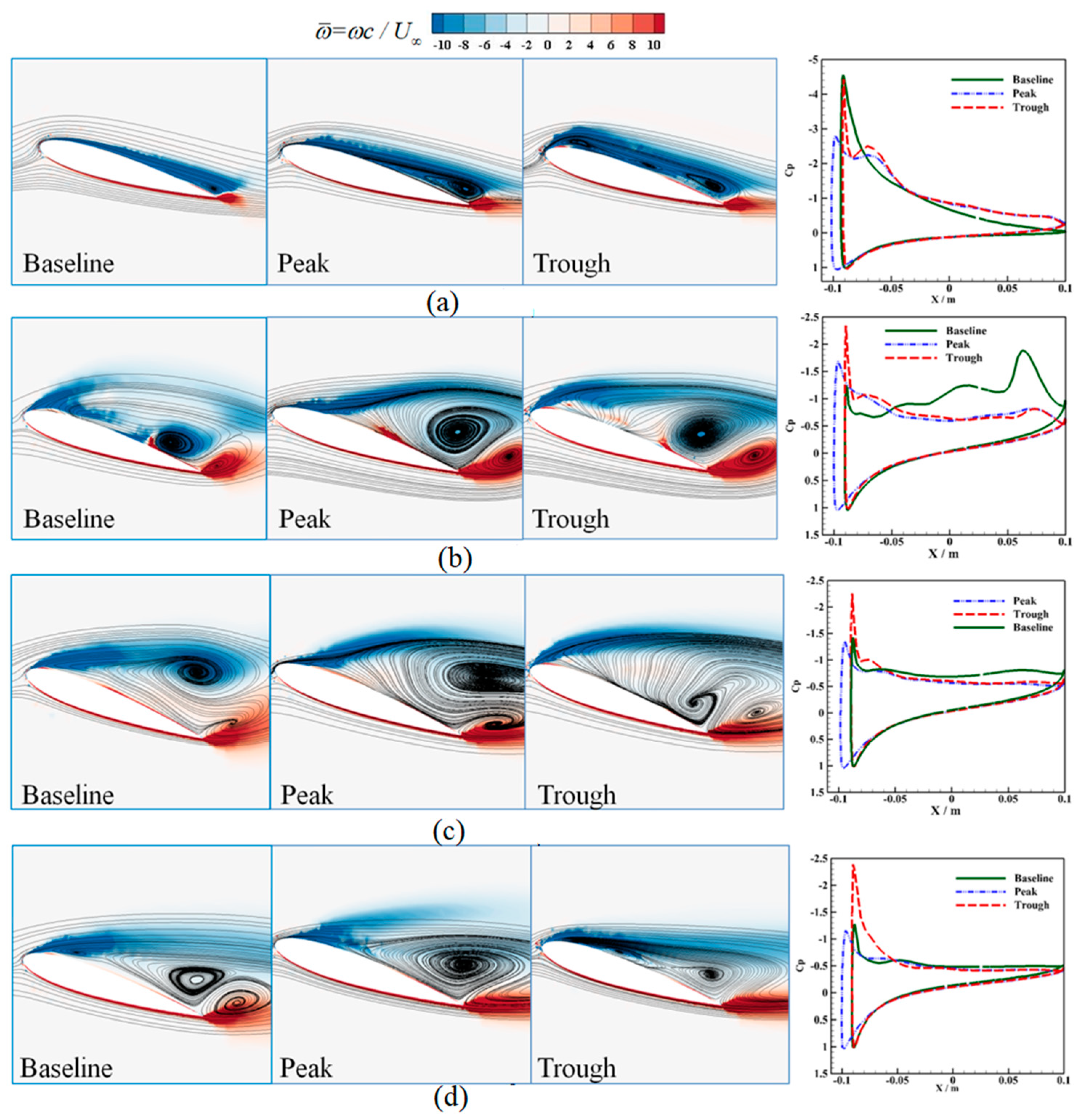
4.5. Dynamic Stall Control Mechanism of the Wavy Leading Edge
5. Conclusions
- (1)
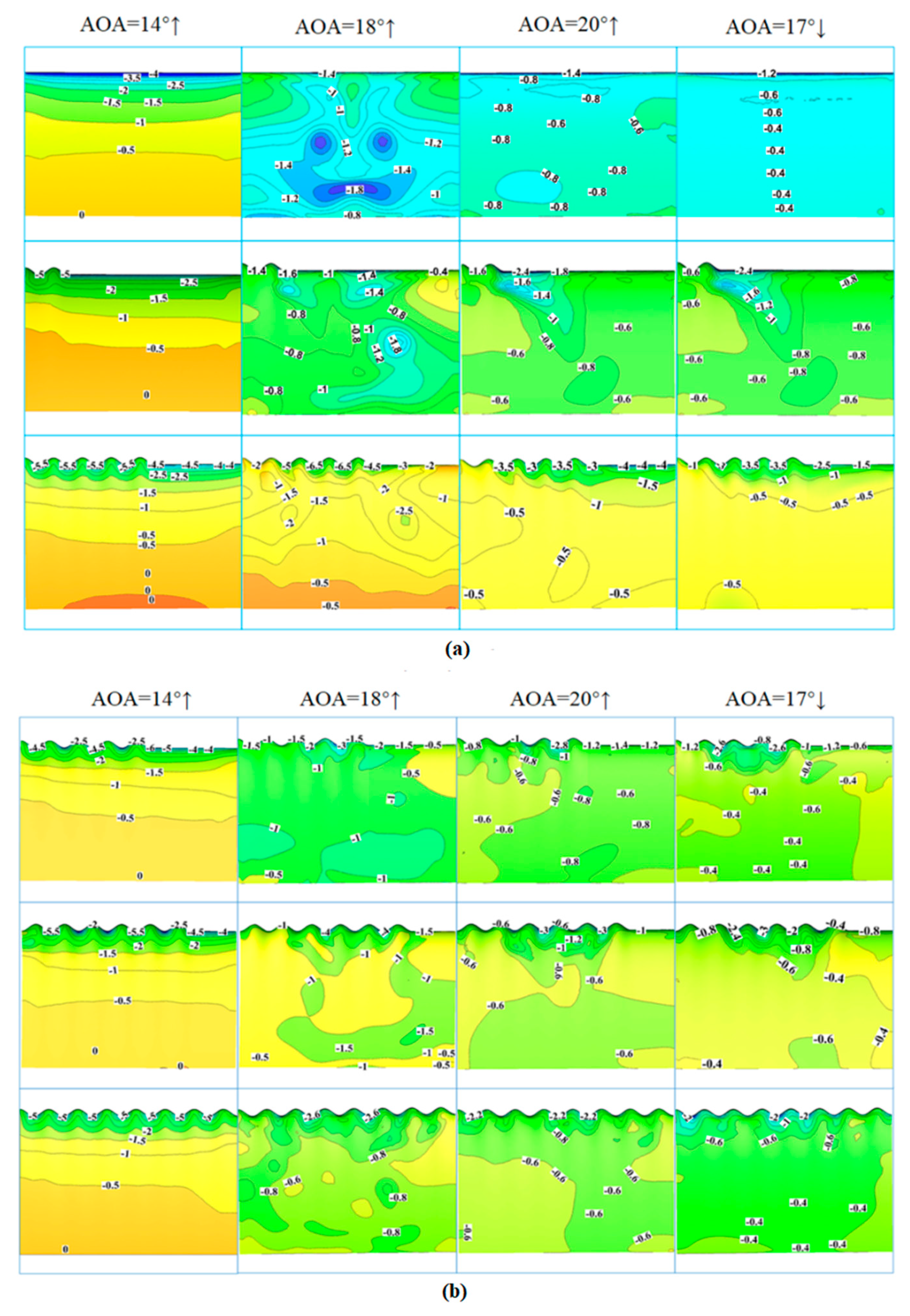
- As revealed by numerical simulations, a skew-induced mechanism can explain the generation of streamwise vorticity. From another standpoint, the spanwise vorticity rippled along the span of the airfoil caused by the tubercle leading edge, which leads to the generation of streamwise vorticity.
- (2)
- The greater adverse pressure gradient of the trough section at the wavy leading edge promotes advanced separation. The flow on the surface of the crest weakens the effect of the separating vortex on the trough and restricts its spanwise propagation. Simultaneously, the wavy leading edge suppresses dynamic stall and prevents a delay in separation.
- (3)
- The application of a wavy leading edge significantly reduces the peak drag coefficient. The peak lift coefficient is also reduced but to a much smaller degree than the peak drag coefficient. For example, the peak drag coefficient of a bionic airfoil with R = 0.8 is reduced by 16.67% and the peak lift coefficient is reduced by 9.27%.
- (4)
- It has been demonstrated that the dynamic hysteresis effect is gradually improved as the waviness ratio increases. Thus, the area of the hysteresis loop is the smallest for the bionic airfoil with R = 1.0.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| AOA | angle of attack (°) |
| AR | aspect ratio |
| a | wavy amplitude (m) |
| C | chord length of airfoil (m) |
| Cd | drag coefficient |
| Cl | lift coefficient |
| Cp | pressure coefficient |
| Cl / Cd | ratio of the lift coefficient to the drag coefficient |
| C(z) | local chord length of the airfoil (m) |
| Dω+ | positive part of the cross-diffusion term |
| f | frequency (Hz) |
| Q | Q-criteria |
| R | waviness ratio |
| Re | Reynolds number |
| S | span of airfoil (m) |
| SW | span of waviness (m) |
| Sij | average velocity strain-rate tensor |
| U∞ | Free-flow velocity (m/s) |
| Y+ | The normalized thickness of first layer grids perpendicular to the airfoil surface |
| αamp | amplitude of oscillation (°) |
| αmean | mean angle of attack (°) |
| λ | wavelength (m) |
References
- Niu, J.P.; Lei, J.M.; Lu, T.Y. Numerical research on the effect of variable droop leading-edge on oscillating NACA0012 airfoil dynamic Stall. Aerosp. Sci. Technol. 2018, 72, 476–485. [Google Scholar] [CrossRef]
- Karbasian, H.R.; Moshizi, S.A.; Maghrebi, M.J. Dynamic stall analysis of S809 pitching airfoil in unsteady free stream velocity. J. Mech. 2016, 32, 227–235. [Google Scholar] [CrossRef] [Green Version]
- Corke, T.C.; Thomas, F.O. Dynamic stall in pitching airfoils: Aerodynamic damping and compressibility effects. Annu. Rev. Fluid Mech. 2015, 47, 479–505. [Google Scholar] [CrossRef]
- Traub, L.W.; Miller, A.; Rediniotis, O. Effect of active and passive flow control on dynamic stall vortex formation. J. Aircr. 2004, 41, 405–408. [Google Scholar] [CrossRef]
- Heine, B.; Mulleneres, K. Dynamic stall control by passive disturbance generators. AIAA J. 2013, 51, 2086–2096. [Google Scholar] [CrossRef] [Green Version]
- Han, J.; Hui, Z.; Tian, F.; Chen, G. Review on bio-inspired flight systems and bionic aerodynamics. Chin. J. Aeronaut. 2020, 34, 170–186. [Google Scholar] [CrossRef]
- Wenfu, X.; Erzhen, P.; Juntao, L.; Yihong, L.; Han, Y. Flight control of a large-scale flapping-wing flying robotic bird: System development and flight experiment. Chin. J. Aeronaut 2021. [Google Scholar] [CrossRef]
- Huang, S.X.; Hu, Y.; Wang, Y. Research on aerodynamic performance of a novel dolphin head-shaped bionic airfoil. Energy 2021, 214, 118179. [Google Scholar] [CrossRef]
- Savkiv, V.; Mykhailyshyn, R.; Duchon, F.; Maruschak, P.; Prentkovskis, O. Substantiation of Bernoulli grippers parameters at non-contact transportation of objects with a displaced center of mass. In Proceedings of the Transport Means-Proceedings of the International Conference, Trakai, Lithuania, 3–5 October 2018; pp. 1370–1375. [Google Scholar]
- Dong, X.; Li, D.; Xiang, J.; Wang, Z. Design and experimental study of a new flapping wing rotor micro aerial vehicle. Chin. J. Aeronaut. 2020, 33, 3092–3099. [Google Scholar] [CrossRef]
- Chen, L.; Zhang, Y.; Chen, Z.; Xu, J.; Wu, J. Topology optimization inlightweight design of a 3D-printed flapping-wing micro aerialvehicle. Chin. J. Aeronaut. 2020, 33, 3206–3219. [Google Scholar] [CrossRef]
- Fish, F.E.; Battle, J.M. Hydrodynamic design of the humpback whale flipper. J. Morphol. 1995, 225, 51–60. [Google Scholar] [CrossRef]
- Miklosovic, D.S.; Murray, M.M.; Howle, L.E.; Fish, F.E. Leading-edge tubercles delay stall on humpback whale (Megaptera novaeangliae) flippers. Phys. Fluids 2004, 16, L39–L42. [Google Scholar] [CrossRef] [Green Version]
- Pérez-Torró, R.; Kim, J.W. A large-eddy simulation on a deep-stalled aerofoil with a wavy leading edge. J. Fluid Mech. 2017, 813, 23–52. [Google Scholar] [CrossRef] [Green Version]
- Serson, D.; Meneghini, J.R.; Sherwin, S.J. Direct numerical simulations of the flow around wings with spanwise waviness at a very low Reynolds number. Comput. Fluids 2017, 146, 117–124. [Google Scholar] [CrossRef] [Green Version]
- Hansen, K.L.; Kelso, R.M.; Dally, B.B. Performance variations of leading-edge tubercles for distinct airfoil profiles. AIAA J. 2011, 49, 185–194. [Google Scholar] [CrossRef]
- Yoon, H.S.; Hung, P.A.; Jung, J.H.; Kim, M.C. Effect of the wavy leading edge on hydrodynamic characteristics for flow around low aspect ratio wing. Comput. Fluids 2011, 49, 276–289. [Google Scholar] [CrossRef]
- Cai, C.; Liu, S.; Zuo, Z.; Maeda, T.; Kamada, Y.; Li, Q.A.; Sato, R. Experimental and theoretical investigations on the effect of a single leading-edge protuberance on airfoil performance. Phys. Fluids 2019, 31, 027103. [Google Scholar]
- Flores Mezarina, J.A.; Garcia Ribeiro, D.; Bravo-Mosquera, P.D.; Cerón-Muñoz, H.D. Aerodynamic effects of asymmetrical leading edge protuberances on a rectangular wing. In Proceedings of the 25th ABCM International Congress of Mechanical Engineering, Uberlândia, MG, Brazil, 20–25 October 2019. [Google Scholar]
- Kant, R.; Bhattacharyya, A. A bio-inspired twin-protuberance hydrofoil design. Ocean Eng. 2020, 218, 108209. [Google Scholar] [CrossRef]
- Fish, F.E.; Lauder, G.V. Passive and active flow control by swimming fishes and mammals. Annu. Rev. Fluid Mech. 2006, 38, 193–224. [Google Scholar] [CrossRef] [Green Version]
- Rohmawati, I.; Arai, H.; Nakashima, T.; Mutsuda, H.; Doi, Y. Effect of wavy leading edge on pitching rectangular wing. J. Aero Aqua Bio-Mech. 2020, 9, 1–7. [Google Scholar] [CrossRef] [Green Version]
- Cai, C.; Zuo, Z.G.; Liu, S.H.; Wu, Y.L.; Wang, F.B. Numerical evaluations of the effect of leading-edge protuberances on the static and dynamic stall characteristics of an airfoil. IOP Conf. Ser. Mater. Sci. Eng. 2013, 52, 052006. [Google Scholar] [CrossRef] [Green Version]
- Hrynuk, T.J.; Bohl, D.G. The effects of leading-edge tubercles on dynamic stall. J. Fluid Mech. 2020, 893, 1–29. [Google Scholar] [CrossRef]
- Aftab, S.M.A.; Razak, N.A.; Mohd Rafie, A.S. Mimicking the humpback whale: An aerodynamic perspective. Prog. Aerosp. Sci. 2016, 38, 48–69. [Google Scholar] [CrossRef]
- Choudhry, A.; Leknys, R.; Arjomandi, M.; Kelso, R. An insight into the dynamic stall lift characteristics. Exp. Therm. Fluid Sci. 2014, 58, 188–208. [Google Scholar] [CrossRef]
- Anders, J.B. Biomimetic Flow Control. CR Mec. 2000, 340, 1–2. [Google Scholar]
- Rival, D.; Hass, G.; Tropea, C. Recovery of energy from leading-and trailing-edge vortices in tandem-airfoil Configurations. J. Aircr. 2011, 48, 203–211. [Google Scholar] [CrossRef] [Green Version]
- Lee, T.; Gerontakos, P. Investigation of flow over an oscillating airfoil. J. Fluid Mech. 2004, 512, 313–341. [Google Scholar] [CrossRef]
- Wang, S.; Ingham, D.B.; Ma, L.; Pourkashanian, M.; Tao, Z. Turbulence modeling of deep dynamic stall at relatively low Reynolds number. J. Fluid Struct. 2012, 33, 191–209. [Google Scholar] [CrossRef]
- Karbasian, H.R.; Kim, K.C. Numerical investigations on flow structure and behavior of vortices in the dynamic stall of an oscillating pitching hydrofoil. Ocean Eng. 2016, 127, 200–211. [Google Scholar] [CrossRef]
- Kim, Y.; Xie, Z.T. Modelling the effect of freestream turbulence on dynamic stall of wind turbine blades. Comput. Fluids 2016, 129, 53–66. [Google Scholar] [CrossRef] [Green Version]
- Singhal, A.; Castañeda, D.; Webb, N.; Samimy, M. Control of dynamic stall over a NACA0015 airfoil using plasma actuators. AIAA J. 2018, 56, 78–89. [Google Scholar] [CrossRef]
- Yu, H.C.; Zheng, J.G. Numerical investigation of control of dynamic stall over a NACA0015 airfoil using dielectric barrier discharge plasma actuators. Phys. Fluids 2020, 32, 035103. [Google Scholar]
- Rostamzadeh, N.; Hansen, K.L.; Kelso, R.M.; Dally, B.B. The formation mechanism and impact of streamwise vortices on NACA 0021 airfoil’s performance with undulating leading edge modification. Phys. Fluids 2014, 26, 51–60. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values | Values |
|---|---|---|
| Airfoil | NACA0015 | NACA0012 |
| Reynolds number (Re) | 3.0 × 105 | 1.35 × 105 |
| Amplitude of oscillation (αamp) | 10° | 15° |
| Oscillation frequency (f) | 1.7507 | 1.162 |
| Mean angle of attack (αmean) | 10° | 10° |
| Free-flow velocity (U∞) | 22 m/s | 19.72 m/s |
| Chord length of airfoil (C) | 0.2 m | 0.1 m |
| Airfoil | Clmax | Cdmax | ΔClmax | ΔCdmax |
|---|---|---|---|---|
| Baseline | 1.51 | 0.48 | ||
| R = 0.2 | 1.50 | 0.43 | −0.67% | −10.42% |
| R = 0.4 | 1.49 | 0.42 | −1.32% | −12.5% |
| R = 0.6 | 1.41 | 0.41 | −6.62% | −14.58% |
| R = 0.8 | 1.37 | 0.40 | −9.27% | −16.67% |
| R = 1.0 | 1.34 | 0.39 | −11.26% | −18.75% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, L.; Liu, X. Dynamic Stall Characteristics of the Bionic Airfoil with Different Waviness Ratios. Appl. Sci. 2021, 11, 9943. https://doi.org/10.3390/app11219943
Wu L, Liu X. Dynamic Stall Characteristics of the Bionic Airfoil with Different Waviness Ratios. Applied Sciences. 2021; 11(21):9943. https://doi.org/10.3390/app11219943
Chicago/Turabian StyleWu, Liming, and Xiaomin Liu. 2021. "Dynamic Stall Characteristics of the Bionic Airfoil with Different Waviness Ratios" Applied Sciences 11, no. 21: 9943. https://doi.org/10.3390/app11219943