
Influence of Foundation Deformation and Vehicle Parameters on the Vertical Safety of High-Speed Trains


Abstract
:1. Introduction
2. Model and Method
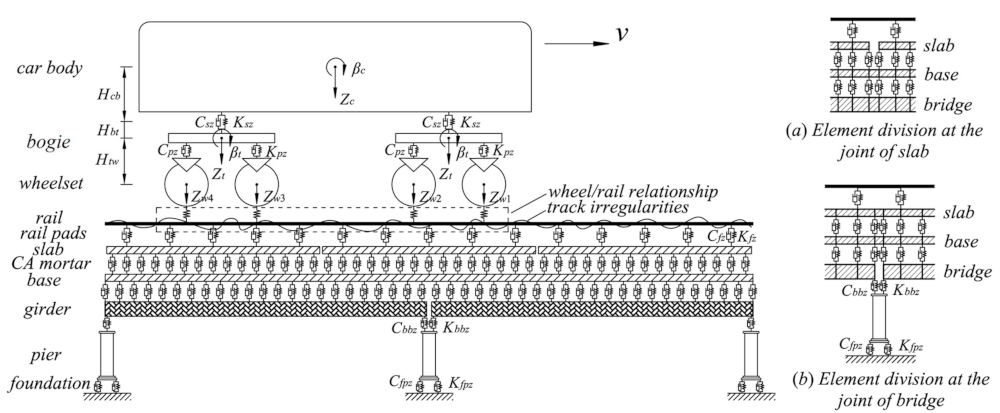
2.1. Model of Vertical Vehicle–Track–Bridge
2.2. Track Irregularity Simulation Method
2.3. Probability Density Evolution Method for Nonlinear Stochastic Analysis
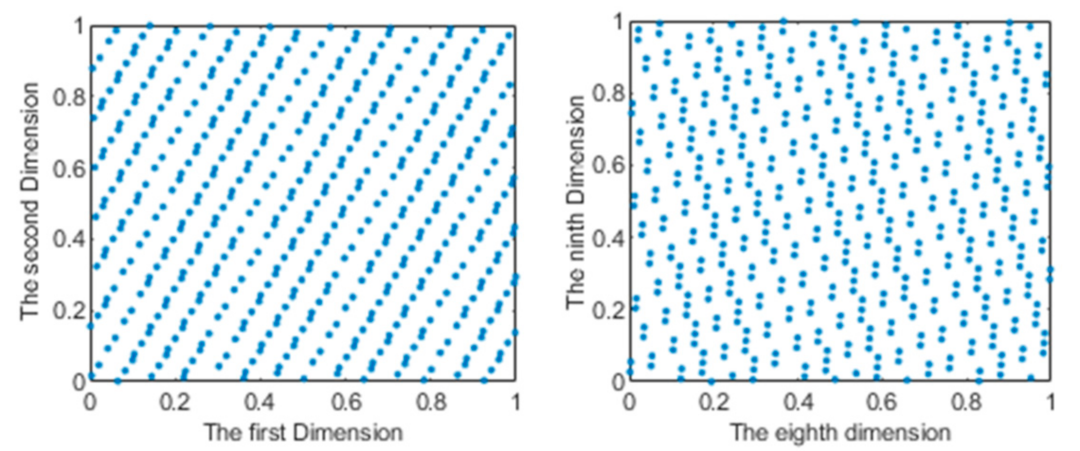
2.3.1. Multi-Distribution Stochastic Sample Selection Method
2.3.2. Probability Density Evolution Method
3. Model Validation
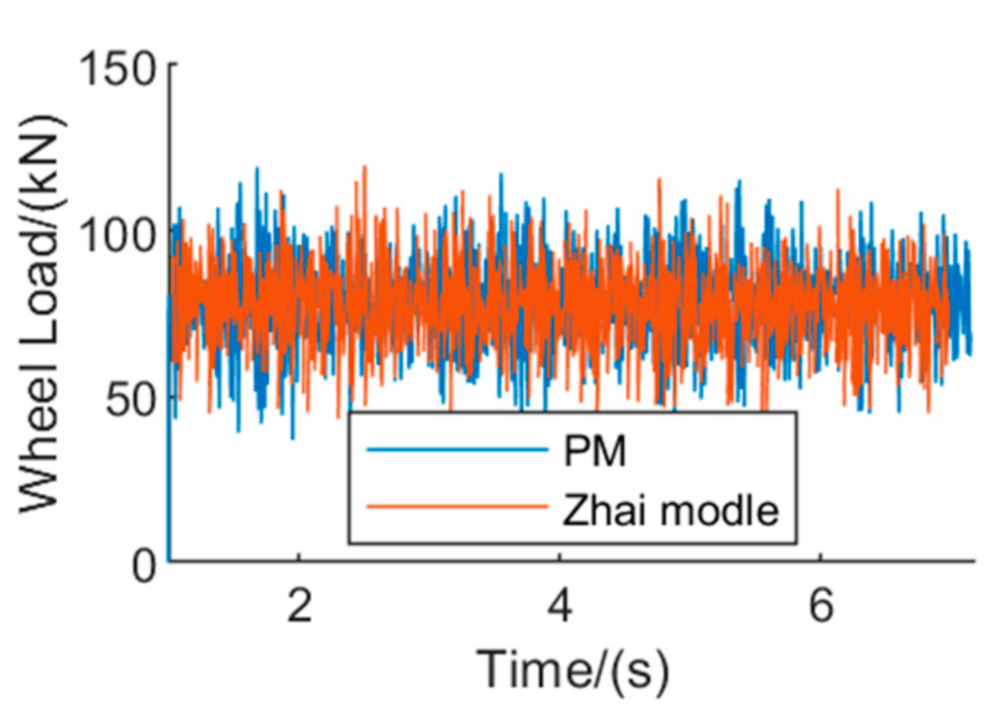
3.1. Coupling Model of Vertical Vehicle–Track–Bridge
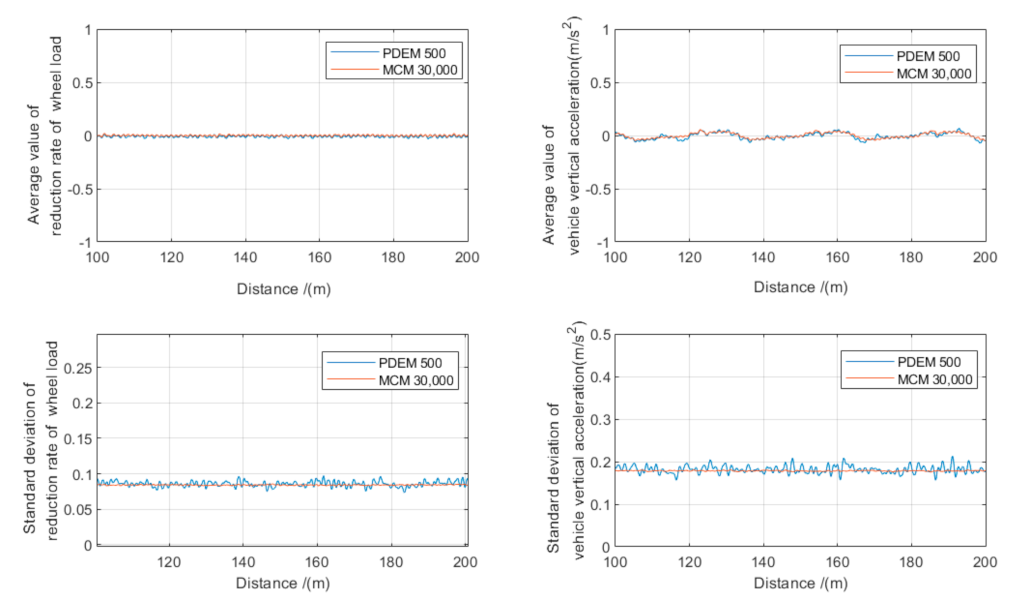
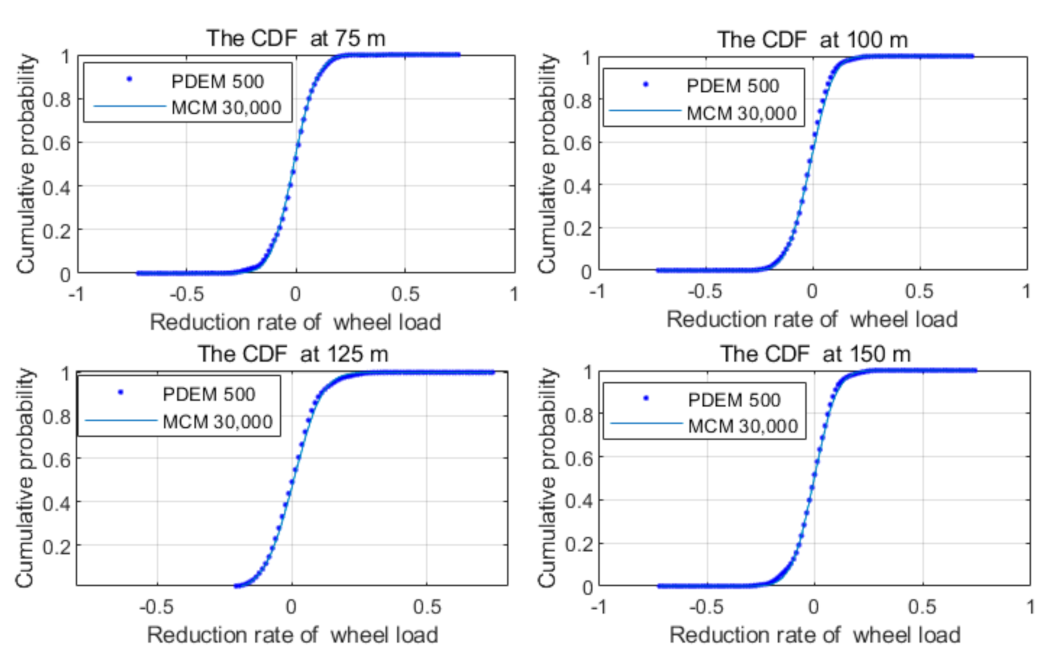
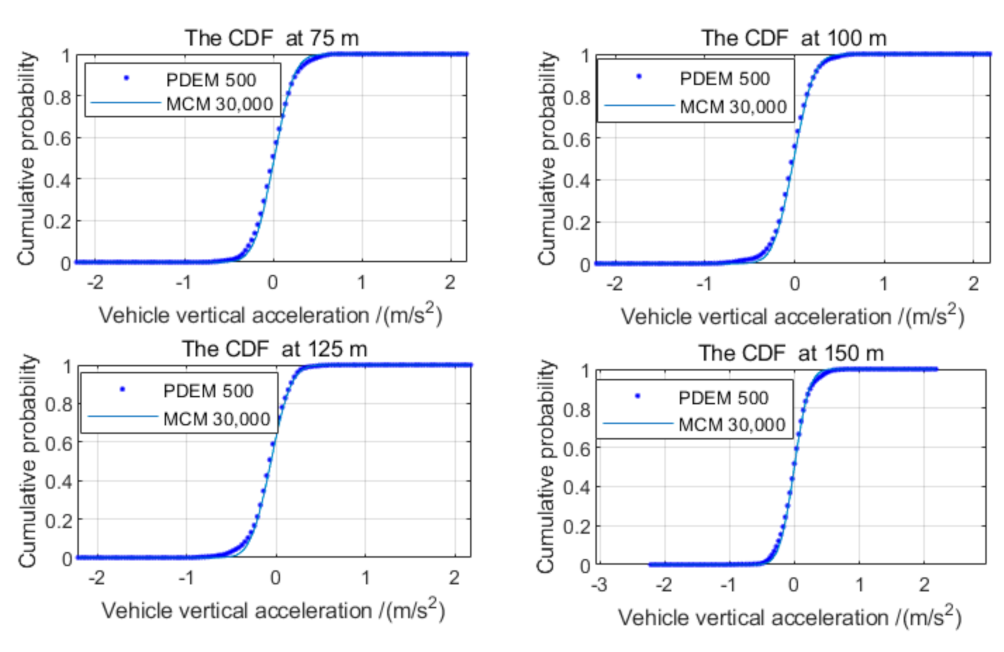
3.2. Probability Density Evolution Method
4. Numerical Results and Discussion
4.1. Comparison of the Influence of Up-Arch and Settlement on Vehicle Operational Safety
4.2. The Impact of Stochastic Vehicle Parameters on the Safety of Vehicle Operation
4.3. Comprehensive Influence of the Amplitude, Speed and VCVP on Operation Safety
5. Conclusions
- (1)
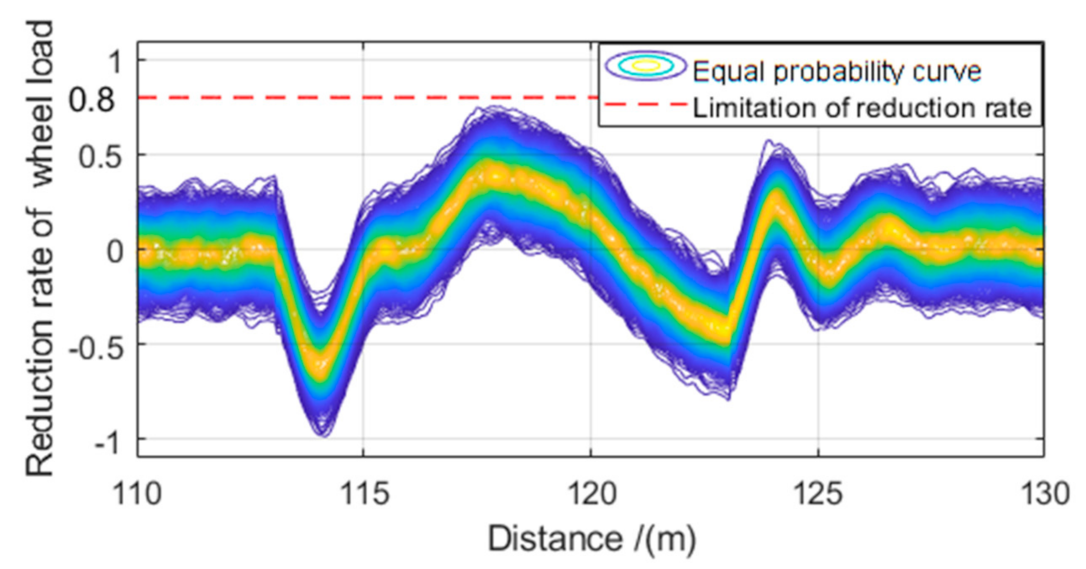
- The vertical acceleration at the center plate and the dynamic reduction rate of wheel load under the influence of different foundation deformation amplitudes were calculated. Compared with the limit of 0.13 g of the vertical acceleration, the limit of 0.8 of the reduction rate of wheel load is more strict.
- (2)
- From the point of view of reliability, settlement is more harmful to vehicle safety than up-arch. In the case of a wavelength of 10 m, the amplitude is 12 mm, VCVP is 0, and the operation speed is 350 km/h; the reliability of operation safety in settlement compared to the up-arch was reduced by 0.0293, corresponding to about 3.02%. With the increase of VCVP, the influence of settlement was more significant.
- (3)
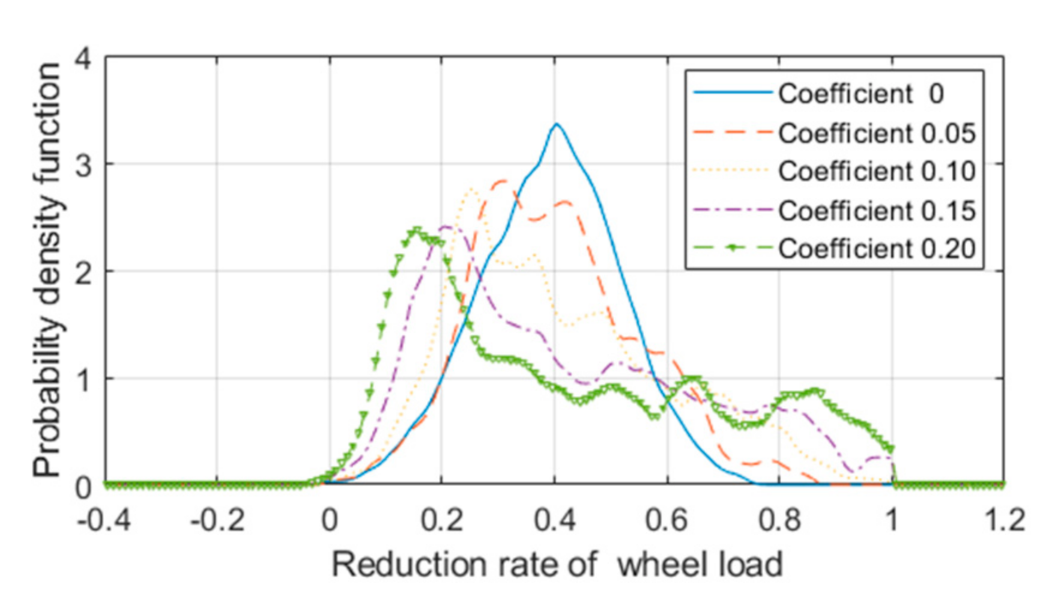
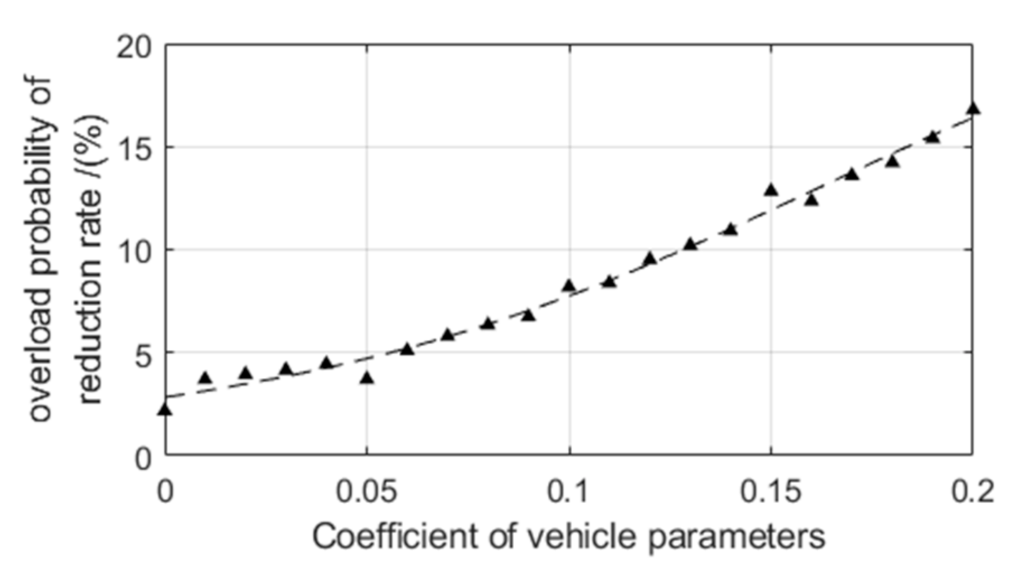
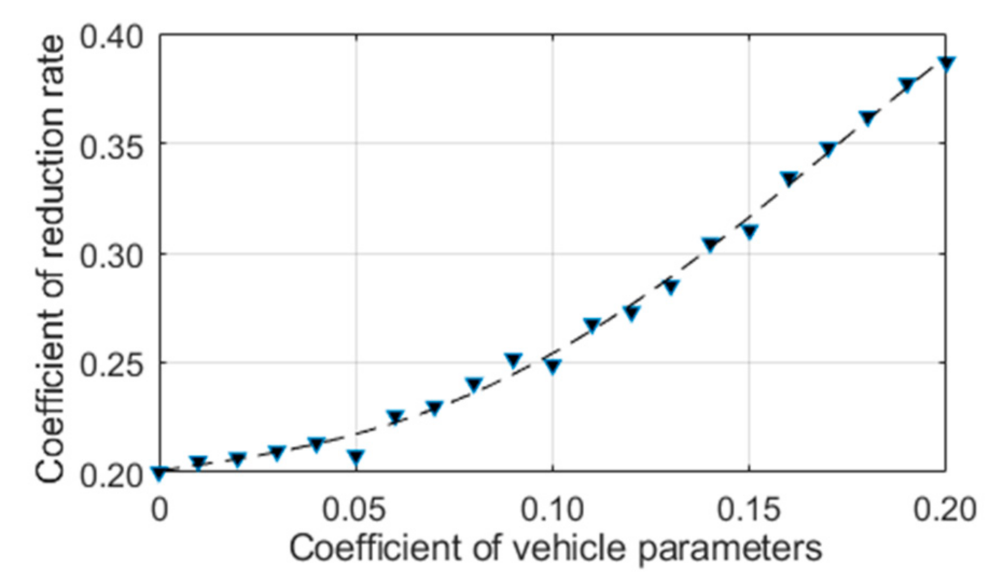
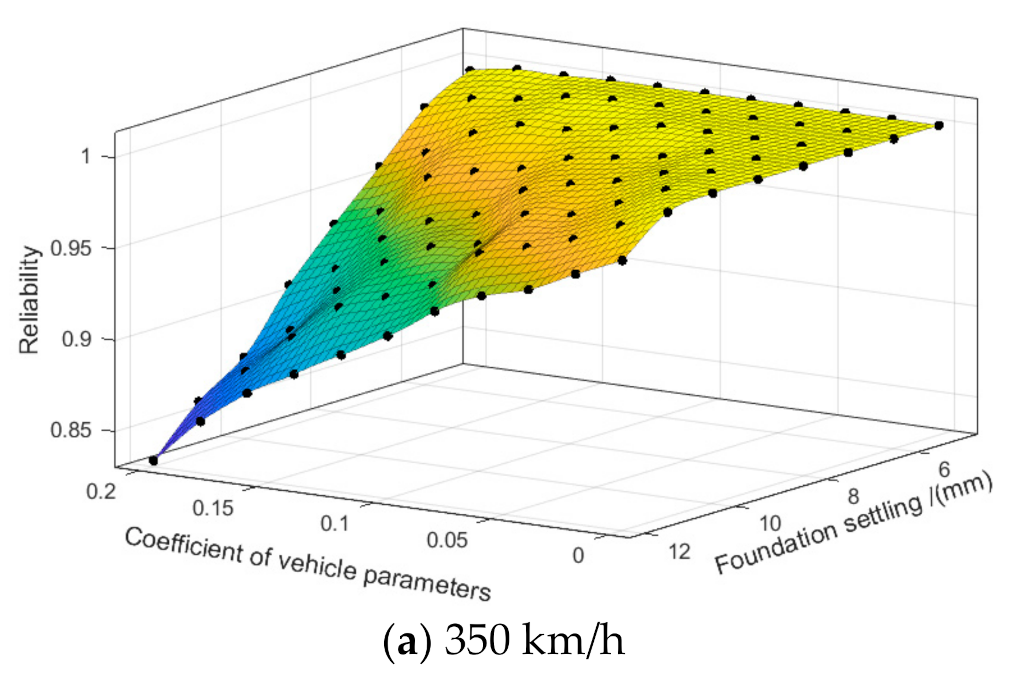
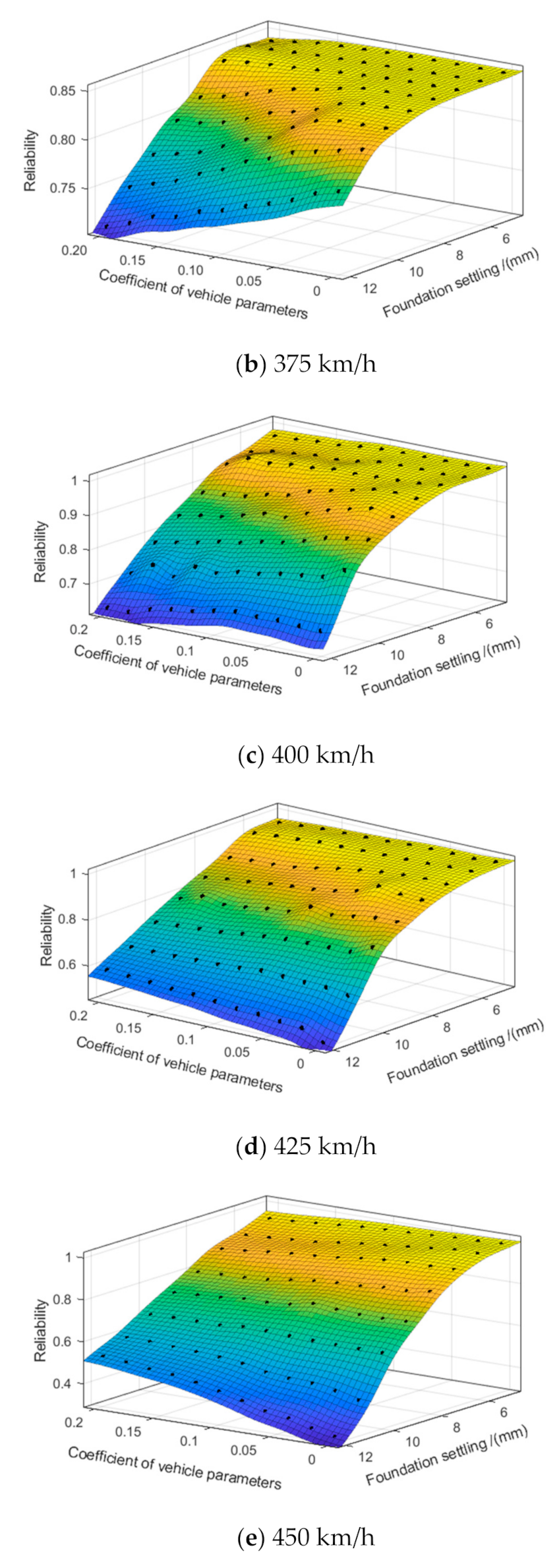
- The stochasticity of the vehicle parameters has a non-negligible impact on the vehicle vertical safety, and the increase of the dispersion of vehicle parameters will gradually reduce the safety of vehicle operation. Regardless of the influence of the stochasticity of the vehicle parameters (speed 350 km/h), a deformation amplitude of 10 mm will not affect the reliability of operation safety. However, considering the certain dispersion of vehicle parameters, a deformation amplitude greater than 6 mm will affect the operation reliability.
- (4)
- When the operation speed is higher than 375 km/h, the amplitude of track irregularities will have a greater impact on the safety of vehicle operation. Therefore, in the design, construction, and operation of higher-speed trains, it is necessary to adopt more stringent standards for bridge structure deformation. In addition, it can be seen from the calculation results that there is a better combination of vehicle parameters at higher driving speeds.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhai, W.; Han, Z.; Chen, Z.; Ling, L.; Zhu, S. Train–track–bridge dynamic interaction: A state-of-the-art review. Veh. Syst. Dyn. 2019, 57, 984–1027. [Google Scholar] [CrossRef] [Green Version]
- Chen, X.; Deng, X.; Xu, L. A Three-Dimensional Dynamic Model for Railway Vehicle-Track Interactions. J. Comput. Nonlinear Dyn. 2018, 13, 071006. [Google Scholar] [CrossRef]
- Chen, Z.; Zhai, W.; Cai, C.; Sun, Y. Safety threshold of high-speed railway pier settlement based on train-track-bridge dynamic interaction. Sci. China-Technol. Sci. 2015, 58, 202–210. [Google Scholar] [CrossRef]
- Chen, Z.; Zhai, W.; Tian, G. Study on the safe value of multi-pier settlement for simply supported girder bridges in high-speed railways. Struct. Infrastruct. Eng. 2018, 14, 400–410. [Google Scholar] [CrossRef]
- Chen, Z.; Zhai, W.; Yin, Q. Analysis of structural stresses of tracks and vehicle dynamic responses in train-track-bridge system with pier settlement. Proc. Inst. Mech. Eng. Part F-J. Rail Rapid Transit. 2018, 232, 421–434. [Google Scholar] [CrossRef]
- Chen, Z.; Xu, L.; Zhai, W. Investigation on the Detrimental Wavelength of Track Irregularity for the Suspended Monorail Vehicle System. In Railway Development, Operations, and Maintenance: Proceedings of the First International Conference on Rail Transportation 2017 (Icrt 2017); Zhai, W.M., Wang, K.C.P., Eds.; American Society of Civil Engineers: New York, NY, USA, 2018; pp. 161–168. Available online: https://www.webofscience.com/wos/alldb/summary/38e078ea-3e23-440c-a0e1-08e2cc564f9f-1f698566/relevance/1 (accessed on 18 January 2022).
- Zhai, W.; Wang, S.; Zhang, N.; Gao, M.; Xia, H.; Cai, C.; Zhao, C. High-speed train–track–bridge dynamic interactions—Part II: Experimental validation and engineering application. Int. J. Rail Transp. 2013, 1, 25–41. [Google Scholar] [CrossRef]
- Zhai, W.; Xia, H.; Cai, C.; Gao, M.; Li, X.; Guo, X.; Zhang, N.; Wang, K. High-speed train–track–bridge dynamic interactions—Part I: Theoretical model and numerical simulation. Int. J. Rail Transp. 2013, 1, 3–24. [Google Scholar] [CrossRef]
- Zeng, Z.-P.; Xiao, Y.-C.; Wang, W.-D.; Huang, X.-D.; Du, X.-G.; Liu, L.-L.; Victor, J.E.; Xie, Z.-L.; Yuan, Y.; Wang, J.-D. The Influence of Track Structure Parameters on the Dynamic Response Sensitivity of Heavy Haul Train-LVT System. Appl. Sci. 2021, 11, 11830. [Google Scholar] [CrossRef]
- Saramago, G.; Montenegro, P.A.; Ribeiro, D.; Silva, A.; Santos, S.; Calçada, R. Experimental Validation of a Double-Deck Track-Bridge System under Railway Traffic. Sustainability 2022, 14, 5794. [Google Scholar] [CrossRef]
- Zhao, G.; Cai, X.; Liu, W.; Wang, T.; Wang, T. Mechanical Properties and Structural Optimization of Continuous Welded Rail on Super-Long-Span Suspension Bridges for High-Speed Railway. Appl. Sci. 2021, 12, 305. [Google Scholar] [CrossRef]
- Sakhare, A.; Farooq, H.; Nimbalkar, S.; Dodagoudar, G.R. Dynamic Behavior of the Transition Zone of an Integral Abutment Bridge. Sustainability 2022, 14, 4118. [Google Scholar] [CrossRef]
- Zhang, T.; Jin, T.; Luo, J.; Zhu, S.; Wang, K. Stochastic Analysis on the Resonance of Railway Trains Moving over a Series of Simply Supported Bridges. Shock. Vib. 2021, 2021, e1491207. [Google Scholar] [CrossRef]
- Luo, J.; Zeng, Z. A novel algorithm for longitudinal track-bridge interactions considering loading history and using a verified mechanical model of fasteners. Eng. Struct. 2019, 183, 52–68. [Google Scholar] [CrossRef]
- Chang, W.; Cai, X.; Wang, Q.; Tang, X.; Sun, J.; Yang, F. The Influence of Track Irregularity in Front of the Turnout on the Dynamic Performance of Vehicles. Appl. Sci. 2022, 22, 4169. [Google Scholar] [CrossRef]
- Gu, Q.; Pan, J.; Liu, Y.; Fu, M.; Zhang, J. An Effective Tangent Stiffness of Train–Track–Bridge Systems Based on Artificial Neural Network. Appl. Sci. 2022, 12, 2735. [Google Scholar] [CrossRef]
- Dou, Y.; Wang, P.; Ding, W.; Wang, S.; Wei, K. Effect of viscoelastic-plastic dynamic properties of rail pads on curved rail dynamic characteristics based on the modified SEM-SM hybrid method. Veh. Syst. Dyn. 2022, 1–25. [Google Scholar] [CrossRef]
- Luo, J.; Zhu, S.; Zhai, W. Development of a track dynamics model using Mindlin plate theory and its application to coupled vehicle-floating slab track systems. Mech. Syst. Signal Process. 2020, 140, 106641. [Google Scholar] [CrossRef]
- Luo, J.; Zhu, S.; Zhai, W. An advanced train-slab track spatially coupled dynamics model: Theoretical methodologies and numerical applications. J. Sound Vib. 2021, 501, 116059. [Google Scholar] [CrossRef]
- Luo, J.; Zhu, S.; Zhai, W. Exact closed-form solution for free vibration of Euler-Bernoulli and Timoshenko beams with intermediate elastic supports. Int. J. Mech. Sci. 2022, 213, 106842. [Google Scholar] [CrossRef]
- Luo, J.; Zhu, S.; Zhai, W. Formulation of curved beam vibrations and its extended application to train-track spatial interactions. Mech. Syst. Signal Process. 2022, 165, 108393. [Google Scholar] [CrossRef]
- Chiacchiari, L.; Loprencipe, G. Measurement methods and analysis tools for rail irregularities: A case study for urban tram track. J. Mod. Transp. 2015, 23, 137–147. [Google Scholar] [CrossRef]
- Chiacchiari, L.; Thompson, D.; Squicciarini, G.; Ntotsios, E.; Loprencipe, G. Rail roughness and rolling noise in tramways. J. Phys. Conf. Ser. 2016, 744, 012147. [Google Scholar] [CrossRef] [Green Version]
- Sheng, X.; Jones, C.J.C.; Thompson, D.J. A theoretical model for ground vibration from trains generated by vertical track irregularities. J. Sound Vib. 2004, 272, 937–965. [Google Scholar] [CrossRef]
- Grassie, S.L. Rail corrugation: Advances in measurement, understanding and treatment. Wear 2005, 258, 1224–1234. [Google Scholar] [CrossRef]
- Grassie, S.L. Squats and squat-type defects in rails: The understanding to date. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2012, 226, 235–242. [Google Scholar] [CrossRef]
- Cai, C.B.; Zhai, W.M.; Wang, Q.C. Study on Allowable Safety Criterion of Track Geometric Irregularities. J. China Railw. Soc. 1995, 17, 82–87. [Google Scholar]
- Zhai, W. Vehicle-Track-Coupled Dynamics, 3rd ed.; Science Press: Beijing, China, 2007. [Google Scholar]
- Chen, G.; Zhai, W.M.; Zuo, H.F. Safety Management of Track Irregularities of 250 km/h High-Speed Railway. J. Southwest Jiaotong Univ. 2001, 36, 495–499. [Google Scholar]
- Li, M.H.; Li, L.L.; He, X.Y. Research on the Control of Track Irregularity of High-speed Railway. J. Raiway Eng. Soc. 2009, 26, 26–30. [Google Scholar]
- Tian, G.; Gao, J.M.; Zhai, W.M. Comparative Analysis of Track Irregularity Management Standards for High-speed Railways. J. China Railw. Soc. 2015, 37, 64–71. [Google Scholar]
- Tian, G.; Gao, J.M.; Zhai, W.M. A Method for Estimation of Track Irregularity Limits Using Track Irregularity Power Spectrum Density of High-speed Railway. J. China Railw. Soc. 2015, 37, 83–90. [Google Scholar]
- Gao, J.M.; Zhai, W.M.; Wang, K.Y. Study on Sensitive Wavelengths of Track Irregularities in High-speed Operation. J. China Railw. Soc. 2012, 34, 83–88. [Google Scholar]
- Chen, Z.; Bi, L.; Zhao, J. Comparison of single-pier settlement model and multi-pier settlement model in solving train-track-bridge interaction. Veh. Syst. Dyn. 2021, 59, 1484–1508. [Google Scholar] [CrossRef]
- Zeng, Z.; Yu, Z.; Zhao, Y.-G.; Xu, W.; Chen, L.-K.; Lou, P. Numerical Simulation of Vertical Random Vibration of Train-Slab Track-Bridge Interaction System by PEM. Shock. Vib. 2014, 2014, e304219. [Google Scholar] [CrossRef] [Green Version]
- Zeng, Z.; He, X.; Zhao, Y.; Yu, Z.; Chen, L.; Xu, W.; Lou, P. Random vibration analysis of train-slab track-bridge coupling system under earthquakes. Struct. Eng. Mech. 2015, 54, 1017–1044. [Google Scholar] [CrossRef]
- Zeng, Z.-P.; Liu, F.-S.; Lou, P.; Zhao, Y.-G.; Peng, L.-M. Formulation of three-dimensional equations of motion for train-slab track-bridge interaction system and its application to random vibration analysis. Appl. Math. Model. 2016, 40, 5891–5929. [Google Scholar] [CrossRef]
- Wan, H.-P.; Ni, Y.-Q. An efficient approach for dynamic global sensitivity analysis of stochastic train-track-bridge system. Mech. Syst. Signal Process. 2019, 117, 843–861. [Google Scholar] [CrossRef]
- Li, J. A PDEM-based perspective to engineering reliability: From structures to lifeline networks. Front. Struct. Civ. Eng. 2020, 14, 1056–1065. [Google Scholar] [CrossRef]
- Li, J.; Chen, J. The probability density evolution method for analysis of dynamic nonlinear response of stochastic structures. Chin. J. Theor. Appl. Mech. 2003, 35, 716–722. [Google Scholar]
- Li, J.; Chen, J. Some research progress of probability density evolution theory. Appl. Math. Mech. 2017, 38, 32–43. [Google Scholar]
- Yu, Z.; Mao, J. Probability analysis of train-track-bridge interactions using a random wheel/rail contact model. Eng. Struct. 2017, 144, 120–138. [Google Scholar] [CrossRef]
- Yu, Z.; Mao, J.; Tan, S.; Zeng, Z. The Stochastic Analysis of the Track-bridge Vertical Coupled Vibration with Random Train Parameters. J. China Railw. Soc. 2015, 37, 97–104. [Google Scholar]
- Mao, J.; Yu, Z.; Xiao, Y.; Jin, C.; Bai, Y. Random dynamic analysis of a train-bridge coupled system involving random system parameters based on probability density evolution method. Probabilistic Eng. Mech. 2016, 46, 48–61. [Google Scholar] [CrossRef]
- Xu, L.; Zhai, W.; Gao, J. A probabilistic model for track random irregularities in vehicle/track coupled dynamics. Appl. Math. Model. 2017, 51, 145–158. [Google Scholar] [CrossRef]
- Liu, F.-S.; Zeng, Z.-P.; Wang, W.-D.; Shuaibu, A.A. Stochastic Analysis of Nonlinear Vehicle-Track Coupled Dynamic System and Its Application in Vehicle Operation Safety Evaluation. Shock. Vib. 2019, 2019, e3236093. [Google Scholar] [CrossRef]
- Liu, F.; Zeng, Z.; Guo, W.; Zhu, Z. Random vibration analysis of vehicle-track-bridge vertical coupling system considering wheel-rail nonlinear contact. J. Vib. Eng. 2020, 33, 139–148. [Google Scholar]
- Zhai, W. Vehicle–Track Coupled Dynamics: Theory and Applications; Springer: Singapore, 2020. [Google Scholar] [CrossRef]
- Zhai, W.; Wang, K.; Cai, C. Fundamentals of vehicle–track coupled dynamics. Veh. Syst. Dyn. 2009, 47, 1349–1376. [Google Scholar] [CrossRef]
- Zhai, W.M.; Cai, C.B.; Guo, S.Z. Coupling Model of Vertical and Lateral Vehicle/Track Interactions. Veh. Syst. Dyn. 1996, 26, 61–79. [Google Scholar] [CrossRef]
- Zhai, W.M.; Xia, H. Train-Track-Bridge Dynamic Interaction:Theory and Engineering Application; Science Press: Beijing, China, 2011. [Google Scholar]
- Zhai, W. Two simple fast integration methods for large-scale dynamic problems in engineering. Int. J. Numer. Methods Eng. 1996, 39, 4199–4214. [Google Scholar] [CrossRef]
- Wang, F.; Zhou, J.; Ren, L. Analysis on track spectrum density for dynamic simulations of high-speed vehicles. J. China Railw. Soc. 2002, 24, 21–27. [Google Scholar]
- Liu, Y.; Li, F.; Huang, Y. Numerical Simulation Methods of Railway Track Irregularities. J. Traffic Transp. Eng. 2006, 6, 29–33. [Google Scholar]
- Liu, Z.; Liu, W.; Peng, Y. Random function based spectral representation of stationary and non-stationary stochastic processes. Probabilistic Eng. Mech. 2016, 45, 115–126. [Google Scholar] [CrossRef]
- TB/T 3352-2014; PSD of Ballastless Track Irregularities of High-Speed Railway. National Railway Administration: Beijing, China, 2014.
- Hua, L.G.; Wang, Y.; Pei, D.Y. On the independent unit system of the sub-circular domain. Chin. J. Nat. 1978, 1, 6. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Unit | ICE3 | CRH380A |
|---|---|---|---|
| Body mass | kg | 48 × 103 | 33.77 × 103 |
| Bogie mass | kg | 3.2 × 103 | 2.4 × 103 |
| Wheel pair mass | kg | 2.4 × 103 | 1.85 × 103 |
| Body inertia | kg·m2 | 2.7 × 106 | 1.65 × 106 |
| Bogie inertia | kg·m2 | 7.2 × 103 | 1.31 × 103 |
| Stiffness of single stage suspension | kN/m | 1.04 × 103 | 1.18 × 103 |
| Stiffness of secondary suspension | kN/m | 0.4 × 103 | 0.26 × 103 |
| Damping of single stage suspension | kN·s/m | 0 | 500 |
| Damping of secondary suspension | kN·s/m | 0 | 196 |
| Half of the vehicle’s fixed distance | m | 8.6875 | 8.75 |
| Half of the bogie wheelbase | m | 1.25 | 1.25 |
| Wheel rolling circle radius | m | 0.46 | 0.43 |
| Speed (km/h) | 350 | 375 | 400 | 425 | 450 | |
|---|---|---|---|---|---|---|
| Amplitude | ||||||
| 5 mm | 1.0000 | 1.0000 | 0.9997 | 0.9959 | 0.9925 | |
| 6 mm | 1.0000 | 1.0000 | 0.9973 | 0.9929 | 0.9826 | |
| 7 mm | 1.0000 | 0.9993 | 0.9966 | 0.9745 | 0.9426 | |
| 8 mm | 1.0000 | 0.9973 | 0.9798 | 0.9430 | 0.8733 | |
| 9 mm | 1.0000 | 0.9898 | 0.9487 | 0.8857 | 0.7641 | |
| 10 mm | 1.0000 | 0.9717 | 0.9055 | 0.8144 | 0.6511 | |
| 11 mm | 0.9974 | 0.9462 | 0.8407 | 0.6426 | 0.4604 | |
| 12 mm | 0.9685 | 0.8777 | 0.6864 | 0.4763 | 0.3224 | |
| Speed (km/h) | 350 | 375 | 400 | 425 | 450 | |
|---|---|---|---|---|---|---|
| Amplitude | ||||||
| 5 mm | 1.0000 | 0.9985 | 0.9945 | 0.9788 | 0.9718 | |
| 6 mm | 1.0000 | 0.9962 | 0.9816 | 0.9775 | 0.9399 | |
| 7 mm | 0.9954 | 0.9928 | 0.9815 | 0.9372 | 0.9088 | |
| 8 mm | 0.9859 | 0.9746 | 0.9392 | 0.8840 | 0.8333 | |
| 9 mm | 0.9759 | 0.9462 | 0.8868 | 0.8255 | 0.7565 | |
| 10 mm | 0.9542 | 0.9103 | 0.8378 | 0.7564 | 0.6670 | |
| 11 mm | 0.9391 | 0.8795 | 0.7727 | 0.6559 | 0.5461 | |
| 12 mm | 0.9181 | 0.7967 | 0.6827 | 0.5488 | 0.4499 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, W.; Zeng, Z.; Liu, F.; Wang, W. Influence of Foundation Deformation and Vehicle Parameters on the Vertical Safety of High-Speed Trains. Appl. Sci. 2022, 12, 5704. https://doi.org/10.3390/app12115704
Guo W, Zeng Z, Liu F, Wang W. Influence of Foundation Deformation and Vehicle Parameters on the Vertical Safety of High-Speed Trains. Applied Sciences. 2022; 12(11):5704. https://doi.org/10.3390/app12115704
Chicago/Turabian StyleGuo, Wuji, Zhiping Zeng, Fushan Liu, and Weidong Wang. 2022. "Influence of Foundation Deformation and Vehicle Parameters on the Vertical Safety of High-Speed Trains" Applied Sciences 12, no. 11: 5704. https://doi.org/10.3390/app12115704