



Research on a Measurement Method for the Ocean Wave Field Based on Stereo Vision


Abstract
:Featured Application
Abstract
1. Introduction
- (1)
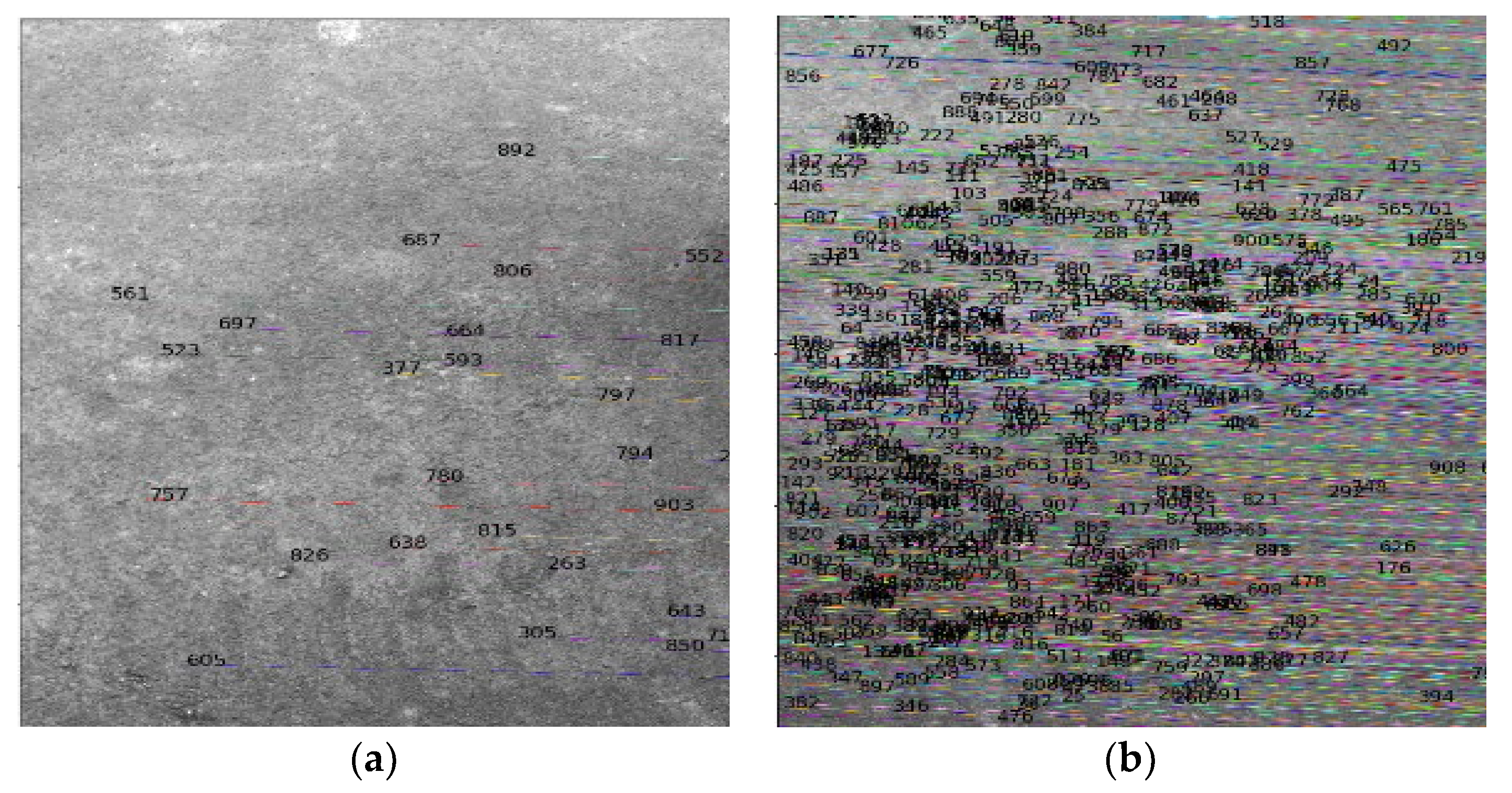
- The matching part utilizes the gridding siftGPU method, wherein first the common area of the left and right cameras is determined and, then, grid zoning for the common area is carried out. The grid coordinates of the left camera are used to preliminarily locate the corresponding grid coordinates of the right camera and GPU multithreading processing is used in order to realize multi feature points and fast matching. Compared with the conventional siftGPU, the matching time with the proposed approach can be controlled below 6 s while the number of matching points can be maintained above 20,000, an outcome that is evidently much better than that of the traditional siftGPU algorithm.
- (2)
- In this paper, the least squares method and wave theory are used to normalize the sea surface-based plane calibration, plane error point fitting, and wave parameter inversion. The design’s method is simple and feasible. Compared with the traditional wave height meter, the wave height range is 0.2 m–1 m, the measurement error is less than 10%, and the periodic measurement error is less than 0.5 s.
- (3)
- The Hough transform and least squares method have been used herein to calculate the wave’s direction value. It was observed that, for a given wave image, the detection results and the original direction are basically the same.
2. Materials and Methods
2.1. Stereo Calibration
- (1)
- Construct a checkerboard calibration board with black and white grids, wherein the length and size of the black and white grids are 10 cm and 9 cm × 7 cm, respectively.
- (2)
- Use the binocular camera to take 25 images of the calibration board from different angles.
- (3)
- Use the algorithm to identify the pixel coordinates of the corner points (i.e., the black and white grid intersections) in the image for matching.
- (4)
- Calculate the inversion in order to obtain the internal parameters, external parameters, and lens distortion coefficients of the binocular camera.
2.2. Stereo Matching
2.2.1. Scale-Invariant Feature Transform (SIFT) Feature Extraction and Matching
2.2.2. Gridding SiftGPU Feature Extraction and Matching
2.3. Sea Surface Base Plane Calibration
2.4. Wave Parameter Inversion
- 1.
- Wave Height and Period
- 2.
- Wave Direction
- Use a two-dimensional Gaussian function to the detect the extreme points. Obtain the coordinates of those extreme points .
- Convert the planar coordinates to polar coordinates () by using:
- Calculate the maximum value with a two-dimensional accumulator as:
3. Results
3.1. Laboratory Verification
- Calibration Results
- 2.
- Gridding siftGPU Parameter Calculation
- 3.
- Calibration Results for the Base Plane
3.2. Offshore Test Verification
4. Discussion
- (1)
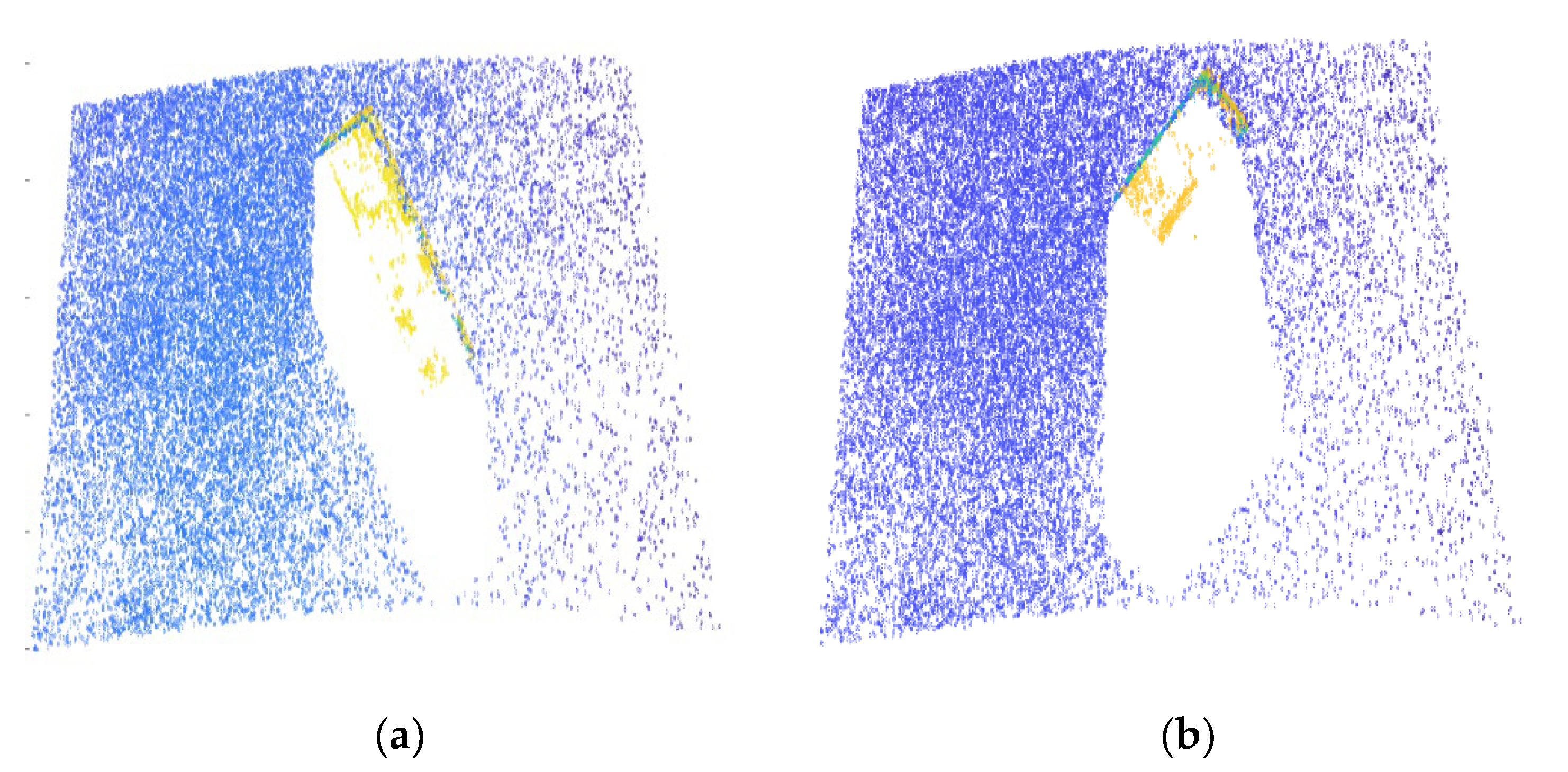
- Relying on the actual sea trial measurement results, it can be confirmed that the stereo vision wave measurement method can enable the accurate measurement of wave parameters (wave height, period, and wave direction) [30]. This is because the stereo vision technology uses the parallax formula to calculate the distance to the measured object, while the height of the object can be measured through corresponding coordinate conversion. Through the calculation of the elevation value of a fixed area, the wave height and the period of the sea wave can be analyzed. Furthermore, the wave direction can be detected using the normal vector of the wave crest line in the image, therefore it is necessary to recognize and fit the line features.
- (2)
- In order to realize a real-time operation of the whole process algorithm, the richness of the wave field’s features, and the accuracy of the measurement results, it is necessary to use a high-resolution camera for the measurement. However, this results in a too long matching time and very high computer memory costs. In this regard, the gridding siftGPU algorithm that is proposed in this paper considers that the common area of the left and right images can be gridded without down-sampling and the number of feature pairs can be matched using GPU multithreading processing, hence the matching is faster.
5. Conclusions
- (1)
- Compared with the conventional siftGPU, based on 6280 × 4210 image processing, the matching time can be controlled below 6 s and the number of matching points can be kept above 20,000, indicating much better performance than that of the traditional siftGPU algorithm.
- (2)
- In this paper, the least squares method and wave theory have been used to normalize the sea surface base plane calibration, plane error point fitting and wave parameter inversion. This design method is simple and feasible. Compared with RBR wave height measurement, the wave height range is 0.2 m–1 m, the measurement error is less than 10%, and the periodic measurement error is less than 0.5 s.
- (3)
- In this paper, the Hough transform and least squares method were used to calculate the wave direction value. Because the RBR wave height instrument does not have the function of wave direction measurement, compared with the original wave image, the detection results and original direction are basically the same.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Lin, Z.X.; Adcock, A.A.T.; McAllister Mark, L. Estimating ocean wave directional spreading using wave following buoys: A comparison of experimental buoy and gauge data. J. Ocean Eng. Mar. Energy 2022, 8, 93–97. [Google Scholar] [CrossRef]
- Christoph, J.; Berkenbrink, C.; Stumpe, B. Prediction and reconstruction of ocean wave heights based on bathymetric data using LSTM neural networks. Ocean Eng. 2021, 232, 109046. [Google Scholar]
- Makar, A. Determination of the Minimum Safe Distance between a USV and a Hydro-Engineering Structure in a Restricted Water Region Sounding. Energies 2022, 15, 2441. [Google Scholar] [CrossRef]
- Specht, C.; Lewicka, O.; Specht, M.; Dąbrowski, P.; Burdziakowski, P. Methodology for Carrying out Measurements of the Tombolo Geomorphic Landform Using Unmanned Aerial and Surface Vehicles near Sopot Pier, Poland. J. Mar. Sci. Eng. 2020, 8, 384. [Google Scholar] [CrossRef]
- Ying, W. Research on three-dimensional observation technology and application of shore based digital photography. Ocean. Univ. China 2015, 58, 239–250. [Google Scholar]
- Rossi, G.B.; Cannata, A.; Iengo, A.; Migliaccio, M.; Nardone, G.; Piscopo, V.; Zambianchi, E. Measurement of Sea Waves. Sensors 2022, 22, 78. [Google Scholar] [CrossRef]
- Wang, H.; Mouche, A.; Husson, R.; Grouazel, A.; Chapron, B.; Yang, J. Assessment of Ocean Swell Height Observations from Sentinel-1A/B Wave Mode against Buoy In Situ and Modeling Hindcasts. Remote Sens. 2022, 14, 862. [Google Scholar] [CrossRef]
- Bergamasco, F.; Benetazzo, A. Spatially Distributed Sea Wave Measurements. J. Mar. Sci. Eng. 2021, 9, 238. [Google Scholar] [CrossRef]
- Sun, X.; Jiang, Y.; Ji, Y.; Fu, W.; Yan, S.; Chen, Q.; Yu, B.; Gan, X. Distance Measurement System Based on Binocular Stereo Vision In IOP Conference Series: Earth and Environmental Science; IOP Publishing: Bristol, UK, 2019; Volume 252, pp. 1500–1504. [Google Scholar]
- Xie, H.Z.; Yao, H.X.; Zhou, S.C.; Zhang, S.P.; Tong, X.J.; Sun, W.X. Toward 3D object reconstruction from stereo images. Neurocomputing 2021, 463, 950–955. [Google Scholar] [CrossRef]
- Nagano, A. Three-dimensional videography using omnidirectional cameras: An approach inspired by the direct linear transformation method. J. Biomech. 2021, 128, 110722. [Google Scholar] [CrossRef]
- De Vries, S.; Hill, D.F.; De Schipper, M.A.; Stive, M.J.F. Remote sensing of surf zone waves using stereo imaging. Coast. Eng. 2011, 58, 239–250. [Google Scholar] [CrossRef]
- De Vries, S.; Hill, D.; De Schipper, M.A.; Stive, M.J.F. Using Stereo Photogrammetry to Measure Coastal Wavs. J. Coast. Res. 2009, 58, 1484–1488. [Google Scholar]
- Justin, M.W.; Chin, H.W. Automated trinocular stereo imaging system for three-dimensional surface wave measurements. Ocean. Eng. 2005, 33, 255–259. [Google Scholar]
- Guillaume, G.; Ludovic, C.; Damien, C.; Laurent, D. Free surface measurement by stereo-refraction. Exp. Fluids Exp. Methods Appl. Fluid Flow 2013, 54, 1900–1904. [Google Scholar]
- Cai, Z.H.; Dong, D.J.; Zhou, Y.Y. Research and development of stereo sea state photography technology. Taiwan Cent. Meteorol. Adm. 2010, 36, 101–106. [Google Scholar]
- Yu, H. Research and Application of Image Measurement Method for River Regime Width and Surface Velocity of Yellow River Model. Master’s Thesis, Henan University, Henan, China, 2011. [Google Scholar]
- Jiang, W.Z. Digital stereo photography wave measurement technology. Ph.D. Thesis, Ocean University of China, Qingdao, China, 2012. [Google Scholar]
- Zheng, K.; Jiang, W.Z.; Lu, X.; Wang, S.L. Three dimensional reconstruction of wave surface based on binocular stereo vision. Sci. Technol. Eng. 2021, 21, 735–740. [Google Scholar]
- Wei, S. Research on Wave Contour Measurement Based on Binocular Vision. Master’s Thesis, Harbin Engineering University, Harbin, China, 2015. [Google Scholar]
- Li, T.; Zhou, M. ECG classification using wavelet packet entropy and random forests. Entropy 2016, 18, 285. [Google Scholar] [CrossRef]
- Hagemann, A.; Knorr, M.; Janssen, H.; Stiller, C. Inferring Bias and Uncertainty in Camera Calibration. Int. J. Comput. Vis. 2022, 130, 17–32. [Google Scholar] [CrossRef]
- Mei, Z.; Wang, Y.; Li, Q.Y. Research on Moving Target Detection and Tracking Technology in Sports Video Based on SIFT Algorithm. Adv. Multimed. 2022, 2022, 1900–1905. [Google Scholar] [CrossRef]
- Zhang, Y.M.; Shu, J.; Hu, L.; Zhou, Q.; Du, Z.R. A Ship Target Tracking Algorithm Based on Deep Learning and Multiple Features. In Twelfth International Conference on Machine Vision (ICMV 2019); SPIE: Washington, WA, USA, 2020; Volume 11433, pp. 19–26. [Google Scholar]
- Wang, Y.C.; Yuan, Y.J.; Zhao, L. Fast SIFT Feature Matching Algorithm Based on Geometric Transformation. IEEE Access 2020, 8, 735–740. [Google Scholar] [CrossRef]
- Sun, H.Q.; Li, B.G.; Jin, Y.Y. Research on Fingerprint Cipher Based on SIFT Feature Matching Principle. Int. J. High. Educ. Teach. Theory 2021, 2, 16–20. [Google Scholar]
- Yang, J.R.; Huang, J.W.; Jiang, Z.Y.; Dong, S.B.; Tang, L.Q.; Liu, Y.P.; Liu, Z.J.; Zhou, L.C. 3D SIFT aided path independent digital volume correlation and its GPU acceleration. Opt. Lasers Eng. 2021, 136, 1177–1180. [Google Scholar] [CrossRef]
- Li, J.S.; Yun, P. GPU-based parallel optimization for real-time scale-invariant feature transform in binocular visual registration. Pers. Ubiquitous Comput. 2019, 23, 465–474. [Google Scholar] [CrossRef]
- Li, Z.H.; Jia, H.P.; Zhang, Y.Q.; Li, S.G.; Wang, X.; Zhang, H. Efficient parallel optimizations of a high-performance SIFT on GPUs. J. Parallel Distrib. Comput. 2018, 124, 79–91. [Google Scholar] [CrossRef]
- Filippo, B.; Alvise, B.; Francesco, B.; Sandro, C.; Mauro, S. Multi-view horizon-driven sea plane estimation for stereo wave imaging on moving vessels. Comput. Geosci. 2016, 95, 127–132. [Google Scholar]
- Alexis, M.; James, H.; Jason, F.; John, R.; Frederic, D. Incorporating Wave Spectrum Information in Real-time Free-surface Elevation Forecasting: Real-sea Experiments. IFAC Pap. 2018, 51, 225–230. [Google Scholar]
- Zhang, X.X.; Liu, Q.; Liu, J.G.; Zhang, T.; Niz, Y. Binocular Stereo Vision Based Obstacle Detection Method for Manipulator. In Proceedings of the 2016 International Conference on Electrical Engineering and Automation (ICEEA2016), Hangzhou, China, 24–25 April 2016; 439–447. [Google Scholar]
- Zhang, J.; Ye, L.; Zhang, Q.; Wang, J.J. Three-Dimensional Object Surface Reconstruction Based on Camera Calibration and SIFT. Appl. Mech. Mater. 2015, 3749, 719–720. [Google Scholar] [CrossRef]
- Jansen, E. Deepwater Drilling Milestone Motion Compensation Platform Enables Offshore Drilling from Vessel. Sea Technol. 2020, 61, 1712–1715. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Code No. | Title 2 |
|---|---|
| Left camera internal reference (pixel) | |
| Right camera internal reference (pixel) | |
| Distortion coefficient of left camera (pixel) | |
| Distortion coefficient of right camera (pixel) | |
| Common area boundary parameters (pixel) | |
| Rotation matrix (pixel) | |
| Translation matrix (pixel) |
| Code No. | siftGPU | Gridding siftGPU |
|---|---|---|
| Threshold | 0.5 | 0.5 |
| Image 1 matching time (s) | 31.7 | 6 |
| Image 1 matching no. | 3003 | 24,424 |
| Image 2 matching time (s) | 29.9 | 5.8 |
| Image 2 matching no. | 2996 | 24,321 |
| Code No. | ul (mm) | vl (mm) | ur (mm) | vr (mm) |
|---|---|---|---|---|
| 561 | 462.869 | 1400.559 | 117.233 | 1557.912 |
| 523 | 602.897 | 1604.144 | 244.895 | 1763.765 |
| 757 | 569.487 | 2124.842 | 181.769 | 2283.181 |
| 697 | 758.91 | 1509.639 | 404.889 | 1673.864 |
| 605 | 676.614 | 2716.894 | 254.76 | 2878.093 |
| 826 | 956.753 | 2342.16 | 553.65 | 2510.346 |
| 687 | 1266.115 | 1209.11 | 926.654 | 1386.103 |
| 377 | 1207.998 | 1668.579 | 843.952 | 1843.557 |
| 638 | 1228.33 | 2294.944 | 828.212 | 2470.034 |
| 892 | 1526.094 | 886.002 | 3618.396 | 2288.871 |
| 664 | 1388.562 | 1534.327 | 1030.845 | 1714.759 |
| 593 | 1378.192 | 1638.199 | 1014.254 | 1818.597 |
| 780 | 1326.869 | 2057.044 | 940.375 | 2235.672 |
| 806 | 1513.996 | 1317.925 | 1168.24 | 1501.776 |
| 815 | 1471.925 | 2253.082 | 1072.941 | 2435.356 |
| 867 | 4628.848 | 346.125 | 4336.211 | 608.107 |
| 872 | 4956.792 | 1102.291 | 4623.232 | 1372.855 |
| 553 | 4666.975 | 1550.444 | 4307.868 | 1814.572 |
| 339 | 4113.929 | 1368.649 | 3762.998 | 1618.408 |
| 927 | 4781.349 | 1701.514 | 4414.901 | 1968.805 |
| Code No. | x (mm) | y (mm) | z (mm) | Calibration Box Width (mm) | Error |
|---|---|---|---|---|---|
| 7 | 63.67009 | 483.8519 | 690.5644 | 690 | 0.08% |
| 8 | 102.5964 | 349.7061 | 692.4865 | 690 | 0.36% |
| 9 | 157.9489 | −134.73 | 689.9507 | 690 | 0.01% |
| 10 | −127.546 | 750.4248 | 696.5345 | 690 | 0.95% |
| 11 | −127.597 | 745.3457 | 691.4332 | 690 | 0.21% |
| 12 | 56.47901 | 491.2691 | 685.9605 | 690 | 0.59% |
| 13 | 102.3608 | 353.218 | 695.7244 | 690 | 0.83% |
| 14 | −133.579 | 377.7314 | 691.3577 | 690 | 0.20% |
| 15 | 92.31968 | 365.5422 | 690.5268 | 690 | 0.08% |
| 16 | 232.3613 | −295.85 | 688.9657 | 690 | 0.15% |
| 17 | 114.8581 | −181.829 | 690.5955 | 690 | 0.09% |
| 20 | 42.98887 | 480.5747 | 692.0436 | 690 | 0.30% |
| 21 | −109.301 | 716.635 | 694.6232 | 690 | 0.67% |
| 22 | 119.2851 | 316.8094 | 689.2604 | 690 | 0.11% |
| Code No. | x (mm) | y (mm) | z (mm) | Calibration Box Height (mm) | Error |
|---|---|---|---|---|---|
| 1 | −164.961 | 424.689 | 1202.88 | 1204 | 0.09% |
| 2 | −101.668 | 237.8386 | 1202.787 | 1204 | 0.10% |
| 3 | −206.176 | 433.3536 | 1208.533 | 1204 | 0.38% |
| 4 | −155.174 | 375.2888 | 1202.448 | 1204 | 0.13% |
| 5 | −102.034 | 231.6729 | 1197.777 | 1204 | 0.52% |
| 6 | −250.352 | 385.6709 | 1207.963 | 1204 | 0.33% |
| 7 | −155.551 | 376.6541 | 1203.015 | 1204 | 0.08% |
| 8 | −133.514 | 398.3701 | 1200.575 | 1204 | 0.28% |
| 9 | −183.244 | 358.0353 | 1205.239 | 1204 | 0.10% |
| 10 | −229.913 | 410.1861 | 1208.479 | 1204 | 0.37% |
| 11 | 221.4955 | 801.7397 | 1185.754 | 1204 | 1.52% |
| 12 | −194.046 | 434.6676 | 1207.884 | 1204 | 0.32% |
| 13 | −233.126 | 391.6223 | 1211.303 | 1204 | 0.61% |
| 14 | −171.595 | 490.7635 | 1206.244 | 1204 | 0.19% |
| Time | Parameter | RBR | Stereo Vision | Error |
|---|---|---|---|---|
| 14:00 | 1/3 wave height (m) | 0.870 | 0.857 | 1.5% |
| 1/10 wave height (m) | 1.160 | 1.107 | 4.6% | |
| 1/100 wave height (m) | 1.498 | 1.447 | 3.4% | |
| Average wave height (m) | 0.556 | 0.552 | 0.7% | |
| Wave period (s) | 6.167 | 6.615 | 0.45 | |
| 15:00 | 1/3 wave height (m) | 0.945 | 0.942 | 0.3% |
| 1/10 wave height (m) | 1.203 | 1.220 | 1.4% | |
| 1/100 wave height (m) | 1.476 | 1.594 | 8.0% | |
| Average wave height (m) | 0.615 | 0.622 | 0.1% | |
| Wave period (s) | 6.903 | 7.054 | 0.35 | |
| 16:00 | 1/3 wave height (m) | 1.033 | 1.029 | 0.3% |
| 1/10 wave height (m) | 1.309 | 1.300 | 1.4% | |
| 1/100 wave height (m) | 1.704 | 1.639 | 8.0% | |
| Average wave height (m) | 0.689 | 0.716 | 0.1% | |
| Wave period (s) | 6.407 | 6.728 | 0.32 |
| Time | Parameter | Coordinate (−320, 0) | Coordinate (0, 0) | Error |
|---|---|---|---|---|
| 14:00 | 1/3 wave height (m) | 0.942 | 0.939 | 0.3% |
| 1/10 wave height (m) | 1.220 | 1.218 | 1.4% | |
| 1/100 wave height (m) | 1.594 | 1.602 | 8.0% | |
| Average wave height (m) | 0.622 | 0.625 | 0.1% | |
| Wave period (s) | 7.054 | 7.253 | 0.35 |
| Time | Parameter | RBR | Stereo Vision | Error |
|---|---|---|---|---|
| 14:00 | Wave direction (degrees) | 170 | 175 | 5 |
| 15:00 | Wave direction (degrees) | 171 | 177 | 6 |
| 16:00 | Wave direction (degrees) | 170 | 172 | 2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, H.; Wu, G.; Wang, X.; Zhang, T.; Zhang, P.; Chen, W.; Zhu, Q. Research on a Measurement Method for the Ocean Wave Field Based on Stereo Vision. Appl. Sci. 2022, 12, 7447. https://doi.org/10.3390/app12157447
Sun H, Wu G, Wang X, Zhang T, Zhang P, Chen W, Zhu Q. Research on a Measurement Method for the Ocean Wave Field Based on Stereo Vision. Applied Sciences. 2022; 12(15):7447. https://doi.org/10.3390/app12157447
Chicago/Turabian StyleSun, Hanyu, Guoqing Wu, Xueliang Wang, Tao Zhang, Pu Zhang, Wei Chen, and Quanhua Zhu. 2022. "Research on a Measurement Method for the Ocean Wave Field Based on Stereo Vision" Applied Sciences 12, no. 15: 7447. https://doi.org/10.3390/app12157447
APA StyleSun, H., Wu, G., Wang, X., Zhang, T., Zhang, P., Chen, W., & Zhu, Q. (2022). Research on a Measurement Method for the Ocean Wave Field Based on Stereo Vision. Applied Sciences, 12(15), 7447. https://doi.org/10.3390/app12157447