Featured Application
A potential application of the work relates to automated or semi-automated systems for the design and production of chainmail with preset or personalised properties for medical applications.
Abstract
The problem of computerising the design and development of 3D-printed chainmail with programmed directional functions provides a basis for further research, including the automation of medical devices. The scope of the present research was focused on computational optimisation of the selection of materials and shapes for 3D printing, including the design of medical devices, which constitutes a significant scientific, technical, and clinical problem. The aim of this article was to solve the scientific problem of automated or semi-automated efficient and practical design of 3D-printed chainmail with programmed directional functions (variable stiffness/elasticity depending on the direction). We demonstrate for the first time that 3D-printed particles can be arranged into single-layer chainmail with a tunable one- or two-directional bending modulus for use in a medical hand exoskeleton. In the present work, we accomplished this in two ways: based on traditional programming and based on machine learning. This paper presents the novel results of our research, including 3D printouts, providing routes toward the wider implementation of adaptive chainmails. Our research resulted in an automated or semi-automated efficient and practical 3D printed chainmail design with programmed directional functions for a wrist exoskeleton with variable stiffness/flexibility, depending on the direction. We also compared two methodologies of planning and construction: the use of traditional software and machine-learning-based software, with the latter being more efficient for more complex chainmail designs.
1. Introduction
Recently, artificial intelligence (AI), machine learning (ML), and data science have become widespread and are increasingly being applied in 3D-printing and reverse engineering research, including biomedical applications. The scope of the research was focused on computational optimisation of the selection of materials and shapes for 3D printing, including the design of medical devices, which constitutes a significant scientific, technical, and clinical problem. Its efficient solution may bring significant social and economic benefits by increasing the effectiveness of the rehabilitation equipment used by patients in the process of motor rehabilitation. Some of these problems can be solved by 3D printing. The problem of computerisation of the development of 3D-printed chainmail designs with programmed directional functions provides a basis for further research, including the automation of medical devices under the Industry 4.0 paradigm [1,2,3]. Technological and social changes in the 21st century have led to greater computerisation, automation, and robotisation of industry. At the same time, human intervention in the production process is being reduced. This has led to a revolution in industry, the so-called fourth industrial revolution (IR 4.0, Industry 4.0). IR 4.0 relies heavily on the Internet of Things (IoT), wireless sensor networks (WSN), and the use of artificial intelligence and computational models, including digital twins. This enables not only technical control throughout the manufacturing stage, but also prediction and lifecycle assessment (LCA) of various products [1,2,3,4,5].
The principle of chainmail is relatively simple: the shape, interconnections, and geometric number of particles at the microscale determine the resulting properties (e.g., mechanical) at the macroscale, so adjusting the shape, interconnection, and material of the particles affects the trade-off between weight and adaptability of the bending modulus. The complex shapes of the components, the connections between them, and the resulting complexity of chainmail have been a major obstacle in the design of entire chainmail systems with desirable characteristics. However, the rapid development of 3D design and printing technologies with higher performance, improved material properties (including related to contact with skin and body fluids), and the use of ML techniques in design has now begun to come to fruition [4,5]. These technologies offer a complement to traditional biosystem design [6]. The key problem is to acquire and maximise the use of available data and to find novel solutions that perform better than the existing ones (with enriched properties, often meeting a set of contradictory requirements). AI and ML methods are applied at every stage of computer-aided design, and their combination results in a high success rate of the therapeutic process and represents a step forward towards prediction of clinical outcomes using integrated AI/ML models [7,8,9].
In our applications, ML models make it possible to identify patterns in complex data (including biomedical data used for exoskeleton design), support design and optimisation at every stage of manufacturing, and provide support in finding nonobvious engineering solutions with fewer design iterations, shorter duration, and lower cost. This is particularly important for exoskeletons, where varying size, movement patterns, type, and deficit levels require a personalised approach [10].
One of the important problems to be solved in assistive technologies and rehabilitation robotics is the need to provide materials with controlled bending force and direction. More and more methods are being used to address the challenge of preprogrammed elastic deformation mentioned above, so as to avoid complicated elasticity calculations [11]. One way to solve this problem is cellular neural networks, in which local chainmail position corrections are captured as local cell connections. In this way, the dynamic deformation behaviour (not only of 3D-printed fabrics, but also of neural structures or soft tissues) is directly transformed into the dynamic behaviour of the cellular neural network [12,13,14]. This approach is able to efficiently model both typical and atypical nonlinear mechanical behaviours. It gives the designers a lot of freedom, as it is enough to program the boundary parameters of the chainmail structure and the remaining issues are solved automatically in some common cases. In other cases, it is necessary to tune the solution parameters to the requirements/expectations, which are usually described by clinical parameters [15,16].
Chainmails are included in the four-dimensional (4D) printing family of materials that has been developed since 2013. This approach extends the previous complex geometries of manufactured 3D objects by giving classical static structures dynamic properties that change over time and ensuring that these structures adapt to, for example, the changing shape of the hand in the therapeutic process [17].
Our 3D-printed chainmail makes it possible to obtain materials and ready-made elements (here an exoskeleton on a hand) with preprogrammed properties related to:
- The size and shape of the elements and the resulting properties;
- The material used (PLA, ABS, and others) and the resulting properties;
- Bending: in all directions, in only one direction, or in selected directions, with a programmed maximum bending angle;
- Tensile properties in both directions (e.g., kinesiotex tapes with properties similar to human skin);
- Degree of softness;
- Other properties (durability, etc.) as needed;
- Opportunities for computerisation of design and optimisation of ownership thanks to artificial intelligence (AI) [18].
Technological and material advances in 3D printing allow for faster fabrication, greater freedom of shape selection, and programmable control of mechanical properties, providing the potential for innovative interdisciplinary engineering solutions in mechanics, automation, robotics, computer science, and biomedical engineering. An example is the availability of AI-assisted 3D design of personalised medical devices, such as in dentistry, where in-office 3D printing is booming and design individualisation is very much required. With the advent of new biocompatible 3D-printing resins, the ability to 3D print personalised devices such as orthodontic distalisers and power arms requires 3D modeling skills, but knowing the biomechanical aspects in relation to the different strengths of 3D-printing materials is much more complicated for dentists. In such cases, support with shape optimisation would be extremely useful [19,20]. Programmability here can refer to a combination of programmable mechanical design, programmable materials, programmable fabrication, and programmable operation of the finished device. Research work in these areas can be accomplished through hierarchical programming, from modelling and fabrication to the operation of the finished device [21,22]. The dynamic displacement of the material structure can be controlled (and to a much greater extent than before) by changing the geometric and material parameters through a combination of techniques for selecting the shapes of individual elements, the way they are connected, and the properties of composite structures [23]. This makes it possible to create stretchable electronics, deformable devices, self-assembled fabrication, etc. [24]. Both the geometry and features of these materials can be printed; hence, it is referred to as 4D printing. Traditionally, one of the greatest difficulties with 3D printing of assistive technology has been the comfort and flexibility of the products, with their low thickness and low weight. Currently proposed 3D-printed solutions solve this group of problems (e.g., through an adaptively selected filling factor), but this is not enough to control the flexibility of the product. Another advantage is the fact that an end product, even with a complex shape, can be printed in one piece (one production run), which ensures, if required, high uniformity and repeatability of the preprogrammed properties over the entire surface. The new material can also be sewn, braided, glued, and welded. Materials with various additives can provide antibacterial, magnetic, or optical properties, and can also be more biodegradable, e.g., made of algae, coffee grounds, or wood.
Despite the growing and expanding popularity of 3D-printed chainmails, there is a lack of reviews that present current trends in chainmail modelling methods, techniques, and strategies in the context of predicting their shapes, connections, and properties (including personalised profile modelling) in rehabilitation devices. To date, research on applications of artificial intelligence in exoskeletons (wearable robots) has focused mainly on control systems [25,26,27], diagnosis support, and therapy monitoring [28], and much less on optimisation of the shapes of the elements, materials used, or their properties [29,30]. Meanwhile, a 3D-printed, personalised hand exoskeleton (Figure 1) provides the possibility to solve a number of problems as early as at the stage of construction and adjustment of their properties (shapes, materials), while they may be difficult or impossible to solve at later stages or during the clinical use of the exoskeleton. Undoubtedly, further research is needed regarding the deeper incorporation of sustainability and digital twin paradigms in Industry 4.0 [31,32]. These areas may also affect the material and management issues of the exoskeleton, as technical control should be incorporated in all stages of the exoskeleton life cycle. The requirements of the MDR (Medical Device Regulation, 2017/745/EU) directive [33] and the ISO 13485 standard [34] should also be taken into account to ensure better life cycle control of devices such as prostheses and orthoses.
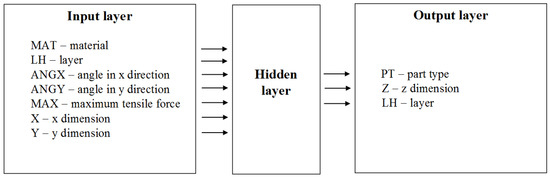
Figure 1.
ANN structure: inputs and outputs.
Recent developments in 3D printing of chainmails for biomedical purposes were discussed in [35,36]. Płoszajski et al. described chainmails fabricated by selective laser sintering (SLS) 3D printing and subjected to magnetic functionalisation to create a lightweight, 4D-printed activation fabric. Interestingly, postprocessing involved immersing the porous prints in ferrofluid and drying them at high temperature. Magnetically activating fabrics produced in this way may have applications in the production of thin, lightweight, and comfortable wearable assistive devices [35]. Wang et al. proposed chainmail with a bending strength 25 times stiffer under low external pressure (about 93 kilopascals) than in the relaxed position, showing promise as a starting material for lightweight and adaptive fabrics for use in exoskeletons, haptic systems, and reconfigurable medical supports [36]. The shapes and/or properties of 4D-printed objects can change in a controlled manner under the influence of heat (body, ambient), illumination, humidity, and pH level, but also the flow of an electric current and interaction with a magnetic field [37,38]. The combined use of traditional and 4D-printed materials to fabricate biomimetic structures is also possible. It is also possible to combine thin-film composites, kirigami patterns, and auxetic structures to produce integrated piezoelectric systems for wearable devices for monitoring and early detection [39].
The aim of this paper was to solve a scientific problem concerning the automated or semi-automated efficient and practical design of a 3D-printed chainmail with programmed directional functions for a wrist exoskeleton. These directional functions imply variable stiffness/flexibility depending on the direction. Such a research objective fits into the Industry 4.0 paradigm. We did this in two ways: with traditional and machine-learning-based software, using traditional artificial neural networks (ANNs).
2. Materials and Methods
2.1. Materials
Chainmail braiding technology derives from an ancient tradition, and to date several thousand types of weaves have been developed, mainly for military and decorative purposes. However, 3D-printing technology has given this technology a new lease on life, allowing it to go beyond the current limits of the braiding method and the properties of metal materials.
In each case, whenever possible, we tried to use a flat chainmail (what is called in art the European weave), which is more compact than a spatial weave (what is called in art the Japanese weave).
We printed chainmails based on our own designs on different printers, using different technologies, and with different properties (element size, directionality, and bending angle). This allowed us to examine and show in this article the whole spectrum of possible solutions within the investigated area. These different chainmail versions we used in the author’s hand exoskeleton described in other publications [40,41].
2.2. Methods
Standardised names concerning additive manufacturing technologies were used according to ISO/ASTM 529:
- 3D printer (2.3.1);
- Additive manufacturing (2.1.2);
- Material extrusion (2.2.3);
- Feedstock (2.5.2);
- Laser sintering (LS).
Two different 3D printers were used to create the chainmail-based parts of a hand exoskeleton:
- Prusa i3 MK3S3 filament printer;
- Prusa SL1S3D SLA printer.
The values of the printing process parameters in this study were selected based on the recommendations of the manufacturers of the materials and printers, previous research and scientific publications, and the experience of members of the research team [29,31,34]. A large amount of data and the lack of their full organisation in the form of databases made it impossible to analyse and use them without the use of computers. For these reasons, artificially intelligent optimisation and objectification of the parameter selection process is a very important and future-oriented area of research.
To achieve the aim of the study, we built two concurrent basic solutions to support the design of chainmail with the desired features:
- An algorithm for calculating/setting the repetitive pattern, implemented and tested in Java (Java IDE IntelliJ Idea 2019.3);
- A machine-learning-based tool using traditional artificial neural networks using Matlab R2021b with Neural Networks Toolbox (MathWorks, Natick, MA, USA).
All printing simulations were carried out in the PrusaSlicer program (version 2.4.1, Prusa Research a. s., Prague, Czech Republic).
2.3. Statistical Analysis
MS Excel (Microsoft Corporation, Redmond, WA, USA) was used for data collection due to the ease of integration of various types of data, including .csv files from the devices.
The results (project data from the 3D-printing software, material parameters, and calculation results) were subjected to statistical analysis. All data were analysed using the Statistica 13 program (StatSoft, Palo Alto, CA 94304, USA).
The normality of the data distribution was checked each time using the Shapiro–Wilk test (α = 0.05). As a result, if the values of the data distributions were close to the normal distribution, they were presented using mean values and standard deviation (SD), while if the values of the data distributions were different from the normal distribution, they were presented using the median, minimum value, maximum value, and the lower quartile (Q1) and upper quartile (Q3).
The strength of the correlation between the results was expressed using Spearman’s Rho. The significance level was set at 0.05.
2.4. Computational Methods
The main problem in automated chainmail design is twofold. The first is the lack of computational chainmail models. The second is the inaccuracy implicit in the balance between the shape and dimensions of individual chain elements and the same parameters for an entire chain consisting of many such elements. It is challenging to quickly create a relationship between the mathematical, physical, and mechanical rules due to the lack of precise mathematical models; thus, an AI-based tool may derive them from datasets, gather them together, and create a tool for computational analysis and design.
As an artificial neural network (ANN), a feed-forward neural network with a backpropagation algorithm written in the Matlab programming environment was used for the solution. Networks of this type are often used to build solutions where complete data are unknown. Many experimental ANNs were built during the construction of the network, and this article presents only the most promising. The conditions for selecting input parameters were:
- Homogeneous values;
- Normalisation of input data.
The ANN structure was generally selected on the basis of:
- The programmer’s knowledge;
- ‘Hit and miss’ trials;
- Genetic algorithm.
We also used:
- A three-layer forward neural network (Figure 2);
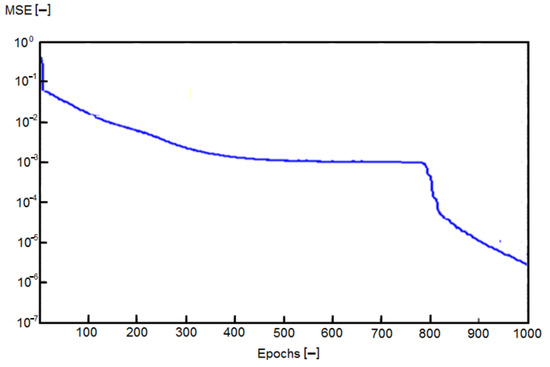 Figure 2. Values of MSE during learning.
Figure 2. Values of MSE during learning. - Back-propagation (BP) algorithm;
- Perceptron Linkage Optimisation set for minimal multilayer diagnostics focused on setting the mean squared error (MSE);
- naive initialisation techniques over more advanced solutions (e.g., LeCun initialisation).
After a retrospective analysis of the 3D-printing parameters, efforts were made to model the problem posed in this way. The ANN method as part of ML is data-dependent, so we used the following datasets:
For unidirectionally bent chainmail shapes, the proper directional angle should be set to 0. A training dataset was used to fit the parameters of the model, and then a validation dataset was used to assess the model fit to the training dataset. Lastly, a test dataset was used to assess the final model fit.
We began by creating datasets with more input and output parameters (60 parameters taken from the printer and slicer software), but this increased the computational effort unnecessarily without significantly affecting the accuracy of the final result.
Each layer of the network contained neurons with the same activation functions (Table 1): sigmoidal type–hyperbolic tangents as a very flexible nonlinear function.

Table 1.
The best MLP network models (the best one is marked in bold).
The number of neurons in the hidden layer was adjusted to the number of inputs (n) and inputs (m). The number of neurons in the hidden layer influences, for example, the possibility of generalising the network. The number of epochs ranged from 500 to 1000 (Figure 2).
The proposed method of optimising the number of neurons in the hidden layer (from 2n-1 to 3n) is a step towards unifying the problem of selecting ANN parameters for 3D printing under Industry 4.0 using the AI method (Figure 3).
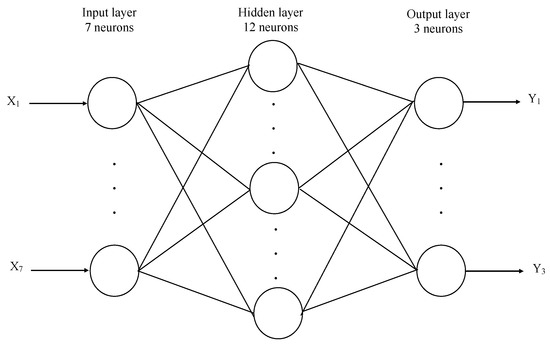
Figure 3.
Structure of the optimal ANN.
3. Results
The material consisted of many single elements. A single element consisted of (Figure 4):
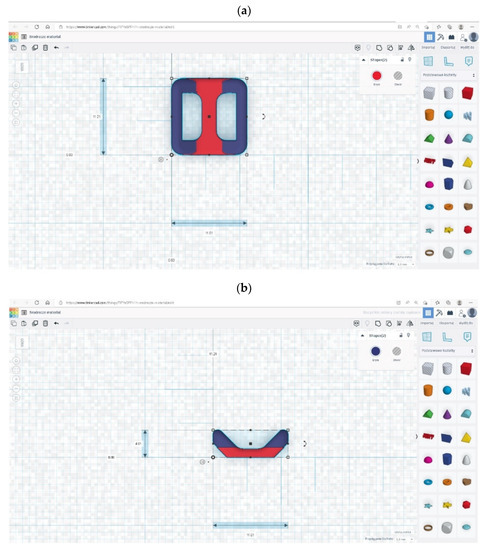
Figure 4.
Construction of a single element: (a) top view, (b) side view.
- Base (marked in red)—an element that is placed on the table during 3D printing. This is a necessary part due to the specificity of 3D printing (for printers that do not make supports) without which the material cannot be made;
- Dyelet (marked in blue)—the part that connects the individual elements. This is an example of a 3D material, which was used to create material for the metacarpals.
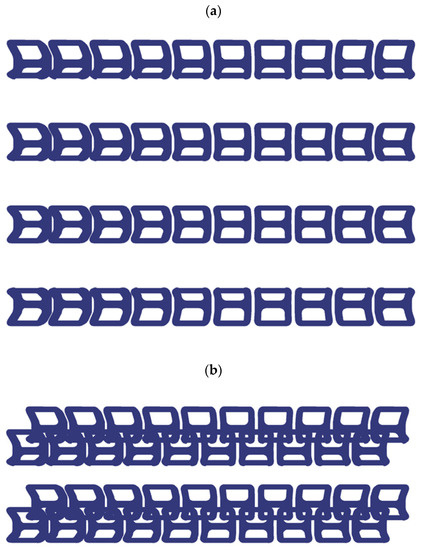
Figure 5.
Construction of the chainmail from single elements: (a) single element, (b) single elements as the chainmail.
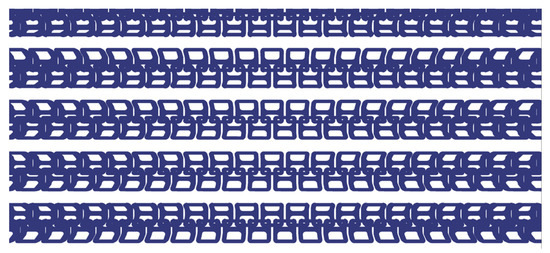
Figure 6.
Construction of the chainmail.
The first version of the algorithm that creates and sets the material is described below, presented in the form of a pseudo code (Algorithm 1):
| Algorithm 1: Algorithm that creates and sets the material of the chainmail |
| int iloscWierszy = 10; // number of lines of material |
| int numberMarches = 10; // number of meshes (elements) in the given row |
| float offset = 0; |
| float LOCATION OFFSETX = −6; # shift in the X axis float |
| LOCATION OFFSETY = 10; # Y axis shift float |
| RozstawElementow = 4.5; # multiplier of single items |
| fileZobiektem = loadOvject (“object.stl.”); # loading the model of the element |
| for (int ix = 0; ix <iloscWowsze; ix ++) |
| { |
| for (int jx = 0; jx <number of mesh; jx ++) |
| { |
| if ((jx% 2) == 0) |
| { |
| // modulo for lines that is for every other line it does. |
| shape (fileObject, (Jx + Shift)) +LinkLiftX, Elemntow * (jx + Shift) +LinkLiftY); |
| // Move every other line to fit in the previous line |
| } |
| else |
| { |
| shape (objectFile, (Elemntow * (ix + offset)) + 0, Elemntow * (jx + offset)); |
| } |
| } |
| } |
The 3D material was produced using SLA 3D printers and light-hardened resins. These resins are toxic and require specialised equipment, not only a 3D printer; you also need a washing and curing machine (if it is not a multifunctional device). Only a simulation of the printout was made due to the difficulty of printing such elements, but it was possible to achieve a layer thickness of 0.01 mm, and the distance between blocks (polygons) was also limited to 0.01 mm, compared to 0.1 mm for filament. Using a 3D filament printer (Prusa i3 MK3S), it was possible to create a material with an accuracy of 0.0001 m (0.1 mm).
Our goal now is to create an even more accurate 3D material that is more exact and has the same properties as the material from a filament printer (Figure 7 and Figure 8).

Figure 7.
Material models in three sizes (from the biggest) original → 50% version → 5% version.
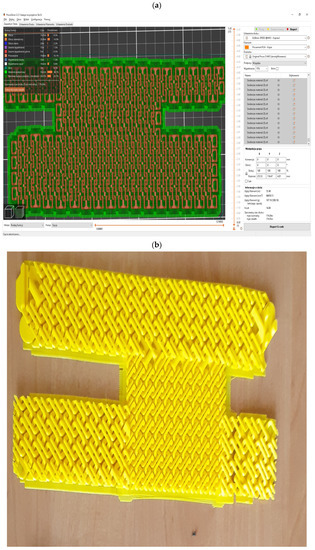
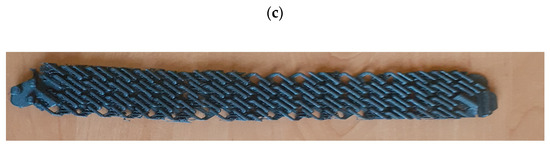
Figure 8.
Printouts of the chainmail: (a) project, (b,c) real chainmail.
The simulated material was the same as the original one (at 1:1 scale). Generally speaking, an error occurred if the stand (bending layer) under the bounding blocks did not print, which caused the material to no longer fulfill its function. Theoretically, this could be corrected by forcing a specific thickness of the base, but then another problem arose.
The simulator takes into account the ideal printing conditions: room temperature, stable placement of the 3D printer, and perfect calibration. The last condition is the most difficult because it should be done every time the filament type is changed, e.g., from PLA to FLEX (some manuals recommend calibration every time there is a change between filaments from different manufacturers). The same is true for a laser printer, whereby laser printers use a hardening light feed (UV radiation, as a rule).
The 25% version was scaled up and the distance between the waiting boundary blocks was up to 0.000025 m (0.025 mm).
The material was simulated to be the same as the original one. Unfortunately, it turned out to be a complete failure because it printed as a solid material (for printing parameters, see Table 2 and Table 3).
Table 2.
Selected 3D printer parameters.
Table 3.
Selected material parameters used.
PLA melts at a relatively low temperature of about 175 °C; in addition, unlike thermoset materials, PLA can be heated above its melting point repeatedly. It is a tough and cookable material, proven for 50 micron layer heights. The disadvantages of PLA are low heat resistance—PLA parts begin to lose mechanical strength at temperatures above 60 °C; it also has low UV resistance. PLA is soluble in chloroform or hot benzene, so regular glue can be used to join many parts. PLA is food-safe, but it is not recommended to continuously drink or eat from 3D prints with PLA (over time, bacteria can accumulate in small cracks on the surface of the print, but this can be prevented by applying a food safe coating. PLA postprocessing requires wet sanding.
In the simulations on the SLA 3D printer (Prusa SL1S printer), the same model was used in the three variants (not including the original one). The four variants (including the original) were designated PLA100 (the original, at 100% size), PLA50 (50% of the original’s size, with a distance between blocks of 0.00005 m (0.05 mm), PLA25, and PLA10. The 50% variant had distances between blocks of 0.00005 m (0.05 mm), the 25% variant had distances between blocks of 0.000025 m (0.025 mm), and the 10% variant had distances between blocks of 0.000001 m (0.01 mm).
A different type of support (spreader) had to be used. A support plate (shim) mounted only on the printing table was selected. The 50% and 25% variants were printed correctly. Only the 10% model failed due to the fact that the supports broke through the model.
The best results for the ANN were achieved with n = 7, m = 3, and 12 neurons in the hidden layer (i.e., MLP 7-12-3), but we observed that other AR structures were also effective, such as MLP 7-10-3 and MLP 7-14-3. The ANN was able to lower the MSE for the training set to very small values (0.001–0.01) (Table 4 and Table 5, best choice in bold).
Table 4.
Selected ANN quality assessment (the best one is marked in bold).
Table 5.
(R)MSE values for three MLP neural networks (the best one is marked in bold).
The ANN was able to quickly estimate and identify a solution to the problem of selecting/optimising the 3D-printing parameters as a basic or competitive solution to a traditional IT program. For easily programmable tasks with complete and unchecked databases, the first of the above-mentioned solutions can be an advantage. The ANN, however, will work in almost any conditions, providing a better or worse result. Thus, the difference between using a traditional program and an ANN lies in two areas:
- Database completeness;
- Required accuracy.
The results show that the proposed method can provide nonlinear deformation and reflect typical mechanical behaviour (Figure 9 and Figure 10).
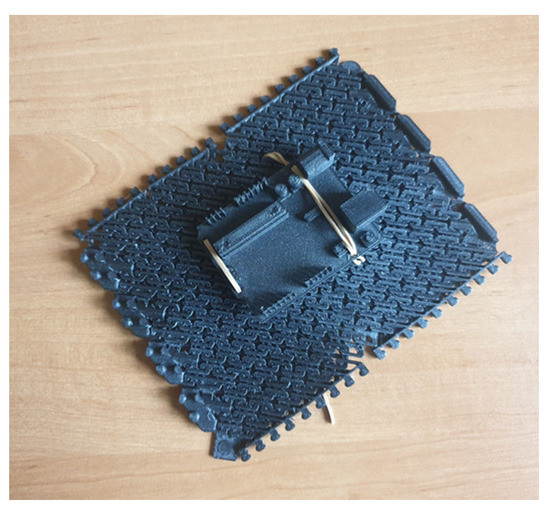
Figure 9.
Chainmail as an element of a hand exoskeleton.
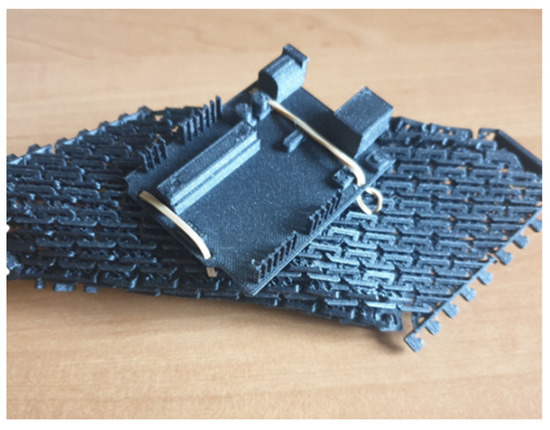
Figure 10.
Possibilities of prepared chainmail for hand exoskeleton folding.
The chainmail capabilities of an exoskeleton prepared for manual folding were measured as follows:
- For unidirectional folding: by wrapping on a shaft of specified diameter;
- For bidirectional folding: by wrapping on a sphere with a specified radius.
The ready-to-use chainmail retained its bending constraint capabilities in the finished product (exoskeleton) (Figure 11).
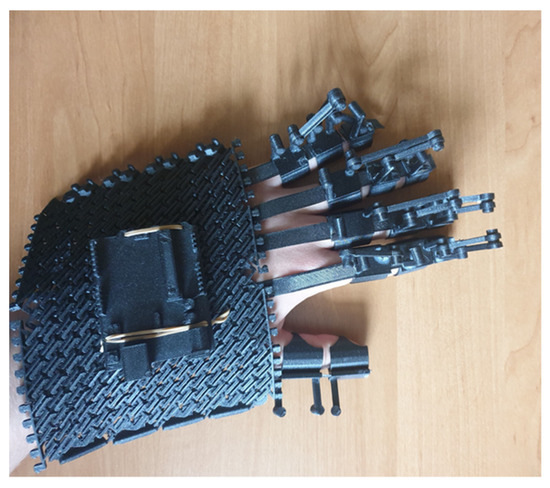
Figure 11.
Chainmail on hand exoskeleton.
4. Discussion
The proposed approaches make it possible to plan, design, and 3D print highly complex products (chainmails) with the ability to customise their properties according to individual user/patient needs. Due to the advanced scientific and clinical needs, the above-mentioned group of technologies is of great interest and can also be used in practical applications in other areas, such as designing smart textiles, protective clothing, etc. [35,36,37,38,39]. Unfortunately, there are too few scientific papers concerning the planning and production of 3D-printed chainmails for biomedical applications to compare our results with those of other researchers. However, perhaps our publication will become an inspiration for further research groups. The topic of 3D printing of chainmails for biomedical purposes is rare in the literature. It seems to have arisen in 2013, but the most important publications are less than three years old. In comparison with other research, chainmail shaping has mostly been used for soft tissue shaping to date [12,13,14], but very general biomedical applications have also been described [35,36,37,38,39]. In the area of soft materials chemistry and methods for fabricating 3D and 4D materials with properties and shapes that can be programmatically altered over time, the ability to control the composition from the molecular scale to the macroscale, which is important for biomimetic and biocompatible materials, is gradually emerging from current research [42]. Shape memory polymers (SMP) are one such direction of development, changing a temporary shape into a permanent one under the influence of external stimuli, which could be especially useful through when combined with 4D printing. At the present stage of development of SMP, various excitation methods and deformation modes are used [43].
The models presented in this article are a promising tool in the field of computational analysis and design of 3D-printed chainmail, which is useful in personalised therapy in clinical applications, not only in the area of exoskeletons, but also orthoses and next-generation active dressings. The mechanical properties of chainmail fabrics do not exhaust all their possibilities: there are already new materials with improved properties when in contact with human and animal tissues and body fluids, and printing from bio-ink allows serious consideration of reconstruction or supporting, for example, the fascia. In addition, strength tests on 3D-printed chainmail fabrics can lead to the creation of new, very light and thin, but mechanically very durable coatings and networks, with many possible technical and health applications (including in reconstructive medicine). However, despite the development of 3D-printing technology, the accuracy of the printing remains a challenge in these proposed solutions [44].
We are aware that we did not check all possible solutions in the field of artificial intelligence; more complex, multidimensional computational problems in the area of chainmail design can be solved with the help of deep learning—these mainly include chainmails with life characteristics that are variable in time and in defined/controlled time. With the help of fuzzy logic and multifractal analysis, problems related to trends in changes in the characteristics of the exoskeleton (e.g., as part of therapy progress, motor ageing) and their creative prediction can be achieved. In some cases, this also applies to uncertainty modelling, including in the case of inconsistent or uncertain data.
Limitations of the research to date relate not only to material issues, but more importantly to combining the physical and chemical properties, form, and function of printed objects with different surface textures and hardnesses (including soft surfaces) and controlled biomimetic and biologically compliant behaviours [42].
Computational analysis of the characteristics of exoskeleton components and other clinical devices can help with the identification of new, more sensitive markers that allow for earlier detection of the very early stages of individual diseases developing in the exoskeleton user and more effective therapy for such harmful changes.
Better control and forecasting of exoskeleton parameters will make it possible to predict damage to the exoskeleton and better meet the requirements for medical devices covered by the MDR and ISO 13485 requirements.
Properly selected properties of the AI system will allow for the flexible connection of many data sources, which makes calculation tools useful in the development of the solutions presented in this article. Some directions of further research include:
- Research on new aircraft with properties described by mathematical formulas;
- Research into new materials and technologies better suited to medical applications;
- Research on changes in the properties of materials and 3D prints from them, including the development of both solutions with increased strength and extended durability, and solutions with a programmed useful life after which they can be easily recycled [6]—this is important for the multicriterion determination of the optimal material parameters for nonlinear properties, so that the realism of the modelling better reflects the real changes (e.g., in the user’s movement system);
- In terms of industrial and clinical applications, the scalability of the proposed method is important, i.e., its susceptibility to the mapping of many elements as the number of elements increases without deterioration of the required characteristics (including directional ones).
Another possible important direction for further research is the further development of a 3D-printing filament that includes keratin protein, which would enable the printing of complex elements of various shapes where the shape memory can be triggered by water.
Major clinical goals can be formulated as follows:
- Facilitation of the proper hand movements;
- Protection of the human hand from injury (including injuries caused by a range of motion (ROM) that is much too large).
Engineering and clinical goals must be reconciled for better functionality of the final solutions. It is worth being aware that there are more and more materials and medical devices, including 3D-printed ones [45]. Materials with biotechnological properties that must be biocompatible should be provided with appropriate certificates [46]. Therefore, it is important to ensure coherent and transparent use of new technologies, materials, and products at every stage of their life cycle [47]. Current personalised 3D-printing solutions support sustainable manufacturing through reduced material waste, energy use, and carbon emissions—this can be additionally strengthened by eHealth solutions [48,49].
5. Conclusions
Our automated or semi-automated, efficient, and practical 3D-printed chainmail design with programmed directional functions for a wrist exoskeleton has variable stiffness/flexibility depending on the direction. We compared the use of traditional software and machine-learning-based software (ANN), with the latter being more efficient for more complex chainmail designs. Generally, new computational tools supporting both diagnosticians and medical engineers can significantly improve the effectiveness in the field of medical device quality and prevention of secondary changes. This will allow better targeting and monitoring of harmful phenomena and faster responses to negative changes in health. Relying on data, analysing trends, and forecasting long-term changes may enable the implementation of novel/modified production processes.
Author Contributions
Conceptualisation, I.R., D.M., J.K. and E.D.; methodology, I.R., D.M., J.K., P.K. and E.D.; software, J.K. and D.M.; validation, I.R., D.M., J.K., P.K. and E.D.; formal analysis, I.R., D.M., J.K., P.K. and E.D.; investigation, I.R., D.M., J.K., P.K. and E.D.; resources, I.R., D.M. and J.K.; data curation, I.R., D.M., J.K., P.K. and E.D.; writing—original draft preparation, I.R., D.M., J.K., P.K. and E.D.; writing—review and editing, I.R., D.M., J.K., P.K. and E.D.; visualisation, I.R., D.M., J.K., P.K. and E.D.; supervision, I.R., D.M. and E.D.; project administration, I.R.; funding acquisition, I.R., D.M. and E.D. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported in part by the grant to maintain research potential of Kazimierz Wielki University and grant no. 0613/SBAD/4710.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Majid, M.; Habib, S.; Javed, A.R.; Rizwan, M.; Srivastava, G.; Gadekallu, T.R.; Lin, J.C. Applications of Wireless Sensor Networks and Internet of Things Frameworks in the Industry Revolution 4.0: A Systematic Literature Review. Sensors 2022, 22, 2087. [Google Scholar] [CrossRef] [PubMed]
- Webert, H.; Döß, T.; Kaupp, L.; Simons, S. Fault Handling in Industry 4.0: Definition, Process and Applications. Sensors 2022, 22, 2205. [Google Scholar] [CrossRef] [PubMed]
- Osterrieder, P.; Budde, L.; Friedli, T. The smart factory as a key construct of Industry 4.0: A systematic literature review. Int. J. Prod. Econ. 2020, 221, 107476. [Google Scholar] [CrossRef]
- Awad, A.; Trenfield, S.J.; Pollard, T.D.; Ong, J.J.; Elbadawi, M.; McCoubrey, L.E.; Goyanes, A.; Gaisford, S.; Basit, A.W. Connected healthcare: Improving patient care using digital health technologies. Adv. Drug Deliv. Rev. 2021, 178, 113958. [Google Scholar] [CrossRef] [PubMed]
- Elbadawi, M.; McCoubrey, L.E.; Gavins, F.K.H.; Ong, J.J.; Goyanes, A.; Gaisford, S.; Basit, A.W. Disrupting 3D printing of medicines with machine learning. Trends Pharmacol. Sci. 2021, 42, 745–757. [Google Scholar] [CrossRef] [PubMed]
- Volk, M.J.; Lourentzou, I.; Mishra, S.; Vo, L.T.; Zhai, C.; Zhao, H. Biosystems Design by Machine Learning. ACS Synth. Biol. 2020, 9, 1514–1533. [Google Scholar] [CrossRef]
- Selvaraj, C.; Chandra, I.; Singh, S.K. Artificial intelligence and machine learning approaches for drug design: Challenges and opportunities for the pharmaceutical industries. Mol. Divers. 2021, 1–21. [Google Scholar] [CrossRef]
- Toptas, E. Innovative approach to the design of mechanical parts. J. Mechatron. Artif. Intell. Eng. 2020, 1, 14–20. [Google Scholar] [CrossRef]
- Huang, Q. Application of Artificial Intelligence in Mechanical Engineering. Adv. Comput. Sci. Res. 2017, 74, 855–860. [Google Scholar]
- Jäger, M.; Mayer, C.; Hefter, H.; Siebler, M.; Kecskeméthy, A. Big data and deep learning in preventive and rehabilitation medicine. Orthopade 2018, 47, 826–833. [Google Scholar] [CrossRef]
- Xu, J.; Song, J. High performance shape memory polymer networks based on rygid nanoparticle cores. Proc. Natl. Acad. Sci. USA 2010, 107, 7652–7657. [Google Scholar] [CrossRef] [PubMed]
- Zhang, J.; Zhong, Y.; Smith, J.; Gu, C. ChainMail based neural dynamics modeling of soft tissue deformation for surgical simulation. Technol. Health Care 2017, 25, 231–239. [Google Scholar] [CrossRef] [PubMed]
- Zhang, J.; Zhong, Y.; Smith, J.; Gu, C. A new ChainMail approach for real-time soft tissue simulation. Bioengineered 2016, 7, 246–252. [Google Scholar] [CrossRef] [PubMed][Green Version]
- Rodríguez, A.; León, A.; Arroyo, G. Parallel deformation of heterogeneous ChainMail models: Application to interactive deformation of large medical volumes. Comput. Biol. Med. 2016, 79, 222–232. [Google Scholar] [CrossRef]
- Memon, A.R.; Li, J.; Egger, J.; Chen, X. A review on patient-specific facial and cranial implant design using Artificial Intelligence (AI) techniques. Expert. Rev. Med. Devices 2021, 18, 985–994. [Google Scholar] [CrossRef]
- Saeidi Pour, R.; Edelhoff, D.; Prandtner, O.; Liebermann, A. Rehabilitation of a patient with amelogenesis imperfecta using porcelain veneers and CAD/CAM polymer restorations: A clinical report. Quintessence Int. 2015, 46, 843–852. [Google Scholar] [CrossRef]
- Ransley, M.; Smitham, P.; Miodownik, M. Active chainmail fabrics for soft robotic applications. Smart Mater. Struct. 2017, 26, 08LT02. [Google Scholar] [CrossRef]
- Cabibihan, J.J.; Alkhatib, F.; Mudassir, M.; Lambert, L.A.; Al-Kwifi, O.S.; Diab, K.; Mahdi, E. Suitability of the Openly Accessible 3D Printed Prosthetic Hands for War-Wounded Children. Front. Robot. AI 2021, 7, 594196. [Google Scholar] [CrossRef]
- Thurzo, A.; Kočiš, F.; Novák, B.; Czako, L.; Varga, I. Three-Dimensional Modeling and 3D Printing of Biocompatible Orthodontic Power-Arm Design with Clinical Application. Appl. Sci. 2021, 11, 9693. [Google Scholar] [CrossRef]
- Thurzo, A.; Urbanová, W.; Novák, B.; Waczulíková, I.; Varga, I. Utilization of a 3D Printed Orthodontic Distalizer for Tooth-Borne Hybrid Treatment in Class II Unilateral Malocclusions. Materials 2022, 15, 1740. [Google Scholar] [CrossRef]
- Hu, F.; Wang, W.; Cheng, J.; Bao, Y. Origami spring–inspired metamaterials and robots: An attempt at fully programmable robotics. Sci. Prog. 2020, 103, 0036850420946162. [Google Scholar] [CrossRef] [PubMed]
- Zhai, Z.; Wu, L.; Jiang, H. Mechanical metamaterials based on origami and kirigami. Appl. Phys. Rev. 2021, 8, 041319. [Google Scholar] [CrossRef]
- Zhu, H.; Li, Z.; Wang, R.; Chen, S.; Zhang, C.; Li, F. Revealing the Dynamic Characteristics of Composite Material-Based Miura-Origami Tube. Materials 2021, 14, 6374. [Google Scholar] [CrossRef] [PubMed]
- Ai, C.; Chen, Y.; Xu, L.; Li, H.; Liu, C.; Shang, F.; Xia, Q.; Zhang, S. Current Development on Origami/Kirigami-Inspired Structure of Creased Patterns toward Robotics. Adv. Eng. Mater. 2021, 23, 2100473. [Google Scholar] [CrossRef]
- Blanco-Ortega, A.; Vázquez-Sánchez, L.; Adam-Medina, M.; Colín-Ocampo, J.; Abúndez-Pliego, A.; Cortés-García, C.; García-Beltrán, C.D. A Robust Controller for Upper Limb Rehabilitation Exoskeleton. Appl. Sci. 2022, 12, 1178. [Google Scholar] [CrossRef]
- Chae, S.; Choi, A.; Jung, H.; Kim, T.H.; Kim, K.; Mun, J.H. Machine Learning Model to Estimate Net Joint Moments during Lifting Task Using Wearable Sensors: A Preliminary Study for Design of Exoskeleton Control System. Appl. Sci. 2021, 11, 11735. [Google Scholar] [CrossRef]
- Meng, Q.; Shen, Z.; Nie, Z.; Meng, Q.; Wu, Z.; Yu, H. Modeling and Evaluation of a Novel Hybrid-Driven Compliant Hand Exoskeleton Based on Human-Machine Coupling Model. Appl. Sci. 2021, 11, 10825. [Google Scholar] [CrossRef]
- Lee, H.-W.; Lee, K.-O.; Chae, Y.-J.; Kim, S.-Y.; Park, Y.-Y. A Time-Scalable Posture Detection Algorithm for Paraplegic Patient Rehabilitation Using Exoskeleton-Type Wearable Robots. Appl. Sci. 2022, 12, 2374. [Google Scholar] [CrossRef]
- Rojek, I.; Mikołajewski, D.; Dostatni, E.; Macko, M. AI-Optimized Technological Aspects of the Material Used in 3D Printing Processes for Selected Medical Applications. Materials 2020, 13, 5437. [Google Scholar] [CrossRef]
- Hossain, N.; Chowdhury, M.A.; Shuvho, M.B.A.; Kashem, M.A.; Kchaou, M. 3D-Printed Objects for Multipurpose Applications. J. Mater. Eng. Perform. 2021, 30, 4756–4767. [Google Scholar] [CrossRef]
- Rojek, I.; Mikołajewski, D.; Dostatni, E. Digital Twins in Product Lifecycle for Sustainability in Manufacturing and Maintenance. Appl. Sci. 2021, 11, 31. [Google Scholar] [CrossRef]
- Mahmood, M.A.; Visan, A.I.; Ristoscu, C.; Mihailescu, I.N. Artificial Neural Network Algorithms for 3D Printing. Materials 2020, 14, 163. [Google Scholar] [CrossRef] [PubMed]
- Regulation (Eu) 2017/745 of the European Parliament and of the Council of 5 April 2017 on Medical Devices, Amending Directive 2001/83/EC, Regulation (EC) No 178/2002 and Regulation (EC) No 1223/2009 and Repealing Council Directives 90/385/EEC and 93/42/EEC. Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/PDF/?uri=CELEX:32017R0745 (accessed on 8 March 2022).
- ISO 13485:2016 Medical Devices Quality Management Systems. Available online: https://www.iso.org/obp/ui#iso:std:iso:13485:ed-3:v1:en (accessed on 8 March 2022).
- Płoszajski, A.R.; Jackson, R.; Ransley, M.; Miodownik, M. 4D printing of magnetically functionalized chainmail for exoskeletal biomedical applications. MRS Adv. 2019, 4, 1361–1366. [Google Scholar] [CrossRef]
- Wang, Y.; Li, L.; Hofmann, D.; Andrade, J.E.; Daraio, C. Structured fabrics with tunable mechanical properties. Nature 2021, 596, 238–243. [Google Scholar] [CrossRef]
- YunáHann, S.; GraceáZhang, L.; KumaráMaiti, T. 4D printing in biomedical applications: Emerging trends and technologies. J. Mater. Chem. B 2021, 9, 7608–7632. [Google Scholar]
- Fu, P.; Li, H.; Gong, J.; Fan, Z.; Smith, A.T.; Shen, K.; Khalfalla, T.O.; Huang, H.; Qian, X.; McCutcheon, J.R.; et al. 4D Printing of Polymeric Materials: Techniques, Materials, and Prospects. Prog. Polym. Sci. 2022, 126, 101506. [Google Scholar] [CrossRef]
- Fernandez, S.V.; Cai, F.; Chen, S.; Suh, E.; Tiepelt, J.; McIntosh, R.; Marcus, C.; Acosta, D.; Mejorado, D.; Dagdeviren, C. On-Body Piezoelectric Energy Harvesters through Innovative Designs and Conformable Structures. ACS Biomater. Sci. Eng. 2021, 1–17. [Google Scholar] [CrossRef]
- Kopowski, J.; Mikołajewski, D.; Macko, M.; Rojek, I. Bydgostian hand exoskeleton-own concept and the biomedical factors. Bio-Algorithms Med-Syst. 2019, 15, 20190003. [Google Scholar] [CrossRef]
- Kataria, S.; Ravindran, V. Musculoskeletal care-at the confluence of data science, sensors, engineering, and computation. BMC Musculoskelet Disord. 2022, 23, 169. [Google Scholar] [CrossRef]
- Taylor, J.M.; Luan, H.; Lewis, J.A.; Rogers, J.A.; Nuzzo, R.G.; Braun, P.V. Biomimetic and Biologically Compliant Soft Architectures via 3D and 4D Assembly Methods: A Perspective. Adv. Mater. 2022, 34, 2108391. [Google Scholar] [CrossRef]
- Zhang, J.; Yin, Z.; Ren, L.; Liu, Q.; Ren, L.; Yang, X.; Zhou, X. Advances in 4D Printed Shape Memory Polymers: From 3D Printing, Smart Excitation, and Response to Applications. Adv. Mater. Technol. 2022, 210156. [Google Scholar] [CrossRef]
- Bean, P.; Lopez-Anido, R.A.; Vel, S. Numerical Modeling and Experimental Investigation of Effective Elastic Properties of the 3D Printed Gyroid Infill. Appl. Sci. 2022, 12, 2180. [Google Scholar] [CrossRef]
- Dudley, D.R.; Knarr, B.A.; Siu, K.C.; Peck, J.; Ricks, B.; Zuniga, J.M. Testing of a 3D printed hand exoskeleton for an individual with stroke: A case study. Disabil. Rehabil. Assist. Technol. 2021, 16, 209–213. [Google Scholar] [CrossRef] [PubMed]
- Webster, R.; Haluck, R.; Ravenscroft, R.; Mohler, B.; Crouthamel, E.; Frack, T.; Terlecki, S.; Sheaffer, J. Elastically deformable 3D organs for haptic surgical simulation. Stud. Health Technol. Inform. 2002, 85, 570–572. [Google Scholar] [PubMed]
- Meier, U.; López, O.; Monserrat, C.; Juan, M.C.; Alcañiz, M. Real-time deformable models for surgery simulation: A survey. Comput. Methods Programs Biomed. 2005, 77, 183–197. [Google Scholar] [CrossRef]
- Nadagouda, M.N.; Ginn, M.; Rastogi, V. A review of 3D printing techniques for environmental applications. Curr. Opin. Chem. Eng. 2020, 28, 173–178. [Google Scholar] [CrossRef]
- Thurzo, A.; Kurilová, V.; Varga, I. Artificial Intelligence in Orthodontic Smart Application for Treatment Coaching and Its Impact on Clinical Performance of Patients Monitored with AI-TeleHealth System. Healthcare 2021, 9, 1695. [Google Scholar] [CrossRef]












Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).